A Mixed-Integer Convex Programming Algorithm for Security-Constrained Unit Commitment of Power System with 110-kV Network and Pumped-Storage Hydro Units


Abstract
:
1. Introduction
2. QAPF Model
3. SCUC Model of Power System Including 110 kV Network and PSH Units
3.1. Objective Function
3.2. Constraints
4. Convex Relaxation of the SCUC Model
4.1. Convex Hull Relaxation of the QAPF Model
4.2. MICP Model for SCUC
5. Cases and Results
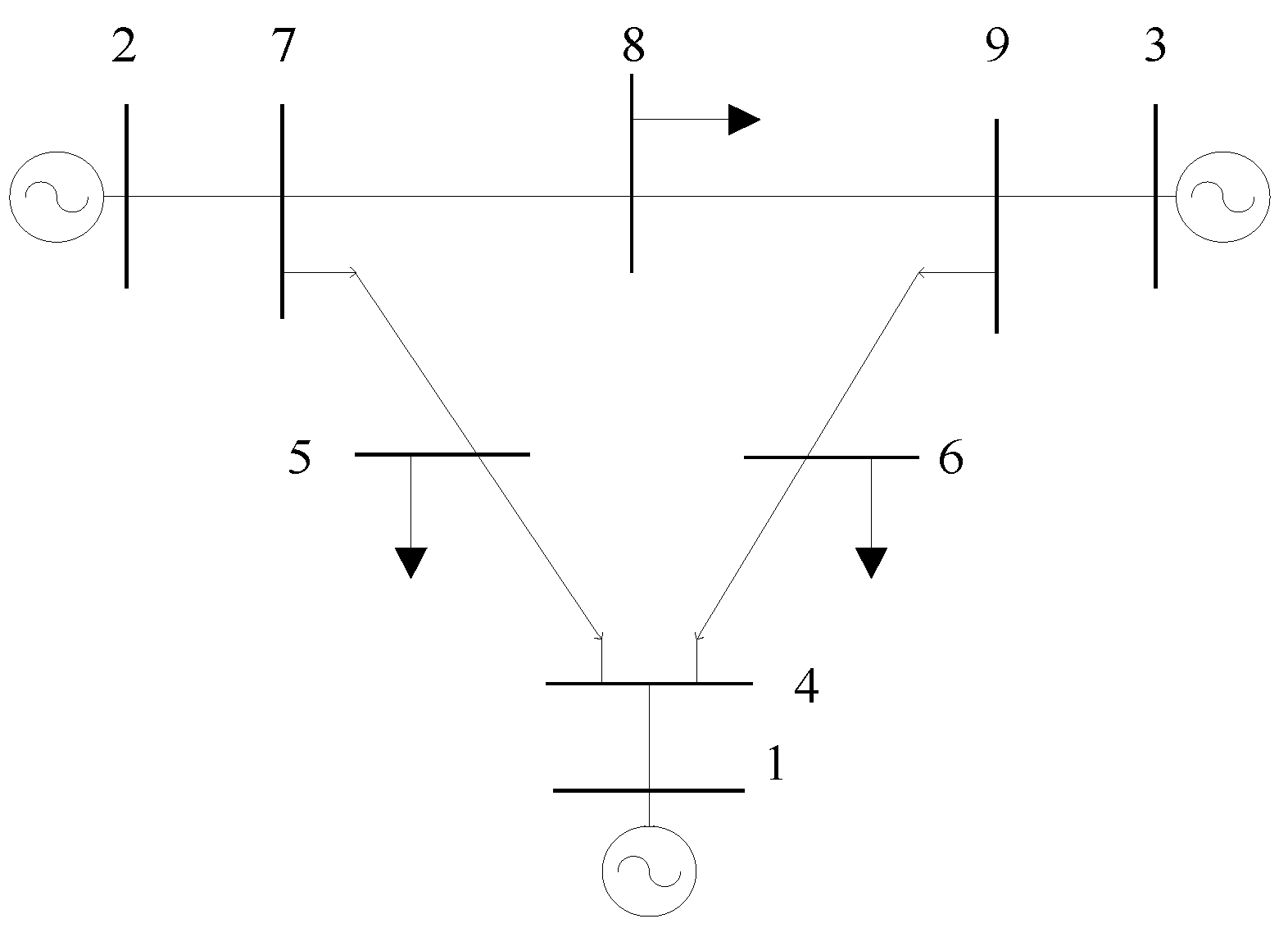
5.1. IEEE-9 Bus System
5.1.1. Precision Analysis of QAPF Model in Computing the Active Power of Lines
5.1.2. Precision Analysis of SCUC Models with Different PF Models
5.2. PEGASE 89 Buses System
5.2.1. Precision analysis of QAPF model in computing the active power of lines
5.2.2. Precision analysis of SCUC models with different PF models
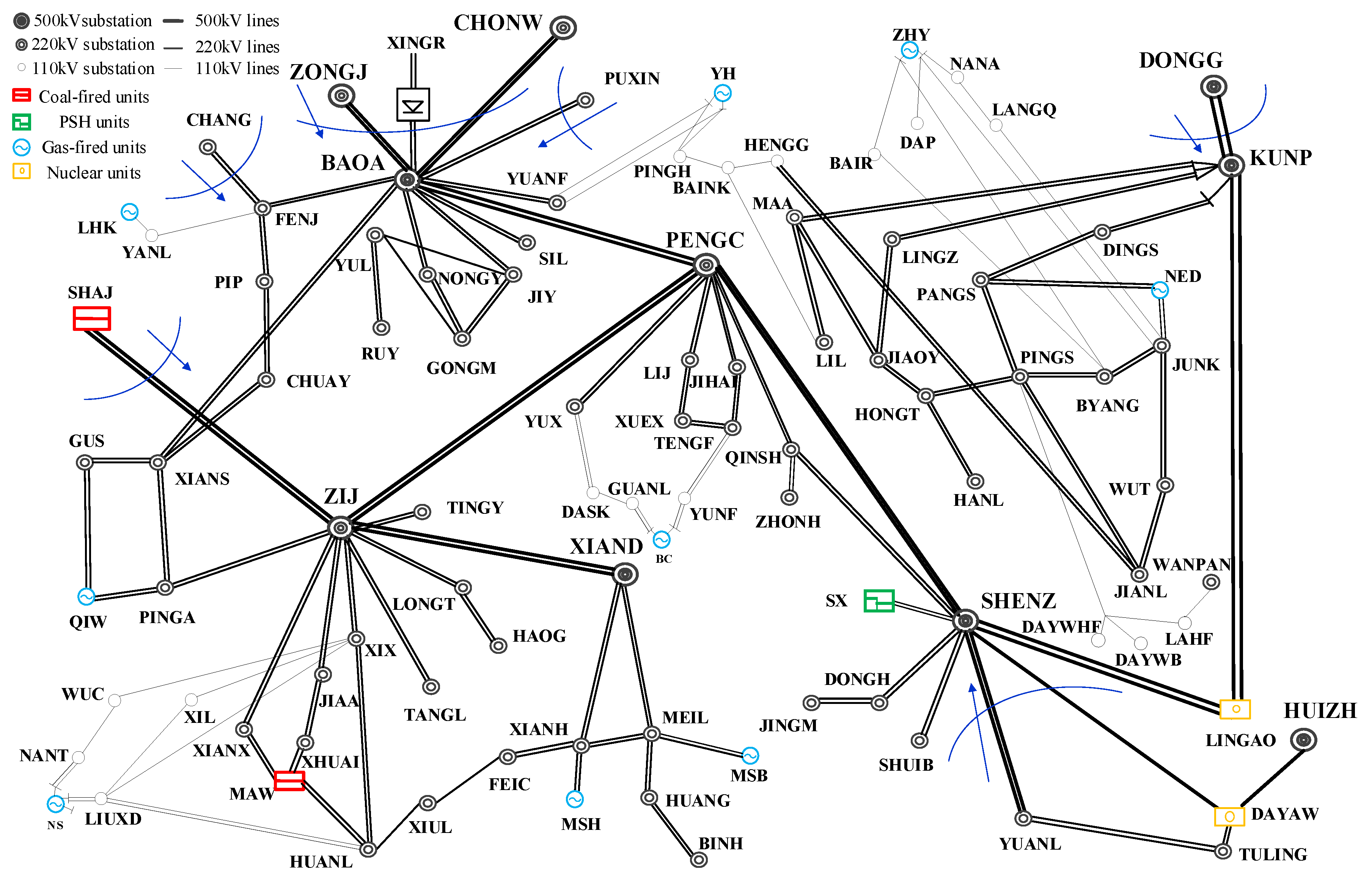
5.3. Shenzhen City Power Grid Including 110 kV Network
5.3.1. Precision Analysis of QAPF Model in Computing the Active Power of Lines
5.3.2. Precision Analysis of SCUC Models with Different PF Models
6. Conclusions
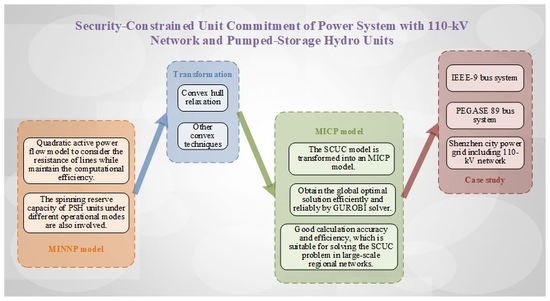
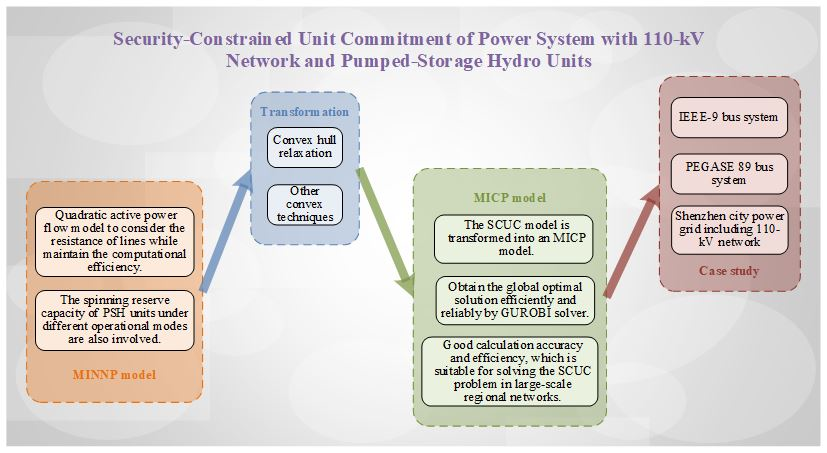
- For a power system including a 110-kV network, the DCPF model cannot compute the active power of lines accurately, and the proposed QAPF model considering the resistance of lines can improve the calculation accuracy effectively;
- The convex hull relaxation can be applied to transform the SCUC problem with QAPF constraints from an MINNP model into an MICP model, which has faster computation efficiency and higher accuracy in solving the SCUC problem of large-scale regional power grids;
- By considering the SR capacity of PSH units in the SCUC model, the SR capacity required by thermal units can be reduced, which enables the thermal units to operate at a state in which the fuel costs are more economic and the total operation cost of the system can be decreased.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ruzic, S.; Rajakovic, N. A new approach for solving extended unit commitment problem. IEEE Trans. Power Syst. 1991, 6, 269–277. [Google Scholar] [CrossRef]
- Khodaei, A.; Shahidehpour, M. Transmission switching in security-constrained unit commitment. IEEE Trans. Power Syst. 2010, 25, 1937–1945. [Google Scholar] [CrossRef]
- Fu, Y.; Shahidehpour, M. Fast SCUC for large-scale power systems. IEEE Trans. Power Syst. 2007, 22, 2144–2151. [Google Scholar] [CrossRef]
- Ahmadi, H.; Ghasemi, H. Security-constrained unit commitment with linearized system frequency limit constraints. IEEE Trans. Power Syst. 2014, 29, 1536–1545. [Google Scholar] [CrossRef]
- Gutierrez-Alcaraz, G.; Hinojosa, V.H. Using generalized generation distribution factors in a MILP model to solve the transmission-constrained unit commitment problem. Energies 2018, 30, 2232. [Google Scholar] [CrossRef]
- Bai, Y.; Zhong, H.W.; Xia, Q.; Kang, C.Q.; Xie, L. A decomposition method for network-constrained unit commitment with AC power flow constraints. Energy 2015, 88, 595–603. [Google Scholar] [CrossRef]
- Castillo, A.; Laird, C.; Silva-Monroy, C.A.; Watson, J.P.; O’Neill, R.P. The unit commitment problem with AC optimal power flow constraints. IEEE Trans. Power Syst. 2016, 31, 4853–4866. [Google Scholar] [CrossRef]
- Wang, C.; Fu, Y. Fully parallel stochastic security-constrained unit commitment. IEEE Trans. Power Syst. 2016, 31, 3561–3571. [Google Scholar] [CrossRef]
- Liu, J.; Laird, C.D.; Scott, J.K.; Watson, J.; Castillo, A. Global solution strategies for the network-constrained unit commitment problem with AC transmission constraints. IEEE Trans. Power Syst. 2019, 34, 1139–1150. [Google Scholar] [CrossRef]
- Yuan, H.Y.; Li, F.X.; Wei, Y.L.; Zhu, J.X. Novel linearized power flow and linearized OPF models for active distribution networks with application in distribution LMP. IEEE Trans. Smart Grid 2018, 9, 438–448. [Google Scholar] [CrossRef]
- Nasri, A.; Kazempour, S.J.; Conejo, A.J.; Ghandhari, M. Network-constrained AC unit commitment under uncertainty: A Benders’ decomposition approach. IEEE Trans. Power Syst. 2016, 31, 412–422. [Google Scholar] [CrossRef]
- Amjady, N.; Dehghan, S.; Attarha, A.; Conejo, A.J. Adaptive robust network-constrained AC unit commitment. IEEE Trans. Power Syst. 2017, 32, 672–683. [Google Scholar] [CrossRef]
- Aghaei, J.; Nikoobakht, A.; Siano, P.; Nayeripour, M.; Heidari, A.; Mardaneh, M. Exploring the reliability effects on the short term AC security-constrained unit commitment: A stochastic evaluation. Energy 2016, 114, 1016–1032. [Google Scholar] [CrossRef]
- Nikoobakhtm, A.; Mardaneh, M.; Aghaei, J.; Guerrero-Mestre, V.; Contreras, J. Flexible power system operation accommodating uncertain wind power generation using transmission topology control: An improved linearised AC SCUC model. IET Gener. Transm. Distrib. 2017, 11, 142–153. [Google Scholar] [CrossRef]
- Khodayar, M.E.; Shahidehpour, M.; Wu, L. Enhancing the dispatchability of variable wind generation by coordination with pumped-storage hydro units in stochastic power systems. IEEE Trans. Power Syst. 2013, 28, 2808–2818. [Google Scholar] [CrossRef]
- Khodayar, M.E.; Abreu, L.; Shahidehpour, M. Transmission-constrained intrahour coordination of wind and pumped-storage hydro units. IET Gener. Transm. Distrib. 2013, 7, 755–765. [Google Scholar] [CrossRef]
- Lin, S.J.; Liu, M.B.; Li, Q.F.; Lu, W.T.; Yan, Y.; Liu, C.P. Normalised normal constraint algorithm applied to multi-objective security-constrained optimal generation dispatch of large-scale power systems with wind farms and pumped-storage hydroelectric stations. IET Gener. Transm. Distrib. 2017, 11, 1539–1548. [Google Scholar] [CrossRef]
- Varkani, A.K.; Daraeepour, A.; Monsef, H. A new self-scheduling strategy for integrated operation of wind and pumped–storage power plants in power markets. Appl. Energy 2011, 88, 5002–5012. [Google Scholar] [CrossRef]
- Kumano, J.; Yokoyama, A. Optimal weekly operation scheduling on pumped storage hydro power plant and storage battery considering reserve margin with a large penetration of renewable energy. In Proceedings of the 2014 International Conference on Power System Technology, Chengdu, China, 20–22 October 2014; pp. 1120–1126. [Google Scholar]
- Xiong, P.; Jirutitijaroen, P. Stochastic unit commitment using multi–cut decomposition algorithm with partial aggregation. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]
- Zhao, C.Y.; Guan, Y.P. Unified stochastic and robust unit commitment. IEEE Trans. Power Syst. 2013, 28, 3353–3361. [Google Scholar] [CrossRef]
- Hedman, K.W.; Ferris, M.C.; O’Neill, R.P.; Fisher, E.B.; Oren, S.S. Co–optimization of generation unit commitment and transmission switching with N–1 reliability. IEEE Trans. Power Syst. 2010, 25, 1052–1063. [Google Scholar] [CrossRef]
- Jabr, R.A.; Singh, R.; Pal, B.C. Minimum loss network reconfiguration using mixed-integer convex programming. IEEE Trans. Power Syst. 2012, 27, 1106–1115. [Google Scholar] [CrossRef]
- Li, Q.F.; Yu, S.; Al–Sumaiti, A.; Turitsyn, K. Micro water–energy nexus: Optimal demandside management and quasi-convex hull relaxation. IEEE Trans. Control Netw. Syst. 2018. [Google Scholar] [CrossRef]
- Li, Q.F.; Vittal, V. The convex hull of the AC power flow equations in rectangular coordinates. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Li, Q.F.; Vittal, V. Convex Hull of the Quadratic Branch AC Power Flow Equations and Its Application in Radial Distribution Networks. IEEE Trans. Power Syst. 2018, 33, 839–850. [Google Scholar] [CrossRef]
- Available online: https://www.gams.com/latest/docs/UG_MAIN.html (accessed on 19 September 2019).
- Josz, C.; Fliscounakis, S.; Maeght, J.; Panciatici, P. AC power flow data in MATPOWER and QCQP format: iTesla, RTE snapshots, and PEGASE. arXiv 2016, arXiv:1603.01533. [Google Scholar]
- Fliscounakis, S.; Panciatici, P.; Capitanescu, F.; Wehenkel, L. Contingency ranking with respect to overloads in very large power systems taking into account uncertainty, preventive and corrective actions. IEEE Trans. Power Syst. 2013, 28, 4909–4917. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lines | Resistance/Ω | Reactance/Ω | Susceptance/10−4S | Ratio X/R | Pl,max/MW |
|---|---|---|---|---|---|
| Bus-8----Bus-7 | 10.1171 | 85.6980 | 1.2518 | 8.47 | 250 |
| Bus-8----Bus-9 | 14.1640 | 119.9772 | 1.7559 | 8.47 | 150 |
| Bus-5----Bus-7 | 38.0880 | 191.6303 | 2.5709 | 5.03 | 120 |
| Bus-6----Bus-9 | 46.4198 | 202.3425 | 3.0078 | 4.36 | 150 |
| Bus-4----Bus-5 | 11.9025 | 101.1723 | 1.4789 | 8.50 | 250 |
| Bus-4----Bus-6 | 20.2343 | 109.5030 | 1.3275 | 5.41 | 250 |
| Unit Type | Bus | Upper/Lower Limits (MW) | Ramping Up/Down Limits (MW/min) | Fuel-Cost Coefficients Of Thermal Units | Minimum On/Off Periods | Start-Up/Shut-Down Cost (103 ¥) | ||
|---|---|---|---|---|---|---|---|---|
| Ai,2 (¥/MW2h)) | Ai,1 (¥/(MWh)) | Ai,0 (¥/h) | ||||||
| Thermal | 2 | 150/50 | 1.2 | 0.027 | 270 | 2759.40 | 2/3 | 400/100 |
| 3 | 220/120 | 1.2 | 0.027 | 270 | 2759.40 | 3/4 | 500/100 | |
| PSH | 1 | 100/−100 | 20 | 0 | 0 | 0 | 1/1 | 80/40 |
| Lines | DCPF/p.u. | QAPF/p.u. | ACPF/p.u. | Relative Deviation of DCPF/% | Relative Deviation of QAPF/% |
|---|---|---|---|---|---|
| BUS-4----BUS-6 | 0.24387 | 0.18598 | 0.19482 | 25.18 | 4.54 |
| BUS-5----BUS-7 | 1.35613 | 1.29885 | 1.28953 | 5.16 | 0.72 |
| BUS-6----BUS-9 | 1.14387 | 1.08659 | 1.09589 | 4.38 | 0.85 |
| BUS-8----BUS-7 | 0.64387 | 0.63893 | 0.64777 | 0.60 | 1.36 |
| BUS-8----BUS-9 | 0.35613 | 0.36107 | 0.35223 | 1.11 | 2.51 |
| SCUC Model | Objective Value/103 ¥ | Start-Up/Shut-Down Cost/103 ¥ | Fuel Cost/103 ¥ | CPU Time/s |
|---|---|---|---|---|
| MILP | 8878.09 | 720 | 8158.09 | 2.3 |
| MINNP | 8391.25 | 240 | 8151.25 | 10.8 |
| MICP | 8392.38 | 240 | 8152.38 | 9.4 |
| Unit Type | Bus Number | Upper/Lower Limits (MW) | Ramping Up/Down Limits (MW/min) | Fuel-Cost Coefficients of Thermal Units Ai,1/(¥/(MWh)) | Minimum On/Off Periods | Start-Up/Shut-Down Cost (103 ¥) |
|---|---|---|---|---|---|---|
| PSH | 1 | 666/-666 | 66.7 | - | 1/1 | 12/5 |
| Gas-fired | 2 | 1500/500 | 8.3 | 6323 | 2/2 | 60/25 |
| 3 | 500/166.7 | 2.8 | 6000 | 1/1 | 20/8 | |
| 4 | 2000/666.7 | 11 | 6323 | 2/2 | 40/18 | |
| 5 | 100/-727.6 | 6.7 | 6000 | 1/1 | 22/10 | |
| 6 | 21.23/7.08 | 1.3 | 5000 | 1/1 | 8/3 | |
| 7 | 1200/400 | 7.3 | 6323 | 1/1 | 40/20 | |
| 8 | 100/-908.93 | 8.3 | 6323 | 1/1 | 40/18 | |
| 9 | 600/200 | 3.3 | 8000 | 1/1 | 20/8 | |
| 10 | 600/200 | 3.3 | 8000 | 1/1 | 20/8 | |
| 11 | 600/200 | 3.3 | 8000 | 1/1 | 20/8 |
| X/R Ratio | Percentage/% |
|---|---|
| 0–6 | 30.4 |
| 6–12 | 38.6 |
| >12 | 31.0 |
| Lines | DCPF/p.u. | QAPF/p.u. | ACPF/p.u. | Relative Deviation of DCPF/% | Relative Deviation of QAPF/% |
|---|---|---|---|---|---|
| 29-62 | 0.7280 | 0.7302 | 0.7369 | 1.21 | 0.91 |
| 10-22 | 2.8449 | 2.8765 | 2.9762 | 4.41 | 3.35 |
| 26-8 | 4.3714 | 4.4729 | 4.6750 | 6.49 | 4.32 |
| 75-74 | 2.1398 | 2.1478 | 2.1247 | 0.71 | 1.09 |
| 52-23 | 0.3527 | 0.2925 | 0.2787 | 26.55 | 4.95 |
| 85-62 | 1.2155 | 1.2365 | 1.2812 | 5.13 | 3.49 |
| 60-30 | 2.0866 | 2.0961 | 2.1875 | 4.61 | 4.36 |
| 4-41 | 4.3251 | 4.3290 | 4.4769 | 3.39 | 3.30 |
| 36-78 | 0.7012 | 0.7298 | 0.7620 | 7.98 | 4.23 |
| 59-79 | 4.4857 | 4.4721 | 4.5929 | 2.33 | 2.63 |
| Model Type | Objective Value/103 ¥ | Start-Up/Shut-Down Cost/103 ¥ | Fuel Cost/103 ¥ | Time/s |
|---|---|---|---|---|
| MILP | 9131.74 | 497 | 8634.74 | 17.48 |
| MINNP | 9112.92 | 461 | 8651.92 | 477.96 |
| MICP | 9112.10 | 461 | 8651.10 | 225.11 |
| Unit Type | Bus | Upper/Lower Limits (MW) | Ramping Up/Down Limits (MW/min) | Fuel-Cost Coefficients Of Thermal Units | Minimum On/Off Periods | Start-Up/Shut-Down Cost (103 ¥) | ||
|---|---|---|---|---|---|---|---|---|
| Ai,2/(¥/MW2h)) | Ai,1/(¥/(MWh)) | Ai,0/(¥/h) | ||||||
| Coal-fired thermal | MAW1 | 320/180 | 4.5 | 0.027 | 270 | 9198 | 96/12 | 800/180 |
| MAW3 | 330/180 | 4.5 | 0.027 | 279 | 9198 | 96/12 | 800/180 | |
| MAW6 | 330/180 | 4.5 | 0.027 | 279 | 9198 | 96/12 | 800/180 | |
| Gas-fired thermal | QIW1 | 370/240 | 16.7 | - | 582.35 | - | 2/2 | 150/50 |
| MSH7 | 120/100 | 16.7 | - | 722.99 | - | 2/2 | 100/50 | |
| NED1 | 370/240 | 16.7 | - | 582.35 | - | 2/2 | 105/34.39 | |
| NSg1 | 120/95 | 5.715 | - | 722.99 | - | 2/1 | 100/50 | |
| BCg5 | 132/100 | 10 | - | 722.99 | - | 2/1 | 105/55 | |
| ZHYg4 | 156/120 | 10 | - | 722.99 | - | 2/1 | 30/25 | |
| YHg1 | 124/95 | 10 | - | 722.99 | - | 2/1 | 100/30 | |
| PSH | SXg1 | 306/−324 | 999 | - | - | - | 1/1 | 80/40 |
| SXg2 | 306/−324 | 999 | - | - | - | 1/1 | 80/40 | |
| Transmission Sections | Lines in the Sections | Security Limit Power (MW) |
|---|---|---|
| 1 | LINGKUN-I, II + PENGSHEN-I, II | 2600 |
| 2 | LINGSHEN-I, II | 2900 |
| 3 | SHAJING-I, II | 3400 |
| 4 | ANFEN-I, II | 1150 |
| 5 | ANXIANG-I, II | 1150 |
| 6 | JINGTING-I, II | 1020 |
| 7 | PENGJI-I, II | 920 |
| 8 | LINGKUN-I, II+HEHUI | 2000 |
| 9 | KUNDING-I, II+JIAOHONG-I, II | 1280 |
| 10 | JINGXIAN-I, II+JINGLONG-I, II | 1300 |
| Lines | DCPF/p.u. | QAPF/p.u. | ACPF/p.u. | Relative Deviation of DCPF/% | Relative Deviation of QAPF /% |
|---|---|---|---|---|---|
| PENGC-SHENZ | 3.9137 | 4.3104 | 4.2900 | 8.77 | 0.48 |
| PENGC-QINSH | 4.6672 | 4.7129 | 4.7125 | 0.96 | 0.01 |
| SHENZ-SX | 4.1002 | 4.0894 | 4.0913 | 0.22 | 0.05 |
| ZIJ-XIX | 0.2090 | 0.2750 | 0.2686 | 22.19 | 2.39 |
| BAOA-PENGC | 18.8617 | 20.7136 | 20.9567 | 9.99 | 1.16 |
| MAAO-JIAOY | 0.9738 | 1.0748 | 1.1290 | 13.75 | 4.80 |
| FENJ-PIPA | 3.3359 | 3.4547 | 3.5074 | 4.89 | 1.50 |
| XIX-WUC | 0.0791 | 0.0692 | 0.0688 | 14.95 | 0.65 |
| HUANL-XIUL | 2.9891 | 3.0064 | 3.0075 | 0.61 | 0.04 |
| HUANG-BINH | 4.7930 | 4.8161 | 4.8185 | 0.53 | 0.05 |
| Model Type | Objective Value/103 ¥ | Start-Up/Shut-Down Cost/103 ¥ | Fuel Cost/103 ¥ | Time/s |
|---|---|---|---|---|
| MILP | 42,492.87 | 3644.78 | 38,848.09 | 930 |
| MINNP | 40,974.04 | 2140.15 | 38,833.89 | 21,098 |
| MICP | 40,997.57 | 2179.17 | 38,818.40 | 10,509 |
| Date | Model Type | Objective Value/103 ¥ | Time/s | Solution Status |
|---|---|---|---|---|
| Aug. 16 | MILP | 31,996.17 | 892 | Converged |
| MINNP | 31,022.57 | 22,893 | Converged | |
| MICP | 31,021.59 | 10,335 | Converged | |
| Aug. 17 | MILP | 35,896.17 | 932 | Converged |
| MINNP | - | - | Not converged | |
| MICP | 35,391.24 | 10,127 | Converged | |
| Aug. 18 | MILP | 35,691.06 | 879 | Converged |
| MINNP | 35,162.01 | 22,980 | Converged | |
| MICP | 35,165.04 | 10,628 | Converged | |
| Aug. 19 | MILP | 33,892.81 | 899 | Converged |
| MINNP | 33,274.89 | 23,890 | Converged | |
| MICP | 33,272.70 | 10,522 | Converged | |
| Aug. 20 | MILP | 31,293.23 | 882 | Converged |
| MINNP | - | - | Not converged | |
| MICP | 30,892.23 | 10,267 | Converged | |
| Aug. 21 | MILP | 42,492.87 | 930 | Converged |
| MINNP | 40,994.04 | 21,098 | Converged | |
| MICP | 40,997.57 | 10,509 | Converged |
| Ratio of SR Capacity Requirement | Whether SR Capacity of PSH Units are Considered | Total Costs/103 ¥ | Relative Reduction of Total Cost/% | Operation Costs of Thermal Units/103 ¥ | Start-Up/Shut-Down Costs of Thermal Units/103 ¥ |
|---|---|---|---|---|---|
| Lu% = 3%, Ld% = 1% | YES | 41579.27 | 0.57 | 38839.49 | 2499.78 |
| NO | 41816.70 | 39795.53 | 1781.17 | ||
| Lu% = 4%, Ld% = 2% | YES | 42758.14 | 3.22 | 39272.97 | 3245.17 |
| NO | 44133.06 | 41023.28 | 2869.78 | ||
| Lu% = 5%, Ld% = 3% | YES | 44413.60 | 5.49 | 40122.82 | 4050.78 |
| NO | 46853.91 | 43101.35 | 3512.56 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, S.; Fan, G.; Lu, Y.; Liu, M.; Lu, Y.; Li, Q. A Mixed-Integer Convex Programming Algorithm for Security-Constrained Unit Commitment of Power System with 110-kV Network and Pumped-Storage Hydro Units. Energies 2019, 12, 3646. https://doi.org/10.3390/en12193646
Lin S, Fan G, Lu Y, Liu M, Lu Y, Li Q. A Mixed-Integer Convex Programming Algorithm for Security-Constrained Unit Commitment of Power System with 110-kV Network and Pumped-Storage Hydro Units. Energies. 2019; 12(19):3646. https://doi.org/10.3390/en12193646
Chicago/Turabian StyleLin, Shunjiang, Guansheng Fan, Yuan Lu, Mingbo Liu, Yi Lu, and Qifeng Li. 2019. "A Mixed-Integer Convex Programming Algorithm for Security-Constrained Unit Commitment of Power System with 110-kV Network and Pumped-Storage Hydro Units" Energies 12, no. 19: 3646. https://doi.org/10.3390/en12193646
APA StyleLin, S., Fan, G., Lu, Y., Liu, M., Lu, Y., & Li, Q. (2019). A Mixed-Integer Convex Programming Algorithm for Security-Constrained Unit Commitment of Power System with 110-kV Network and Pumped-Storage Hydro Units. Energies, 12(19), 3646. https://doi.org/10.3390/en12193646