A Novel Hybrid Search and Remove Strategy for Power Balance Wireless Charger Deployment in Wireless Rechargeable Sensor Networks


Abstract
1. Introduction
- The SMRU algorithm can deploy the chargers in the WRSN in less time, and the number of chargers required is relatively small.
- When the sensor position moves, the SMRU algorithm takes less time to correct and deploy the charger positions.
- The SMRU algorithm can calculate the energy consumption of the sink node. Under the premise of supplying enough power to the sink node, the mechanism of the SMRU algorithm can reduce the number of chargers used to charge the sink node without affecting the number of chargers that charge other sensors.
2. Related Works
2.1. Omnidirectional and Directional Chargers
2.2. Wireless Charger and Sensor Deployment
3. Search Most and Remove Useless Algorithm
3.1. Problem Definition
3.2. The SMRU Algorithm
| Algorithm 1 Search the least needs of the chargers |
| Input: The locations of all the sensors and directional charger Output: Positions of chargers 1: Step 1. Randomly select the sensor position as the position of the charger. 2: Step 2. Search for the number of sensors covered by the chargeable radius d at charger position n. 3: while do 4: Record the number of sensors to n in the range. 5: end while 6: Step 3. The charger rotates 360° to find the angle that can cover most of the sensors within the charging range. 7: Step 4. If the number of sensors covered by Step 2 is more than three, Step 3 is repeated for different positions of sensors within the chargeable radius, and the position that covers most of the sensors is selected as the new position of the charger. If the number of sensors covered by Step 2 is less than three, the position of the charger does not change. 8: if () then 9: Search 360° and find the best angle that can cover most of the sensors; 10: Record the number of covered sensors; 11: Compare to the number of covered sensors of other chargers; 12: Record the best charger location and the covered sensors in the range; 13: else 14: Search 360° and find the best angle that can cover most of the sensors; 15: Record the best charger location and the covered sensors. 16: end if 17: Step 5. Repeat Step 2 until all sensors are covered. 18: Step 6. Remove the excess charger positions in which the charger and the sensors covered by the charger can be covered by other chargers. 19: Search all locations of chargers and their covered sensors; 20: if (the charger location is redundant) then 21: Remove the redundant charger location; 22: end if 23: return |
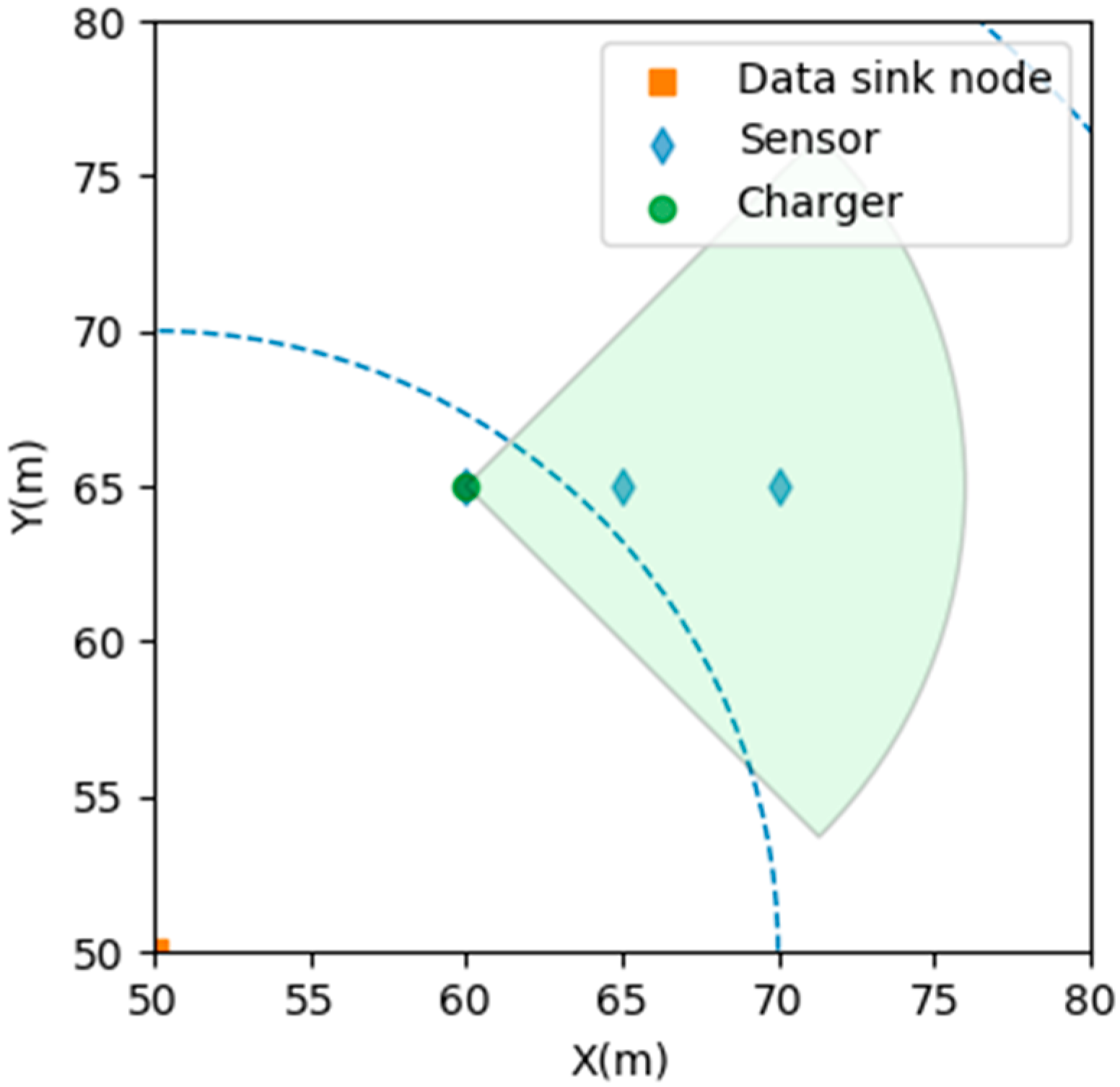
3.3. An Example of SMRU
3.4. Sensor Mobility
| Algorithm 2 Changing the charger position after sensor mobility |
| Input: New locations of all sensors and original locations of chargers. Output: New locations of all chargers. 1: Step 1. Check the number of sensors covered by each charger position n. 2: Step 2. If the number of covered sensors decreases, the charger is rotated 360° to find the charging angle that can cover most of the sensors. 3: if then 4: Search 360° and find the best angle that can cover most of the sensors; 5: Record the best charger location and the covered sensors; 6: else 7: Record the covered sensors; 8: end if 9: Step 3. Check if any sensor is uncharged. 10: Step 4. If it is found that there are sensors being uncharged, increase the chargers at the position of this sensor, and then rotate 360° to find the best angle that covers the largest number of sensors. 11: if then 12: Add a new charger on the location of the sensor; 13: Search 360° and find the best angle that can cover most of the sensors; 14: Record the best charger location and the covered sensors; 15: end if 16: Step 5. Remove the excess chargers 17: if (the charger location is redundant) then 18: Remove the redundant charger location; 19: end if 20: return |
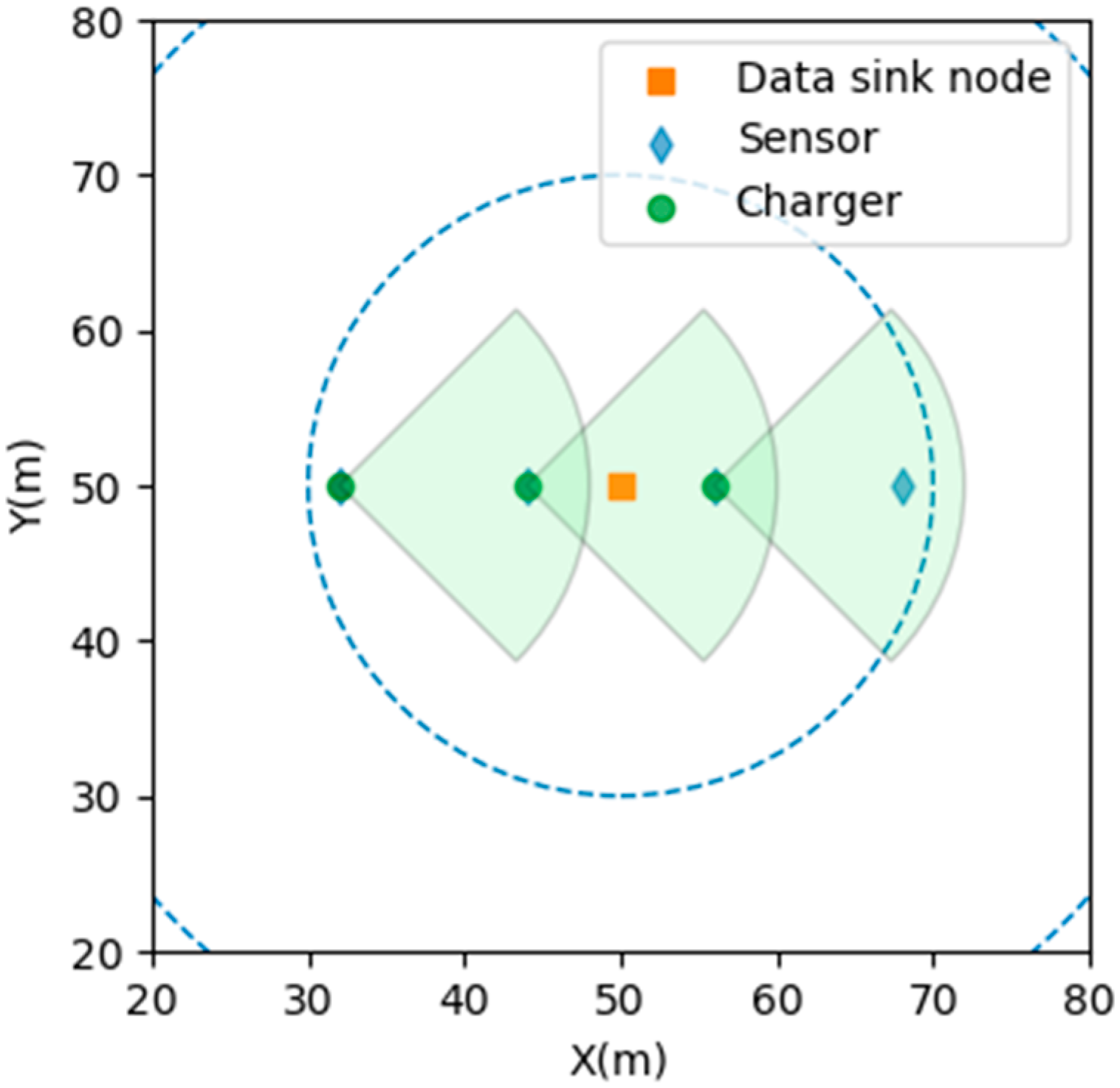
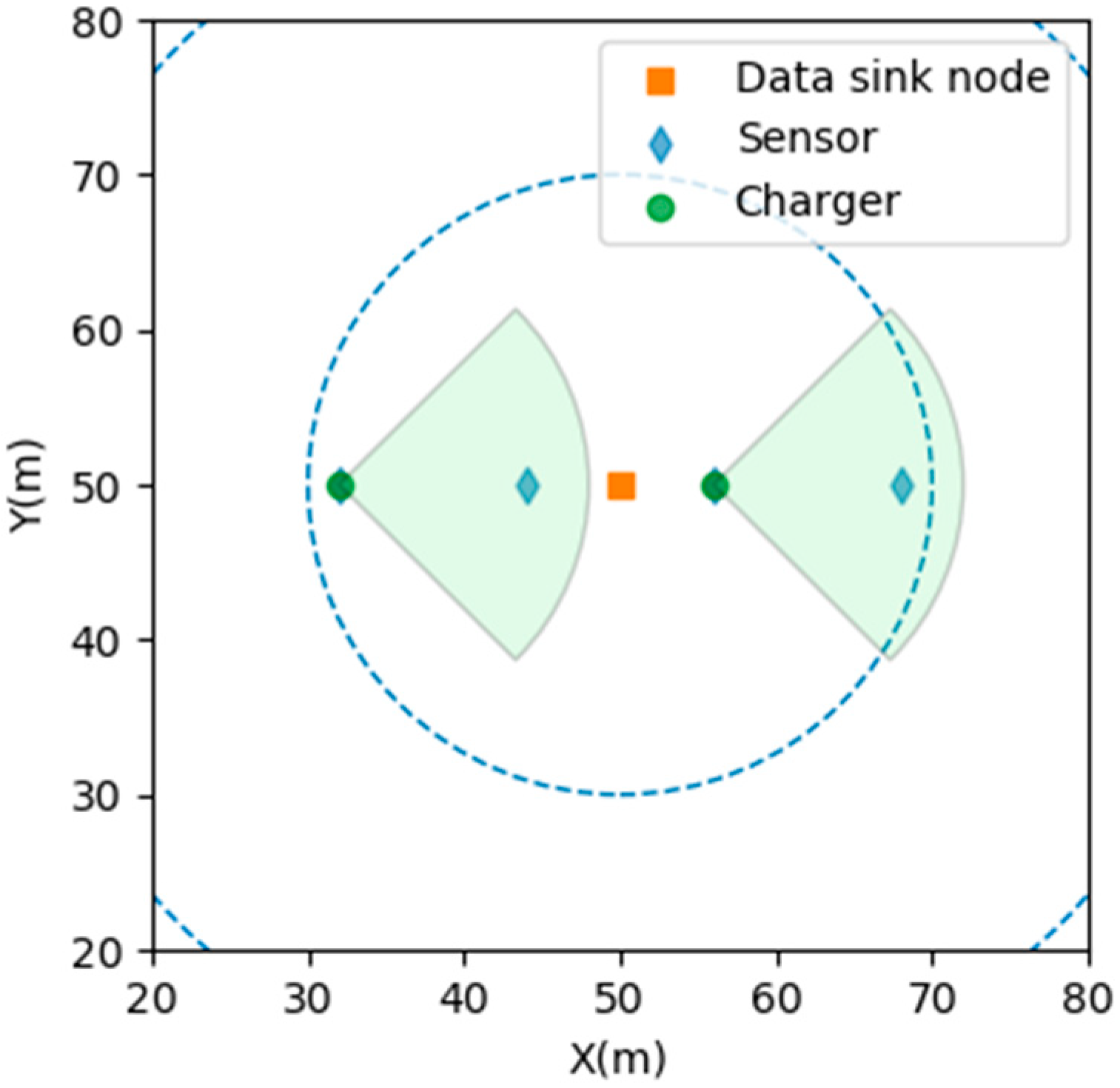
3.5. The Charging of Sink Nodes
| Algorithm 3 Charging energy of the sink nodes |
| Input: Locations of all sensors, locations of all chargers, and locations of all sinks Output: Locations of new chargers 1: Step 1 Check how much energy is consumed by each sink. 2: Step 2. Find the charger, and if its distance from the sink node is less than the charging distance r. 3: Step 3. If the number of sensors n covered by the charger is greater than one, rotate 360° to check whether the charging of the sink node can be increased without affecting the originally charged sensors. If possible, update the angle of the charger. If not, maintain the original charging angle of the charger. If the number of sensors n covered by the charger is equal to 1, then the charging angle of the charger is turned to the sink node. 4: if then 5: Search 360° and find the best angle that can cover most of the sensors; 6: Check whether the new covered number (ncn) is bigger than the original covered number (ocn); 7: if then 8: Record the new charging angle; 9: end if 10: else if then 11: Update charging angle; 12: end if 13: Step 4. Check the lack of energy for each sink node. Around the sink nodes, randomly select the position of the chargers to deploy the number of chargers needed to supplement the energy required by the sink nodes. 14: return |
4. Experiments and Results
4.1. Experimental Environment and Parameters
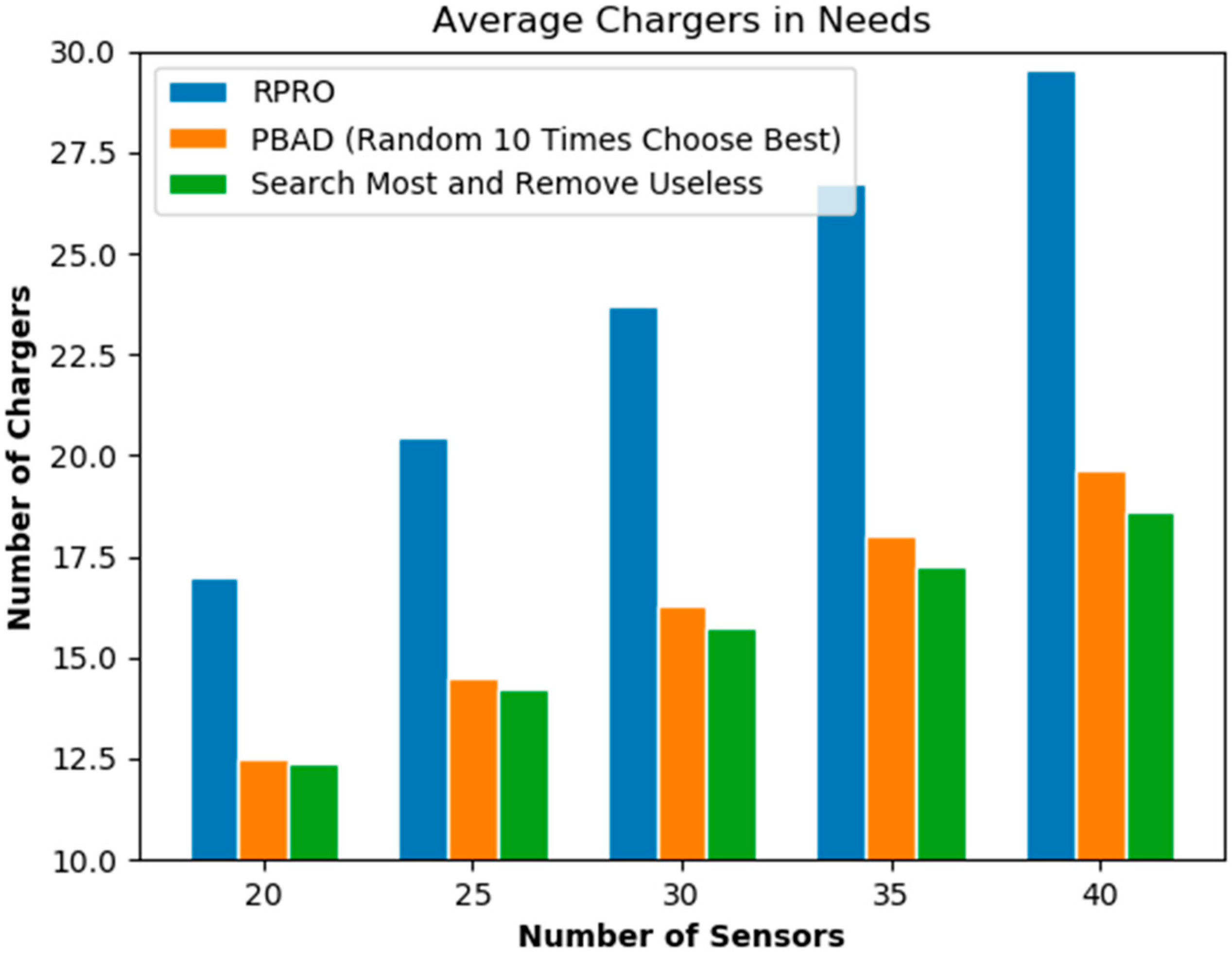
4.2. Experimental Results of the Number of Chargers
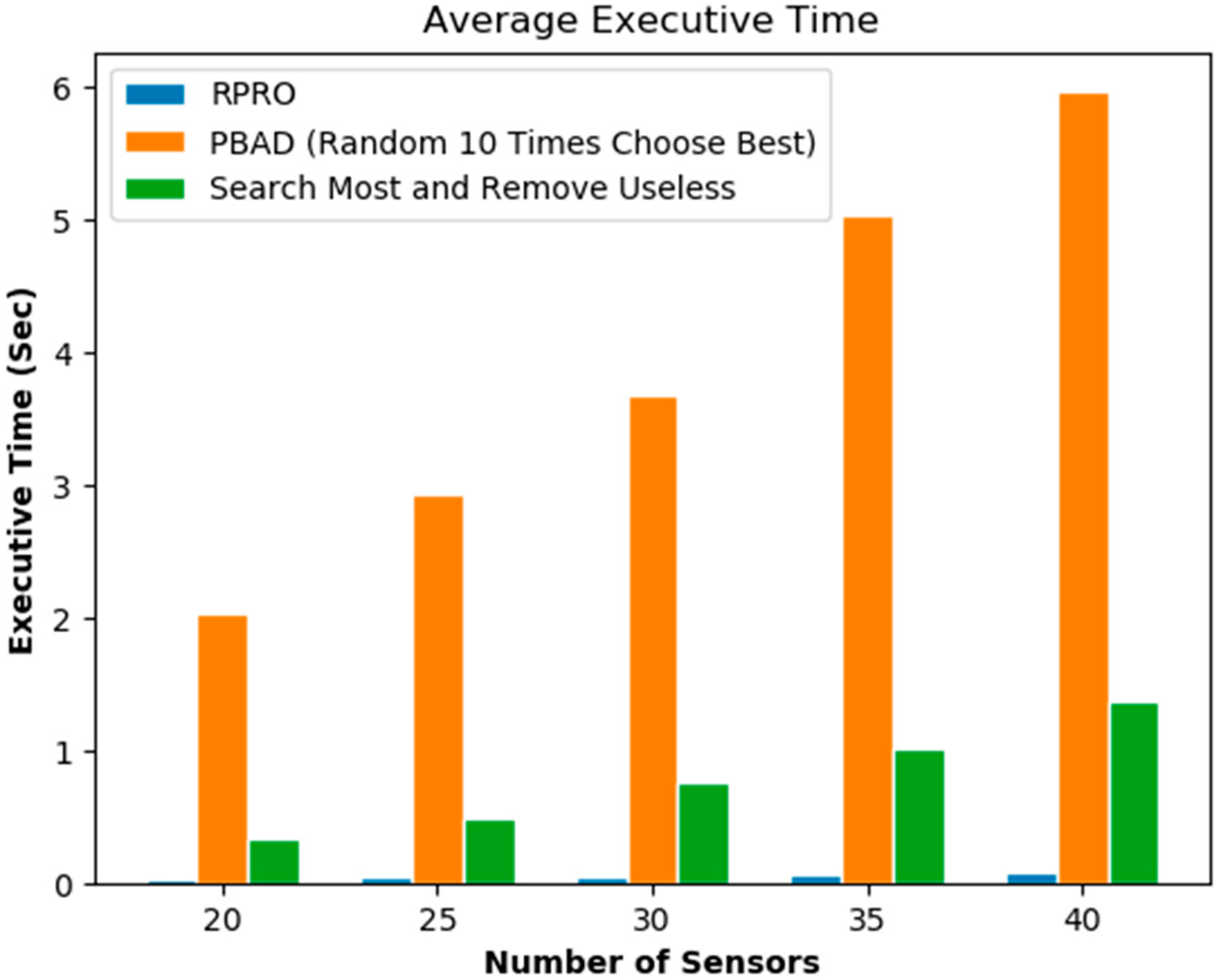
4.3. Experimental Results of Execution Time
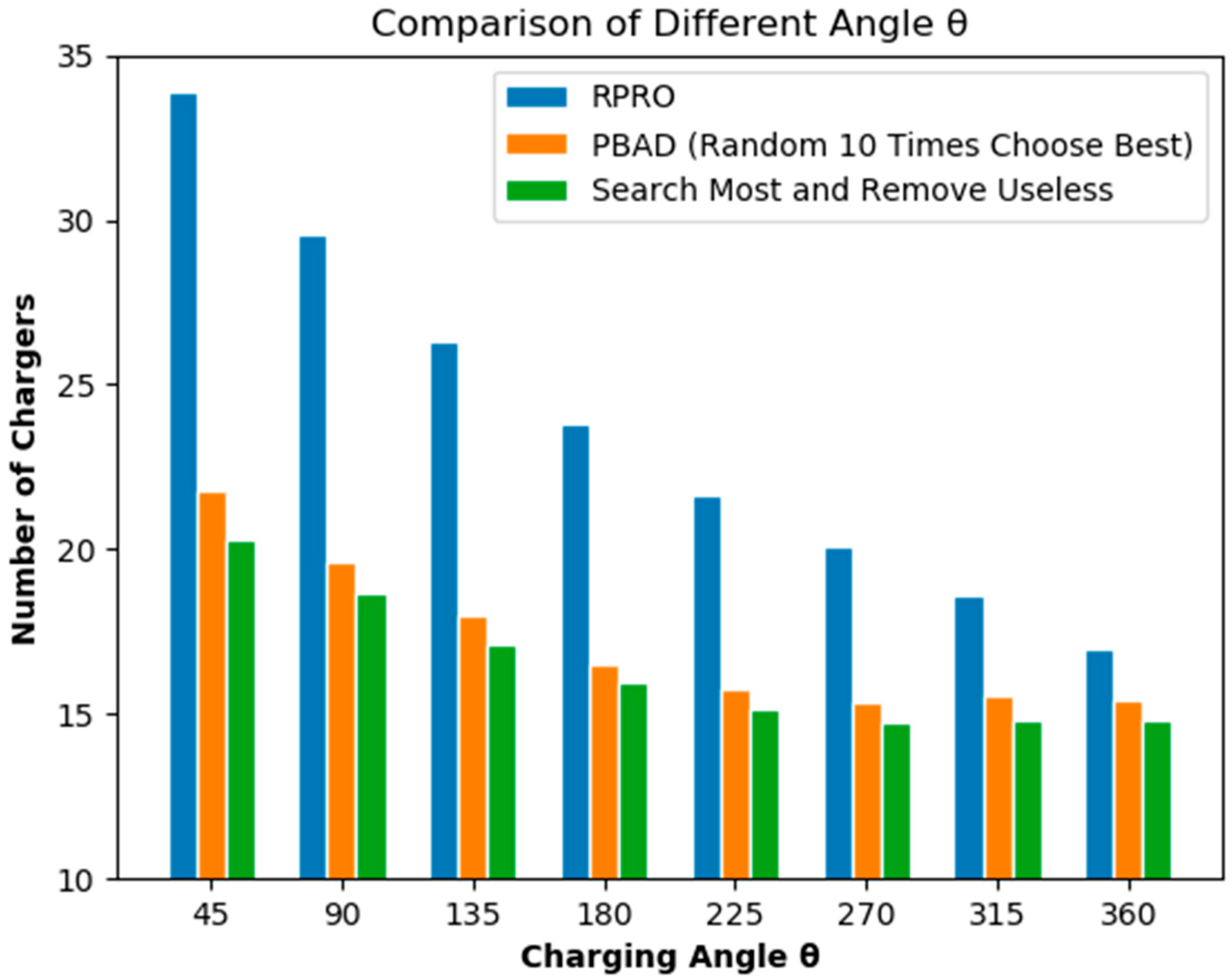
4.4. Experimental Results for Different Charging Angles
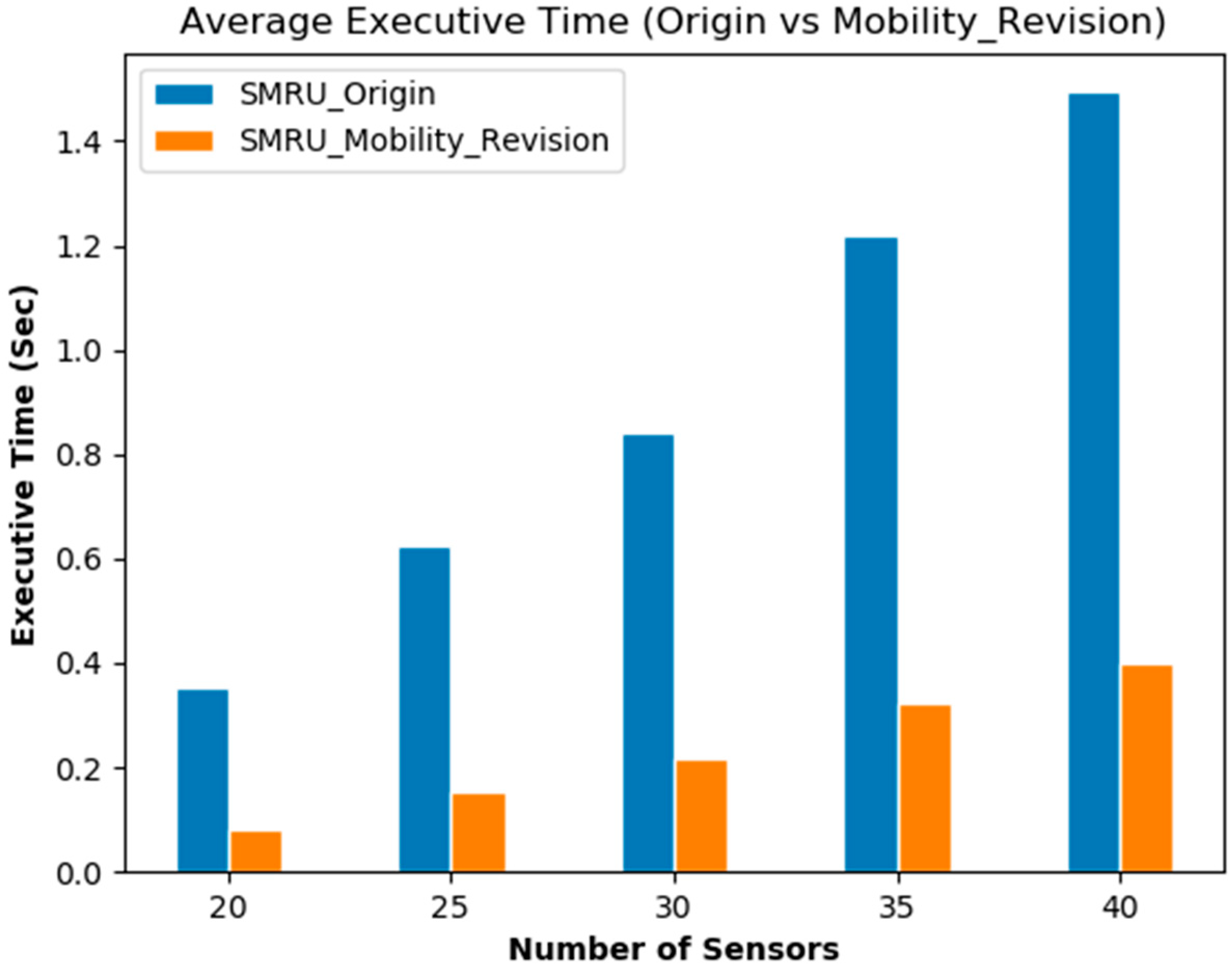
4.5. The Comparison of the Execution Time of Charger Deployment and Modified Deployment Using SMRU
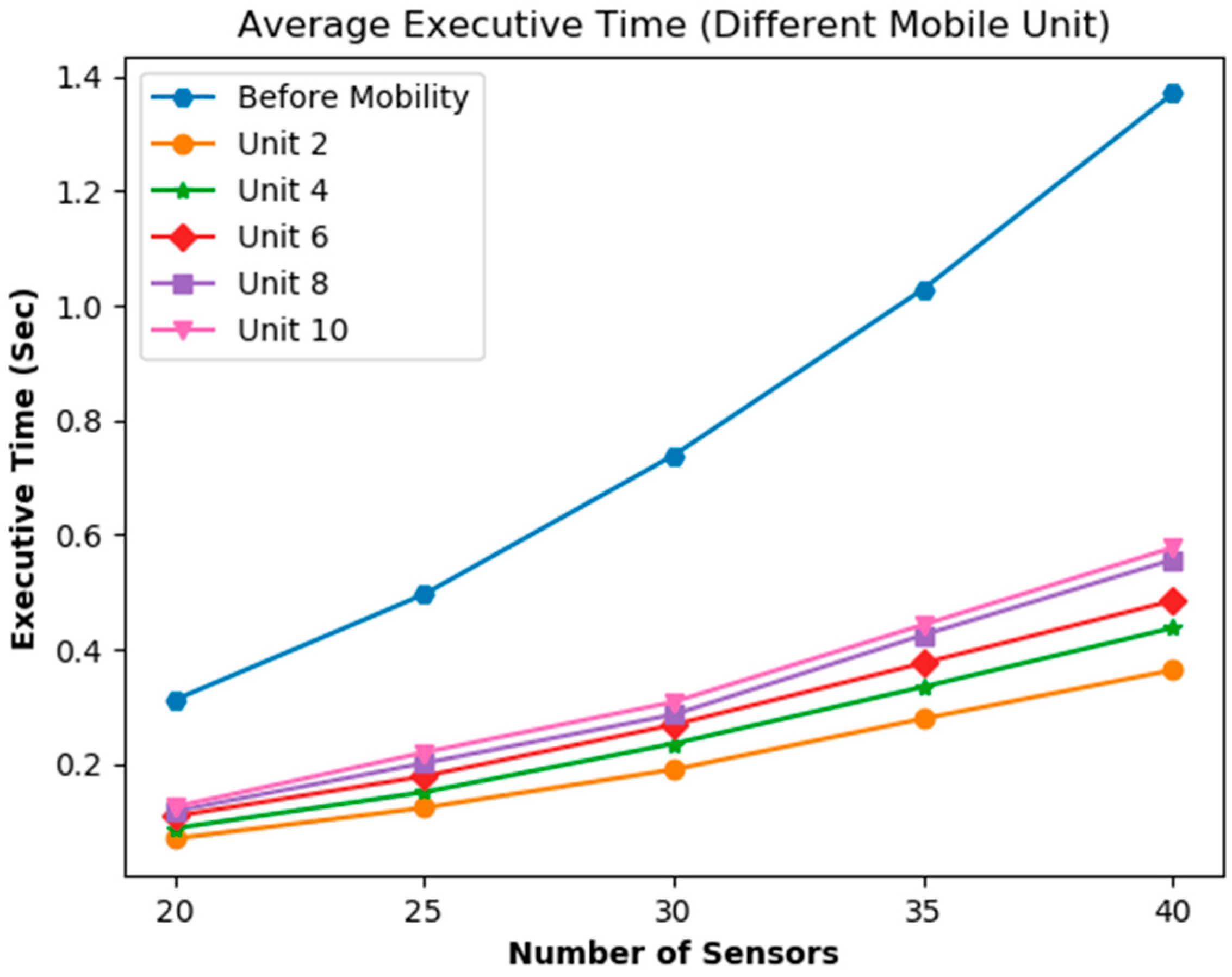
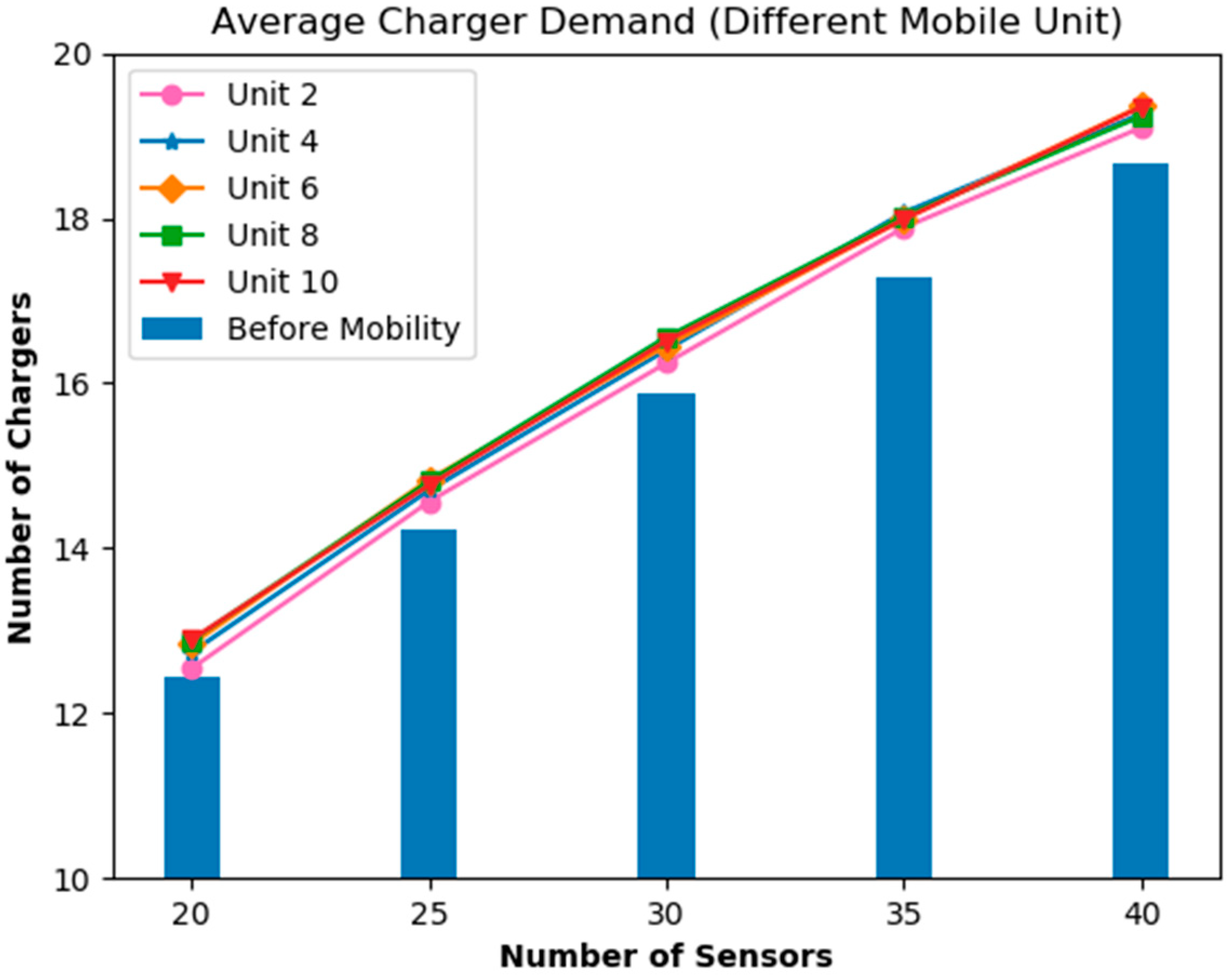
4.6. The Impact of Different Mobility Units
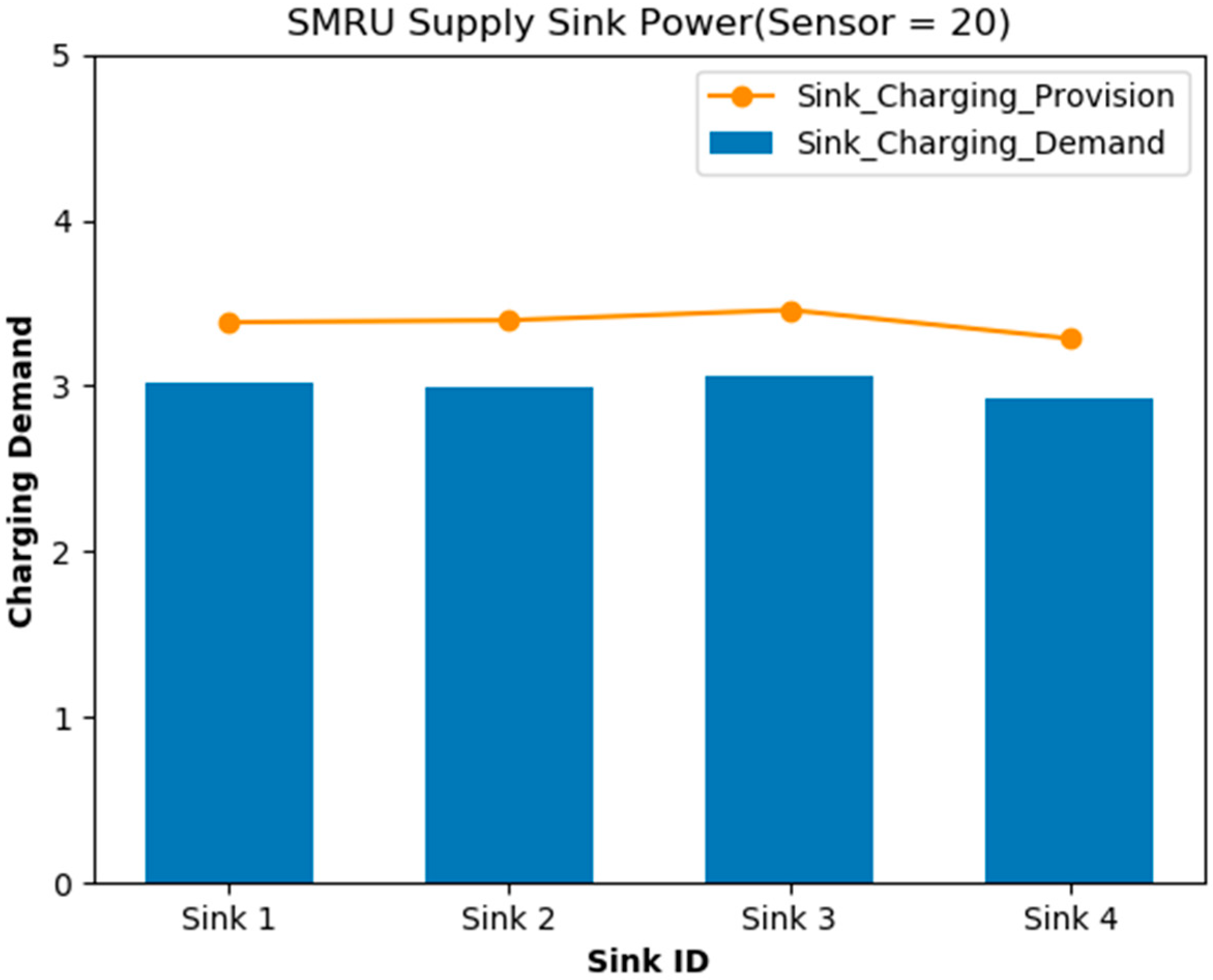
4.7. Energy Consumption and Supplementary of Sink Nodes with Different Sink Rates
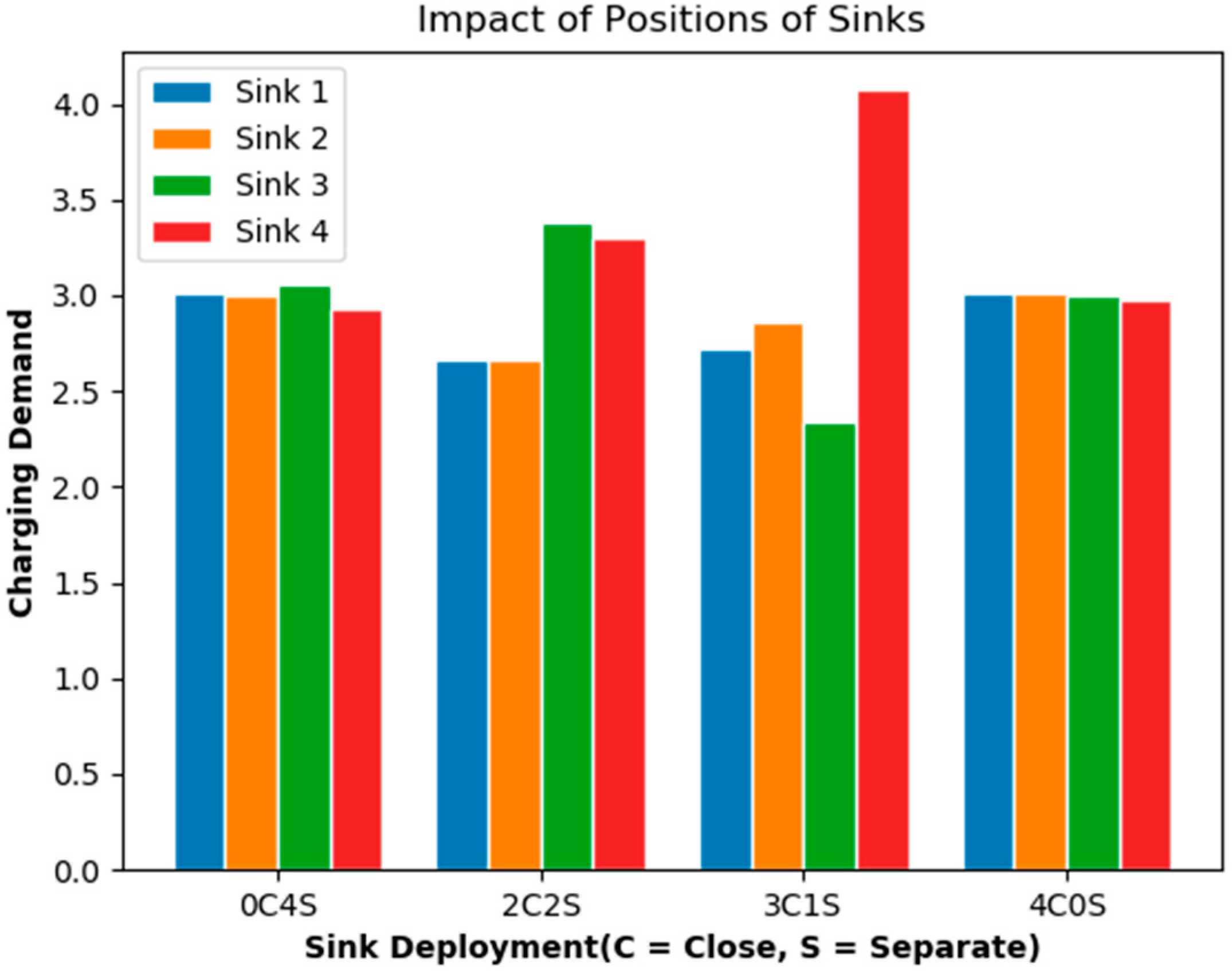
4.8. The Impact of Different Densities on the Energy Requirements of Sink Nodes
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pantazis, N.A.; Nikolidakis, S.A.; Vergados, D.D. Energy-Efficient Routing Protocols in Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2013, 15, 551–591. [Google Scholar] [CrossRef]
- Kausar, A.S.M.Z.; Reza, A.W.; Saleh, M.U.; Ramiah, H. Energy-Harvesting wireless sensor networks. Renew. Sustain. Energy Rev. 2014, 38, 973–989. [Google Scholar] [CrossRef]
- Sample, A.P.; Meyer, D.T.; Smith, J.R. Analysis, Experimental Results, and Range Adaptation of Magnetically Coupled Resonators for Wireless Power Transfer. IEEE Trans. Ind. Electron. 2010, 58, 544–554. [Google Scholar] [CrossRef]
- Global Wireless Charging Market 2016–2020. 2015. Available online: http://www.prnewswire.com/news-releases/global-wireless-charging-market-2016-2020-300196623.html (accessed on 31 July 2016).
- Gilbert, D. WiFi Routers Can Wirelessly Charge Batteries, Cameras and Sensors. 2015. Available online: http://www.ibtimes.co.uk/wifi-routers-can-wirelessly-charge-batteries-cameras-sensors-1504987 (accessed on 31 July 2016).
- Sendra, S.; Lloret, J.; Garcia, M.; Toledo, J.F. Power Saving and Energy Optimization Techniques for Wireless Sensor Neworks. J. Commun. 2011, 6, 439–459. [Google Scholar] [CrossRef]
- Liao, J.-H. Wireless Charger Deployment Optimization for Wireless Rechargeable Sensor Networks. In Proceedings of the 2014 7th International Conference on Ubi-Media Computing and Workshops, Ulaanbaatar, Mongolia, 12–14 July 2013. [Google Scholar]
- Horster, E.; Lienhart, R. Approximating optimal visual sensor placement. In Proceedings of the 2006 IEEE International Conference on Multimedia and Expo, Toronto, Canada, 9–12 July 2006. [Google Scholar]
- Ai, J.; Abouzeid, A.A. Coverage by directional sensors in randomly deployed wireless sensor networks. J. Comb. Optim. 2006, 11, 21–41. [Google Scholar] [CrossRef]
- Lin, T.L.; Li, S.L.; Chang, H.Y.J.E. A power balance aware wireless charger deployment method for complete coverage in wireless rechargeable sensor networks. Energies 2016, 9, 695. [Google Scholar] [CrossRef]
- Dai, H.; Liu, Y.; Chen, G.; Wu, X.; He, T.; Liu, A.X.; Ma, H. Safe charging for wireless power transfer. Tech. Rep. 2017, 25, 3531–3544. [Google Scholar] [CrossRef]
- He, S.; Chen, J.; Jiang, F.; Yau, D.K.Y.; Xing, G.; Sun, Y. Energy provisioning in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2013, 2, 1931–1942. [Google Scholar] [CrossRef]
- Chiu, T.C.; Shih, Y.Y.; Pang, A.C.; Jeng, J.Y.; Hsiu, P.C. Mobility-Aware charger deployment for wireless rechargeable sensor networks. In Proceedings of the 2012 14th Asia-Pacific Network Operations and Management Symposium (APNOMS), Seoul, Korea, 25–27 September 2012. [Google Scholar]
- Han, X.; Cao, X.; Lloyd, E.L.; Shen, C.C. Deploying directional sensor networks with guaranteed connectivity and coverage. In Proceedings of the 2008 5th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Francisco, CA, USA, 16–20 June 2008. [Google Scholar]
- Garey, M.R.; Johnson, D.S. Computers and Intractibility: A Guide to the Theory of NP-Completeness; W. H. Freeman & Co.: New York, NY, USA, 1979. [Google Scholar]
- Mo, L.; Kritikakou, A.; He, S. Energy-Aware Multiple Mobile Chargers Coordination for Wireless Rechargeable Sensor Networks. IEEE Internet Things J. 2019, 6, 8202–8214. [Google Scholar] [CrossRef]
- Tang, L.; Guo, H.; Wu, R.; Fan, B. Adaptive Dual-Mode Routing-Based Mobile Data Gathering Algorithm in Rechargeable Wireless Sensor Networks for Internet of Things. Appl. Sci. 2020, 10, 1821. [Google Scholar] [CrossRef]
- Chen, J.; Yu, C.W.; Ouyang, W. Efficient Wireless Charging Pad Deployment in Wireless Rechargeable Sensor Networks. IEEE Access 2020, 8, 39056–39077. [Google Scholar] [CrossRef]
- Sumi, F.; Dutta, L.; Sarker, F. Future with Wireless Power Transfer Technology. J. Electr. Electron. Syst. 2018, 7, 2332-0796.1000279. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Sensor or Charger | Charging Type | Important Concepts | Balanced Battery Power Distribution |
|---|---|---|---|---|
| He et al., (2012) [12] | Charger | Omnidirectional |
| No |
| Chiu et al., (2012) [13] | Charger | Omnidirectional |
| No |
| Liao et al., (2013) [7] | Charger | Omnidirectional |
| No |
| Horster and Lienhart., (2006) [8] | Sensor | Directional |
| No |
| Han et al., (2008) [14] | Sensor | Directional |
| No |
| Lin et al., (2016) [10] | Charger | Directional and Omnidirectional |
| Yes |
| Mo et al. (2019) [16] | Charger | Omnidirectional |
| No |
| Tang et al., (2020) [17] | Charger | Omnidirectional |
| Yes |
| Chen et al., (2020) [18] | Charger | Drone |
| No |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, T.-L.; Chang, H.-Y.; Wang, Y.-H. A Novel Hybrid Search and Remove Strategy for Power Balance Wireless Charger Deployment in Wireless Rechargeable Sensor Networks. Energies 2020, 13, 2661. https://doi.org/10.3390/en13102661
Lin T-L, Chang H-Y, Wang Y-H. A Novel Hybrid Search and Remove Strategy for Power Balance Wireless Charger Deployment in Wireless Rechargeable Sensor Networks. Energies. 2020; 13(10):2661. https://doi.org/10.3390/en13102661
Chicago/Turabian StyleLin, Tu-Liang, Hong-Yi Chang, and Yu-Hsin Wang. 2020. "A Novel Hybrid Search and Remove Strategy for Power Balance Wireless Charger Deployment in Wireless Rechargeable Sensor Networks" Energies 13, no. 10: 2661. https://doi.org/10.3390/en13102661
APA StyleLin, T.-L., Chang, H.-Y., & Wang, Y.-H. (2020). A Novel Hybrid Search and Remove Strategy for Power Balance Wireless Charger Deployment in Wireless Rechargeable Sensor Networks. Energies, 13(10), 2661. https://doi.org/10.3390/en13102661