Voltage Source Operation of the Energy-Router Based on Model Predictive Control


 ,
, 
Abstract
:1. Introduction
- Power control (active and reactive power injection/absorption);
- voltage control (compensation of voltage sags and peaks, control of voltage harmonics, frequency control inside the building);
- current control (harmonic cancelation, short-circuit current limitation);
- simplifies integration of distributed energy sources (provides DC and AC ports control);
- protection functions (island detection, frequency, voltage and current monitoring, short circuit protection);
- increased reliability (modular structure, redundant supply, on/off-grid operation).
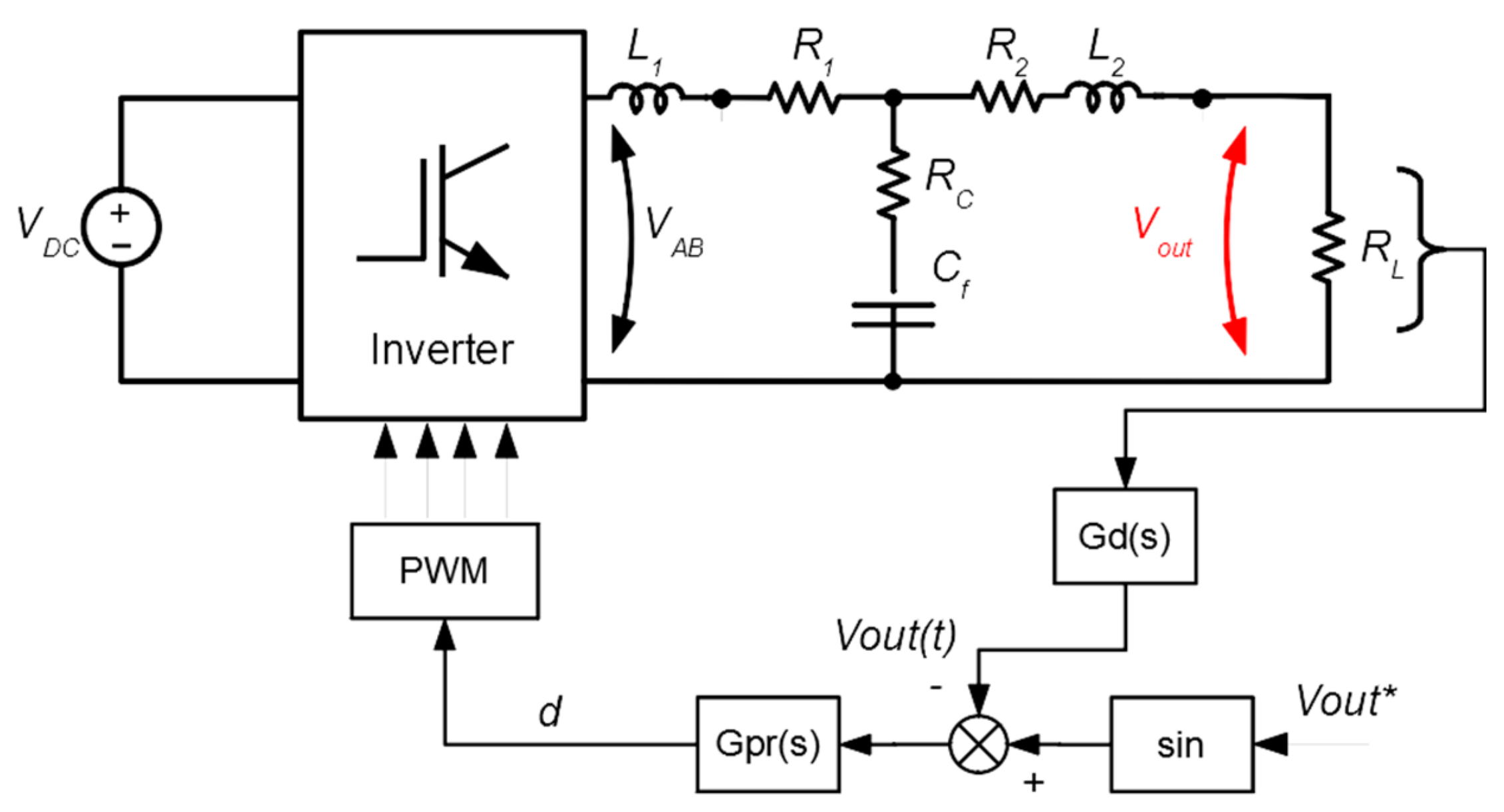
2. Voltage Source Operation of the Output Inverter
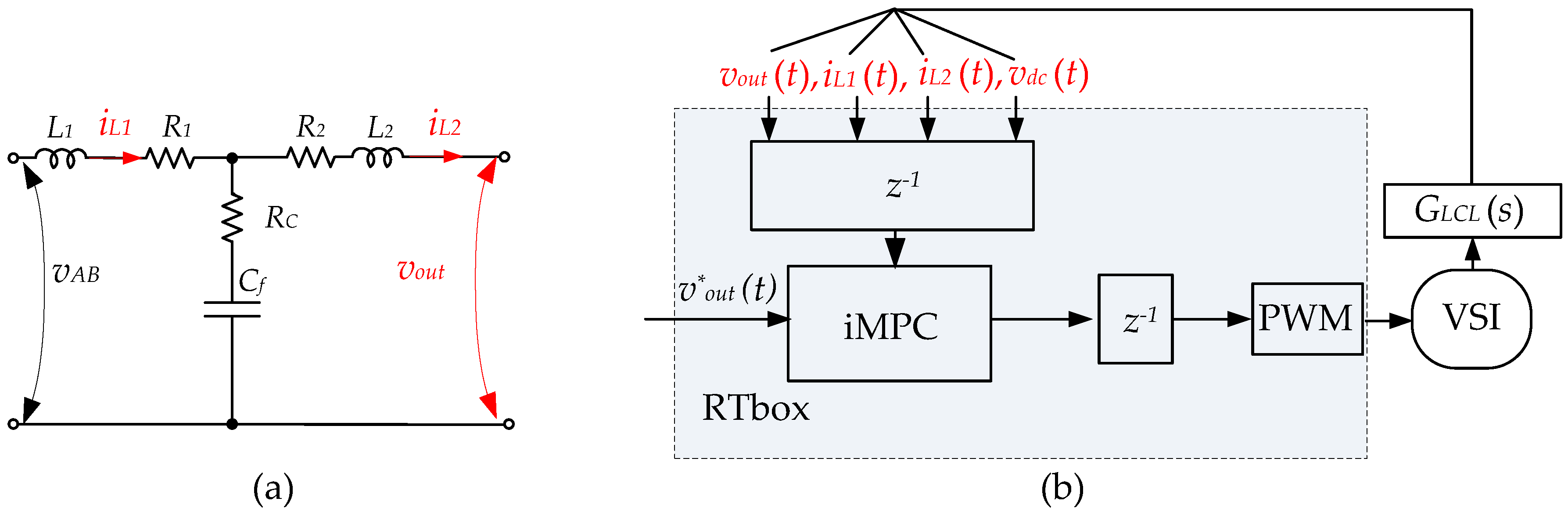
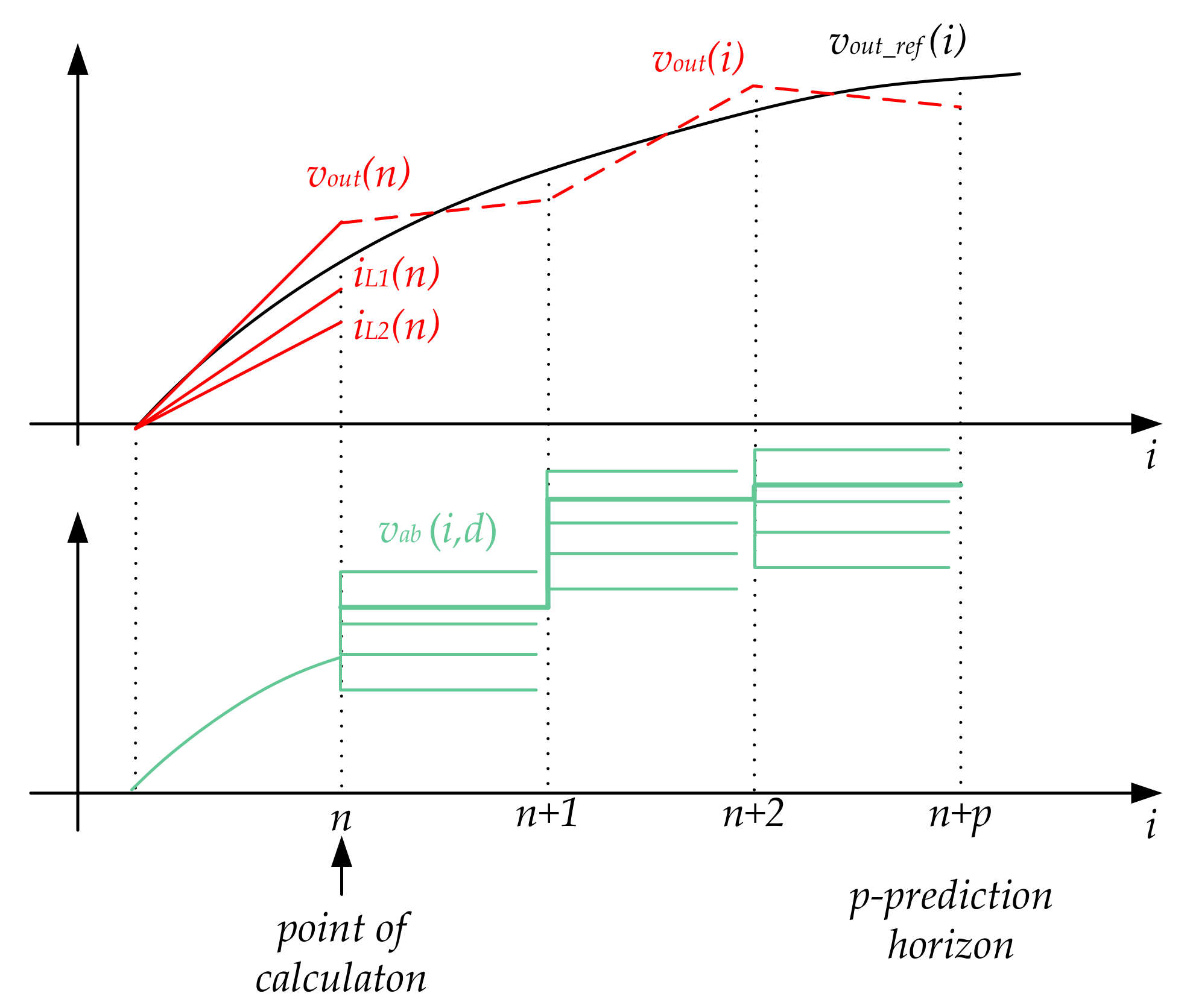
3. Indirect Model Predictive Control Proposed for Voltage Source Mode
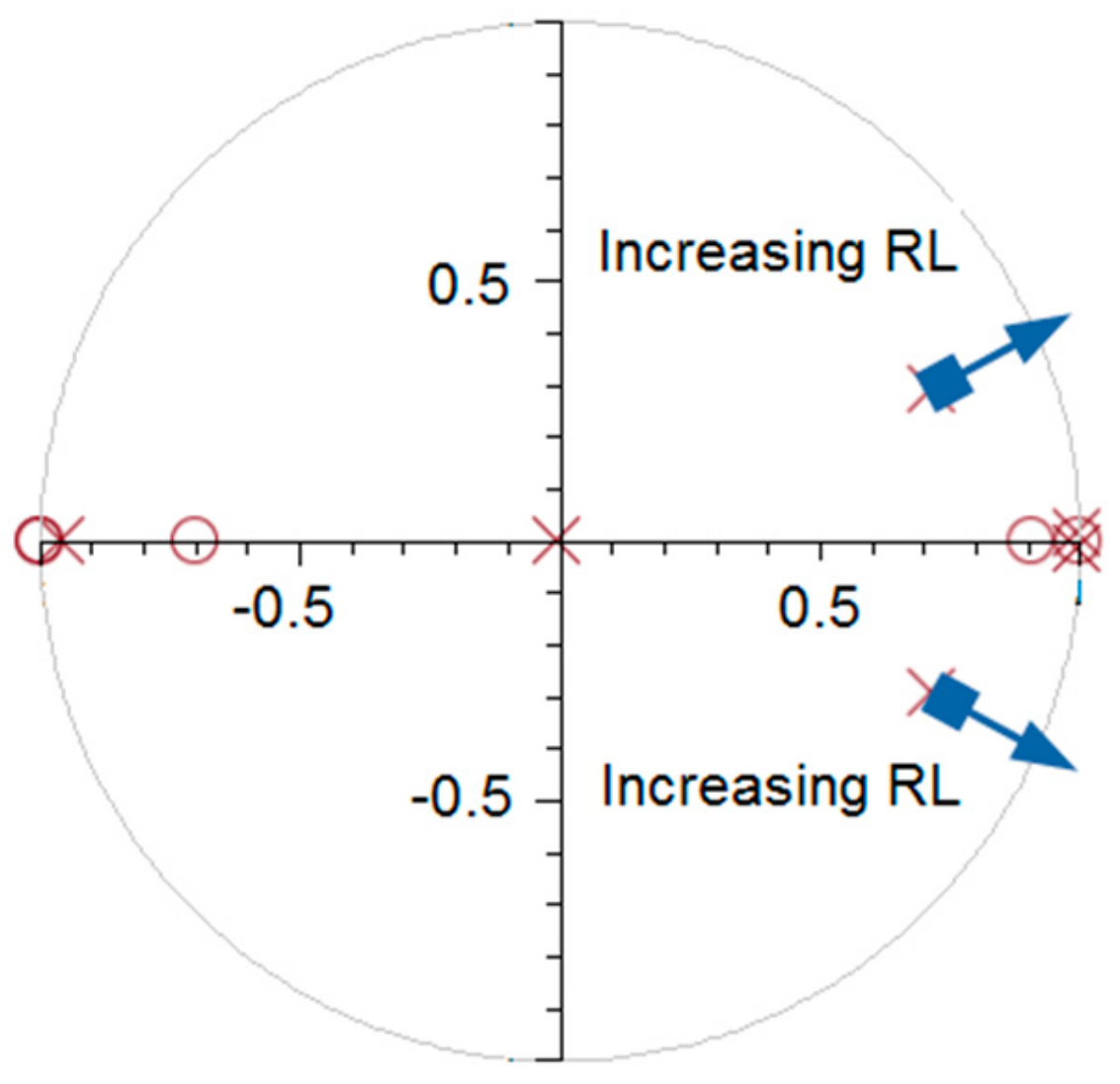
4. Optimal Parameters Selection of iMPC
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, Y.; Fang, Y.; Li, J. Interconnecting microgrids via the energy router with smart energy management. Energies 2017, 10, 1297. [Google Scholar]
- Huang, A.Q.; Crow, M.L.; Heydt, G.T.; Zheng, J.P.; Dale, S.J. The future renewable electric energy delivery and management (FREEDM) system: The energy internet. IEEE 2011, 99, 133–148. [Google Scholar] [CrossRef]
- Fu, R.; Remo, T.; Margolis, R. 2018 U.S. Utility-Scale Photovoltaics Plus-Energy Storage System Costs Benchmark. Report of National Renewable Energy Laboratory. Available online: www.nrel.gov/publications (accessed on 22 March 2019).
- Liu, Y.; Li, Y.; Liang, H.; He, J.; Cui, H. Energy routing control strategy for integrated microgrids including photovoltaic, battery-energy storage and electric vehicles. Energies 2019, 12, 302. [Google Scholar] [CrossRef]
- Ray, O.; Mishra, S. Integrated hybrid output converter as power router for renewable-based nanogrids. In Proceedings of the In IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 001645–001650. [Google Scholar]
- Zhen, L.; Penghua, L.; Wanxing, S.; Songhuai, D.; Qing, D.; Zhipeng, L. Research on a household energy router for energy internet. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 952–957. [Google Scholar]
- Hagh, M.T.; Aghdam, F.H. Smart hybrid nanogrids using modular multiport power electronic interface. In Proceedings of the 2016 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia), Melbourne, Australia, 28 November–1 December 2016; pp. 618–623. [Google Scholar]
- Mishra, S.; Ray, O. Advances in nanogrid technology and its integration into rural electrification in India. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 2707–2713. [Google Scholar]
- Pedrasa, M.; Spooner, T. A survey of techniques used to control microgrid generation and storage during island operation. Available online: https://pdfs.semanticscholar.org/01f7/e8ceb853c7bc1073ad390b3dc6736ca31c41.pdf (accessed on 29 April 2019).
- Engler, A.; Soultanis, N. Droop control in LV-grids. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 18 November 2005; p. 6. [Google Scholar]
- Shoeiby, B.; Davoodnezhad, R.; Holmes, D.G.; McGrath, B.P. A resonant current regulator based microgrid control strategy with smooth transition between islanded and grid-connected modes. In Proceedings of the 2014 IEEE 5th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Galway, Ireland, 24–27 June 2014. [Google Scholar]
- Roasto, I.; Rosin, A.; Jalakas, T. Power electronic interface converter for resource efficient buildings. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 3638–3643. [Google Scholar]
- Roasto, I.; Rosin, A.; Jalakas, T. Multiport interface converter with an energy storage for nanogrids. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 6088–6093. [Google Scholar]
- Majumder, R. A hybrid microgrid with dc connection at back to back converters. IEEE Trans. Smart Grid 2014, 5, 251–259. [Google Scholar] [CrossRef]
- Boroyevich, D.; Cvetkovic, I.; Dong, D.; Burgos, R.; Wang, F.; Lee, F. Future electronic power distribution systems a contemplative view. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment, Basov, Romania, 20–22 May 2010; pp. 1369–1380. [Google Scholar]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Tran. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Timbus, A.; Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F. Evaluation of current controllers for distributed power generation systems. IEEE Trans. Power Electron. 2009, 24, 654–664. [Google Scholar] [CrossRef]
- Zeng, Z.; Yang, H.; Zhao, R.; Cheng, C. Topologies and control strategies of multi-functional grid-connected inverters for power quality enhancement: A comprehensive review. Renew. Sust. Energ. Rev. 2013, 24, 223–270. [Google Scholar] [CrossRef]
- Husev, O.; Chub, A.; Romero-Cadaval, E.; Roncero-Clemente, C.; Vinnikov, D. Hysteresis current control with distributed shoot-through states for impedance source inverters. Int. J. Circuit Theory Appl. 2015, 44, 783–797. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kolar, J.; Espinoza, J.; Rivera, M.; Rojas, C. Predictive torque and flux control of an induction machine fed by an indirect matrix converter with reactive power minimization. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 3177–3183. [Google Scholar]
- Kennel, R.; Linder, A. Predictive control of inverter supplied electrical drives. Proceedings of 2000 IEEE 31st Annual Power Electronics Specialists Conference. Conference Proceedings (Cat. No.00CH37018), Galway, Ireland, 23 June 2000. [Google Scholar]
- Gholami-Khesht, H.; Monfared, M. Deadbeat direct power control for grid connected inverters using a full-order observer. In Proceedings of the 2015 4th International Conference on Electric Power and Energy Conversion Systems (EPECS), Sharjah, UAE, 24–26 November 2015; pp. 1–5. [Google Scholar]
- Buso, S.; Caldognetto, T.; Brandao, D.I. Oversampled dead-beat current controller for voltage source converters. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1493–1500. [Google Scholar]
- Wang, L.; Ertugrul, N.; Kolhe, M. Evaluation of dead beat current controllers for grid connected converters. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Tianjin, China, 21–24 May 2012; pp. 1–7. [Google Scholar]
- Jiao, J.; Nelms, R.M. Regulating output impedance using a PI controller to improve the stability of a single phase inverter under weak grid. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar]
- Sato, Y.; Ishizuka, T.; Nezu, K.; Kataoka, T. A new control strategy for voltage-type PWM rectifiers to realize zero steady-state control error in input current. IEEE Trans. Ind. Appl. 1998, 34, 480–486. [Google Scholar] [CrossRef]
- Chattopadhyay, R.; De, A.; Bhattacharya, S. Comparison of PR controller and damped PR controller for grid current control of LCL filter based grid-tied inverter under frequency variation and grid distortion. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 3634–3641. [Google Scholar]
- Husev, O.; Roncero-Clemente, C.; Makovenko, E.; Pimentel, S.P.; Vinnikov, D.; Martins, J. Optimization and implementation of the proportional-resonant controller for grid-connected inverter with significant computation delay. IEEE Trans. Ind. Electron. 2019, 1. [Google Scholar] [CrossRef]
- Cutler, R.; Ramaker, B.L. Dynamic Matrix Control—A Computer Control Algorithm. Available online: https://www.infona.pl/resource/bwmeta1.element.ieee-art-000004232009 (accessed on 20 April 2019).
- Richalet, J.; Rault, A.; Testud, J.D.; Papon, J. Model predictive heuristic control: applications to industrial processes. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive control for power converters and drives: Advances and trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inf. 2013, 9, 1013–1016. [Google Scholar] [CrossRef]
- Anas, A.; Ellis, M.J.; Bernal, J.E.T.; Wenzel, M.J. Practice-Oriented System Identification Strategies for MPC of Building Thermal and HVAC Dynamics. Available online: https://docs.lib.purdue.edu/cgi/viewcontent.cgi?article=1254&context=ihpbc (accessed on 21 April 2019).
- Ellis Matthew, J.; Alanqar, A. Formulation and Application of an Economic Model Predictive Control Scheme for Thermostats. Available online: https://docs.lib.purdue.edu/cgi/viewcontent.cgi?article=1262&context=ihpbc (accessed on 18 April 2019).
- Zhang, Z.; Li, Z.; Kazmierkowski, M.P.; Rodriguez, J.; Kennel, R. Robust predictive control of three-level npc back-to-back converter pmsg wind turbine systems with revised predictions. IEEE Trans. Power Electron. 2018, 33, 9588–9598. [Google Scholar]
- Zhang, X.; Tan, L.; Xian, J.; Zhang, H.; Ma, Z.; Kang, J. Direct grid-side current model predictive control for grid-connected inverter with LCL filter. IET Power Electron. 2018, 11, 2450–2460. [Google Scholar] [CrossRef]
- Moreno, J.C.; Huerta, J.M.E.; Gil, R.G.; González, S.A. A robust predictive current control for three-phase grid-connected inverters. IEEE Trans. Ind. Electron. 2009, 56, 1993–2004. [Google Scholar] [CrossRef]
- Wang, X.; Zou, J.; Peng, Y.; Xie, C.; Li, K.; M, J.; Zapata, G. Elimination of zero sequence circulating currents in paralleled three-level T-type inverters with a model predictive control strategy. IET Power Electron. 2008, 11, 2573–2581. [Google Scholar] [CrossRef]
- Yang, G.; Hao, S.; Fu, C.; Chen, Z. Model predictive direct power control based on improved T—Type Grid Connected Inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 7, 252–260. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power step in experiments | 0–700 W |
| Input DC voltage VIN | 400 V |
| Output AC RMS voltage VOUT | 230 V |
| Inverter side inductor L1 | 1.44 mH |
| Resistance of L1 windings R1 | 0.05 Ω |
| Output side inductor L2 | 0.6 mH |
| Resistance of L2 windings R2 | 0.03 Ω |
| Filter capacitor Cf | 9.6 µF |
| Resistance of Cf RC | 0.5 Ω |
| Sampling frequency fS | 20 kHz |
| Switching frequency fSW | 20 kHz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roasto, I.; Husev, O.; Najafzadeh, M.; Jalakas, T.; Rodriguez, J. Voltage Source Operation of the Energy-Router Based on Model Predictive Control. Energies 2019, 12, 1892. https://doi.org/10.3390/en12101892
Roasto I, Husev O, Najafzadeh M, Jalakas T, Rodriguez J. Voltage Source Operation of the Energy-Router Based on Model Predictive Control. Energies. 2019; 12(10):1892. https://doi.org/10.3390/en12101892
Chicago/Turabian StyleRoasto, Indrek, Oleksandr Husev, Mahdiyyeh Najafzadeh, Tanel Jalakas, and Jose Rodriguez. 2019. "Voltage Source Operation of the Energy-Router Based on Model Predictive Control" Energies 12, no. 10: 1892. https://doi.org/10.3390/en12101892
APA StyleRoasto, I., Husev, O., Najafzadeh, M., Jalakas, T., & Rodriguez, J. (2019). Voltage Source Operation of the Energy-Router Based on Model Predictive Control. Energies, 12(10), 1892. https://doi.org/10.3390/en12101892