Leveraging Cell Expansion Sensing in State of Charge Estimation: Practical Considerations



Abstract
1. Introduction
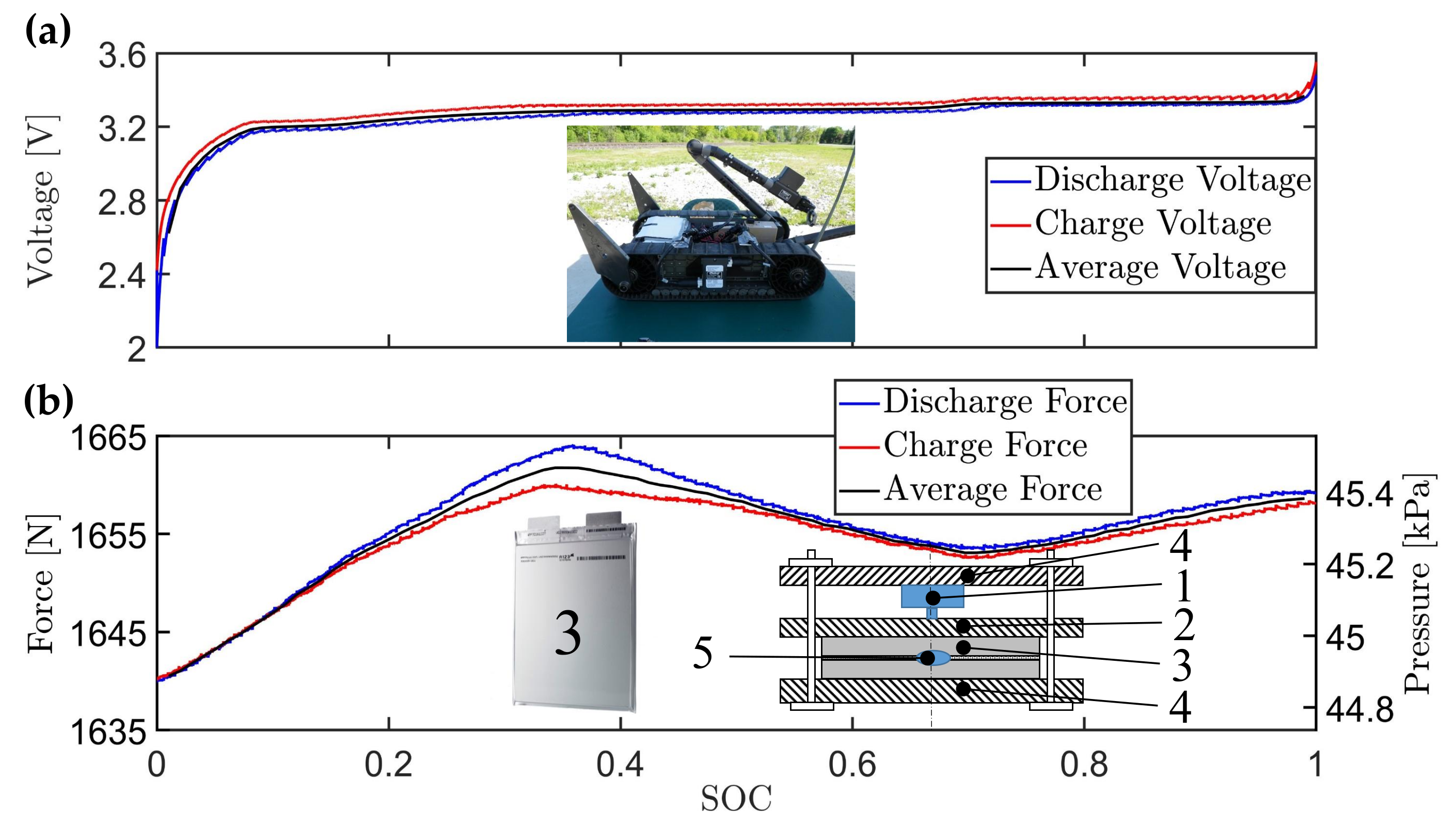
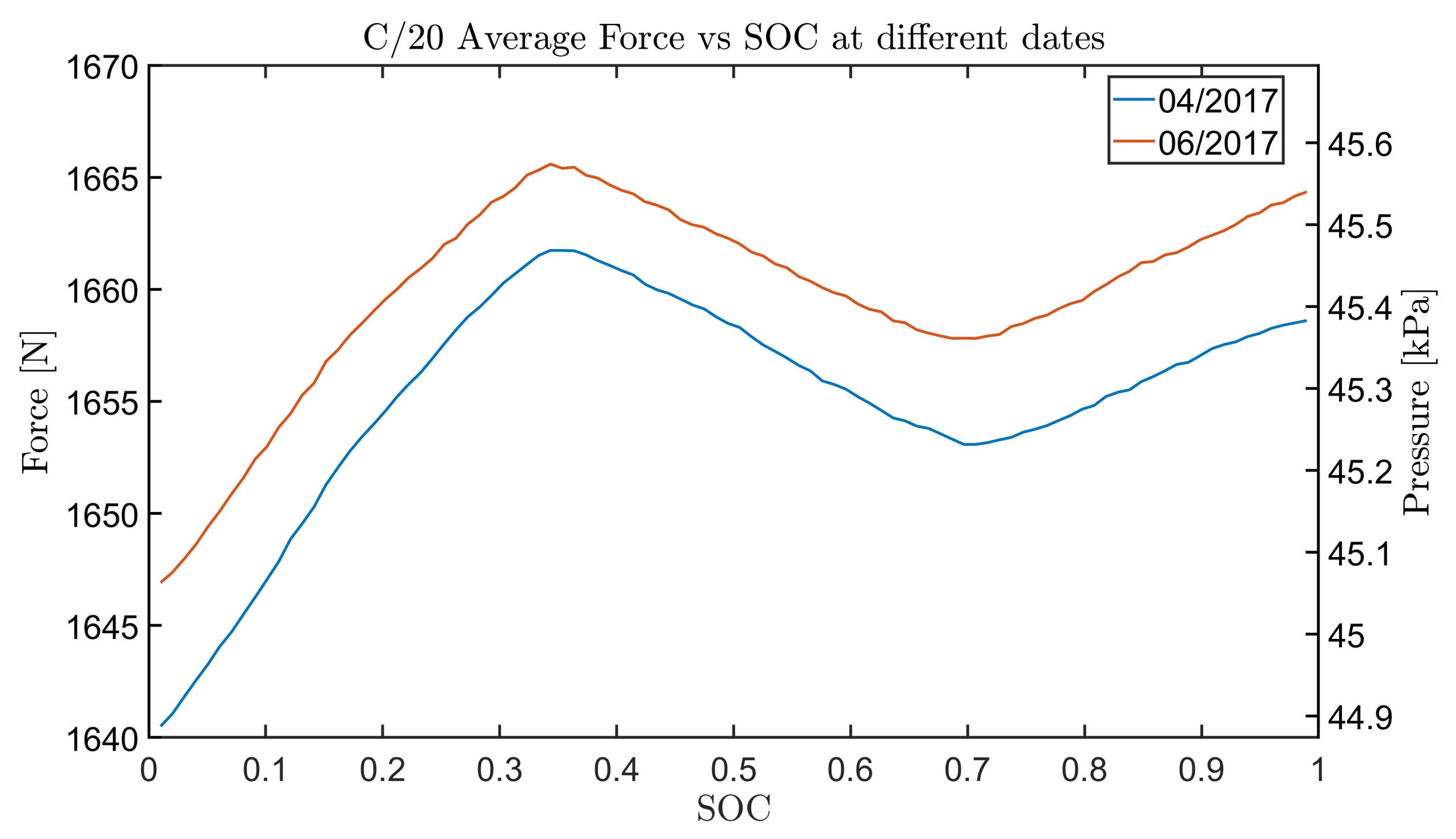
2. Experimental Setup and Force Behavior
3. Simulation Model
3.1. Cell Swelling Force Model
3.2. Terminal Voltage Model
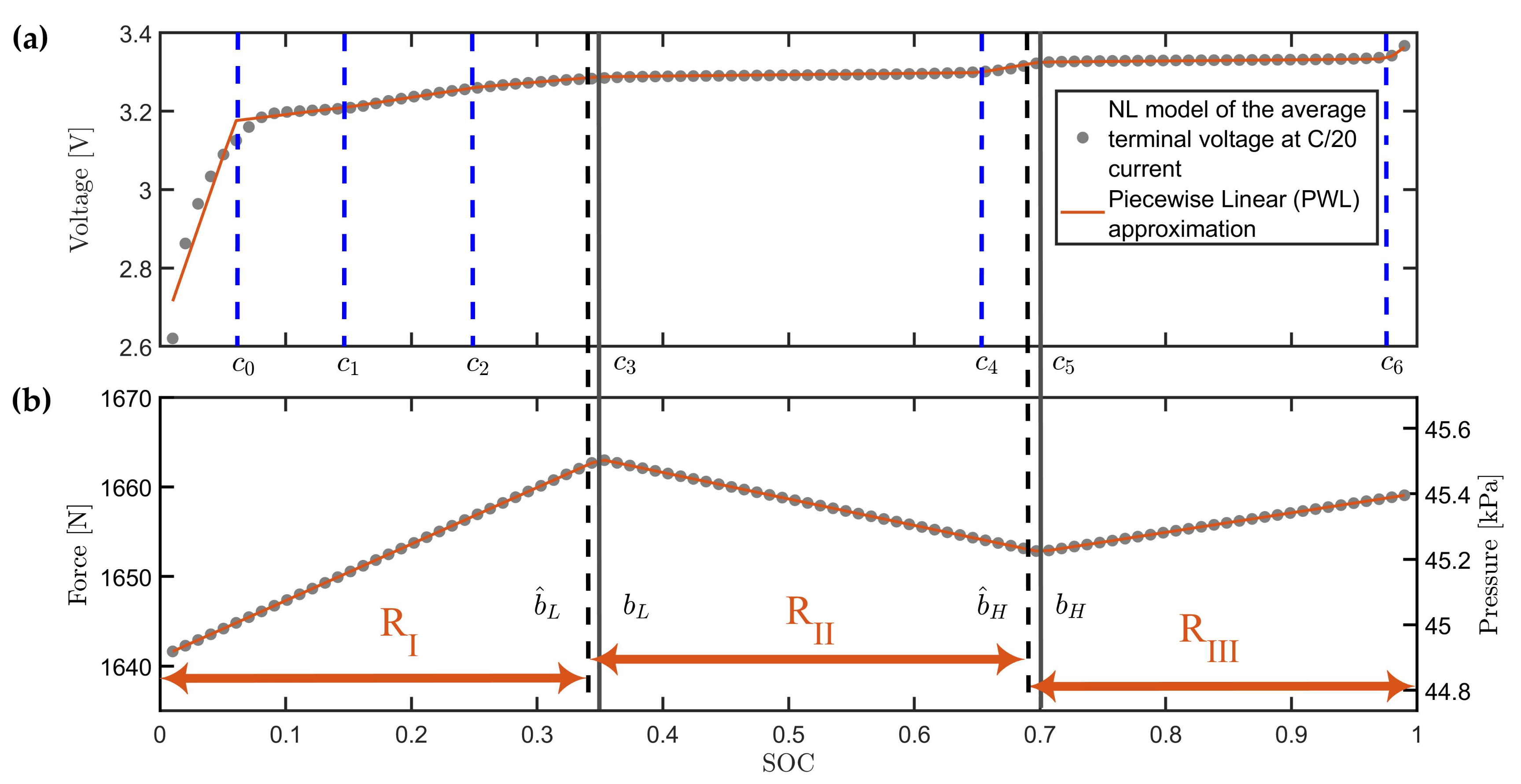
4. Voltage Model Parameterization
5. SOC Estimation Model
5.1. Voltage Only Observer Design
5.2. Voltage and Force Observer Design
Switching Logic in Observer Design
- (a)
- the modeled slope from Equation (18) of the F–SOC relation based on the estimated state ; and
- (b)
- the estimation of the slope by using the measured force with respect to the Coulomb counting based SOC, (DFDZ).
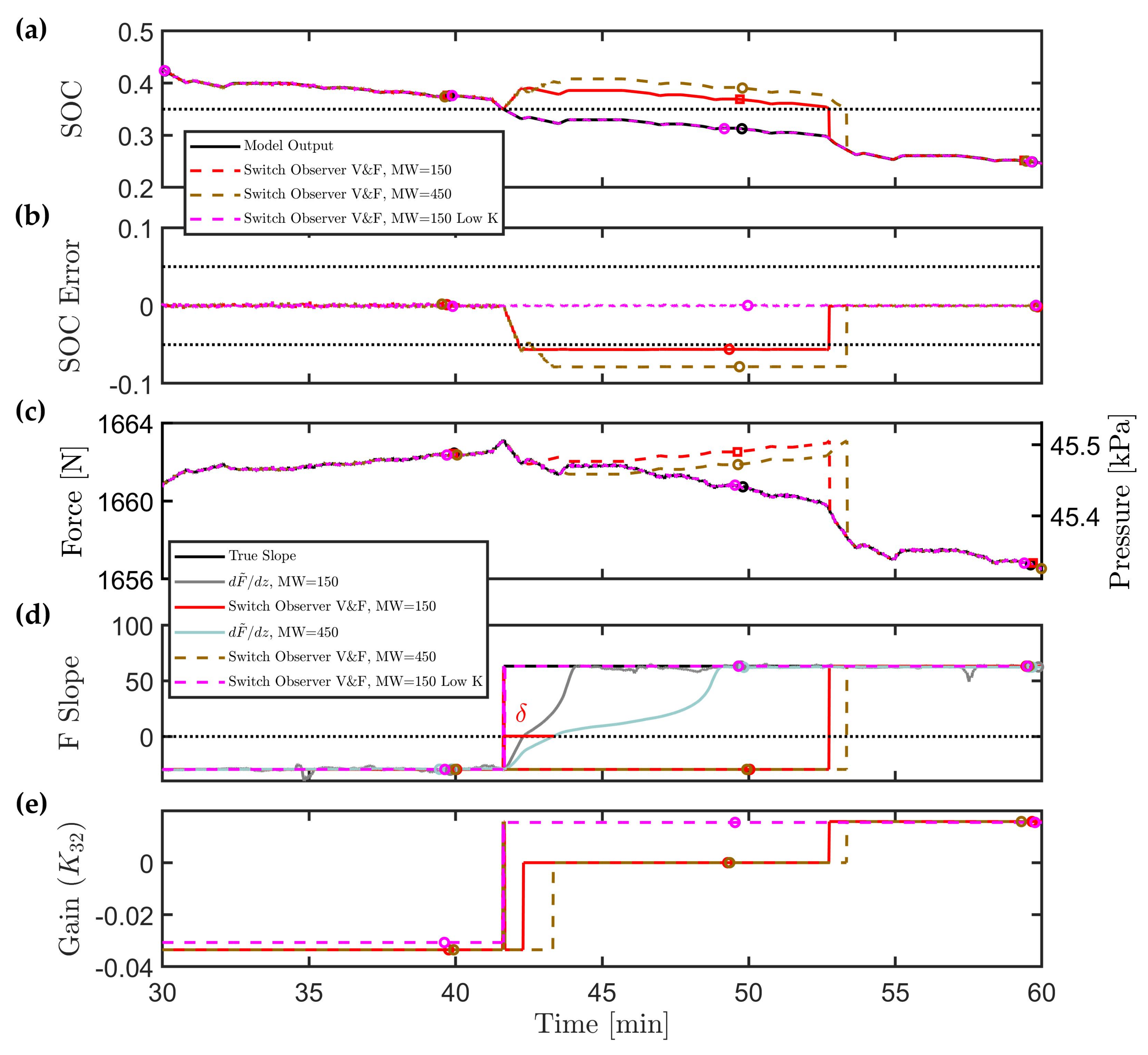
5.3. SOC Estimation Error during Switching
5.4. Bias Influence in SOC Estimation
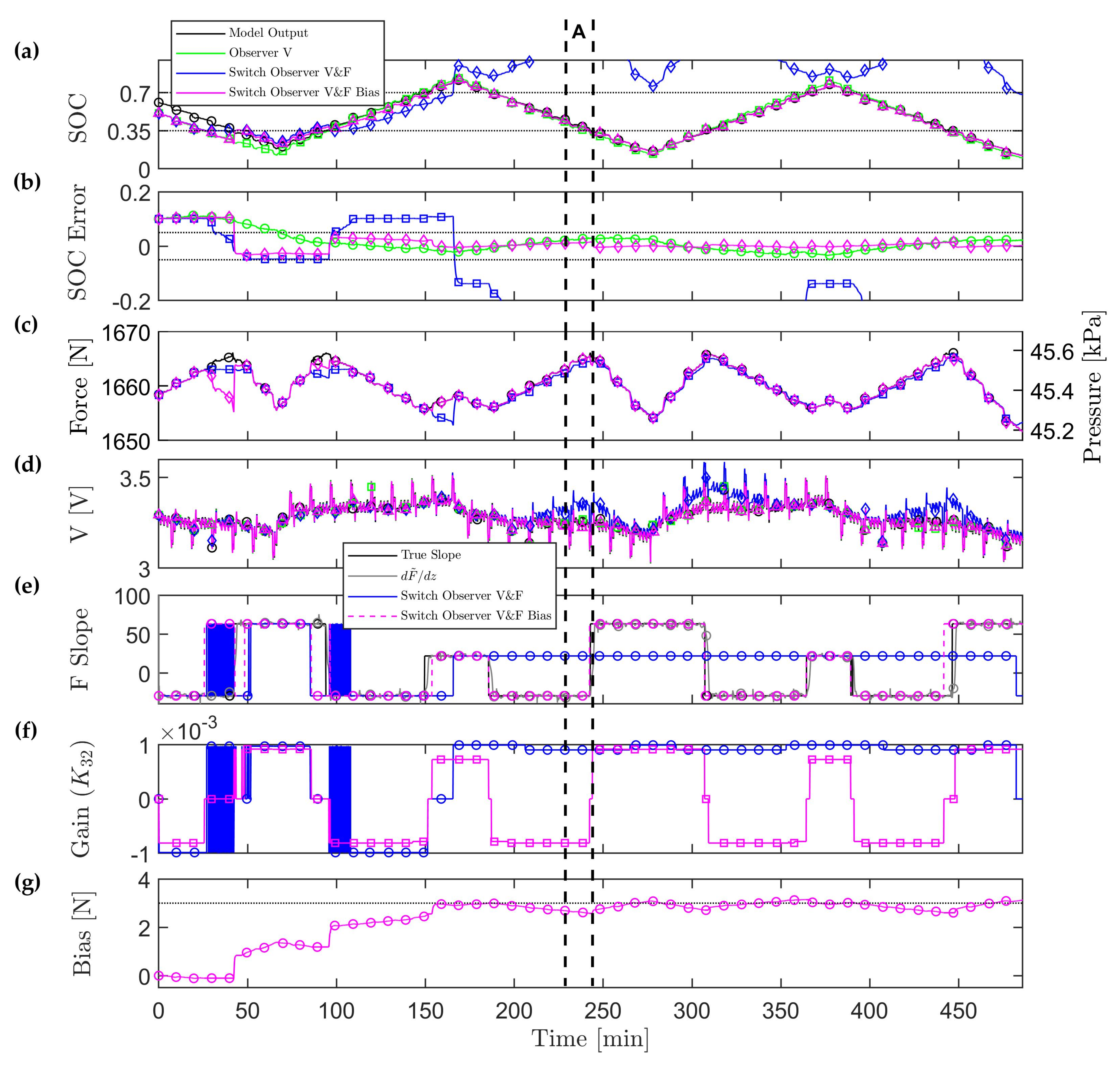
6. Simulation Results without Model Mismatch in F–SOC and OCV–SOC
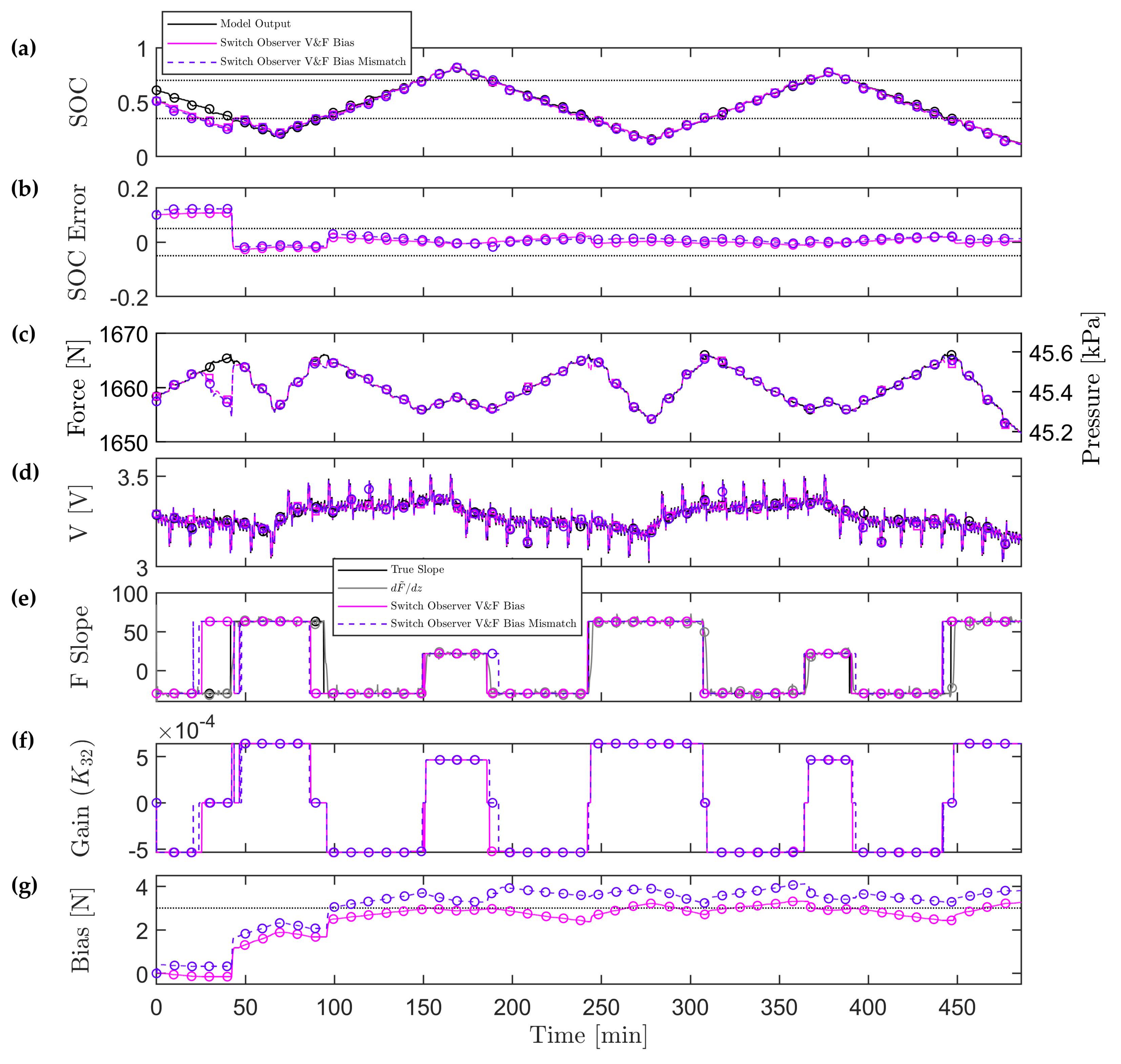
7. Simulation Results with Inflection Point Mismatch in F–SOC and OCV–SOC
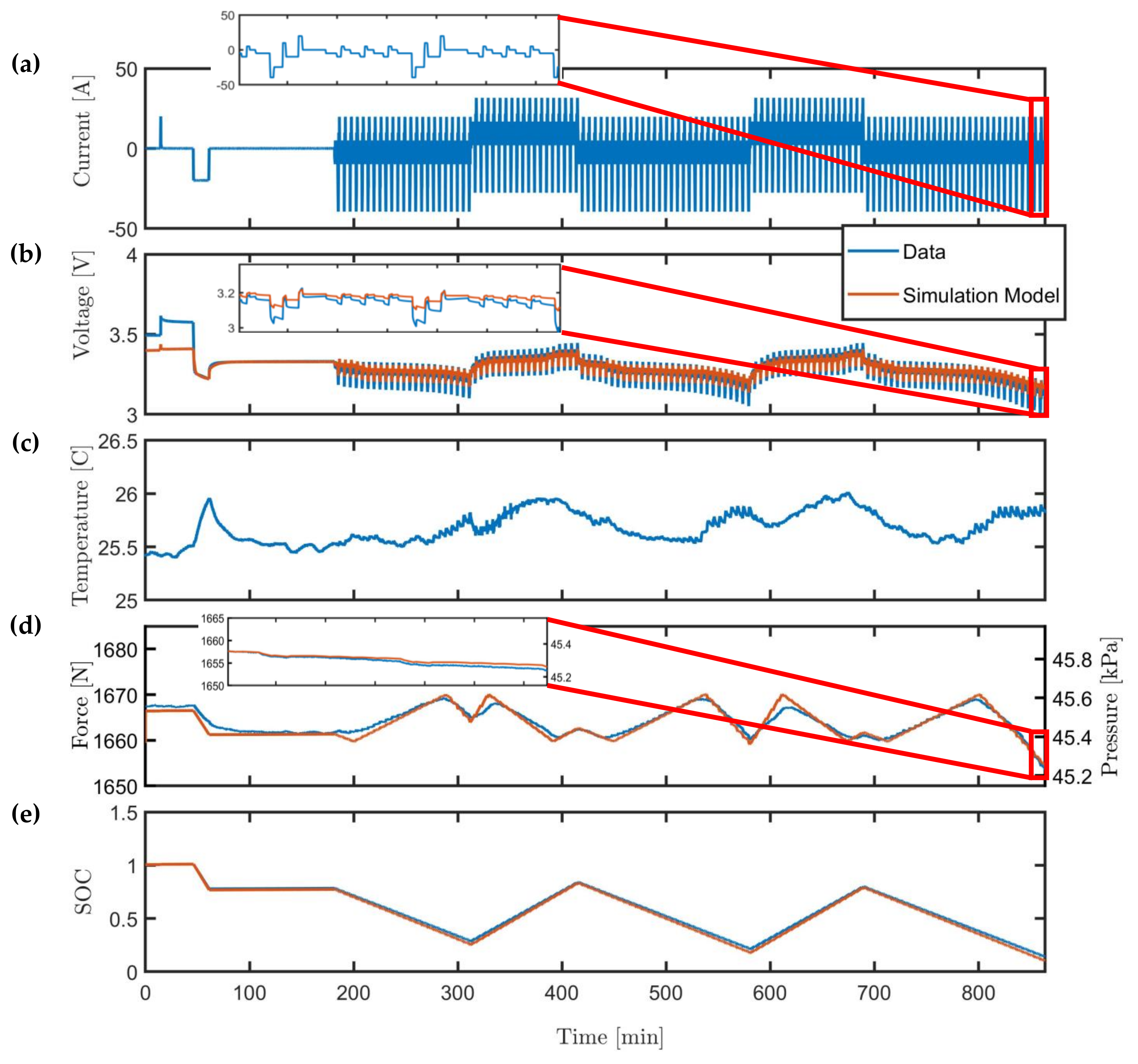
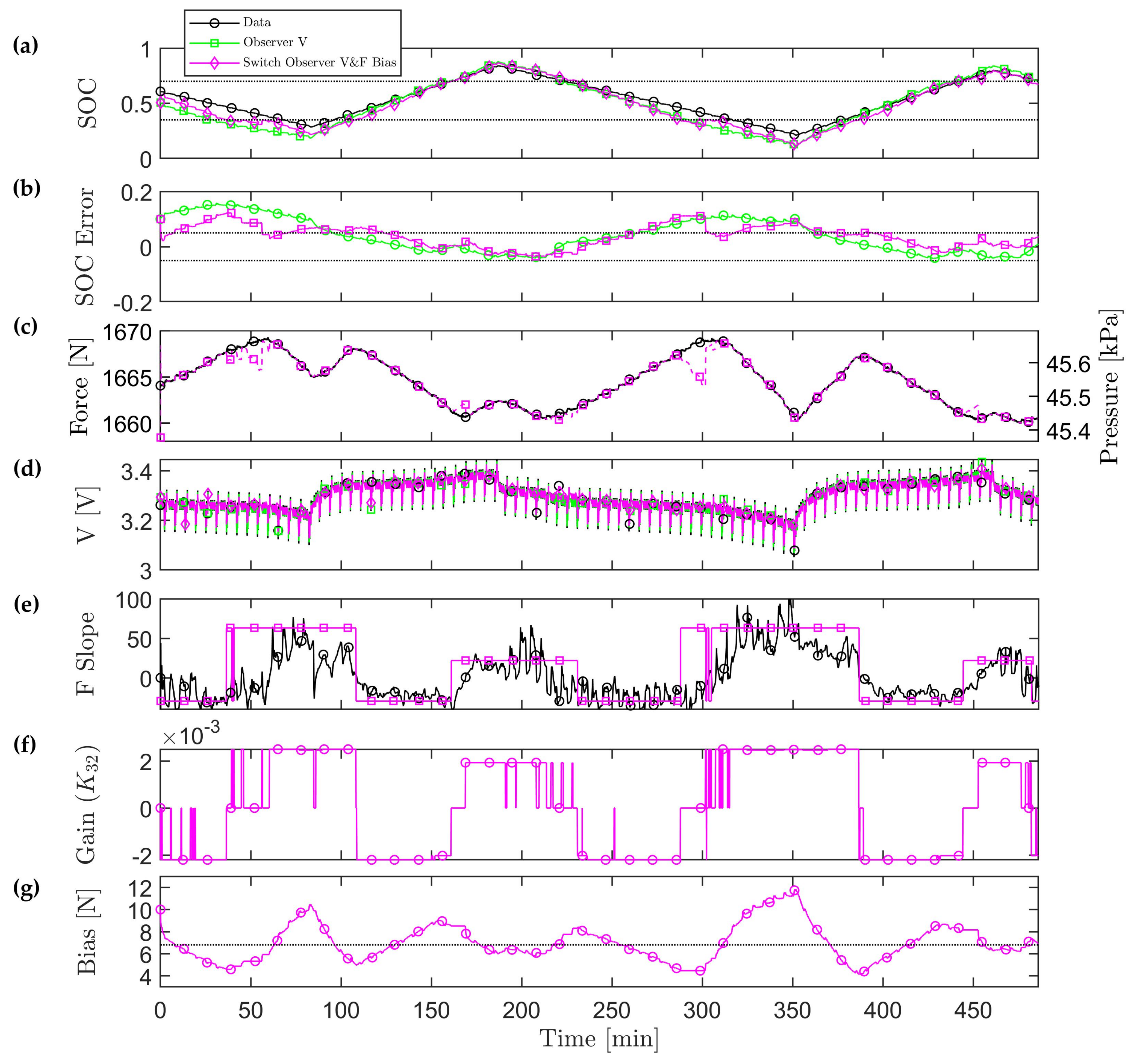
8. Experimental Data Results Using F–SOC and OCV–SOC
9. Conclusions
10. Disclaimer
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| V | terminal voltage |
| SOC, z | state of charge |
| LFP | lithium ion iron phosphate |
| F | force |
| LQE | linear quadratic estimator |
| DST | Dynamic Stress Test |
| BMS | battery management system |
| Ah | ampere-hours |
| UAV | unmanned air vehicles |
| OCV | open circuit voltage |
| NMC | nickel manganese cobalt |
| SOH | state of health |
| PWL | piecewise linear |
| CCCV | Constant-Current/Constant-Voltage |
| DFDZ | force derivative or slope of the measured force with respect to the SOC |
| N | Newton |
| EEB | estimation error bound |
| Max | maximum |
| RMS | root mean square |
| RMSE | root mean square error |
| RTDs | resistance temperature detectors |
| DARE | Discrete Algebraic Riccati Equation |
| MW | moving window |
| HEV | hybrid electric vehicle |
| EV | electric vehicle |
| HPPC | Hybrid Pulse Power Characterization |
Appendix A. Voltage Hysteresis State H Function

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| 8662.54 | 319,201.70 | 9255.46 | |||
| −57,939.63 | −234,698.07 | −1381.64 | |||
| 170,685.13 | 117,809.10 | 127.23 | |||
| −291,398.86 | −40,316.61 | −6.53 | |||
| 0.16 |
Appendix B. Discrete Terminal Voltage Model
Appendix C. Force and OCV Function Values that Represent Average Data
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| 63.11 | 21.78 | 0.34 | |||
| 1641 | 0.35 | 0.69 | |||
| −29.53 | 0.7 |
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| −2.4354 | 0.0206 | 0.0166 | |||
| d | 0.1162 | 0.2321 | 0.6799 | ||
| f | 5.7469 | 0.0626 | 0.0306 | ||
| h | 1.2942 | 5.6185 | |||
| k | 3.0014 | −0.0513 | |||
| g | −0.0098 | 0.0406 |
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| 9.232 | 0.02836 | 0.35 | |||
| 2.622 | 2.264 | 0.6511 | |||
| 0.3899 | 0.03506 | 0.7 | |||
| 0.4922 | 0.06 | 0.9767 | |||
| 0.2724 | 0.1516 | ||||
| 0.5515 | 0.2528 |
References
- Cheng, K.W.E.; Divakar, B.P.; Wu, H.; Ding, K.; Fai, H. Battery-Management System (BMS) and SOC Development for Electrical Vehicles. IEEE Trans. Veh. Technol. 2011, 60, 76–88. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Ojha, U.; Baronti, F.; Chow, M.Y. Battery Management System: An Overview of Its Application in the Smart Grid and Electric Vehicles. IEEE Ind. Electron. Mater. 2013, 7, 4–16. [Google Scholar] [CrossRef]
- Chen, Z.; Fu, Y.; Mi, C. State of Charge Estimation of Lithium-Ion Batteries in Electric Drive Vehicles Using Extended Kalman Filtering. IEEE Trans. Veh. Technol. 2013, 62, 1020–1030. [Google Scholar] [CrossRef]
- Zubi, G.; Dufo-López, R.; Carvalho, M.; Pasaogluc, G. The lithium-ion battery: State of the art and future perspectives. Renew. Sustain. Energy Rev. 2018, 89, 292–308. [Google Scholar] [CrossRef]
- Satyavani, T.V.S.L.; Kumar, A.S.; Rao, P.S. Methods of synthesis and performance improvement of lithium iron phosphate for high rate Li-ion batteries: A review. Int. J. Eng. Sci. Technol. 2016, 19, 178–188. [Google Scholar] [CrossRef]
- Malik, R.; Abdellahi, A.; Ceder, G. A critical review of the Li insertion mechanisms in LiFePO4 electrodes. J. Electrochem. Soc. 2013, 160, A3179. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Evaluation on State of Charge Estimation of Batteries With Adaptive Extended Kalman Filter by Experiment Approach. IEEE Trans. Veh. Technol. 2013, 62, 108–117. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.; Li, X.; Chen, W.; Yin, G.; Jiang, J. Robust and Adaptive Estimation of State of Charge for Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2015, 62, 4948–4957. [Google Scholar] [CrossRef]
- Mohan, S.; Kim, Y.; Stefanopoulou, A. On Improving Battery State of Charge Estimation Using Bulk Force Measurements. In Proceedings of the ASME 2015 Dynamic Systems and Control Conference, Columbus, OH, USA, 28–30 October 2015. [Google Scholar]
- Jones, E.M.C.; Silberstein, M.N.; White, S.R.; Sottos, N.R. In Situ Measurements of Strains in Composite Battery Electrodes during Electrochemical Cycling. Exp. Mech. 2014, 54, 971–985. [Google Scholar] [CrossRef]
- Cannarella, J.; Leng, C.Z.; Arnold, C.B. On the Coupling between Stress and Voltage in Lithium-Ion Pouch Cells. In Proceedings of the SPIE Sensing Technology + Applications Energy Harvesting and Storage: Materials, Devices, and Applications, Baltimore, MD, USA, 5–9 May 2014. [Google Scholar]
- Oh, K.; Siegel, J.; Secondo, L.; Kim, S.; Samad, N.; Qin, J.; Anderson, D.; Garikipati, K.; Knobloch, A.; Epureanu, B.; et al. Rate Dependence of Swelling in Lithium-Ion Cells. J. Power Sources 2014, 267, 197–202. [Google Scholar] [CrossRef]
- Mohan, S.; Kim, Y.; Siegel, J.B.; Samad, N.A.; Stefanopoulou, A.G. A phenomenological model of bulk force in a li-ion battery pack and its application to state of charge estimation. J. Electrochem. Soc. 2014, 161, A2222–A2231. [Google Scholar] [CrossRef]
- Samad, N.A.; Kim, Y.; Siegel, J.B.; Stefanopoulou, A.G. Battery capacity fading estimation using a force-based incremental capacity analysis. J. Electroche. Soc. 2016, 163, A1584–A1594. [Google Scholar] [CrossRef]
- Mohtat, P.; Lee, S.; Siegel, J.B.; Stefanopoulou, A.G. Towards Better Estimability of Electrode-Specific State of Health: Decoding the Cell Expansion. J. Power Sources 2019, 427, 101–111. [Google Scholar] [CrossRef]
- PORON® 4701-30 Polyurethane. Available online: https://rogerscorp.com/elastomeric-material-solutions/poron-industrial-polyurethanes/poron-4701-30 (accessed on 26 April 2020).
- Kim, T.; Qiao, W.; Qu, L. A series-connected self-reconfigurable multicell battery capable of safe and effective charging/discharging and balancing operations. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012. [Google Scholar]
- Shousha, C.M.; McRae, T.; Prodić, A.; Marten, V.; Milios, J. Design and Implementation of High Power Density Assisting Step-Up Converter With Integrated Battery Balancing Feature. IEEE Trans. Emerg. Sel. Top. Power Electron. 2017, 5, 1068–1077. [Google Scholar] [CrossRef]
- Kim, Y.; Samad, N.A.; Oh, K.Y.; Siegel, J.B.; Epureanu, B.I.; Stefanopoulou, A.G. Estimating State-of-Charge Imbalance of Batteries Using Force Measurements. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Huang, W.; Qahouq, J.A.A. Energy sharing control scheme for state-of-charge balancing of distributed battery energy storage system. IEEE Trans. Ind. Electron. 2015, 62, 2764–2776. [Google Scholar] [CrossRef]
- Knobloch, A.; Kapusta, C.; Karp, J.; Plotnikov, Y.; Siegel, J.B.; Stefanopoulou, A.G. Fabrication of Multimeasurand Sensor for Monitoring of a Li-Ion Battery. J. Electron. Packag. 2018, 140, 031002. [Google Scholar] [CrossRef]
- Polóni, T.; Figueroa-Santos, M.; Siegel, J.; Stefanopoulou, A. Integration of Non-Monotonic Cell Swelling Characteristic for State-of-Charge Estimation. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018. [Google Scholar]
- Lee, S.; Mohtat, P.; Siegel, J.; Stefanopoulou, A. Beyond Estimating Battery State of Health: Identifiability of Individual Electrode Capacity and Utilization. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018. [Google Scholar]
- Usabc Electric Vehicle Battery Test Procedures Manual, Appendix j-Detailed Procedure. Available online: https://www.uscar.org/guest/article_view.php?articles_id=74 (accessed on 26 April 2020).
- Domenico, D.D.; Stefanopoulou, A.; Fiengo, G. Lithium-Ion Battery State of Charge and Critical Surface Charge Estimation Using an Electrochemical Model-Based Extended Kalman Filter. J. Dyn. Syst.-Trans. ASME 2010, 132, 061302. [Google Scholar] [CrossRef]
- Forman, J.C.; Moura, S.J.; Stein, J.L.; Fathy, H.K. Genetic parameter identification of the Doyle-Fuller- Newman model from experimental cycling of a LiFePO4 battery. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Pletcher, D. Electrochemistry: Volume 8; Royal Society of Chemistry: London, UK, 2007. [Google Scholar]
- Hu, X.; Li, S.; Peng, H. A Comparative Study of Equivalent Circuit Models for Li-Ion Batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Perez, H.E.; Siegel, J.B.; Lin, X.; Stefanopoulou, A.G.; Ding, Y.; Castanier, M.P. Parameterization and Validation of an Integrated Electro-Thermal Cylindrical LFP Battery Model. In Proceedings of the ASME 2012 5th Annual Dynamic Systems and Control Conference Joint with the JSME 2012 11th Motion and Vibration Conference, Fort Lauderdale, FL, USA, 17–19 October 2012. [Google Scholar]
- Plett, G.L. Battery Management Systems, Volume I: Battery Modeling; Artech House: Boston, MA, USA, 2015. [Google Scholar]
- Lewis, F.L. Optimal Estimation: With an Introduction to Stochastic Control Theory; Wiley: New York, NY, USA, 1986. [Google Scholar]
- Peabody, C.; Arnold, C.B. The Role of Mechanically Induced Separator Creep in Lithium-Ion Battery Capacity Fade. J. Power Sources 2011, 196, 8147–8153. [Google Scholar] [CrossRef]








| Parameters | Values |
|---|---|
| R | 1.5 mohms |
| 1.4 mohms | |
| 13,014 farad | |
| 2.7 mohms | |
| 143,000 farad | |
| 0.00054 |
| Models | Q | R |
|---|---|---|
| V | 50 | |
| V&F | diag(50,10,000) | |
| V&F Bias | diag(50,10,000) |
| Initial SOC Error | Parameters | Observer V | Switch Observer V&F Bias |
|---|---|---|---|
| +10% | Time to 5% EEB [min] | 67.81 | 42.44 |
| Max SOC Error [%] | 3.32 | 3.22 | |
| RMSE | 0.0394 | 0.0337 | |
| −10% | Time to 5% EEB [min] | 41.33 | 7.86 |
| Max SOC Error [%] | 5.15 | 1.54 | |
| RMSE | 0.0321 | 0.0185 |
| Models | Q | R |
|---|---|---|
| V&F Bias | diag(50,10,000) | |
| V&F Bias Mismatch | diag(50,10,000) |
| Initial SOC Error | Parameters | Observer V&F Bias | Switch Observer V&F Bias Mismatch |
|---|---|---|---|
| +10% | Time to 5% EEB [min] | 42.5 | 42.55 |
| Max SOC Error [%] | 2.79 | 3.01 | |
| RMSE | 0.0327 | 0.0377 | |
| −10% | Time to 5% EEB [min] | 8.38 | 5 |
| Max SOC Error [%] | 2.38 | 4.31 | |
| RMSE | 0.0200 | 0.0177 |
| Initial SOC Error | Parameters | Observer V | Switch Observer V&F |
|---|---|---|---|
| +10% | Time to 5% EEB [min] | 95.5 | 0.18 |
| Max SOC Error [%] | 11.89 | 11.79 | |
| RMSE | 0.0741 | 0.0611 | |
| −10% | Time to 5% EEB [min] | 6.95 | 6.54 |
| Max SOC Error [%] | 11.89 | 11.79 | |
| RMSE | 0.0594 | 0.0574 |
| Models | Q | R |
|---|---|---|
| V | 50 | |
| V&F Bias | diag(1,1×10,0.09,50) | (50,10,000) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Figueroa-Santos, M.A.; Siegel, J.B.; Stefanopoulou, A.G. Leveraging Cell Expansion Sensing in State of Charge Estimation: Practical Considerations. Energies 2020, 13, 2653. https://doi.org/10.3390/en13102653
Figueroa-Santos MA, Siegel JB, Stefanopoulou AG. Leveraging Cell Expansion Sensing in State of Charge Estimation: Practical Considerations. Energies. 2020; 13(10):2653. https://doi.org/10.3390/en13102653
Chicago/Turabian StyleFigueroa-Santos, Miriam A., Jason B. Siegel, and Anna G. Stefanopoulou. 2020. "Leveraging Cell Expansion Sensing in State of Charge Estimation: Practical Considerations" Energies 13, no. 10: 2653. https://doi.org/10.3390/en13102653
APA StyleFigueroa-Santos, M. A., Siegel, J. B., & Stefanopoulou, A. G. (2020). Leveraging Cell Expansion Sensing in State of Charge Estimation: Practical Considerations. Energies, 13(10), 2653. https://doi.org/10.3390/en13102653