End-Point Model for Optimization of Multilateral Well Placement in Hydrocarbon Field Developments



Abstract
1. Introduction
1.1. Multilateral Wells as an Asset in Reservoir Management
1.2. State-Of-The-Art in Multilateral Well Placement Optimization
1.3. Genetic Algorithm and Particle Swarm Optimization Procedure
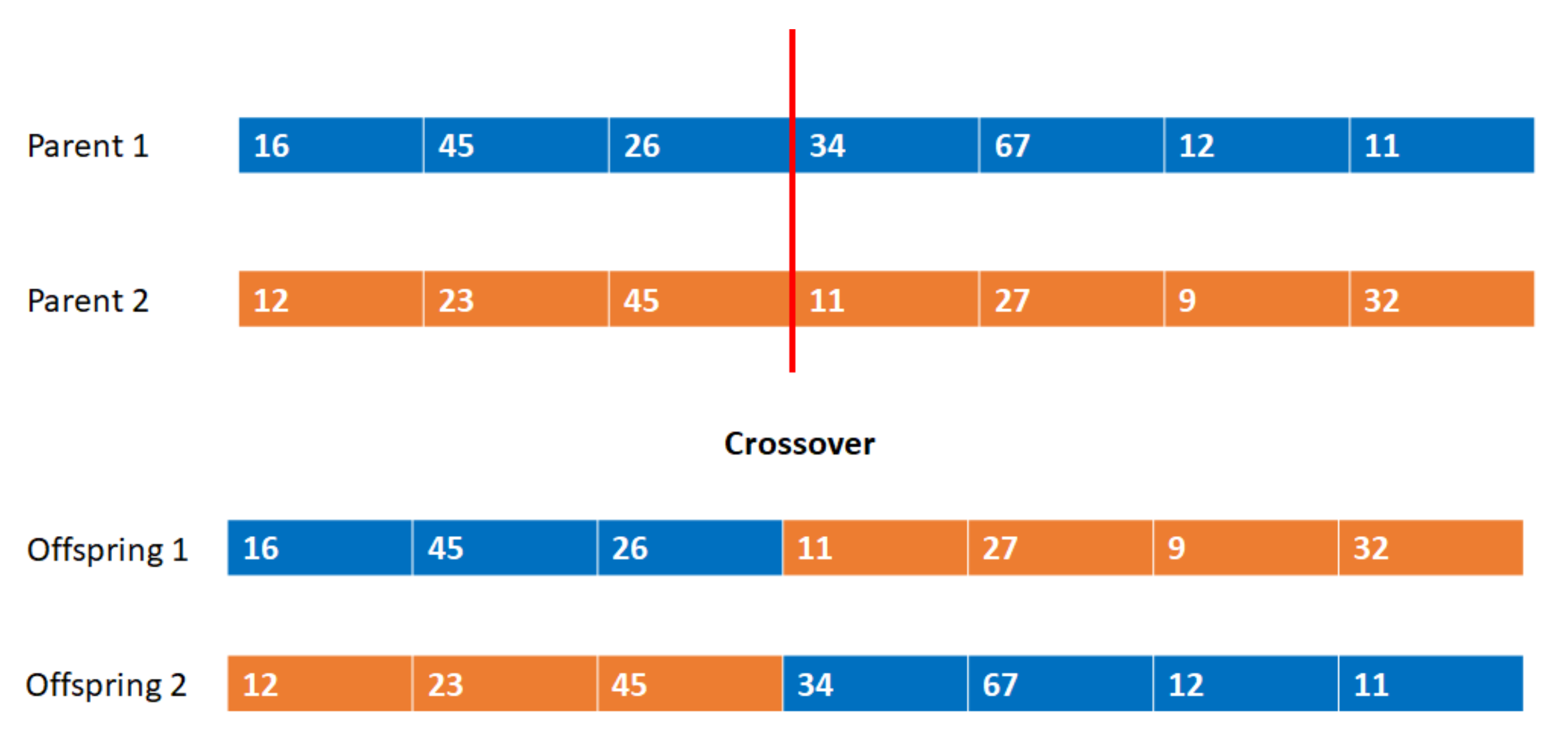
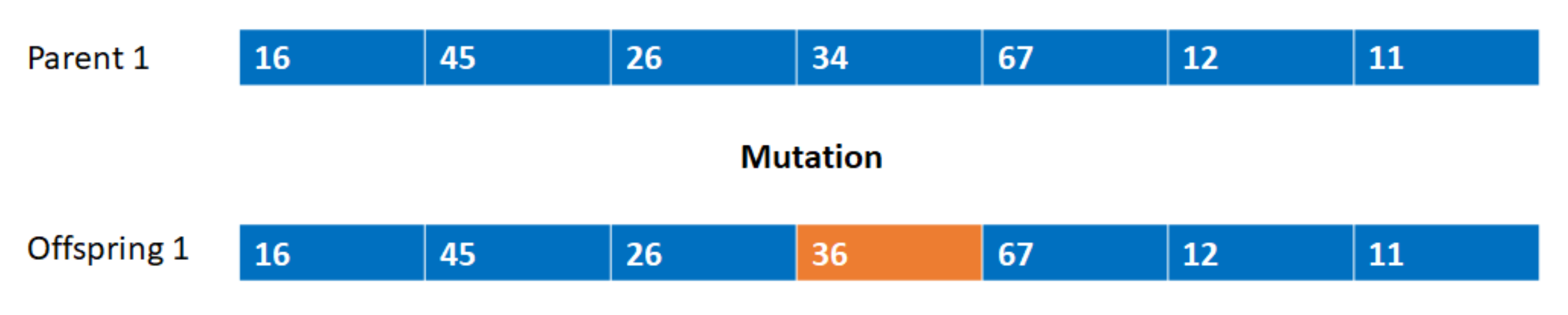
1.3.1. Genetic Algorithm
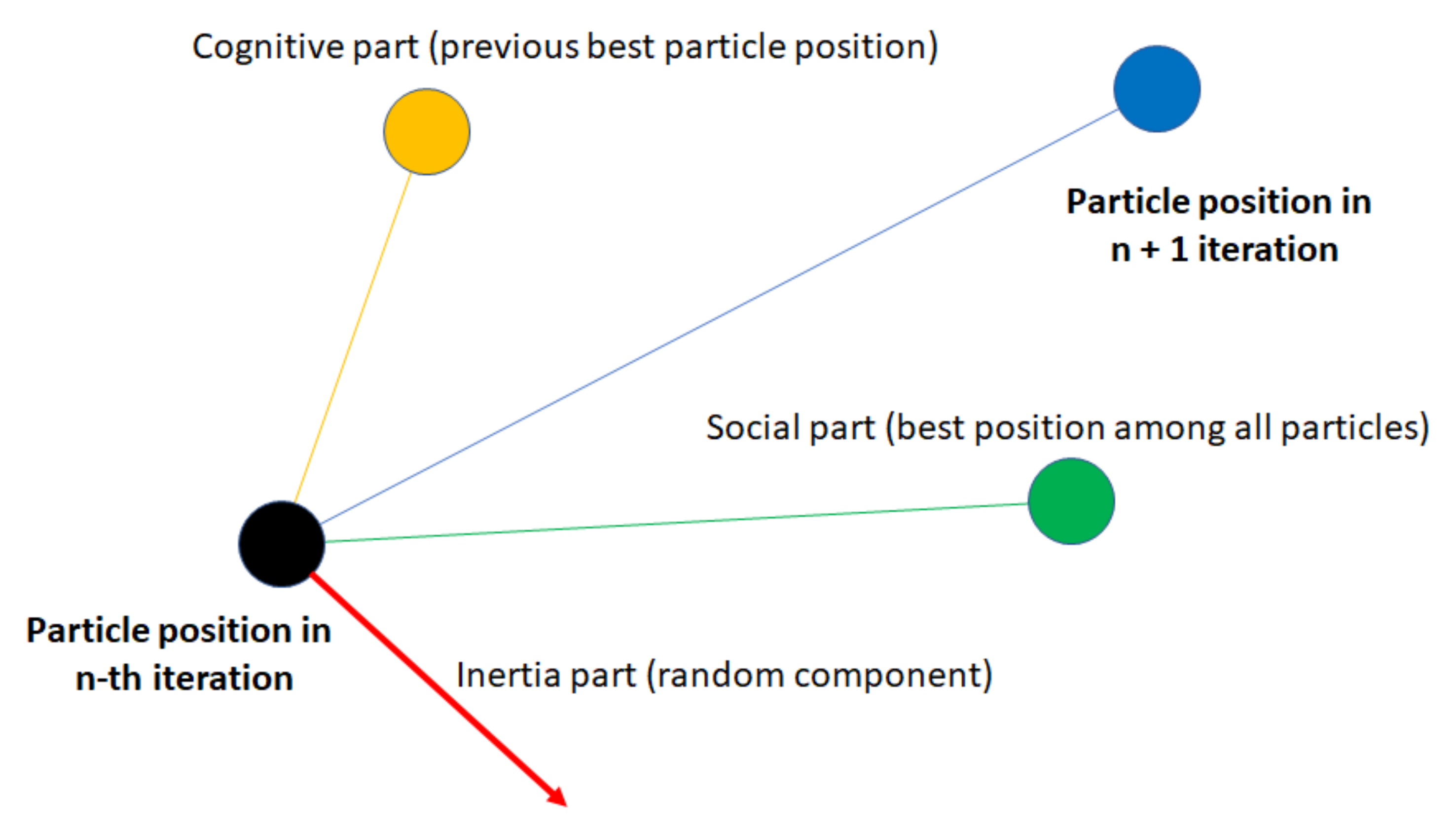
1.3.2. Particle Swarm Optimization
1.4. The Article’s Objective
2. Methodology
2.1. End-Point Multilateral Well Model
2.1.1. Workflow
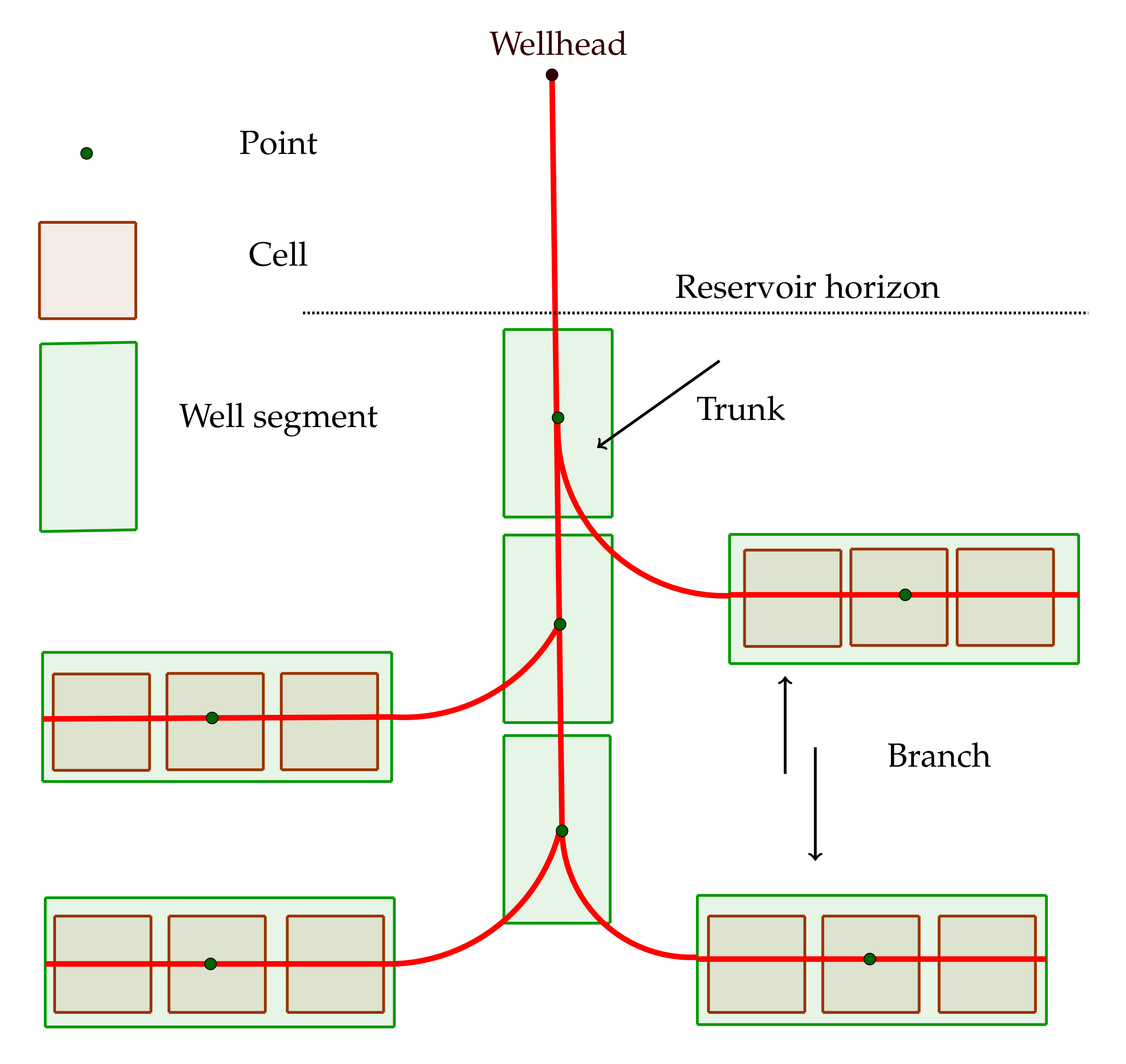
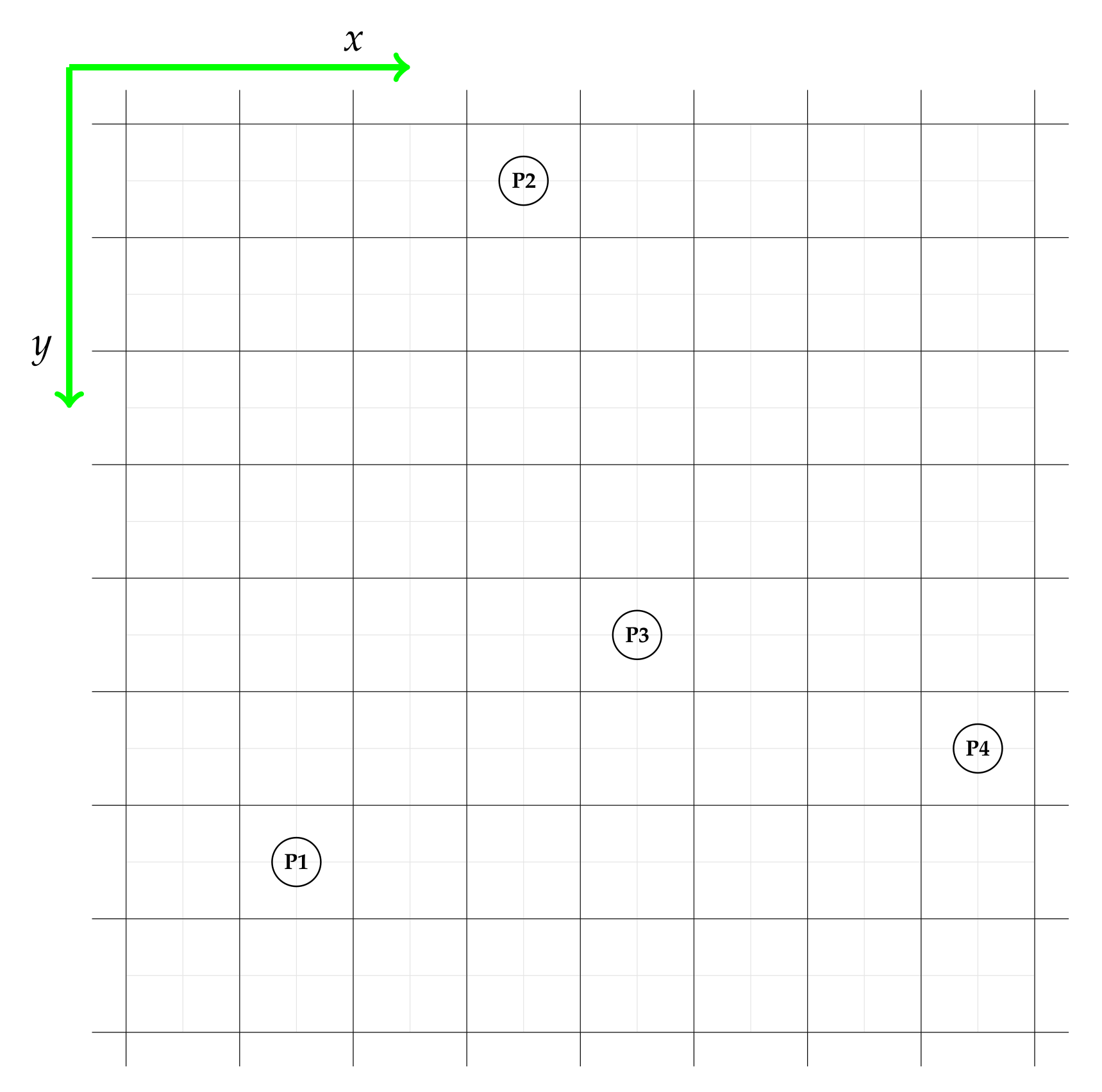
- Create end-point well set by picking points (where ) from the reservoir domain , where numbers of total end-points are determined (Figure 6):
- Due to the well construction assumption, the total number of lateral wells (branches) is equal to , meaning that for a horizontal well (one branch), is required; for a bi-lateral well, is mandatory, etc.;
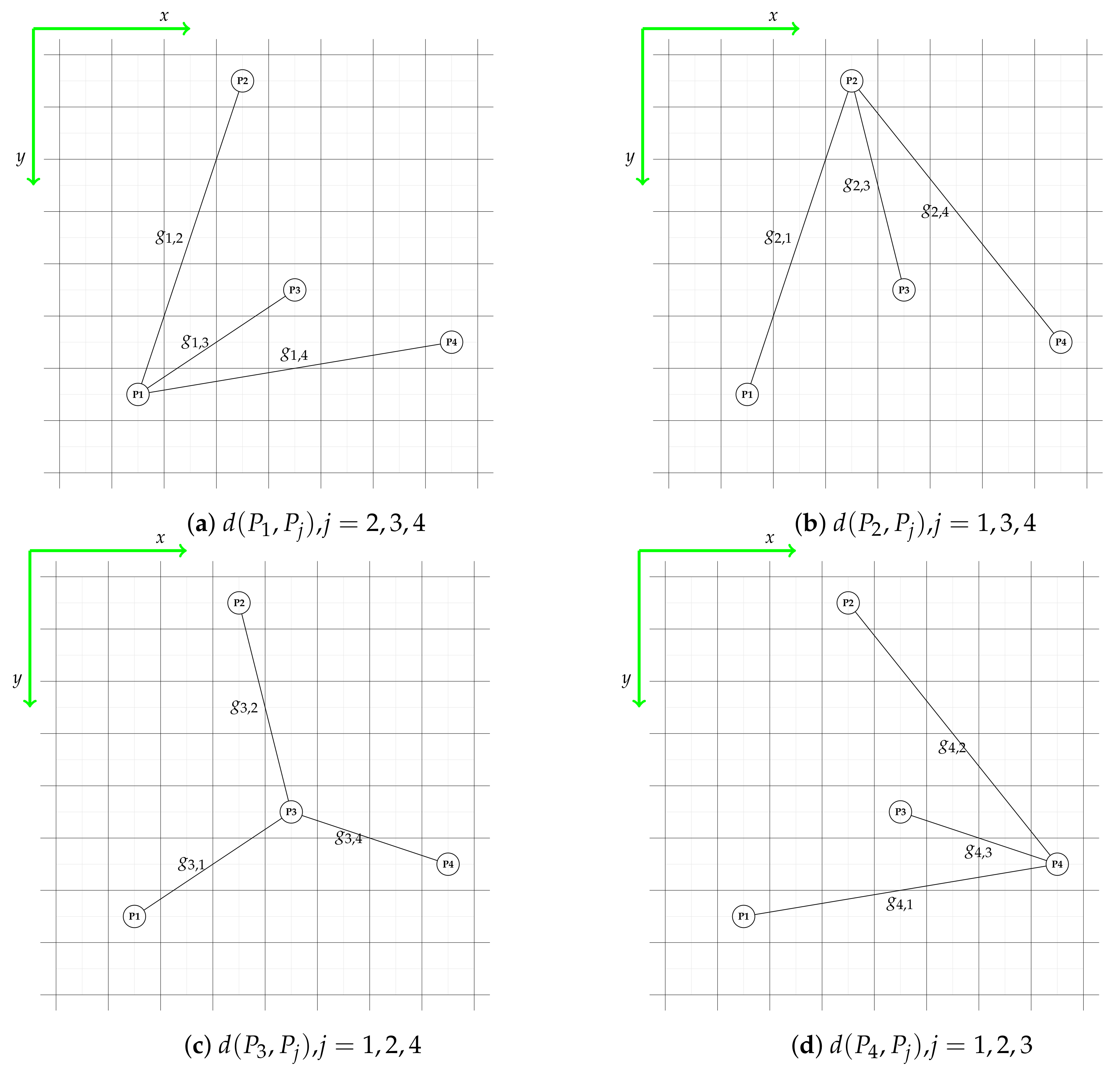
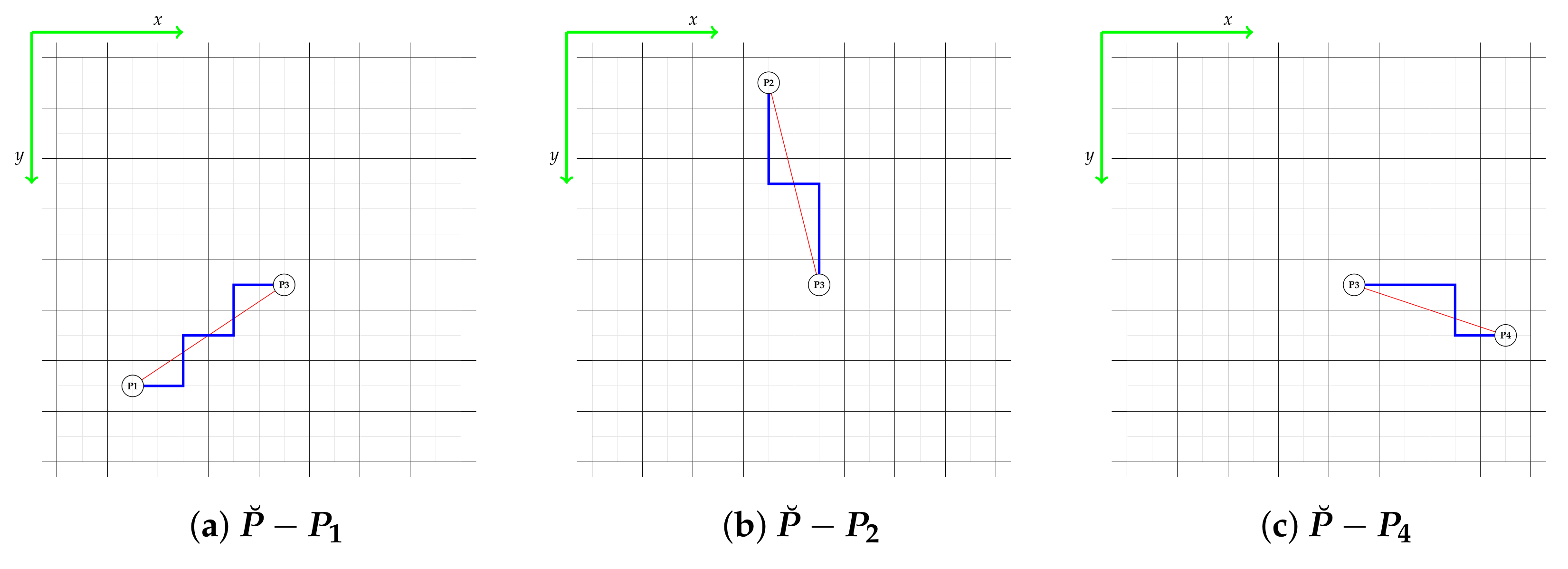
- Individual branch is represented by the section connected at the junction point: ; thus, we elaborate all possible connections between points in the set (Figure 7 represents the connection possibilities depending on the central point);
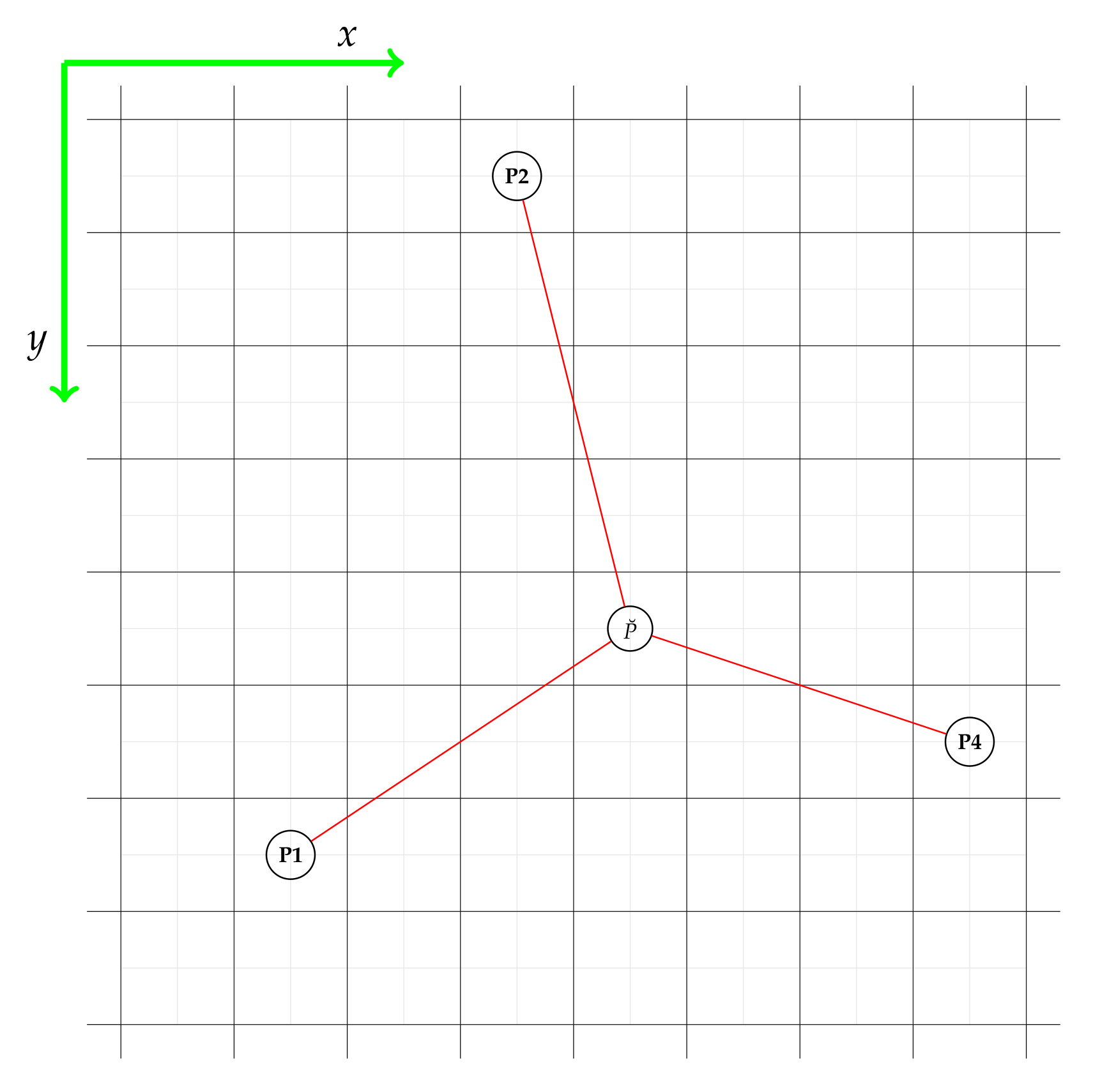
- The end-point well optimization algorithm focuses on minimizing the total branches’ lengths . In other words, we want to find such a point-to-point connection pattern that minimizes the sum of the branches’ lengths. In this manner, the central point has to determine ;
- In end-point well set , get the central point (well trunk) fulfilling the following assumption of the minimizing total branch length:where the distance between each point in the set is calculated by the following equation:and argmin is a function returning the index of the point:
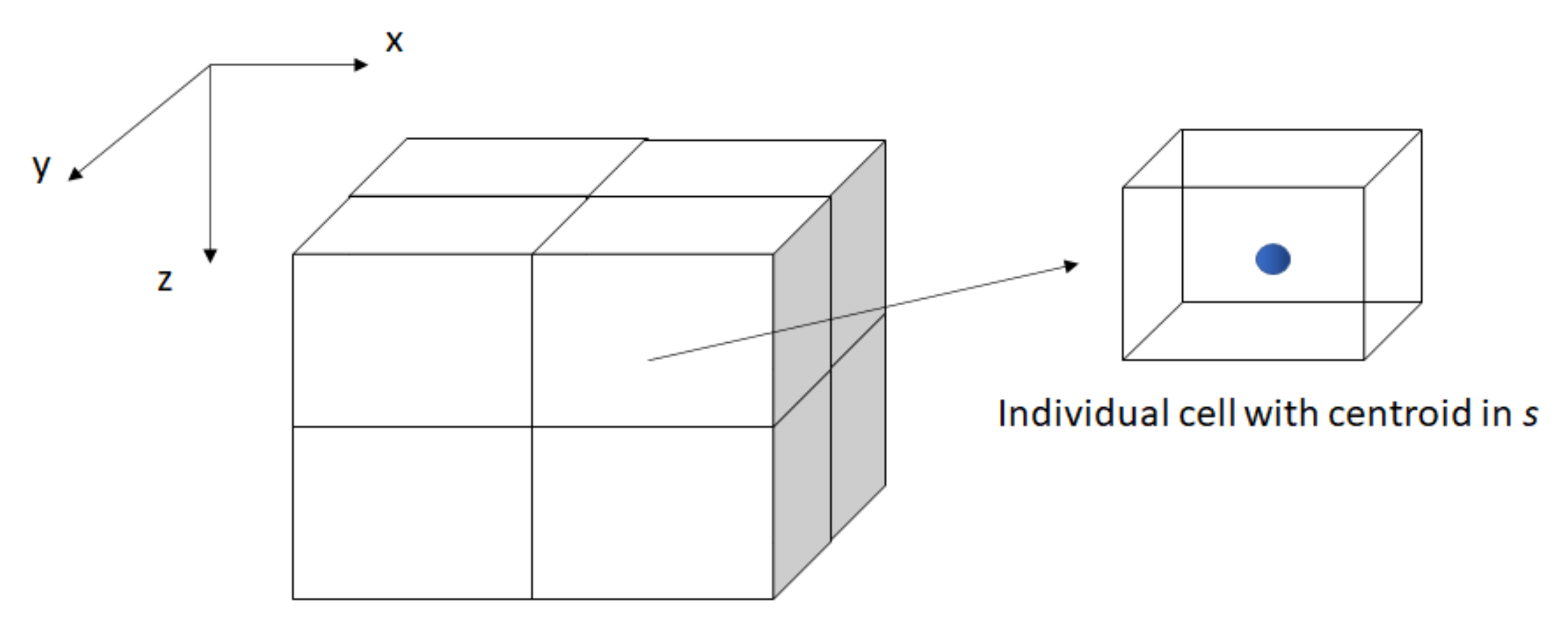
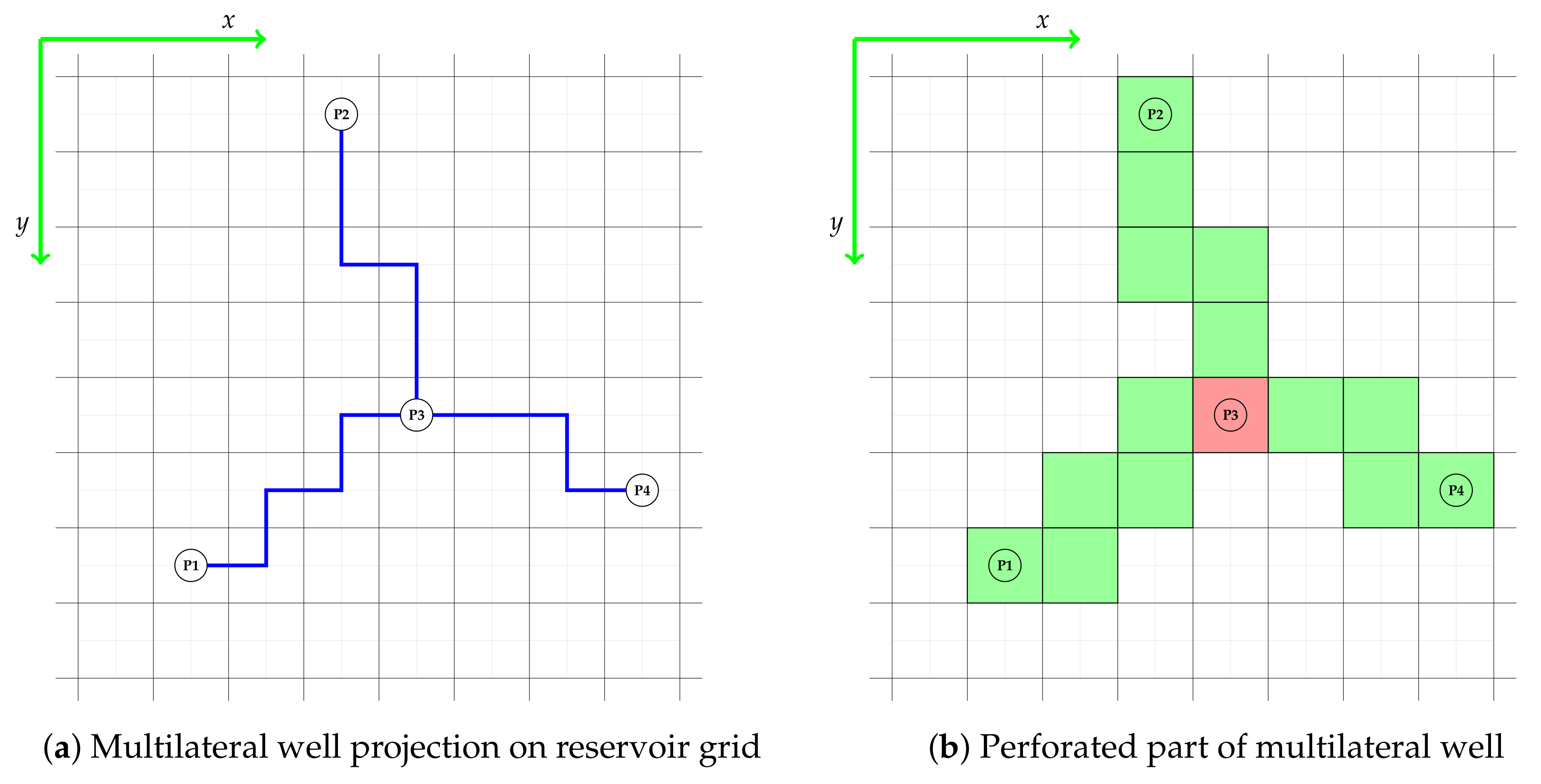
- The reservoir simulation used in this study (Schlumberger Eclipse, version: 2019a Manufacturer: Schlumberger) requires discrete approximation of the well trajectory; thus, the trajectory of the well must be approximated to a center point block of the simulation grid. Branch matrix contains the well trajectory:
- The common part of individual trajectories can be written as a set of points with coordinates , which belong to both the side branch and branch :
- The analysis of the mutual part of the lateral well trajectory allows determining which cells should be treated as open (perforated) according to the algorithm, because multiple connections in the same cell are forbidden:
- Cells marked with the index are treated as open, while those with index are closed for the well. The following assumptions allow avoiding sharing the same block by different side wells.
- The perforation matrix is translated to the simulator keyword and is included in the simulation run.
2.1.2. Implementation Example
2.2. Optimization of Multilateral Well Placement
2.2.1. Objective Function
| r | – oil and gas price per volume unit ($/m), |
| – total production (m/s), | |
| – production OPEX ($/m), | |
| – well drilling cost ($), | |
| – production CAPEX ($/s), | |
| – oil, gas, and water |
| – factors for CAPEX calculations, a ($/m),b (-), c ($), | |
| d | – branch length g (m), |
| – trunk drilling cost ($) | |
| – number of production wells, |
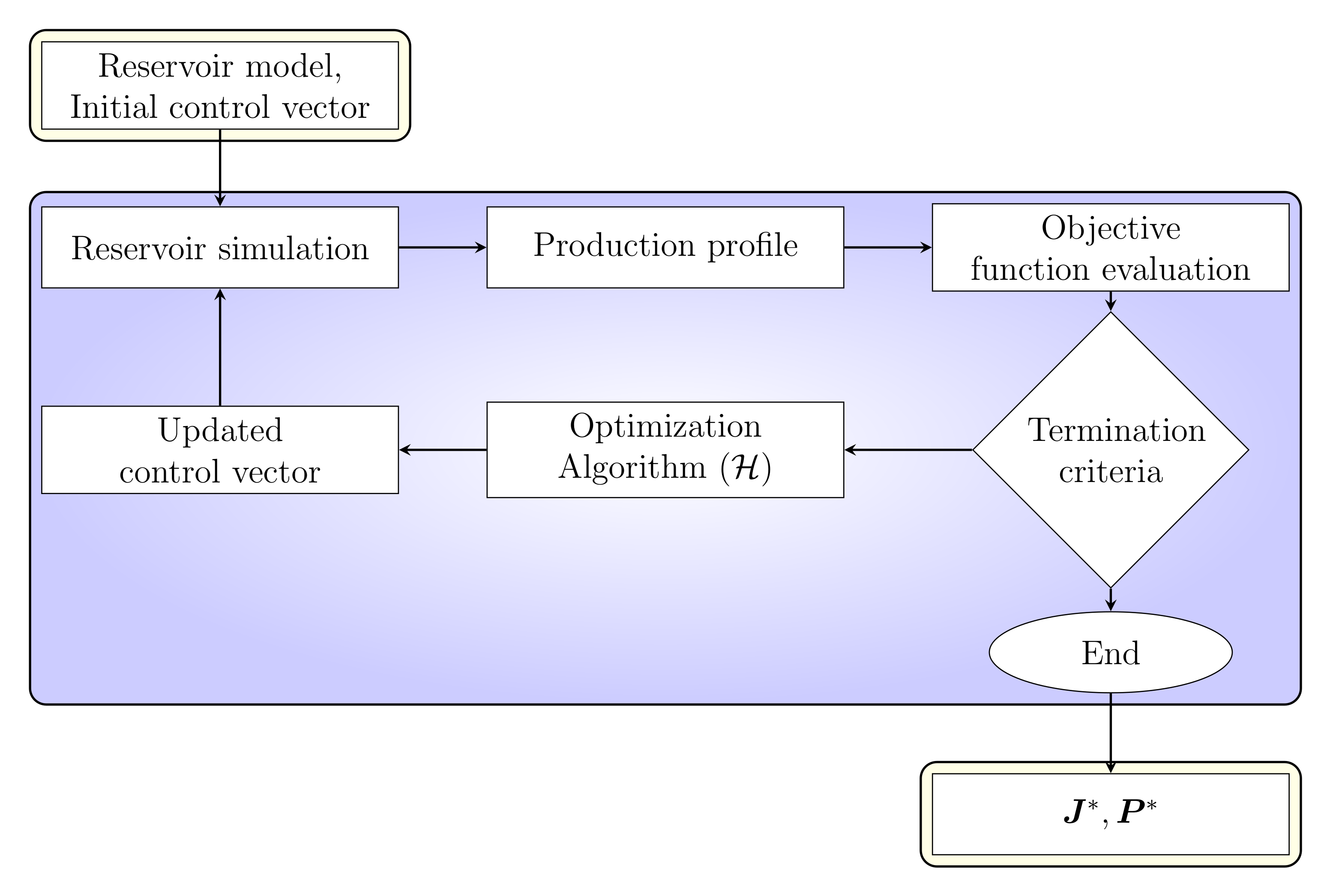
2.2.2. Optimization Algorithm
3. Case Study
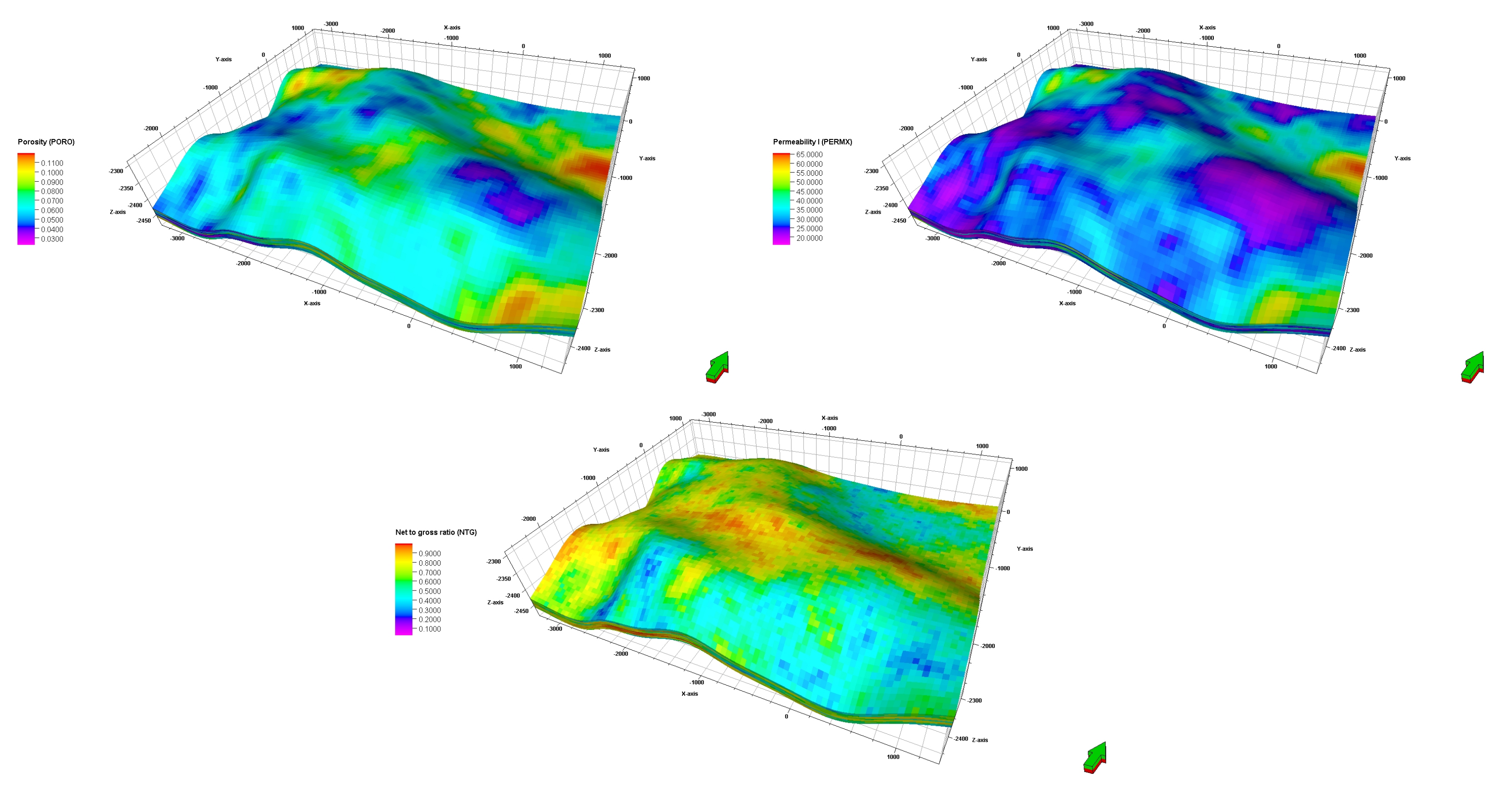
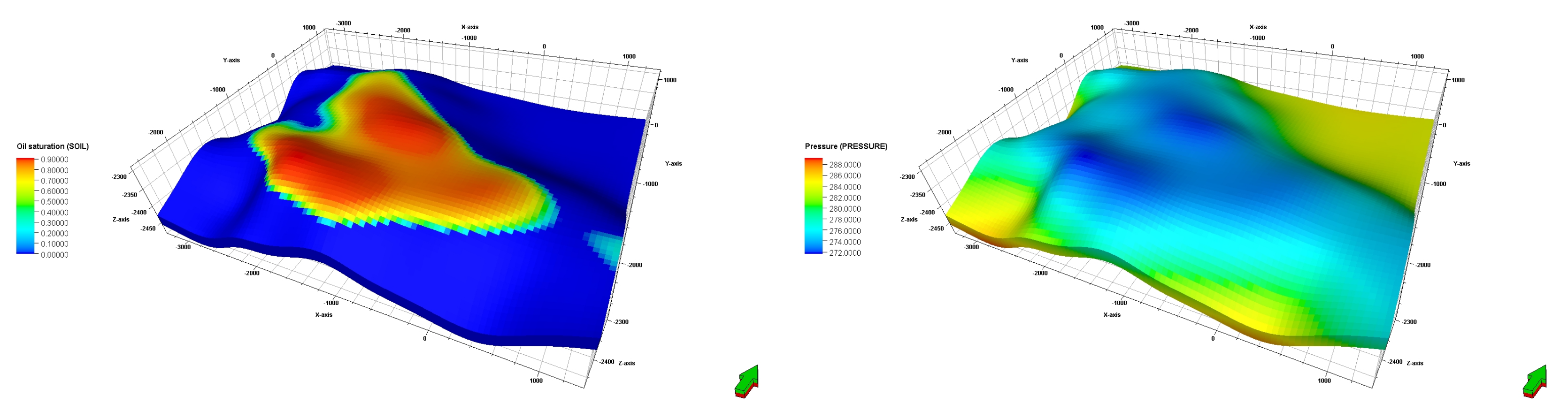
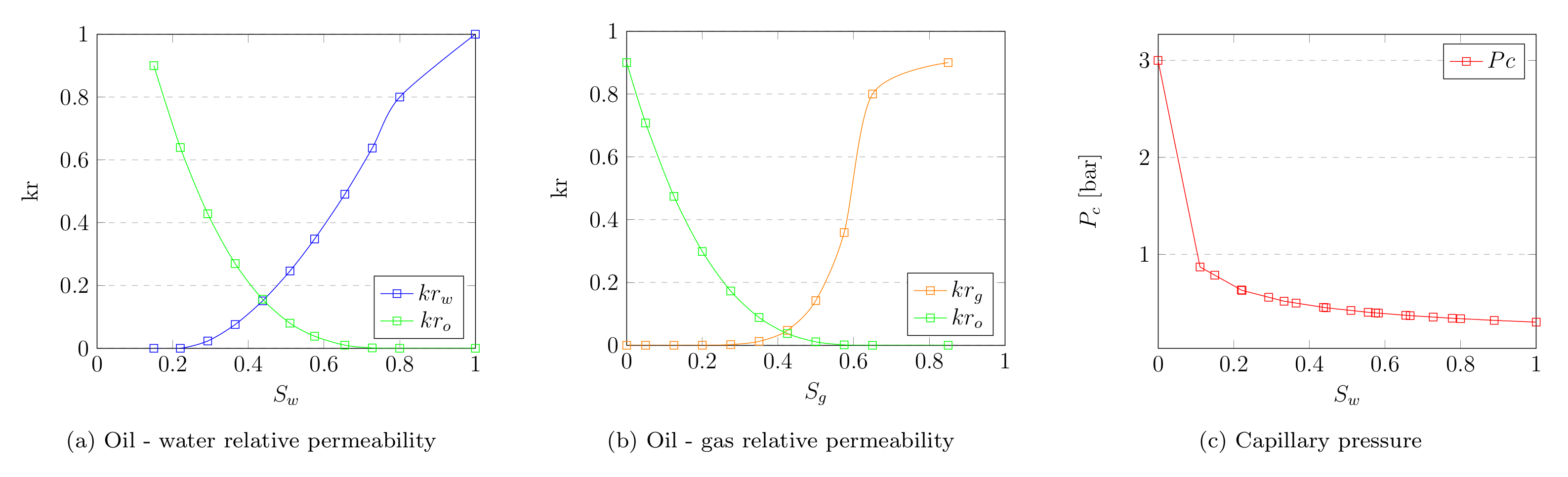
3.1. Reservoir Simulation Model
3.2. Optimization Assumptions
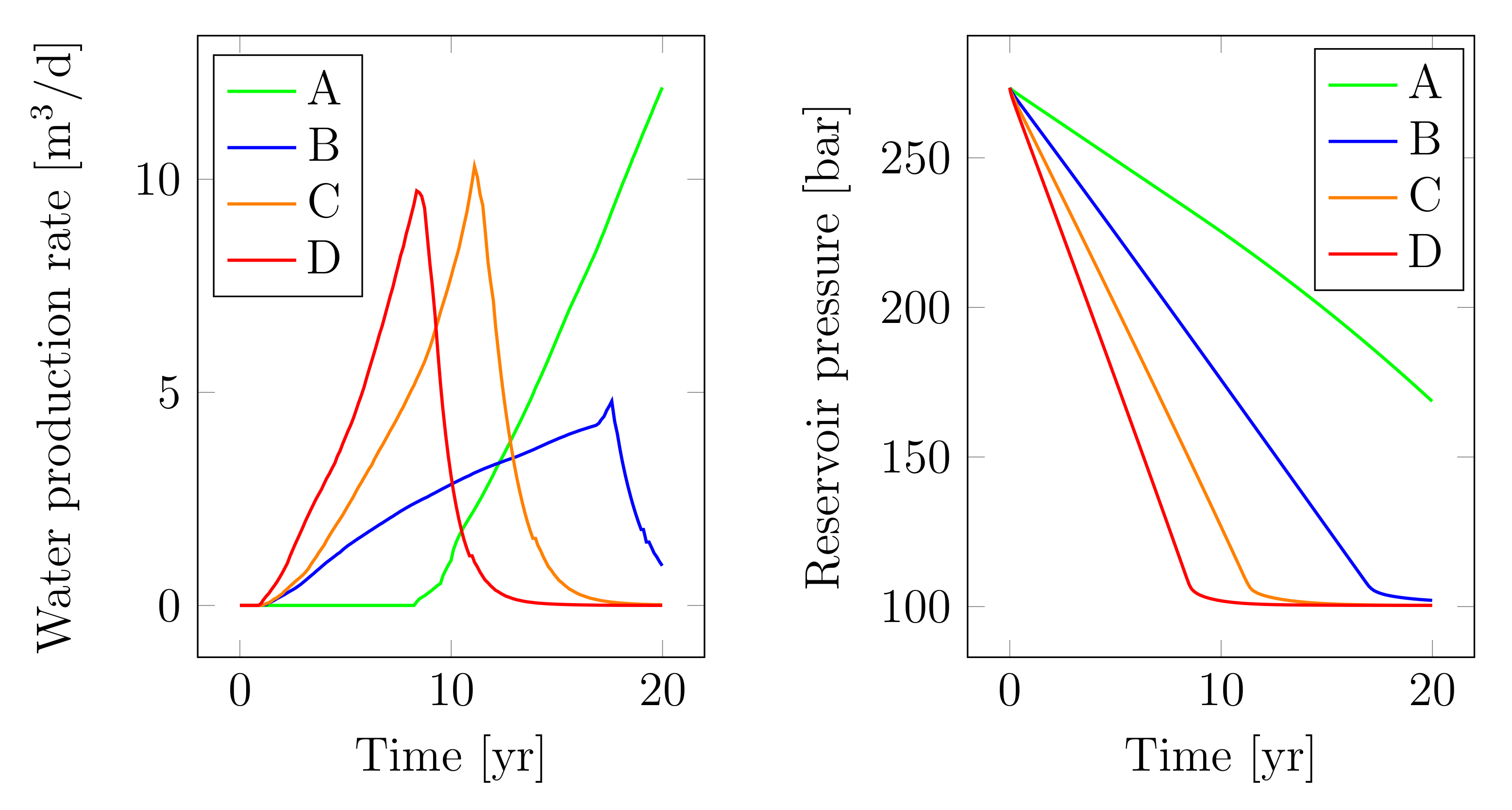
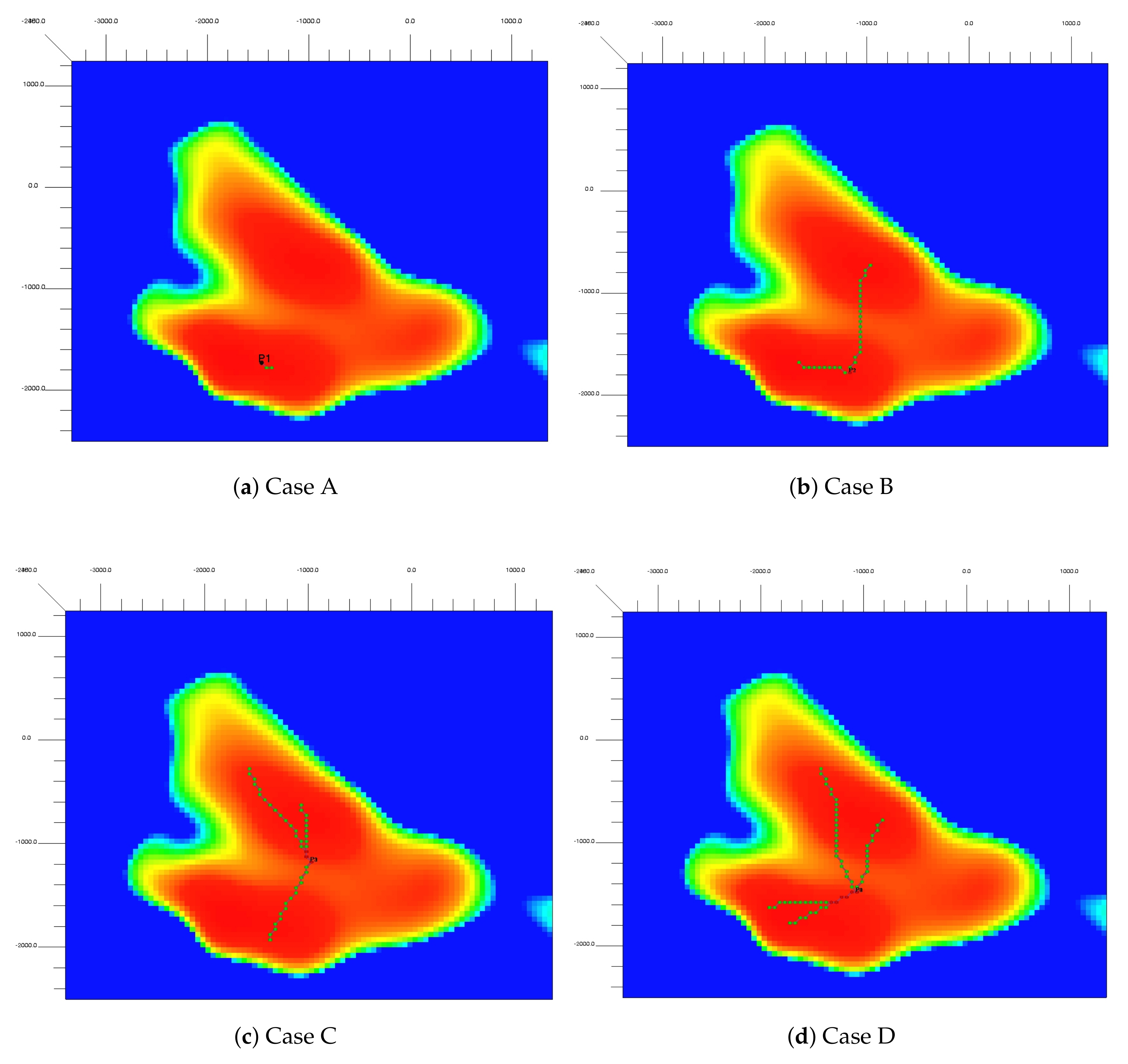
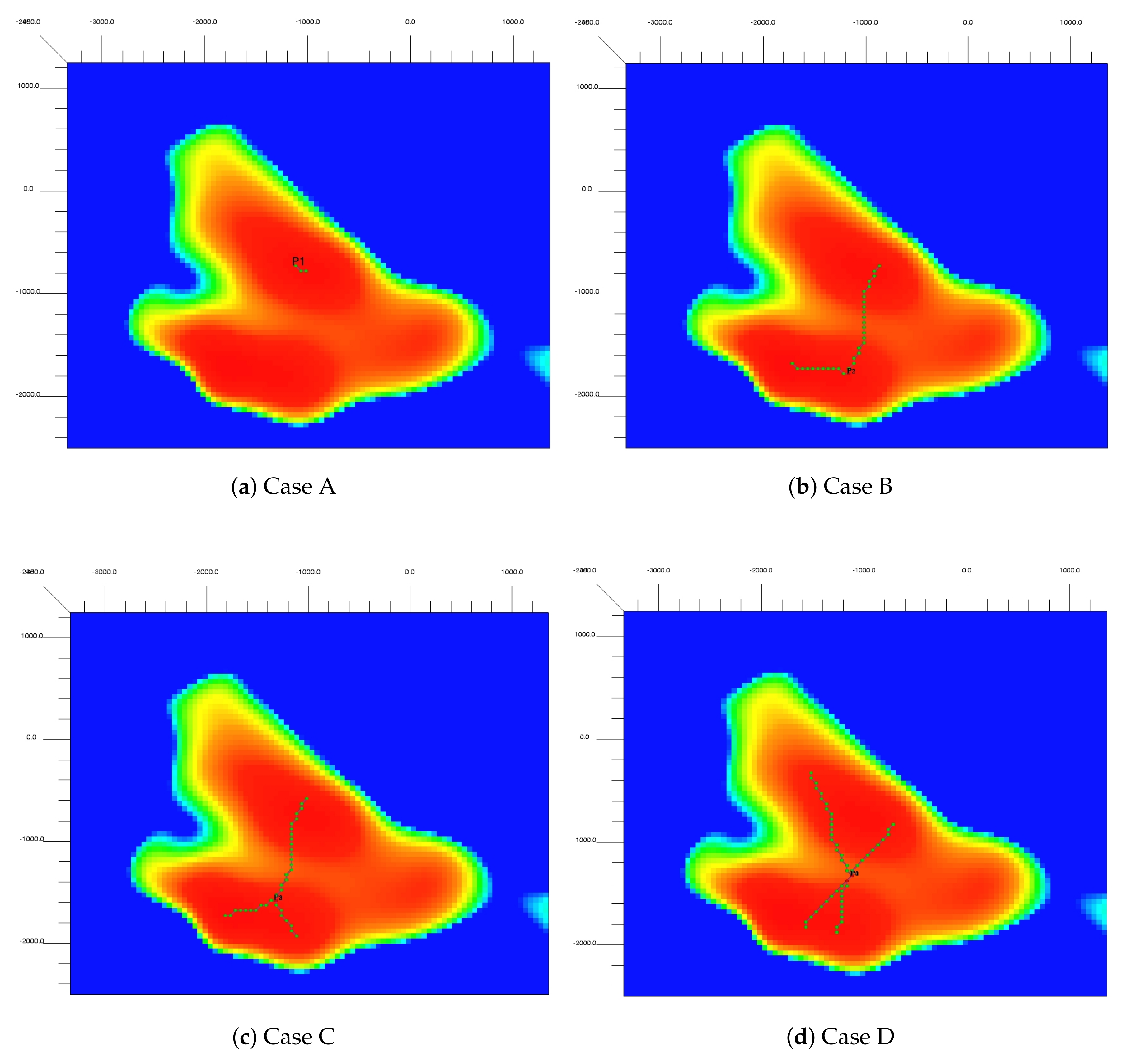
- Case A: horizontal well— = 2 nodal points,
- Case B: bilateral well— = 3 nodal points,
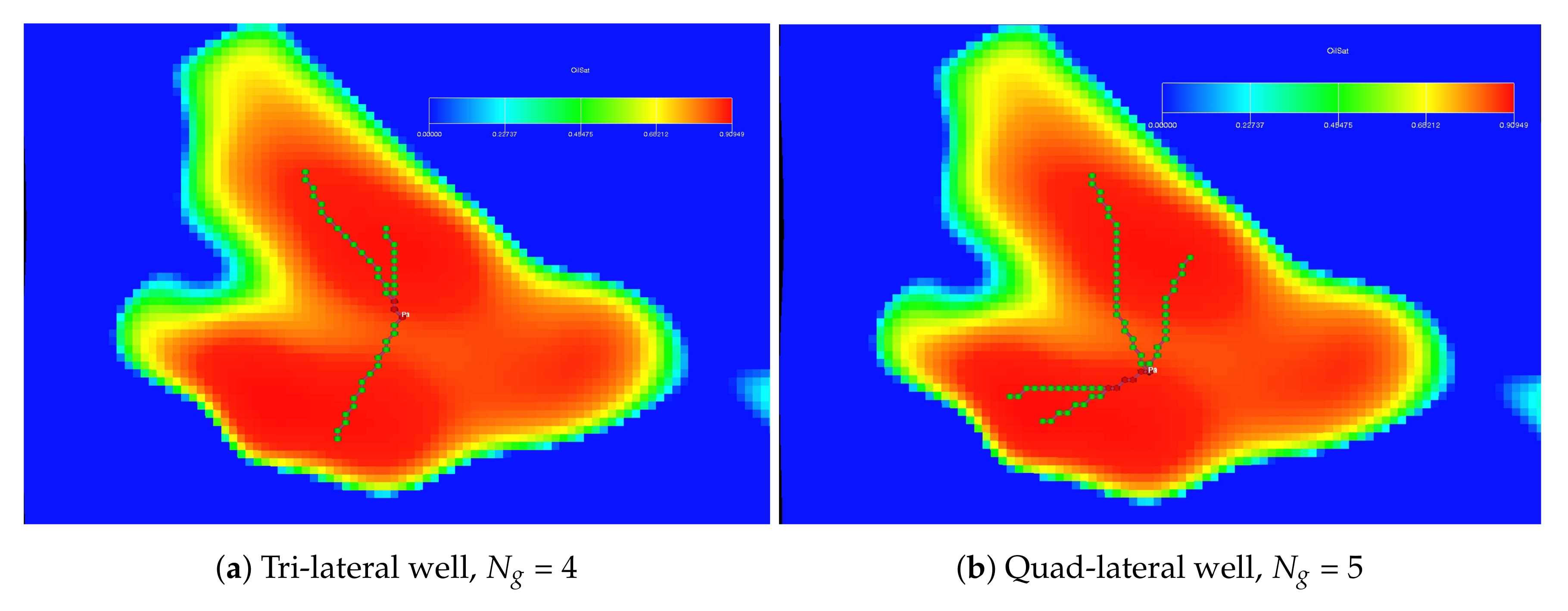
- Case C: trilateral well— = 4 nodal points,
- Case D: quad-lateral well— = 5 nodal points.
4. Results and Discussion
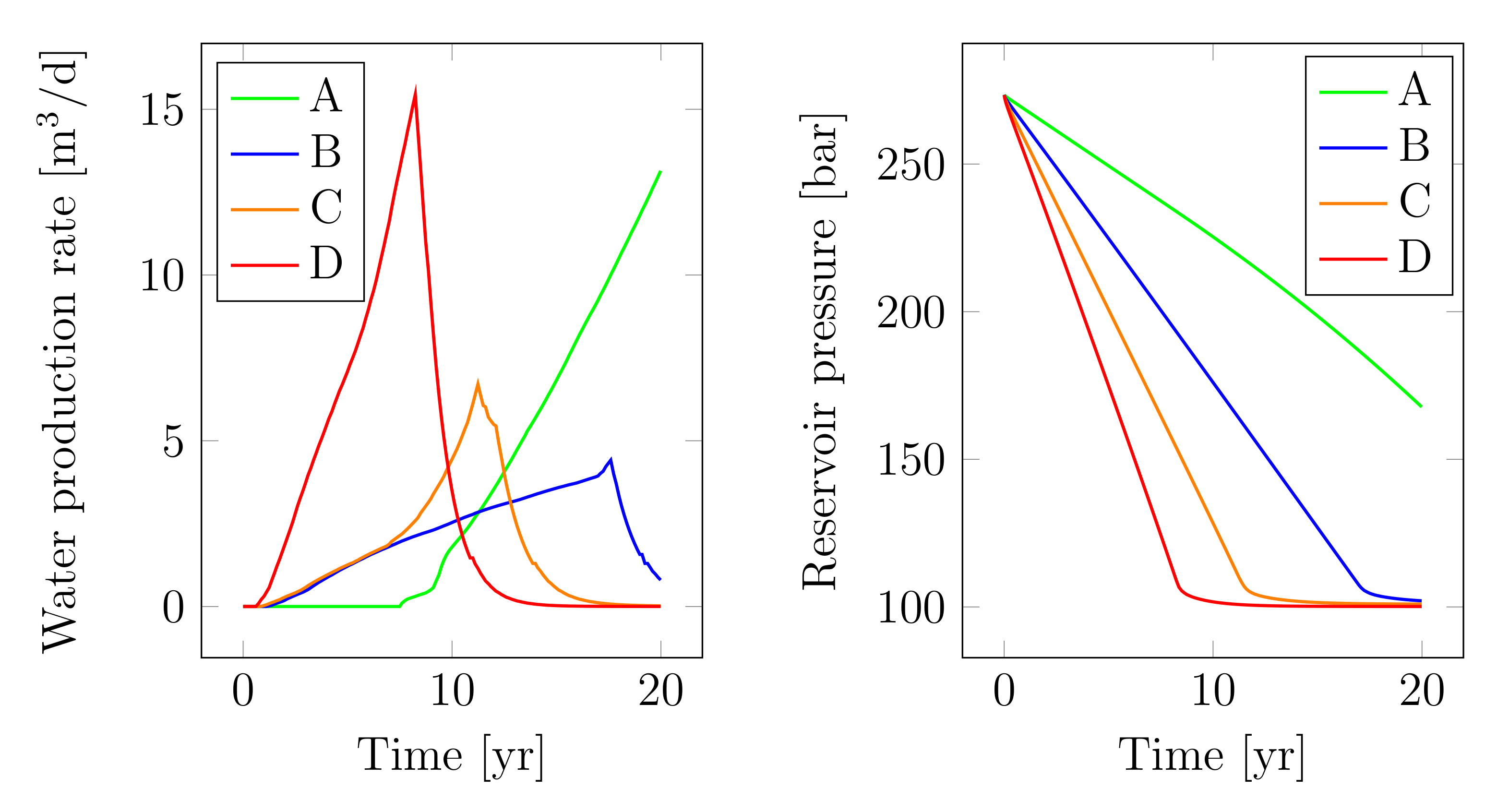
4.1. Reservoir Production Performance and Optimization Results
4.2. Results of Multilateral Well Placement in the 3D Spatial Domain
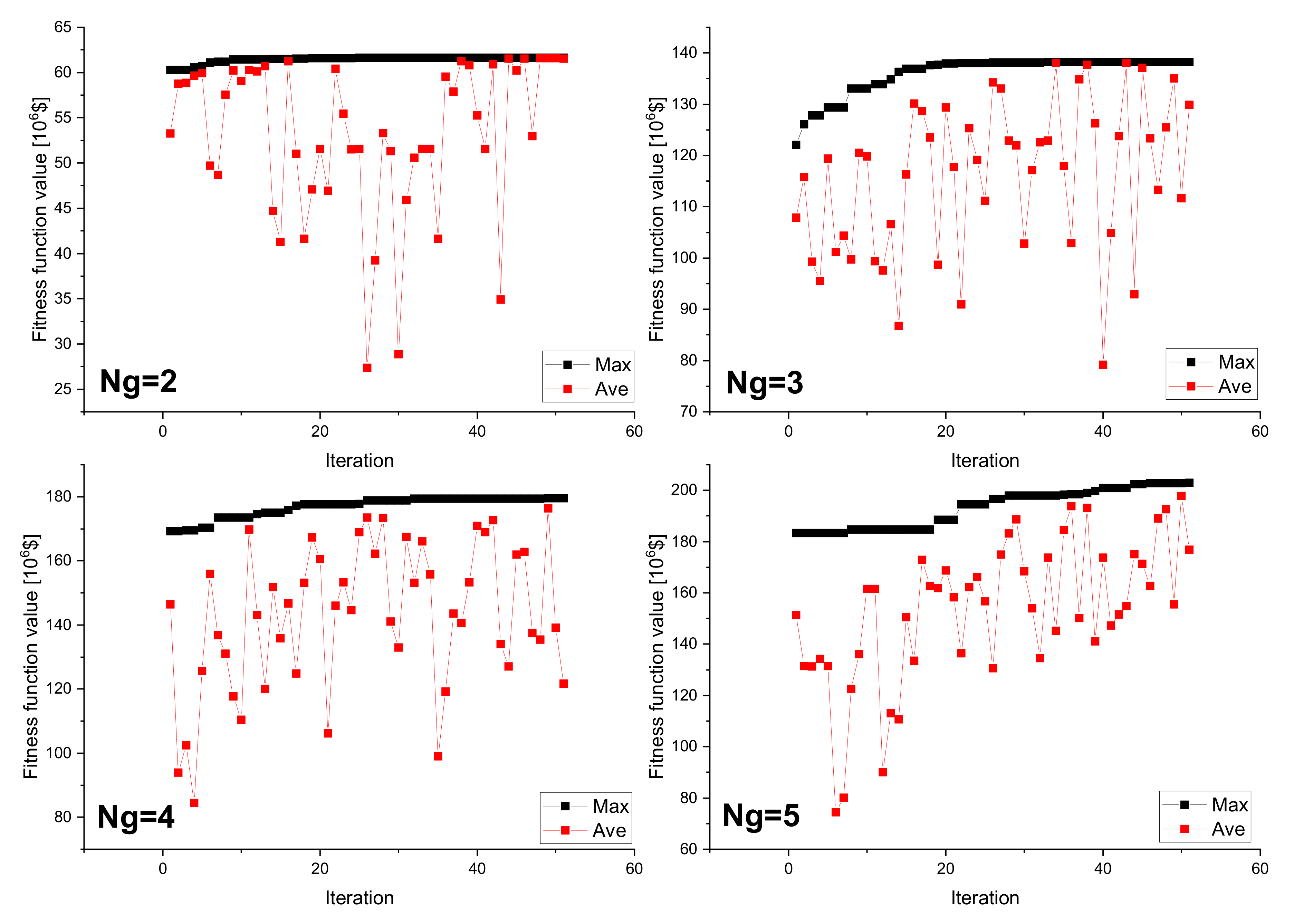
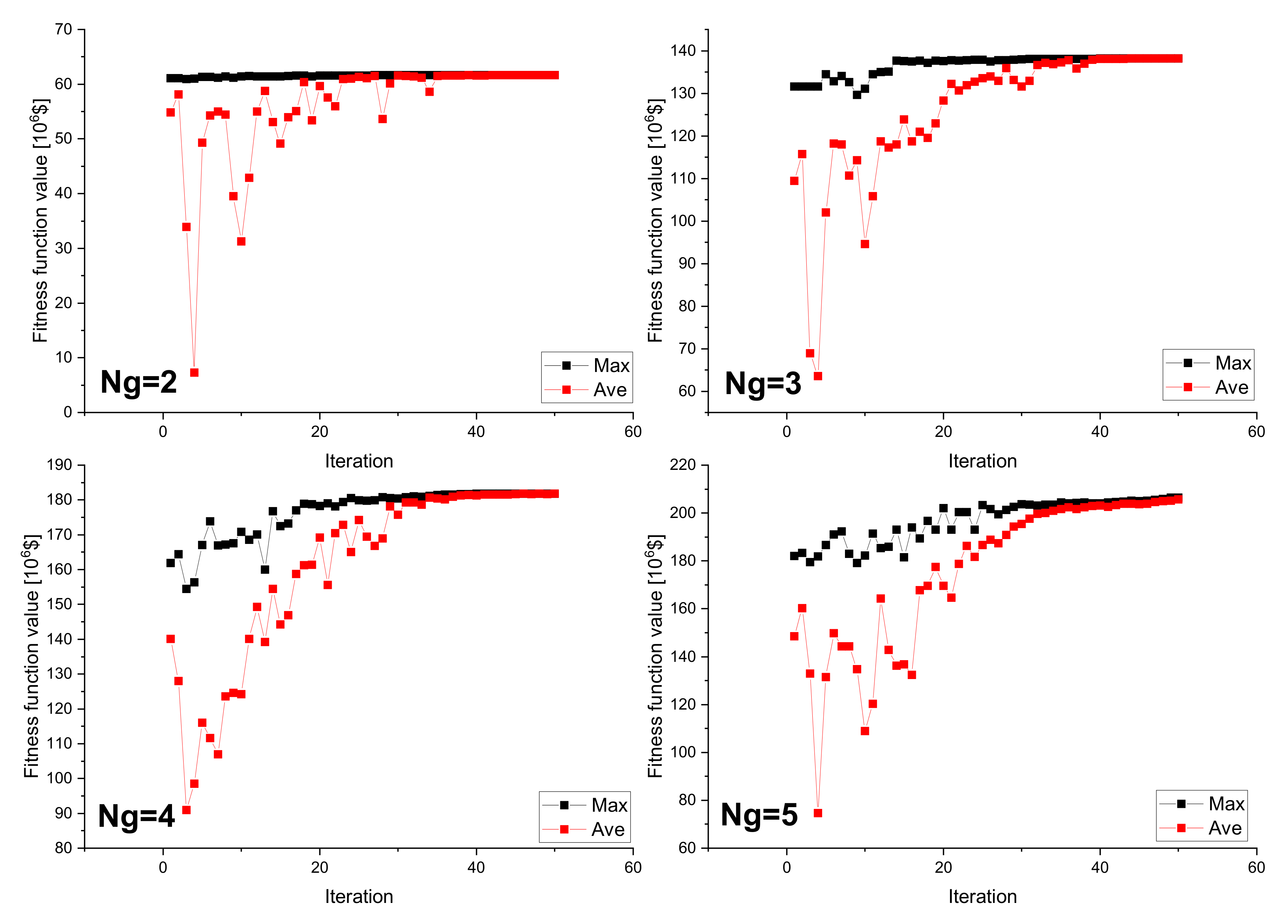
4.3. Optimization Run Convergence
4.4. Model Limitation
5. Conclusions
- It seems necessary to use a minimum of two different optimization methods to validate the quality of the solutions obtained,
- The optimization model developed can be used to complement the manual search method,
- Multilateral wells will be concerned as a must in the effective management of hydrocarbon reservoirs, especially in an off-shore application; thus, optimization of trajectory planning should be taken into consideration,
- The proposed end-point optimization model integrates well trajectory planning with the reservoir model; thus, the obtained results can be used in effective reservoir management in different time domains,
- Our end-point algorithm is easily implemented in the reservoir model and, based on the application of the population-type optimization algorithm, is time-efficient, as well as effortlessly scalable among various models.
Author Contributions
Funding
Conflicts of Interest
References
- Janiga, D. Model Optymalizacji Udostepnienia i Eksploatacji Zloza Weglowodorow z Wykorzystaniem Sztucznej Inteligencji. Ph.D. Thesis, AGH University of Science and Technology, Krakow, Poland, 2017. [Google Scholar]
- Yue, P.; Jia, B.; Sheng, J.; Lei, T.; Tang, C. A coupling model of water breakthrough time for a multilateral horizontal well in a bottom water-drive reservoir. J. Pet. Sci. Eng. 2019, 177, 317–330. [Google Scholar] [CrossRef]
- Stopa, J.; Rychlicki, S.; Wojnarowski, P.; Kosowski, P. Zastosowanie odwiertow rozgalezionych w eksploatacji zloz ropy i gazu. Wiertnictwo Naft. Gaz 2007, 24, 869–876. [Google Scholar]
- Elyasi, S. Assessment and evaluation of degree of multilateral well’s performance for determination of their role in oil recovery at a fractured reservoir in Iran. Egypt. J. Pet. 2016, 25, 1–14. [Google Scholar] [CrossRef][Green Version]
- Chin, W.C. Quantitative Methods in Reservoir Engineering; Gulf Professional Publishing: Houston, TX, USA, 2002. [Google Scholar]
- Tangparitkul, S. Evaluation of effecting factors on oil recovery using the desirability function. J. Pet. Explor. Prod. Technol. 2018, 8, 1199–1208. [Google Scholar] [CrossRef]
- Abusahmin, B.S.; Karri, R.R.; Maini, B.B. Influence of fluid and operating parameters on the recovery factors and gas oil ratio in high viscous reservoirs under foamy solution gas drive. Fuel 2017, 197, 497–517. [Google Scholar] [CrossRef]
- Song, X.; Zhang, C.; Shi, Y.; Li, G. Production performance of oil shale in-situ conversion with multilateral wells. Energy 2019, 189, 116145. [Google Scholar] [CrossRef]
- Wei, Y.; Jia, A.; Wang, J.; Luo, C.; Qi, Y. Semi-analytical Modeling of Pressure-Transient Response of Multilateral Horizontal Well with Pressure Drop along Wellbore. J. Nat. Gas Sci. Eng. 2020, 80, 103374. [Google Scholar] [CrossRef]
- Yang, Y.; Cui, S.; Ni, Y.; Zhang, G.; Li, L.; Meng, Z. Key technology for treating slack coal blockage in CBM recovery: A case study from multi-lateral horizontal wells in the Qinshui Basin. Nat. Gas Ind. B 2016, 3, 66–70. [Google Scholar] [CrossRef][Green Version]
- Chen, D.; Pan, Z.; Liu, J.; Connell, L.D. Characteristic of anisotropic coal permeability and its impact on optimal design of multi-lateral well for coalbed methane production. J. Pet. Sci. Eng. 2012, 88, 13–28. [Google Scholar] [CrossRef]
- Zhou, S.W.; Sun, F.J.; Zeng, X.L.; Fang, M.J. Application of multilateral wells with limited sand production to heavy oil reservoirs. Pet. Explor. Dev. 2008, 35, 630–635. [Google Scholar] [CrossRef]
- Shi, Y.; Song, X.; Wang, G.; McLennan, J.; Forbes, B.; Li, X.; Li, J. Study on wellbore fluid flow and heat transfer of a multilateral-well CO2 enhanced geothermal system. Appl. Energy 2019, 249, 14–27. [Google Scholar] [CrossRef]
- Aadnøy, B.S. Technology Focus: Multilateral and Complex-Trajectory Wells. J. Pet. Technol. 2019, 71, 71. [Google Scholar] [CrossRef]
- Lyu, Z.; Song, X.; Li, G. A semi-analytical method for the multilateral well design in different reservoirs based on the drainage area. J. Pet. Sci. Eng. 2018, 170, 582–591. [Google Scholar] [CrossRef]
- Lyu, Z.; Song, X.; Geng, L.; Li, G. Optimization of multilateral well configuration in fractured reservoirs. J. Pet. Sci. Eng. 2019, 172, 1153–1164. [Google Scholar] [CrossRef]
- Buhulaigah, A.; Al-Mashhad, A.S.; Al-Arifi, S.A.; Al-Kadem, M.S.; Al-Dabbous, M.S. Multilateral wells evaluation utilizing artificial intelligence. In Proceedings of the SPE Middle East Oil & Gas Show and Conference, Manama, Bahrain, 6–9 March 2017; Society of Petroleum Engineers: Richardson, TX, USA, 2017. Available online: https://www.onepetro.org/conference-paper/SPE-183688-MS (accessed on 15 June 2020).
- Garrouch, A.A.; Lababidi, H.M.; Ebrahim, A.S. A web-based expert system for the planning and completion of multilateral wells. J. Pet. Sci. Eng. 2005, 49, 162–181. [Google Scholar] [CrossRef]
- Xu, B.; Baird, R.; Vukovich, G. Fuzzy evolutionary algorithms and automatic robot trajectory generation. In Methods and Applications of Intelligent Control; Springer: Dordrecht, The Netherlands, 1997; pp. 423–449. [Google Scholar]
- Miller, B.L.; Goldberg, D.E. Genetic algorithms, tournament selection, and the effects of noise. Complex Syst. 1995, 9, 193–212. [Google Scholar]
- Alajmi, A.; Wright, J. Selecting the most efficient genetic algorithm sets in solving unconstrained building optimization problem. Int. J. Sustain. Built Environ. 2014, 3, 18–26. [Google Scholar] [CrossRef]
- Eberhart, C.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; IEEE: New York, NY, USA, 1995; Volume 1, pp. 39–43. [Google Scholar]
- Kennedy, J. Particle swarm optimization. In Encyclopedia of Machine Learning; Springer: Berlin/Heidelberg, Germany, 2011; pp. 760–766. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings. IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Almeida, L.F.; Tupac, Y.J.; Pacheco, M.A.C.; Vellasco, M.M.B.R.; Lazo, J.G.L. Evolutionary optimization of smart-wells control under technical uncertainties. In Proceedings of the Latin American & Caribbean Petroleum Engineering Conference, Buenos Aires, Argentina, 15–18 April 2007; Society of Petroleum Engineers: Richardson, TX, USA, 2007. Available online: https://www.onepetro.org/conference-paper/SPE-107872-MS (accessed on 15 June 2020).
- Awotunde, A.A.; Sibaweihi, N. Consideration of voidage-replacement ratio in well-placement optimization. SPE Econ. Manag. 2014, 6, 40–54. [Google Scholar] [CrossRef]
- Bellout, M.C.; Echeverría Ciaurri, D.; Durlofsky, L.; Foss, B.; Kleppe, J. Joint optimization of oil well placement and controls. Comput. Geosci. 2012, 16, 1061–1079. [Google Scholar] [CrossRef]
- Brouwer, D.; Jansen, J. Dynamic Optimization of Waterflooding With Smart Wells Using Optimal Control Theory. In Proceedings of the European Petroleum Conference, Aberdeen, UK, 29–31 October 2002. [Google Scholar] [CrossRef]
- Doublet, D.C.; Aanonsen, S.I.; Tai, X.C. An efficient method for smart well production optimisation. J. Pet. Sci. Eng. 2009, 69, 25–39. [Google Scholar] [CrossRef]
- Forouzanfar, F.; Reynolds, A. Well-placement optimization using a derivative-free method. J. Pet. Sci. Eng. 2013, 109, 96–116. [Google Scholar] [CrossRef]
- Gross, H. Response surface approaches for large decision trees: Decision making under uncertainty. In Proceedings of the ECMOR XIII-13th European Conference on the Mathematics of Oil Recovery, Biarritz, France, 10–13 September 2012. [Google Scholar]
- Isebor, O.J.; Durlofsky, L.J. Biobjective optimization for general oil field development. J. Pet. Sci. Eng. 2014, 119, 123–138. [Google Scholar] [CrossRef]
- Janiga, D.; Czarnota, R.; Stopa, J.; Wojnarowski, P. Self-adapt reservoir clusterization method to enhance robustness of well placement optimization. J. Pet. Sci. Eng. 2019, 173, 37–52. [Google Scholar] [CrossRef]
- El-Sayed, A.A.H.; AI-Awad, M.; Al-Blehed, M.; Al-Saddiqui, M. An Economic Model for Assessing the Feasibility of Multilateral Wells. J. King Saud Univ.-Eng. Sci. 2001, 13, 153–176. [Google Scholar] [CrossRef]
- Manshad, A.K.; Dastgerdi, M.E.; Ali, J.A.; Mafakheri, N.; Keshavarz, A.; Iglauer, S.; Mohammadi, A.H. Economic and productivity evaluation of different horizontal drilling scenarios: Middle East oil fields as case study. J. Pet. Explor. Prod. Technol. 2019, 9, 2449–2460. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Mean | Min | Med | Max | |
|---|---|---|---|---|---|
| Permeability | mD | 29.205 | 15.800 | 27.070 | 65.456 |
| Porosity | (-) | 0.06 | 0.022 | 0.062 | 0.119 |
| Net to gross | (-) | 0.696 | 0.025 | 0.713 | 0.999 |
| Oil saturation | (-) | 0.127 | 0 | 0 | 0.909 |
| Pressure | (bar) | 278.833 | 271.690 | 277.967 | 289.096 |
| Parameter | Symbol | Unit | Value |
|---|---|---|---|
| Oil price | $/m | 517.94 | |
| Gas price | $/m | 0.03 | |
| Oil production cost | $/m | 103 | |
| Gas production cost | $/m | 0.01 | |
| Water production cost | $/m | 8.82 | |
| Well maintenance | $/year | 150,000 | |
| Yearly interest rate | b | % | 19 |
| Trunk drilling cost | $ | 5,900,000 | |
| MLW coefficient | 1 | ||
| − | 2 | ||
| $ | 30,000 |
| Objective Function Value () | ||
|---|---|---|
| Variant | GA | PSO |
| A | 61.644 | 61.628 |
| B | 138.183 | 138.175 |
| C | 179.539 | 181.774 |
| D | 202.976 | 206.480 |
| Nodal Points | ||
|---|---|---|
| Case | Center Point | End-Points |
| A | (38,60) | (40,61) |
| B | (44,61) | (34,59)(48,40) |
| C | (46,38) | (36,31)(40,64)(48,49) |
| D | (46,55) | (51,41)(39,31)(29,58)(33,61) |
| Nodal Points | ||
|---|---|---|
| Case | Center Point | End-Points |
| A | (45,40) | (47,41) |
| B | (44,61) | (33,59)(50,40) |
| C | (44,57) | (47,37)(31,30)(45,64) |
| D | (45,49) | (37,32)(36,63)(42,63)(55,42) |
| Case | Distance between Points (m) | Total (m) | |||
|---|---|---|---|---|---|
| GA algorithm | |||||
| A | 111.8 | 111.8 | |||
| B | 509.9 | 1068.88 | 1578.78 | ||
| C | 559.02 | 850 | 1081.67 | 2490.69 | |
| D | 715.89 | 743.3 | 863.13 | 1250 | 3572.32 |
| PSO algorithm | |||||
| A | 111.8 | 111.8 | |||
| B | 559.02 | 1092.02 | 1651.04 | ||
| C | 403.11 | 522.02 | 1044.03 | 1969.16 | |
| D | 570.09 | 640.31 | 672.68 | 1077.03 | 2960.11 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janiga, D.; Podsobiński, D.; Wojnarowski, P.; Stopa, J. End-Point Model for Optimization of Multilateral Well Placement in Hydrocarbon Field Developments. Energies 2020, 13, 3926. https://doi.org/10.3390/en13153926
Janiga D, Podsobiński D, Wojnarowski P, Stopa J. End-Point Model for Optimization of Multilateral Well Placement in Hydrocarbon Field Developments. Energies. 2020; 13(15):3926. https://doi.org/10.3390/en13153926
Chicago/Turabian StyleJaniga, Damian, Daniel Podsobiński, Paweł Wojnarowski, and Jerzy Stopa. 2020. "End-Point Model for Optimization of Multilateral Well Placement in Hydrocarbon Field Developments" Energies 13, no. 15: 3926. https://doi.org/10.3390/en13153926
APA StyleJaniga, D., Podsobiński, D., Wojnarowski, P., & Stopa, J. (2020). End-Point Model for Optimization of Multilateral Well Placement in Hydrocarbon Field Developments. Energies, 13(15), 3926. https://doi.org/10.3390/en13153926