Secondary Frequency Stochastic Optimal Control in Independent Microgrids with Virtual Synchronous Generator-Controlled Energy Storage Systems




Abstract
1. Introduction
- (1)
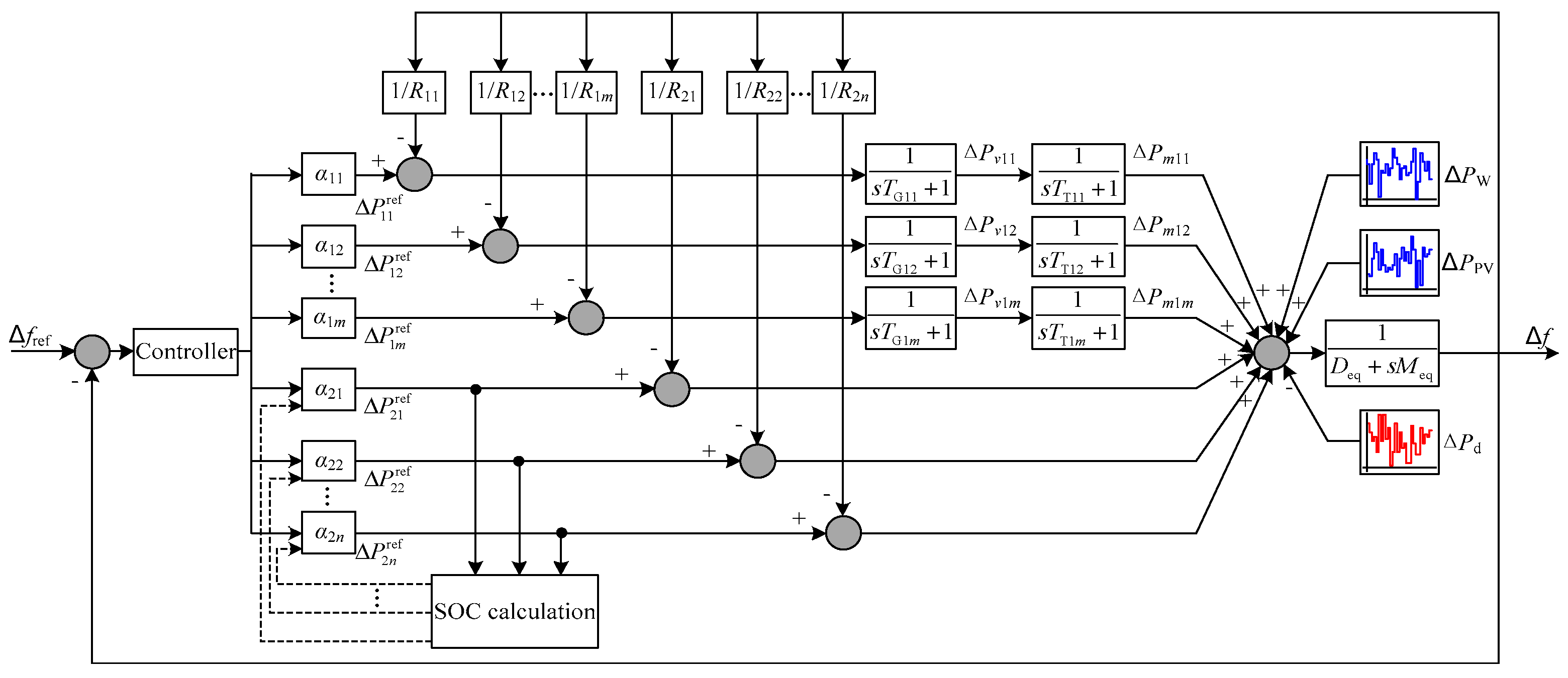
- To solve the independent MG system uncertainty problem—resulting from the power fluctuation of renewables, load disturbance, and measurement noise—an uncertain state-space model for secondary frequency regulation with VSG-controlled ESSs and traditional synchronous generators is established. In the model, a participation factor dynamic configuration method for secondary frequency regulation based on the battery’s state of charge (SOC) is proposed to optimally control the ESSs, which will prevent the overcharge or overdischarge problems and prolong the ESSs’ service life.
- (2)
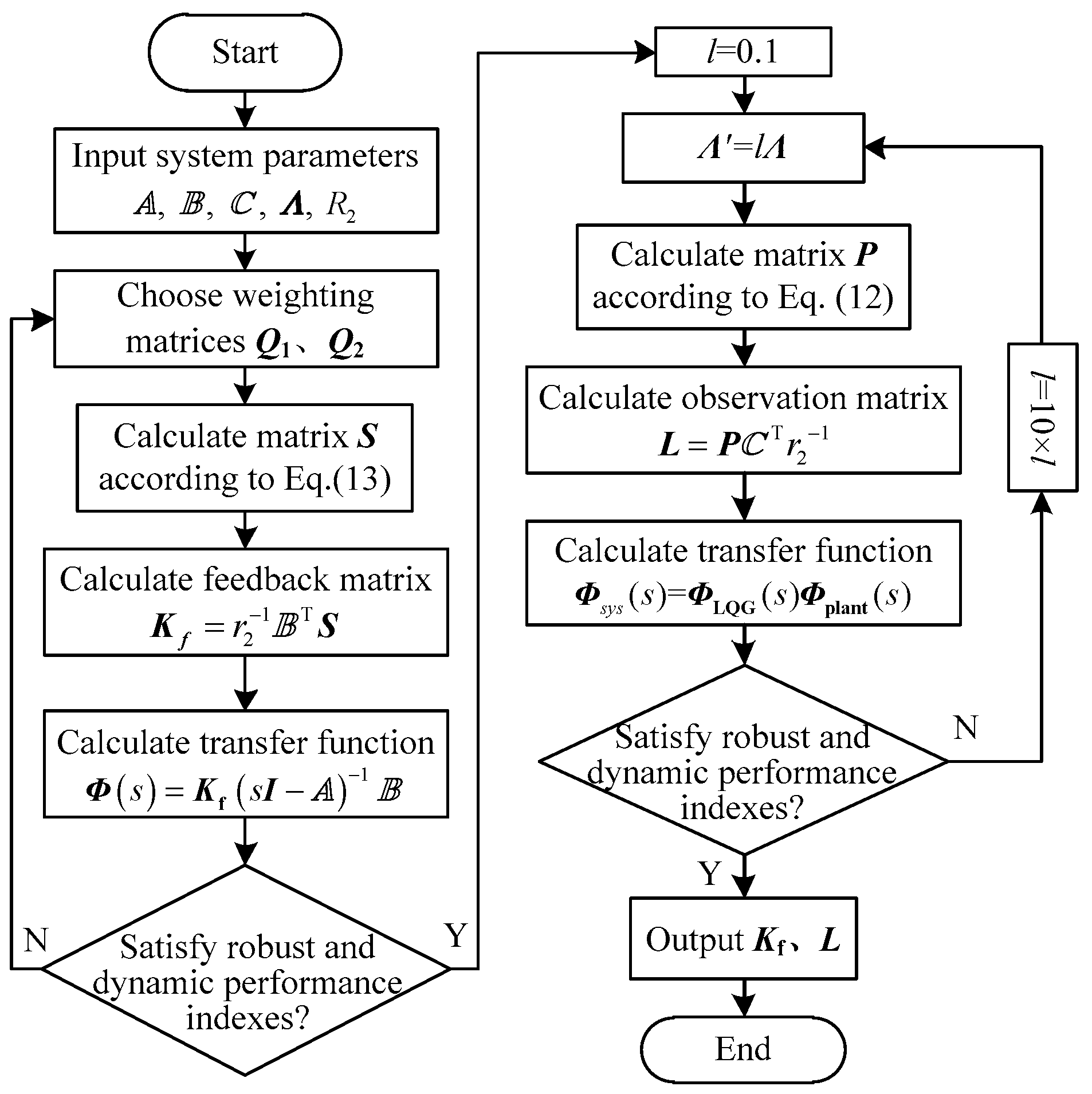
- According to the proposed uncertain state-space model for secondary frequency regulation in independent MGs, based on stochastic optimal control theory, an improved linear quadratic Gaussian (LQG) controller is designed to solve the established uncertain state-space model. In the controller design process, the weighting matrices determining the dynamic control performance are optimized by combining the loop transfer recovery (LTR) technology and distributed estimation algorithm. Compared with the PID and μ-synthesis control approaches, our proposed controller has a faster response speed and smaller overshoot, while the robustness is similar to the benchmark controllers.
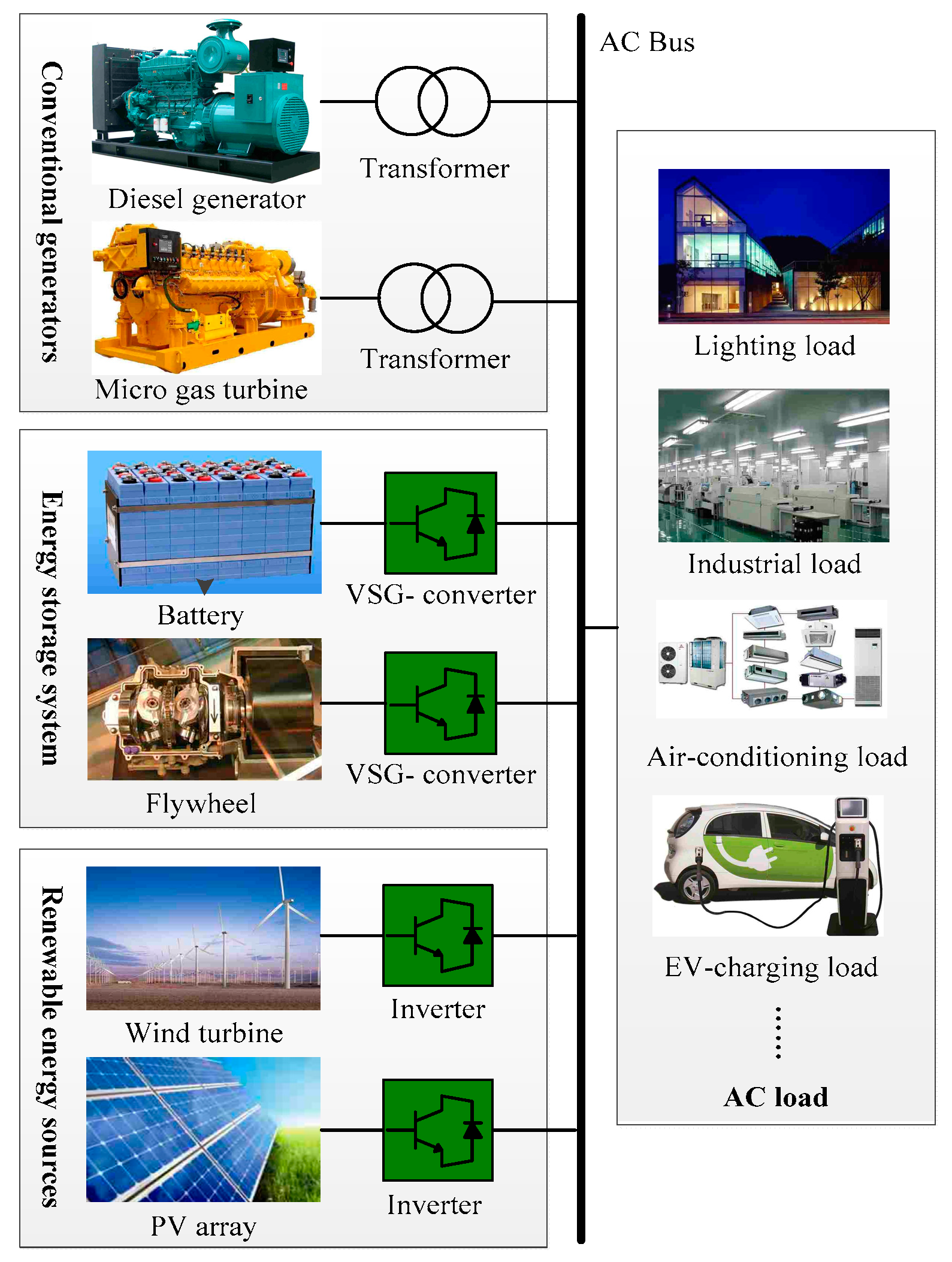
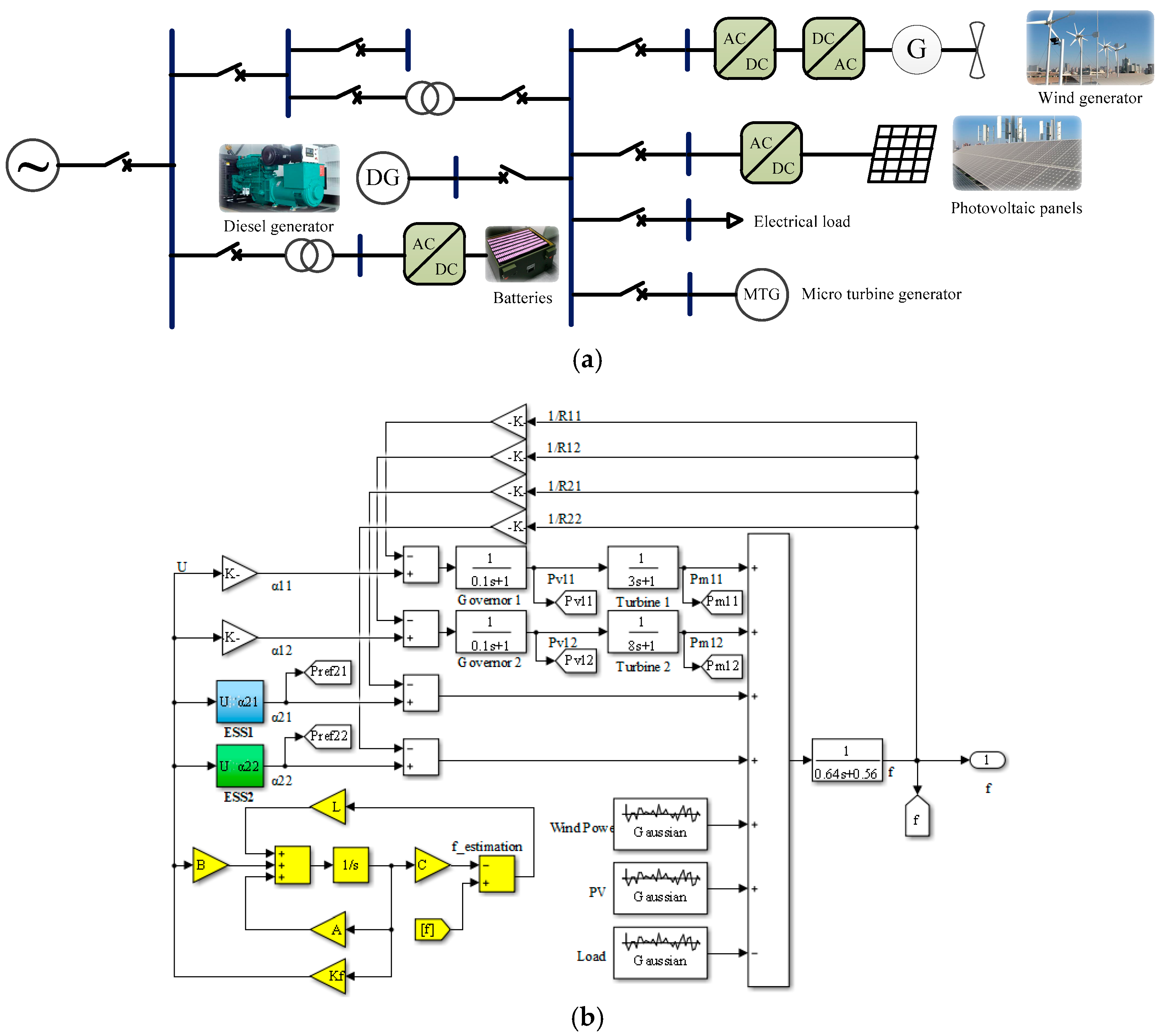
2. Frequency Regulation Modelling in Independent Microgrids
2.1. State-Space Model for Secondary Frequency Regulation of Independent Microgrid
2.1.1. Traditional Synchronous Generator
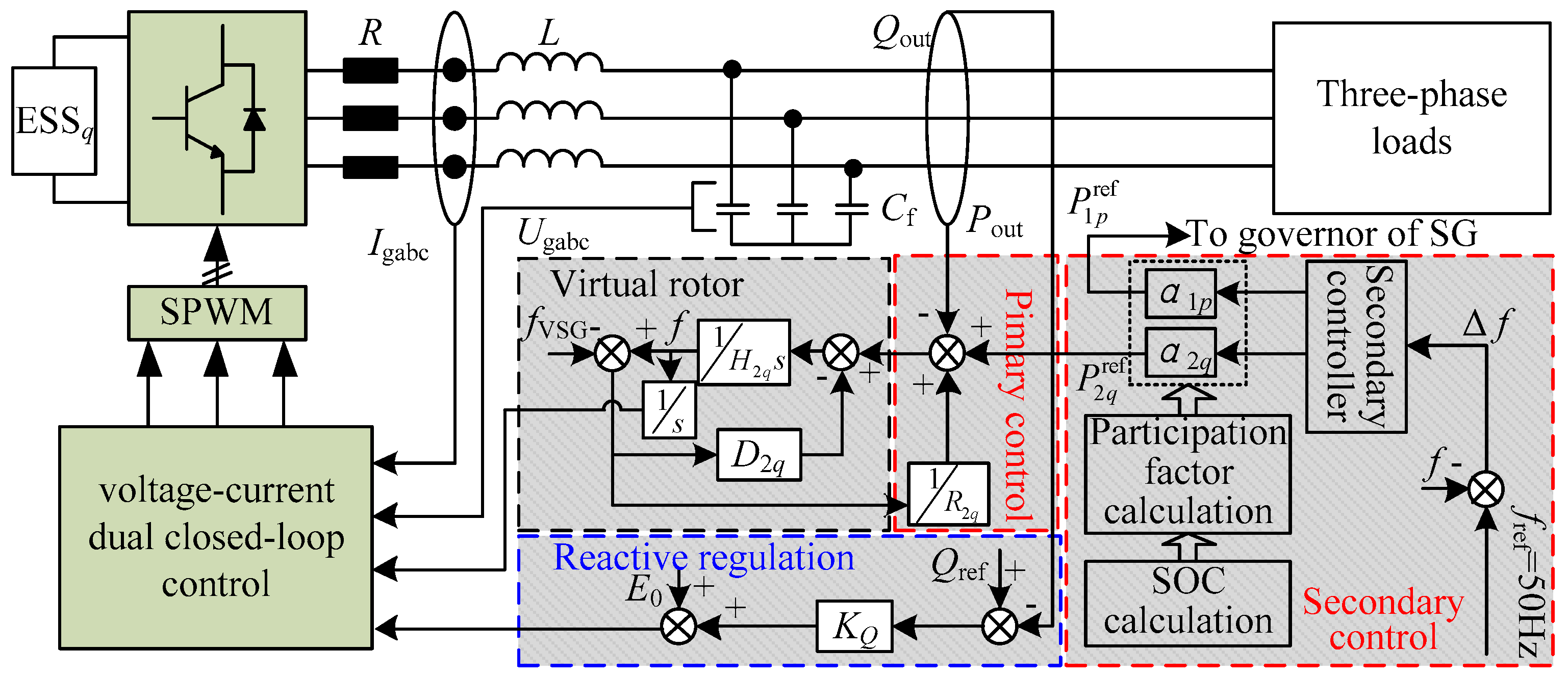
2.1.2. Virtual Synchronous Generator-Controlled Energy Storage System
2.1.3. Power Conservation Equation
2.1.4. Secondary Frequency Regulation Participation Factor Dynamic Configuration Method
2.2. Establishment of Uncertain State-Space Model of Secondary Frequency Regulation in Independent Microgrid
3. Secondary Frequency Regulation Controller Design
4. Experiment and Performance Evaluation
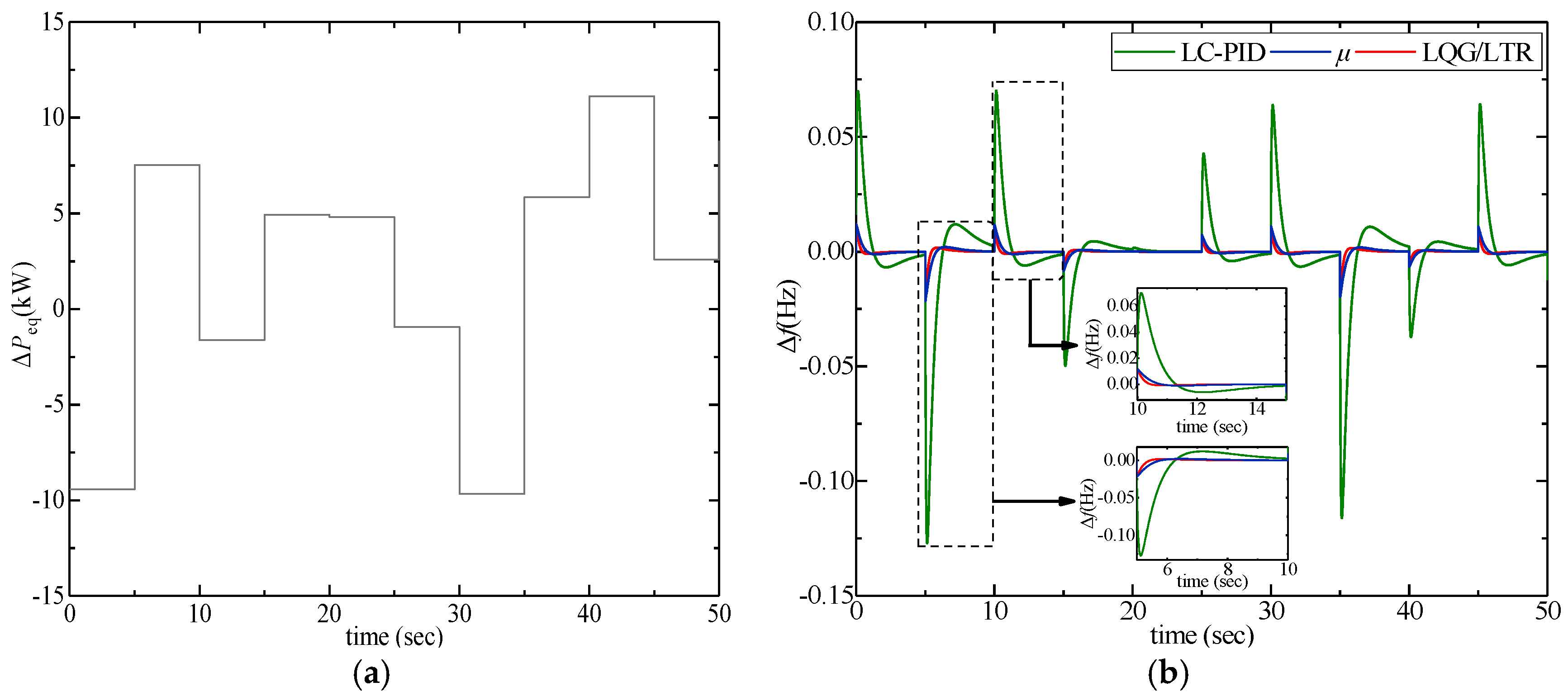
4.1. Dynamic Performance Analysis with Different Control Algorithms
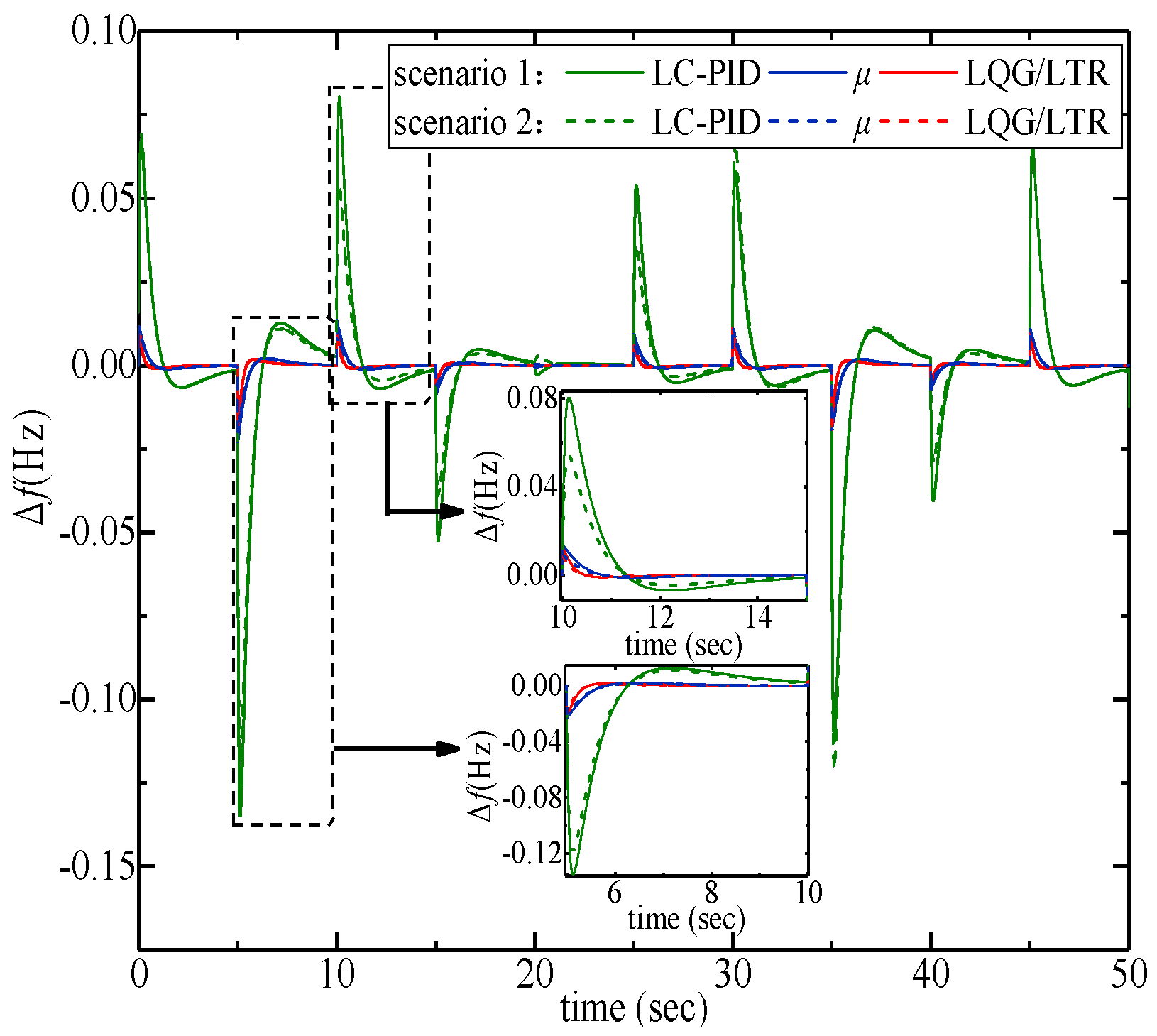
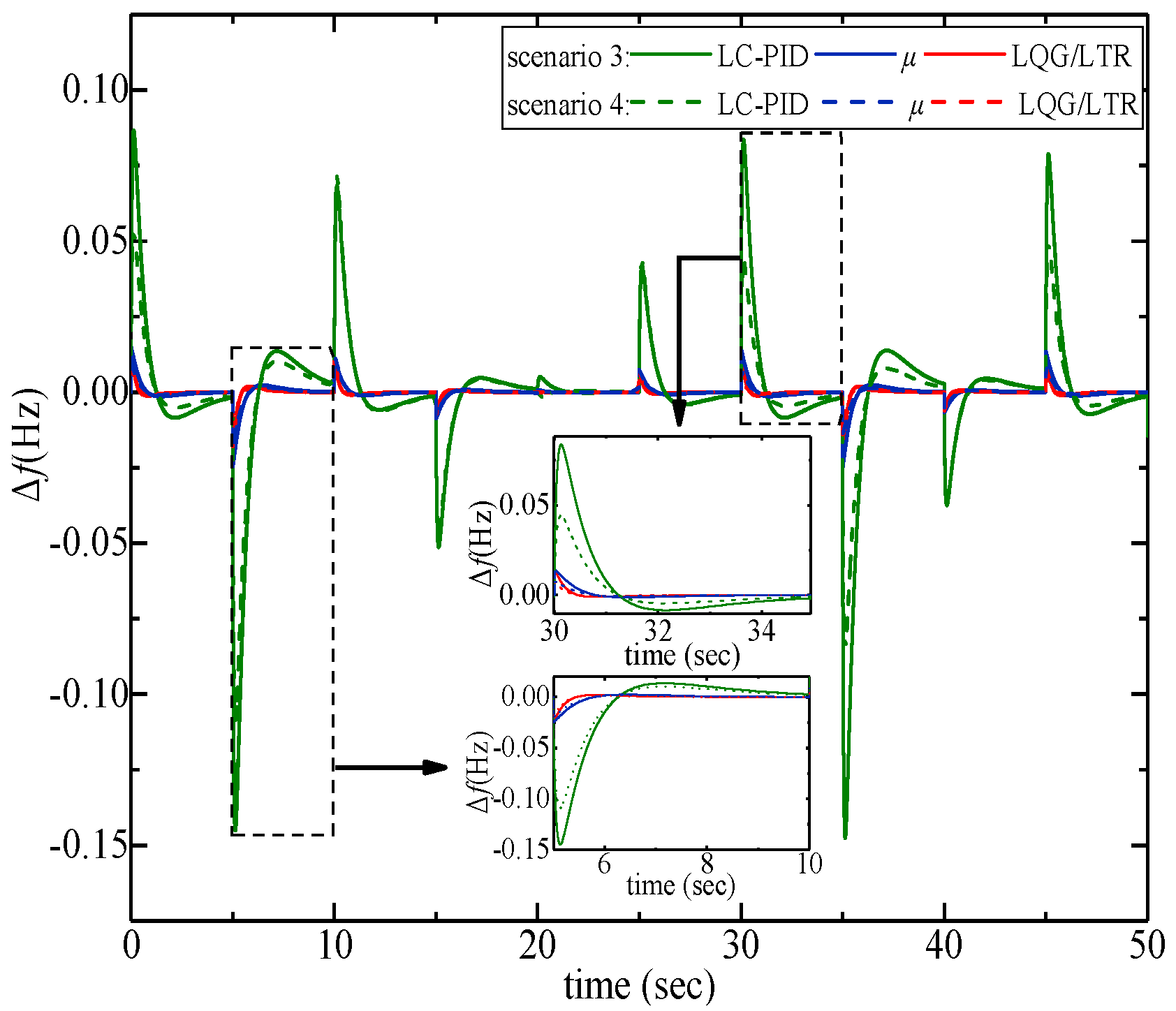
4.2. Performance Evaluation of Control Algorithms under Different Renewable and Load Power Fluctuations
4.3. Analysis of Energy Storage Units’ Operating Status with Variable Participation Factors Strategy
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hosseinzadeh, M.; Salmasi, F. Robust optimal power management system for a hybrid AC/DC micro-grid. IEEE Trans. Sustain. Energy 2015, 6, 675–687. [Google Scholar] [CrossRef]
- Fazio, A.; Russo, M.; Valeri, S.; Santis, M. Linear method for steady-state analysis of radial distribution systems. Int. J. Electr. Power Energy Syst. 2018, 99, 744–755. [Google Scholar] [CrossRef]
- Swinand, G.P.; Omahoney, A. Estimating the impact of wind generation and wind forecast errors on energy prices and costs in Ireland. Renew. Energy 2015, 75, 468–473. [Google Scholar] [CrossRef]
- Peng, C.; Xie, P.; Pan, L.; Yu, R. Flexible robust optimization dispatch for hybrid wind/photovoltaic/hydro/thermal power system. IEEE Trans. Smart Grid 2016, 7, 751–762. [Google Scholar] [CrossRef]
- Vachirasricirikul, S.; Ngamroo, I. Robust LFC in a smart grid with wind power penetration by coordinated V2G control and frequency controller. IEEE Trans. Smart Grid 2014, 5, 371–380. [Google Scholar] [CrossRef]
- Fini, M.H.; Golshan, M.E.H. Determining optimal virtual inertia and frequency control parameters to preserve the frequency stability in islanded microgrids with high penetration of renewables. Electr. Power Syst. Res. 2018, 154, 13–22. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, Y.; Zhou, L.; Luo, A.; Gueerrero, J.; Wu, W.; Yang, L.; Tan, W. Power coordinated control method with frequency support capability for hybrid single/three-phase microgrid. IET Gener. Transm. Distrib. 2018, 12, 2397–2405. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Morel, J.; Bevrani, H.; Hiyama, T. Model predictive based load frequency control design concerning wind turbines. Int. J. Electr. Power Energy Syst. 2012, 43, 859–867. [Google Scholar] [CrossRef]
- Rezaei, N.; Kalantar, M. Economic–environmental hierarchical frequency management of a droop-controlled islanded microgrid. Energy Convers. Manag. 2014, 88, 498–515. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F. Fault-tolerant supervisor controller for a hybrid AC/DC micro-grid. IEEE Trans. Smart Grid 2018, 9, 2809–2823. [Google Scholar] [CrossRef]
- Lai, J.; Zhou, H.; Lu, X.; Yu, X.; Hu, W. Droop-based distributed cooperative control for microgrids with time-varying delays. IEEE Trans. Smart Grid 2016, 7, 1775–1789. [Google Scholar] [CrossRef]
- Fathi, A.; Shafiee, Q.; Bevrani, H. Robust frequency control of microgrids using an extended virtual synchronous generator. IEEE Trans. Power Syst. 2018. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Bevrani, H.; Ise, T. Enhanced virtual synchronous generator control for parallel inverters in microgrids. IEEE Trans. Smart Grid 2016, 8, 2268–2277. [Google Scholar] [CrossRef]
- Ma, Y.; Cao, W.; Yang, L.; Wang, F.; Tolbert, L.M. Virtual synchronous generator control of full converter wind turbines with short term energy storage. IEEE Trans. Ind. Electron. 2017, 64, 8821–8831. [Google Scholar] [CrossRef]
- Liu, W.; Gu, W.; Sheng, W.; Meng, X.; Wu, Z.; Chen, W. Decentralized multi-agent system-based cooperative frequency control for autonomous microgrids with communication constraints. IEEE Trans. Sustain. Energy 2017, 5, 446–456. [Google Scholar] [CrossRef]
- Liu, S.; Wang, X.; Liu, P.X. Impact of communication delays on secondary frequency control in an islanded microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2021–2031. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Canizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Kim, Y.J.; Del-Rosario-Calaf, G.; Norford, L.K. Analysis and experimental implementation of grid frequency regulation using behind-the-meter batteries compensating for fast load demand variations. IEEE Trans. Power Syst. 2017, 32, 484–498. [Google Scholar] [CrossRef]
- Mi, Y.; Fu, Y.; Li, D.; Wang, C.; Loh, P.C.; Wang, P. The sliding mode load frequency control for hybrid power system based on disturbance observer. Int. J. Electr. Power Energy Syst. 2016, 74, 446–452. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Blaabjerg, F.; Davari, P.; Dragicevic, T. A robust adaptive load frequency control for micro-grids. ISA Trans. 2016, 65, 220–229. [Google Scholar] [CrossRef] [PubMed]
- Vrdoljak, K.; Perić, N.; Petrović, I. Sliding mode based load-frequency control in power systems. Electr. Power Syst. Res. 2010, 80, 514–527. [Google Scholar] [CrossRef]
- Vachirasricirikul, S.; Ngamroo, I. Robust controller design of heat pump and plug-in hybrid electric vehicle for frequency control in a smart microgrid based on specified-structure mixed H2/H∞ control technique. Appl. Energy 2011, 88, 3860–3868. [Google Scholar] [CrossRef]
- Cai, L.; He, Z.; Hu, H. A new load frequency control method of multi-area power system via the viewpoints of Port-Hamiltonian system and cascade system. IEEE Trans. Power Syst. 2017, 32, 1689–1700. [Google Scholar] [CrossRef]
- Han, Y.; Young, P.M.; Jain, A.; Zimmerle, D. Robust control for microgrid frequency deviation reduction with attached storage system. IEEE Trans. Smart Grid 2015, 6, 557–565. [Google Scholar] [CrossRef]
- Babazadeh, M.; Karimi, H.; Babazadeh, M.; Karimi, H. A robust two-degree-of-freedom control strategy for an islanded microgrid. IEEE Trans. Power Deliv. 2013, 28, 1339–1347. [Google Scholar] [CrossRef]
- Hossain, M.J.; Pota, H.R.; Mahmud, M.A.; Aldeen, M. Robust control for power sharing in microgrids with low-inertia wind and PV generators. IEEE Trans. Sustain. Energy 2015, 6, 1067–1077. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust frequency control in an islanded microgrid: H∞ and μ-synthesis approaches. IEEE Trans. Smart Grid 2016, 7, 706–717. [Google Scholar] [CrossRef]
- Şerban, I.; Marinescu, C. Aggregate load-frequency control of a wind-hydro autonomous microgrid. Renew. Energy 2011, 36, 3345–3354. [Google Scholar] [CrossRef]
- Zolotas, A.C.; Chaudhuri, B.; Jaimoukha, I.M.; Korba, P. A study on LQG/LTR control for damping inter-area oscillations in power systems. IEEE Trans. Contr. Syst. Technol. 2006, 15, 151–160. [Google Scholar] [CrossRef]
- Angélico, B.A.; Toriumi, F.Y.; Barbosa, F.S.; Neves, G.D. On guaranteeing convergence of discrete LQG/LTR when augmenting it with forward PI controllers. IEEE Access 2017, 5, 27203–27210. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters of Traditional Synchronous Generators | Diesel Generator | Micro-Gas Generator |
| Time constant of speed governor TG (s) | 0.1 | 0.1 |
| Time constant of generator TT (s) | 3 | 8 |
| Droop coefficient R (Hz/pukW) | 2.5 | 2.5 |
| Rotary inertia M (pukW·s/Hz) | 0.12 | 0.15 |
| Damping coefficient D (pukW/Hz) | 0.1 | 0.05 |
| Adjustable power capacity E (kW·h) | 110 | 85 |
| Parameters of Renewable Generation Systems | Wind Power Generator | PV System |
| Baseline active output power | 50 | 30 |
| Variance of active output power fluctuation | 15 | 10 |
| Parameters of VSG-Controlled ESSs | ESS1 | ESS2 |
| Droop coefficient R (Hz/pukW) | 2.5 | 2.05 |
| Virtual rotary inertia (pukW·s/Hz) | 0.2 | 0.17 |
| Virtual damping coefficient (pukW/Hz) | 0.19 | 0.22 |
| Initial SOC value (%) | 80 | 60 |
| Constant η (%) | 95 | 95 |
| Rated active power PN (kW) | 50 | 30 |
| Adjustable capacity E (kW·h) | 36 | 20 |
| Variance | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 |
|---|---|---|---|---|
| Wind power generator | +20% | −40% | - | - |
| PV generator | +45% | −30% | - | - |
| Power load | - | - | +50% | −40% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, T.; Zhang, Y.; Wang, Z.; Pen, H. Secondary Frequency Stochastic Optimal Control in Independent Microgrids with Virtual Synchronous Generator-Controlled Energy Storage Systems. Energies 2018, 11, 2388. https://doi.org/10.3390/en11092388
Yang T, Zhang Y, Wang Z, Pen H. Secondary Frequency Stochastic Optimal Control in Independent Microgrids with Virtual Synchronous Generator-Controlled Energy Storage Systems. Energies. 2018; 11(9):2388. https://doi.org/10.3390/en11092388
Chicago/Turabian StyleYang, Ting, Yajian Zhang, Zhaoxia Wang, and Haibo Pen. 2018. "Secondary Frequency Stochastic Optimal Control in Independent Microgrids with Virtual Synchronous Generator-Controlled Energy Storage Systems" Energies 11, no. 9: 2388. https://doi.org/10.3390/en11092388
APA StyleYang, T., Zhang, Y., Wang, Z., & Pen, H. (2018). Secondary Frequency Stochastic Optimal Control in Independent Microgrids with Virtual Synchronous Generator-Controlled Energy Storage Systems. Energies, 11(9), 2388. https://doi.org/10.3390/en11092388