Design and Analysis of a Permanent Magnet Synchronous Motor Considering Axial Asymmetric Position of Rotor to Stator †



Abstract
1. Introduction
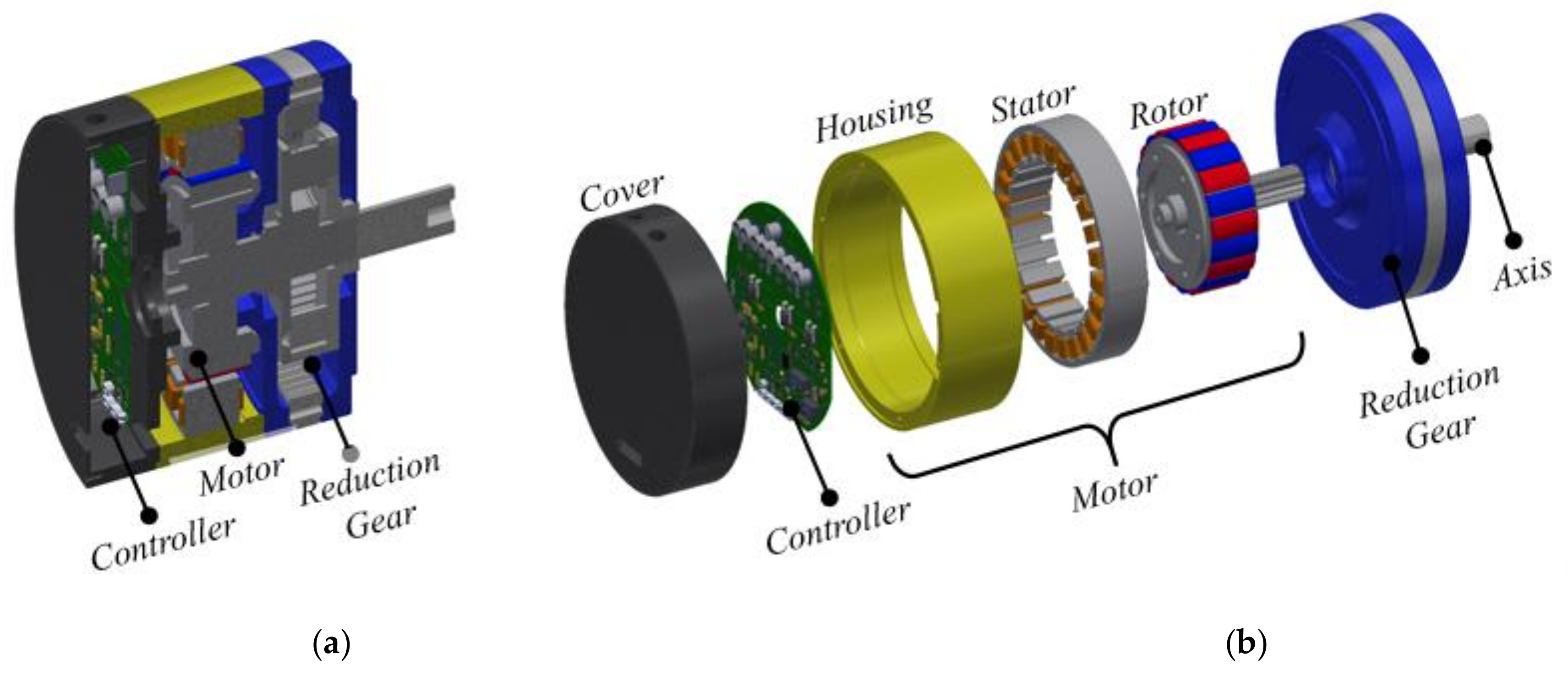
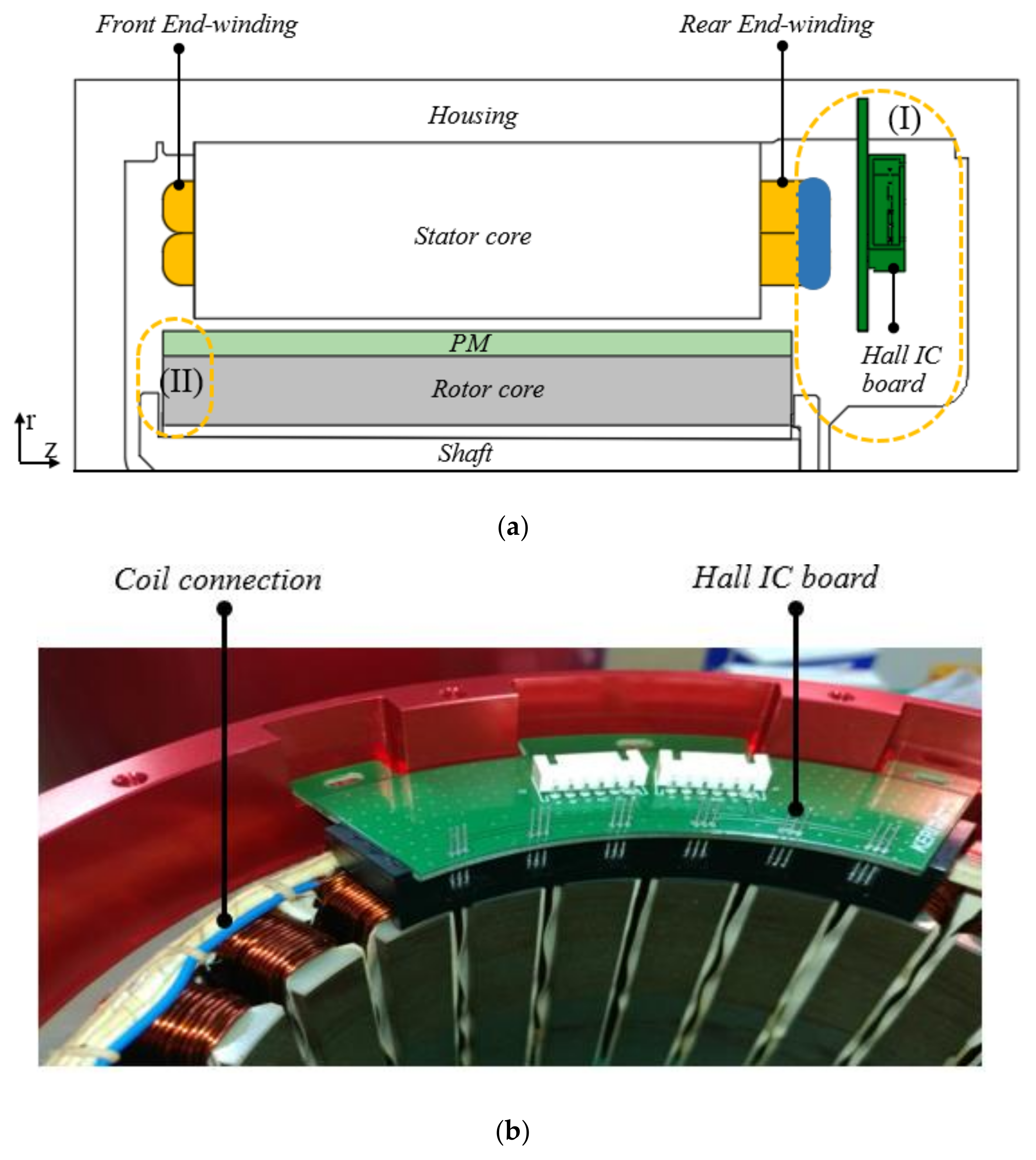
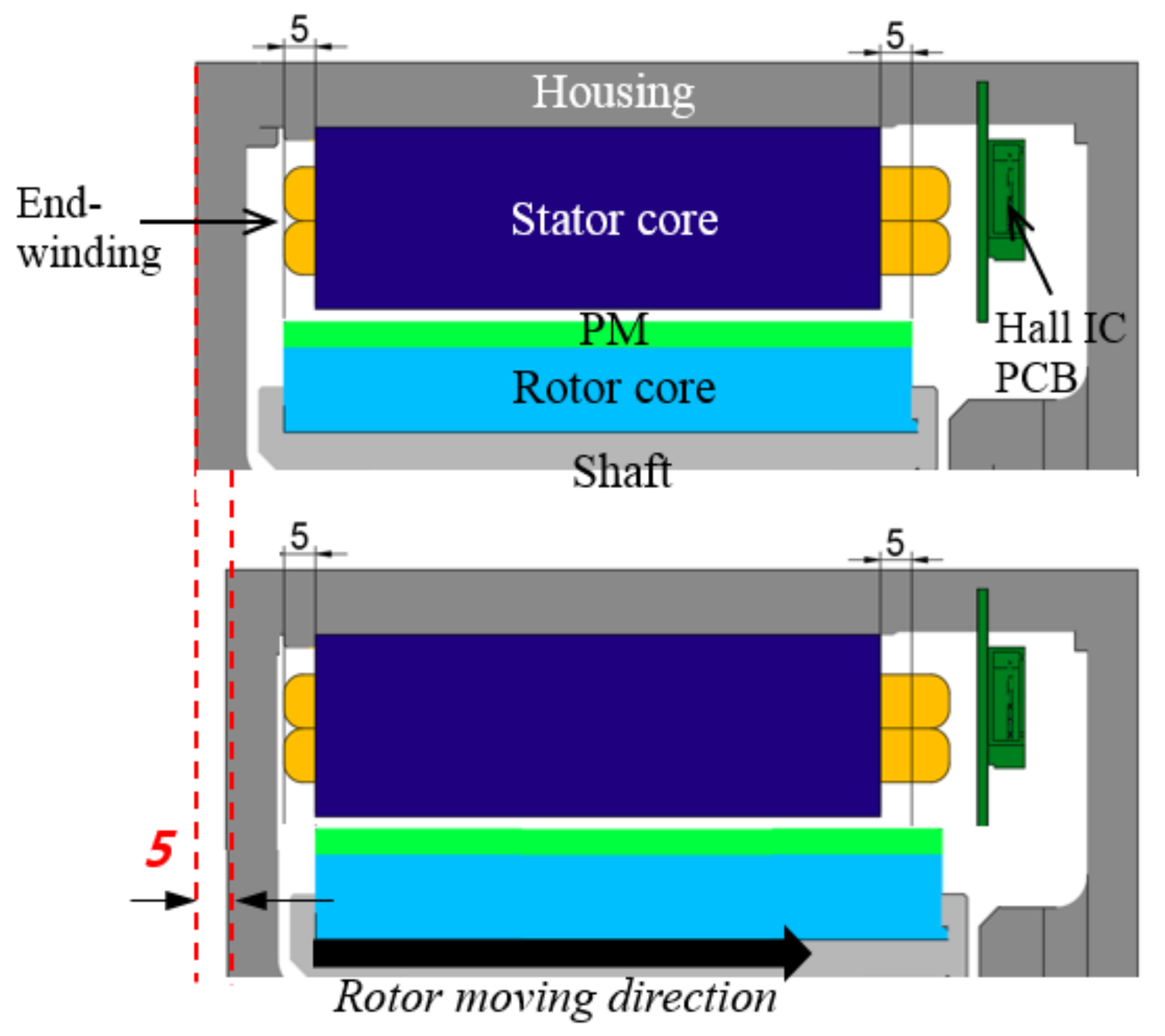
2. Proposed Model Description
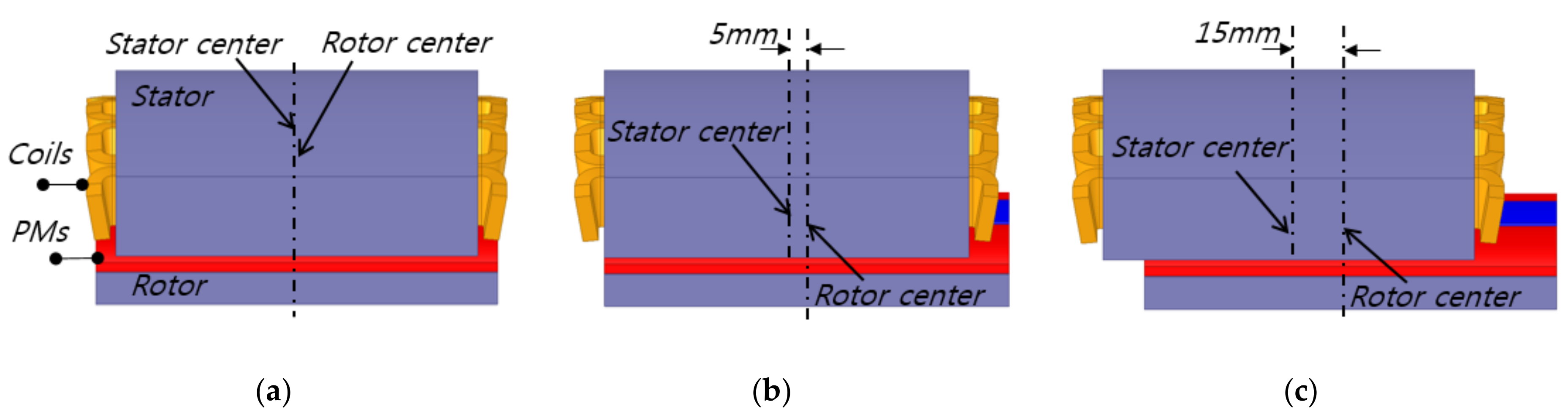
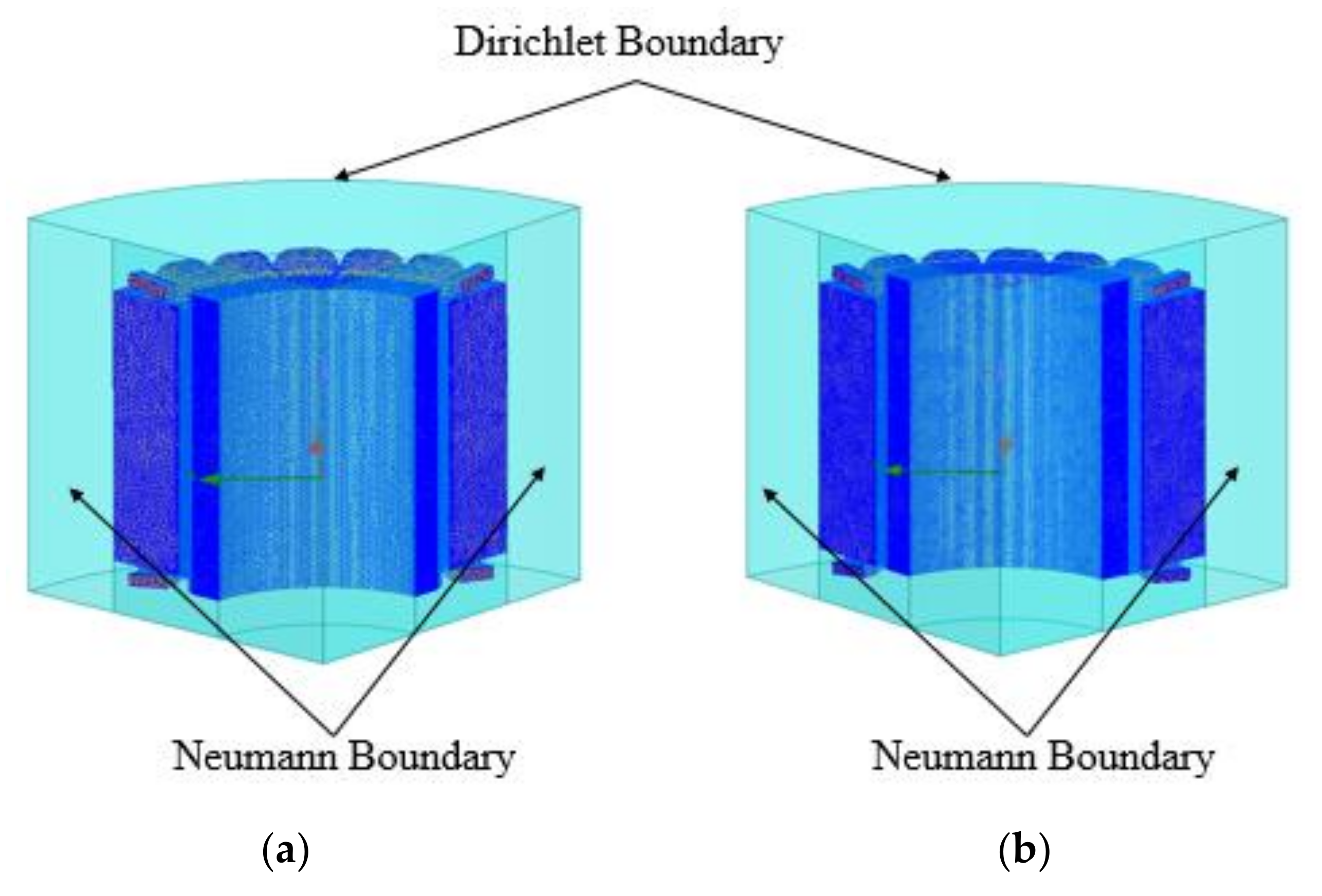
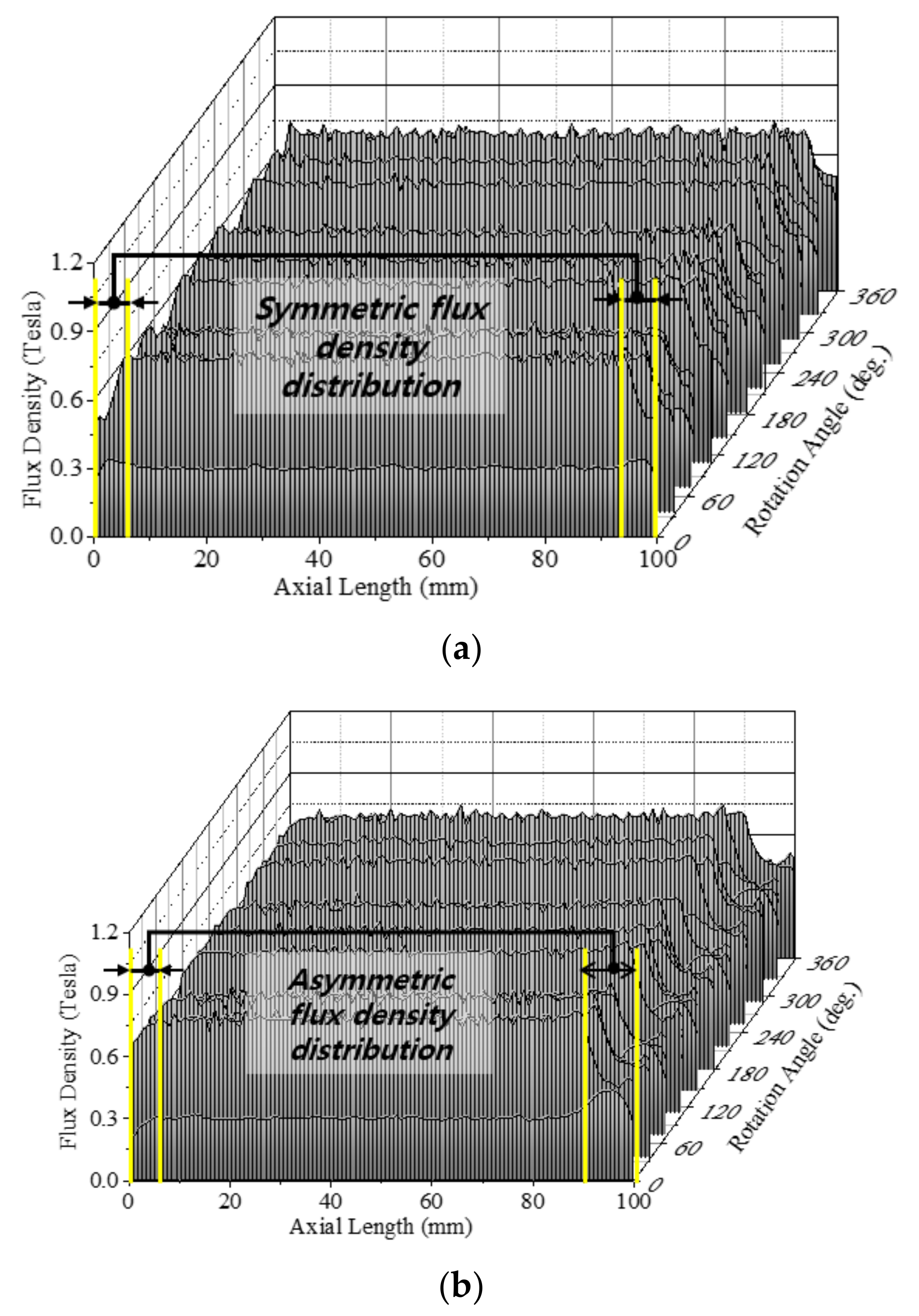
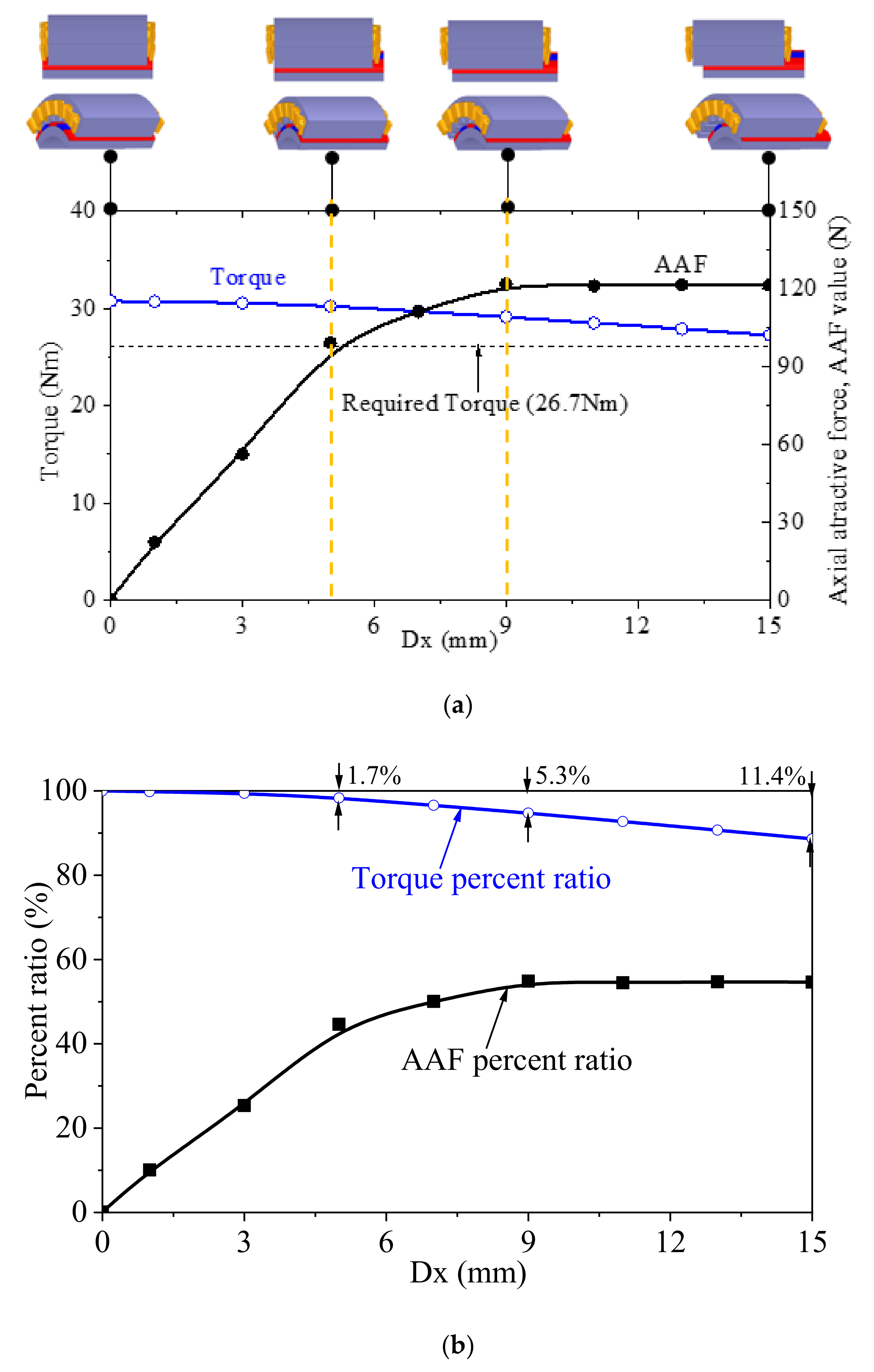
3. AAF Analysis Due to Asymmetric PM Overhang
4. Bearing Selection Considering Axial Attractive Force
- Pr is the dynamic equivalent radial load N,
- Fr is the actual radial load N,
- Fa is the actual axial load N,
- X is the radial load factor,
- Y is the axial load factor, and
- V is the rotational factor.
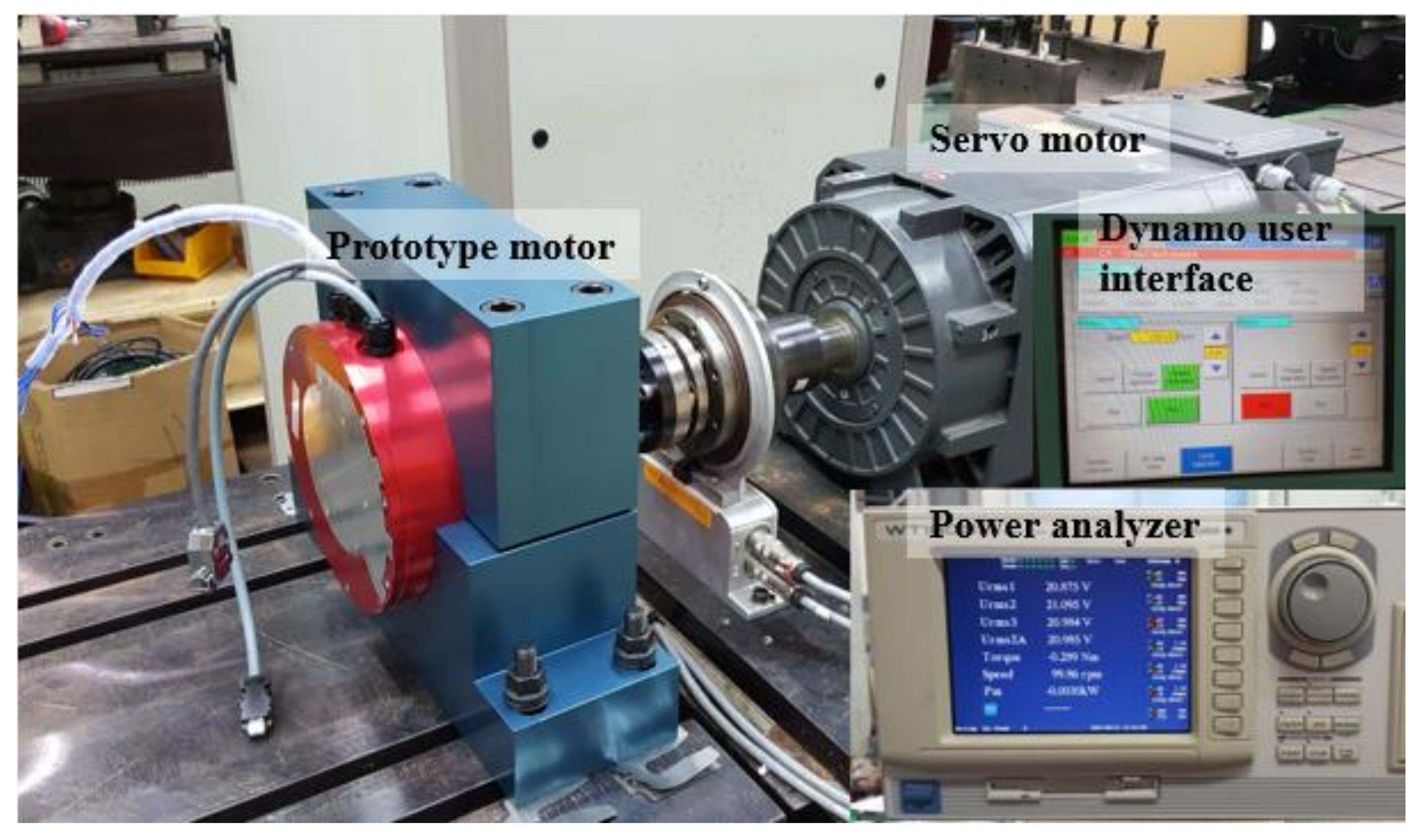
5. Experimental Validation
5.1. Resistance and Back Electromotive Force Comparison
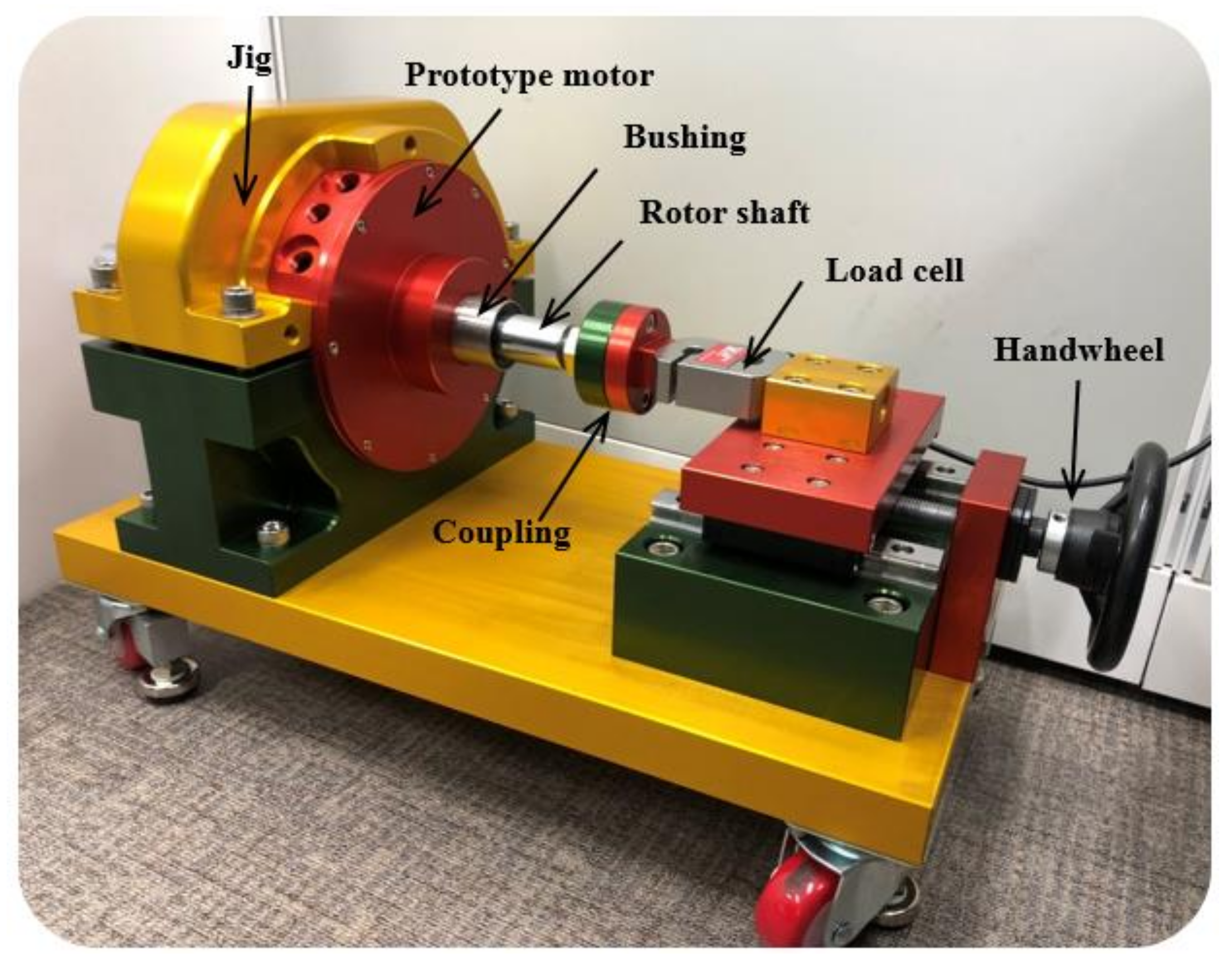
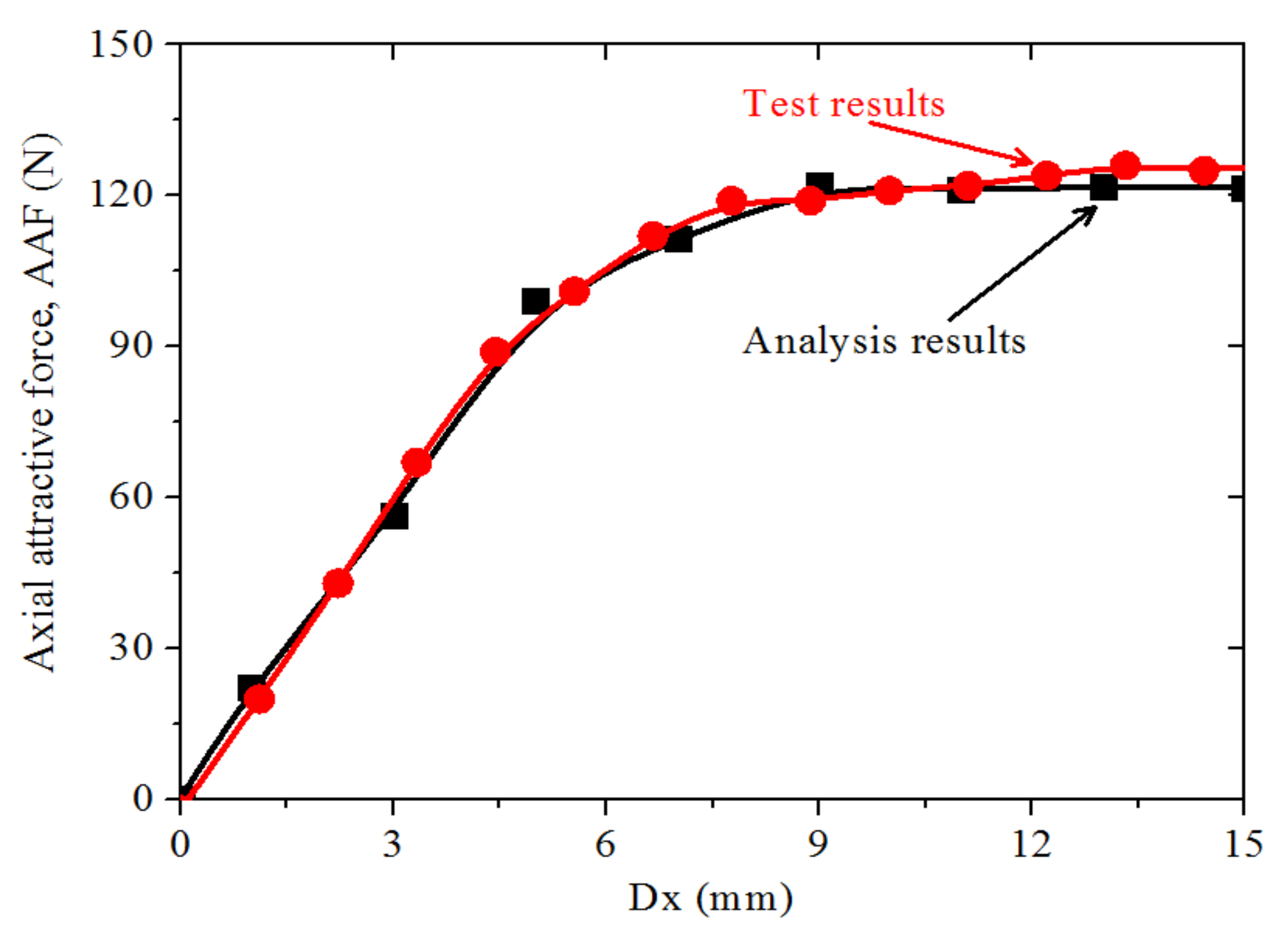
5.2. Measurement of Axial Attractive Force
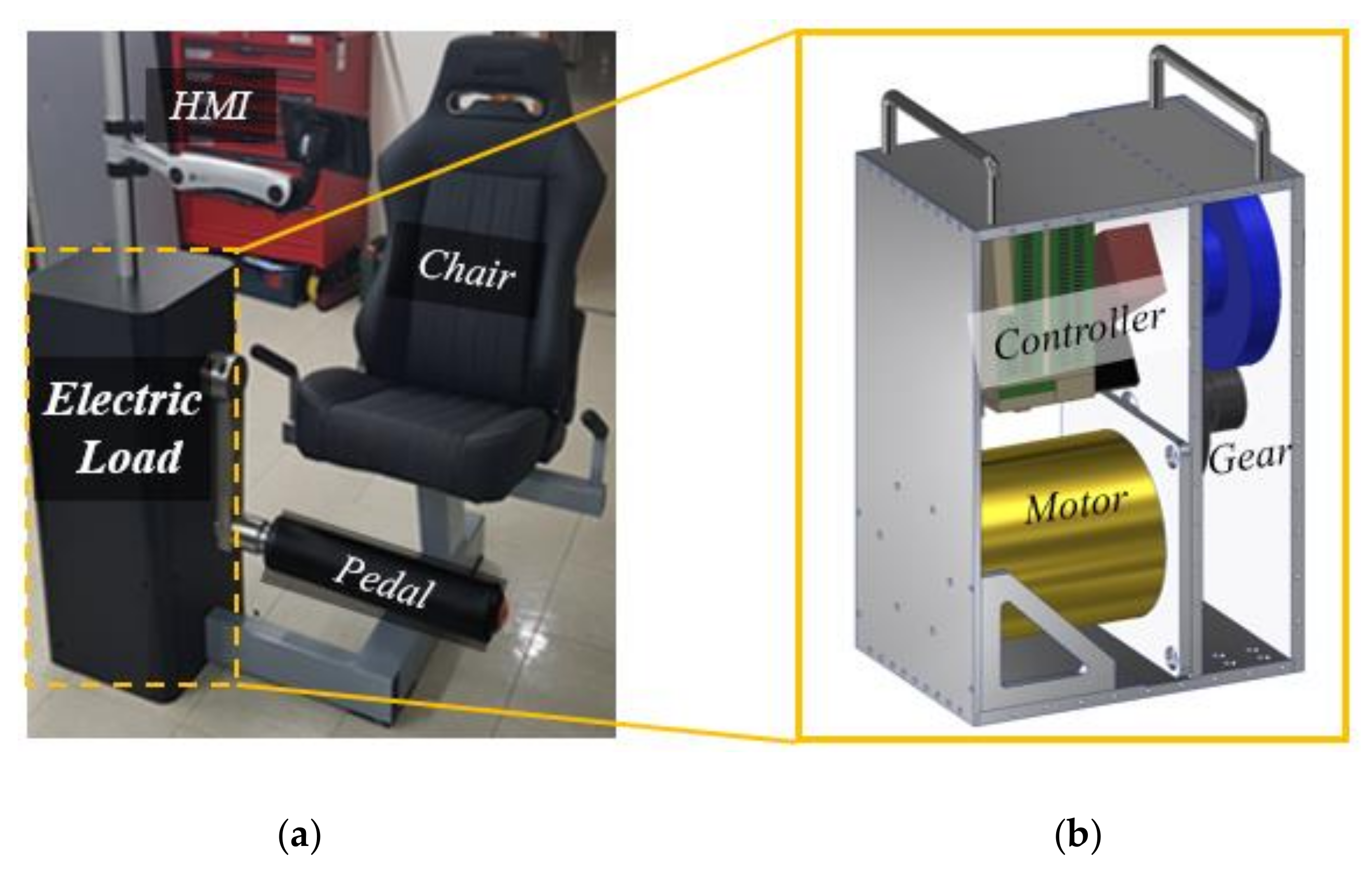
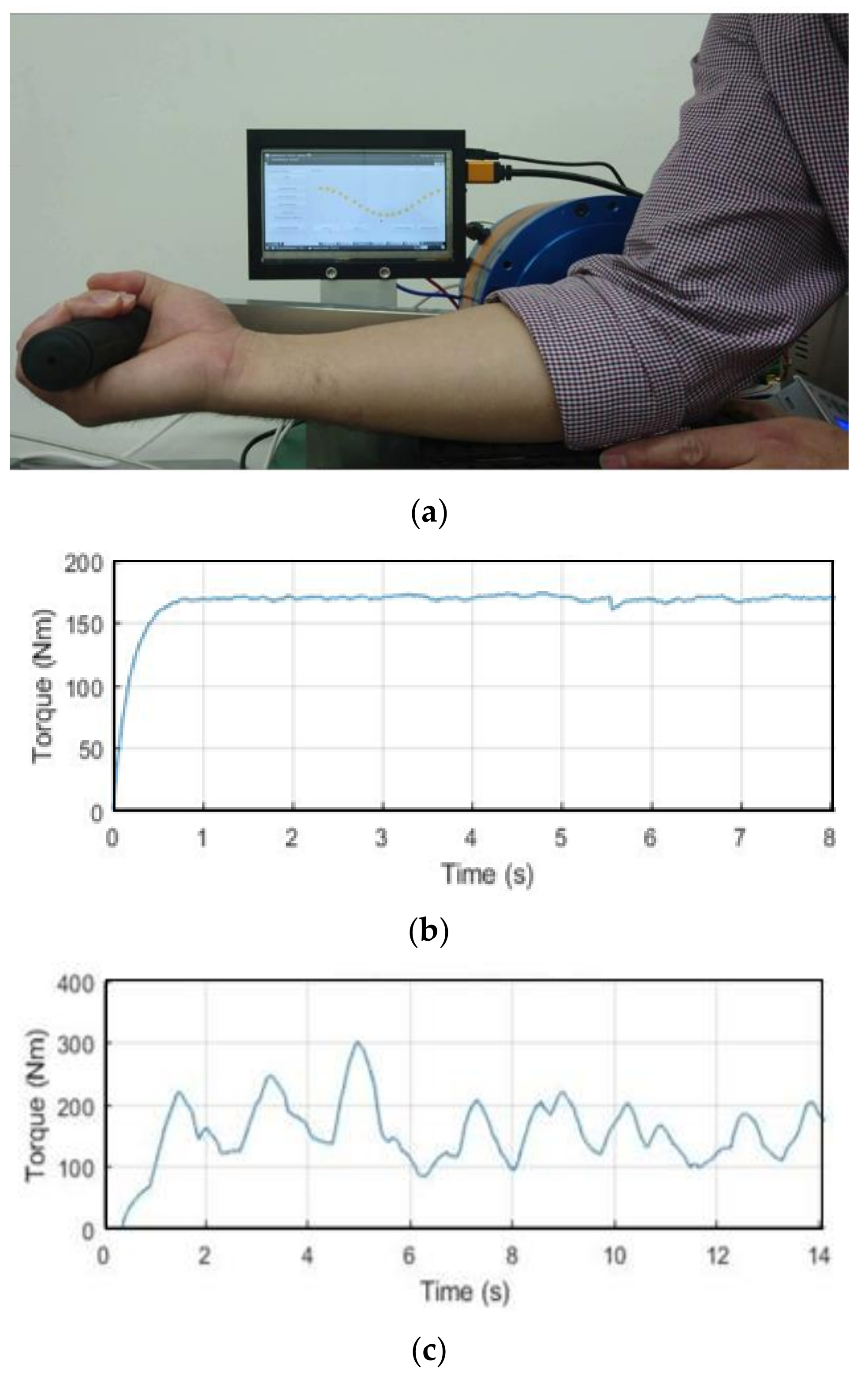
5.3. Isokinetic Exercise Machine Test
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kikuchi, T.; Oda, K.; Ohyama, Y.; Isozumi, S.; Furusho, J. Development of isokinetic exercise system using high performance MR fluid brake. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar]
- Luu, P.T.; Lee, J.-Y.; Lee, J.-H.; Park, J.-W. Electromagnetic and Thermal Analysis of Permanent-Magnet Synchronous Motors for Cooperative Robot Applications. IEEE Trans. Magn. 2019. [Google Scholar] [CrossRef]
- Kim, K.-C.; Koo, D.-H.; Lee, J. The Study on the Overhang Coefficient for Permanent Magnet Machine by Experimental Design Method. IEEE Trans. Magn. 2007, 43, 2483–2485. [Google Scholar] [CrossRef]
- Woo, D.-K.; Jeong, B.H. Irreversible Demagnetization of Permanent Magnet in a Surface-Mounted Permanent Magnet Motor with Overhang Structure. IEEE Trans. Magn. 2016, 52, 1–6. [Google Scholar] [CrossRef]
- Kang, G.-H.; Son, Y.-D.; Kim, G.-T. The Noise and Vibration Analysis of BLDC Motor Due to Asymmetrical Permanent-Magnet Overhang Effects. IEEE Trans. Ind. Appl. 2008, 44, 1569–1577. [Google Scholar] [CrossRef]
- Chun, J.-D.; Lee, J.; Wakao, S. Overhang effect analysis of brushless DC motor by 3-D equivalent magnetic circuit network method. IEEE Trans. Magn. 2003, 39, 1610–1613. [Google Scholar] [CrossRef]
- Lee, J.-Y.; Hong, D.-K.; Woo, B.-C.; Joo, D.-S.; Chio, Y.-H.; Nam, B.-U. Unbalanced Magnetic Force Calculation for Assembly Jig Design. IEEE Trans. Magn. 2012, 48, 4224–4227. [Google Scholar] [CrossRef]
- Woo, D.-K.; Lim, D.-K.; Yeo, H.-K.; Ro, J.-S.; Jung, H.-K. A 2-D Finite-Element Analysis for a Permanent Magnet Synchronous Motor Taking an Overhang Effect into Consideration. IEEE Trans. Magn. 2013, 49, 4894–4899. [Google Scholar] [CrossRef]
- Seo, J.-M.; Jung, I.-S.; Jung, H.-K.; Ro, J.-S. Analysis of Overhang Effect for a Surface-Mounted Permanent Magnet Machine Using a Lumped Magnetic Circuit Model. IEEE Trans. Magn. 2014, 50, 1–7. [Google Scholar]
- Song, J.-Y.; Lee, J.H.; Kim, Y.-J.; Jung, S.-Y. Computational Method of Effective Remanence Flux Density to Consider PM Overhang Effect for Spoke-Type PM Motor With 2-D Analysis Using Magnetic Energy. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Yu, D.; Huang, X.; Wu, L.; Fang, Y. Design and Analysis of Outer Rotor Permanent-Magnet Vernier Machines with Overhang Structure for In-Wheel Direct-Drive Application. Energies 2019, 12, 1238. [Google Scholar] [CrossRef]
- Kim, W.-H.; Jang, I.-S.; Jin, C.-S.; Lee, J.; Lee, S.-G. Design of Novel Overhang Structure for Separated Pole-Piece Type Ferrite Magnet Motor. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar]
- Yeo, H.-K.; Lim, D.-K.; Woo, D.-K.; Ro, J.-S.; Jung, H.-K. Magnetic Equivalent Circuit Model Considering Overhang Structure of a Surface-Mounted Permanent-Magnet Motor. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar]
- Yeo, H.-K.; Lim, D.-K.; Jung, H.-K. Magnetic Equivalent Circuit Model Considering the Overhang Structure of an Interior Permanent-Magnet Machine. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Park, J.-H.; Jung, K.-T.; Jung, Y.-H.; Lim, M.-S.; Yoon, M.-H.; Hong, J.-P.; Jung, J.-W. Design and Verification for the Torque Improvement of a Concentrated Flux-Type Synchronous Motor for Automotive Applications. IEEE Trans. Ind. Appl. 2019, 55, 3534–3543. [Google Scholar] [CrossRef]
- Lee, J.-G.; Yeo, H.-K.; Jung, H.-K.; Kim, T.-K.; Ro, J.-S. Electromagnetic and thermal analysis and design of a novel-structured surface-mounted permanent magnet motor with high-power-density. IET Electr. Power Appl. 2019, 13, 472–478. [Google Scholar] [CrossRef]
- Luu, P.T.; Lee, J.-Y.; Hwang, W.; Woo, B.-C. A Design Approach Considering Axial Asymmetry Position of Rotor to Stator in Permanent Magnet Synchronous Motor for Compact Size. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018; pp. 37–40. [Google Scholar]
- Ansys Corporation. “Maxwell online help”, Maxwell 18.0. Available online: https://www.scribd.com/document/370055766/Ansys-Maxwell-18-Online-Help (accessed on 23 October 2019).
- Park, C.H.; Ham, S.Y.; Hong, D.E.; Kim, J.K. Development of High Speed Spindle for Machine Tool with Magnetic Bearings. Trans. Korean Soc. Noise Vib. Eng. 2015, 25, 895–900. [Google Scholar] [CrossRef]
- NTN Bearing Corporation. “Ball and Roller Bearing Catalog”. Available online: http://www.ntnamericas.com/en/brochures-and-literature/catalogs/164 (accessed on 23 October 2019).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Value | Unit | |
|---|---|---|---|
| Output requirement | Rated output power (Continuous operation) | 1.5 | kW |
| Maximum output power (instantaneous operation, 30s) | 4.5 | kW | |
| Rated speed | 540 | rpm | |
| Rated torque | 26.7 | Nm | |
| Dimensions | Stator outer diameter | 180 | mm |
| Rotor inner diameter | 90 | mm | |
| Length of stator | 90 | mm | |
| Length of rotor | 100 | mm | |
| Air gap | 2 | mm | |
| Cooling type | Natural cooling | ||
| Parameters | Unit | Calculated Value | Measured Value | Error (%) |
|---|---|---|---|---|
| Phase resistance | Ω | 0.66 | 0.664 | 0.6 |
| Phase back EMF constant | Vrms/rpm | 0.13 | 0.12 | 4.6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luu, P.T.; Lee, J.-Y.; Lee, J.-H.; Woo, B.-C. Design and Analysis of a Permanent Magnet Synchronous Motor Considering Axial Asymmetric Position of Rotor to Stator. Energies 2019, 12, 4816. https://doi.org/10.3390/en12244816
Luu PT, Lee J-Y, Lee J-H, Woo B-C. Design and Analysis of a Permanent Magnet Synchronous Motor Considering Axial Asymmetric Position of Rotor to Stator. Energies. 2019; 12(24):4816. https://doi.org/10.3390/en12244816
Chicago/Turabian StyleLuu, Phuong Thi, Ji-Young Lee, Ji-Heon Lee, and Byung-Chul Woo. 2019. "Design and Analysis of a Permanent Magnet Synchronous Motor Considering Axial Asymmetric Position of Rotor to Stator" Energies 12, no. 24: 4816. https://doi.org/10.3390/en12244816
APA StyleLuu, P. T., Lee, J.-Y., Lee, J.-H., & Woo, B.-C. (2019). Design and Analysis of a Permanent Magnet Synchronous Motor Considering Axial Asymmetric Position of Rotor to Stator. Energies, 12(24), 4816. https://doi.org/10.3390/en12244816