| Index for each battery system (). |
| Index for each conventional generator (). |
| Index for consensus algorithm iterations (). |
| Index for each node of distribution system. |
| Index for each photovoltaic generator (). |
| Index for each hour of the year (). |
| Time step (h). |
| Index for each wind generator (). |
| Ambient temperature at time (°C). |
| Photovoltaic cell temperature of generator at time (°C). |
| Solar radiation at time (W/m2). |
| Nominal operating cell temperature of generator (°C). |
| Temperature coefficient of generator . |
| Parameter of solar transmittance and absorptance. |
| Photovoltaic cell ideality factor. |
| Boltzmann constant (J/K). |
| Electron charge (C). |
| Number of cells connected in serial on generator . |
| Number of cells connected in parallel on generator . |
| Number of panels connected in serial on generator . |
| Number of panels connected in parallel on generator . |
| Number of batteries connected in serial. |
| Number of batteries connected in parallel. |
| Value of correlated time series at time for node . |
| Value of white noise at time . |
| Mean of load demand time series (kW). |
| Standard deviation of load demand time series (kW). |
| Autocorrelation coefficient. |
| Parameter of consensus algorithm implementation. |
| Normalized load demand at time for node (kW). |
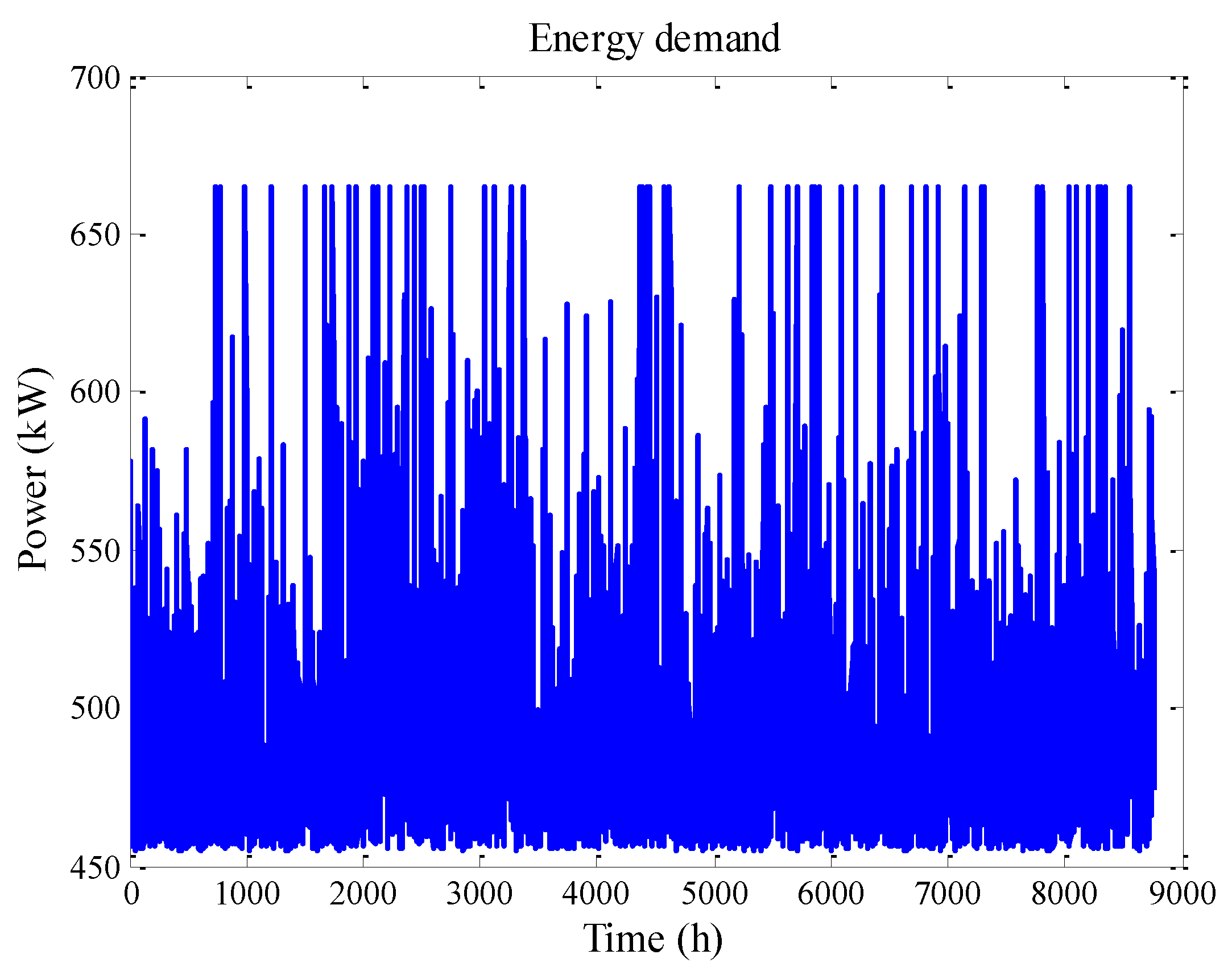
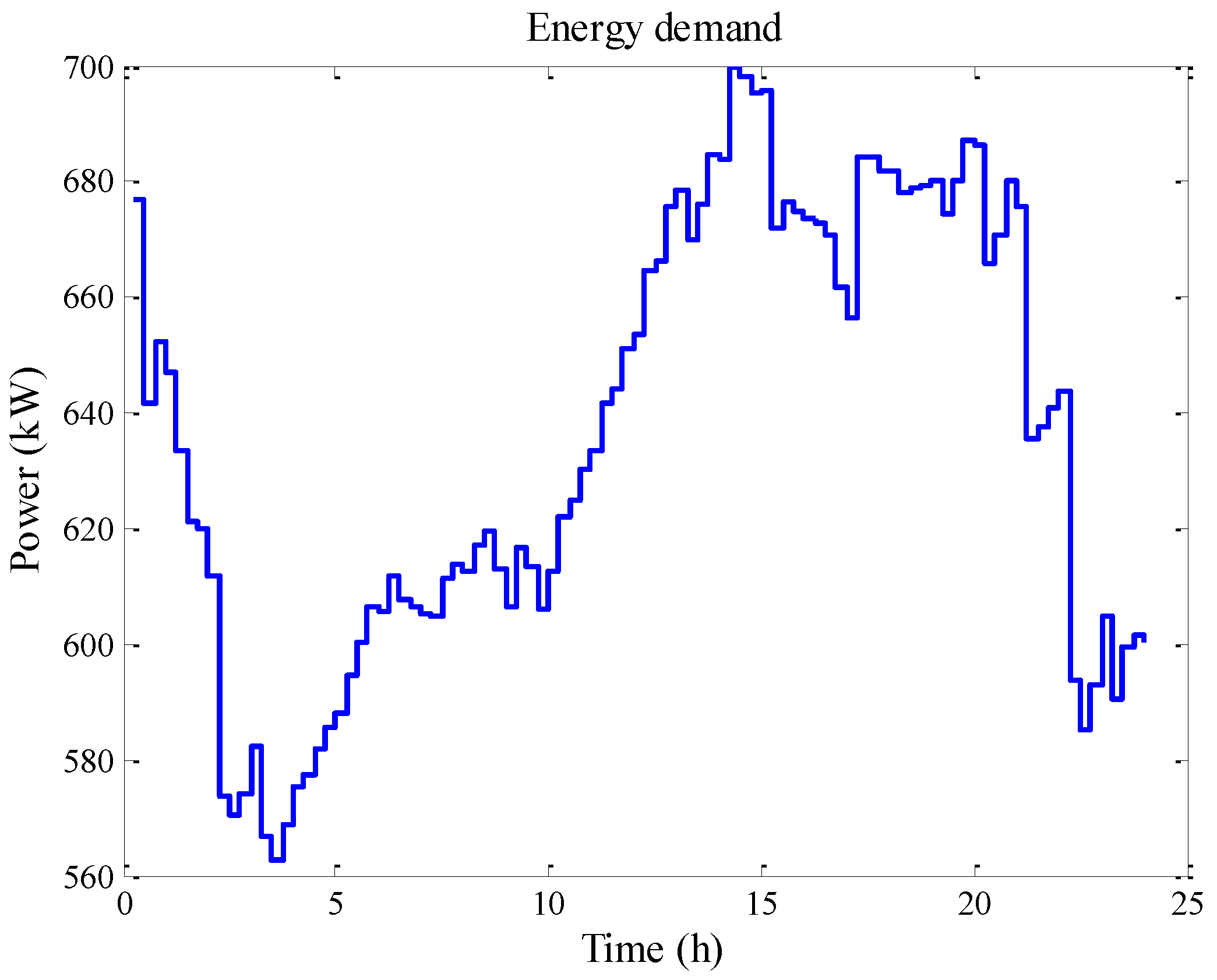
| Load demand at time for node (kW). |
| Correlated and profiled load demand at time for node . |
| Cumulative distribution of time series. |
| Cumulative distribution of time series. |
| Projection operator for dispatch of photovoltaic system. |
| Flow of active power of branch at time (kW). |
| Simulated load demand at time for node (kW). |
| Scaled load demand at time for node (kW). |
| Minimum load demand (kW). |
| Maximum load demand (kW). |
| Photovoltaic cell power at time for generator (W). |
| Rated power of converter of generator (kW). |
| Normalized power of inverter at time for generator . |
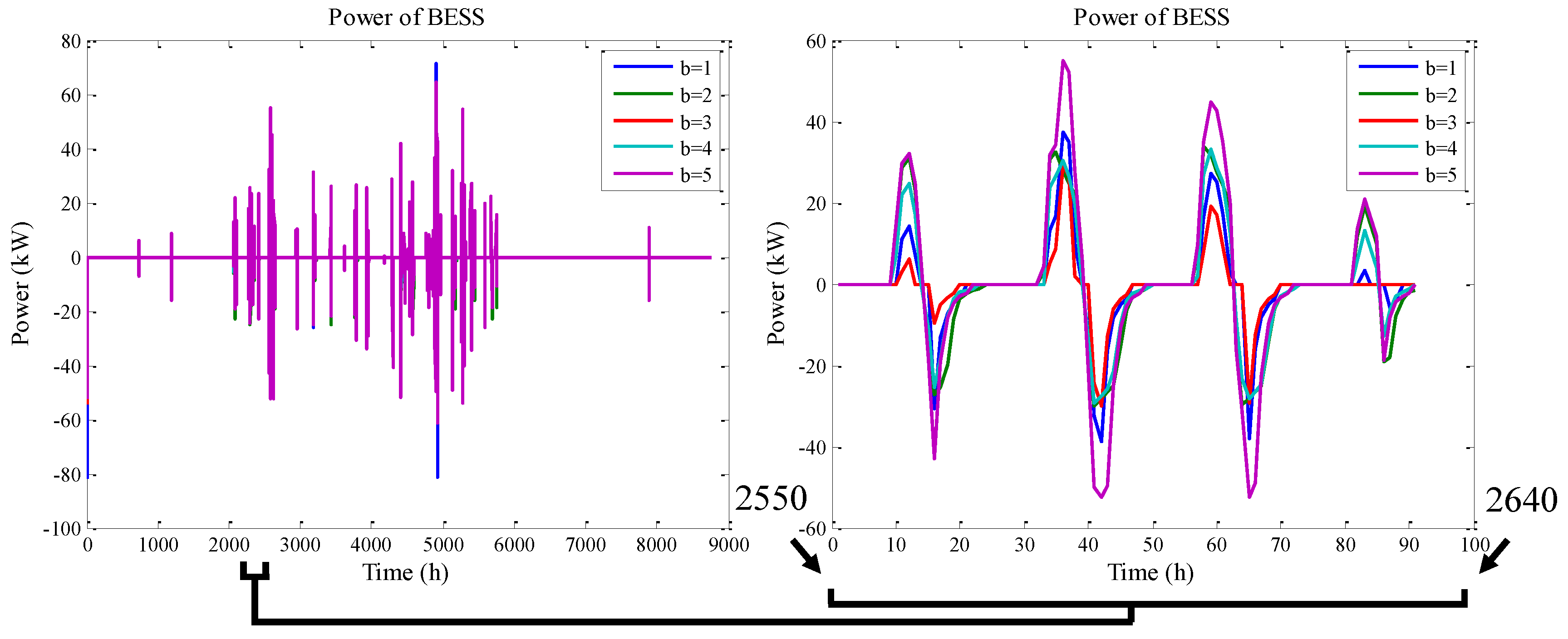
| Power of battery system at time (kW). |
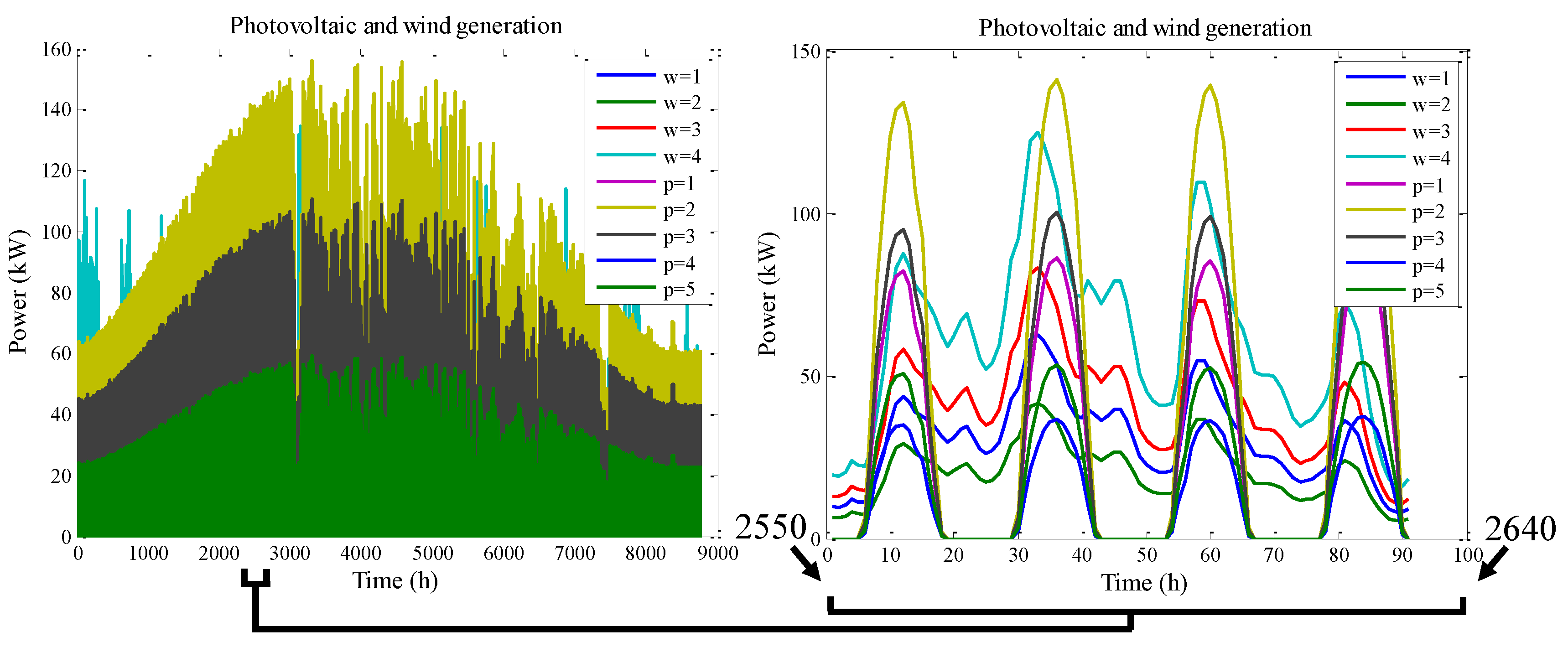
| Maximum power of photovoltaic generator at time (kW). |
| Maximum power of wind generator at time (kW). |
| Maximum charging/discharging power of battery system (kW). |
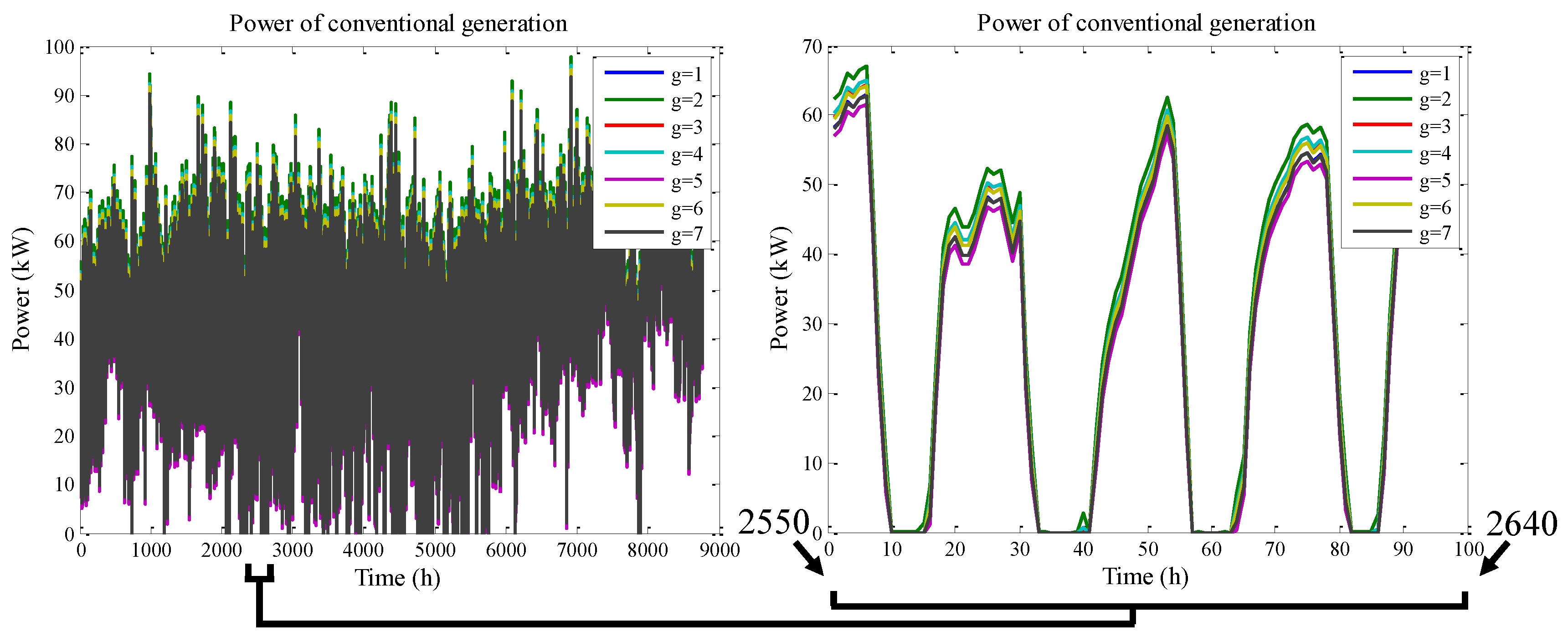
| Minimum power generation of conventional generator (kW). |
| Maximum power generation of conventional generator (kW). |
| Optimal power dispatch of photovoltaic generator at time (kW). |
| Optimal power dispatch of wind generator at time (kW). |
| Optimal power dispatch of battery system at time (kW). |
| Optimal power dispatch of conventional generator at time (kW). |
| Thermal voltage of generator at time (V). |
| Photovoltaic cell open circuit voltage of generator at time (V). |
| Open-circuit voltage under standard conditions of photovoltaic unit (V). |
| Relative photovoltaic cell open circuit voltage at time for generator . |
| Voltage at maximum power production for generator (V). |
| Photovoltaic cell voltage at time for generator (V). |
| Battery charging voltage at time and battery system (V). |
| Battery discharging voltage at time and battery system (V). |
| Battery voltage at time and battery system (V). |
| Maximum allowed voltage of battery system (V). |
| Minimum allowed voltage of battery system (V). |
| Voltage of photovoltaic system (V). |
| Voltage of node of distribution system at time (kV). |
| Short-circuit current at time for generator (A). |
| Short-circuit current under standard conditions at time for generator (A). |
| Current at maximum power production for generator (A). |
| Photovoltaic cell current at time for generator (A). |
| Flow of reactive power of branch at time (kVAr). |
| Maximum fill factor at time for generator . |
| Fill factor of photovoltaic of generator . |
| Photovoltaic cell resistance at time for generator (Ω). |
| , , | Parameters of inverter efficiency model for generator . |
| , , , | Parameters of cost curve of photovoltaic generator . |
| , , , | Parameters of cost curve of wind generator . |
| , , , | Parameters of cost curve of battery system . |
| , , , | Parameters of cost curve of conventional generator . |
| Cell efficiency of generator . |
| Inverter efficiency at time for generator . |
| Battery efficiency at time and battery system . |
| Battery charging efficiency at time and battery system . |
| Battery discharging efficiency at time and battery system . |
| Battery charging voltage efficiency at time . |
| Battery charging power efficiency at time . |
| Battery discharging voltage efficiency at time . |
| Battery discharging power efficiency at time . |
| Cost curve of conventional generator at time ($). |
| Cost curve of conventional generator at time ($). |
| Cost curve of conventional generator at time ($). |
| Cost curve of conventional generator at time ($). |
| Rated capacity of battery system (kWh). |
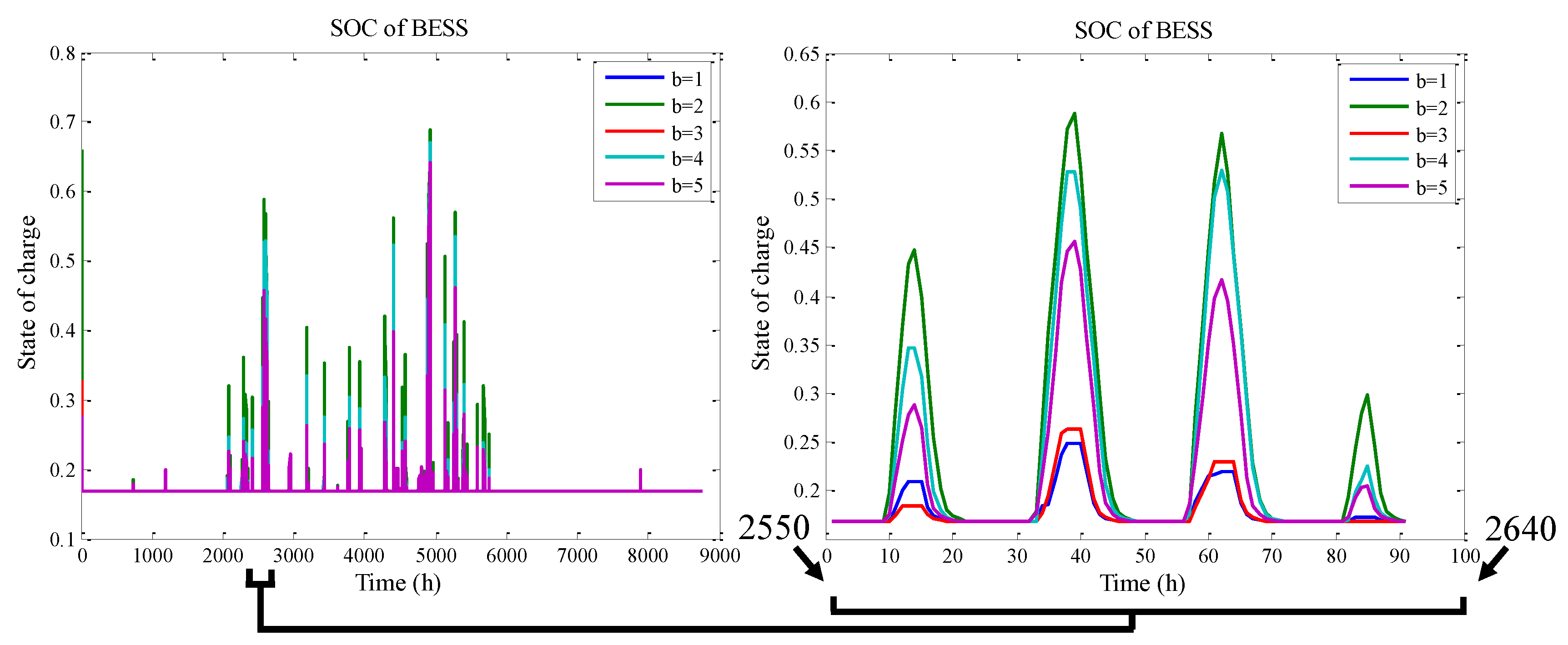
| Battery state of charge at time and battery system . |
| Minimum value of state of charge of battery system . |
| Maximum value of state of charge of battery system . |
| Resistance of branch (Ω). |
| Reactance of branch (Ω). |
| Maximum loadability index at time for node . |
| Power required for avoiding voltage collapse (kVA). |
| , | Matrices related to communication infrastructure of photovoltaic system. |
| Minimum value of incremental cost for photovoltaic system ($/kWh). |
| Maximum value of incremental cost for photovoltaic system ($/kWh). |
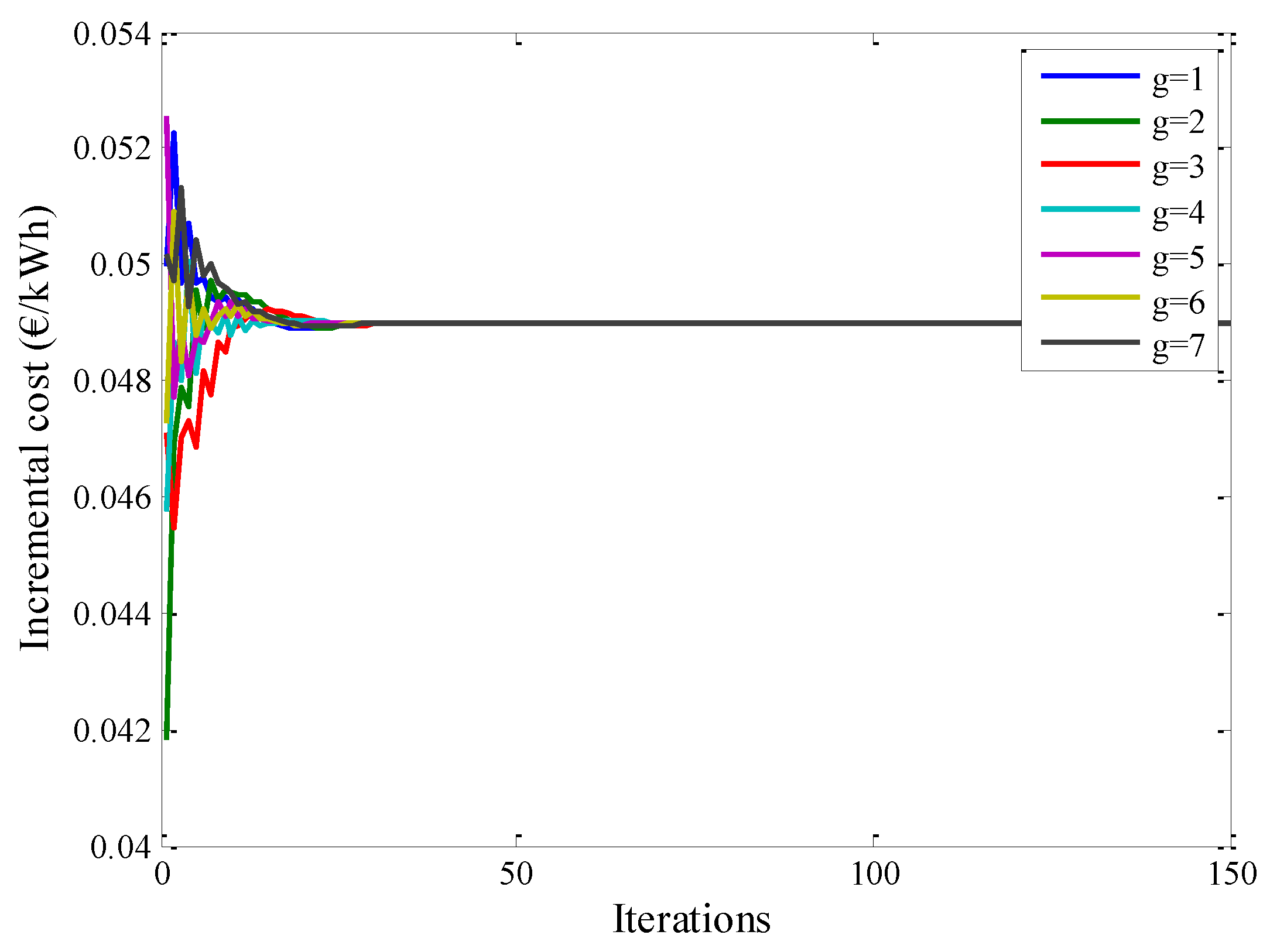
| Vector of photovoltaic incremental cost for iteration ($/kWh). |
| Element of incremental cost vector ($/kWh). |
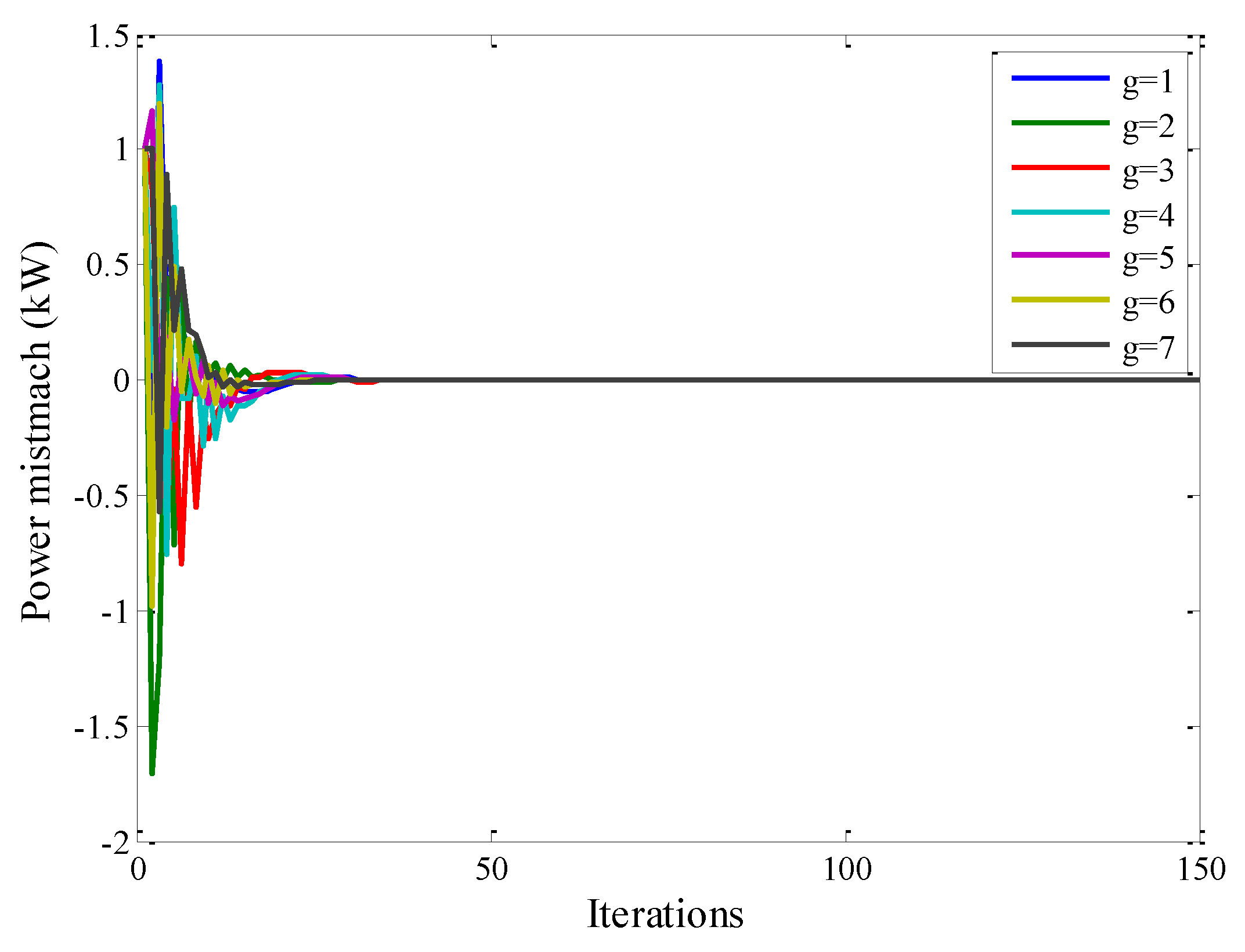
| Vector of power mismatch at iteration (kW). |
| Element of mismatch vector (kW). |
| Vector of power charged/discharged for iteration (kW). |
| Element of power charged/discharged vector (kW). |









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}