Dynamic Modeling of Multiple Microgrid Clusters Using Regional Demand Response Programs


 and
and 
Abstract
1. Introduction
- The absence of a suitable dynamic model is one of the serious challenges for a study on LFC in multiple microgrid clusters, which restricts research activities in this field. Modeling can be done for a variety of goals. Thus, using a suitable model for a specific study goal is the preferred option. The present paper provides a suitable dynamic model for multiple microgrid clusters based on tie-lines for studying the frequency and tie-line power control.
- In this study, the Monte Carlo simulation was used to generate scenarios regarding the uncertainties of RERs and loads by considering probability distribution functions when modeling them. However, due to the uncertainties in RERs and loads, the conventional controllers, such as PID controllers, will not be suitable for LFC. Hence, adjusting the control parameters was suggested by using the ICA to solve this problem.
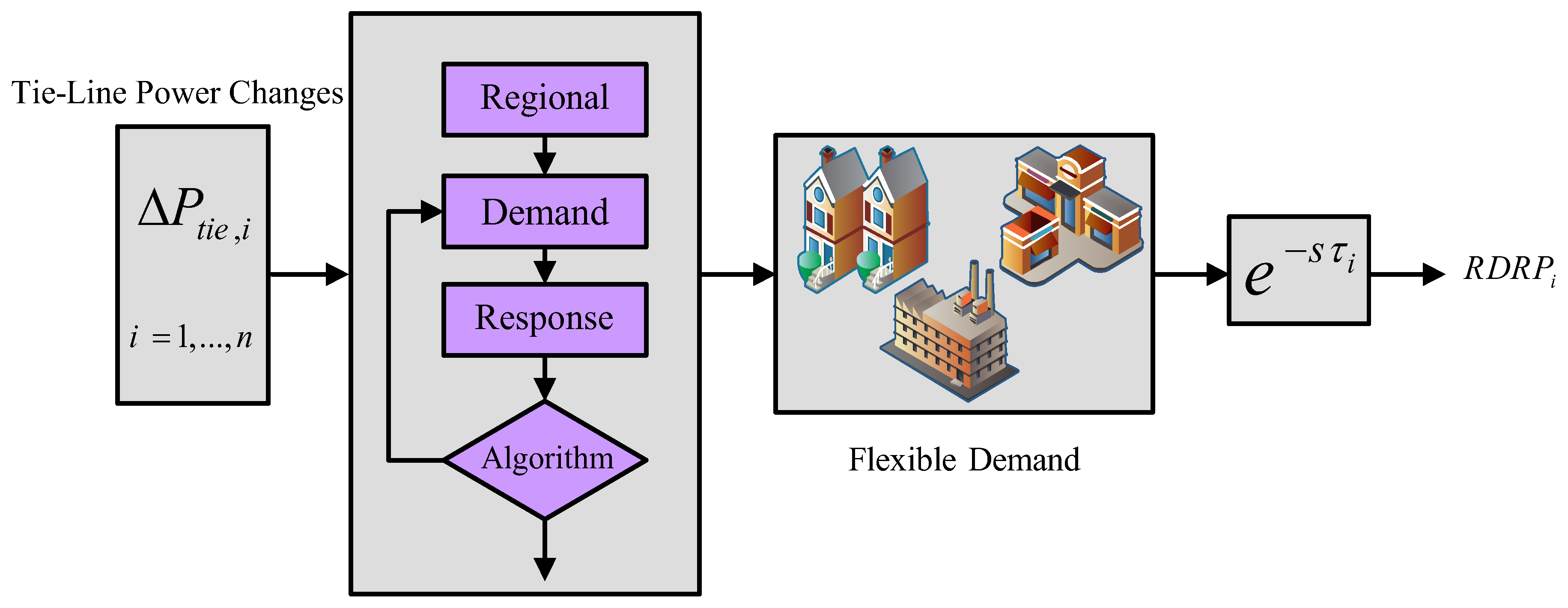
- Damping frequency fluctuations is one of the main issues of frequency control in power systems and microgrids. Due to its fast dynamics, the demand response program could be an attractive suggestion for damping system frequency fluctuations. Opposed to the other works, the regional demand response program is simpler and more accurate, and does not require complex and massive computational calculations. Furthermore, this method is applicable to almost all types of loads by considering the load’s participation coefficient in each region during the frequency control. Therefore, the regional demand response was applied for each microgrid in this study to reduce the frequency oscillations.
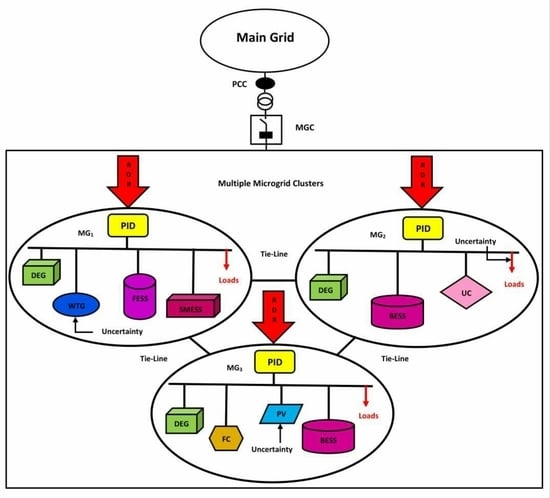
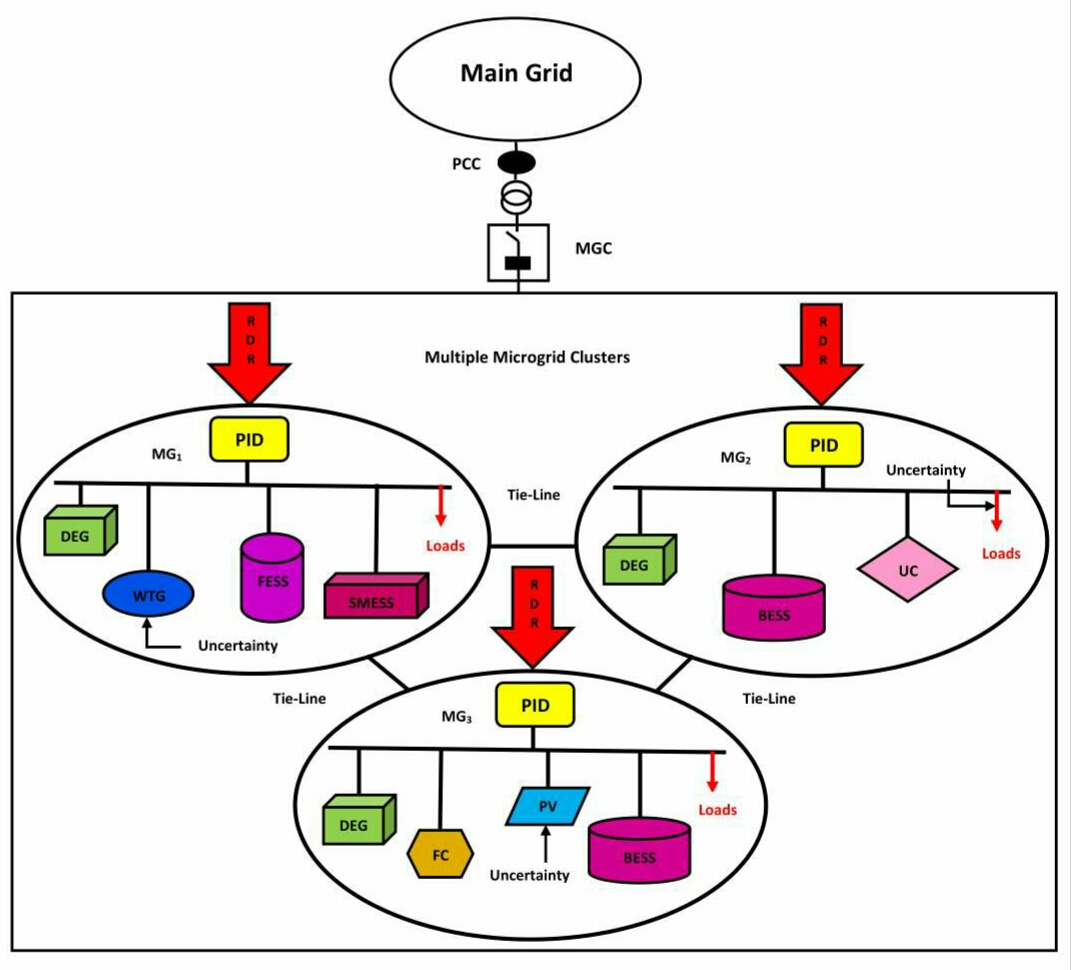
2. Case Study
3. Modeling of Units
3.1. Modeling of the Diesel Engine Generator (DEG)
3.2. Modeling of the Fuel Cell (FC)
3.3. Modeling of the Wind Turbine (WT) Generator
3.4. Modeling of the Photovoltaic (PV) Panel
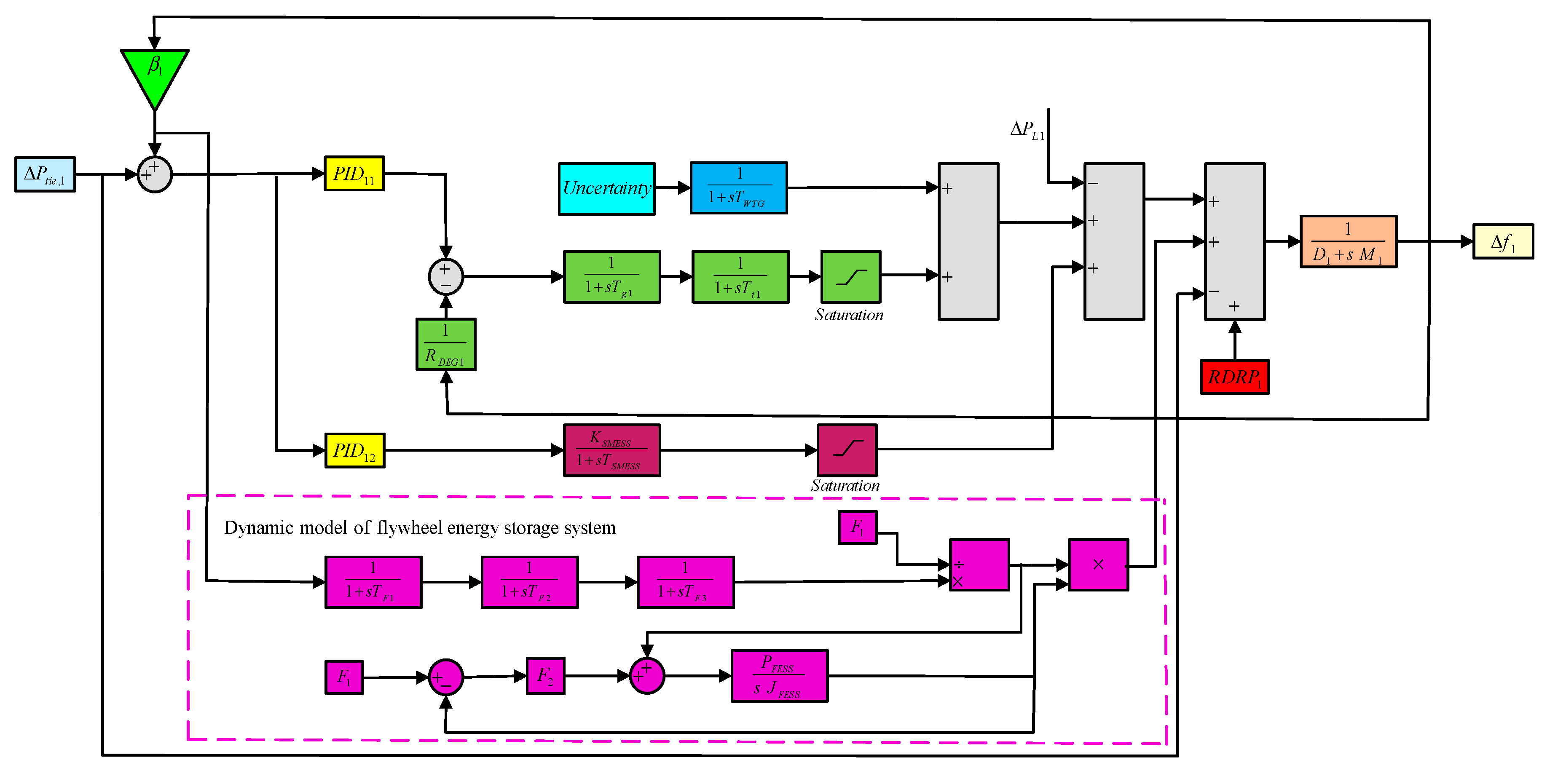
3.5. Modeling of the Flywheel Energy Storage System (FESS)
3.6. Modeling of the Superconducting Magnetic Energy Storage System (SMESS)
3.7. Modeling of the Battery Energy Storage System (BESS)
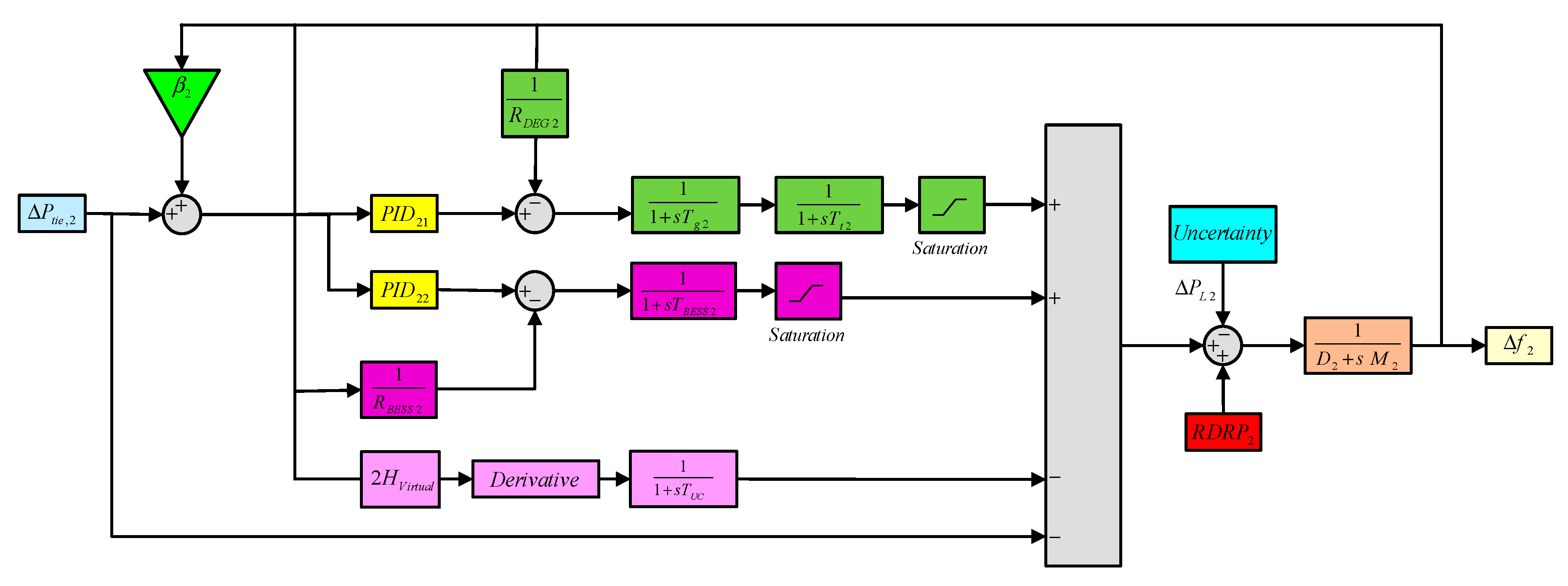
3.8. Modeling of the Ultracapacitor (UC)
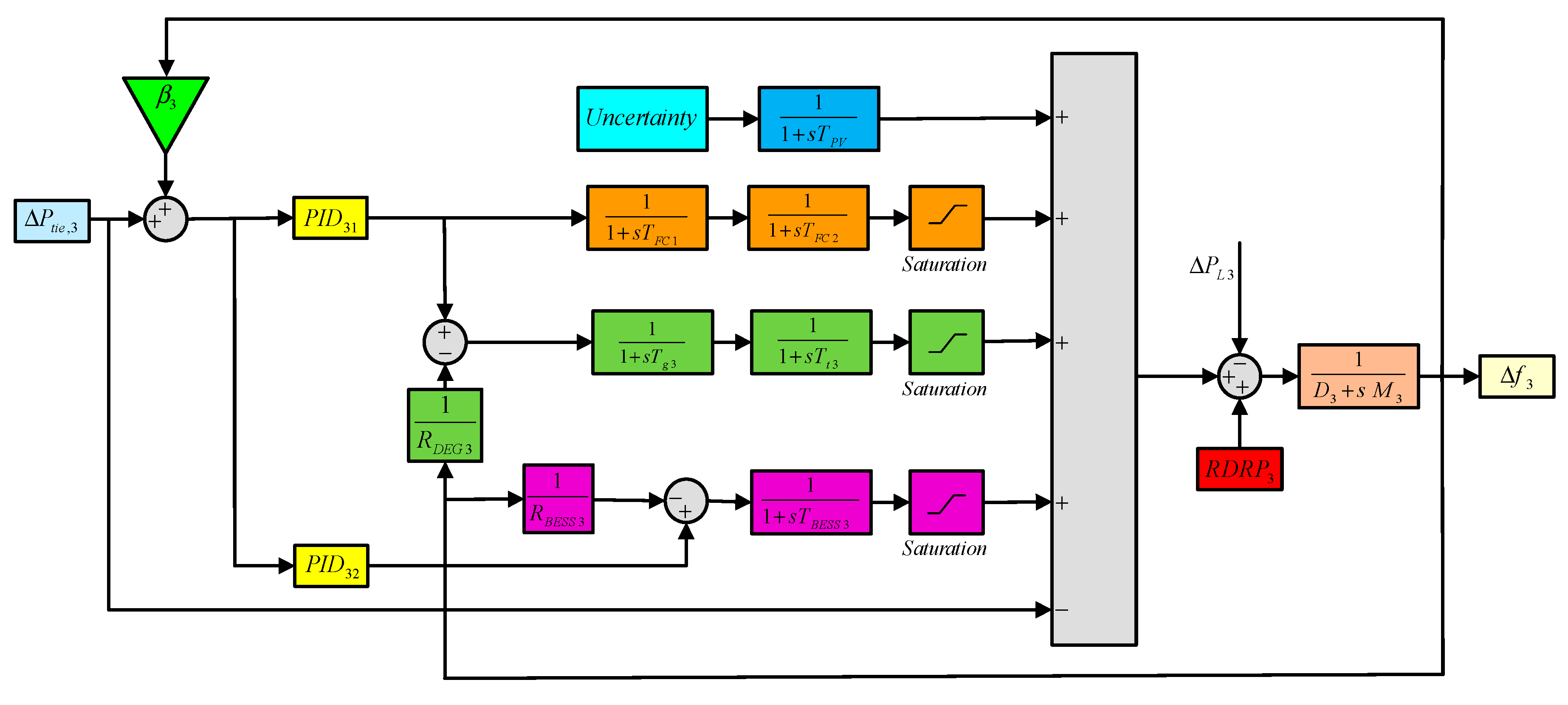
4. Modeling of the Microgrids
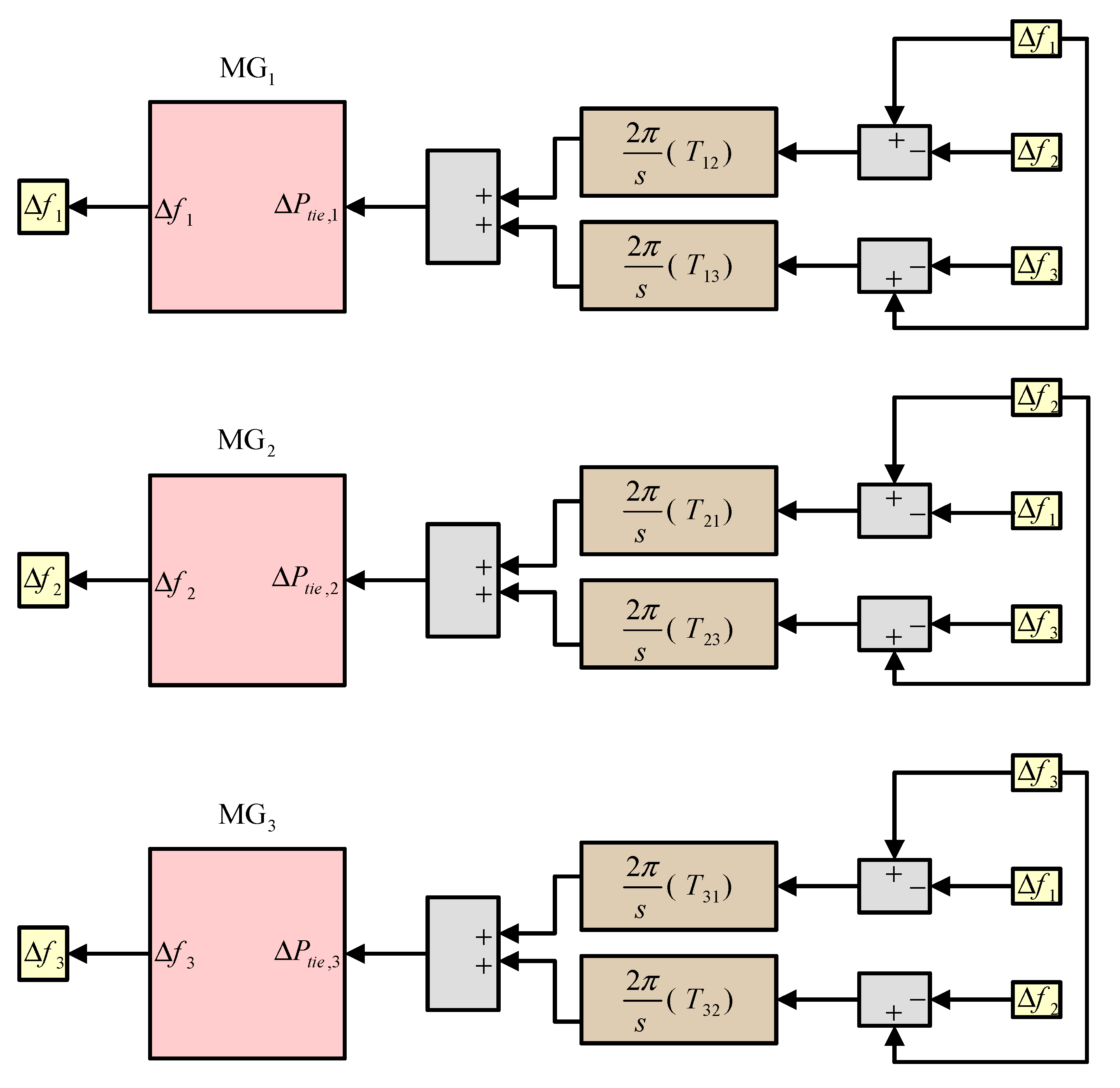
5. Modeling of the Multiple Microgrid Clusters
6. Modeling of the Uncertainties
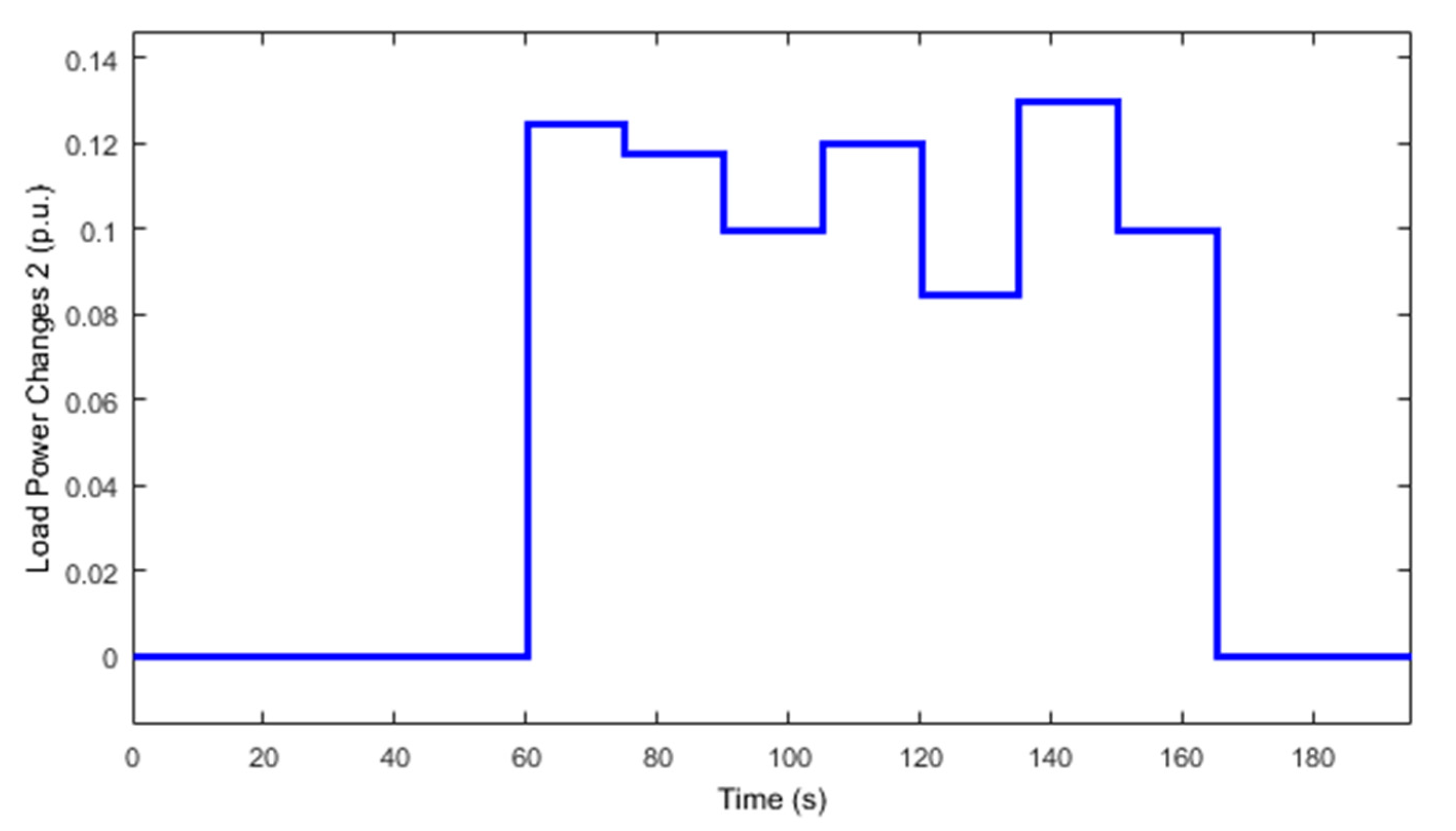
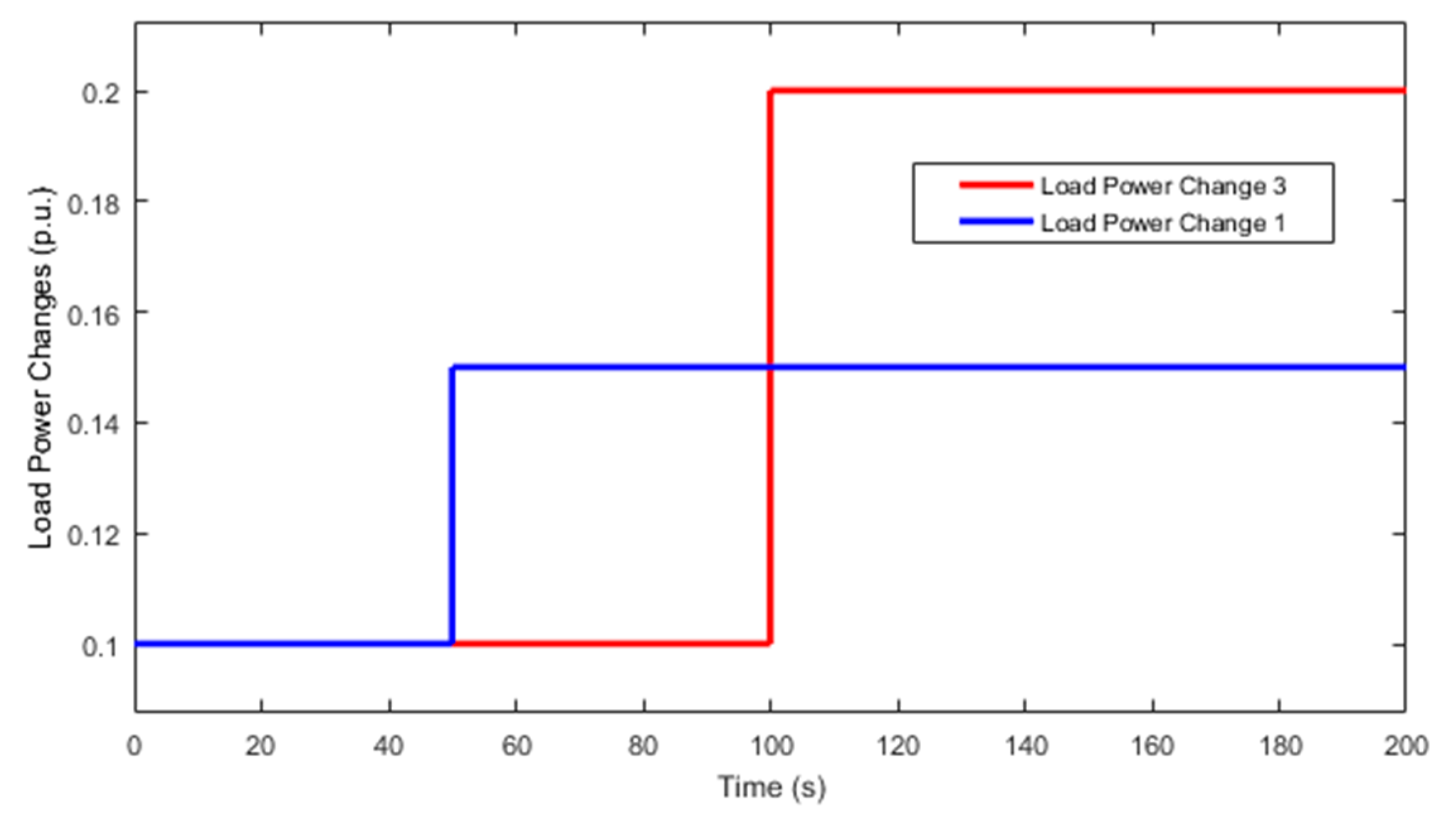
6.1. Probabilistic Model of the Load
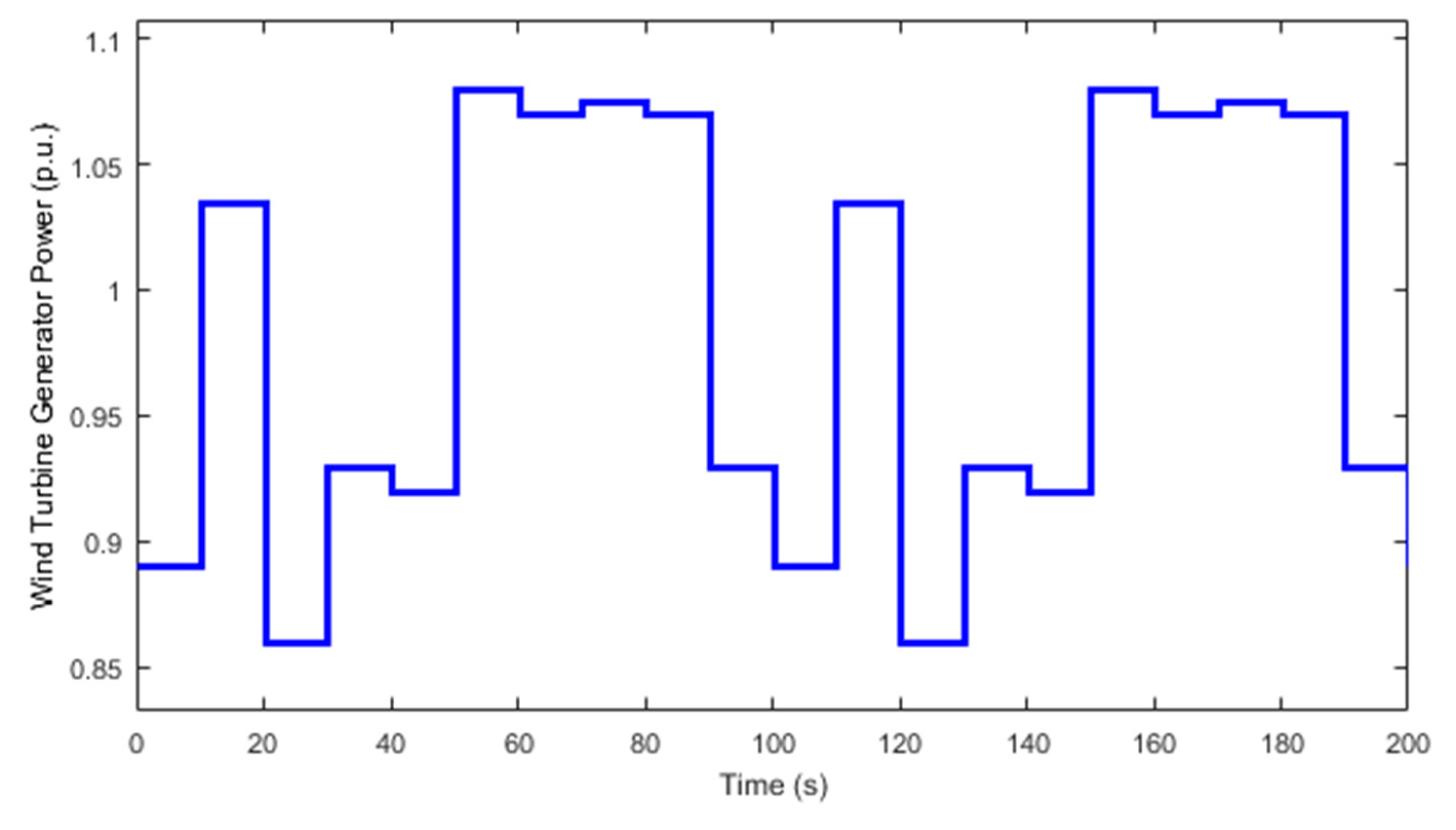
6.2. Probabilistic Model of the WT Power
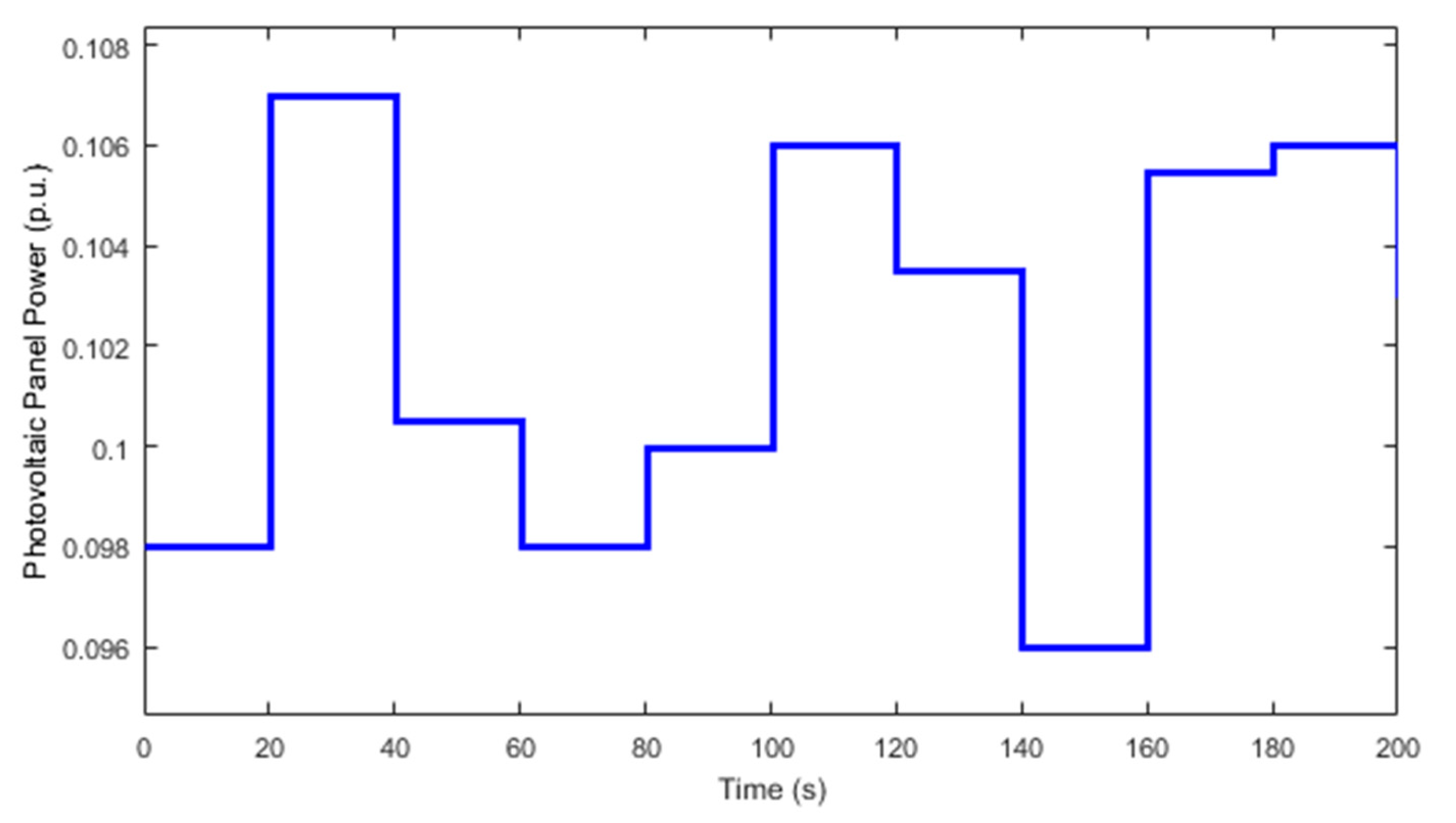
6.3. Probabilistic Model of the PV Power
6.4. Scenario Generation and Reduction
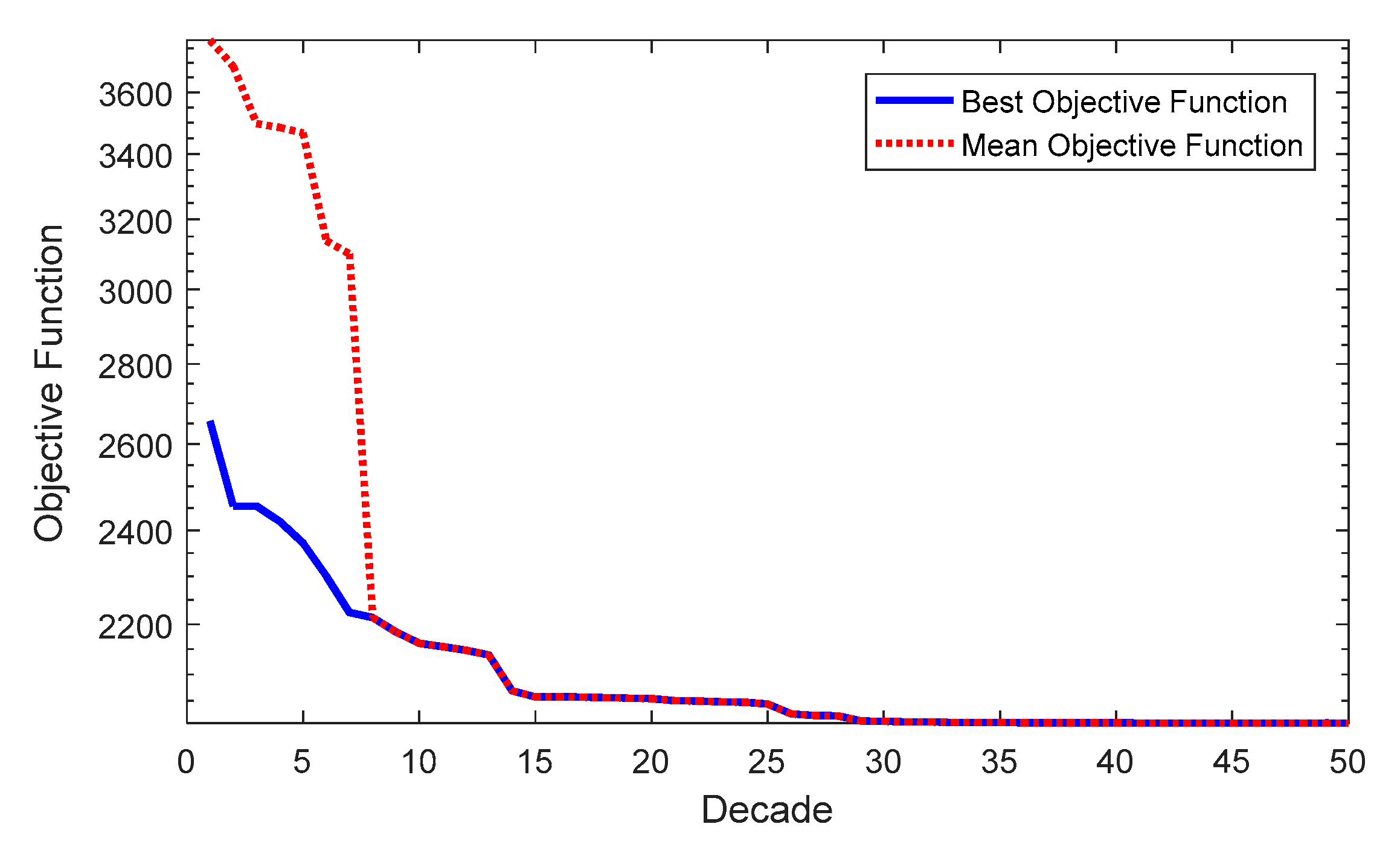
6.5. Imperialist Competitive Algorithm
7. Modeling of Regional Demand Response Programs
8. Simulation Results and Discussions
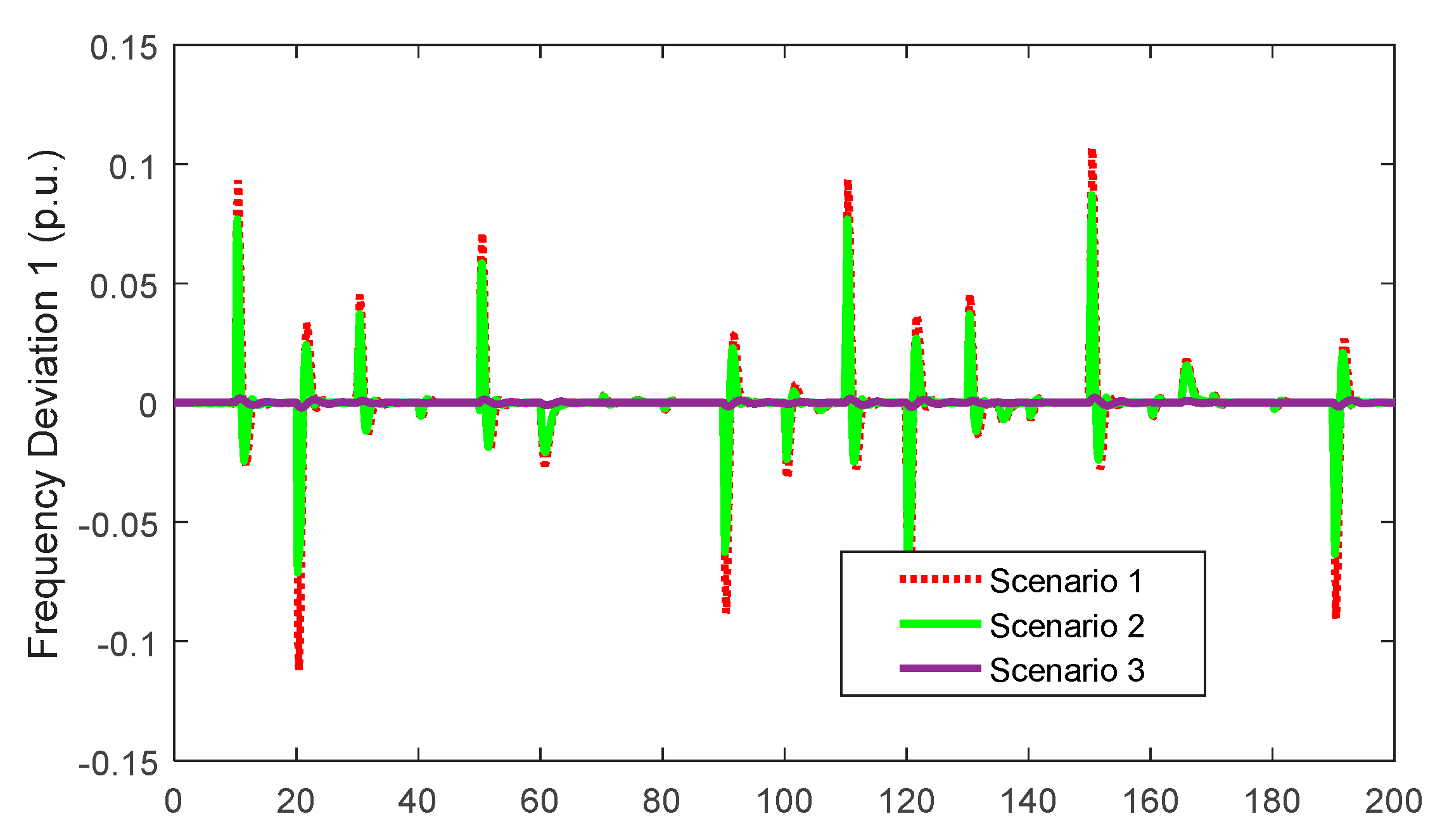
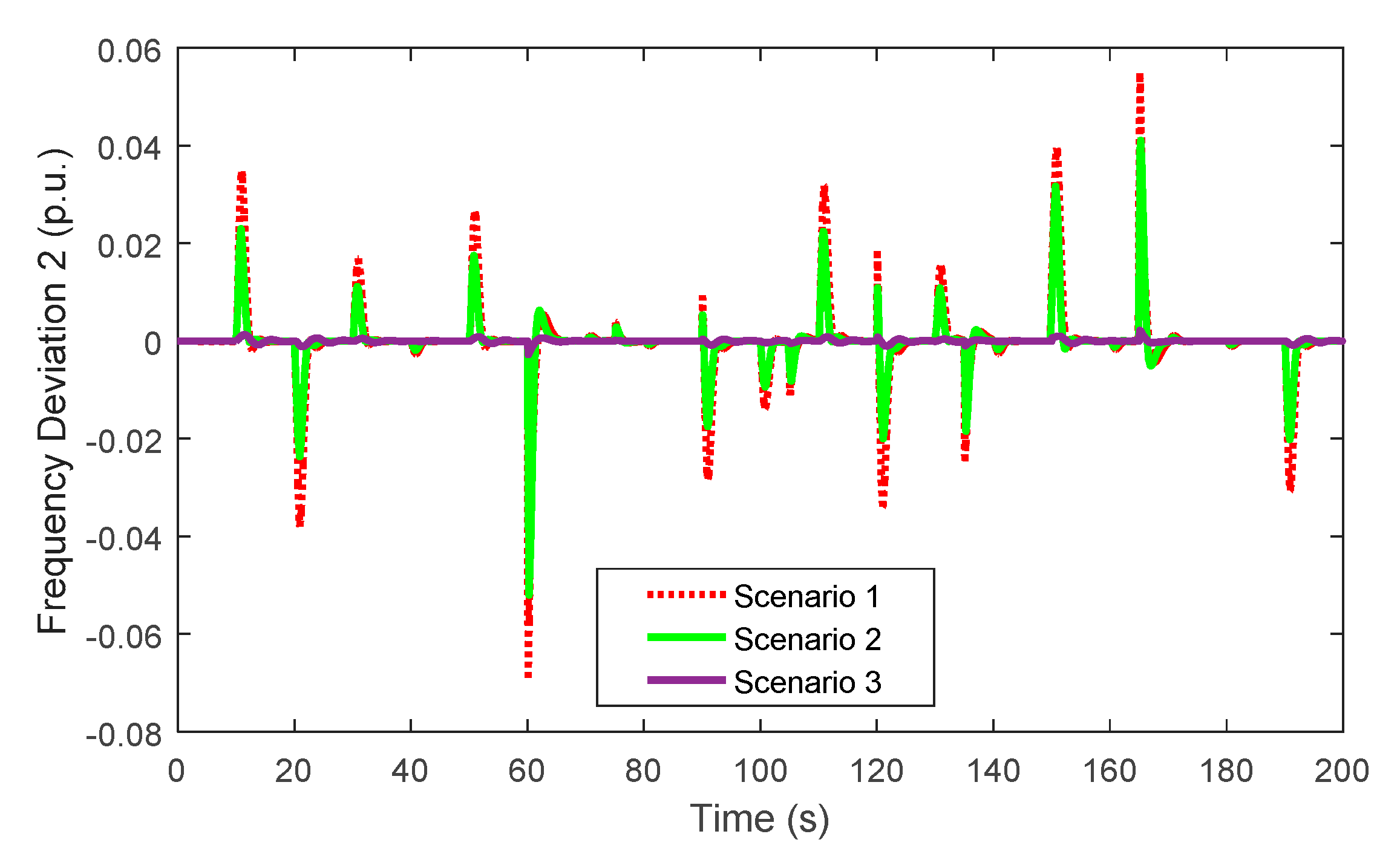
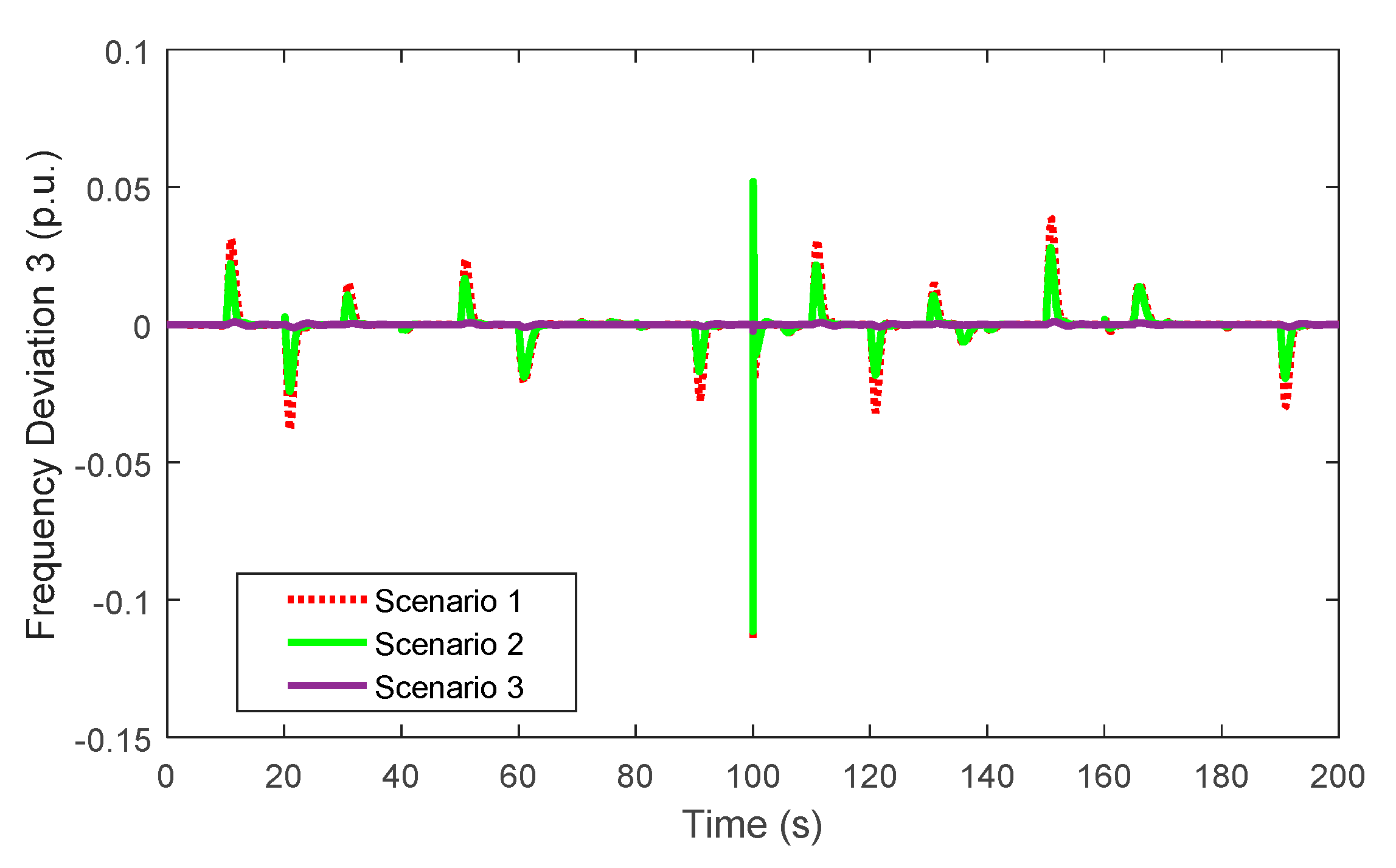
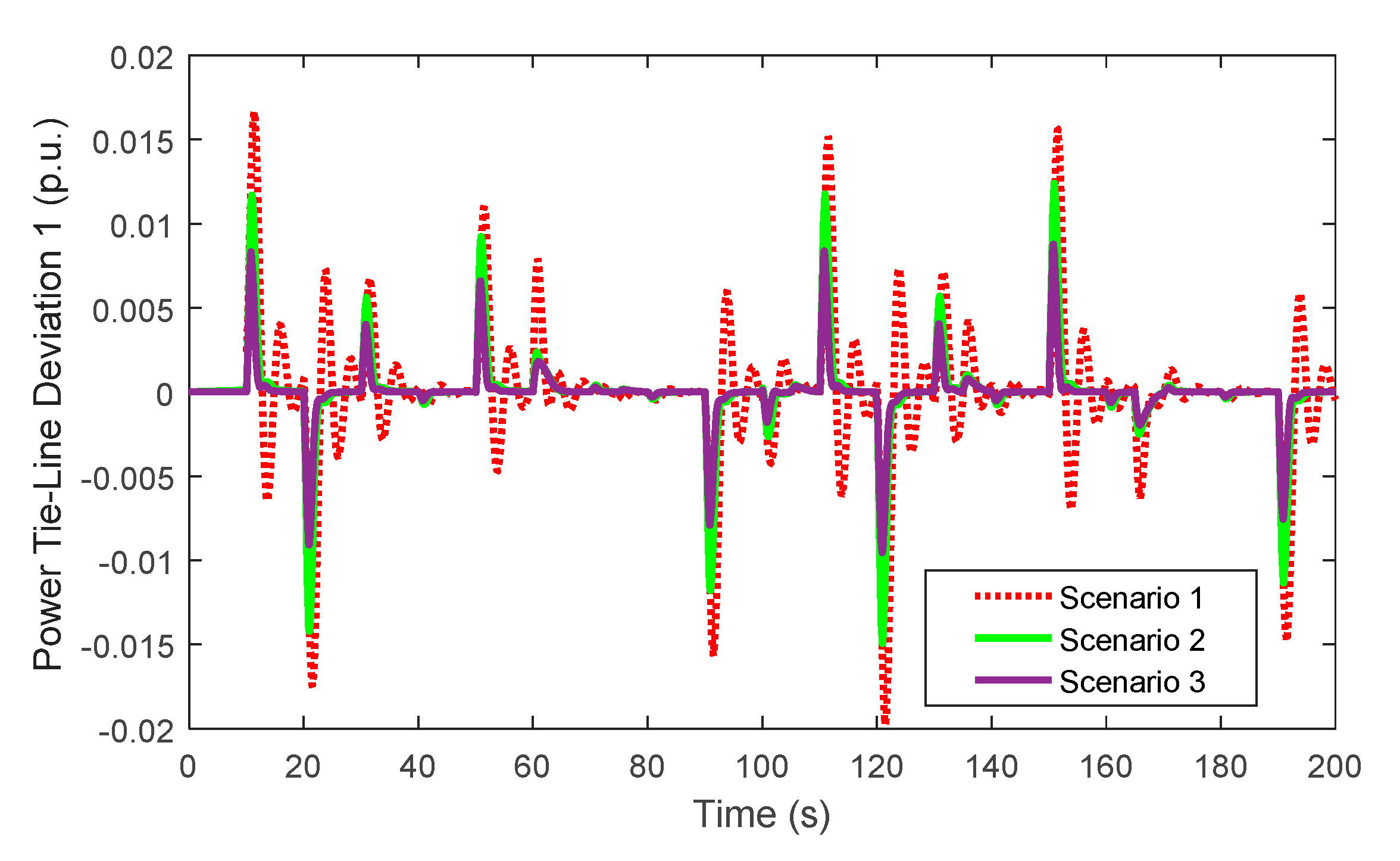
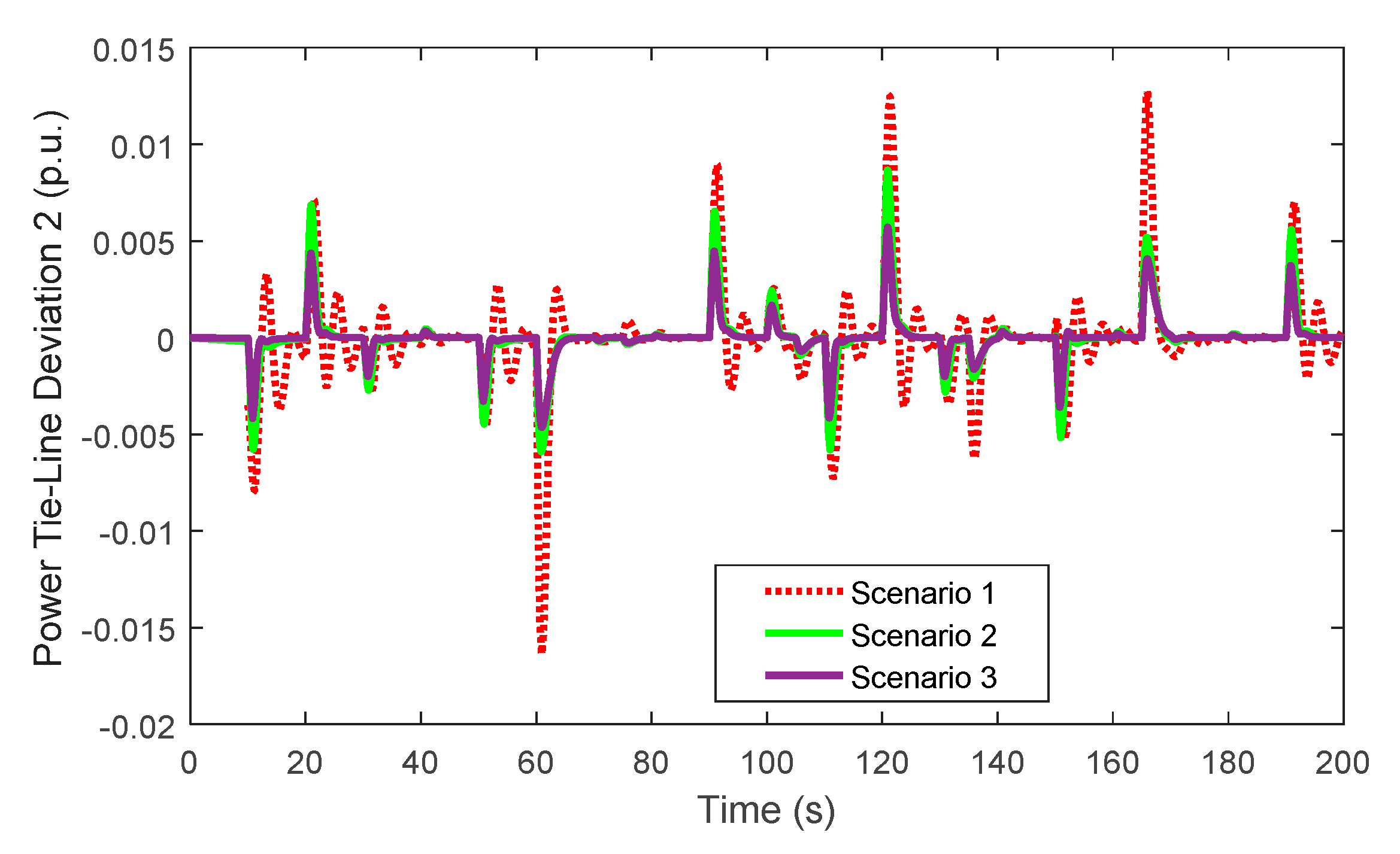
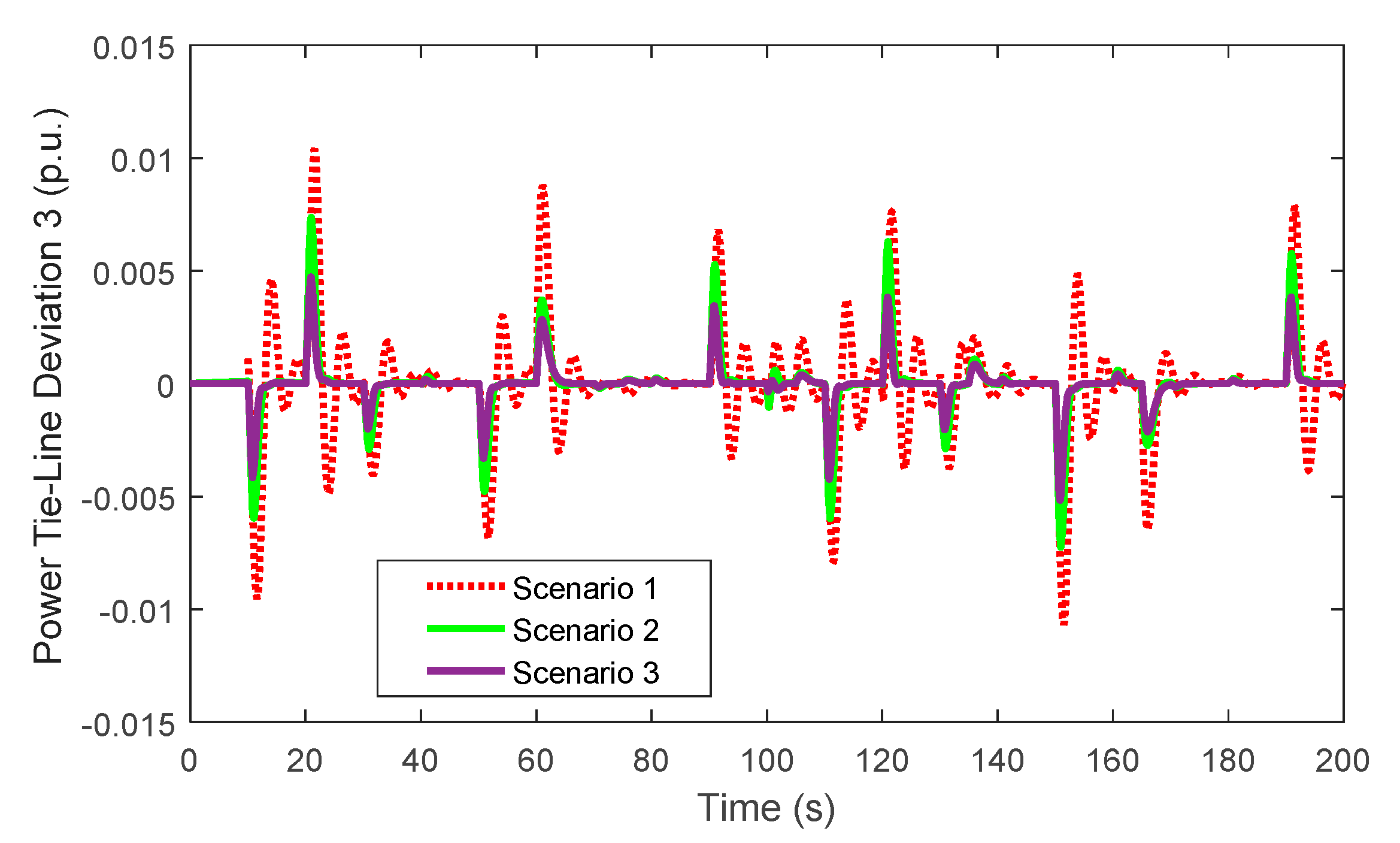
- Scenario 1: In the first scenario, the performance of the multiple microgrid clusters was studied with non-optimal parameter values.
- Scenario 2: In the second scenario, the performance of the multiple microgrid clusters was examined with the optimal control parameters.
- Scenario 3: In the third scenario, the performance of the multiple microgrid clusters was investigated by applying RDRPs.
9. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Variables | Parameters |
| Tg | Governor time constant |
| Tt | Turbine time constant |
| RDEG/ | Speed regulation coefficient of the DEG |
| TFC1/ | FC time constant |
| TFC2/ | FC feed time constant |
| TWTG | WT generator time constant |
| TPV | PV panel time constant |
| TF1 | Time constants of the measurement device |
| TF2 | Time constants of the command device |
| TF3 | Time constants of the converter |
| F1 | Reference angular speed |
| F2 | Speed regulator proportional constant |
| PFESS | Number of poles of the FESS |
| JFESS | Inertia of the rotational masses of the FESS |
| KSMESS | SMESS gain |
| TSMESS | SMESS time constant |
| TBESS | BESS time constant |
| RBESS | Speed regulation coefficient of the BESS |
| TUC | UC time constant |
| ∆fi | Frequency deviation of microgrid i |
| βi | Frequency bais of microgrid i |
| Di | Load-damping coefficient of microgrid i |
| Mi | Total inertia of microgrid i |
| ∆PLi | Load change in microgrid i |
| ∆Ptie,i | Total tie-line power change between microgrid i and other microgrids |
| Tij | Tie-line synchronizing torque coefficient |
| PL | Load power |
| μ | Mean deviation value |
| σ | Standard deviation value |
| V | Wind speed |
| Y | Scale parameters of the Weibull distribution function |
| x | Shape parameters of the Weibull distribution function |
| PWT(V) | Power generated at wind speed V by the WT generator |
| Pr,WT | Rated power of the WT generator |
| Vci | Low cut speed of the WT generator |
| Vco | High cut speed of the WT generator |
| Vr | Rated speed of the WT generator |
| PPV(R) | Power generated by the PV panel |
| Pr,PV | Rated power of the PV panel |
| R | Solar radiation |
| RC | Certain radiation point |
| RSTC | Solar radiation in the STC |
| γi | Participation factor of the demand response program of microgrid i |
| τi | Demand response program time delay of microgrid i |
| RDRPi | Calculated load for the demand response program of microgrid i |
| Kp | Proportional gain of the PID controller |
| Ki | Integral gain of the PID controller |
| Kd | Derivative gain of the PID controller |
References
- Dong, J.; Xue, G.; Dong, M.; Xu, X. Energy saving power generation dispatching in China: Regulations, pilot projects and policy recommendations-a review. Renew. Sustain. Energy Rev. 2015, 44, 1285–1300. [Google Scholar] [CrossRef]
- Bull, S.R. Renewable energy today and tomorrow. Proc. IEEE 2001, 89, 1216–1226. [Google Scholar] [CrossRef]
- Mahzarnia, M.; Sheikholeslami, A.; Adabi, J. A voltage stabilizer for a microgrid system with two types of distributed generation resources. IIUM Eng. J. 2013, 14, 191–205. [Google Scholar] [CrossRef]
- Su, C.-L. Effects of distribution system operations on voltage profiles in distribution grids connected wind power generation. In Proceedings of the 2006 International Conference on Power System Technology, Chongqing, China, 22–26 October 2006; pp. 1–7. [Google Scholar]
- Ausavanop, O.; Chaitusaney, S. Coordination of dispatchable distributed generation and voltage control devices for improving voltage profile by Tabu search. In Proceedings of the 8th Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI), Khon Kaen, Thailand, 17–19 May 2011; pp. 869–872. [Google Scholar]
- Sekhar, A.S.R.; Krishna, K.V. Improvement of voltage profile of the hybrid power system connected to the grid. Int. J. Eng. Res. Appl. 2012, 2, 087–093. [Google Scholar]
- Chang, X.; Li, Y.; Zhang, W.; Wang, N.; Xue, W. Active disturbance rejection control for a flywheel energy storage system. IEEE Trans. Ind. Electron. 2015, 62, 991–1001. [Google Scholar] [CrossRef]
- Vazquez, S.; Lukic, S.M.; Galvan, E.; Franquelo, L.G.; Carrasco, J.M. Energy storage systems for transport and grid applications. IEEE Trans. Ind. Electron. 2010, 57, 3881–3895. [Google Scholar] [CrossRef]
- Hatziargyriou, N. Microgrids: Architectures and Control; John Wiley and Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Valenciaga, F.; Puleston, P.F. Supervisor control for a stand-alone hybrid generation system using wind and photovoltaic energy. IEEE Trans. Energy Convers. 2005, 20, 398–405. [Google Scholar] [CrossRef]
- Lee, D.-J.; Wang, L. Small signal stability analysis of an autonomous hybrid renewable energy power generation/energy storage system part I: Time-domain simulations. IEEE Trans. Energy Convers. 2008, 23, 311–320. [Google Scholar] [CrossRef]
- Senjyo, T.; Nakaji, T.; Uezato, K.; Funabashi, T. A hybrid power system using alternative energy facilities in isolated island. IEEE Trans. Energy Convers. 2005, 20, 406–414. [Google Scholar] [CrossRef]
- Majumder, R.; Chaudhuri, B.; Ghosh, A.; Majumder, R.; Ledwich, G.; Zare, F. Improvement of stability and load sharing in an autonomous microgrid using supplementary droop control loop. IEEE Trans. Power Syst. 2010, 25, 796–808. [Google Scholar] [CrossRef]
- Diaz, G.; Gonzalez-Moran, C.; Gomez-Aleixandre, J.; Diez, A. Scheduling of droop coefficients for frequency and voltage regulation in isolated microgrids. IEEE Trans. Power Syst. 2010, 25, 489–496. [Google Scholar] [CrossRef]
- Ayaz, M.S.; Azizipanah-Abarghooee, R.; Terzija, V. European LV microgrid benchmark network: Development and frequency response analysis. In Proceedings of the 2018 IEEE International Energy (ENERGYCON), Limassol, Cyprus, 3–7 June 2018. [Google Scholar]
- Abazari, A.; Monsef, H.; Wu, B. Coordination strategies of distributed energy resources including FESS, DEG, FC and WTG in load frequency control (LFC) scheme of hybrid isolated microgrid. Int. J. Electr. Power Energy Syst. 2019, 109, 535–547. [Google Scholar] [CrossRef]
- Mishra, S.; Mallesham, G.; Jha, A.N. Design of controller and communication for frequency regulation of a smart microgrid. IET Renew. Power Gener. 2012, 6, 248–258. [Google Scholar] [CrossRef]
- Abdel-Hamed, A.M.; Ellissy, A.E.; El-Wakeel, A.S.; Abdelaziz, A.Y. Optimized control scheme for frequency/power regulation of microgrid for fault tolerant operation. Electr. Power Compon. Syst. 2016, 44, 1429–1440. [Google Scholar] [CrossRef]
- Alizadeh, G.A.; Rahimi, T.; Nozadian, M.H.B.; Padmanaban, S.; Leonowic, Z. Improving microgrid frequency regulation based on the virtual inertia concept while considering communication system delay. Energies 2019, 12, 2016. [Google Scholar] [CrossRef]
- Fini, M.H.; Golshan, M.E.H. Determining optimal virtual inertia and frequency control parameters to preserve the frequency stability in islanded microgrids with high penetration of renewables. Electr. Power Syst. Res. 2018, 154, 13–22. [Google Scholar] [CrossRef]
- Shahidehpour, M.; Li, Z.; Bahramirad, S.; Li, Z.; Tian, W. Networked microgrids: Exploring the possibilities of the IIT-Bronzeville grid. IEEE Power Energy Mag. 2017, 15, 63–71. [Google Scholar] [CrossRef]
- Toro, V.; Mojica-Nava, E. Droop free control for networked microgrids. In Proceedings of the 2016 IEEE Conference on Control Applications (CCA), Buenos Aires, Argentina, 19–22 September 2016. [Google Scholar]
- Panda, S.; Yegireddy, N.K. Automatic generation control of multi area power system using multi objective non dominated sorting genetic algorithm II. Int. J. Electr. Power Energy Syst. 2013, 53, 54–63. [Google Scholar] [CrossRef]
- Arya, Y. Automatic generation control of two area electrical power systems via optimal fuzzy classical controller. J. Frankl. Inst. 2018, 355, 2662–2688. [Google Scholar] [CrossRef]
- Medina, J.; Muller, N.; Roytelman, I. Demand response and distribution grid operations: Opportunities and challenges. IEEE Trans. Smart Grid 2010, 1, 193–198. [Google Scholar] [CrossRef]
- Aunedi, M.; Kountouriotis, P.A.; Calderon, J.E.O.; Angeli, D.; Strbac, G. Economic and environmental benefits of dynamic demand in providing frequency regulation. IEEE Trans. Smart Grid 2013, 4, 2036–2048. [Google Scholar] [CrossRef]
- Losi, A.; Mancarella, P.; Vicino, A. Integration of Demand Response into the Electricity Chain: Challenges, Opportunities, and Smart Grid Solutions; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Moghadam, M.R.V.; Ma, R.T.B.; Zhang, R. Distributed frequency control in smart grids via randomized demand response. IEEE Trans. Smart Grid 2014, 5, 2798–2809. [Google Scholar] [CrossRef]
- Rezaei, N.; Kalantar, M. Smart microgrid hierarchical frequency control ancillary service provision based on virtual inertia concept: An integrated demand response and droop controlled distributed generation framework. Energy Convers. Manag. 2015, 92, 287–301. [Google Scholar] [CrossRef]
- Rezaei, N.; Kalantar, M. Stochastic frequency security constrained energy and reserve management of an inverter interfaced islanded microgrid considering demand response programs. Int. J. Electr. Power Energy Syst. 2015, 69, 273–286. [Google Scholar] [CrossRef]
- Huang, H.; Li, F. Sensitivity analysis of load damping characteristic in power system frequency regulation. IEEE Trans. Power Syst. 2013, 28, 1324–1335. [Google Scholar] [CrossRef]
- Malik, A.; Ravishankar, J. A hybrid control approach for regulating frequency through demand response. Appl. Energy 2018, 210, 1347–1362. [Google Scholar] [CrossRef]
- Soares, J.; Ghazvini, M.A.F.; Borges, N.; Vale, Z. A stochastic model for energy resources management considering demand response in smart grids. Electr. Power Syst. Res. 2017, 143, 599–610. [Google Scholar] [CrossRef]
- Chang-Chien, L.R.; An, L.N.; Lin, T.W.; Lee, W.J. Incorporating demand response with spinning reserve to realize an adaptive frequency restoration plan for system contingencies. IEEE Trans. Smart Grid 2012, 3, 1145–1153. [Google Scholar] [CrossRef]
- Zhao, C.; Topcu, U.; Low, S.H. Optimal load control via frequency measurement and neighborhood area communication. IEEE Trans. Power Syst. 2013, 28, 3576–3587. [Google Scholar] [CrossRef]
- Ford, J.J.; Bevrani, H.; Ledwich, G. Adaptive load shedding and regional protection. Int. J. Electr. Power Energy Syst. 2009, 31, 611–618. [Google Scholar] [CrossRef]
- Bayat, M.; Sheshyekani, K.; Hamzeh, M.; Rezazadeh, A. Coordination of distributed energy resources and demand response for voltage and frequency support of MV microgrids. IEEE Trans. Power Syst. 2016, 31, 1506–1516. [Google Scholar] [CrossRef]
- Gao, W.; Ning, J. Wavelet based disturbance analysis for power system wide area monitoring. IEEE Trans. Smart Grid 2011, 2, 121–130. [Google Scholar] [CrossRef]
- Babahajiani, P.; Shafiee, Q.; Bevrani, H. Intelligent demand response contribution in frequency control of multi area power systems. IEEE Trans. Smart Grid 2016, 9, 1282–1291. [Google Scholar] [CrossRef]
- Bevrani, H.; Habibi, F.; Babahajyani, P.; Watanabe, M.; Mitani, Y. Intelligent frequency control in an AC microgrid: Online PSO based fuzzy tuning approach. IEEE Trans. Smart Grid 2012, 3, 1935–1944. [Google Scholar] [CrossRef]
- Ortega, A.; Milano, F. Generalized model of VSC based energy storage systems for transient stability analysis. IEEE Trans. Power Syst. 2016, 31, 3369–3380. [Google Scholar] [CrossRef]
- Nikmehr, N.; Ravadanegh, S.N. Optimal power dispatch of multi microgrids at future smart distribution grids. IEEE Trans. Smart Grid 2015, 6, 1648–1657. [Google Scholar] [CrossRef]
- Nikmehr, N.; Ravadanegh, S.N. Heuristic probabilistic power flow algorithm for microgrids operation and planning. IET Gener. Transm. Distrib. 2015, 9, 985–995. [Google Scholar] [CrossRef]
- Nikmehr, N.; Ravadanegh, S.N. Optimal operation of distributed generations in microgrids under uncertainties in load and renewable power generation using heuristic algorithm. IET Renew. Power Gener. 2015, 9, 982–990. [Google Scholar] [CrossRef]
- Hemmati, R. Technical and economic analysis of home energy management system incorporating small scale wind turbine and battery energy storage system. J. Clean. Prod. 2017, 159, 106–118. [Google Scholar] [CrossRef]
- Salehi, J.; Abdolahi, A. Optimal scheduling of active distribution networks with penetration of PHEV considering congestion and air pollution using DR program. Sustain. Cities Soc. 2019, 51, 1–15. [Google Scholar] [CrossRef]
- Nikmehr, N.; Ravadanegh, S.N. Stochastic risk and reliability assessments of energy management system in grid of microgrids under uncertainty. J. Power Technol. 2017, 97, 179–189. [Google Scholar]
- U.S. Energy Information Administration: Annual Energy Review. Available online: http://www.eia.gov/totalenergy/data/annual/#consumption (accessed on 16 April 2020).
- Bao, Y.-Q.; Li, Y. FPGA based design of grid friendly appliance controller. IEEE Trans. Smart Grid 2014, 5, 924–931. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|---|---|
| β1 (p.u./Hz) Tg1 (s) TSMESS (s) F1 | 10 0.05 0.3 1 | D1 (p.u./Hz) Tt1 (s) TF1 (s) F2 | 1 0.5 0.1 0.5 | M1 (p.u. s/Hz) RDEG1 (Hz/p.u.) TF2 (s) PFESS | 3 0.05 0.1 4 | TWTG (s) KSMESS TF3 (s) JFESS | 0.04 0.98 0.01 2 |
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|---|---|
| β2 (p.u./HZ) Tt2 (s) HVirtual | 10 0.4 0.139 | D2 (p.u./Hz) RDEG2 (Hz/p.u.) TUC (s) | 0.012 0.5682 0.2 | M2 (p.u. s/Hz) TBESS2 (s) | 0.298 0.1 | Tg2 (s) RBESS2 (Hz/p.u.) | 0.18 0.705 |
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|---|---|
| β3 (p.u./HZ) Tg3 (s) TFC2 (s) | 10 0.08 0.04 | D3 (p.u./Hz) Tt3 (s) TBESS3 (s) | 0.015 0.4 0.08 | M3 (p.u. s/Hz) RDEG3 (Hz/p.u.) RBESS3 (Hz/p.u.) | 0.1667 3 3 | TPV (s) TFC1 (s) | 0.04 0.026 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| Kp11 Kp12 Ki11 Ki12 Kd11 Kd12 | −0.0083 −1.972 −4.9991 −4.996 −4.1601 −2.6442 | Kp21 Kp22 Ki21 Ki22 Kd21 Kd22 | −2.0719 −0.1249 −3.605 −0.15 −1.7581 −0.5424 | Kp31 Kp32 Ki31 Ki32 Kd31 Kd32 | −4.09 −4.09 −2.1081 −2.1081 −1 −1 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| Kp11 Kp12 Ki11 Ki12 Kd11 Kd12 | −0.042 −3.9327 −7.9876 −7.8101 −4.815 −3.1939 | Kp21 Kp22 Ki21 Ki22 Kd21 Kd22 | −4.8144 −3.2097 −4.8601 −1.8405 −2.9884 −0.8321 | Kp31 Kp32 Ki31 Ki32 Kd31 Kd32 | −5.6655 −5.6655 −3.4699 −3.4699 −2.951 −2.951 |
| Parameter | Value |
|---|---|
| Number of iterations or decades Number of initial countries Number of imperialist countries Number of colonies | 50 17 5 12 |
| Parameter | Limitation | Parameter | Limitation | Parameter | Limitation |
|---|---|---|---|---|---|
| Kp11 Kp12 Ki11 Ki12 Kd11 Kd12 | −0.1 to −0.05 −5 to −1 −10 to −2 −10 to −1 −10 to −2 −5 to −1 | Kp21 Kp22 Ki21 Ki22 Kd21 Kd22 | −5 to −1 −5 to −0.5 −5 to −1 −2 to −0.05 −5 to −0.5 −2 to −0.1 | Kp31 Kp32 Ki31 Ki32 Kd31 Kd32 | −10 to −1 −10 to −1 −5 to −1 −5 to −1 −5 to −0.1 −5 to −0.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rostami, Z.; Ravadanegh, S.N.; Kalantari, N.T.; Guerrero, J.M.; Vasquez, J.C. Dynamic Modeling of Multiple Microgrid Clusters Using Regional Demand Response Programs. Energies 2020, 13, 4050. https://doi.org/10.3390/en13164050
Rostami Z, Ravadanegh SN, Kalantari NT, Guerrero JM, Vasquez JC. Dynamic Modeling of Multiple Microgrid Clusters Using Regional Demand Response Programs. Energies. 2020; 13(16):4050. https://doi.org/10.3390/en13164050
Chicago/Turabian StyleRostami, Ziba, Sajad Najafi Ravadanegh, Navid Taghizadegan Kalantari, Josep M. Guerrero, and Juan C. Vasquez. 2020. "Dynamic Modeling of Multiple Microgrid Clusters Using Regional Demand Response Programs" Energies 13, no. 16: 4050. https://doi.org/10.3390/en13164050
APA StyleRostami, Z., Ravadanegh, S. N., Kalantari, N. T., Guerrero, J. M., & Vasquez, J. C. (2020). Dynamic Modeling of Multiple Microgrid Clusters Using Regional Demand Response Programs. Energies, 13(16), 4050. https://doi.org/10.3390/en13164050