Distributed Hierarchical Consensus-Based Economic Dispatch for Isolated AC/DC Hybrid Microgrid


Abstract
1. Introduction
2. Literature Review
3. Optimal Scheduling Model for the AC/DC Hybrid Microgrid
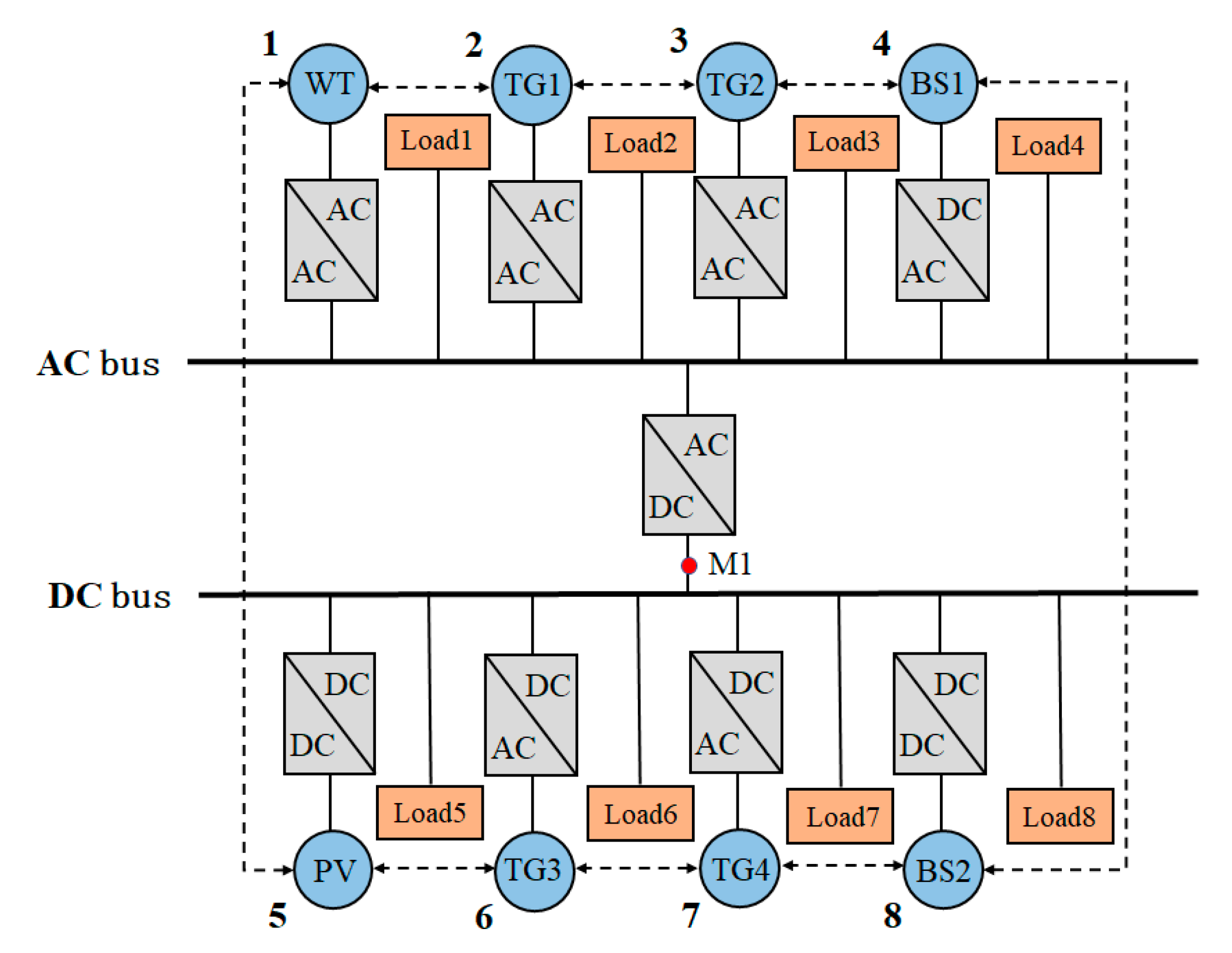
3.1. Structure Information of the AC/DC Hybrid Microgrid
3.2. ED Model for the AC/DC Hybrid Microgrid
3.2.1. Objective Function
Traditional Generator Set Power Generation Cost Function
Wind Generator and Photovoltaic Unit Abandonment Wind Penalty Function
Energy Storage Unit Operating Cost Function
3.2.2. Constraint Conditions
Constraints for Active Supply and Demand Balance
Constraints for Traditional Generator Set Operation
Constraints for Operating the Energy Storage Unit
Wind Generator Photovoltaic Output Constraints
AC and DC Tie Line Constraints
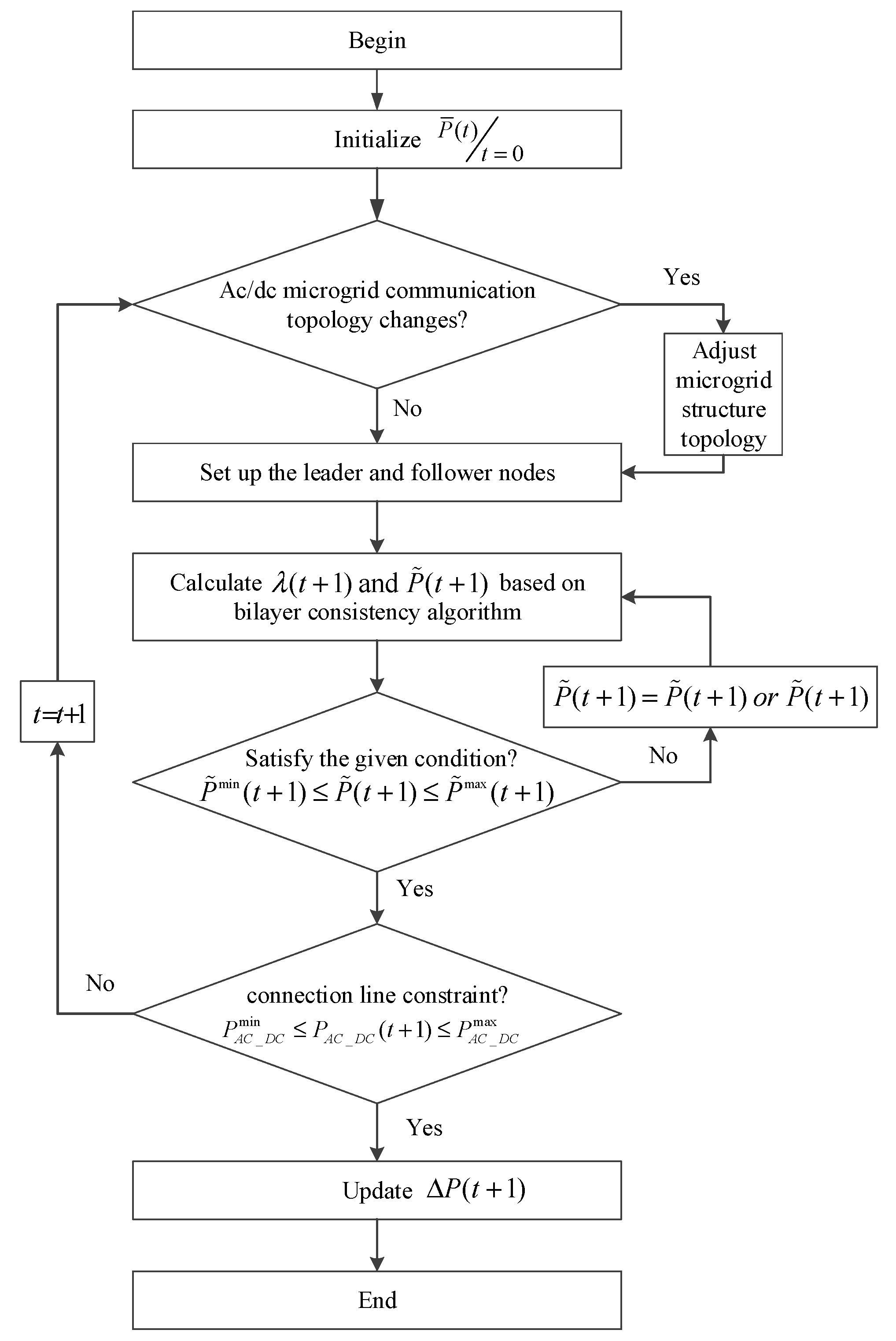
3.2.3. Solutions
4. Two-Layer Consensus Strategy
4.1. Algorithm Design without Considering Constraints
4.2. Algorithm Design with Considering Constraints
5. Case Study
5.1. Single-Period Simulation Analysis
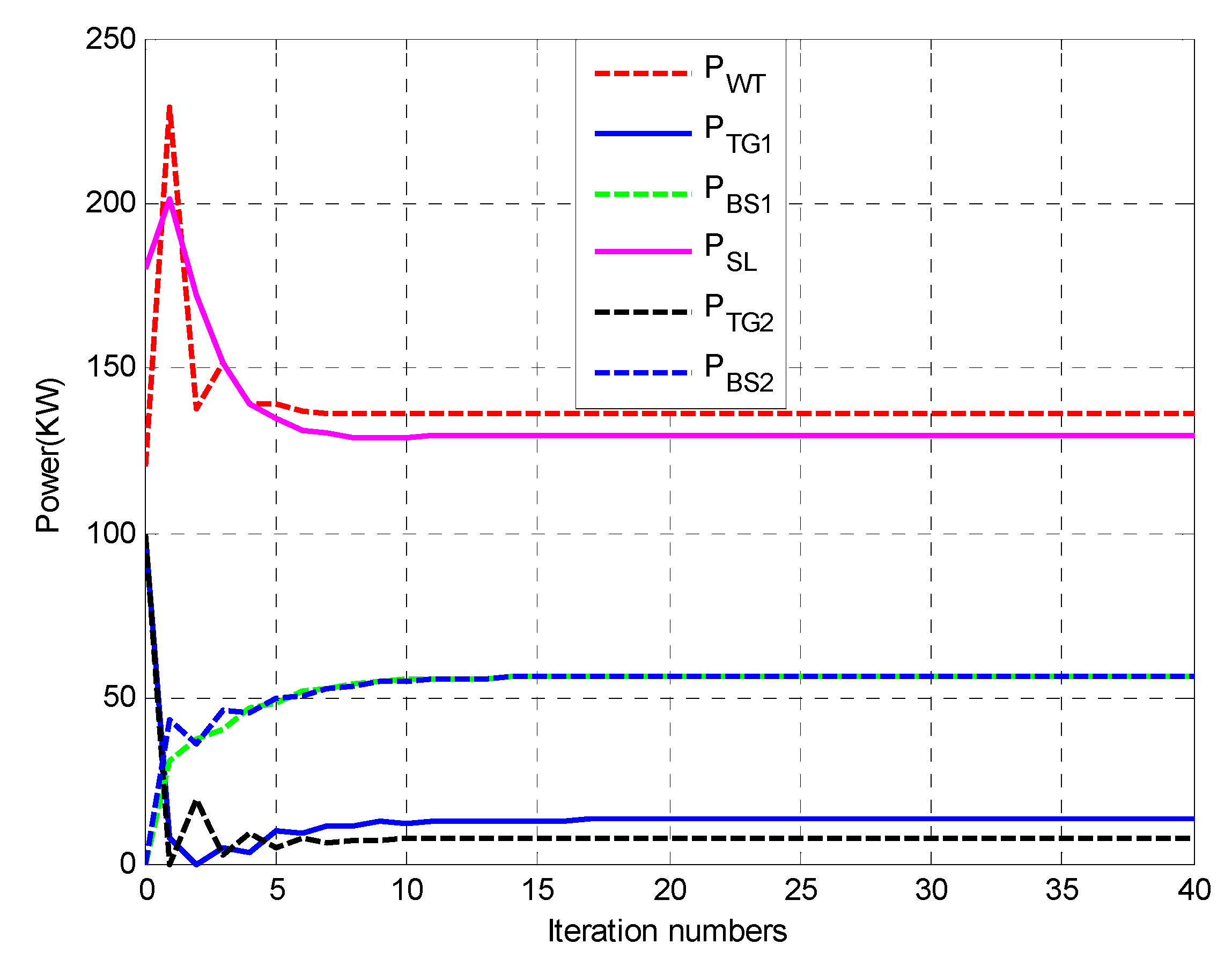
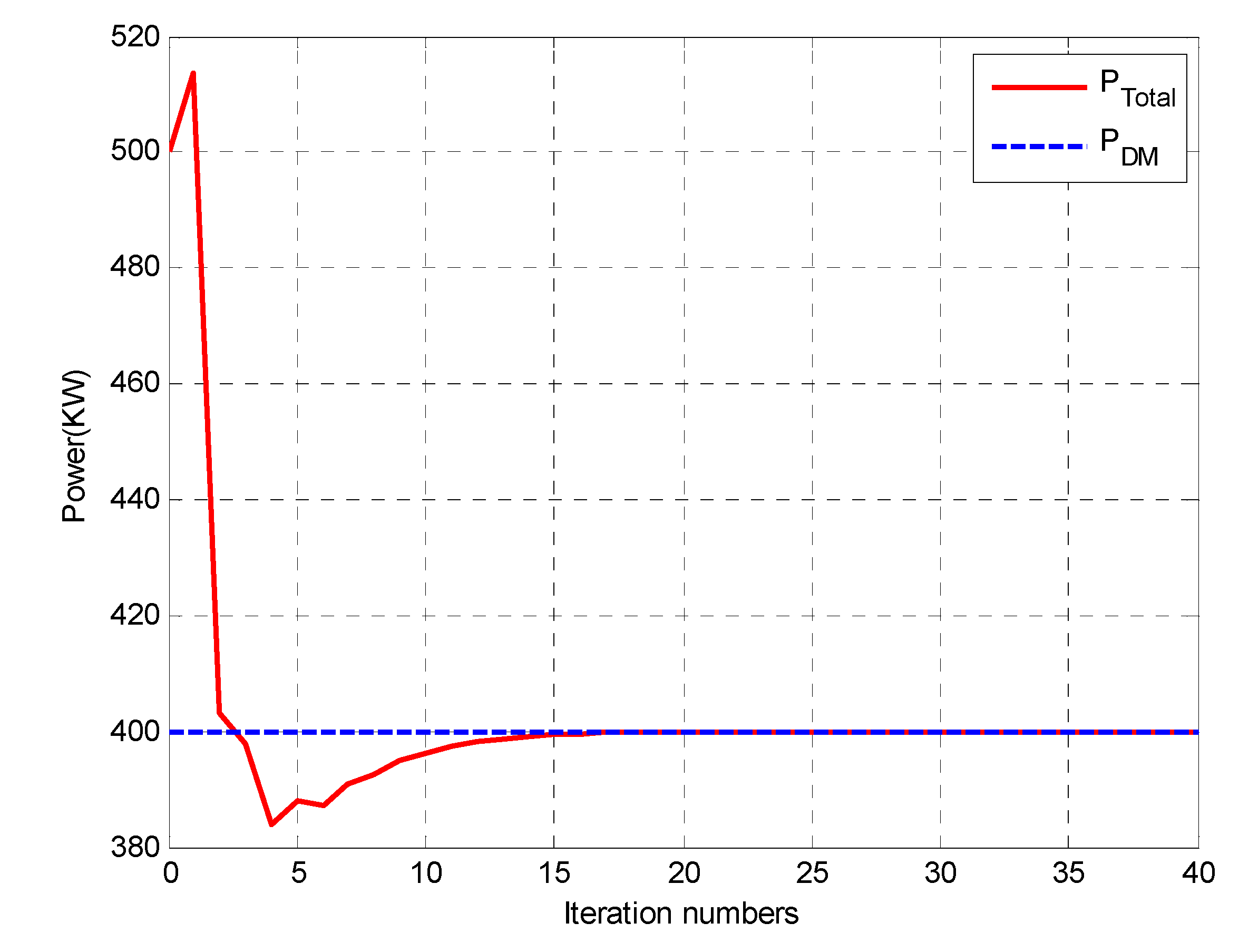
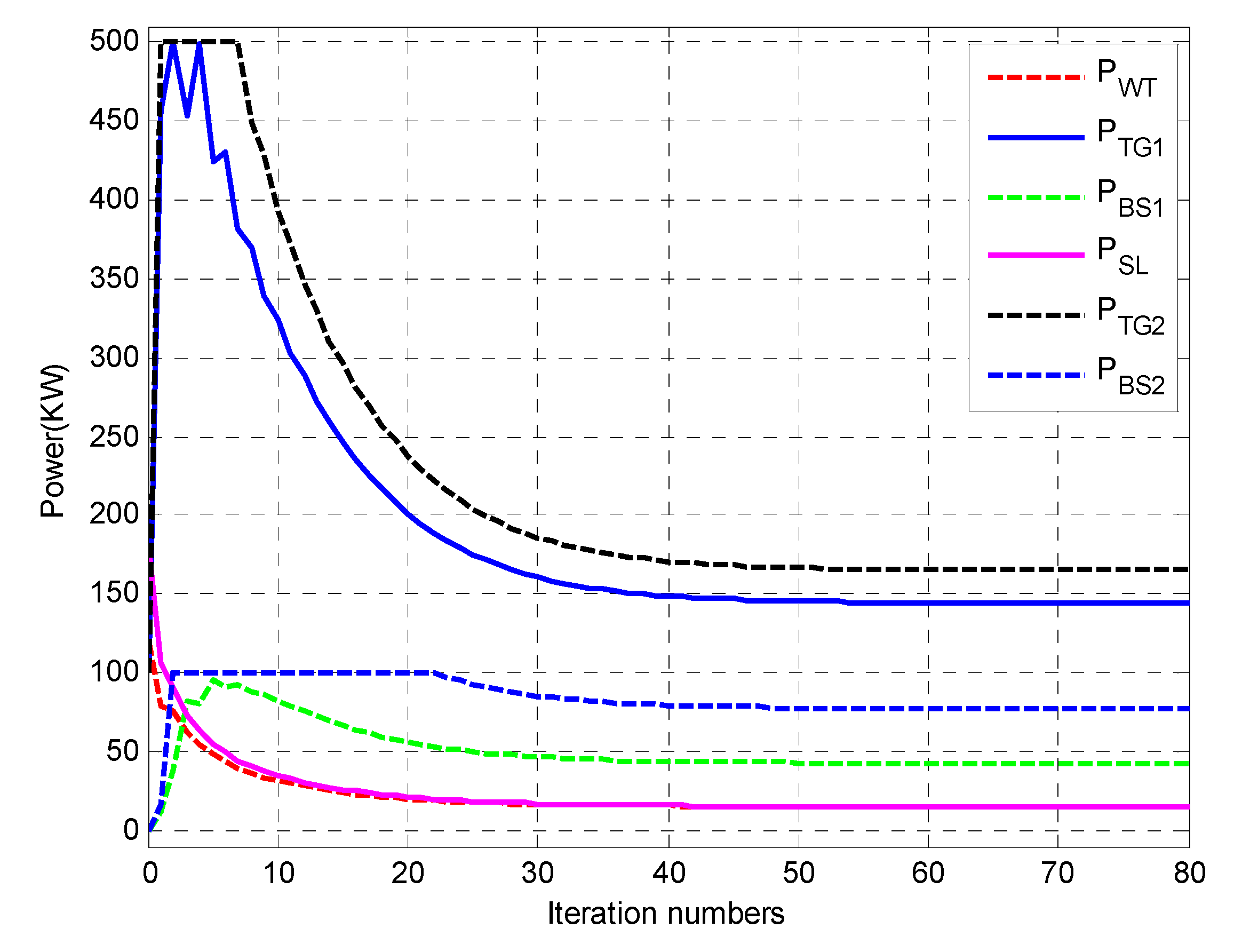
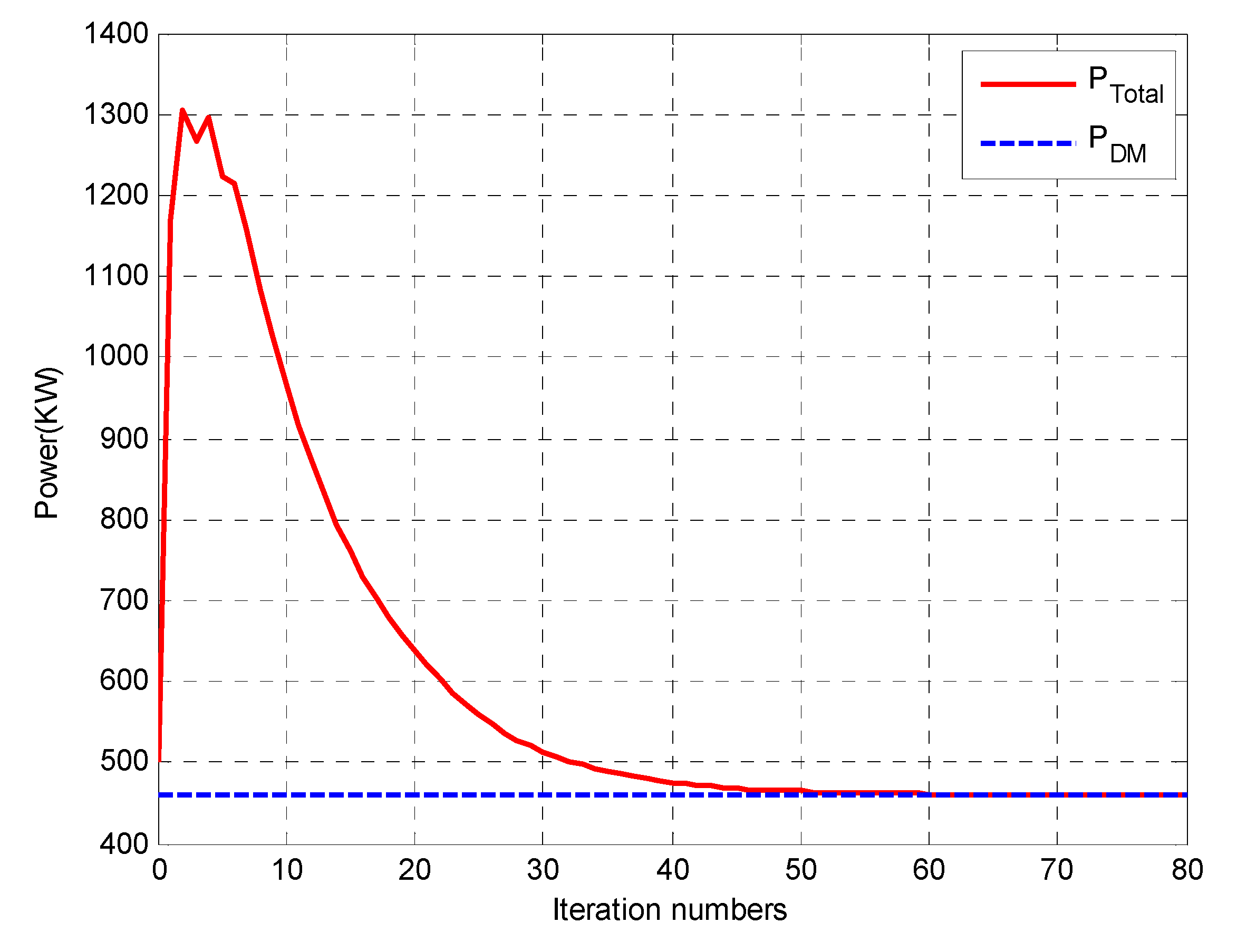
5.1.1. Simulation for AC/DC Hybrid Microgrid
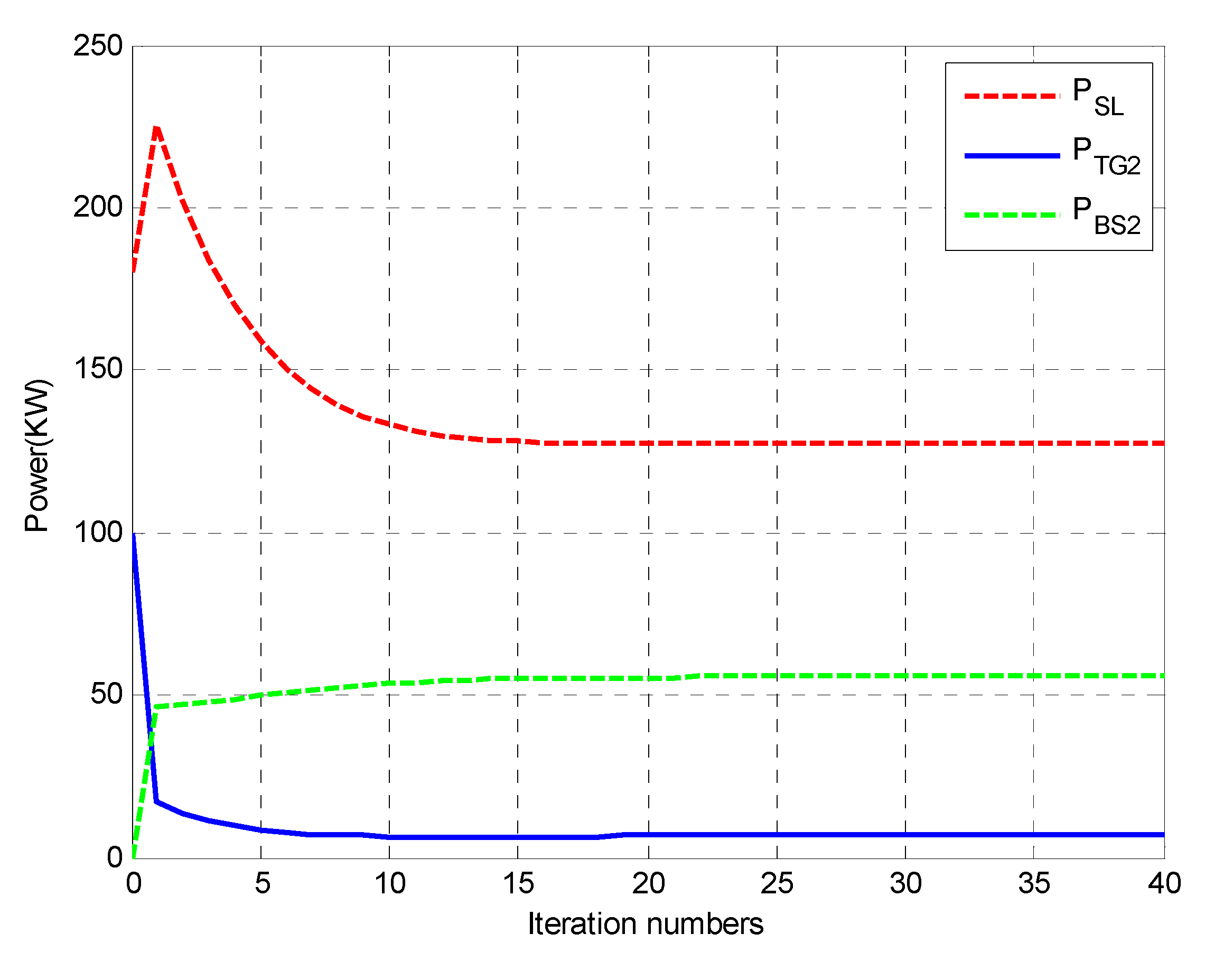
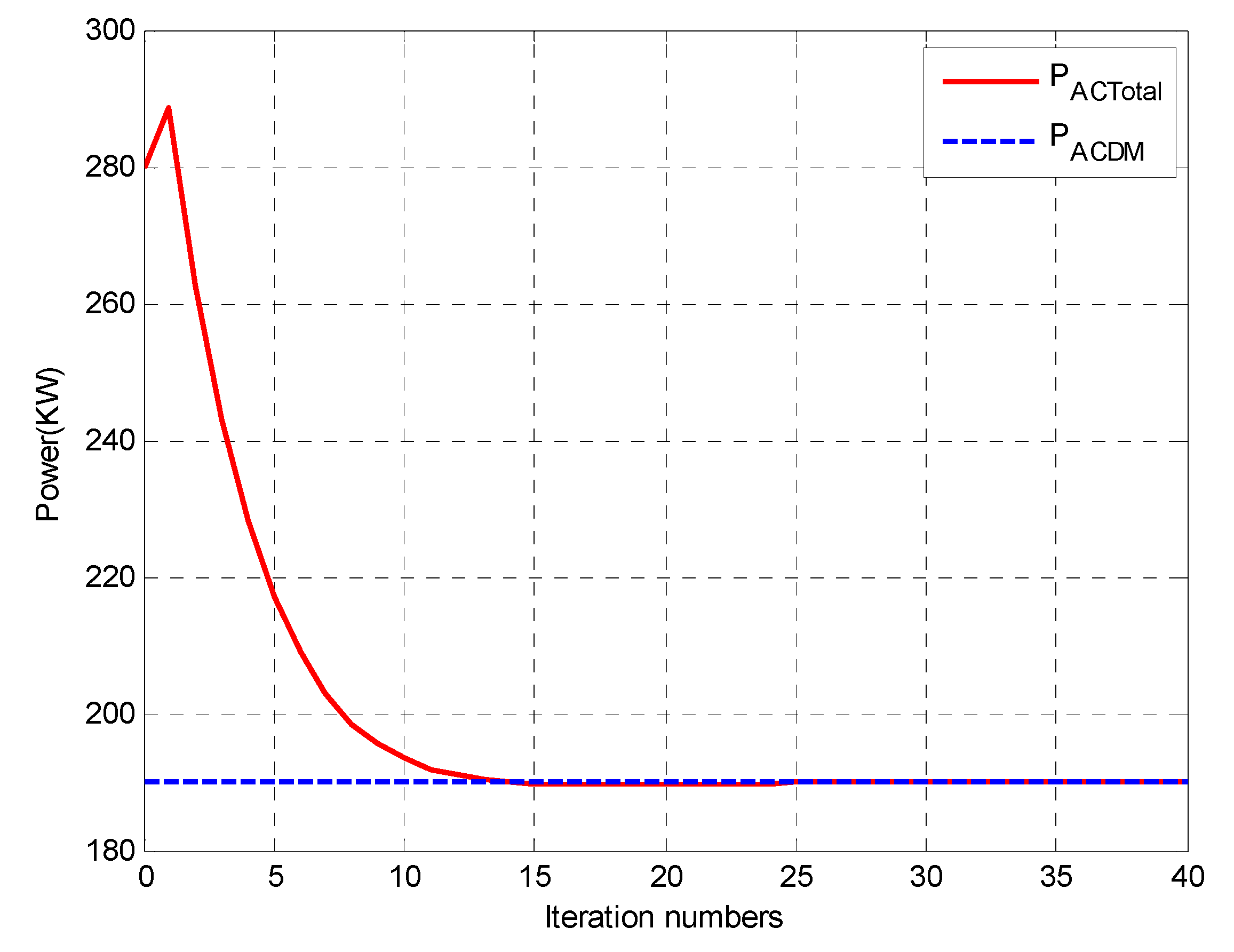
5.1.2. Simulation for AC Sub-Grid
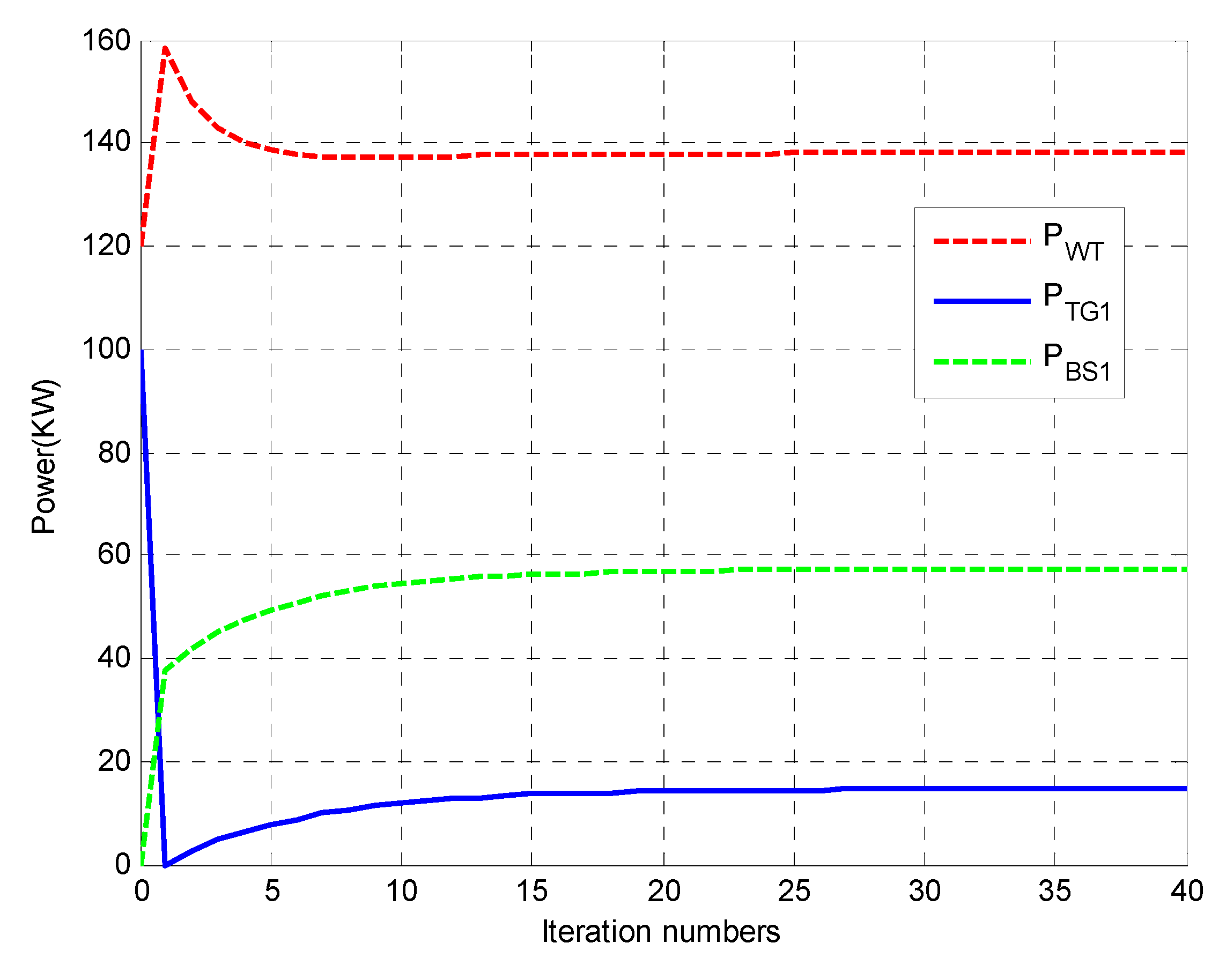
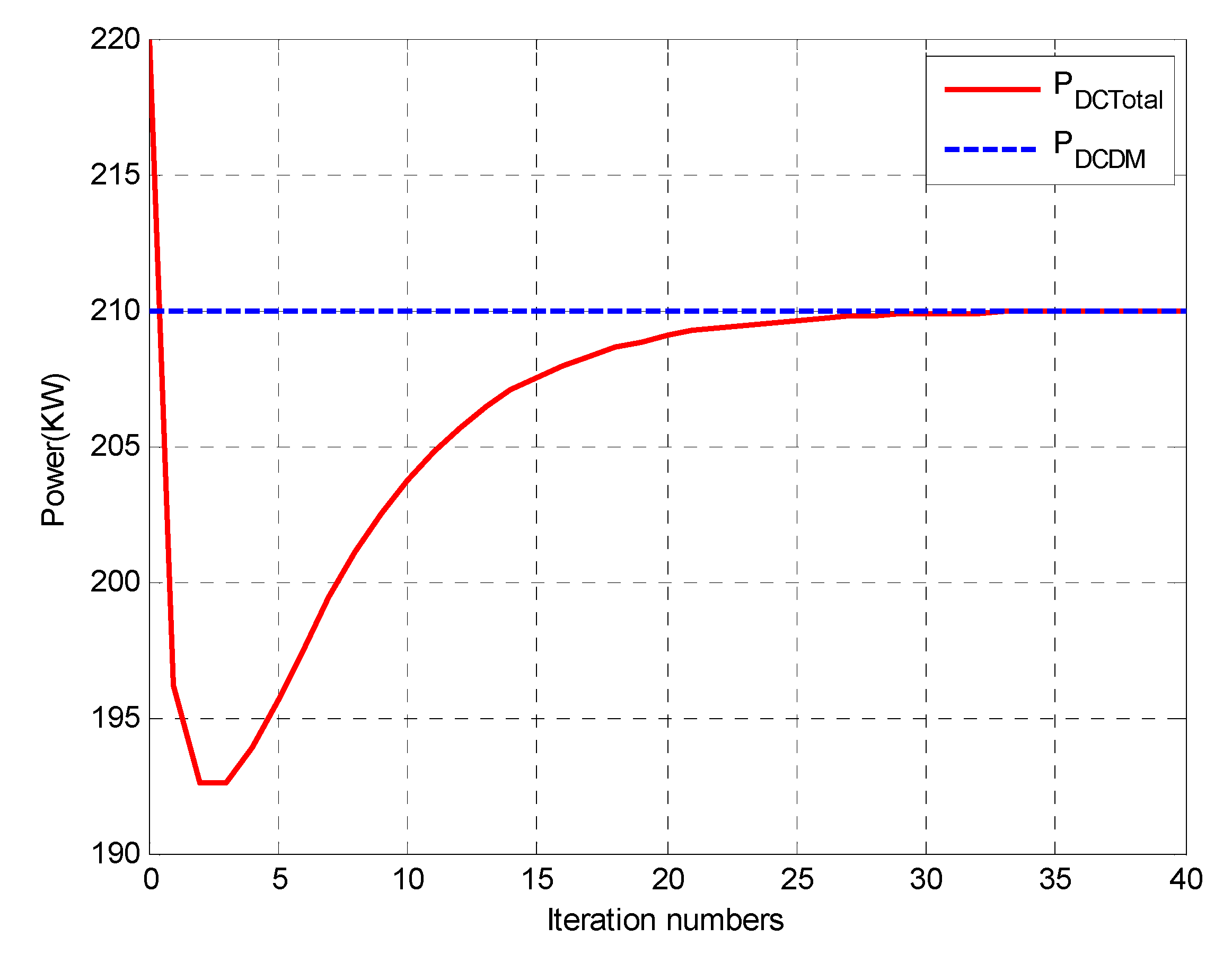
5.1.3. Simulation for DC Sub-Grid
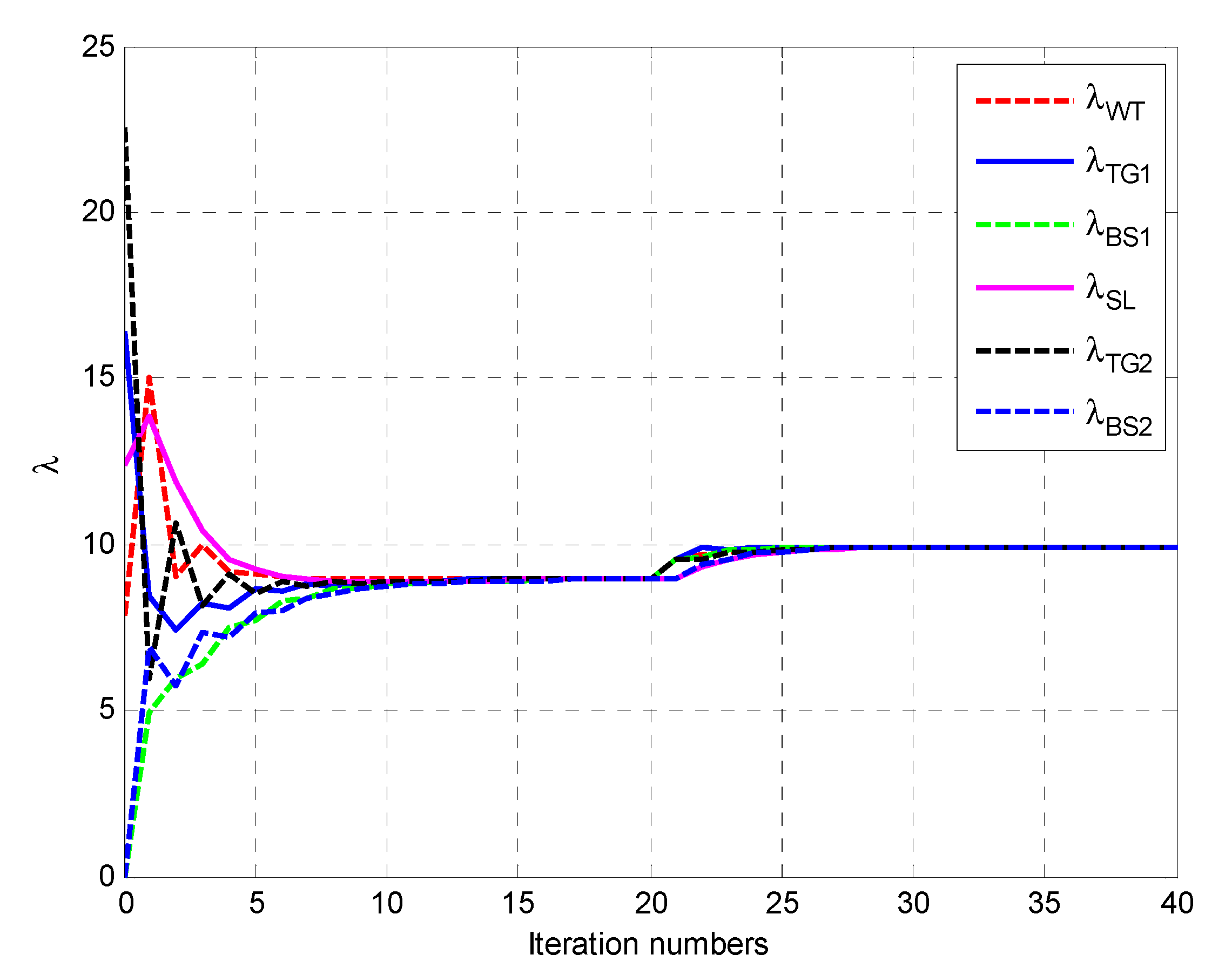
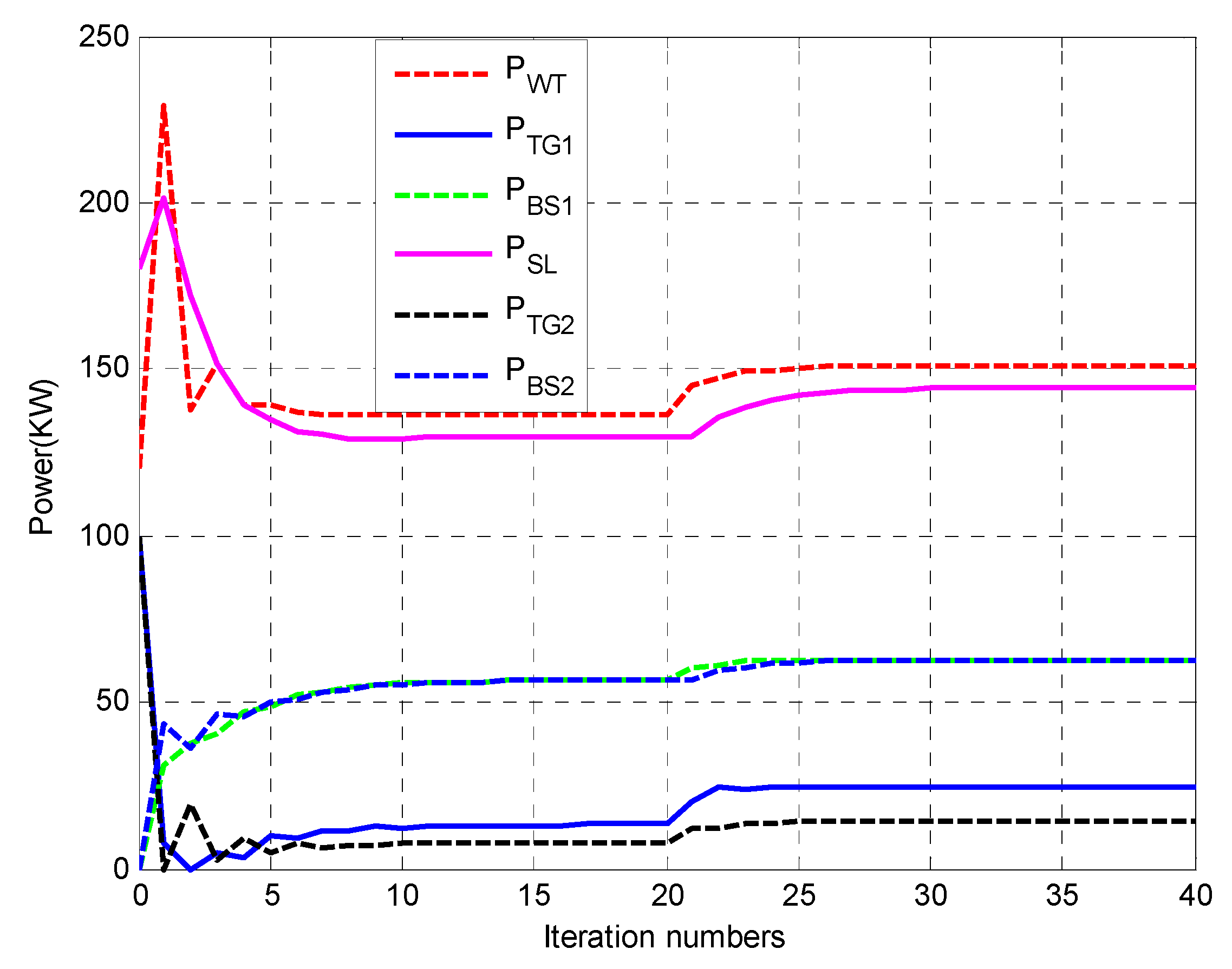
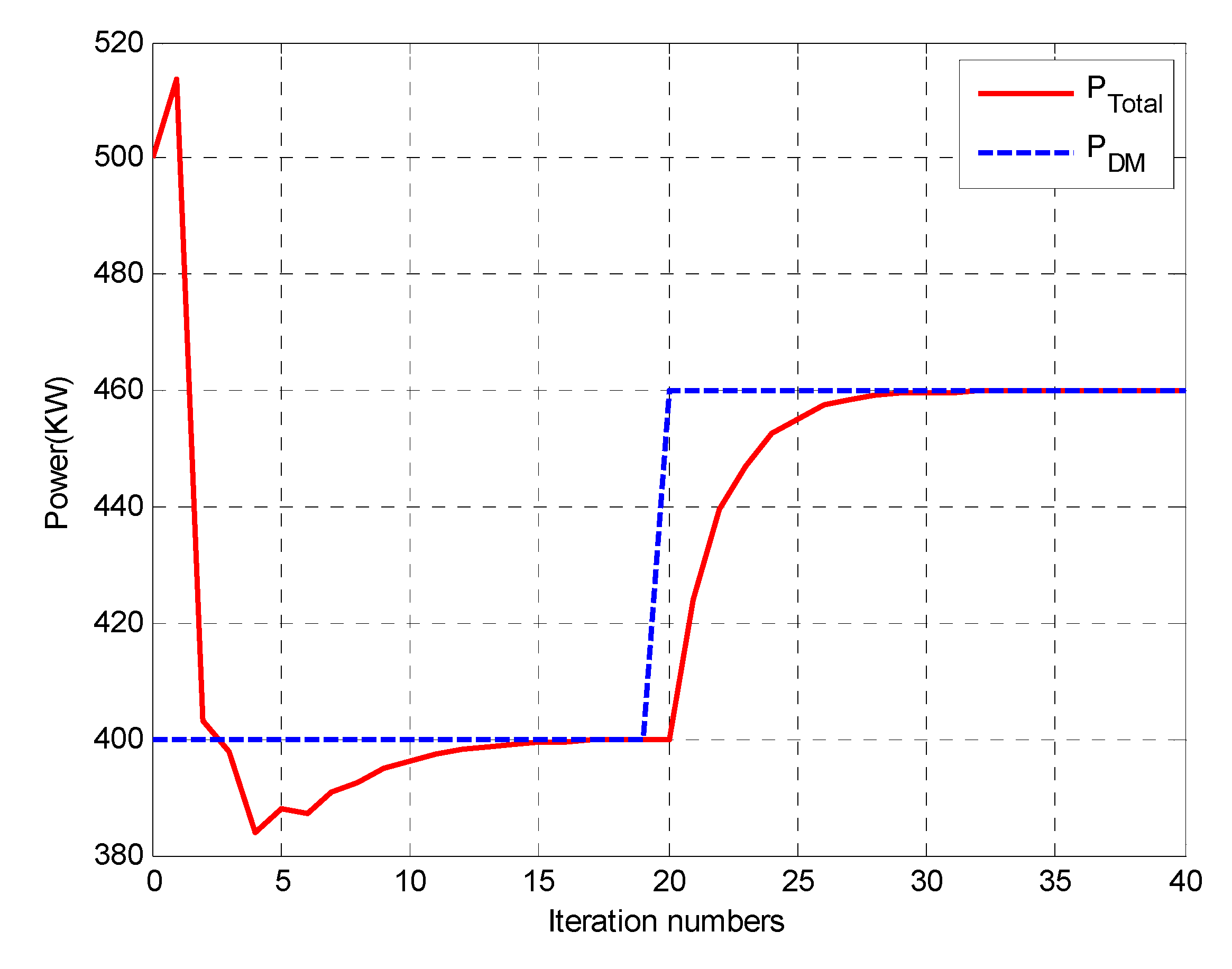
5.2. Multi-Period Simulation Analysis
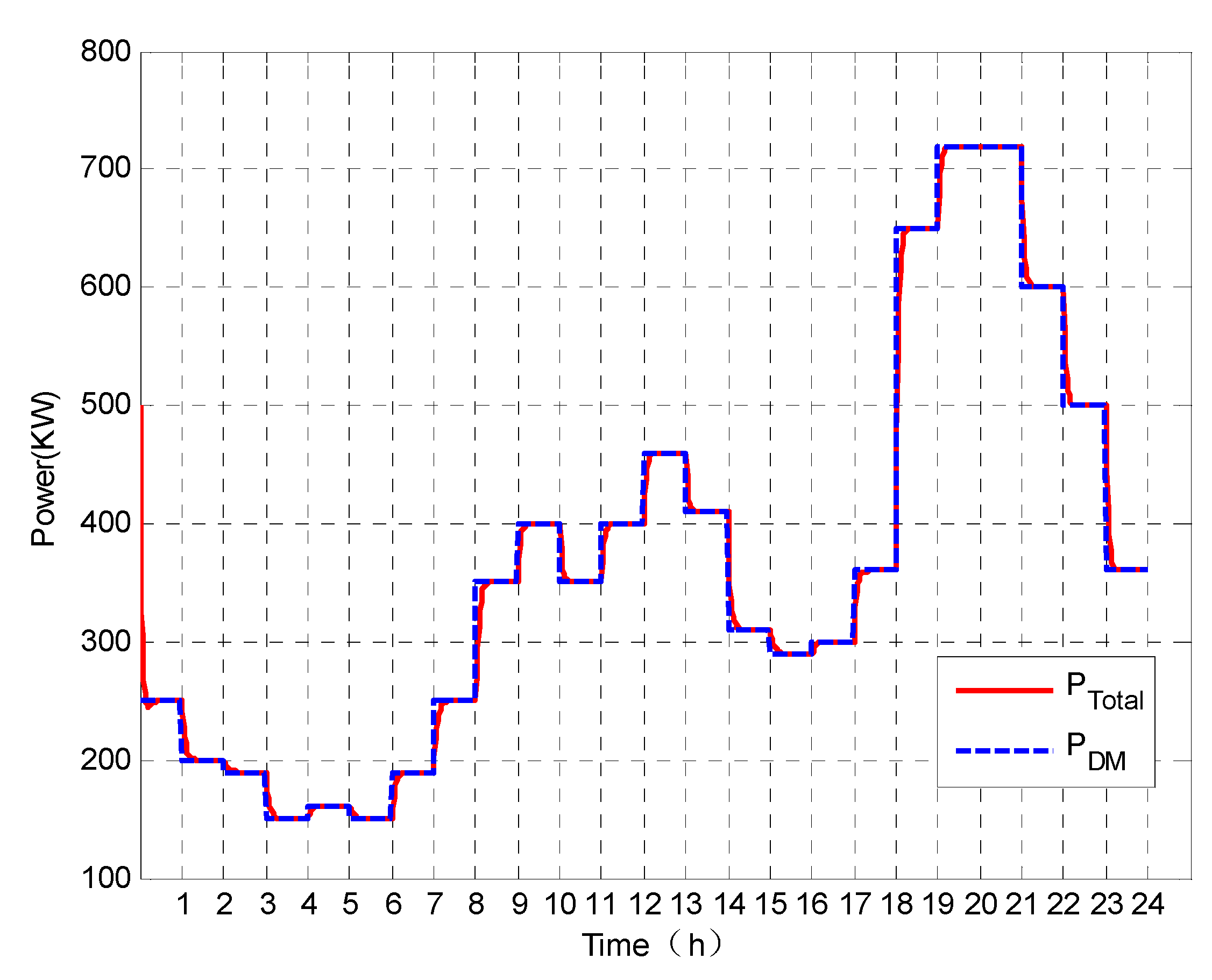
5.3. Full Time-Period Simulation Analysis
5.4. Comparison with the Existing Results
5.4.1. Comparison results
5.4.2. Comparison with Different Parameters
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids. IEEE Power Energy Mag. 2007, 5, 78–94. [Google Scholar] [CrossRef]
- Sao, C.K.; Lehn, W. Control and power management of converter fed microgrids. IEEE Trans. Power Syst. 2008, 23, 1088–1098. [Google Scholar] [CrossRef]
- Akinyele, D.; Belikov, J.; Levron, Y. Challenges of microgrids in remote communities: A steep model application. Energies 2018, 11, 432. [Google Scholar] [CrossRef]
- Mohamed, S.; Shaaban, M.F.; Ismail, M.; Serpedin, E.; Qaraqe, K.A. An efficient planning algorithm for hybrid remote microgrids. IEEE Trans. Sustain. Energy 2019, 10, 257–267. [Google Scholar] [CrossRef]
- Wang, C.; Wu, Z.; Li, P. Research on key technologies of microgrid. Trans. China Electrotech. Soc. 2014, 29, 1–12. [Google Scholar]
- Hooshyar, A.; Iravani, R. Microgird protection. Proc. IEEE 2017, 105, 1332–1353. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed control techniques in microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Song, Y.; Guo, F.; Wen, C. Distributed Control and Optimization Technologies in Smart Grid Systems; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Xu, Y.; Li, Z. Distributed optimal resource management based on the consensus algorithm in a microgrid. IEEE Trans. Power Electron. 2015, 62, 2584–2592. [Google Scholar] [CrossRef]
- Persis, C.D.; Weitenberg, E.R.; Dörfler, F. A power consensus algorithm for DC microgrids. Automatica 2018, 89, 364–375. [Google Scholar]
- Meng, L.; Zhao, X.; Tang, F.; Savaghebi, M.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Distributed voltage unbalance compensation in islanded microgrids by using a dynamic consensus algorithm. IEEE Trans. Power Electron. 2016, 31, 827–838. [Google Scholar] [CrossRef]
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage stability and reactive power sharing in inverter-based microgrids with consensus-based distributed voltage control. IEEE Trans. Control Syst. Technol. 2016, 24, 96–109. [Google Scholar] [CrossRef]
- Meng, L.; Dragicevic, T.; Roldán-Pérez, J.; Vasquez, J.C.; Guerrero, J.M. Modeling and sensitivity study of consensus algorithm-based distributed hierarchical control for DC microgrids. IEEE Trans. Smart Grid 2016, 7, 1504–1515. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical structure of microgrids control system. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Shafiee, Q. Robust networked control scheme for distributed secondary control of islanded microgrids. IEEE Trans. Ind. Electron. 2014, 61, 5363–5374. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A.; Lewis, F.L.; Guerrero, J.M. Distributed cooperative secondary control of microgrids using feedback linearization. IEEE Trans. Power Syst. 2013, 28, 3462–3470. [Google Scholar] [CrossRef]
- Zhang, G.; Li, C.; Qi, D.; Xin, H. Distributed estimation and secondary control of autonomous microgrid. IEEE Trans. Power Syst. 2017, 32, 989–998. [Google Scholar] [CrossRef]
- Chen, G.; Feng, E. Distributed secondary control and optimal power sharing in microgrids. IEEE/CAA J. Autom. Sin. 2015, 2, 304–312. [Google Scholar]
- Liu, X.; Wang, P.; Loh, P. A hybrid AC/DC microgrid and its coordination control. IEEE Trans. Smart Grid 2011, 2, 278–286. [Google Scholar]
- Navarro-Rodríguez, Á.; García, P.; Georgious, R.; García, J. Adaptive active power sharing techniques for DC and AC voltage control in a hybrid DC/AC microgrid. IEEE Trans. Ind. Appl. 2019, 55, 1106–1116. [Google Scholar] [CrossRef]
- Eajal, A.; Yazdavar, A.; El-Saadany, E.; Ponnambalam, K. On the loadability and voltage stability of islanded AC-DC hybrid microgrids during contingencies. IEEE Syst. J. 2019, 13, 4248–4259. [Google Scholar] [CrossRef]
- Nejabatkhah, F.; Li, Y. Overview of power management strategies of hybrid AC/DC microgrid. IEEE Trans. Power Electron. 2015, 30, 7072–70789. [Google Scholar] [CrossRef]
- Eghtedarpour, N.; Farjah, E. Power control and management in a hybrid AC/DC microgrid. IEEE Trans. Smart Grid 2014, 5, 1494–1505. [Google Scholar] [CrossRef]
- Xia, Y.; Wei, W.; Yu, M.; Wang, X.; Peng, Y. Power management for a hybrid AC/DC microgrid with multiple subgrids. IEEE Trans. Power Electron. 2018, 33, 3520–3533. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, H.; Sun, Q.; Ma, D.; Huang, B. Event-based distributed active power sharing control for interconnected AC and DC microgrids. IEEE Trans. Smart Grid 2018, 9, 6815–6828. [Google Scholar] [CrossRef]
- Yoo, H.Y.; Nguyen, T.T.; Kim, H.M. Consensus-based distributed coordination control of hybrid AC/DC microgrids. IEEE Trans. Sustain. Energy 2020, 11, 629–638. [Google Scholar] [CrossRef]
- Melath, G.; Rangarajan, S.; Agarwal, V. A novel control scheme for enhancing the transient performance of an islanded hybrid AC-DC microgrid. IEEE Trans. Power Electron. 2019, 34, 9644–9654. [Google Scholar] [CrossRef]
- Li, X.; Guo, L.; Li, Y.; Guo, Z.; Hong, C.; Zhang, Y.; Wang, C. A unified control for the DC-AC interlinking converters in hybrid AC/DC microgrids. IEEE Trans. Smart Grid 2018, 9, 6540–6553. [Google Scholar] [CrossRef]
- Rousis, A.; Konstantelos, L.; Strbac, G. A planning model for a hybrid AC-DC microgrid using a novel GA/AC OPF algorithm. IEEE Trans. Power Syst. 2020, 35, 227–237. [Google Scholar] [CrossRef]
- Aprlia, E.; Meng, K.; Hosani, M.; Zeineldin, H.; Dong, Z. Unified power flow algorithm for standalone AC/DC hybrid microgrids. IEEE Trans. Smart Grid 2019, 10, 639–649. [Google Scholar] [CrossRef]
- Zhang, Z.; Chow, M. Convergence analysis of the incremental cost consensus algorithm under different communication network topologies in a smart grid. IEEE Trans. Power Syst. 2013, 27, 1761–1768. [Google Scholar] [CrossRef]
- Zhao, C.; He, J.; Cheng, P.; Chen, J. Analysis of consensus-based distributed economic dispatch under stealthy attacks. IEEE Trans. Ind. Electron. 2018, 64, 5107–5117. [Google Scholar] [CrossRef]
- Hamdi, M.; Chaoui, M.; Idoumghar, L.; Kachouri, A. Coordinated consensus for smart grid economic environmental power dispatch with dynamic communication network. IET Gener. Transm. Distrib. 2018, 12, 2603–2613. [Google Scholar] [CrossRef]
- Yang, S.; Tan, S.; Xu, J. Consensus based approach for economic dispatch problem in a smart grid. IEEE Trans. Power Syst. 2013, 28, 4416–4426. [Google Scholar] [CrossRef]
- Tang, Z.; Hill, D.H.; Liu, T. A novel consensus-based economic dispatch for microgrids. IEEE Trans. Smart Grid 2018, 9, 3920–3922. [Google Scholar] [CrossRef]
- Wang, R.; Li, Q.; Zhang, B.; Wang, L. Distributed consensus based algorithm for economic dispatch in a microgrid. IEEE Trans. Smart Grid 2019, 10, 3630–3640. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z. Delay effects on consensus-based distributed economic dispatch algorithm in microgrid. IEEE Trans. Power Syst. 2018, 33, 602–612. [Google Scholar] [CrossRef]
- Lv, Z.; Wu, Z.; Dou, X.; Zhou, M.; Hu, W. Distributed economic dispatch scheme for droop-based autonomous DC microgrid. Energies 2020, 13, 404. [Google Scholar] [CrossRef]
- He, H.; Han, B.; Xu, C.; Zhang, L.; Li, G.; Wang, K. Optimal management system of hybrid AC/DC microgrid based on consensus protocols. Electr. Power Autom. Equip. 2018, 38, 138–146. [Google Scholar]
- Lin, P.; Jin, C.; Xiao, J.; Li, X.; Shi, D.; Tang, Y.; Wang, P. A distributed control architecture for global system economic operation in autonomous hybrid AC/DC microgrids. IEEE Trans. Smart Grid 2019, 10, 2603–2617. [Google Scholar] [CrossRef]
- Jiang, K.; Wu, K.; Zong, X. Dynamic economic dispatch of AC/DC microgrid based on finite-step consensus algorithm. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019; pp. 1909–1914. [Google Scholar]
- Jiang, K.; Wu, F.; Zong, X.; Shi, L.; Lin, K. Distributed dynamic economic dispatch of an isolated AC/DC hybrid microgrid based on a finite-step consensus algorithm. Energies 2019, 12, 4637. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, Y.; Liu, W.; Zang, C.; Yu, H. Distributed online optimal energy management for smart grids. IEEE Trans. Ind. Informat. 2015, 11, 717–727. [Google Scholar] [CrossRef]
- Wood, A.; Wollenberg, B. Power Generation, Operation, and Control; John Wiley & Sons: New York, NY, USA, 1996. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Time Period | Load/kW | PV/kW | Wind Generator/kW |
|---|---|---|---|---|
| 1 | 00:00–01:00 | 250 | 0 | 83 |
| 2 | 01:00–02:00 | 200 | 0 | 65 |
| 3 | 02:00–03:00 | 190 | 0 | 84 |
| 4 | 03:00–04:00 | 150 | 0 | 62 |
| 5 | 04:00–05:00 | 160 | 0 | 138 |
| 6 | 05:00–06:00 | 150 | 0 | 59 |
| 7 | 06:00–07:00 | 190 | 15 | 143 |
| 8 | 07:00–08:00 | 250 | 35 | 89 |
| 9 | 08:00–09:00 | 350 | 95 | 54 |
| 10 | 09:00–10:00 | 400 | 130 | 84 |
| 11 | 10:00–11:00 | 350 | 150 | 123 |
| 12 | 11:00–12:00 | 400 | 180 | 120 |
| 13 | 12:00–3:00 | 460 | 170 | 104 |
| 14 | 13:00–14:00 | 410 | 150 | 118 |
| 15 | 14:00–15:00 | 310 | 120 | 139 |
| 16 | 15:00–16:00 | 290 | 95 | 55 |
| 17 | 16:00–17:00 | 300 | 70 | 80 |
| 18 | 17:00–18:00 | 360 | 50 | 54 |
| 19 | 18:00–19:00 | 650 | 10 | 69 |
| 20 | 19:00–20:00 | 720 | 0 | 122 |
| 21 | 20:00–21:00 | 720 | 0 | 122 |
| 22 | 21:00–22:00 | 600 | 0 | 137 |
| 23 | 22:00–23:00 | 500 | 0 | 108 |
| 24 | 23:00–24:00 | 360 | 0 | 57 |
| No. | Node | ||||
| 1 | WT | 0.0328 | 7.75 | 220 | [0, 300] |
| 2 | TG1 | 0.0430 | 7.80 | 208 | [0, 500] |
| 3 | BS1 | 0.0790 | 7.62 | 172 | [−100, 100] |
| 4 | PV | 0.0344 | 7.84 | 352 | [0, 300] |
| 5 | TG3 | 0.0736 | 7.80 | 178 | [0, 500] |
| 6 | BS2 | 0.0790 | 7.70 | 175 | [−100, 100] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, K.; Wu, F.; Shi, L.; Lin, K. Distributed Hierarchical Consensus-Based Economic Dispatch for Isolated AC/DC Hybrid Microgrid. Energies 2020, 13, 3209. https://doi.org/10.3390/en13123209
Jiang K, Wu F, Shi L, Lin K. Distributed Hierarchical Consensus-Based Economic Dispatch for Isolated AC/DC Hybrid Microgrid. Energies. 2020; 13(12):3209. https://doi.org/10.3390/en13123209
Chicago/Turabian StyleJiang, Ke, Feng Wu, Linjun Shi, and Keman Lin. 2020. "Distributed Hierarchical Consensus-Based Economic Dispatch for Isolated AC/DC Hybrid Microgrid" Energies 13, no. 12: 3209. https://doi.org/10.3390/en13123209
APA StyleJiang, K., Wu, F., Shi, L., & Lin, K. (2020). Distributed Hierarchical Consensus-Based Economic Dispatch for Isolated AC/DC Hybrid Microgrid. Energies, 13(12), 3209. https://doi.org/10.3390/en13123209