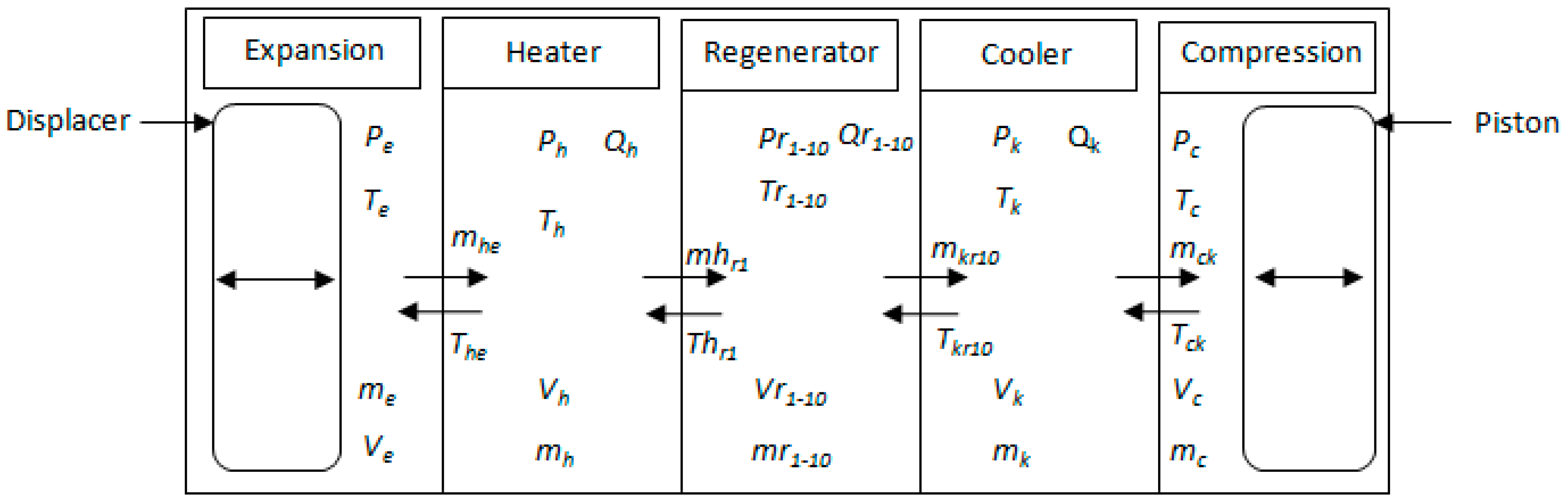
Numerical simulation of the FPSE requires accurate and careful calculation of the dynamic and thermodynamic features of the engine parameters, including the algorithm, to provide an effective solution and description of the output performance. In this study, MATLAB is employed to solve the motion equations of the piston displacer and the thermodynamic equations that describe the engine’s operation. The problem posed by the damping and spring stiffness on the stability of the engine is solved by calculation of these parameters at every iteration in the cycle and the convergence criterion was defined so as to achieve steady operation and calculate the output power. The regenerator, being a critical component of the FPSE as it determines the thermal efficiency, requires a careful approach in order to study and observe its performance; as a result it was divided into 10 parts to observe the behavioural characteristics and their influence on and by the heater and cooler, including the overall effect on the engine performance. Also, the regenerator matrix is divided into 10 parts so as to ensure optimal heat balance capacity and minimise flow losses, as the efficiency of the regenerator material is highly dependent on its thermal capacity. The computation is carried out in 1000 timesteps over 10 complete cycles; the output performance is determined and results are plotted. The solution to the difficulty of obtaining stable operation of the FPSE is obtained by calculating the damping coefficient of every iteration at a defined increment for every cycle and a criterion is defined for termination of the algorithm so as to converge and calculate the output power and efficiency of the FPSE, when the values of the expansion and compression space temperature at the beginning of the cycle are the same at the end of the cycle.
3.1. Assumptions of the Mathematical Model
To model the FPSE certain assumptions are required to represent the algorithm and also govern the performance characteristics of the engine parameters:
- (1)
The mass of the working gas in the chambers of the FPSE is constant.
- (2)
The working gas in the engine is an ideal gas. Helium is selected for this simulation.
- (3)
The thermal losses are derived using the superposition principle.
- (4)
The temperature of the working gas in the work spaces and heat exchangers changes with time over a complete cycle.
- (5)
The buffer pressure is equal to the average of the dynamic pressure in the compression space during oscillation of the piston.
- (6)
The operation of the engine is in a steady-state condition. The temperature of the expansion and compression space at the beginning of the cycle should be equal to the value at the end of the cycle to satisfy this criterion.
The equations and boundary conditions used for the modelling have been previously derived by the author, as reported in [
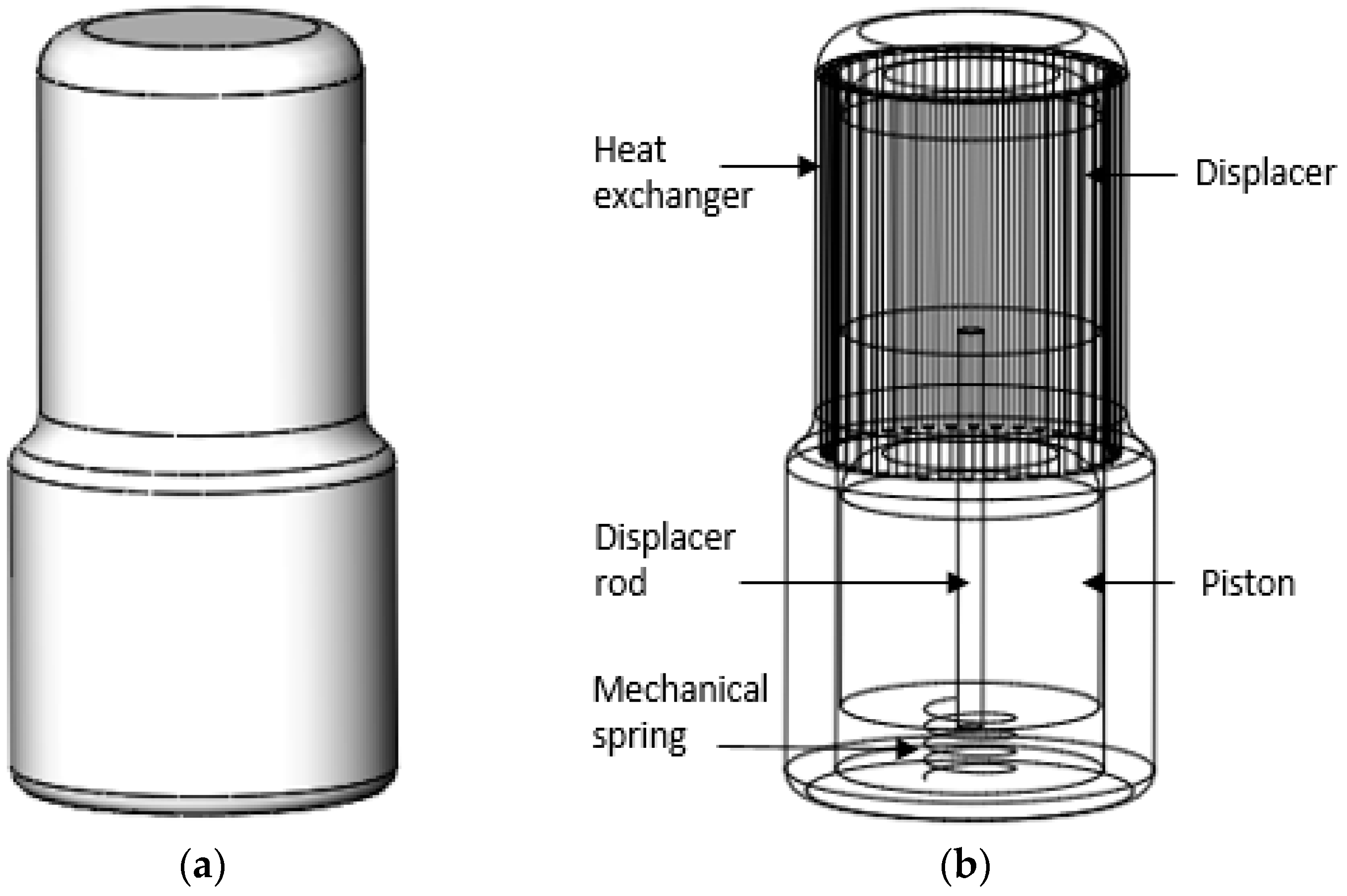
11]. The motions of the displacer and piston are determined in order to predict their amplitudes, velocities and acceleration, and they are derived with respect to the masses of the displacer and piston, the damping force, spring force, surface area and pressure of the working gas. Equation (1) is used to determine the motion of the displacer:
where
represents the mass of the displacer;
is the spring stiffness of the displacer;
is the damping load of the displacer; and
is the cross-sectional area of the displacer. The motion of the piston is defined as a result of the damping force, spring force, area of piston, bounce space pressure and the pressure of the working gas, according to Equation (2):
where
represents the mass of the piston;
is the spring stiffness of the piston;
is the damping load of the piston;
is the cross-sectional area of the piston; and
is the bounce space pressure in the piston compartment. From the ideal gas equation, the equation for pressure in the engine for closed-cycle operation is defined (Equation(3)) [
31]:
Boundary conditions for the conditional temperatures are determined with these constraints:
Using the engine’s geometry, the positions of the piston and displacer,
and
with the expansion and compression volumes,
Ve and
Vc, can be derived from the following equations:
The gas temperature derivatives in the expansion and compression spaces are:
The temperatue of the working gas across the boundary between the heater and the expansion space is determined in Equations (10) and (11):
The temperature of the mass flow from the tenth part of the regenerator to the heater is described as follows:
If:
where
represents the mass flow rate from the tenth part of the regenerator to the heater (kgs
−1),
the temperature of the mass flow rate from the tenth part of the regenerator to the heater, and
the temperature of the tenth part of the regenerator space to the heater.
The temperature of the working gas in the regenerator is obtained with Equation (14):
and represent the working gas temperature of the and parts of the regenerator space, where is the number of regenerator parts, from one to ten.
The conditions for mass flow rate from the cooler to the first part of the regenerator are obtained as follows:
If:
where
represents the mass flow from the cooler to the first part of the regenerator (kgs
−1);
is the temperature from the cooler to the first part of the regenerator;
is the temperature of the cooler space; and
is the temperature between the first part of the regenerator and the cooler.
For the compression space to the cooler, the conditions for mass flow rate are given as follows:
If:
where
represents the mass flow rate from the compression space to the cooler;
is the temperature from the compression space to the cooler;
is the temperature of the compression space;
represents mass flow rate from heater to expansion space (kgs
−1);
is the temperature of the mass flow from the heater to the expansion space;
is the temperature of the heater; and
is the temperature of the expansion space.
The equation used to determine the heat loss from conduction in the heat exchanger is given as:
where
is the thermal conductivity;
is the cross-sectional area; and
is the length.
are used to determine the temperature difference between the heat exchangers.
The transfer of heat from the first part of the regenerator to the tenth part due to heat conduction in relation to the environment is defined as external conduction heat loss. It also accounts for the heat transfer from the part of the regenerator with a higher temperature to the part with a lower temperature. This is defined only for the regenerator:
where
is the free surface area,
is the effectiveness of the regenerator, and
are used to determine the temperature of the regenerator matrix and the regenerator part, respectively.
The work done (
W) in the cycle is determined with Equation (21):
Hence, the power output (
P) is derived as a function of work done and frequency:












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}