Proportional-Type Sensor Fault Diagnosis Algorithm for DC/DC Boost Converters Based on Disturbance Observer


Abstract
1. Introduction
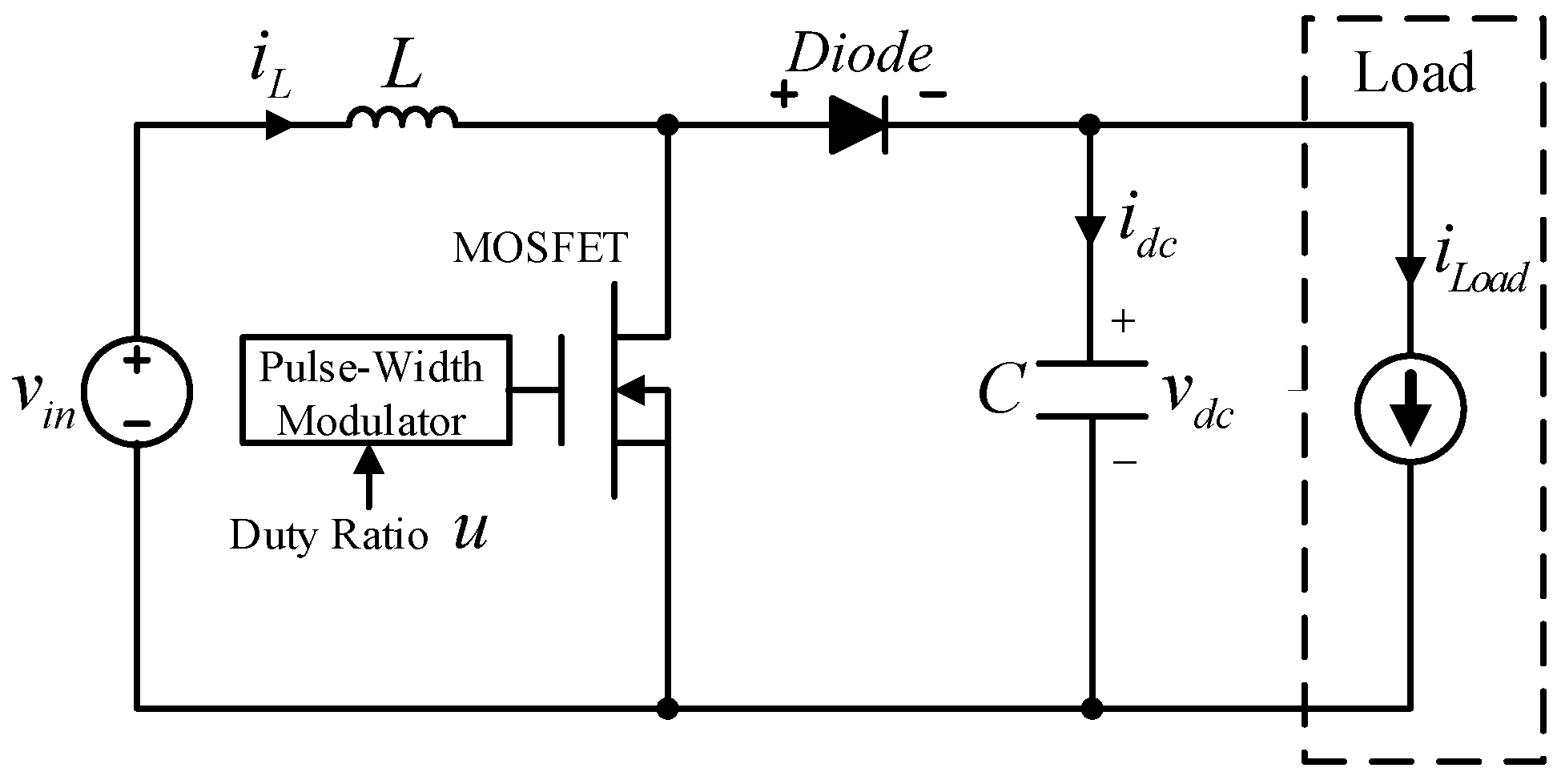
2. DC/DC Boost Converter Nonlinear Dynamics
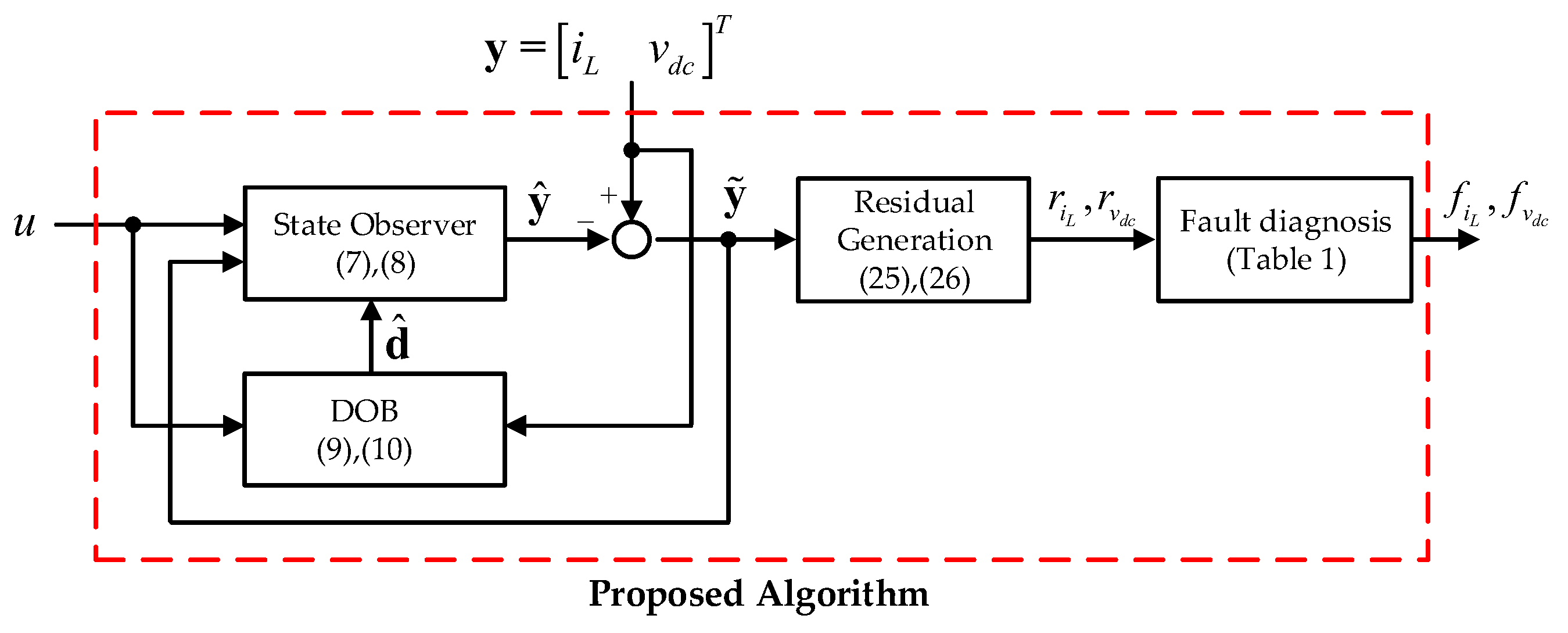
3. Fault Diagnosis Algorithm
3.1. Full-State Observer Design
3.2. Closed-Loop Properties
3.3. Normalized Residual and Fault Diagnosis Criteria
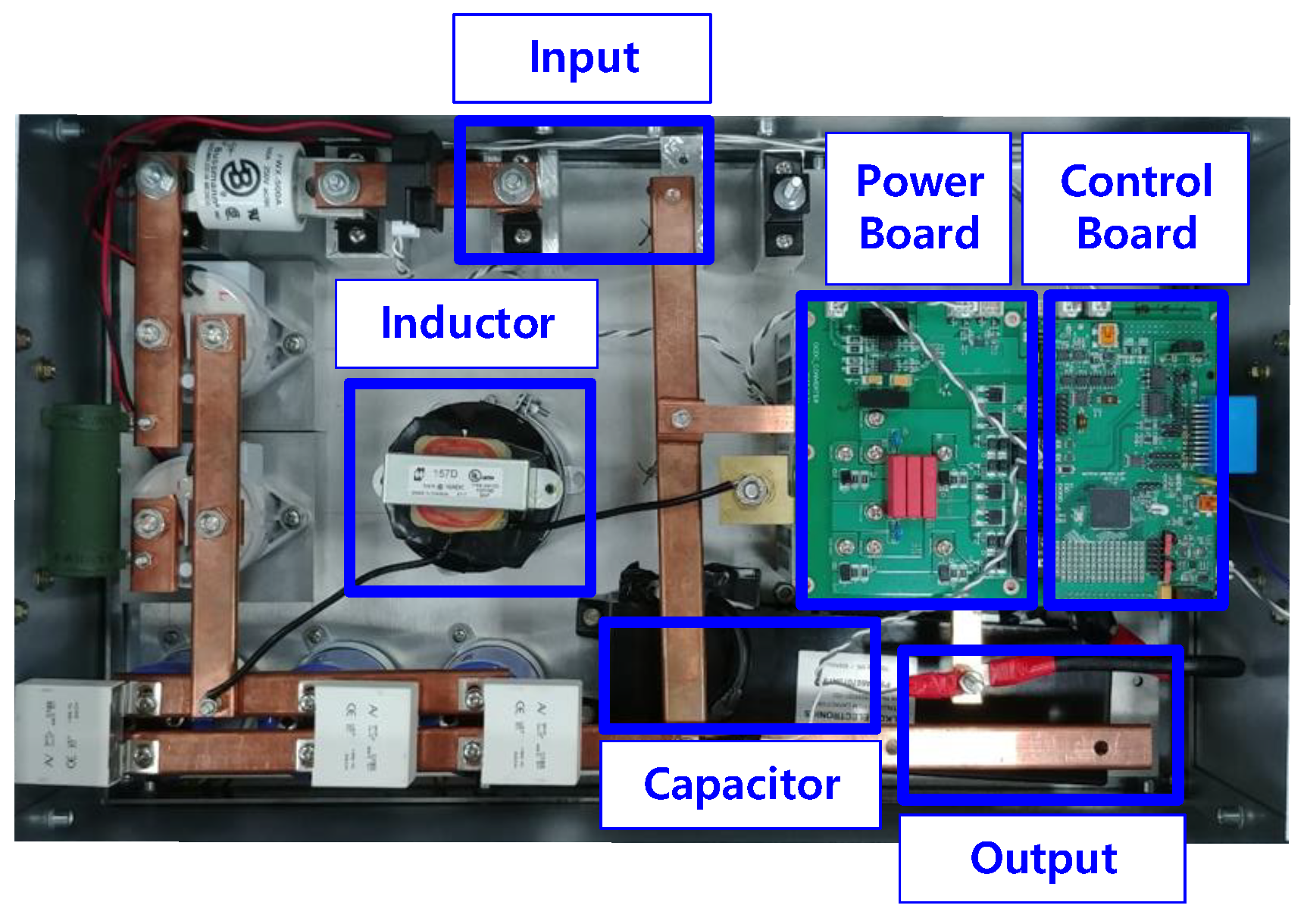
4. Experimental Results
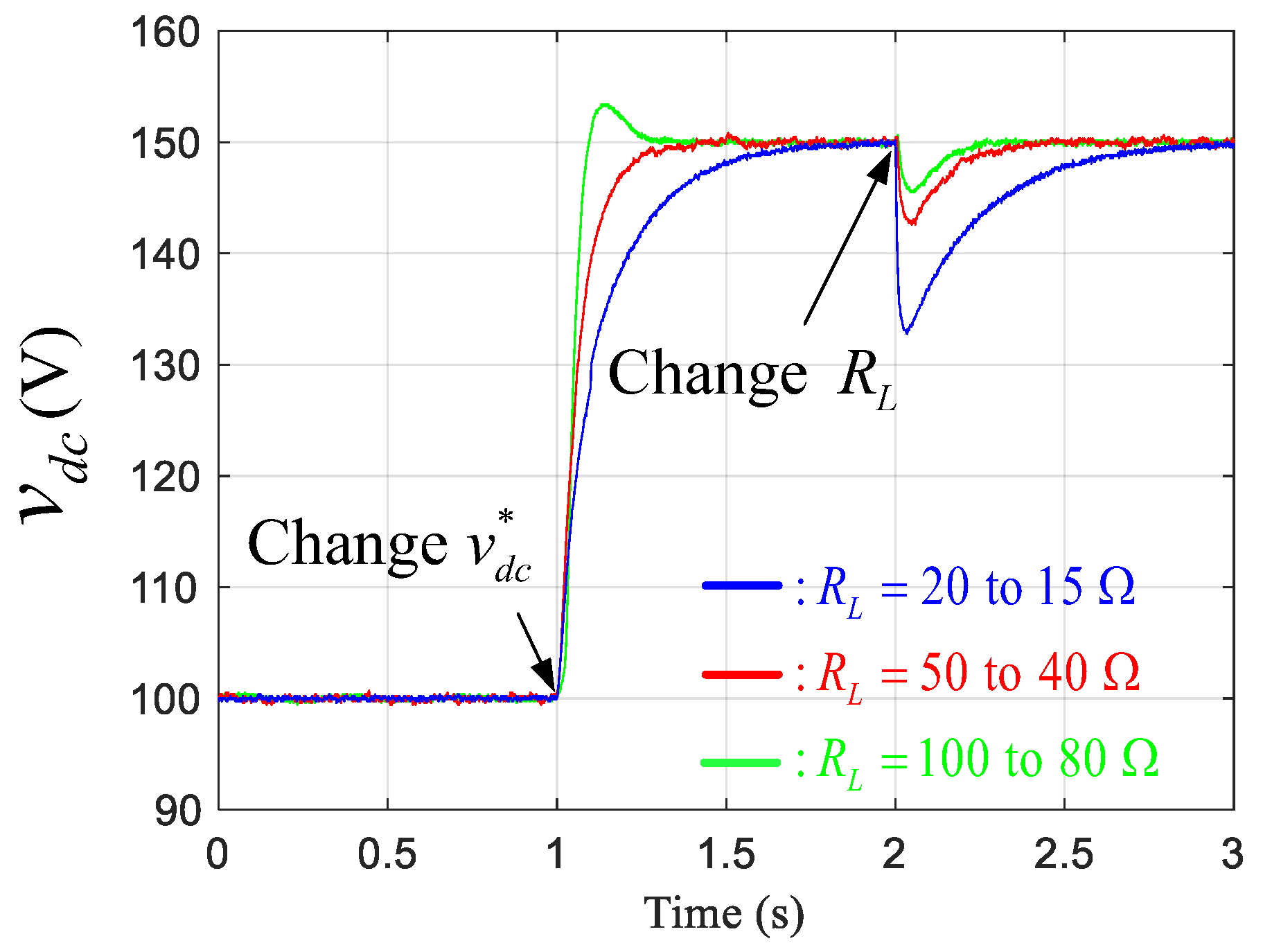
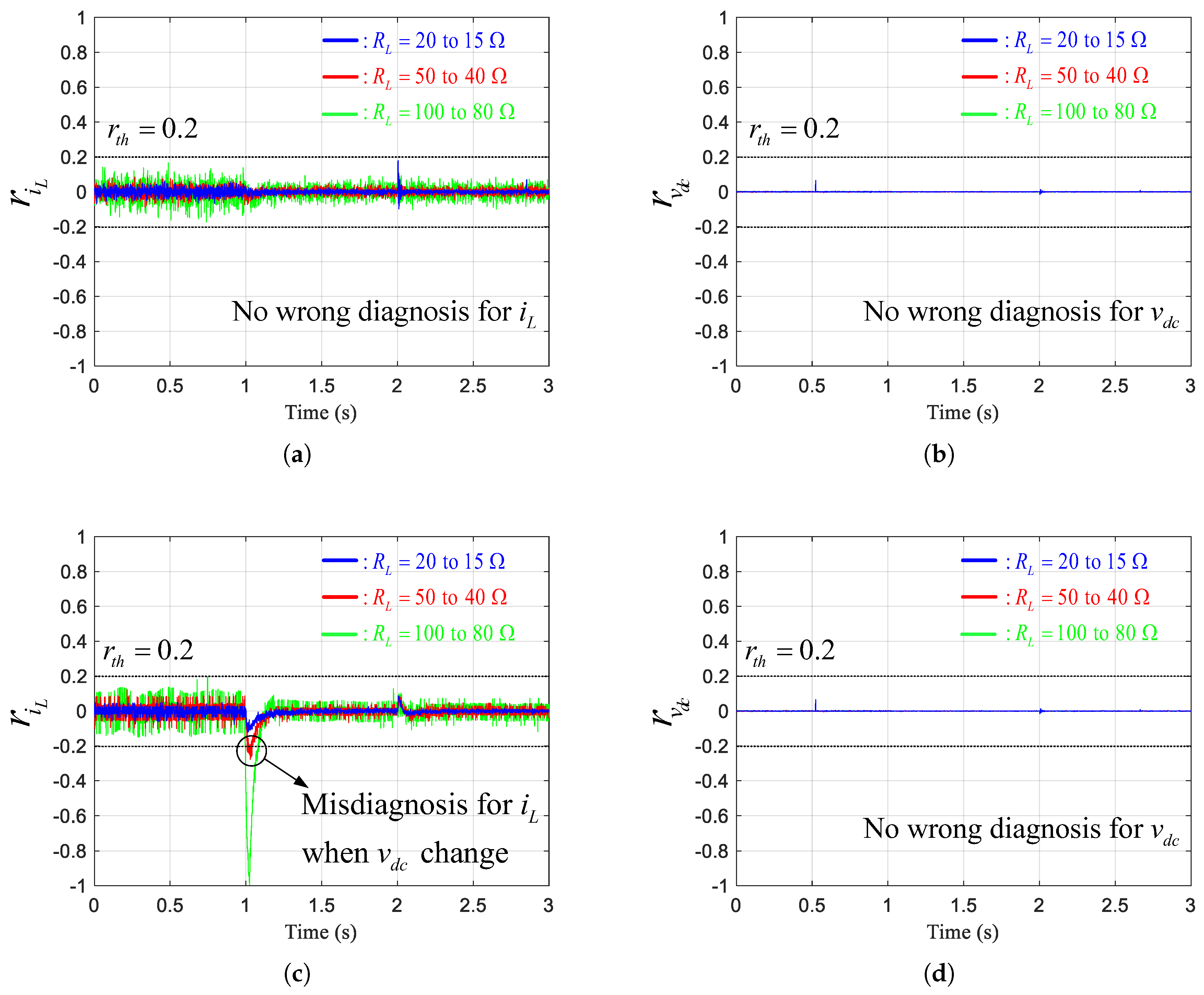
4.1. Experiments under Healthy Conditions
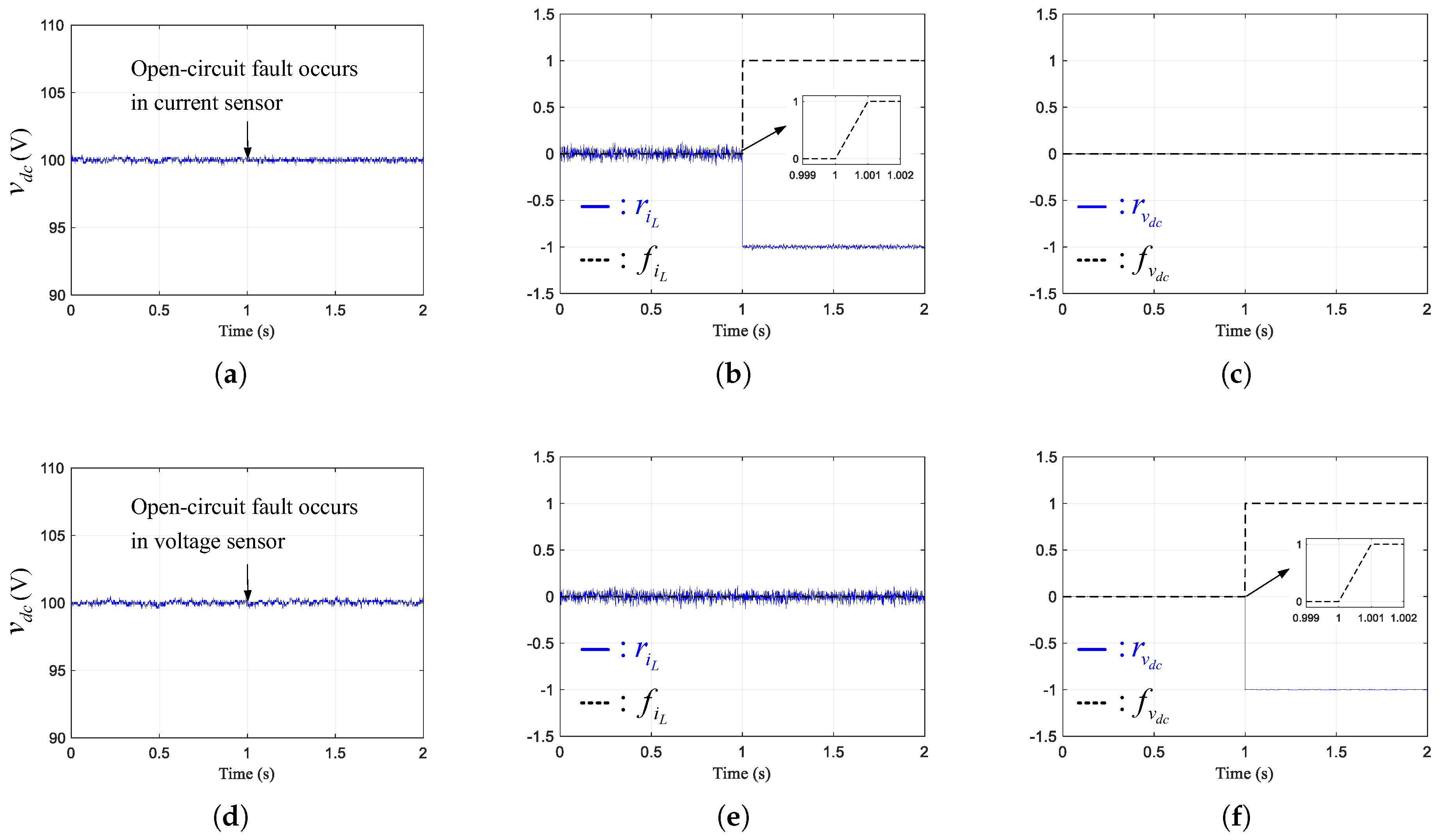
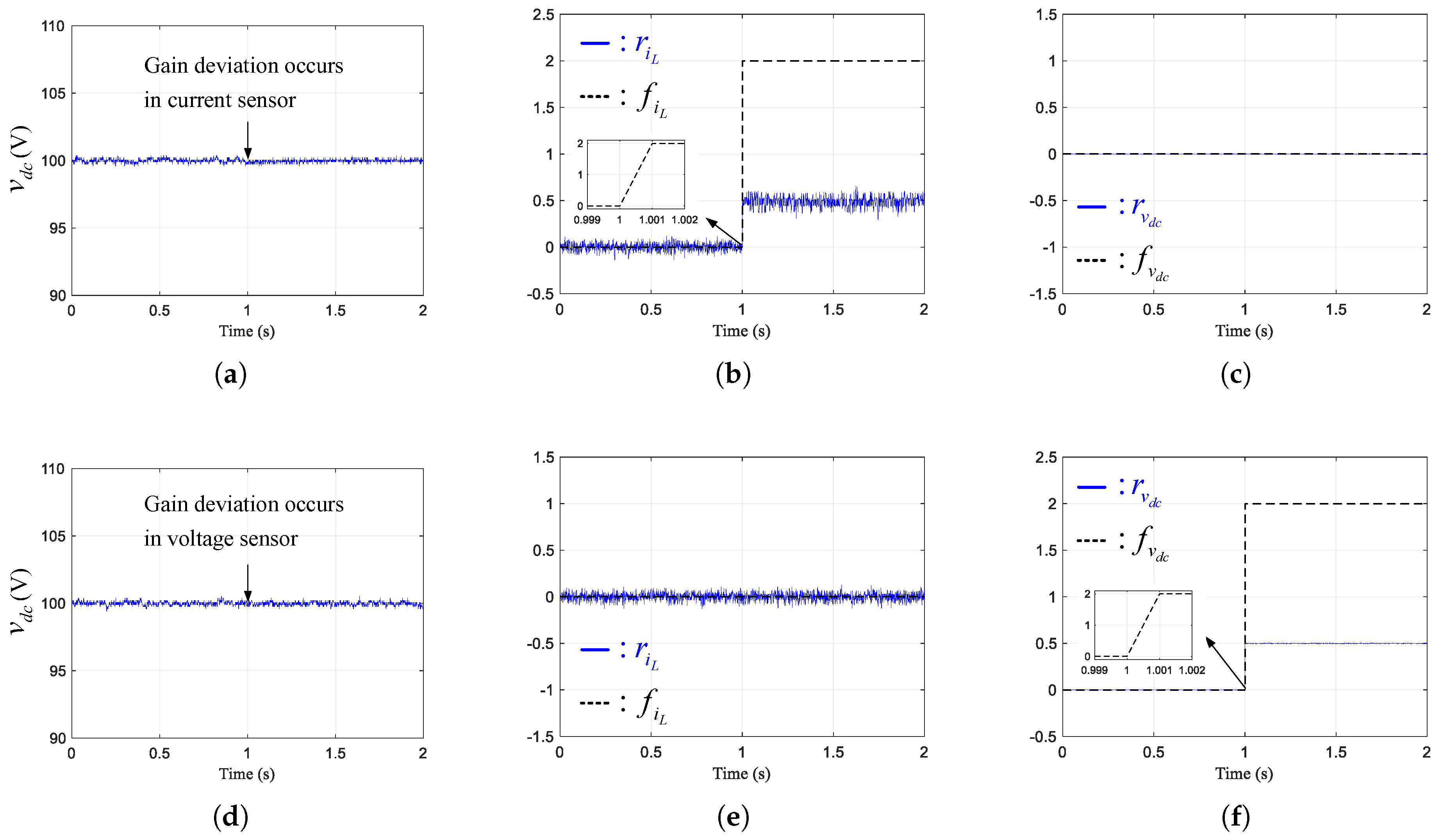
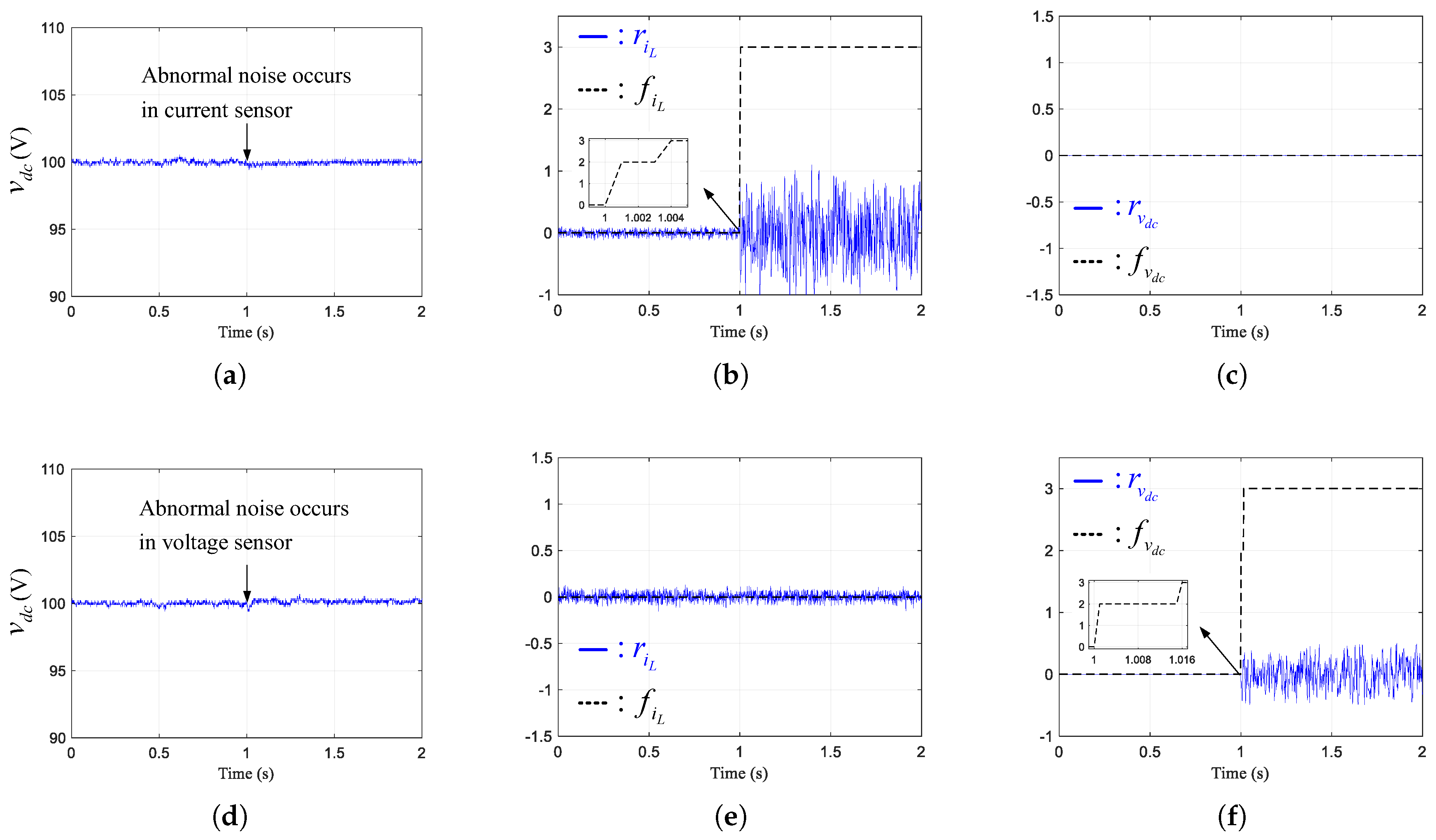
4.2. Experiments under Fault Conditions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhai, L.; Zhang, T.; Cao, Y.; Yang, S.; Kavuma, S.; Feng, H. Conducted EMI prediction and mitigation strategy based on transfer function for a high-low voltage DC-DC converter in electric vehicle. Energies 2018, 11, 1028. [Google Scholar] [CrossRef]
- Tran, V.T.; Nguyen, M.K.; Choi, Y.O.; Cho, G.B. Switched-capacitor-based high boost DC-DC converter. Energies 2018, 11, 987. [Google Scholar] [CrossRef]
- Padmanaban, S.; Bhaskar, M.S.; Maroti, P.K.; Blaabjerg, F.; Fedak, V. An original transformer and switched-capacitor (T & SC)-based extension for DC-DC boost converter for high-voltage/low-current renewable energy applications: Hardware implementation of a new T & SC boost converter. Energies 2018, 11, 783. [Google Scholar]
- Bi, H.; Wang, P.; Wang, Z. Common grounded H-type bidirectional DC-DC converter with a wide voltage conversion ratio for a hybrid energy storage system. Energies 2018, 11, 349. [Google Scholar] [CrossRef]
- Zhang, S.H.; Wang, Y.F.; Chen, B.; Han, F.Q.; Wang, Q.C. Studies on a hybrid full-bridge/half-bridge bidirectional CLTC multi-resonant DC-DC converter with a digital synchronous rectification strategy. Energies 2018, 11, 227. [Google Scholar] [CrossRef]
- Lee, J.S.; Lee, K.B. Variable DC-link voltage algorithm with a wide range of maximum power point tracking for a two-string PV system. Energies 2013, 6, 58–78. [Google Scholar] [CrossRef]
- Kim, S.K. Passivity-based robust output voltage tracking control of DC/DC boost converter for wind power systems. Energies 2018, 11, 1469. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Alvarez-Ramirez, J.; Cervantes, I.; Espinosa-Perez, G.; Maya, P.; Morales, A. A stable design of PI control for DC-DC converters with an RHS zero. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2001, 48, 103–106. [Google Scholar] [CrossRef]
- Perry, A.G.; Feng, G.; Liu, Y.F.; Sen, P.C. A design method for PI-like fuzzy logic controllers for DC-DC converter. IEEE Trans. Ind. Electron. 2007, 54, 2688–2696. [Google Scholar] [CrossRef]
- Oucheriah, S.; Guo, L. PWM-based adaptive sliding-mode control for boost DC-DC converters. IEEE Trans. Ind. Electron. 2013, 60, 3291–3294. [Google Scholar] [CrossRef]
- Wang, Y.X.; Yu, D.H.; Kim, Y.B. Robust time-delay control for the DC-DC boost converter. IEEE Trans. Ind. Electron. 2014, 61, 4829–4837. [Google Scholar] [CrossRef]
- Kim, S.K.; Park, C.R.; Kim, J.S.; Lee, Y.I. A stabilizing model predictive controller for voltage regulation of a DC/DC boost converter. IEEE Trans. Control Syst. Technol. 2014, 22, 2016–2023. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Qiu, Y.N.; Jiang, H.X.; Feng, Y.H.; Cao, M.N.; Zhao, Y.; Li, D. A new fault diagnosis algorithm for PMSG wind turbine power converters under variable wind speed conditions. Energies 2016, 9, 548. [Google Scholar] [CrossRef]
- Li, W.; Li, G.Y.; Zeng, R.; Ni, K.; Hu, Y.H.; Wen, H.Q. The fault detection, localization, and tolerant operation of modular multilevel converters with an insulated gate bipolar transistor (IGBT) open circuit fault. Energies 2018, 11, 837. [Google Scholar] [CrossRef]
- Liu, H.; Ma, K.; Loh, P.C.; Blaabjerg, F. Online fault identification based on an adaptive observer for modular multilevel converters applied to wind power generation systems. Energies 2015, 8, 7140–7160. [Google Scholar] [CrossRef]
- Najafabadi, T.A.; Salmasi, F.R.; Jabehdar-Maralani, P. Detection and isolation of speed-, DC-link voltage-, and current-sensor faults based on an adaptive observer in induction-motor drives. IEEE Trans. Ind. Electron. 2011, 58, 1662–1672. [Google Scholar] [CrossRef]
- Espinoza Trejo, D.; Bárcenas, E.; Hernández Díez, J.; Bossio, G.; Espinosa Pérez, G. Open- and short-circuit fault identification for a boost dc/dc converter in PV MPPT systems. Energies 2018, 11, 616. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Z.; Li, B. Sensor fault detection and system reconfiguration for DC-DC boost converter. Sensors 2018, 18, 1375. [Google Scholar] [CrossRef]
- Zhang, X.N.; Foo, G.; Vilathgamuwa, M.D.; Tseng, K.J.; Bhangu, B.S.; Gajanayake, C. Sensor fault detection, isolation and system reconfiguration based on extended Kalman filter for induction motor drives. IET Electr. Power Appl. 2013, 7, 607–617. [Google Scholar] [CrossRef]
- Foo, G.H.B.; Zhang, X.N.; Vilathgamuwa, D.M. A sensor fault detection and isolation method in interior permanent-magnet synchronous motor drives based on an extended kalman filter. IEEE Trans. Ind. Electron. 2013, 60, 3485–3495. [Google Scholar] [CrossRef]
- Campos-Delgado, D.U.; Espinoza-Trejo, D.R. An observer-based diagnosis scheme for single and simultaneous open-switch faults in induction motor drives. IEEE Trans. Ind. Electron. 2011, 58, 671–679. [Google Scholar] [CrossRef]
- Shao, S.; Watson, A.J.; Clare, J.C.; Wheeler, P.W. Robustness analysis and experimental validation of a fault detection and isolation method for the modular multilevel converter. IEEE Trans. Power Electron. 2016, 31, 3794–3805. [Google Scholar] [CrossRef]
- Xia, J.H.; Guo, Y.B.; Dai, B.J.; Zhang, X.H. Sensor fault diagnosis and system reconfiguration approach for an electric traction PWM rectifier based on sliding mode observer. IEEE Trans. Ind. Appl. 2017, 53, 4768–4778. [Google Scholar] [CrossRef]
- Shao, S.; Wheeler, P.W.; Clare, J.C.; Watson, A.J. Fault detection for modular multilevel converters based on sliding mode observer. IEEE Trans. Power Electron. 2013, 28, 4867–4872. [Google Scholar] [CrossRef]
- Xu, J.; Wang, J.; Li, S.; Cao, B. A method to simultaneously detect the current sensor fault and estimate the state of energy for batteries in electric vehicles. Sensors 2016, 16, 1328. [Google Scholar] [CrossRef]
- Boukhari, M.; Chaibet, A.; Boukhnifer, M.; Glaser, S. Proprioceptive sensors’ fault tolerant control strategy for an autonomous vehicle. Sensors 2018, 18, 1893. [Google Scholar] [CrossRef]
- Alavi, S.M.; Saif, M.; Shafai, B. Accurate state estimation in DC-DC converters using a Proportional-Integral Observer (PIO). In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 1304–1309. [Google Scholar]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics, 2nd ed.; Springer: New York, NY, USA, 2001. [Google Scholar]
- Boyd, S.; Ghaoui, L.E.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Dragomir, S. A note on Young’s inequality. Rev. Real Acad. Ciencias Exact. Fís. Nat. Ser. A Mat. 2017, 111, 349–354. [Google Scholar] [CrossRef]
- Elsner, L.; Johnson, C.R. Nonnegative matrices, zero patterns, and spectral inequalities. Linear Algebr. Appl. 1989, 120, 225–236. [Google Scholar] [CrossRef][Green Version]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Tan, R.H.; Hoo, L.Y. DC-DC converter modeling and simulation using state space approach. In Proceedings of the 2015 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 19–20 October 2015; pp. 42–47. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Flag, | Fault Event | Diagnosis Criteria |
|---|---|---|
| 0 | No fault | |
| 1 | Open-circuit fault | ( and ) or ( and ) |
| 2 | Gain deviation | |
| 3 | Abnormal noise | and |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, K.; Kim, K.-S.; Kim, S.-K. Proportional-Type Sensor Fault Diagnosis Algorithm for DC/DC Boost Converters Based on Disturbance Observer. Energies 2019, 12, 1412. https://doi.org/10.3390/en12081412
Choi K, Kim K-S, Kim S-K. Proportional-Type Sensor Fault Diagnosis Algorithm for DC/DC Boost Converters Based on Disturbance Observer. Energies. 2019; 12(8):1412. https://doi.org/10.3390/en12081412
Chicago/Turabian StyleChoi, Kyunghwan, Kyung-Soo Kim, and Seok-Kyoon Kim. 2019. "Proportional-Type Sensor Fault Diagnosis Algorithm for DC/DC Boost Converters Based on Disturbance Observer" Energies 12, no. 8: 1412. https://doi.org/10.3390/en12081412
APA StyleChoi, K., Kim, K.-S., & Kim, S.-K. (2019). Proportional-Type Sensor Fault Diagnosis Algorithm for DC/DC Boost Converters Based on Disturbance Observer. Energies, 12(8), 1412. https://doi.org/10.3390/en12081412