Multi-Frequency Single Loop Passivity-Based Control for LC-Filtered Stand-Alone Voltage Source Inverter



Abstract
:
1. Introduction
2. Mathematical Model and Conventional PBC of LC-Filtered VSI
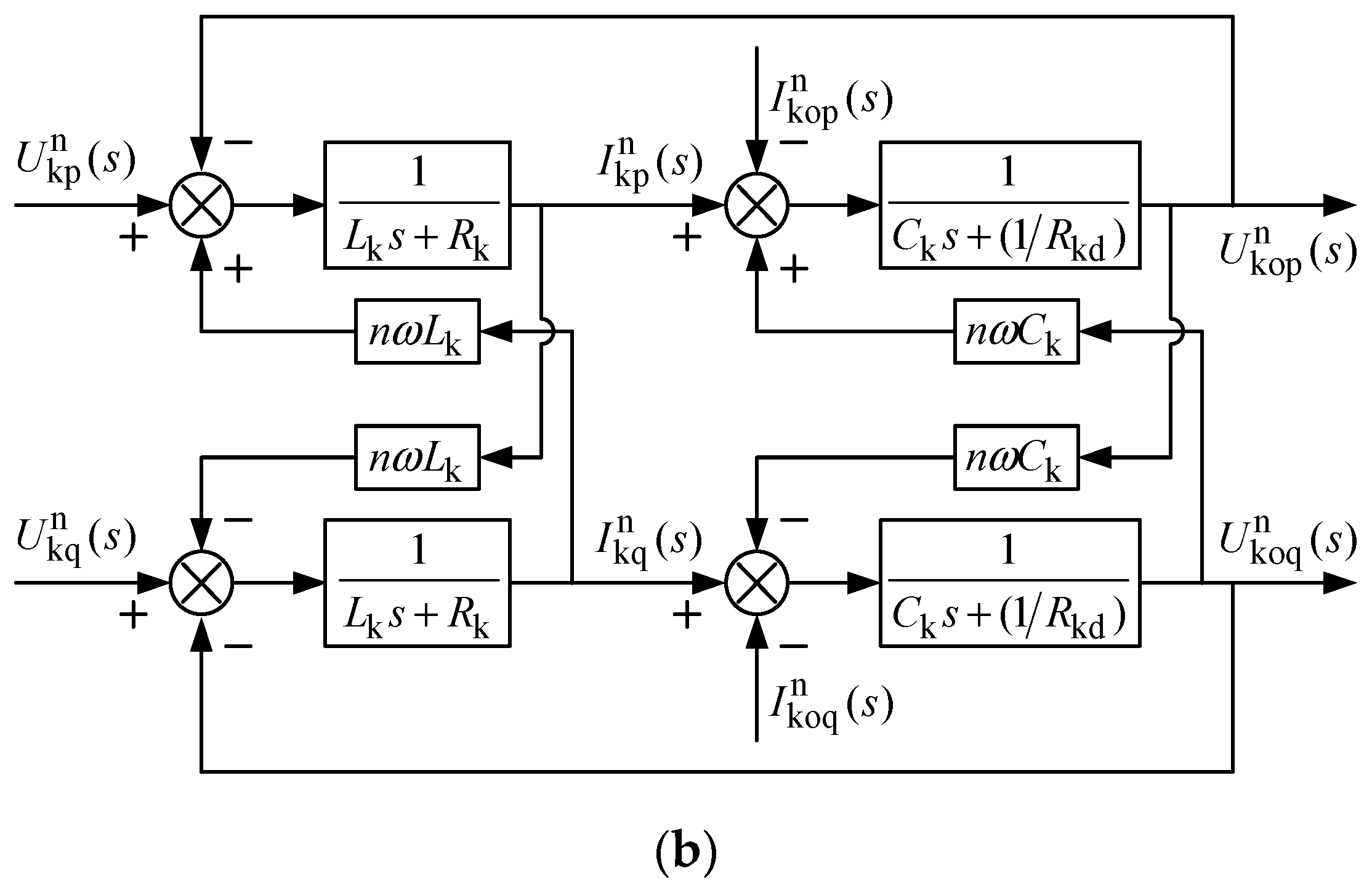
2.1. Mathematical Model of LC-Filtered VSI
2.2. C-PBC Controller for LC-Filtered VSI
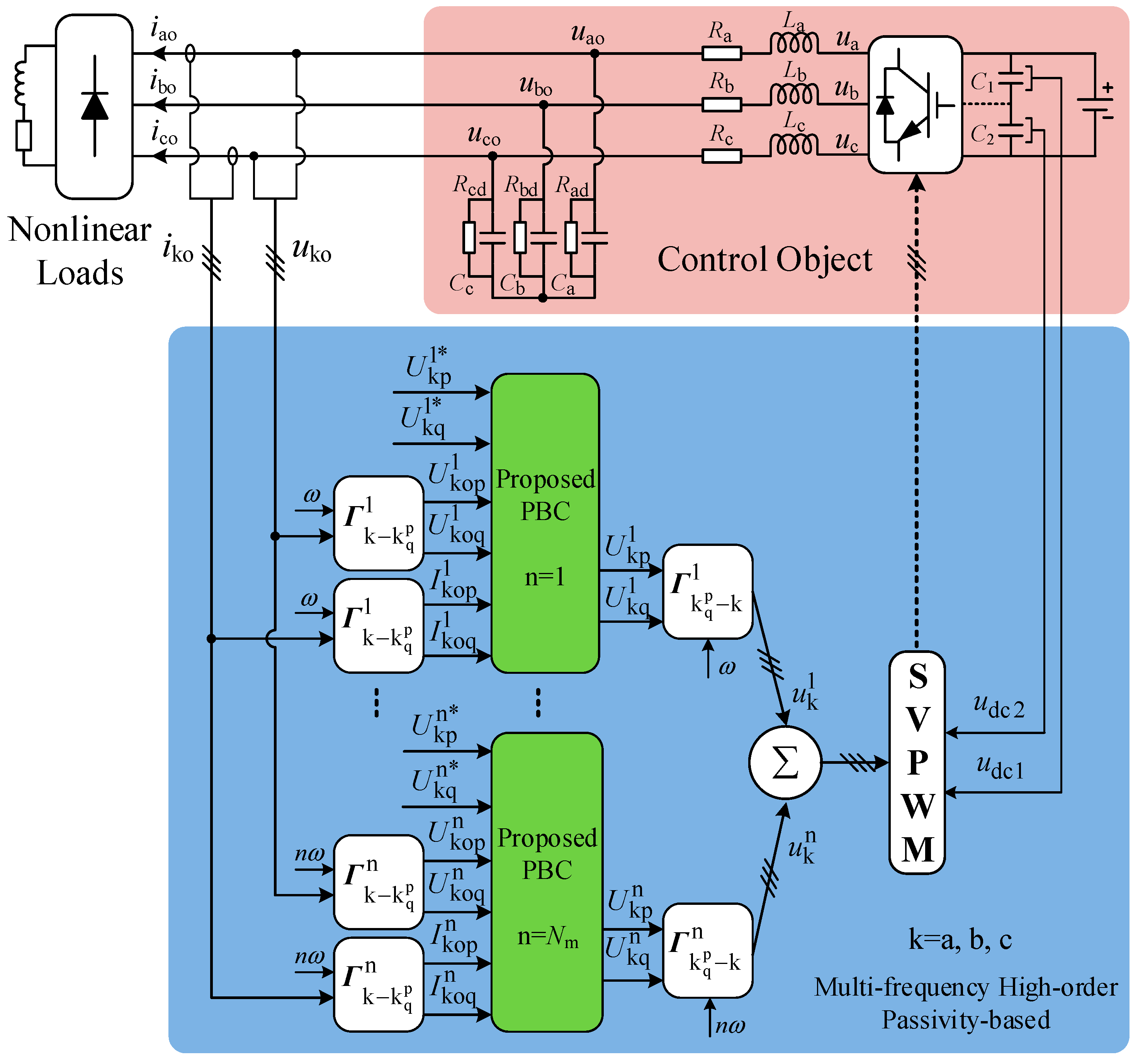
3. Modified Multi-Frequency Single Loop PBC Controller
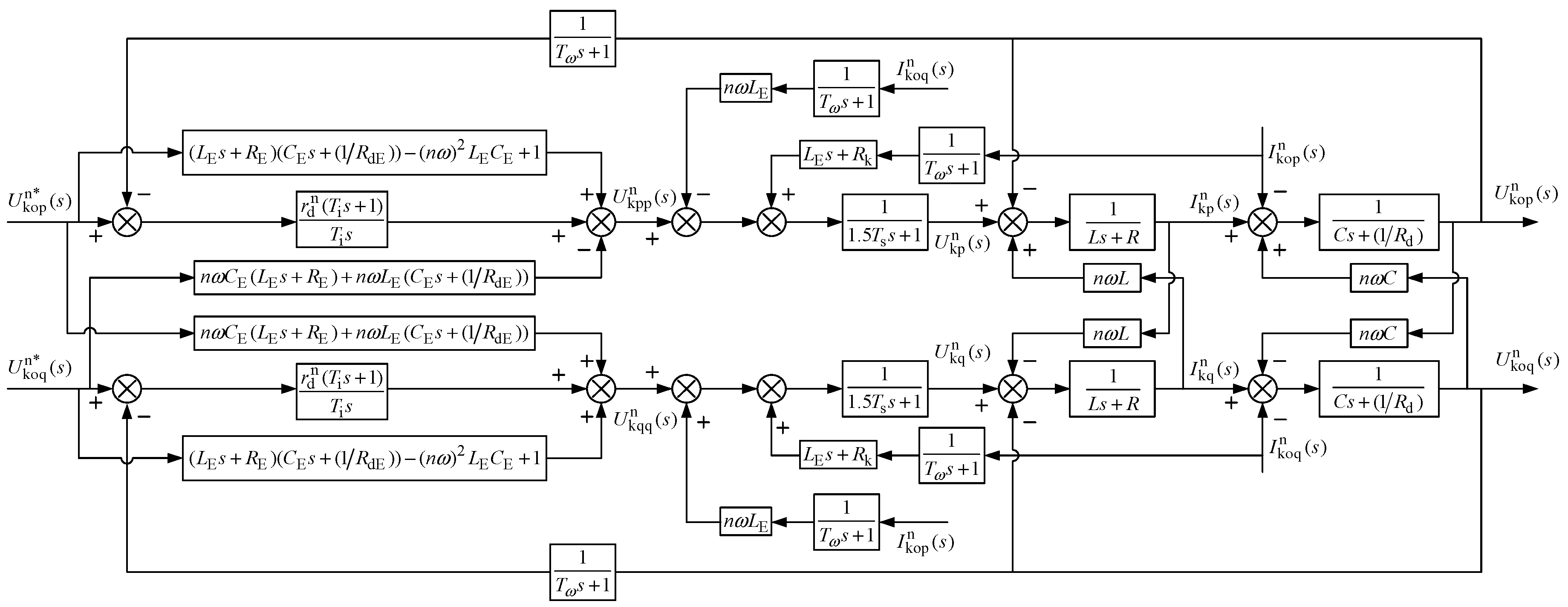
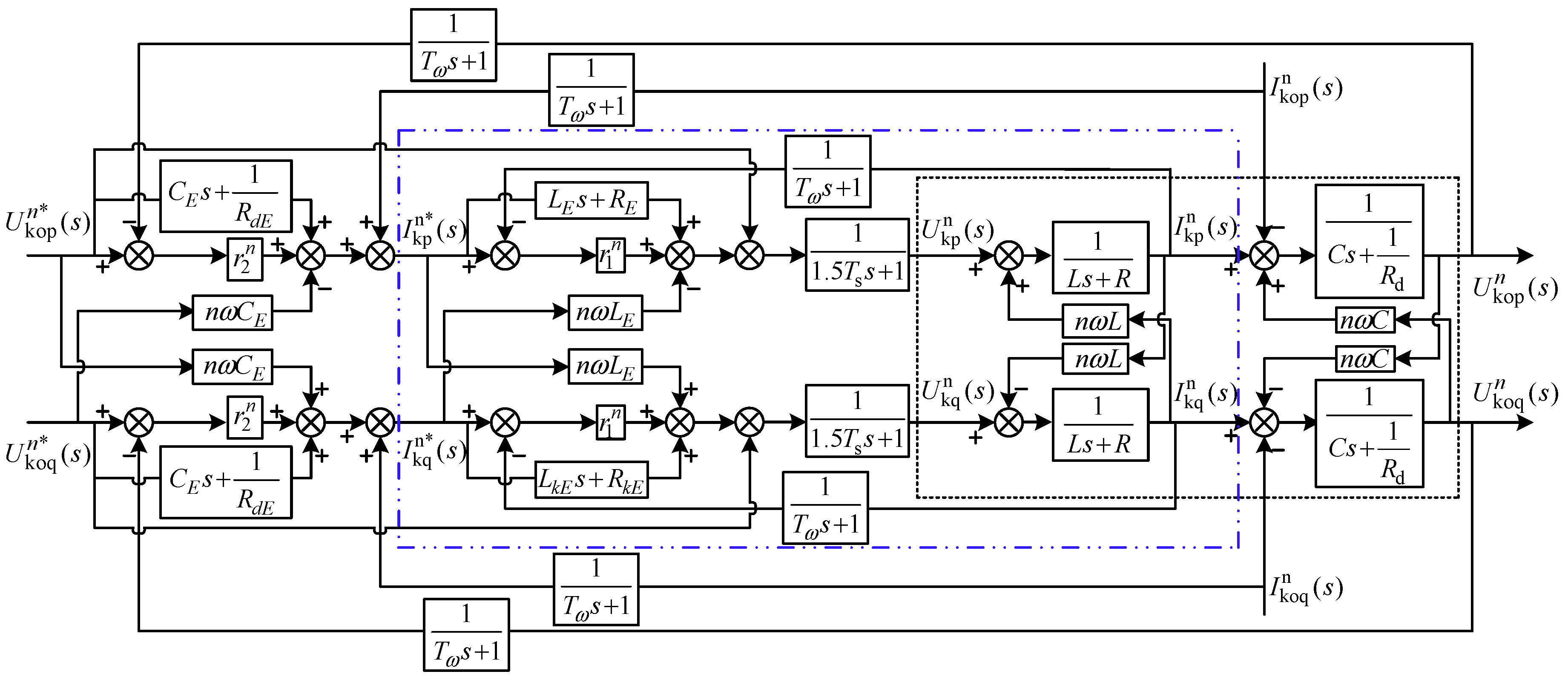
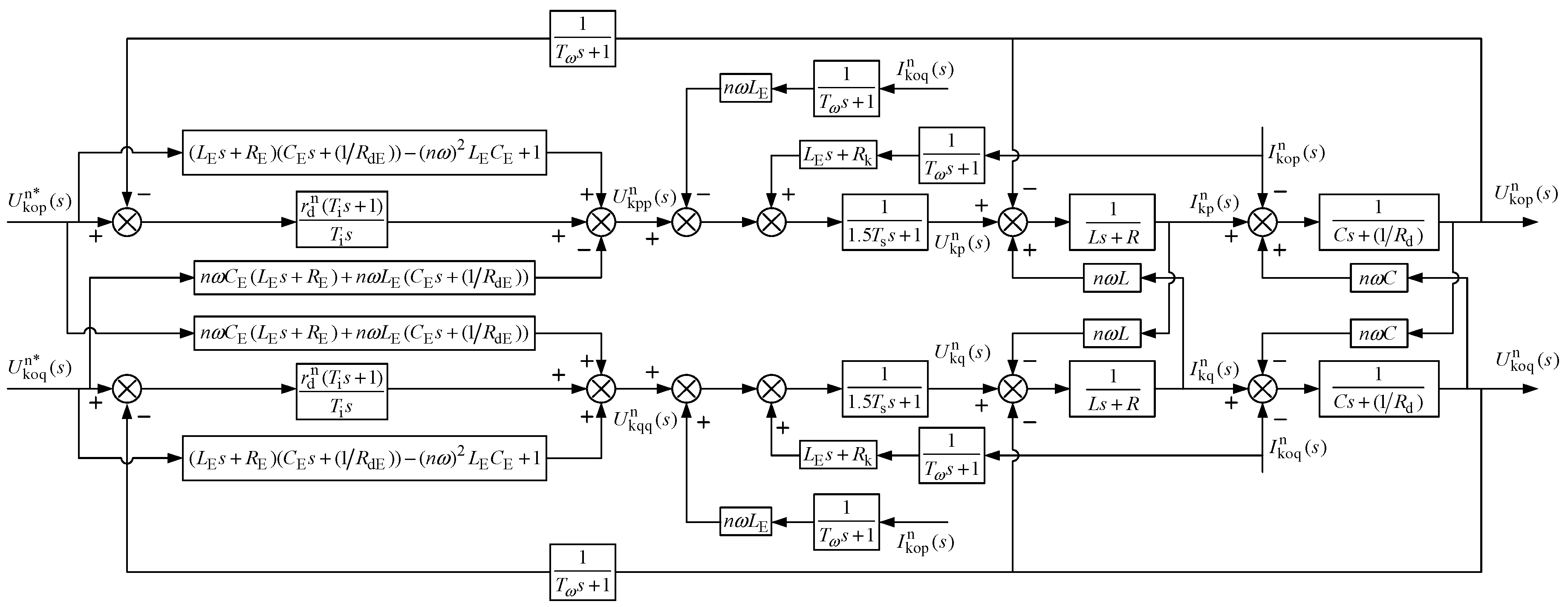
3.1. Multi-Frequency Single Loop PBC Control Law
3.2. Control Parameter Selection for the Multi-Frequency Single Loop PBC Controller
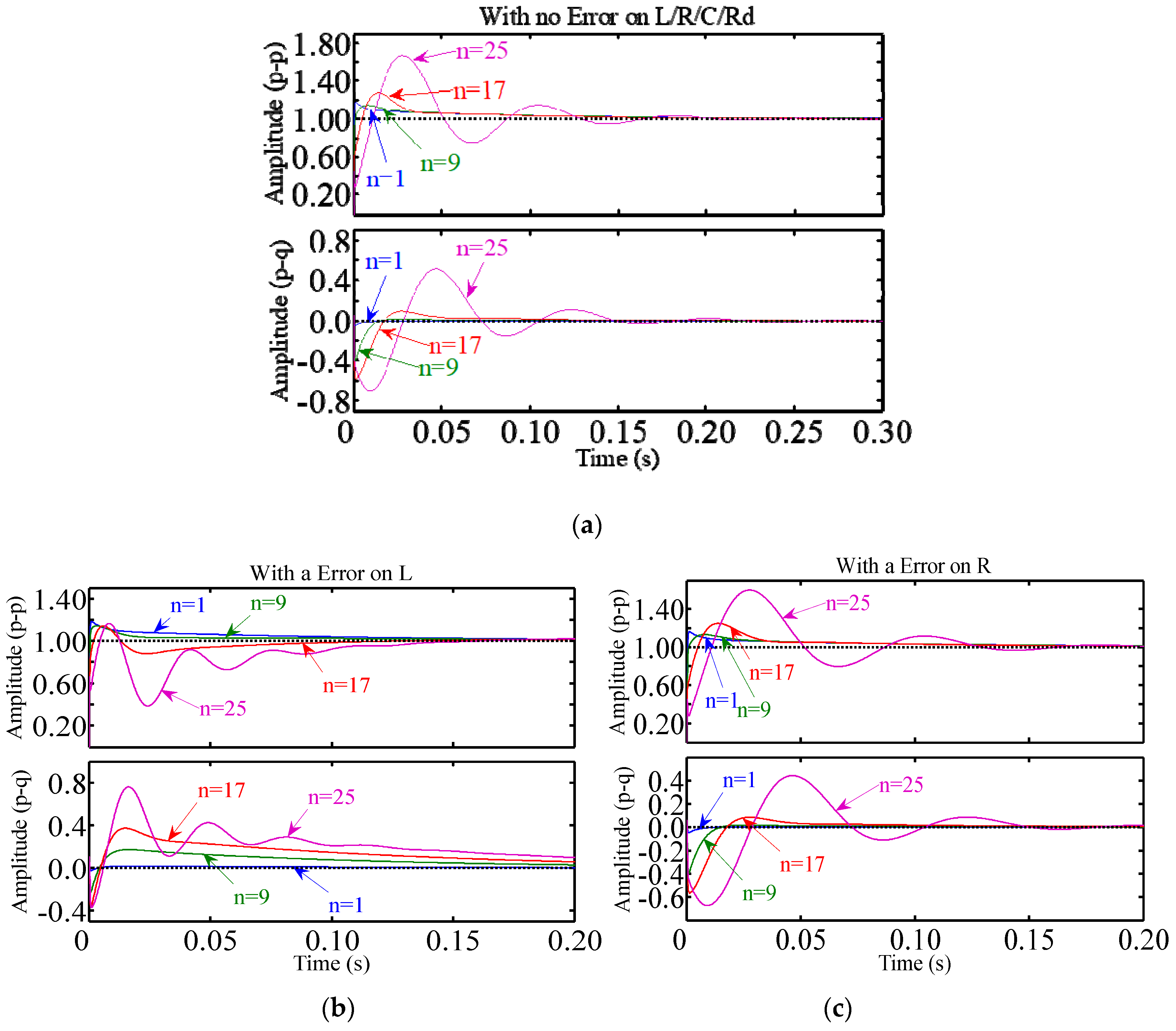
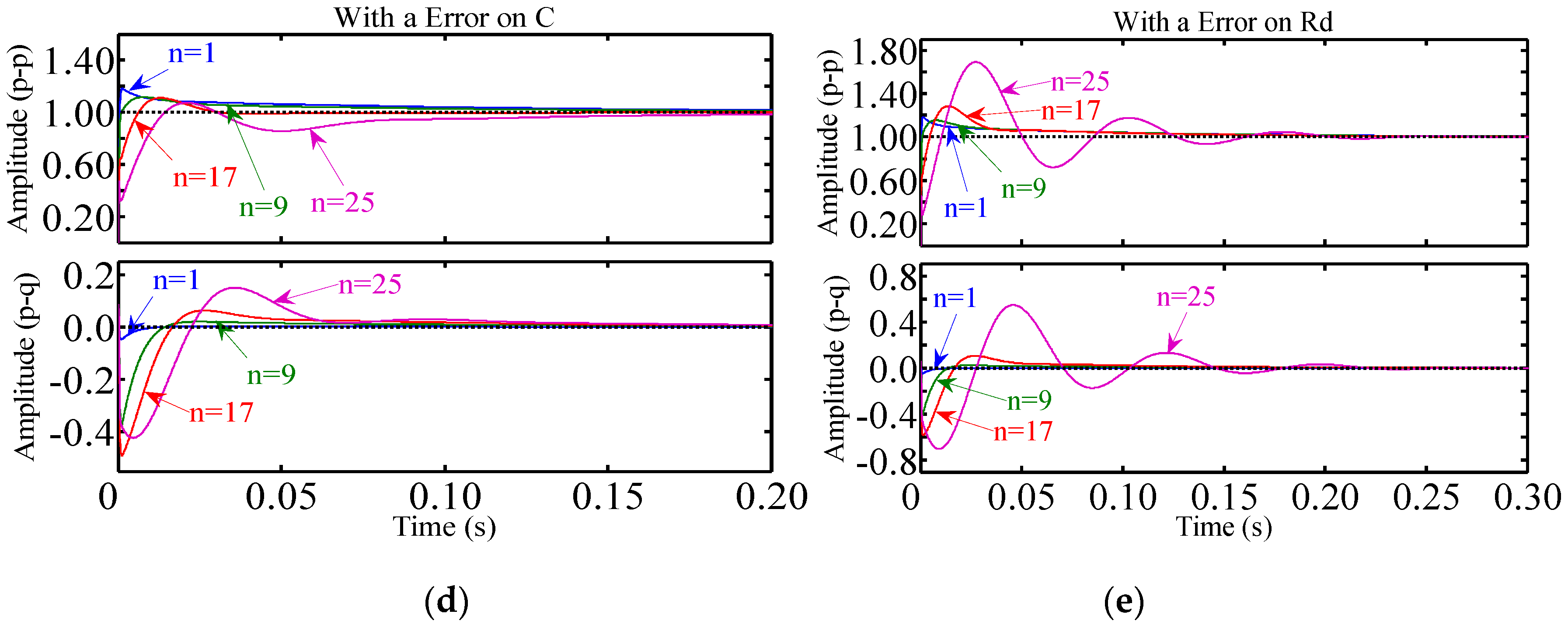
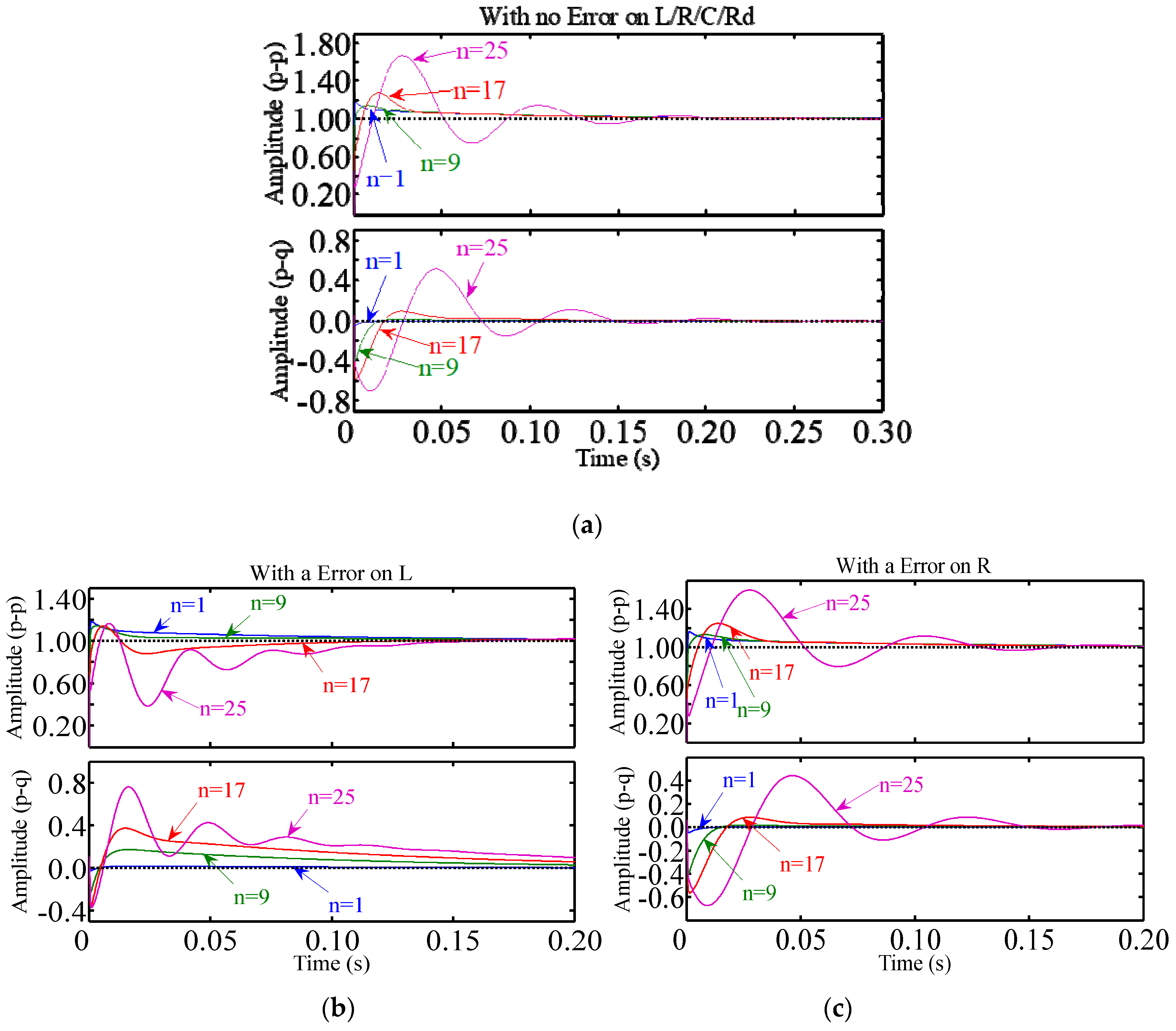
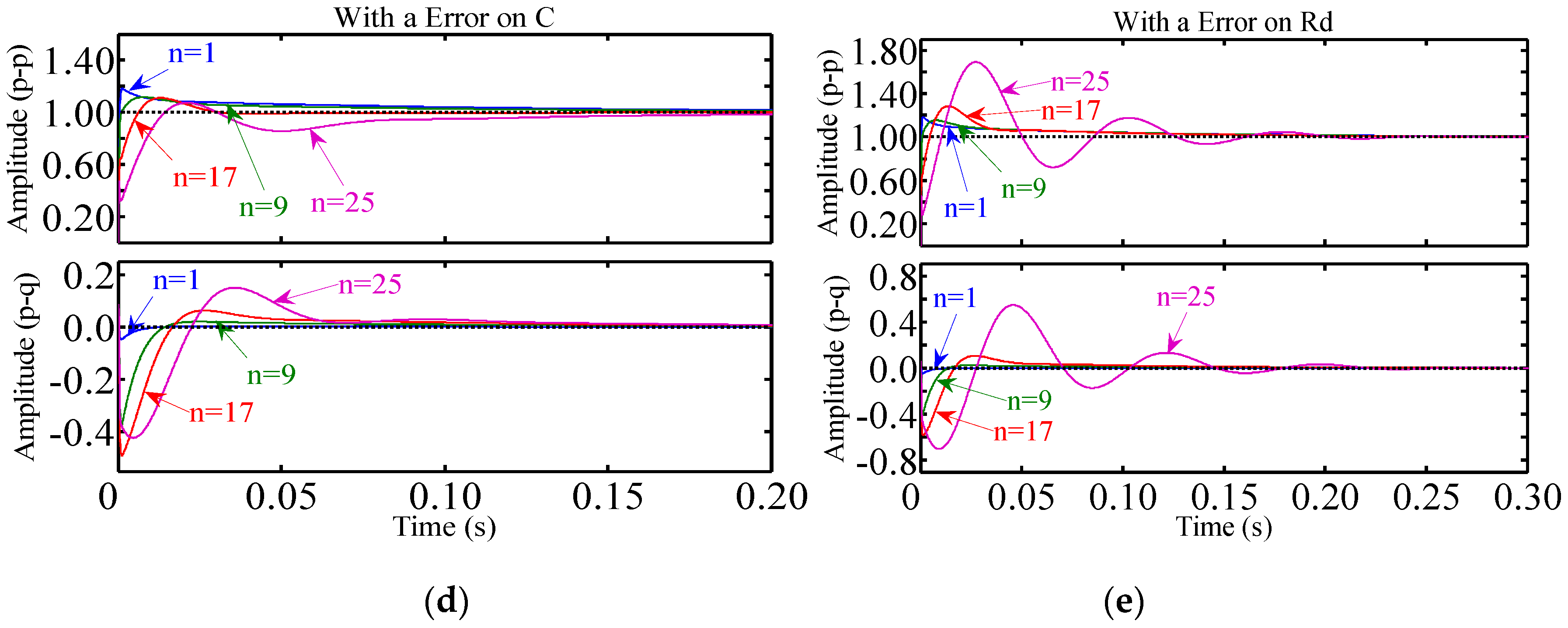
3.3. Performance Analysis for the Propsoed PBC Controller
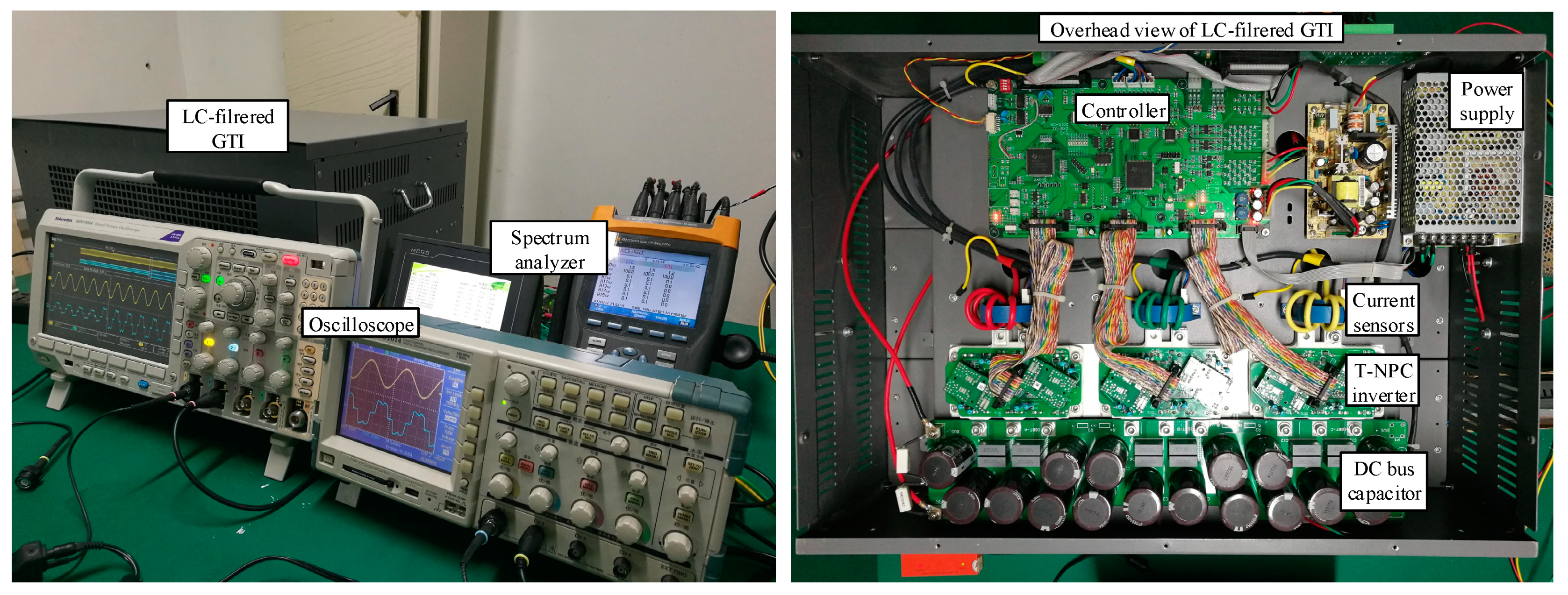
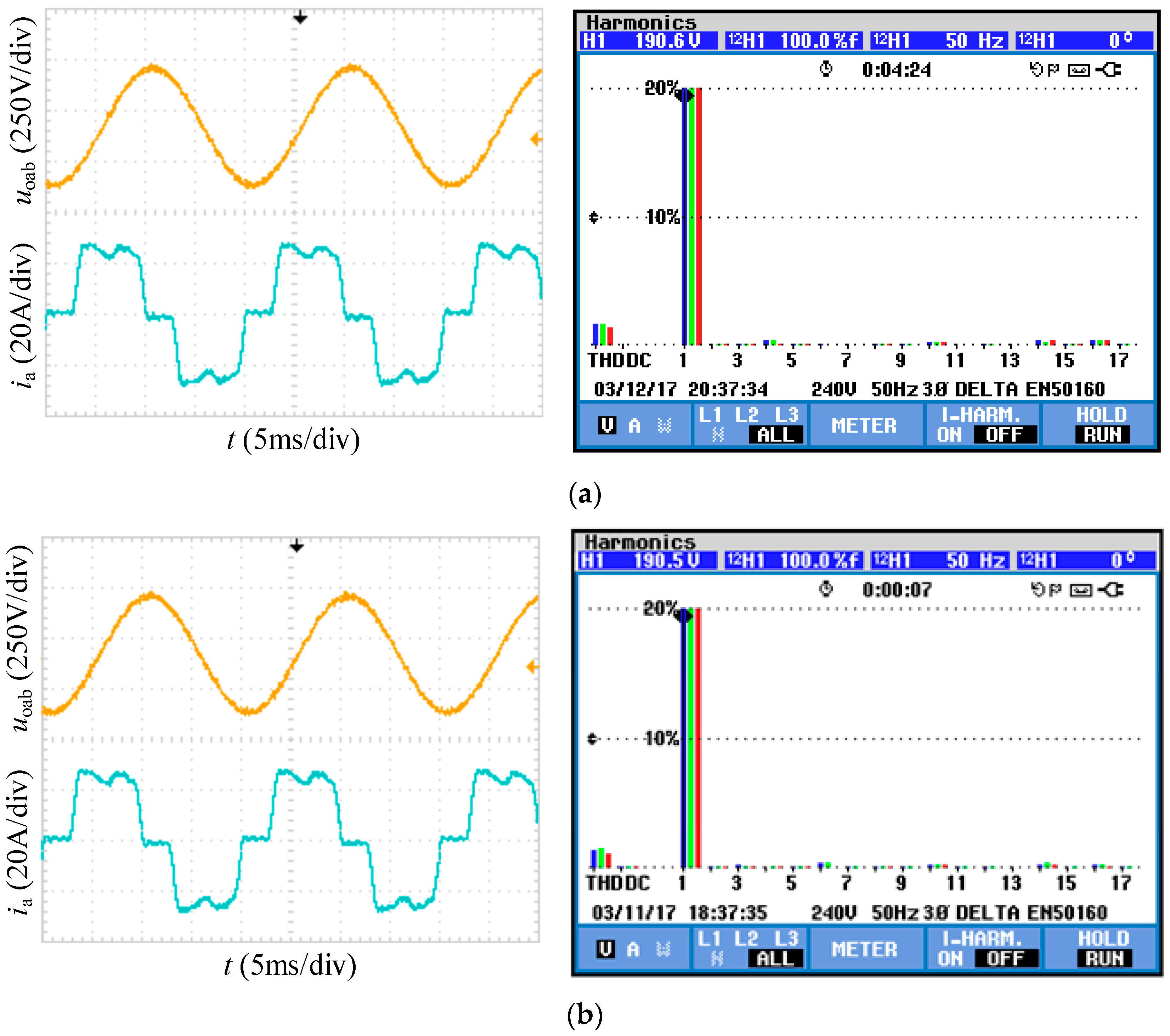
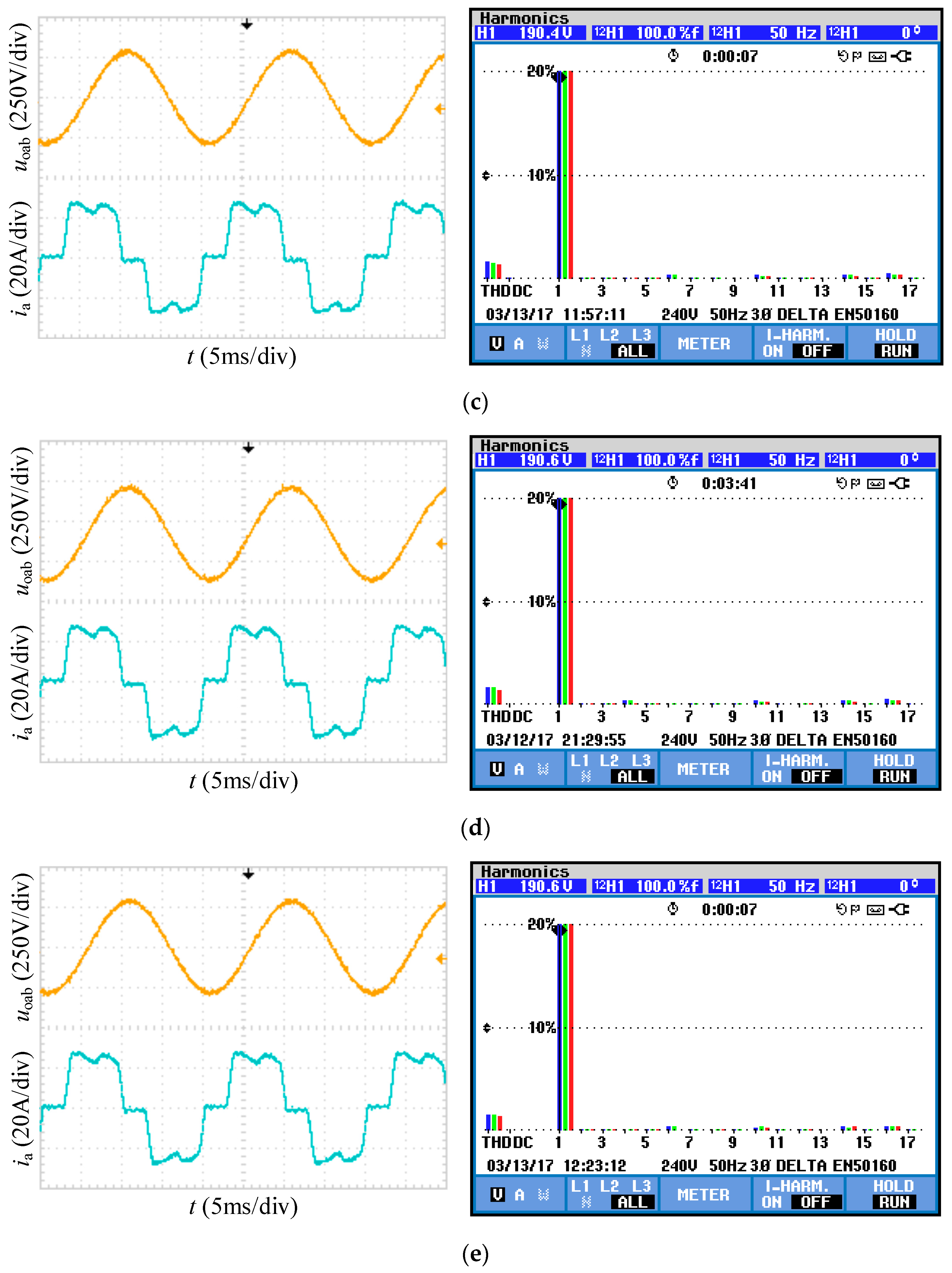
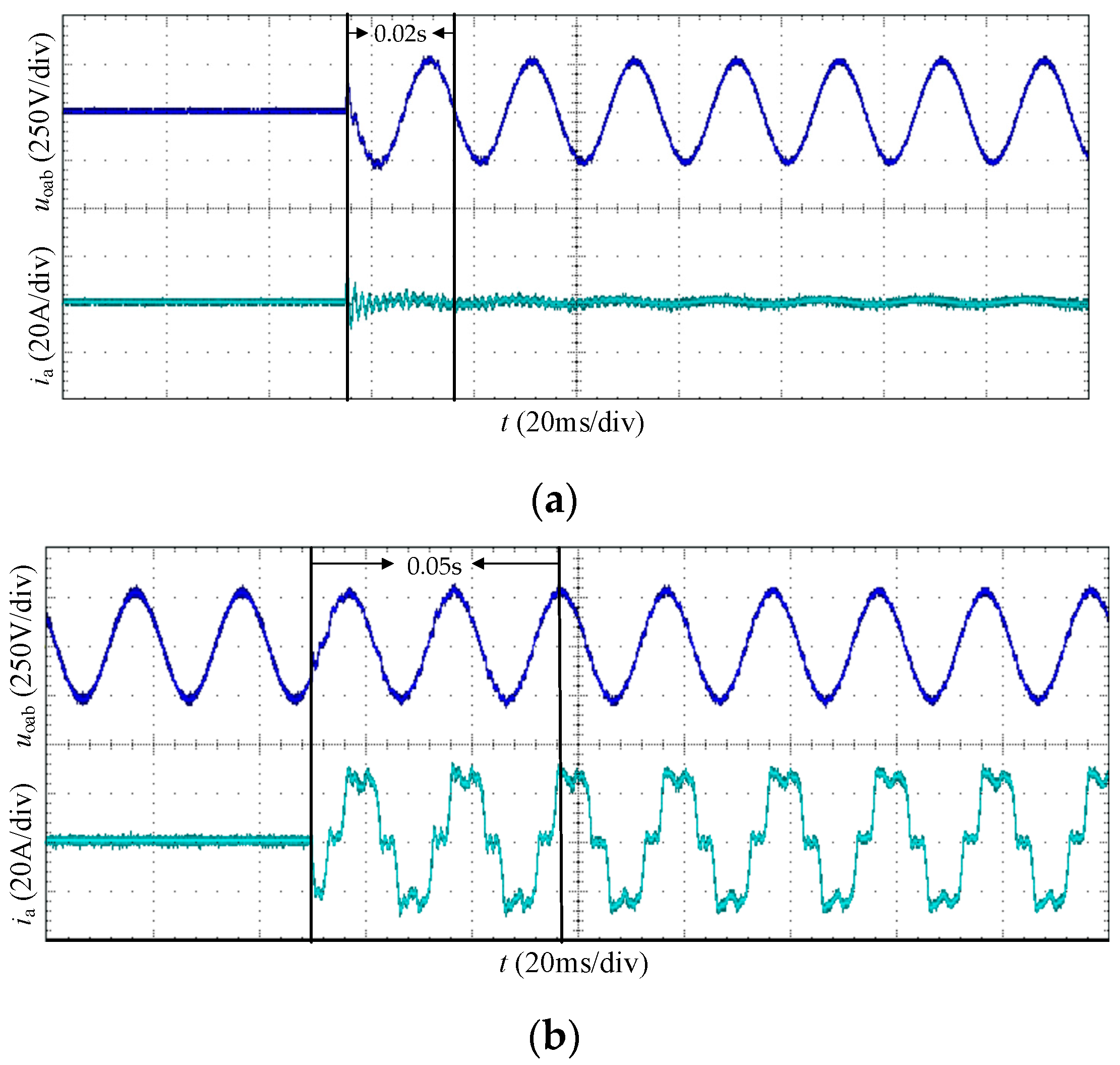
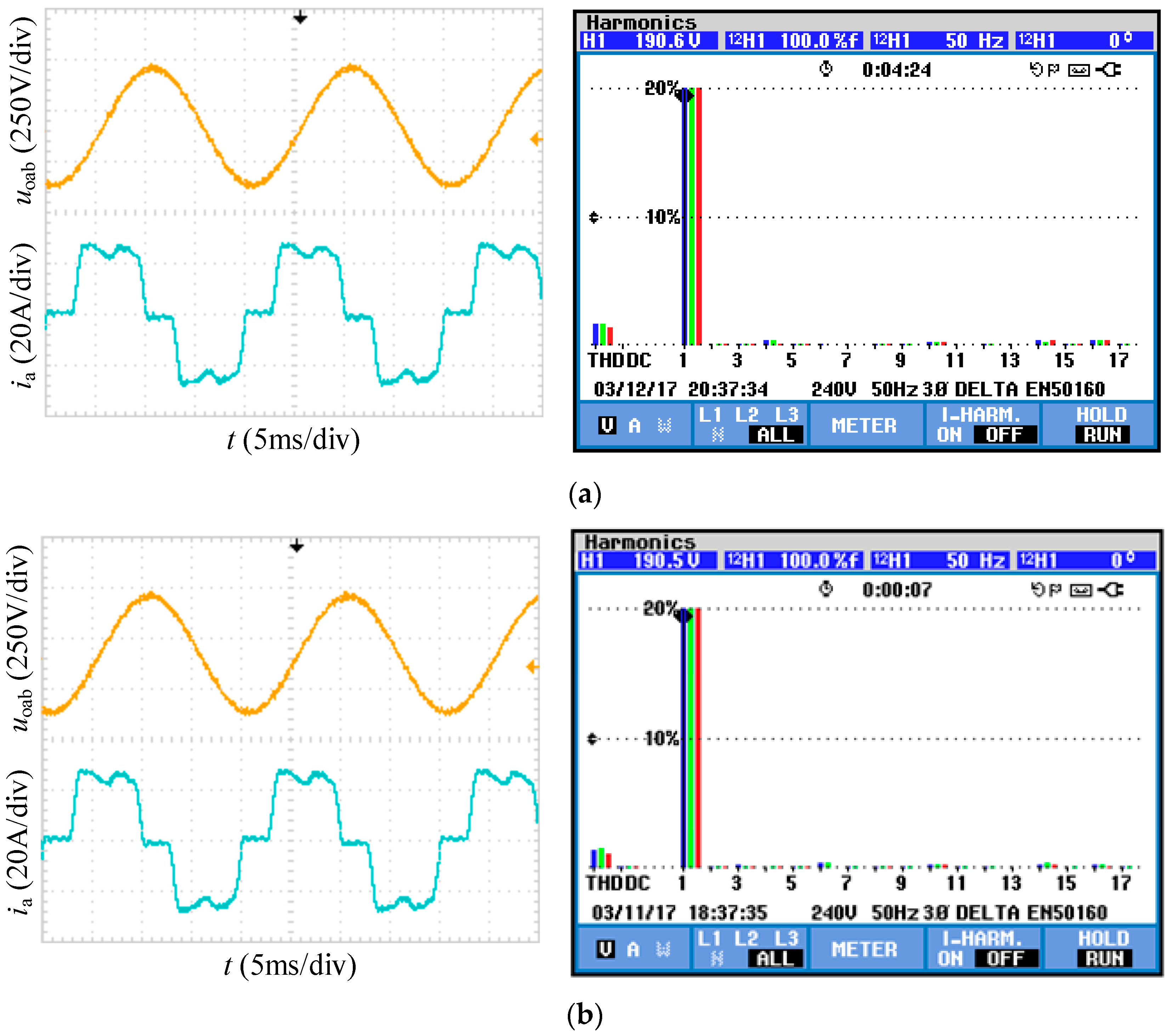
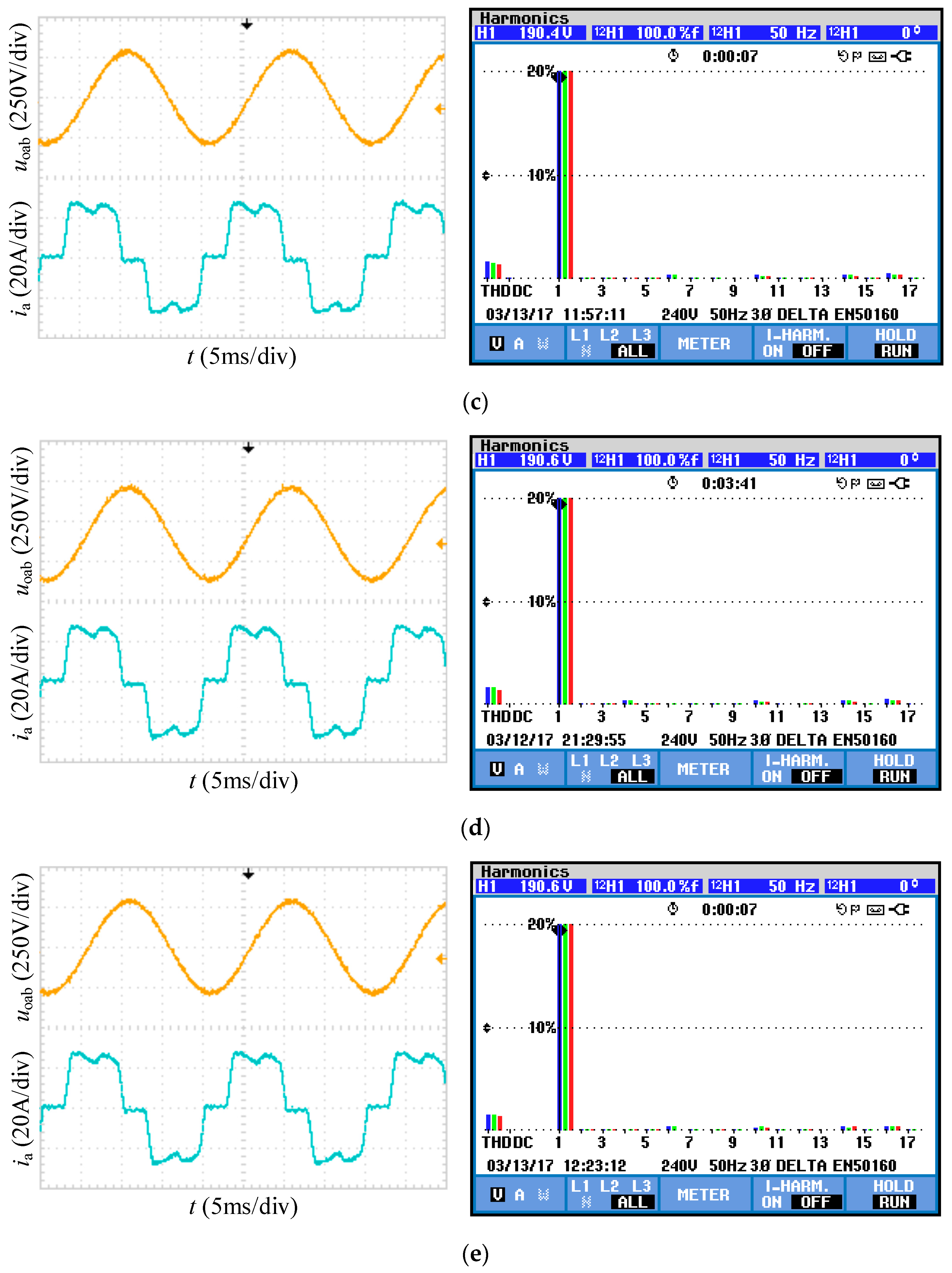
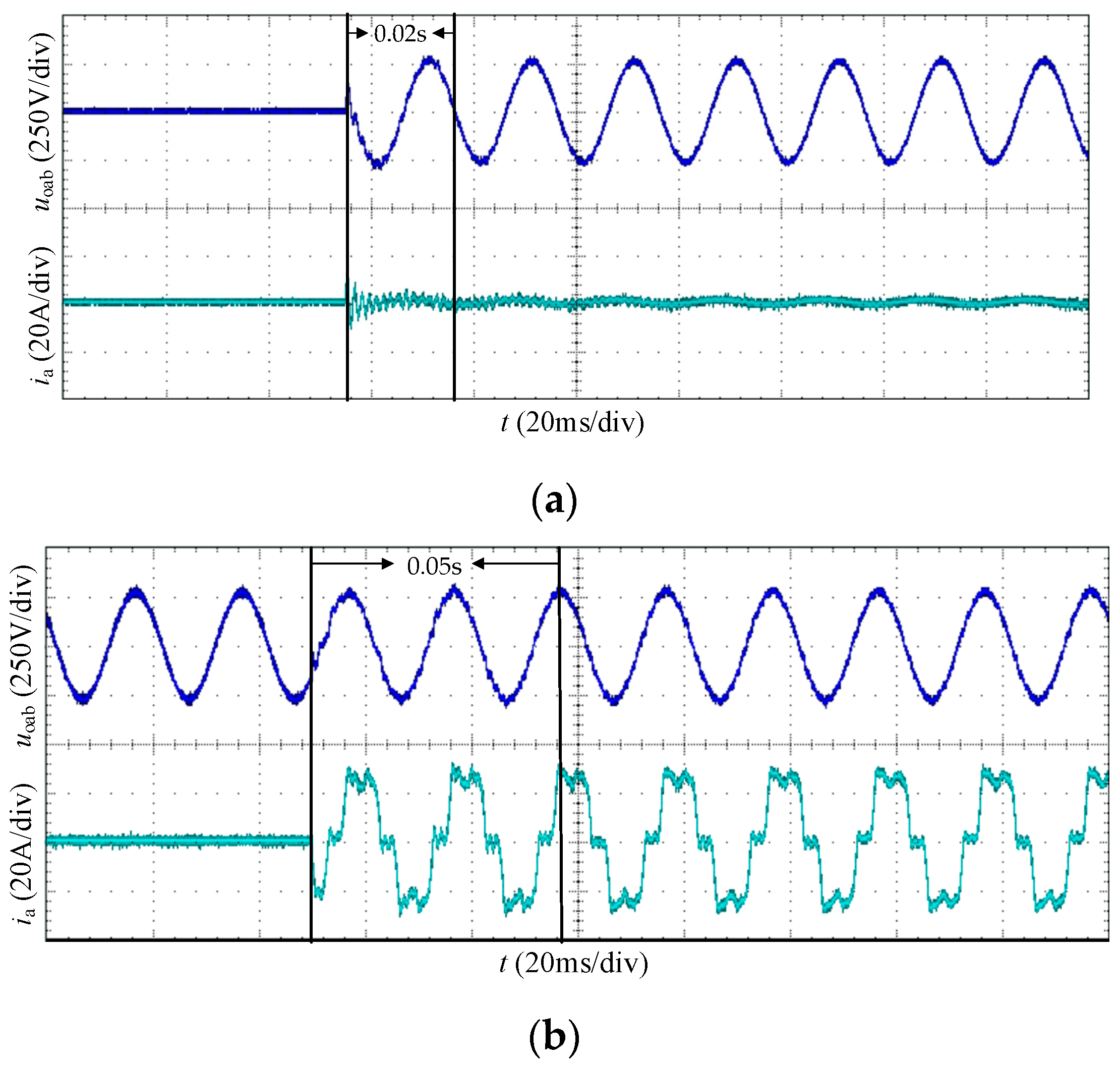
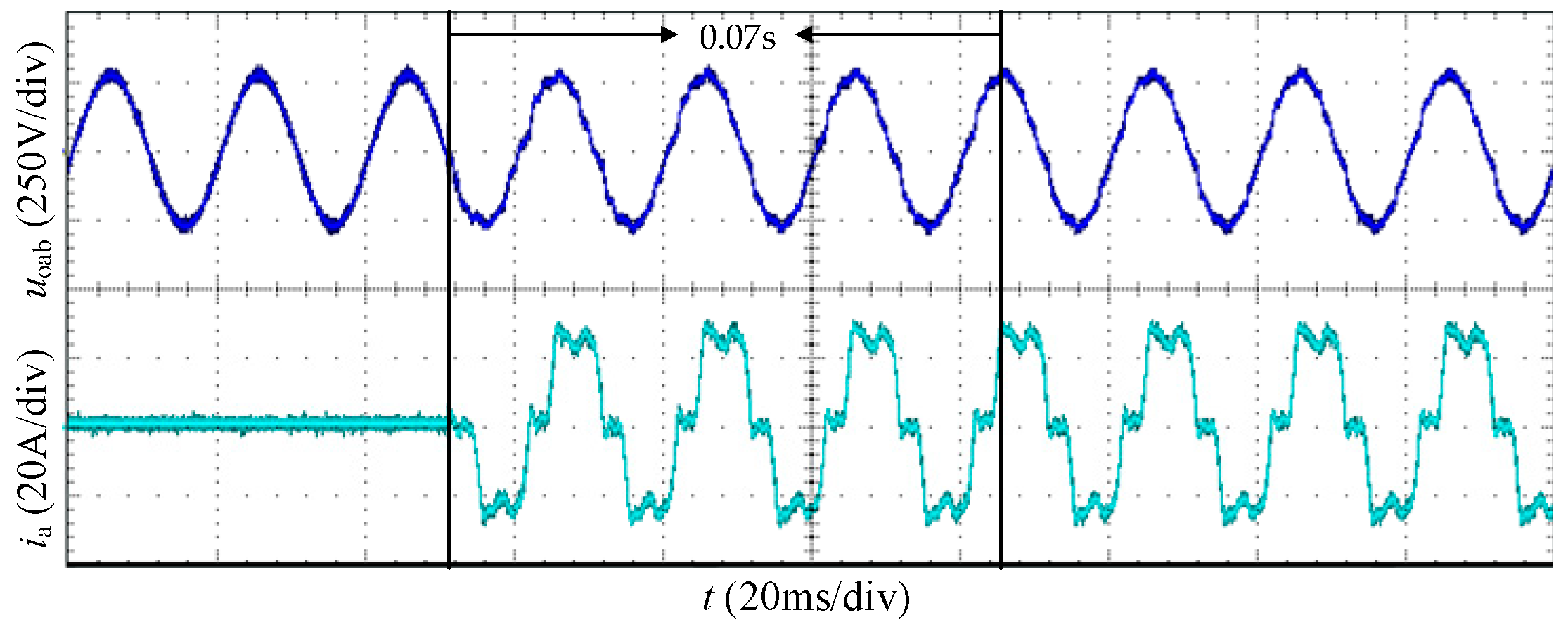
4. Experimental Verification
5. Conclusions
- (1)
- Less control variables, less hardware and software resources are occupied, thereby the calculation time can be saved a lot.
- (2)
- Zero steady-state error can be obtained by using the dynamic dissipation term, while a satisfactory dynamic performance can be gotten under both no-load and on-load conditions.
Author Contributions
Funding
Conflicts of Interest
References
- Wu, W.; He, Y.; Blaabjerg, F. An LLCL Power Filter for Single-Phase Grid-Tied Inverter. IEEE Trans. Power Electron. 2012, 27, 782–789. [Google Scholar] [CrossRef]
- Aamir, M.; Mekhilef, S. An Online Transformerless Uninterruptible Power Supply (UPS) System with a Smaller Battery Bank for Low-Power Applications. IEEE Trans. Power Electron. 2017, 32, 233–247. [Google Scholar] [CrossRef]
- Pichan, M.; Rastegar, H. Sliding-Mode Control of Four-Leg Inverter with Fixed Switching Frequency for Uninterruptible Power. IEEE Trans. Ind. Electron. 2017, 64, 6805–6814. [Google Scholar] [CrossRef]
- Tamyurek, B. A High-Performance SPWM Controller for Three-Phase UPS Systems Operating Under Highly Nonlinear Loads. IEEE Trans. Power Electron. 2013, 28, 3689–3701. [Google Scholar] [CrossRef]
- Michal, V. Three-Level PWM Floating H-Bridge Sinewave Power Inverter for High-Voltage and High-Efficiency Applications. IEEE Trans. Power Electron. 2016, 31, 4065–4074. [Google Scholar] [CrossRef]
- Zheng, L.; Jiang, F.; Song, J.; Gao, Y.; Tian, M. A Discrete Time Repetitive Sliding Mode Control for Voltage Source Inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1553–1566. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, W.; Shuai, Z.; Wang, X.; Luo, A.; Chung, H.S.H.; Blaabjerg, F. Principle and Robust Impedance-Based Design of Grid-tied Inverter with LLCL-Filter under Wide Variation of Grid-Reactance. IEEE Trans. Power Electron. 2019, 34, 4362–4374. [Google Scholar] [CrossRef]
- Zou, Z.; Zhou, K.; Wang, Z.; Cheng, M. Fractional-order repetitive control of programmable ac power sources. IET Power Electron. 2014, 7, 431–438. [Google Scholar] [CrossRef]
- Liu, T.; Wang, D.; Zhou, K. High-Performance Grid Simulator Using Parallel Structure Fractional Repetitive Control Parallel. IEEE Trans. Power Electron. 2016, 31, 2669–2679. [Google Scholar] [CrossRef]
- Wang, D.; Tian, J.; Mao, C.; Lu, J.; Duan, Y.; Qiu, J.; Cai, H. A 10kV_400V_500kVA Electronic Power Transformer. IEEE Trans. Ind. Electron. 2016, 63, 6653–6663. [Google Scholar] [CrossRef]
- She, X.; Huang, A.Q.; Burgos, R. Review of solid-state transformer technologies and their application in power distribution systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 186–198. [Google Scholar] [CrossRef]
- Pichan, M.; Rastegar, H.; Monfared, M. Deadbeat Control of the Stand-Alone Four-Leg Inverter Considering the Effect of the Neutral Line Inductor. IEEE Trans. Ind. Electron. 2017, 64, 2592–2601. [Google Scholar] [CrossRef]
- Lidozzi, A.; Ji, C.; Solero, L.; Zanchetta, P.; Crescimbini, F. Digital Deadbeat and Repetitive Combined Control for a Stand-Alone Four-Leg VSI. IEEE Trans. Ind. Appl. 2017, 53, 5624–5633. [Google Scholar] [CrossRef]
- Liu, T.; Wang, D. Parallel Structure Fractional Repetitive Control for PWM Inverters. IEEE Trans. Ind. Electron. 2015, 62, 5045–5054. [Google Scholar] [CrossRef]
- Lidozzi, A.; Solero, L.; Bifaretti, S.; Crescimbini, F. Sinusoidal voltage shaping of inverter-equipped stand-alone generating units. IEEE Trans. Ind. Electron. 2015, 62, 3557–3568. [Google Scholar] [CrossRef]
- Wu, W.; Liu, Y.; He, Y.; Chung, H.S.H.; Liserre, M.; Blaabjerg, F. Damping methods for resonances caused by LCL-filter-based current-controlled grid-tied power inverters: An Overview. IEEE Trans. Ind. Electron. 2017, 64, 7402–7413. [Google Scholar] [CrossRef]
- Lidozzi, A.; Di Benedetto, M.; Bifaretti, S.; Solero, L.; Crescimbini, F. Resonant controllers with three degrees of freedom for AC power electronic converters. IEEE Trans. Ind. Appl. 2015, 51, 4595–4604. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, W.; He, Y.; Lin, Z.; Blaabjerg, F.; Chung, H.S.H. An efficient and robust hybrid damper for LCL- or LLCL-based grid-tied inverter with strong grid-side harmonic voltage effect rejection. IEEE Trans. Ind. Electron. 2016, 63, 926–936. [Google Scholar] [CrossRef]
- Sebaaly, F.; Vahedi, H.; Kanaan, H.Y.; Moubayed, N.; Al-Haddad, K. Sliding Mode Fixed Frequency Current Controller Design for Grid-Connected NPC Inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1397–1405. [Google Scholar] [CrossRef]
- Gudey, S.K.; Gupta, R. Reduced state feedback sliding-mode current control for voltage source inverter-based higher-order circuit. IET Power Electron. 2015, 8, 1367–1376. [Google Scholar] [CrossRef]
- Wang, L.; Lam, C.S.; Wong, M.C.; Dai, N.Y.; Lao, K.W.; Wong, C.K. Non-linear adaptive hysteresis band pulse-width modulation control for hybrid active power filters to reduce switching loss. IET Power Electron. 2015, 8, 2156–2167. [Google Scholar] [CrossRef]
- Yaramasu, V.; Rivera, M.; Narimani, M.; Wu, B.; Rodriguez, J. Model Predictive Approach for a Simple and Effective Load Voltage Control of Four-Leg Inverter with an Output LC Filter. IEEE Trans. Ind. Electron. 2014, 61, 5259–5270. [Google Scholar] [CrossRef]
- Rohten, J.A.; Espinoza, J.R.; Muñoz, J.A.; Pérez, M.A.; Melin, P.E.; Silva, J.J.; Rivera, M.E. Model Predictive Control for Power Converters in a Distorted Three-Phase Power Supply. IEEE Trans. Ind. Electron. 2016, 63, 5838–5848. [Google Scholar] [CrossRef]
- Do, T.D.; Leu, V.Q.; Choi, Y.S.; Choi, H.H.; Jung, J.W. An adaptive voltage control strategy of three-phase inverter for stand-alone distributed generation systems. IEEE Trans. Ind. Electron. 2013, 60, 5660–5672. [Google Scholar] [CrossRef]
- Kim, E.K.; Mwasilu, F.; Choi, H.H.; Jung, J.W. An Observer-Based Optimal Voltage Control Scheme for Three-Phase UPS Systems. IEEE Trans. Ind. Electron. 2015, 62, 2073–2081. [Google Scholar] [CrossRef]
- Komurcugil, H. Improved passivity-based control method and its robustness analysis for single-phase uninterruptible power supply inverters. IET Power Electron. 2015, 8, 1558–1570. [Google Scholar] [CrossRef]
- Ortega, R.; Perez, J.A.L.; Nicklasson, P.J.; Sira-Ramirez, H.J. Passivity-Based Control of Euler-Lagrange Systems: Mechanical Electrical and Electromechanical Application; Springer: London, UK, 1998. [Google Scholar]
- Lee, T.S. Lagrangian modeling and passivity-based control of three phase AC/DC voltage-source converters. IEEE Trans. Ind. Electron. 2004, 51, 892–902. [Google Scholar] [CrossRef]
- Mehrasa, M.; Adabi, M.E.; Pouresmaeil, E.; Adabi, J. Passivity-based control technique for integration of DG resources into the power grid. Int. J. Electr. Power Energy Syst. 2014, 58, 281–290. [Google Scholar] [CrossRef]
- Yang, B.; Jiang, L.; Yu, T.; Shu, H.C.; Zhang, C.K.; Yao, W.; Wu, Q.H. Passive control design for multi-terminal VSC-HVDC systems via energy shaping. Int. J. Electr. Power Energy Syst. 2018, 98, 496–508. [Google Scholar] [CrossRef]
- Xu, R.; Yu, Y.; Yang, R.; Wang, G.; Xu, D.; Li, B.; Sui, S. A Novel Control Method for Transformerless H-Bridge Cascaded STATCOM with Star Configuration. IEEE Trans. Power Electron. 2015, 30, 1189–1202. [Google Scholar] [CrossRef]
- Chen, Y.; Wen, M.; Lei, E.; Yin, X.; Lai, J.; Wang, Z. Passivity-based control of cascaded multilevel converter based D-STATCOM integrated with distribution transformer. Electr. Power Syst. Res. 2018, 154, 1–12. [Google Scholar] [CrossRef]
- Del Puerto-Flores, D.; Scherpen, J.M.; Liserre, M.; de Vries, M.M.; Kransse, M.J.; Monopoli, V.G. Passivity-based control by series/parallel damping of single-phase PWM voltage source converter. IEEE Trans. Control Syst. Technol. 2014, 22, 1310–1322. [Google Scholar] [CrossRef] [Green Version]
- Gui, Y.; Kim, W.; Chung, C.C. Passivity-based control with nonlinear damping for type 2 STATCOM systems. IEEE Trans. Power Syst. 2016, 31, 2824–2833. [Google Scholar] [CrossRef]
- Serra, F.M.; Angelo, C.H.D.; Forchetti, D.G. Interconnection and damping assignment control of a three-phase front end converter. Int. J. Electr. Power Energy Syst. 2014, 60, 317–324. [Google Scholar] [CrossRef]
- Fan, X.; Guan, L.; Xia, C.; Ji, T. IDA-PB control design for VSC-HVDC transmission based on PCHD model. Int. Trans. Electr. Energy Syst. 2015, 25, 2133–2143. [Google Scholar] [CrossRef]
- Tiantian, Q.; Shihong, M.; Ziwen, L. Passive Control and Auxiliary Sliding Mode Control Strategy for VSC-HVDC System Based on PCHD Model. Trans. China Electrotech. Soc. 2016, 31, 138–144. [Google Scholar]
- Mu, X.; Wang, J.; Wu, W.; Blaabjerg, F. A Modified Multifrequency Passivity-Based Control for Shunt Active Power Filter with Model-Parameter-Adaptive Capability. IEEE Trans. Ind. Electron. 2018, 65, 760–769. [Google Scholar] [CrossRef]
- Wang, J.; Mu, X.; Li, Q. Study of Passivity-Based Decoupling Control of T-NPC PV Grid-Connected Inverter. IEEE Trans. Ind. Electron. 2017, 64, 7542–7551. [Google Scholar] [CrossRef]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous reactive power compensators comprising switching devices without energy storage components. IEEE Trans. Ind. Appl. 1984, IA-20, 625–630. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| R | 0.1 Ω | LE | 0.9 mH | Ω | 100 πrad/s |
| L | 0.9 mH | RdE | 200 Ω | rd | 0.2 |
| Rd | 200 Ω | CE | 10.0 uF | Ti | 0.02 s |
| C | 10.0 uF | Tω | 0.02 s | ||
| RE | 0.1 Ω | Ts | 100 us |
| Procedural Content | Execution Time |
|---|---|
| Sampling period | 133.33 us |
| Control algorithm at every selected frequency | 16 us |
| ADC | 8 us |
| Protection and communication | 8 us |
| Group | THD | uoab1 | 5th | 7th | 11th | 13th | 17th | 19th |
|---|---|---|---|---|---|---|---|---|
| Ref. | \ | 190.5 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 1-MPBC | 1.6 | 190.6 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| 2-MPBC | 1.5 | 190.5 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| 3-MPBC | 1.6 | 190.4 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| 4-MPBC | 1.6 | 190.6 | 0.1 | 0.1 | 0.1 | 0.1 | 0.2 | 0.2 |
| 5-MPBC | 1.6 | 190.6 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, X.; Chen, G.; Wang, X.; Zhao, J.; Wu, W.; Blaabjerg, F. Multi-Frequency Single Loop Passivity-Based Control for LC-Filtered Stand-Alone Voltage Source Inverter. Energies 2019, 12, 4548. https://doi.org/10.3390/en12234548
Mu X, Chen G, Wang X, Zhao J, Wu W, Blaabjerg F. Multi-Frequency Single Loop Passivity-Based Control for LC-Filtered Stand-Alone Voltage Source Inverter. Energies. 2019; 12(23):4548. https://doi.org/10.3390/en12234548
Chicago/Turabian StyleMu, Xiaobin, Guofu Chen, Xiang Wang, Jinping Zhao, Weimin Wu, and Frede Blaabjerg. 2019. "Multi-Frequency Single Loop Passivity-Based Control for LC-Filtered Stand-Alone Voltage Source Inverter" Energies 12, no. 23: 4548. https://doi.org/10.3390/en12234548
APA StyleMu, X., Chen, G., Wang, X., Zhao, J., Wu, W., & Blaabjerg, F. (2019). Multi-Frequency Single Loop Passivity-Based Control for LC-Filtered Stand-Alone Voltage Source Inverter. Energies, 12(23), 4548. https://doi.org/10.3390/en12234548