Analysis of Influence of Ship Roll on Ship Power System with Renewable Energy

Abstract
:1. Introduction
2. Hybrid Power Ship Modeling and Analysis
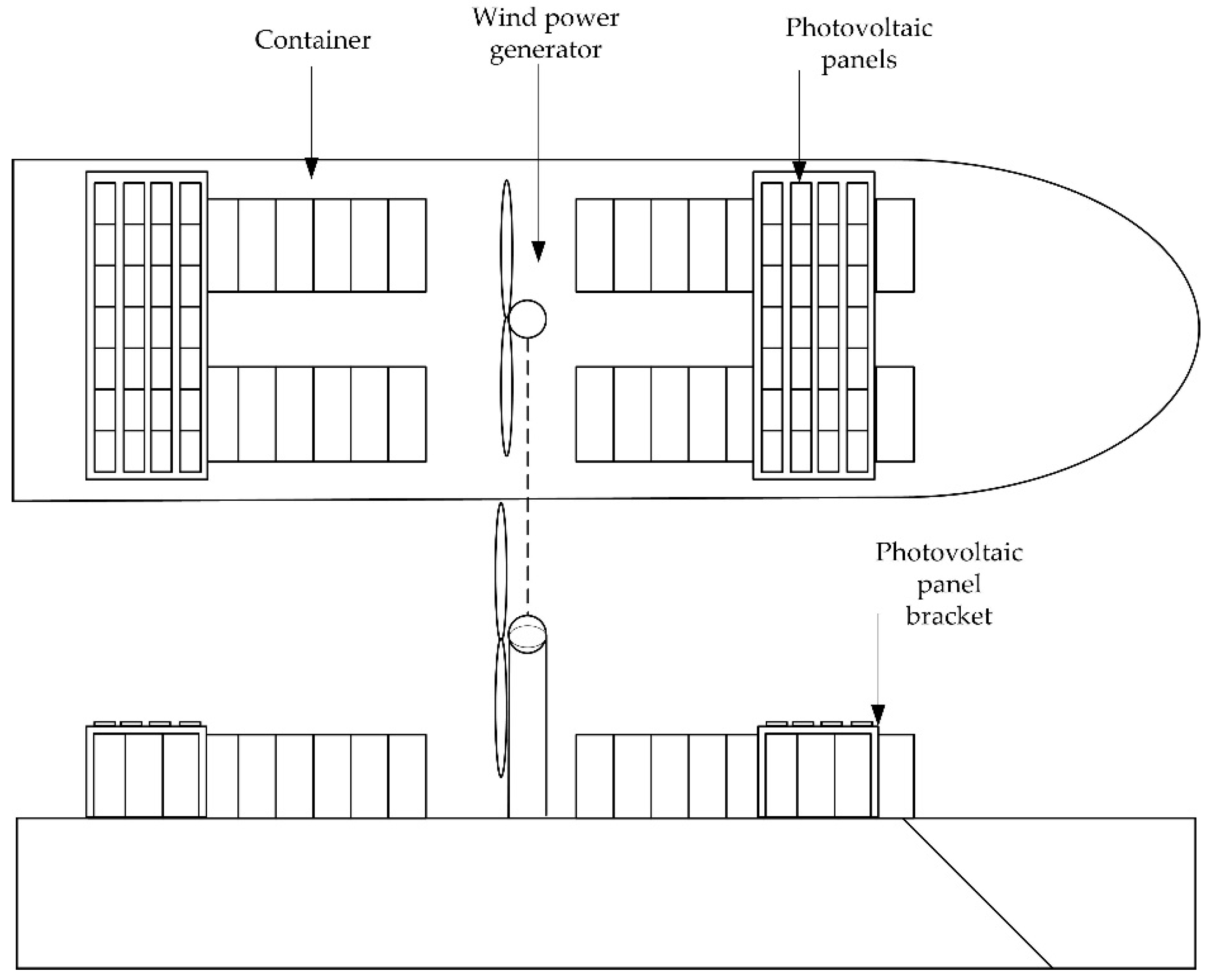
2.1. System Configuration
2.2. Component Modeling of Hybrid Ship Power System
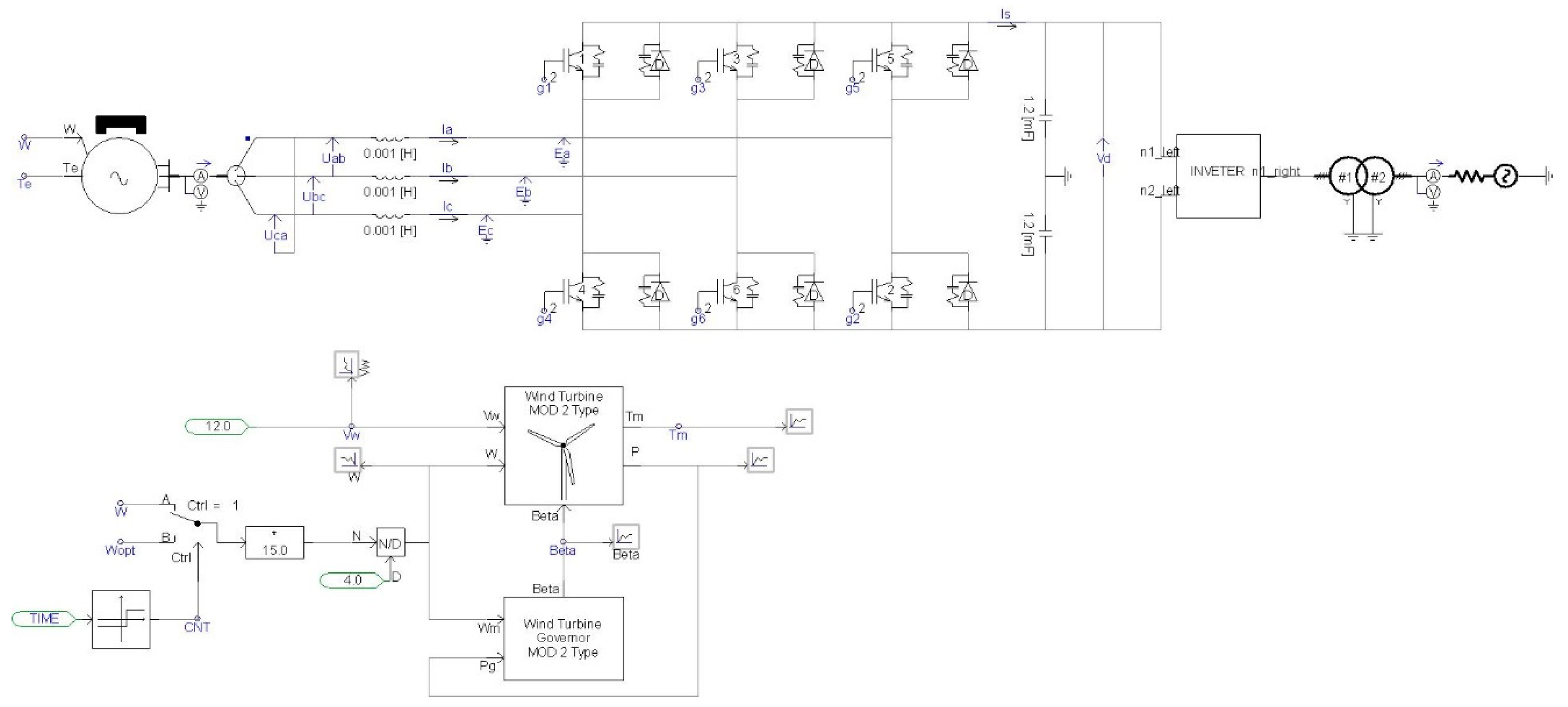
2.2.1. Wind Power Generation System
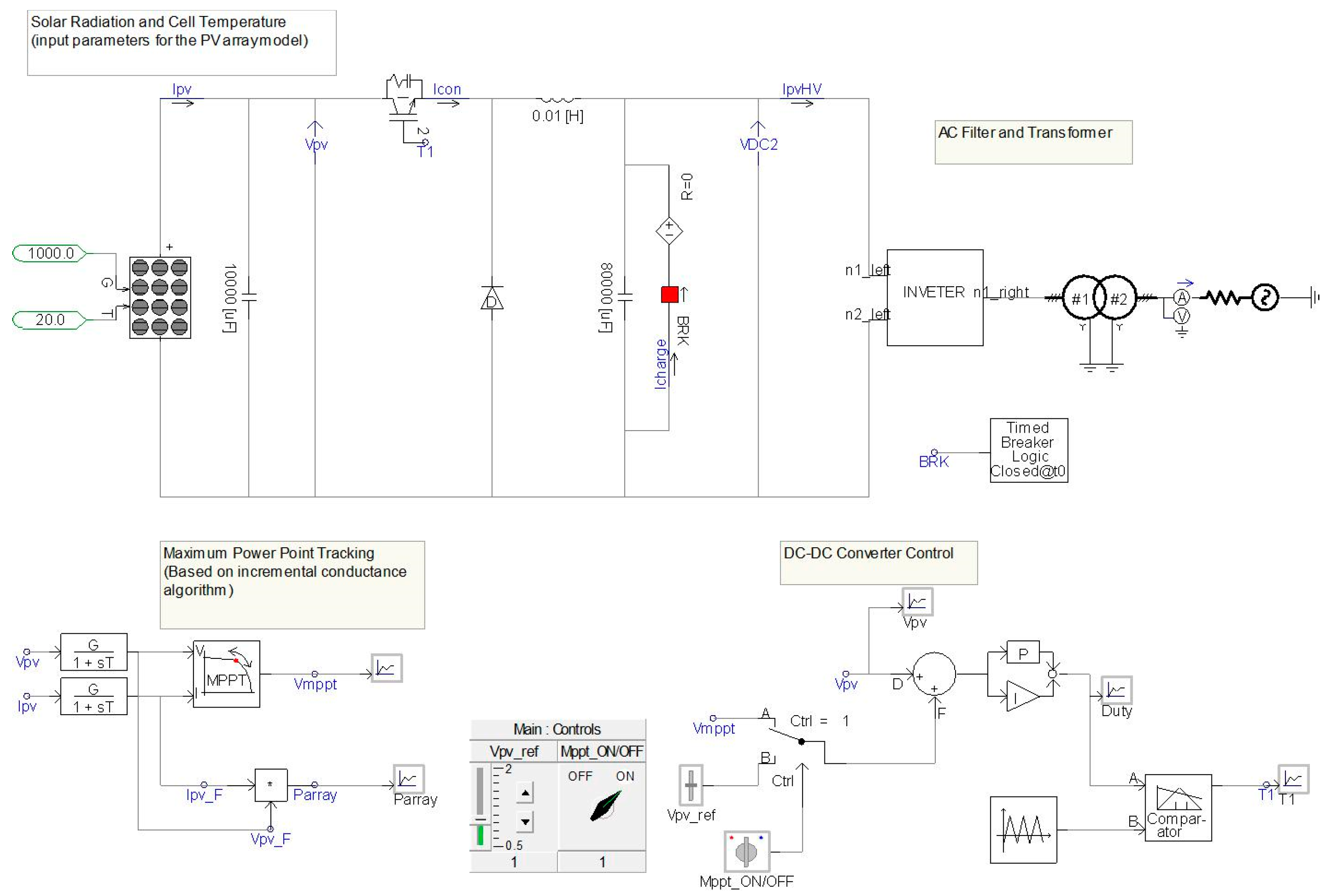
2.2.2. Photovoltaic Power Generation System
2.2.3. Battery System
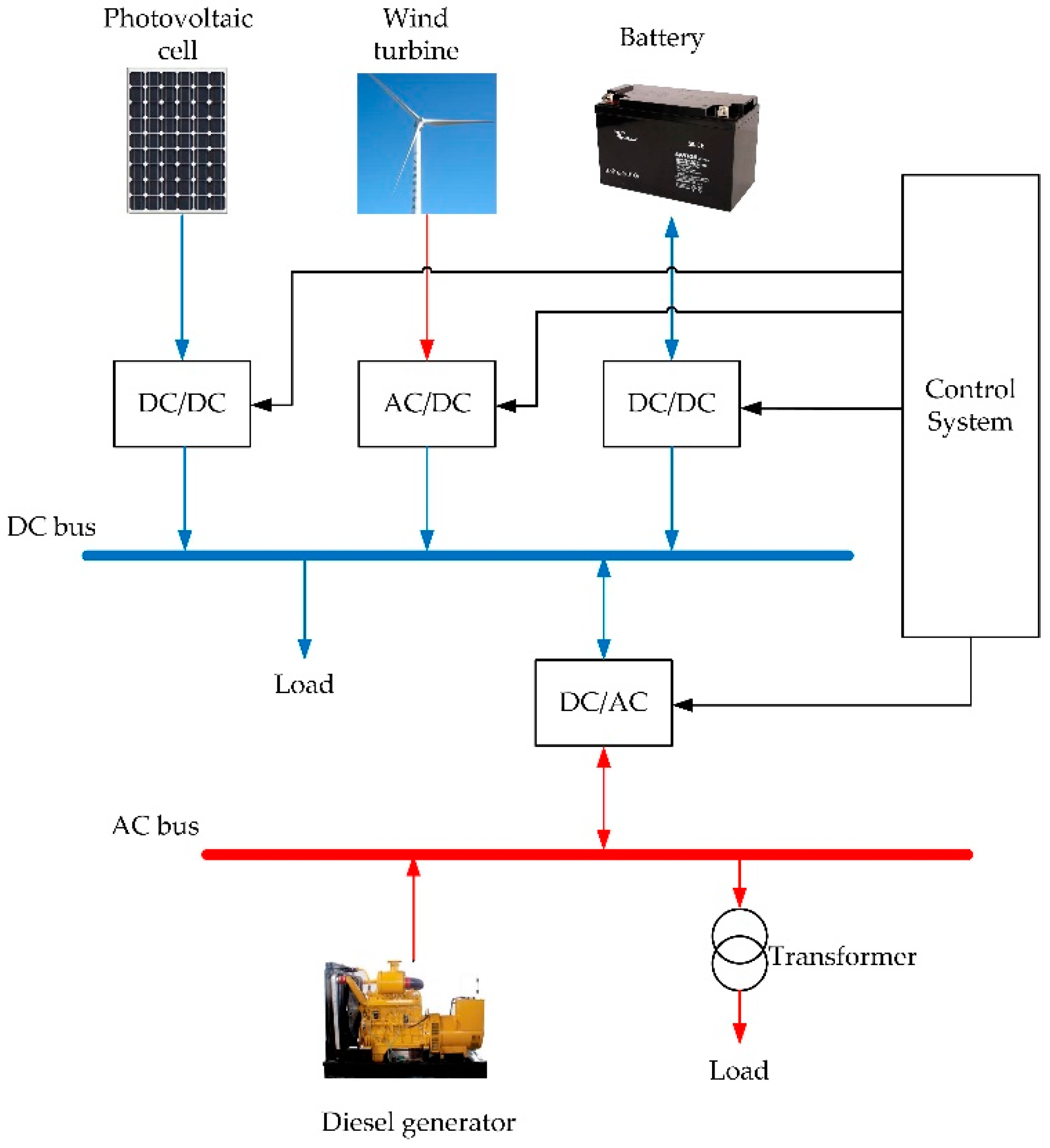
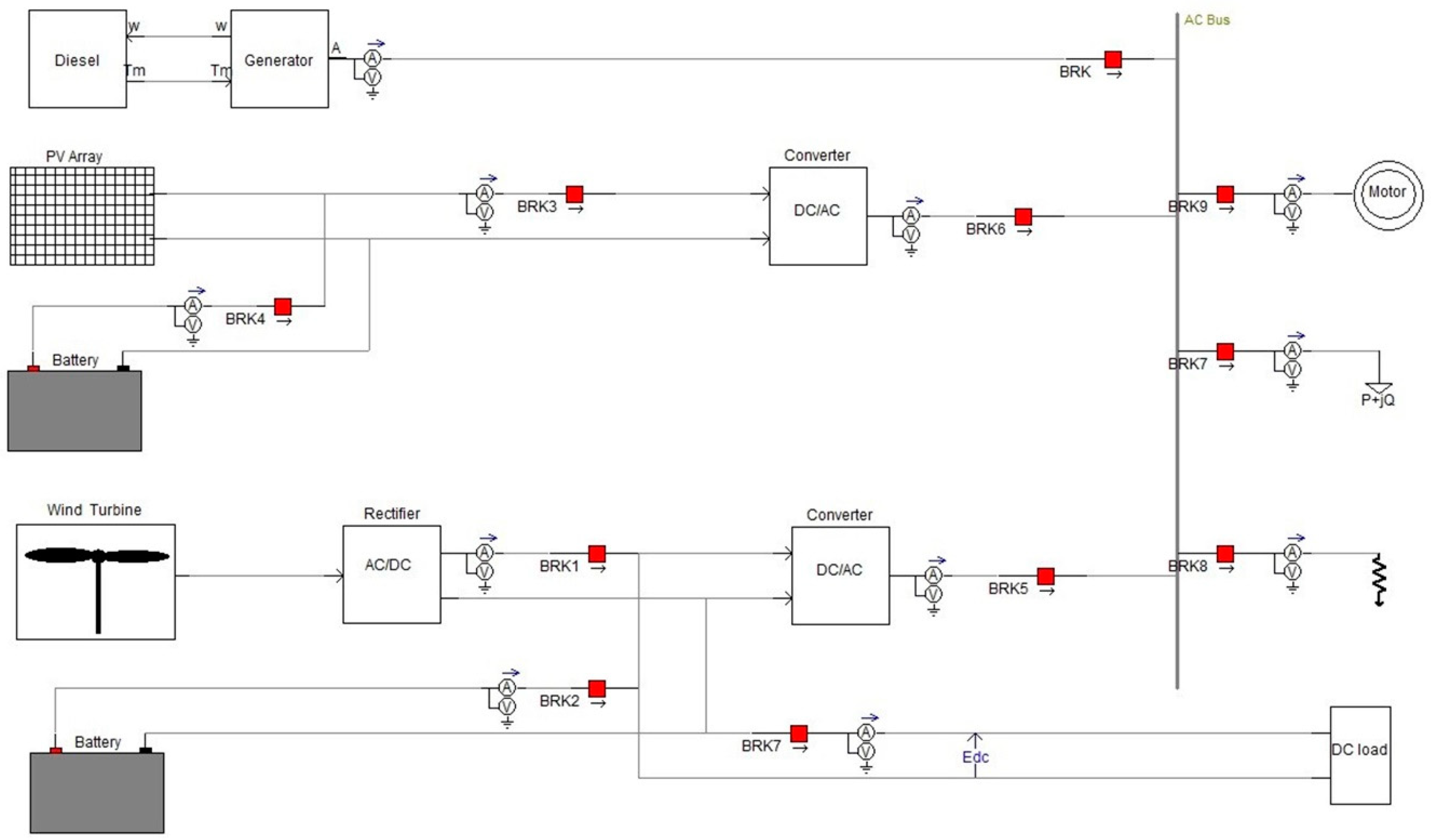
2.2.4. Topological Structure of Ship Power System Integrated with Renewable Energy
3. Hull Roll Control Strategy
4. Simulation Analysis of Renewable Energy Ship Roll
4.1. Experimental Conditions
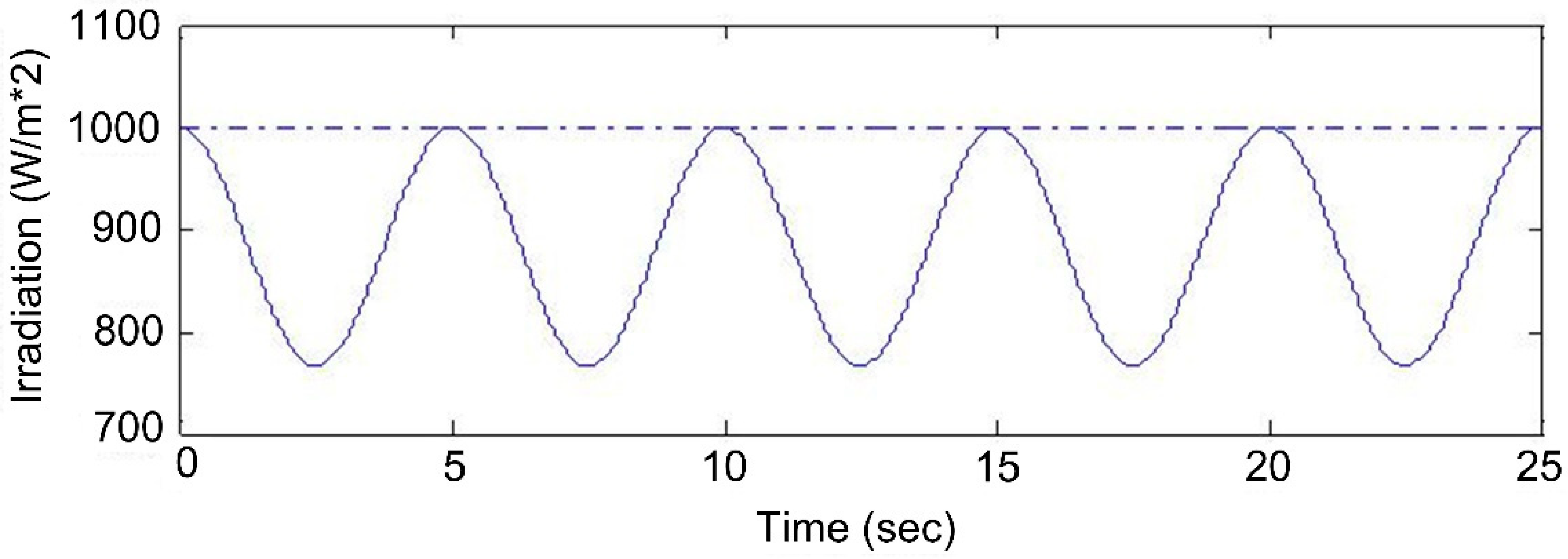
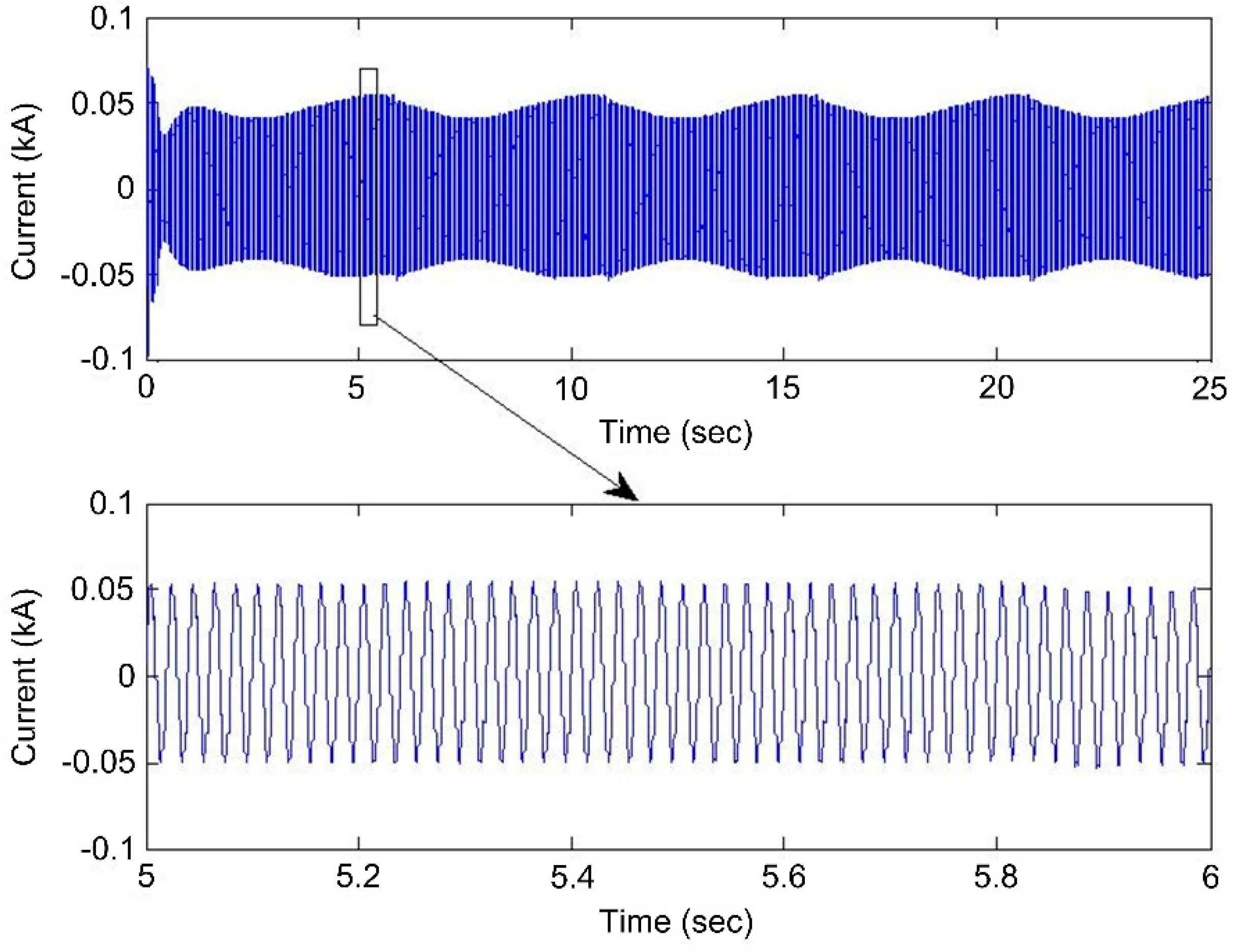
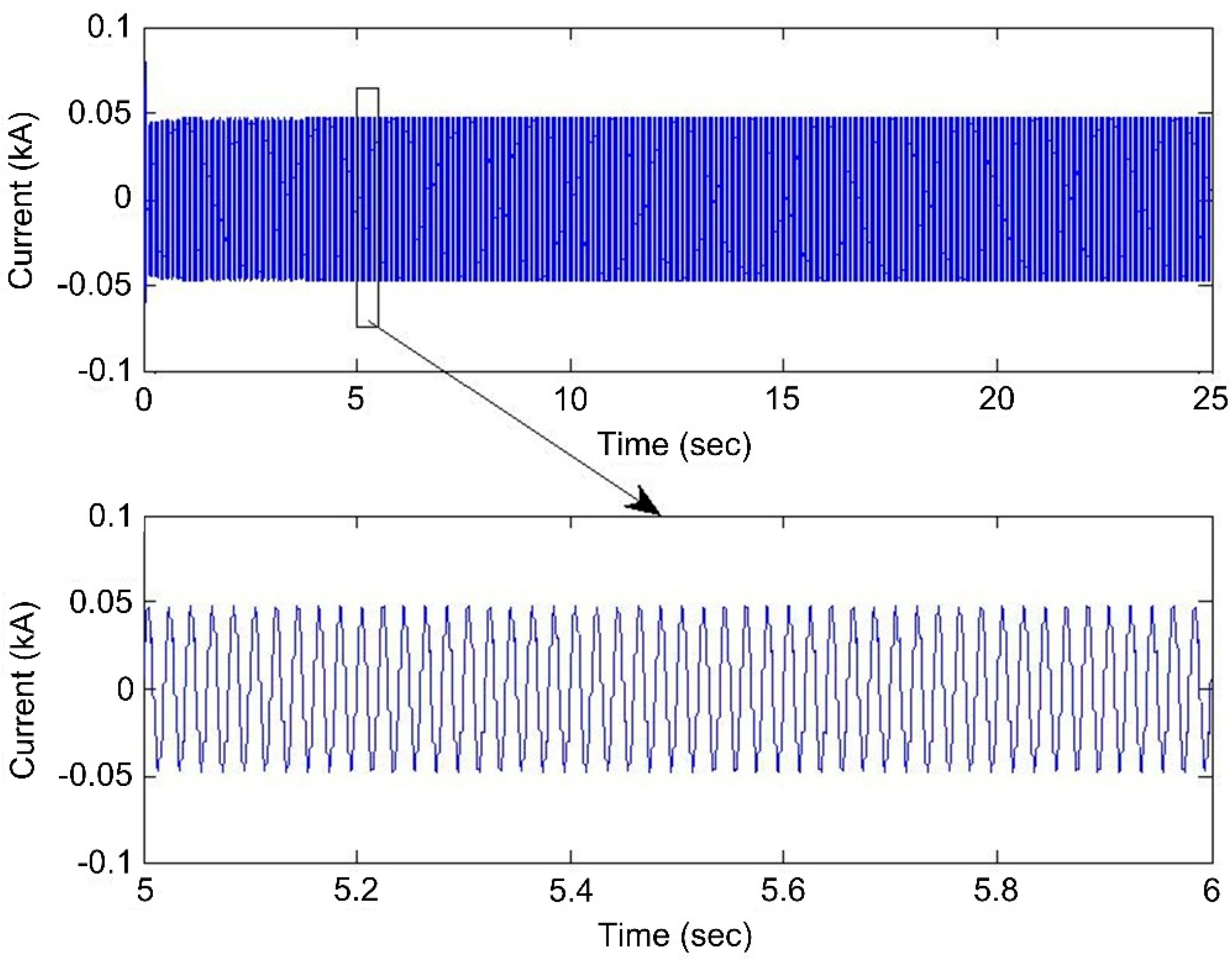
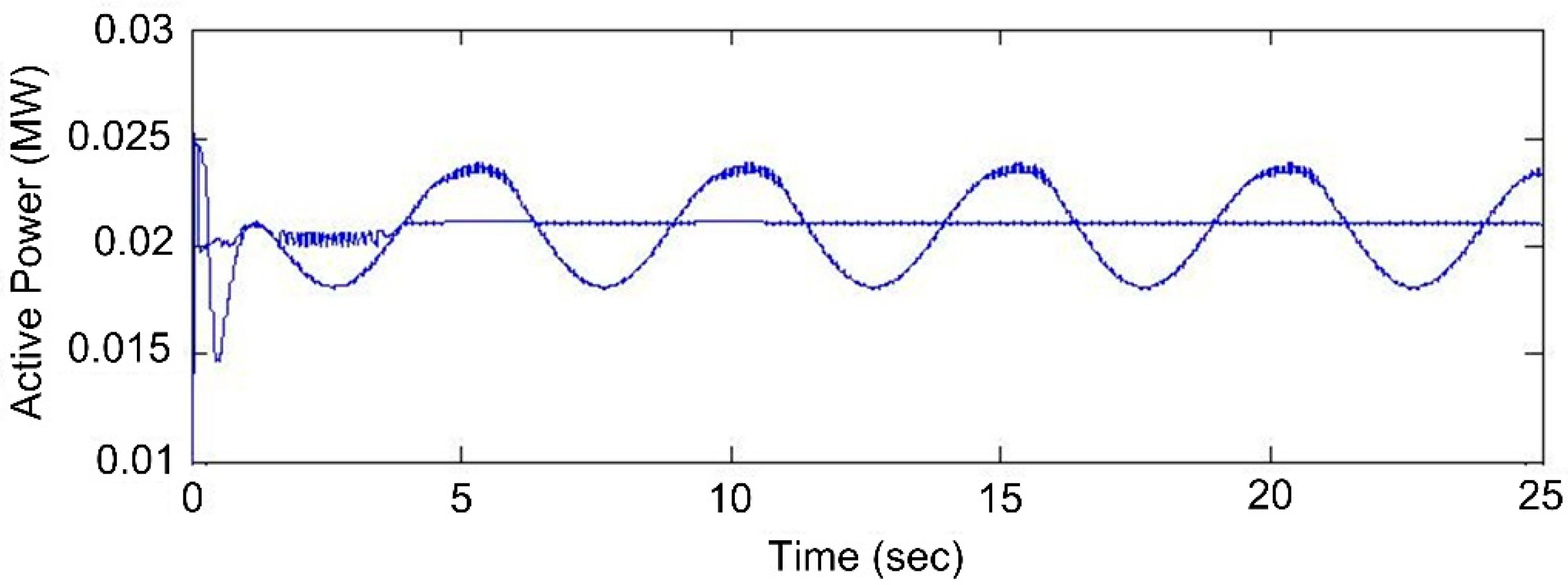
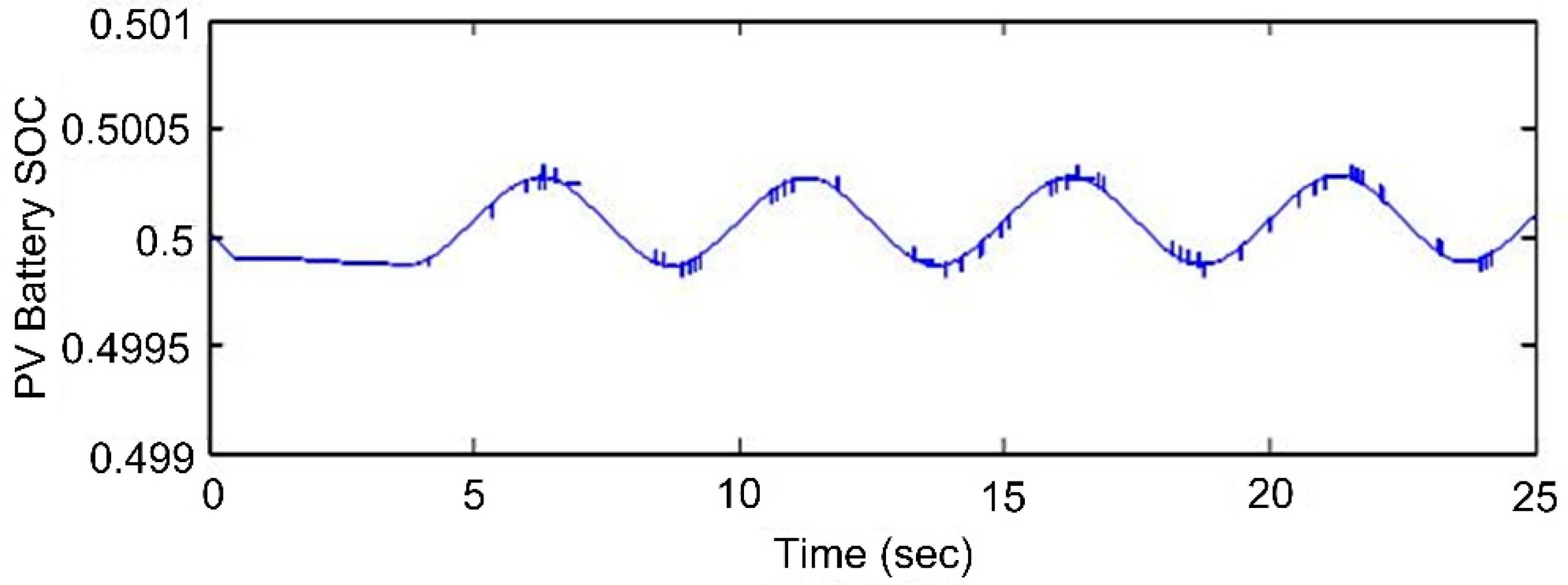
4.2. Simulation Analysis of Photovoltaic System
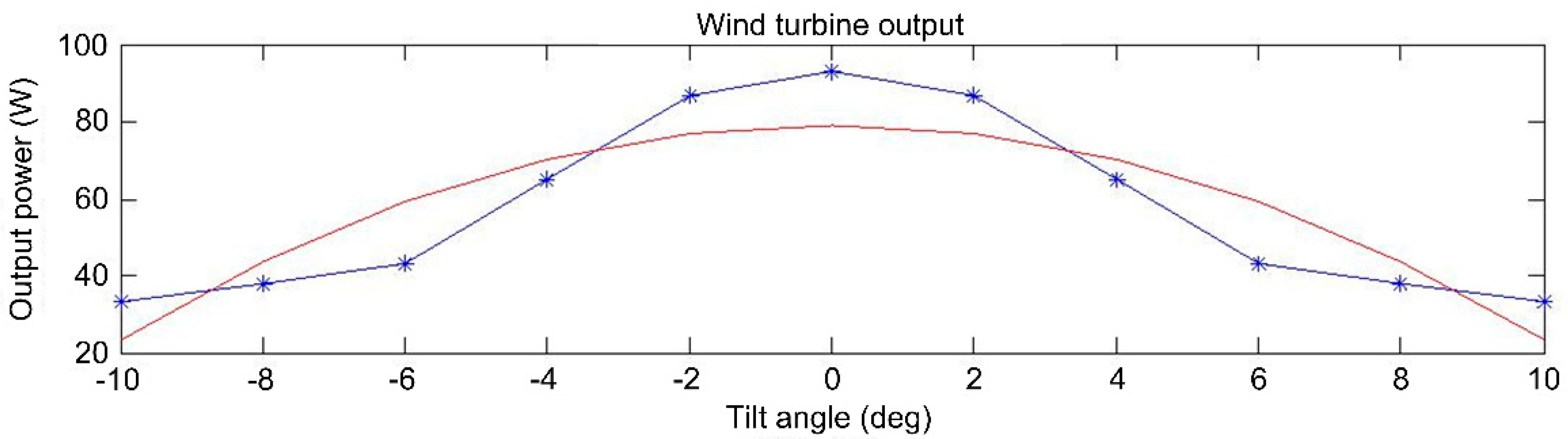
4.3. Simulation Analysis of Wind Turbine
5. Conclusions
- The simulation models of photovoltaic power generation system, wind power generation system, energy storage system and ship power system were established, and the correctness of the models was verified. Then each subsystem was combined together to form a ship power system simulation model integrated with renewable energy.
- Different from the working environment on land, it is necessary to introduce the influence of ship rolling to the system simulation model when the ship is in the rolling state. For photovoltaic power generation system, the impact of rolling is equivalent to the change of illumination intensity; for wind generation power system, the impact of rolling is equivalent to the change of wind speed.
- Experiments were carried out on the comprehensive experiment platform of renewable energy. The grid-connected power curves of the photovoltaic system and wind turbine generator set were tested on the condition that the ship was rolling. The change of the grid-connected power of the experimental platform during the ship rolling is basically consistent with the simulation results.
- By comparing the simulation results between the conditions of non-access battery and access battery, it can be seen that the dynamic charge-discharge performance of the battery can completely track the power fluctuations caused by the ship’s rolling so as to stabilize the power fluctuations. It is not necessary to use other expensive energy storage devices or to combine the battery with other energy storage devices, which will reduce the capacity of other expensive energy storage devices; thus, the battery makes the whole system more economical.
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, M.; Fan, Y.H. The voltage stability research of ship electric power system. In Proceedings of the 2006 CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, China, 14–16 August 2006; pp. 1–5. [Google Scholar]
- Muneer, W.; Bhattacharya, K.; Canizares, C.A. Large-scale solar PV investment models, tools, and analysis: The Ontario case. IEEE Trans. Power Syst. 2011, 26, 2547–2555. [Google Scholar] [CrossRef]
- Pulipaka, S.; Mani, F.; Kumar, R. Modeling of soiled PV module with neural networks and regression using particle size composition. Sol. Energy 2016, 123, 116–126. [Google Scholar] [CrossRef]
- Velasco-Quesada, G.; Guinjoan-Gispert, F.; Pique-Lopez, R.; Roman-Lumbreras, M.; Conesa-Roca, A. Electrical PV array reconfiguration strategy for energy extraction improvement in grid-connected PV systems. IEEE Trans. Ind. Electron. 2009, 56, 4319–4331. [Google Scholar] [CrossRef] [Green Version]
- Yilmaz, S.; Ozcalik, H.R.; Kesler, S.; Dincer, F.; Yelmen, B. The analysis of different PV power systems for the determination of optimal PV panels and system installation—A case study in Kahramanmaras, Turkey. Renew. Sustain. Energy Rev. 2015, 52, 1015–1024. [Google Scholar] [CrossRef]
- Bianchi, M.; Branchini, L.; Ferrari, C.; Melino, F. Optimal sizing of grid-independent hybrid photovoltaic–battery power systems for household sector. Appl. Energy 2014, 136, 805–816. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, X.; Li, P.; Wang, K.; Xue, M.; Wang, C. Optimal sizing, operating strategy and operational experience of a stand-alone microgrid on Dongfushan Island. Appl. Energy 2014, 113, 1656–1666. [Google Scholar] [CrossRef]
- Alam, M.S.; Alouani, A.T.; Azeem, M.F. Efficient prediction of maximum PV module output power through dynamic modeling. Sustain. Energy Technol. Assess. 2015, 11, 27–35. [Google Scholar] [CrossRef]
- Notton, G.; Lazarov, V.; Stoyanov, L. Optimal sizing of a grid-connected PV system for various PV module technologies and inclinations, inverter efficiency characteristics and locations. Renew. Energy 2010, 35, 541–554. [Google Scholar] [CrossRef]
- González, A.; Riba, J.R.; Rius, A.; Puig, R. Optimal sizing of a hybrid grid-connected photovoltaic and wind power system. Appl. Energy 2015, 154, 752–762. [Google Scholar] [CrossRef] [Green Version]
- Messalti, S.; Harrag, A.G.; Loukriz, A.E. A new neural networks MPPT controller for PV systems. In Proceedings of the IREC 2015 The Sixth International Renewable Energy Congress, Sousse, Tunisia, 24–26 March 2015; pp. 1–6. [Google Scholar]
- Melício, R.; Mendes, V.; Catalão, J. Transient analysis of variable-speed wind turbines at wind speed disturbances and a pitch control malfunction. Appl. Energy 2011, 88, 1322–1330. [Google Scholar] [CrossRef]
- Xu, J.; Qi, W.; Teng, Y. Study of influence on power system voltage stability of wind farm power output fluctuation. In Proceedings of the Advanced Materials Research, Dalian, China, 30–31 March 2013; pp. 846–849. [Google Scholar]
- Liao, Z.; Qi, X.; Zheng, S.; Wang, F. Stability analysis of photovoltaic generation system under rapid change of light intensity. Power Syst. Technol. 2011, 35, 60–65. [Google Scholar] [CrossRef] [Green Version]
- Shah, R.; Mithulananthan, N.; Bansal, R.C.; Ramachandaramurthy, V.K. A review of key power system stability challenges for large-scale PV integration. Renew. Sustain. Energy Rev. 2015, 41, 1423–1436. [Google Scholar] [CrossRef]
- Ivče, R.; Jurdana, I.; Mohović, D. Parametric roll monitoring with an integrated ship’s system. In Proceedings of the Elmar-International Symposium Electronics in Marine, Zadar, Croatia, 15–17 September 2010; pp. 333–336. [Google Scholar]
- Cheng, P.; Li, J.; Lan, H. Modeling and PSCAD simulation analysis on a ship power system. In Proceedings of the Applied Mechanics and Materials, Jiaozuo, China, 23–25 December 2011; pp. 58–62. [Google Scholar]
- Lan, H.; Bai, Y.; Wen, S.; Yu, D.; Hong, Y.Y.; Dai, J.; Cheng, P. Modeling and stability analysis of hybrid pv/diesel/ess in ship power system. Inventions 2016, 1, 5. [Google Scholar] [CrossRef] [Green Version]
- Wen, S.; Lan, H.; Hong, Y.Y.; David, C.Y.; Zhang, L.; Cheng, P. Allocation of ESS by interval optimization method considering impact of ship swinging on hybrid PV/diesel ship power system. Appl. Energy 2016, 175, 158–167. [Google Scholar] [CrossRef]
- Chen, J.; Hou, S.; Deng, F.; Chen, Z. A bidirectional multi-port DC-DC converter integrating voltage equalizer. In Proceedings of the 2015 IEEE 6th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aachen, Germany, 22–25 June 2015; pp. 1–6. [Google Scholar]
- Zhou, M.; Zhai, J.; Li, G.; Ren, J. Distributed dispatch approach for bulk AC/DC hybrid systems with high wind power penetration. IEEE Trans. Power Syst. 2018, 33, 3325–3336. [Google Scholar] [CrossRef]
- Hansen, A.D.; Michalke, G. Modelling and control of variable-speed multi-pole permanent magnet synchronous generator wind turbine. Wind Energy 2008, 11, 537–554. [Google Scholar] [CrossRef]
- Tan, Z.; Li, H.; Ju, L.; Song, Y. An optimization model for large-Scale wind power grid connection considering demand response and energy storage systems. Energies 2014, 7, 7282–7304. [Google Scholar] [CrossRef] [Green Version]
- Tsao, P. Simulation of PV systems with power optimizers and distributed power electronics. In Proceedings of the 2010 35th IEEE Photovoltaic Specialists Conference, Honolulu, HI, USA, 20–25 June 2010; pp. 389–393. [Google Scholar]
- Alonso, R.; Roman, E.; Sanz, A.; Santos, V.E.M.; Ibanez, P. Analysis of inverter-voltage influence on distributed MPPT architecture performance. IEEE Trans. Ind. Electron. 2012, 59, 3900–3906. [Google Scholar] [CrossRef]
- Kim, Y.S.; Kang, S.M.; Winston, R. Maximizing power harvest in a distributed photovoltaic system. In Proceedings of the 2012 IEEE International Symposium on Circuits and Systems, Seoul, Korea, 20–23 May 2012; pp. 2275–2278. [Google Scholar]
- Shenoy, P.S.; Kim, K.A.; Krein, P.T. Comparative analysis of differential power conversion architectures and controls for solar photovoltaics. In Proceedings of the 2012 IEEE 13th Workshop on Control and Modeling for Power Electronics (COMPEL), Kyoto, Japan, 10–13 June 2012; pp. 1–7. [Google Scholar]
- Kharb, R.K.; Shimi, S.L.; Chatterji, S.; Ansari, M.F. Modeling of solar PV module and maximum power point tracking using ANFIS. Renew. Sustain. Energy Rev. 2014, 33, 602–612. [Google Scholar] [CrossRef]
- Choi, B.-Y.; Noh, Y.-S.; Ji, Y.-H.; Lee, B.-K.; Won, C.-Y. Battery-integrated power optimizer for PV-battery hybrid power generation system. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012; pp. 1343–1348. [Google Scholar]
- Moghaddam, M.S.; Hajizadeh, A. Control of hybrid PV/Fuel Cell/Battery power systems. In Proceedings of the 2010 Joint International Conference on Power Electronics, Drives and Energy Systems & 2010 Power India, New Delhi, India, 20–23 December 2010; pp. 1–7. [Google Scholar]
- Sun, K.; Zhang, L.; Xing, Y.; Guerrero, J.M. A distributed control strategy based on DC bus signaling for modular photovoltaic generation systems with battery energy storage. IEEE Trans. Power Electron. 2011, 26, 3032–3045. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.-Y.; Jeon, J.-H.; Kim, S.-K.; Cho, C.; Park, J.H.; Kim, H.-M.; Nam, K.-Y. Cooperative control strategy of energy storage system and microsources for stabilizing the microgrid during islanded operation. IEEE Trans. Power Electron. 2010, 25, 3037–3048. [Google Scholar] [CrossRef]
- Konstantinos, F.K.; Alexandridis, A.T. Modular control design and stability analysis of isolated PV-source/battery-storage distributed generation systems. IEEE J. Emerg. Sel. Topics Circuits Syst. 2015, 5, 372–381. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Vessel | The Total Length | Breadth | Depth | Water Line | Route Speed | Load | Voltage | MCR | CSR |
|---|---|---|---|---|---|---|---|---|---|
| SC4268 | 110 m | 19.7 m | 8.5 m | 6.5 m | 16.5 kn | 7400 t | 400 V | 1420 kW | 1200 kW |
| Component Name | Component Size | Weight | Peak Power | Peak Power Voltage | Peak Power Current | OCV | SCC | Module Efficiency |
|---|---|---|---|---|---|---|---|---|
| YGE235 | 1650/990/50 mm | 19.5 kg | 235 W | 29.5 V | 7.97 A | 37 V | 8.54 A | 14.4% |
| Rated Power | Rotor Diameter | Start-up Wind Speed | Rated Wind Speed | Rated Speed | Rated Voltage | Number of Blades | Height of Holder | Way of Yaw |
|---|---|---|---|---|---|---|---|---|
| 10 kW | 7.5 m | 4 m/s | 14 m/s | 260 r/min | 0.38 kV | 3 | 9 m | Fixed yaw |
| Parameters | Parameter Values |
|---|---|
| Power of diesel generator set | 2 MW |
| Network voltage | 0.38 kV |
| Grid frequency | 60 Hz |
| Battery capacity | 600 Ah |
| Rated wind speed | 14 m/s |
| Rated voltage of DC bus | 380 V |
| Rated power of wind turbine | 10 kW |
| Rated power of photovoltaic system | 25 kW |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, P.; Liang, N.; Li, R.; Lan, H.; Cheng, Q. Analysis of Influence of Ship Roll on Ship Power System with Renewable Energy. Energies 2020, 13, 1. https://doi.org/10.3390/en13010001
Cheng P, Liang N, Li R, Lan H, Cheng Q. Analysis of Influence of Ship Roll on Ship Power System with Renewable Energy. Energies. 2020; 13(1):1. https://doi.org/10.3390/en13010001
Chicago/Turabian StyleCheng, Peng, Ning Liang, Ruiye Li, Hai Lan, and Qian Cheng. 2020. "Analysis of Influence of Ship Roll on Ship Power System with Renewable Energy" Energies 13, no. 1: 1. https://doi.org/10.3390/en13010001
APA StyleCheng, P., Liang, N., Li, R., Lan, H., & Cheng, Q. (2020). Analysis of Influence of Ship Roll on Ship Power System with Renewable Energy. Energies, 13(1), 1. https://doi.org/10.3390/en13010001