Influence of Sampling Delay on the Estimation of Lithium-Ion Battery Parameters and an Optimized Estimation Method

Abstract
:1. Introduction
2. Influence of Sampling Delay on Battery Parameter Estimation
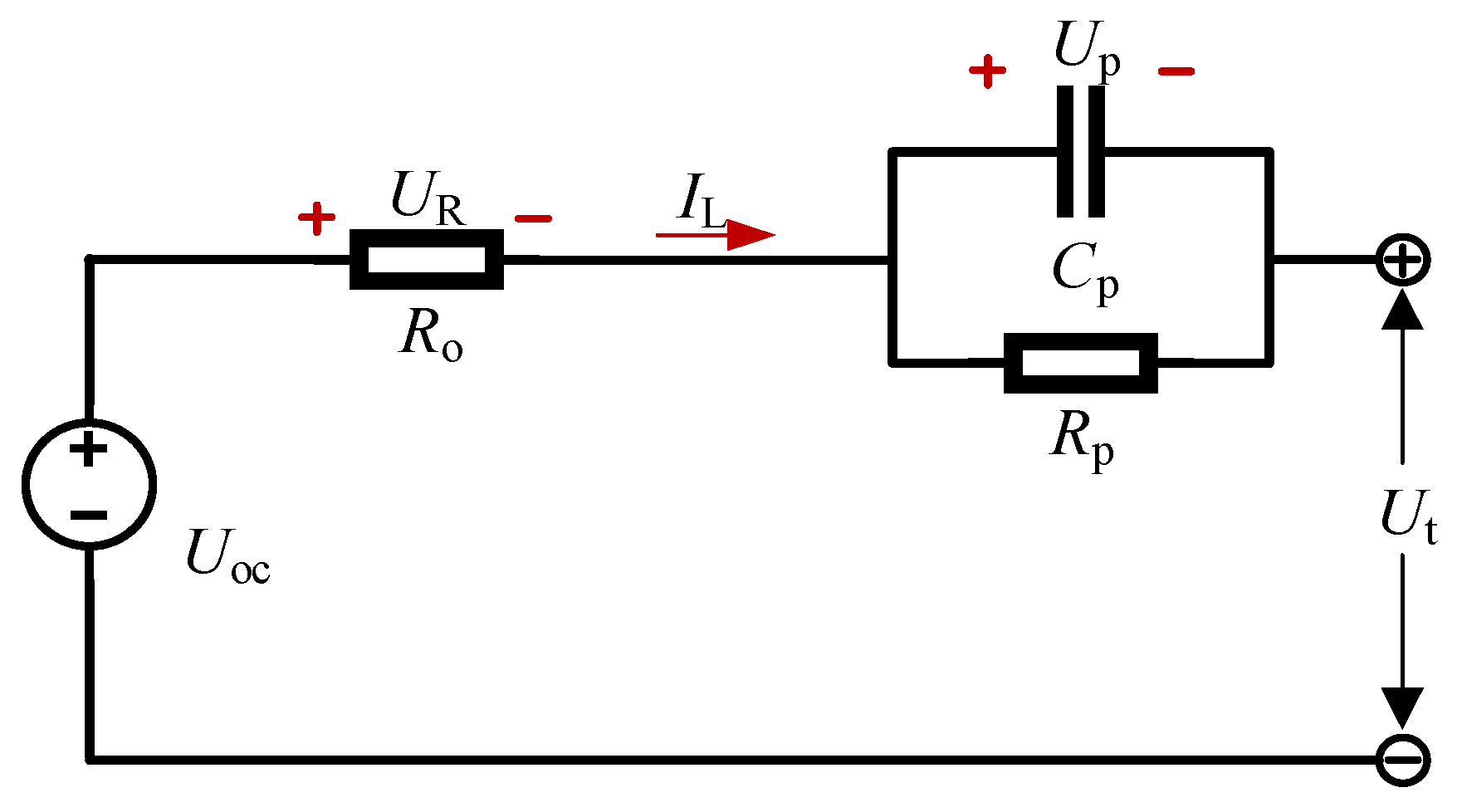
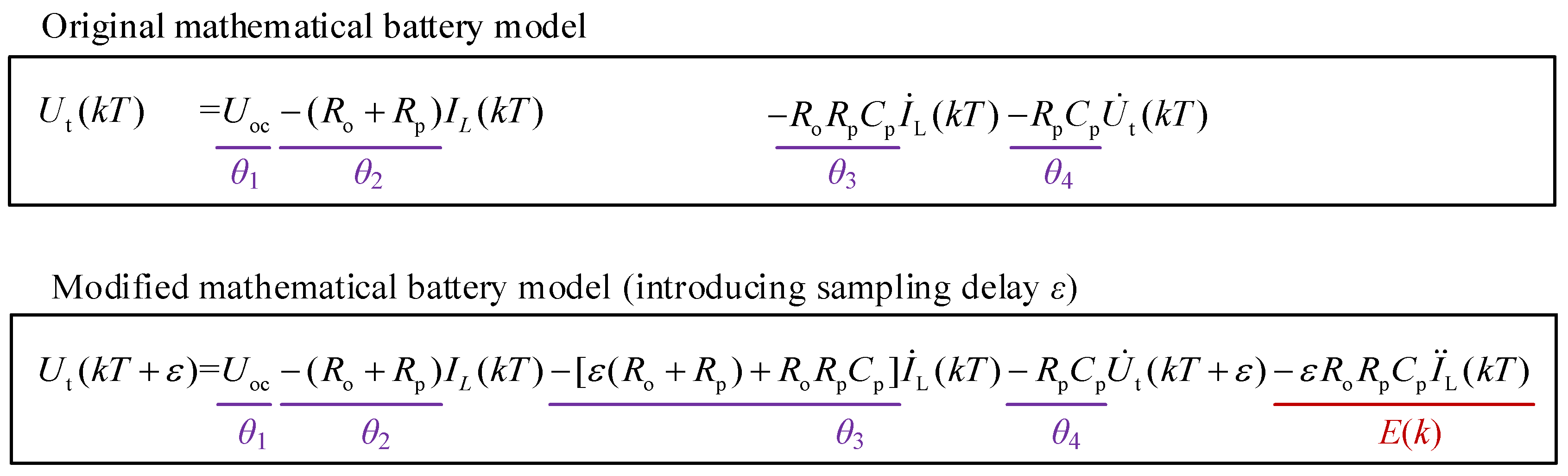
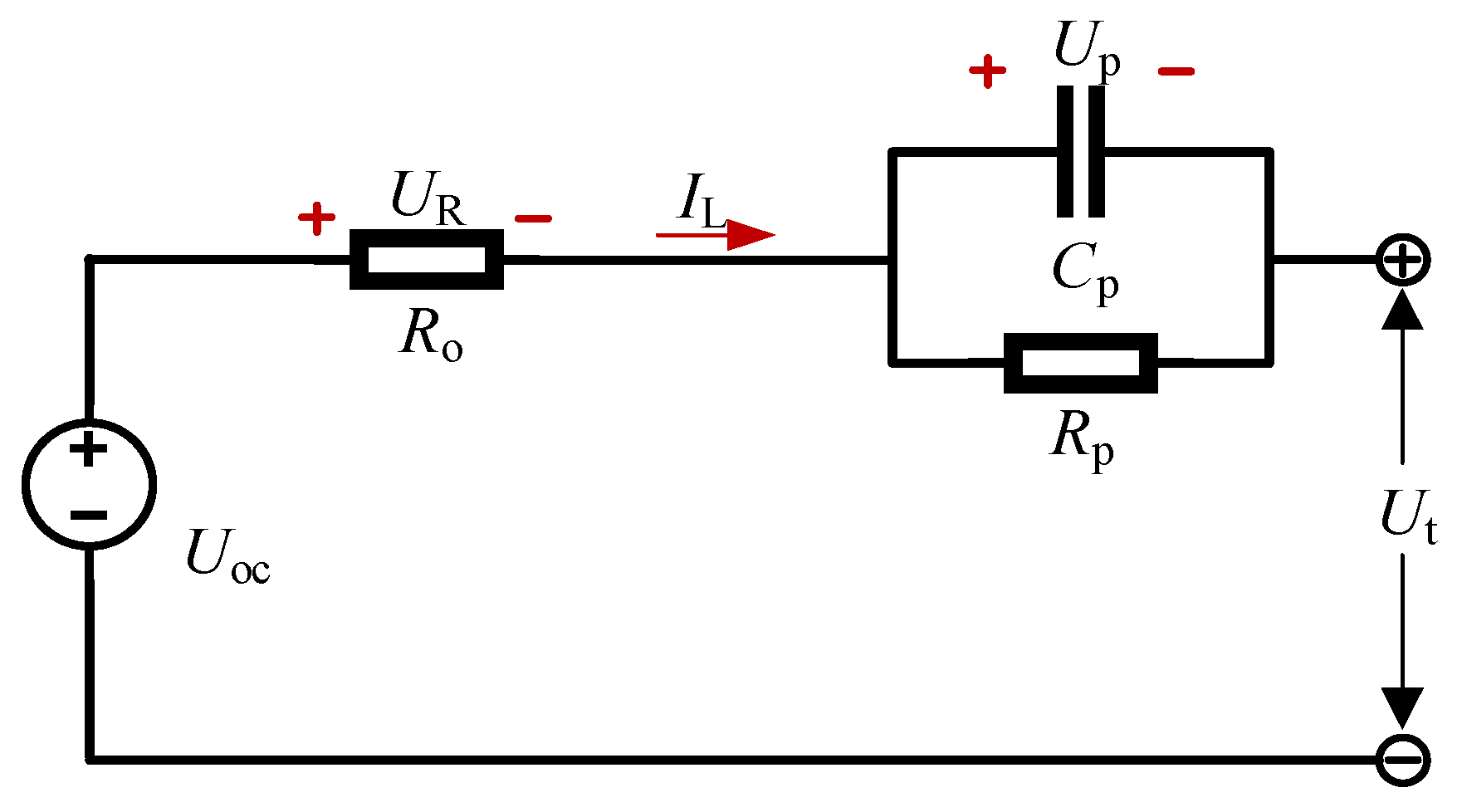
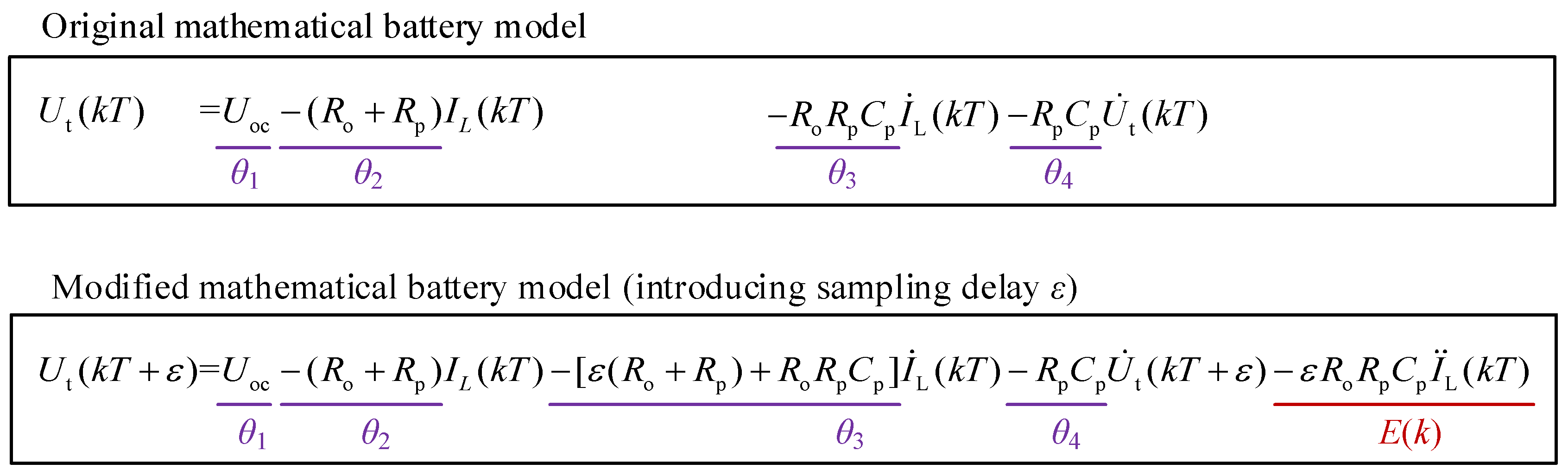
2.1. Mathematical Battery Model
2.2. Influence of Sampling Delay
3. Optimized Estimation Method for Battery Parameter
4. Data Set of Lithium-Ion Battery for Verification
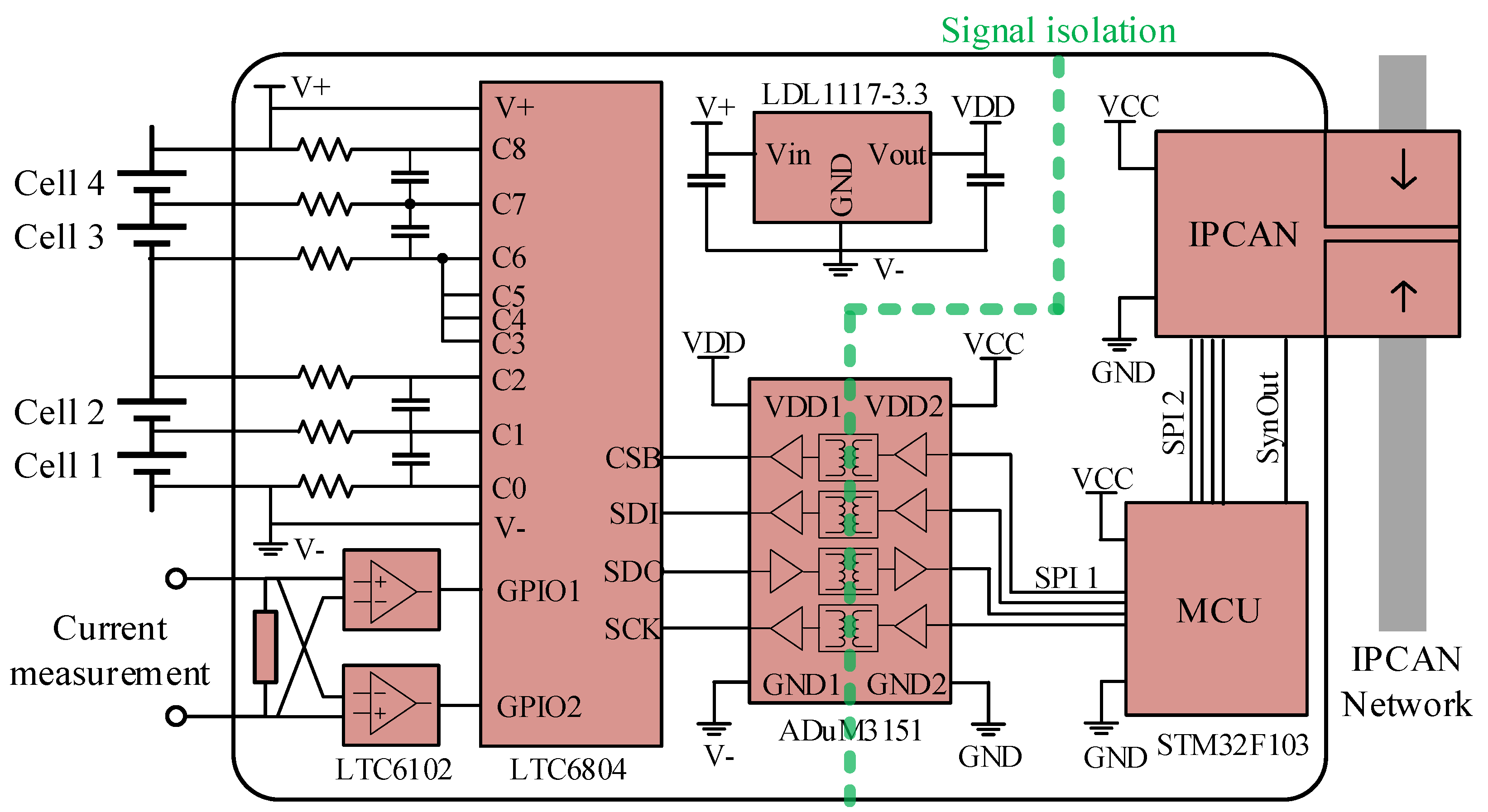
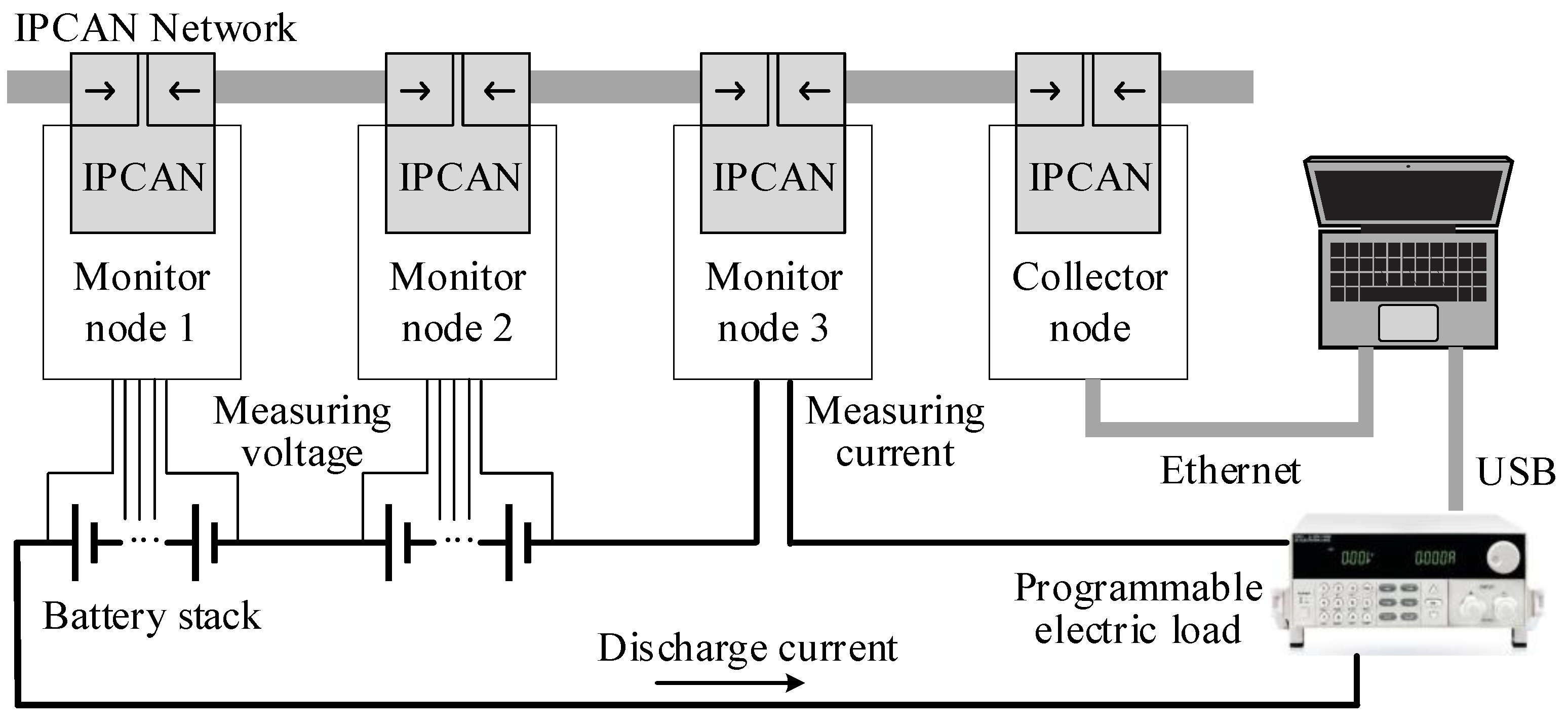
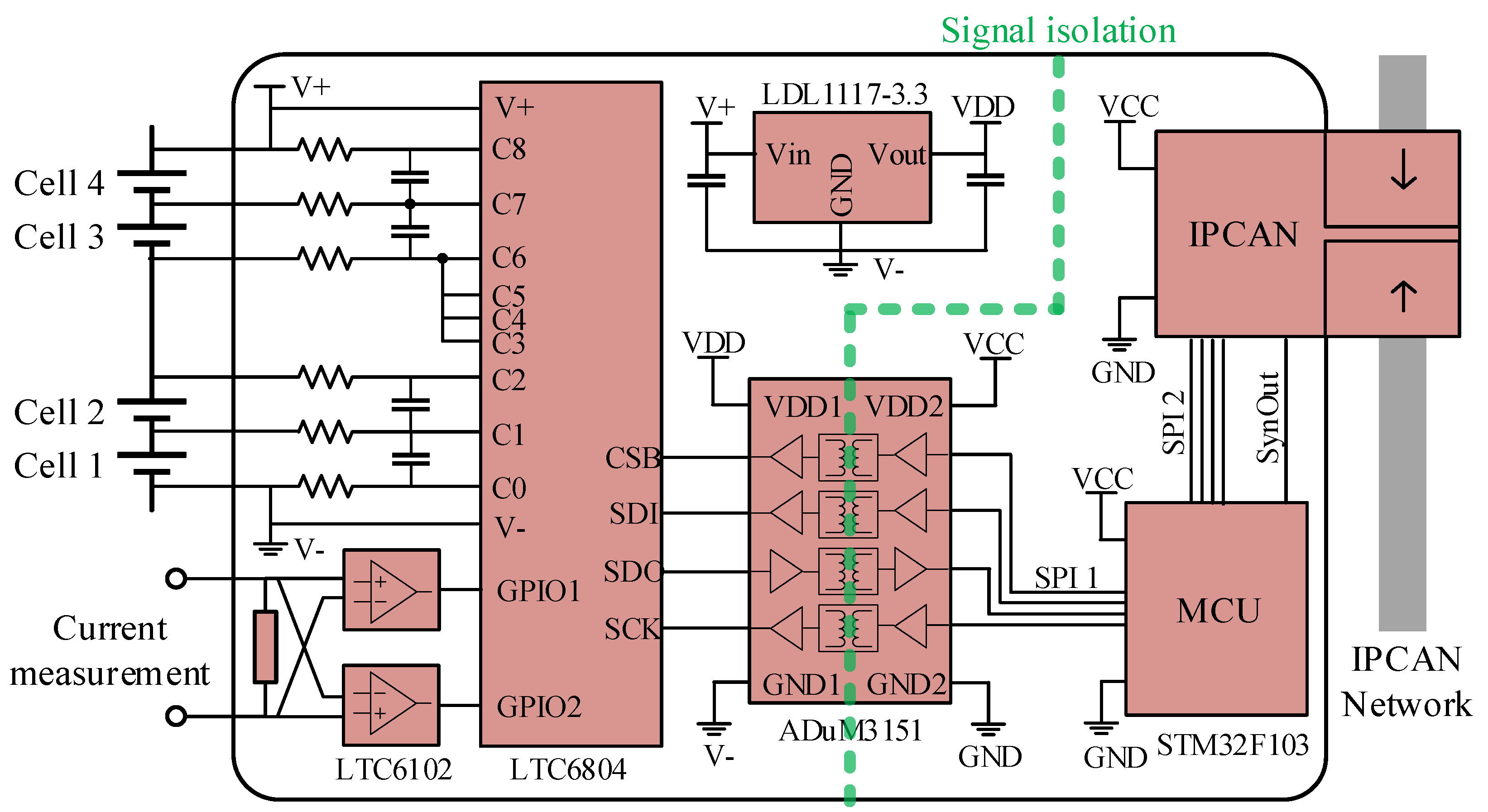
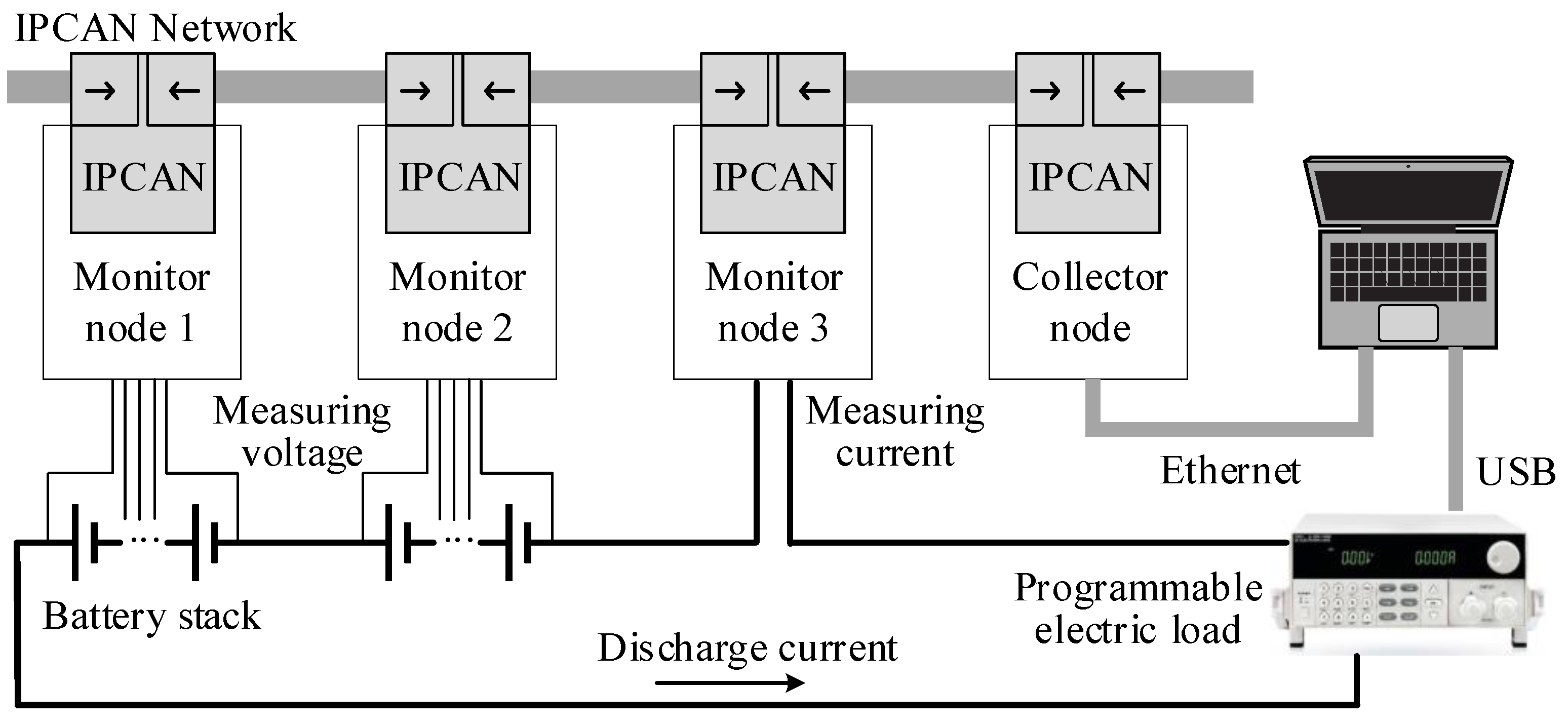
4.1. Experiment Setup
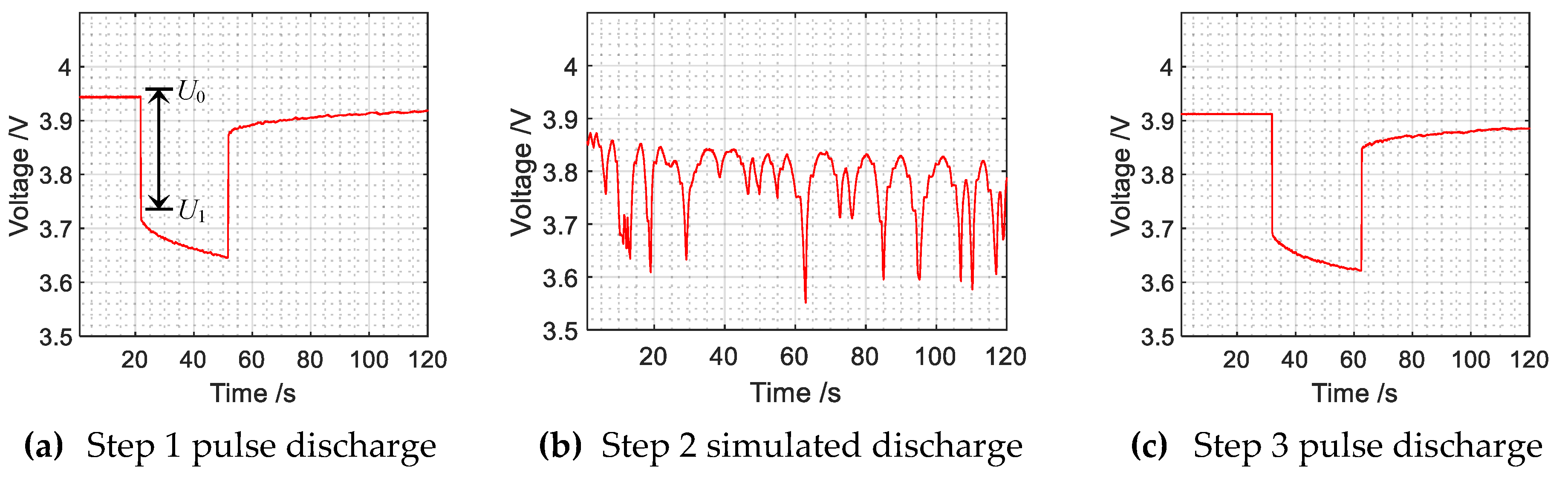
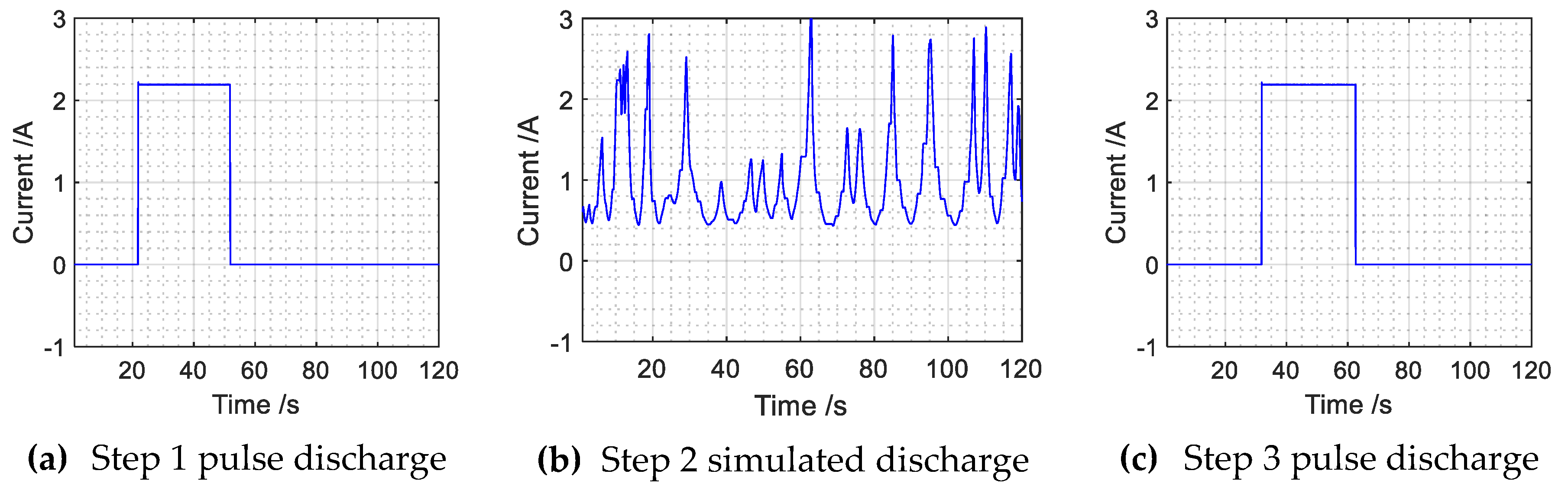
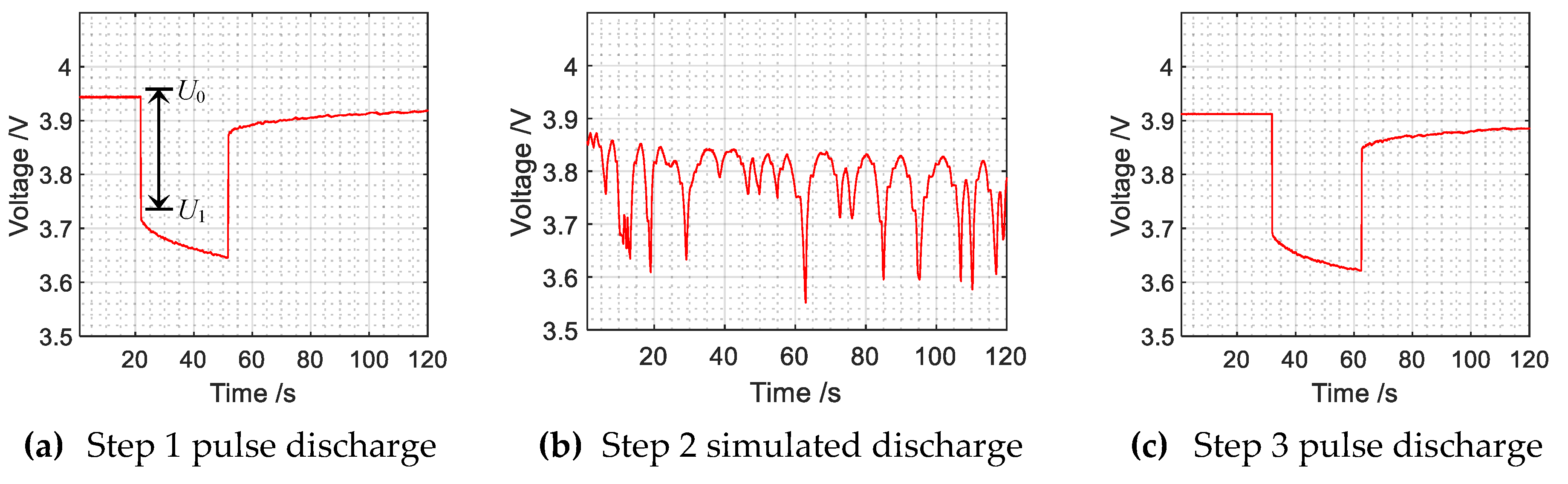
4.2. Battery Test
5. Verification and Evaluation
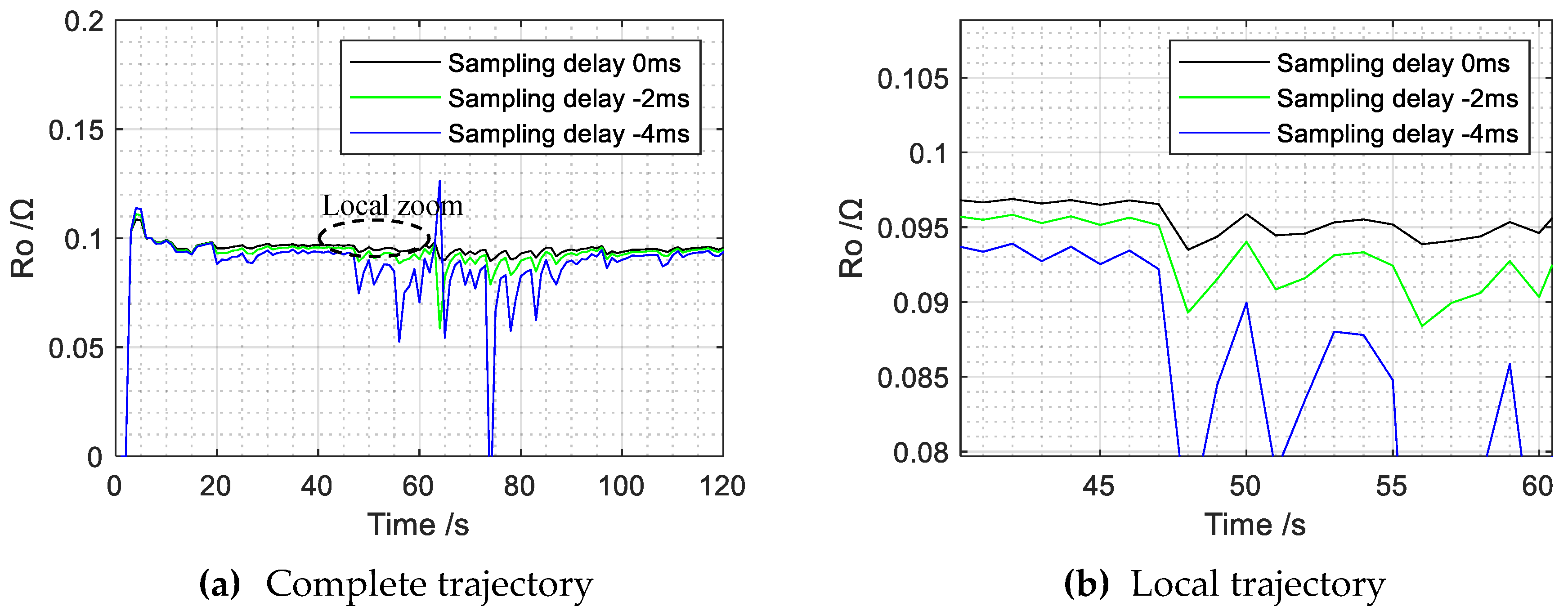
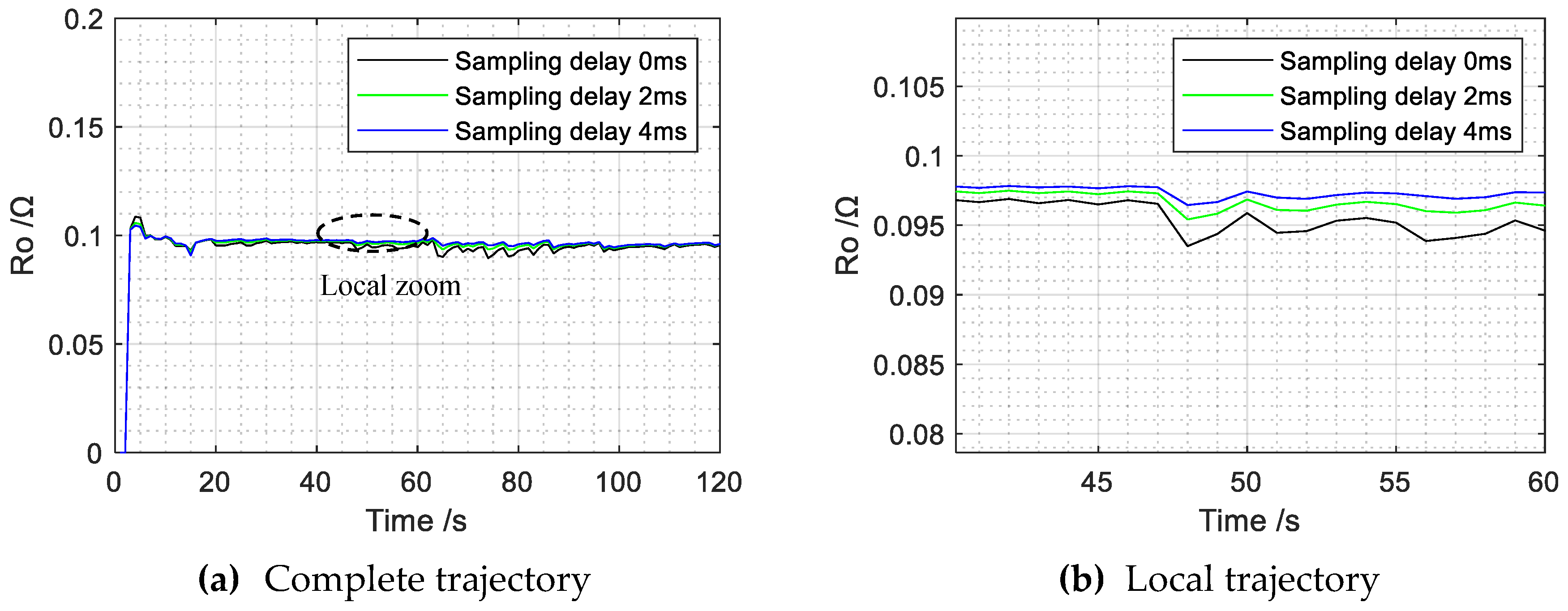
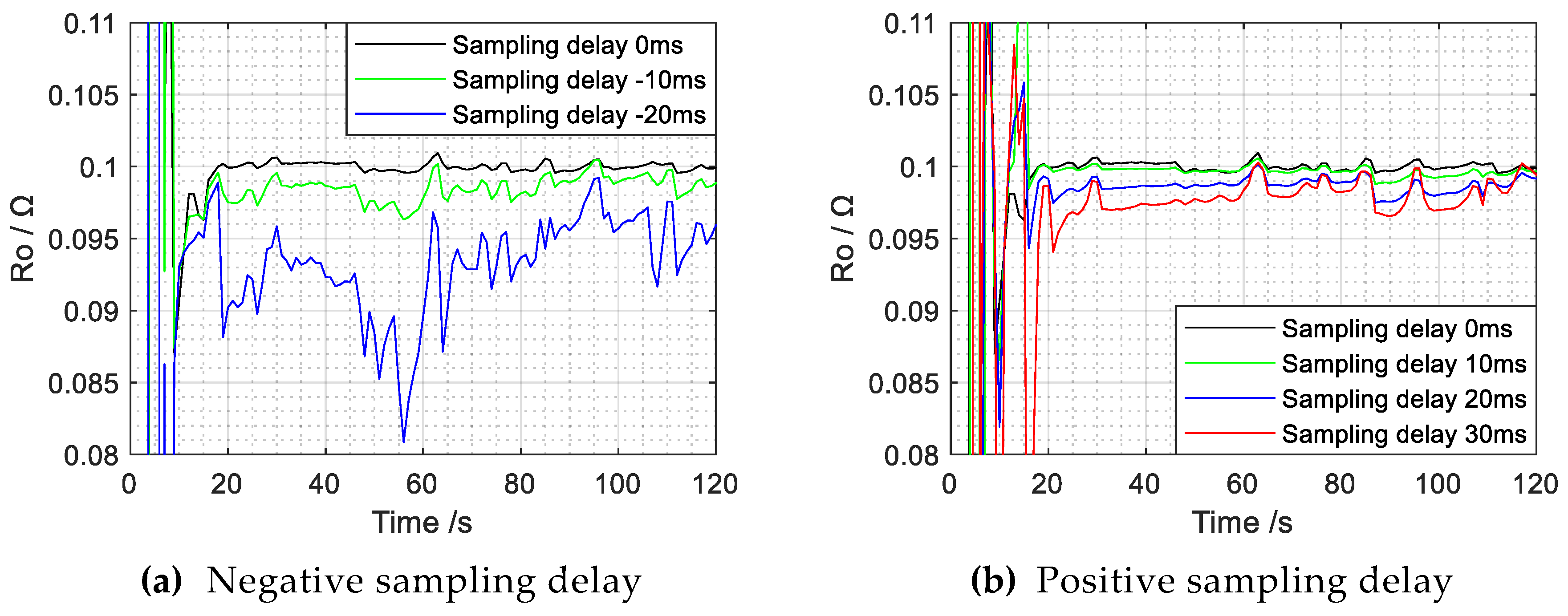
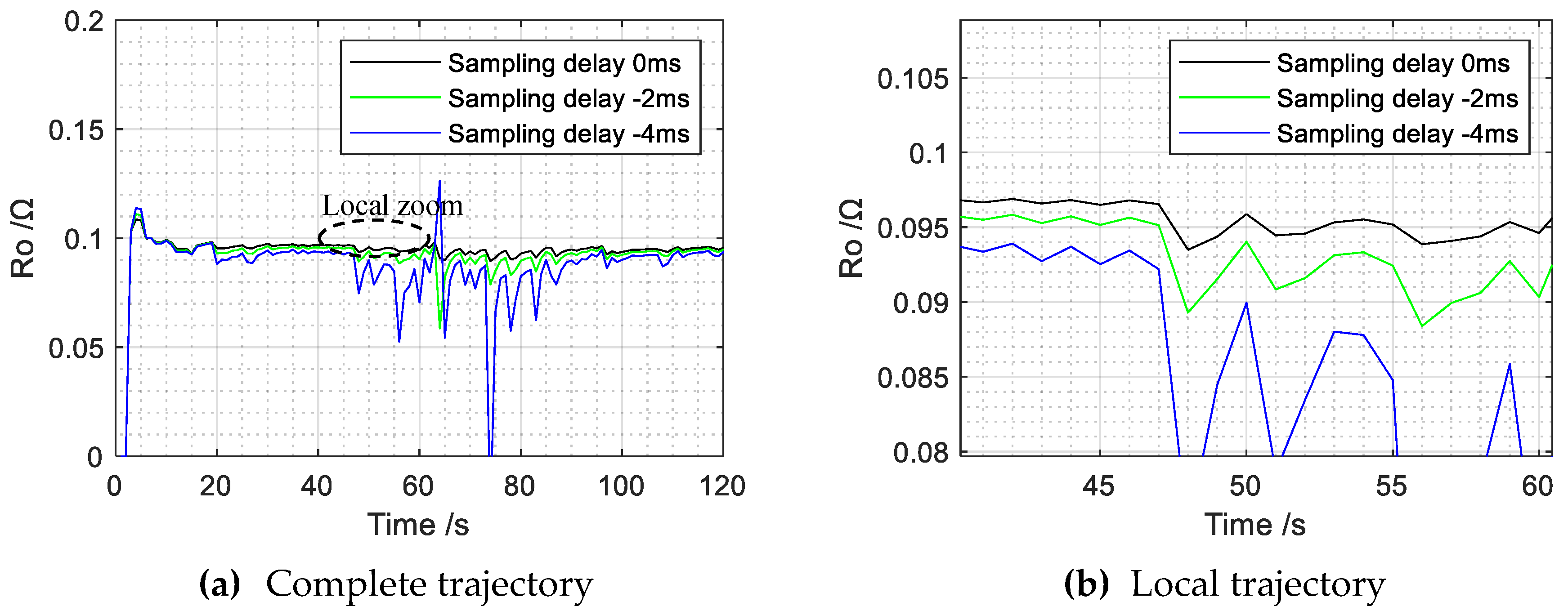
5.1. The Influence of Sampling Delay on Traditional Estimation Method
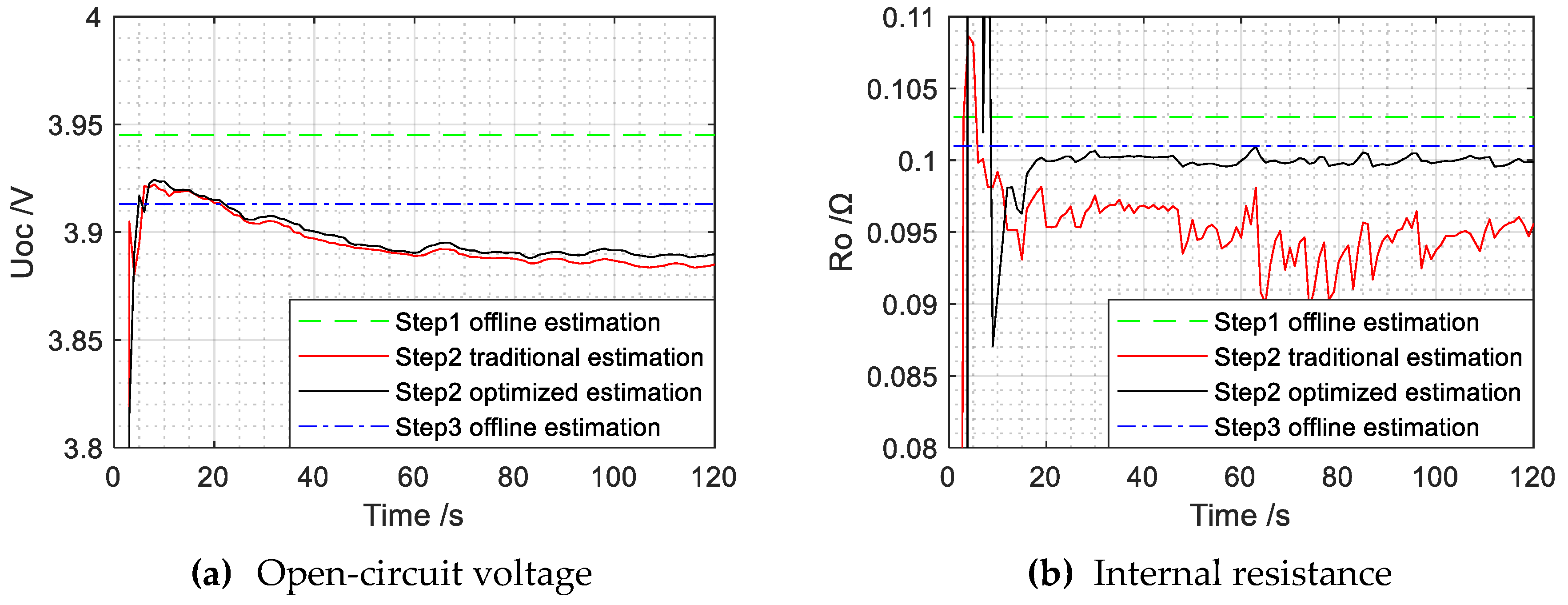
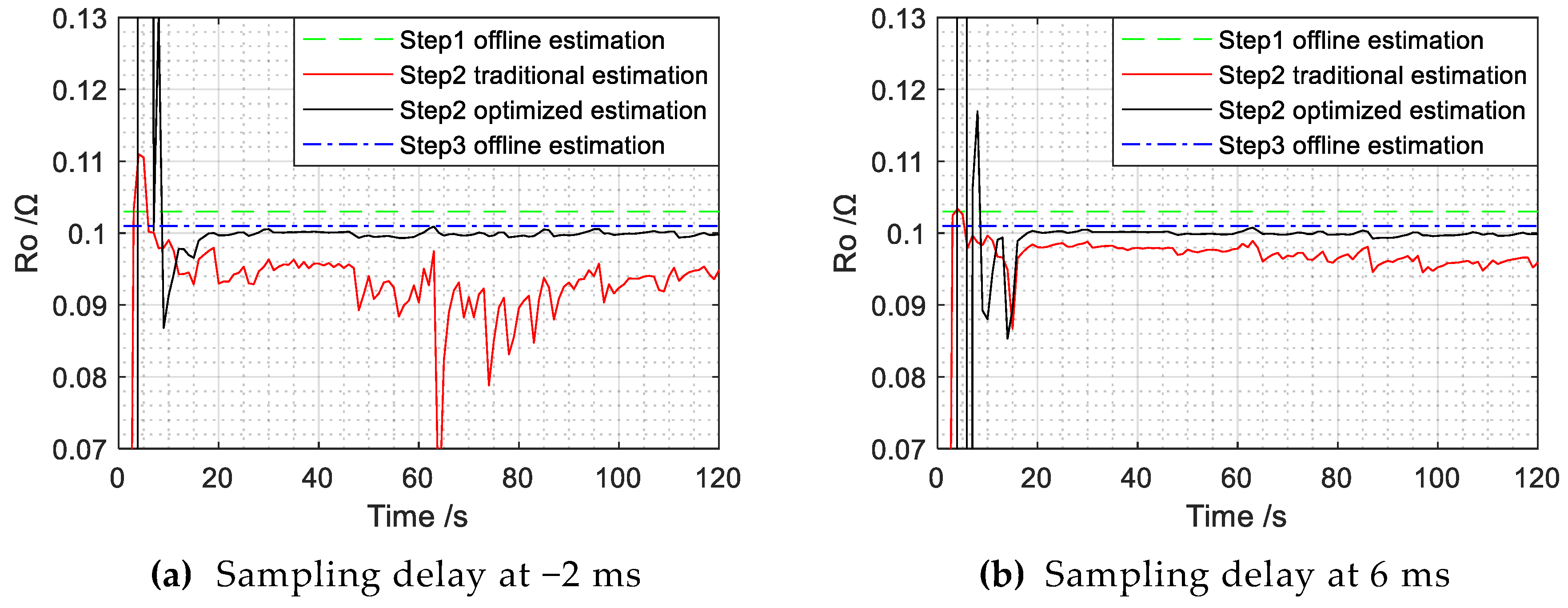
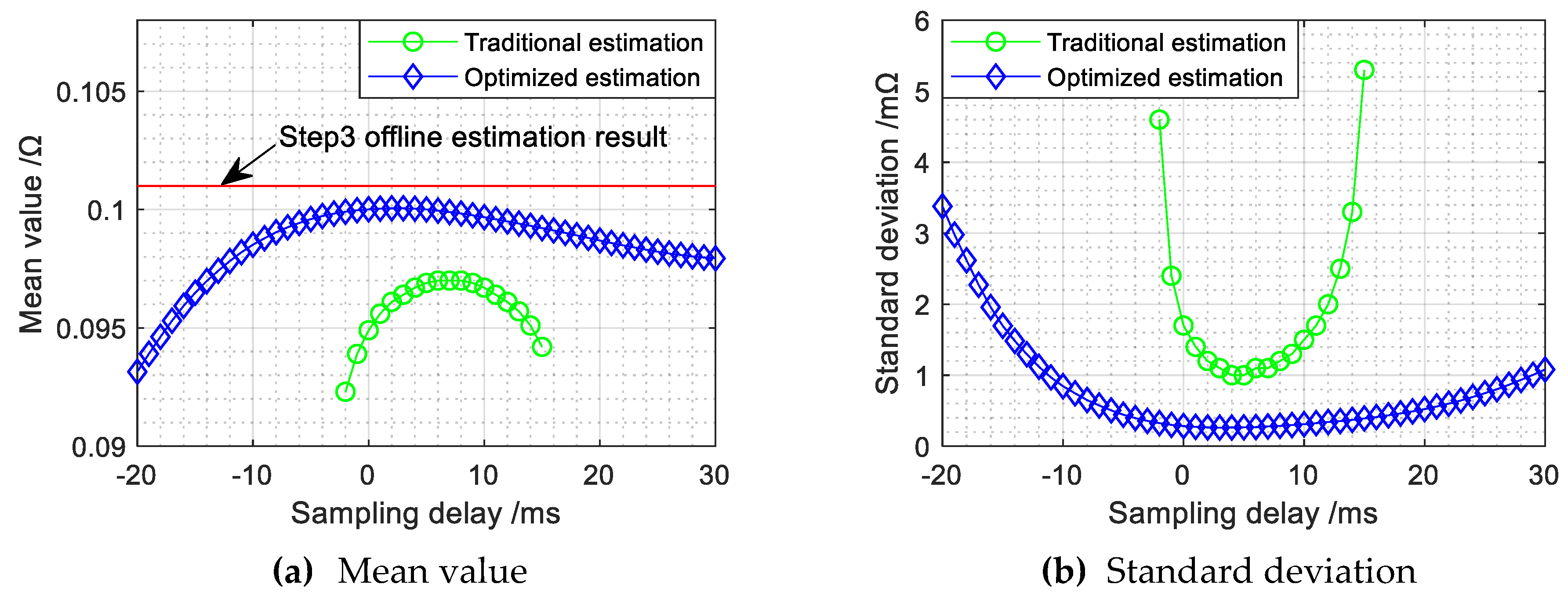
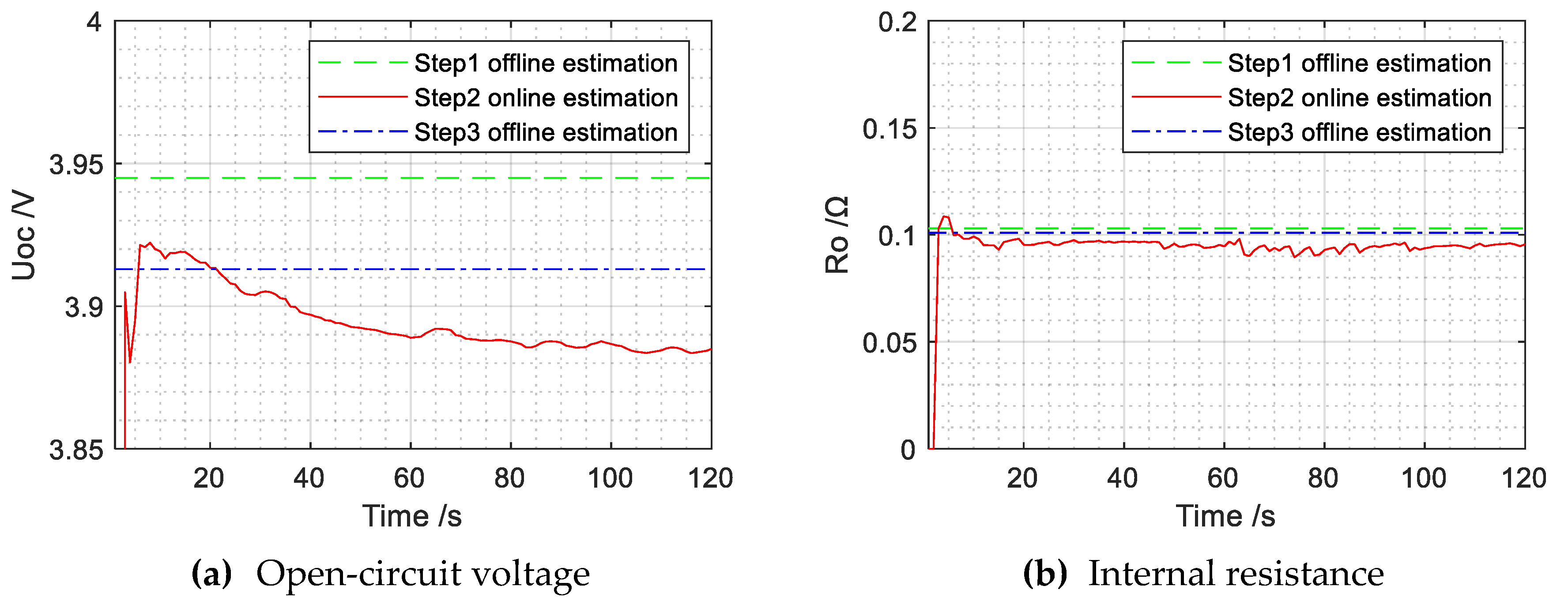
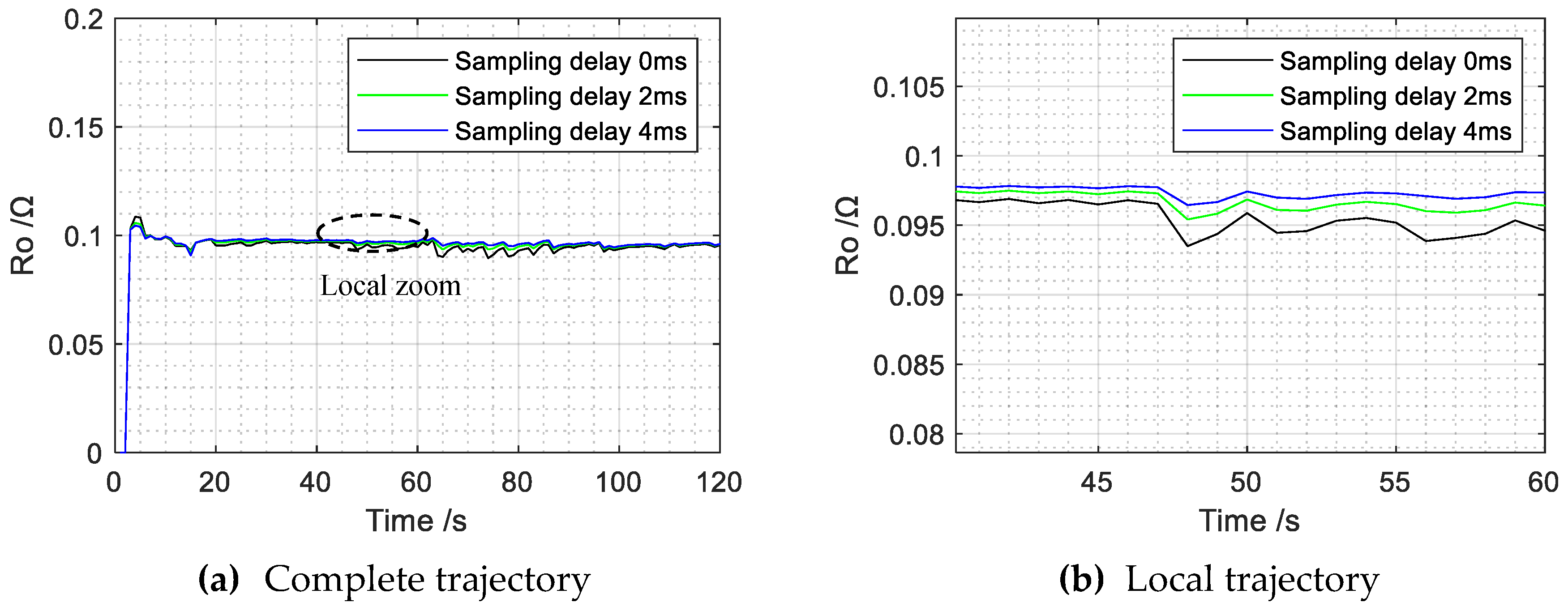
5.2. The Performance of the Optimized Estimation Method
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A Review on the Key Issues for Lithium-Ion Battery Management in Electric Vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Zheng, Y.; Ouyang, M.; Han, X.; Lu, L.; Li, J. Investigating the Error Sources of the Online State of Charge Estimation Methods for Lithium-Ion Batteries in Electric Vehicles. J. Power Sources 2018, 377, 161–188. [Google Scholar] [CrossRef]
- Berecibar, M.; Gandiaga, I.; Villarreal, I.; Omar, N.; Van Mierlo, J.; Van den Bossche, P. Critical Review of State of Health Estimation Methods of Li-Ion Batteries for Real Applications. Renew. Sustain. Energy Rev. 2016, 56, 572–587. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Lee, J.; Cho, B.H. State-Of-Charge and Capacity Estimation of Lithium-Ion Battery Using a New Open-Circuit Voltage Versus State-Of-Charge. J. Power Sources 2008, 185, 1367–1373. [Google Scholar] [CrossRef]
- Pattipati, B.; Balasingam, B.; Avvari, G.V.; Pattipati, K.R.; Bar-Shalom, Y. Open Circuit Voltage Characterization of Lithium-Ion Batteries. J. Power Sources 2014, 269, 317–333. [Google Scholar] [CrossRef]
- Remmlinger, J.; Buchholz, M.; Meiler, M.; Bernreuter, P.; Dietmayer, K. State-Of-Health Monitoring of Lithium-Ion Batteries in Electric Vehicles by On-Board Internal Resistance Estimation. J. Power Sources 2011, 196, 5357–5363. [Google Scholar] [CrossRef]
- Ramadesigan, V.; Northrop, P.W.; De, S.; Santhanagopalan, S.; Braatz, R.D.; Subramanian, V.R. Modeling and Simulation of Lithium-Ion Batteries from a Systems Engineering Perspective. J. Electrochem. Soc. 2012, 159, R31–R45. [Google Scholar] [CrossRef]
- Li, J.; Wang, L.; Lyu, C.; Wang, H.; Liu, X. New Method for Parameter Estimation of an Electrochemical-Thermal Coupling Model for LiCoO2 Battery. J. Power Sources 2016, 307, 220–230. [Google Scholar] [CrossRef]
- Kang, L.; Zhao, X.; Ma, J. A New Neural Network Model for the State-Of-Charge Estimation in the Battery Degradation Process. Appl. Energy 2014, 121, 20–27. [Google Scholar] [CrossRef]
- Charkhgard, M.; Farrokhi, M. State-Of-Charge Estimation for Lithium-Ion Batteries Using Neural Networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.; Sun, T. A Comparative Study of Different Equivalent Circuit Models for Estimating State-Of-Charge of Lithium-Ion Batteries. Electrochim. Acta 2018, 259, 566–577. [Google Scholar] [CrossRef]
- Nejad, S.; Gladwin, D.T.; Stone, D.A. A Systematic Review of Lumped-Parameter Equivalent Circuit Models for Real-Time Estimation of Lithium-Ion Battery States. J. Power Sources 2016, 316, 183–196. [Google Scholar] [CrossRef]
- Wang, S.; Verbrugge, M.; Wang, J.S.; Liu, P. Power Prediction from a Battery State Estimator that Incorporates Diffusion Resistance. J. Power Sources 2012, 214, 399–406. [Google Scholar] [CrossRef]
- Kalawoun, J.; Biletska, K.; Suard, F.; Montaru, M. From a Novel Classification of the Battery State of Charge Estimators toward a Conception of an Ideal One. J. Power Sources 2015, 279, 694–706. [Google Scholar] [CrossRef]
- Rahimi-Eichi, H.; Baronti, F.; Chow, M. Online Adaptive Parameter Identification and State-Of-Charge Coestimation for Lithium-Polymer Battery Cells. IEEE Trans. Ind. Electron. 2014, 61, 2053–2061. [Google Scholar] [CrossRef]
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Online Estimation of Peak Power Capability of Li-Ion Batteries in Electric Vehicles by a Hardware-In-Loop Approach. Energies 2012, 5, 1455–1469. [Google Scholar] [CrossRef]
- Gao, W.; Zou, Y.; Sun, F.; Hu, X.; Yu, Y.; Feng, S. Data Pieces-Based Parameter Identification for Lithium-Ion Battery. J. Power Sources 2016, 328, 174–184. [Google Scholar] [CrossRef]
- Chen, X.; Shen, W.; Cao, Z.; Kapoor, A. A Novel Approach for State of Charge Estimation Based on Adaptive Switching Gain Sliding Mode Observer in Electric Vehicles. J. Power Sources 2014, 246, 667–678. [Google Scholar] [CrossRef]
- Lin, C.; Mu, H.; Xiong, R.; Shen, W. A Novel Multi-Model Probability Battery State of Charge Estimation Approach for Electric Vehicles Using H-Infinity Algorithm. Appl. Energy 2016, 166, 76–83. [Google Scholar] [CrossRef]
- Feng, T.; Yang, L.; Zhao, X.; Zhang, H.; Qiang, J. Online Identification of Lithium-Ion Battery Parameters Based on an Improved Equivalent-Circuit Model and Its Implementation on Battery State-Of-Power Prediction. J. Power Sources 2015, 281, 192–203. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Guo, H. Online Estimation of Model Parameters and State-Of-Charge of LiFePO4 Batteries in Electric Vehicles. Appl. Energy 2012, 89, 413–420. [Google Scholar] [CrossRef]
- Chiang, Y.; Sean, W.; Ke, J. Online Estimation of Internal Resistance and Open-Circuit Voltage of Lithium-Ion Batteries in Electric Vehicles. J. Power Sources 2011, 196, 3921–3932. [Google Scholar] [CrossRef]
- Stuart, T.A.; Zhu, W. Modularized Battery Management for Large Lithium Ion Cells. J. Power Sources 2011, 196, 458–464. [Google Scholar] [CrossRef]
- Kong, X.; Zheng, Y.; Ouyang, M.; Li, X.; Lu, L.; Li, J.; Zhang, Z. Signal Synchronization for Massive Data Storage in Modular Battery Management System with Controller Area Network. Appl. Energy 2017, 197, 52–62. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A Comparative Study of Equivalent Circuit Models for Li-Ion Batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- He, H.; Zhang, X.; Xiong, R.; Xu, Y.; Guo, H. Online Model-Based Estimation of State-Of-Charge and Open-Circuit Voltage of Lithium-Ion Batteries in Electric Vehicles. Energy 2012, 39, 310–318. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.; Gong, X.; Gao, C. A Data-Driven Based Adaptive State of Charge Estimator of Lithium-Ion Polymer Battery Used in Electric Vehicles. Appl. Energy 2014, 113, 1421–1433. [Google Scholar] [CrossRef]
- Jiang, B.; Chen, M.; Chen, F. A Network Interface Device for Networked Control System with Time-Driven Mode. Microprocess. Microsyst. 2019, 64, 1–11. [Google Scholar] [CrossRef]
- Jiang, B.; Chen, M.; Chen, F. A Clock Drift Compensation Method for Synchronous Sampling in Sensor Networks. Meas. Sci. Technol. 2019, 30, 25103. [Google Scholar] [CrossRef]
- Pan, C.; Banks, C.E.; Song, W.; Wang, C.; Chen, Q.; Ji, X. Recent Development of LiNixCoyMnzO2: Impact of Micro/Nano Structures for Imparting Improvements in Lithium Batteries. Trans. Nonferr. Met. Soc. 2013, 23, 108–119. [Google Scholar] [CrossRef]
- Sun, F.; Xiong, R.; He, H.; Li, W.; Aussems, J.E.E. Model-Based Dynamic Multi-Parameter Method for Peak Power Estimation of Lithium–Ion Batteries. Appl. Energy 2012, 96, 378–386. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specification |
|---|---|
| Cathode | Lithium-ion NCM (active material) Polyvinylidene fluoride (binder) Carbon black (conductive material) |
| Anode | Graphite (active material) Polyvinylidene fluoride (binder) |
| Electrolyte | Organic solvents, lithium salt |
| Typical capacity | 2150 mAh (0.2C, 2.75 V discharge) |
| Maximum discharge current | 10 A (Continuous discharge) |
| Maximum charge current | 2.15 A (1C) |
| Nominal voltage | 3.62 V (1C discharge) |
| Charging voltage | 4.2 V ± 0.05 V |
| Discharge cut-off voltage | 2.75 V |
| Data Source | Battery Parameter | Estimation Result |
|---|---|---|
| Step 1 pulse discharge | Uoc | 3.945 V |
| Ro | 0.103 Ω | |
| Step 3 pulse discharge | Uoc | 3.913 V |
| Ro | 0.101 Ω |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, B.; Chen, Z.; Chen, F. Influence of Sampling Delay on the Estimation of Lithium-Ion Battery Parameters and an Optimized Estimation Method. Energies 2019, 12, 1878. https://doi.org/10.3390/en12101878
Jiang B, Chen Z, Chen F. Influence of Sampling Delay on the Estimation of Lithium-Ion Battery Parameters and an Optimized Estimation Method. Energies. 2019; 12(10):1878. https://doi.org/10.3390/en12101878
Chicago/Turabian StyleJiang, Bing, Zeqi Chen, and Feifan Chen. 2019. "Influence of Sampling Delay on the Estimation of Lithium-Ion Battery Parameters and an Optimized Estimation Method" Energies 12, no. 10: 1878. https://doi.org/10.3390/en12101878
APA StyleJiang, B., Chen, Z., & Chen, F. (2019). Influence of Sampling Delay on the Estimation of Lithium-Ion Battery Parameters and an Optimized Estimation Method. Energies, 12(10), 1878. https://doi.org/10.3390/en12101878