On Small Signal Frequency Stability under Virtual Inertia and the Role of PLLs


Abstract
:1. Introduction
2. Modeling and Analysis of PLL and Virtual Inertia in Grid
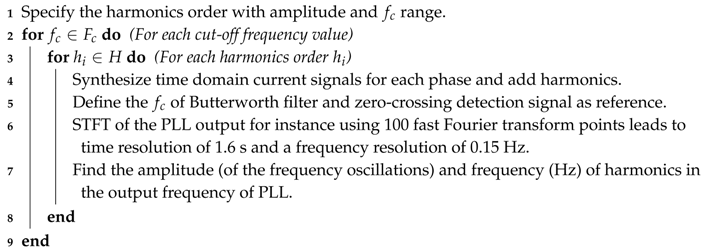
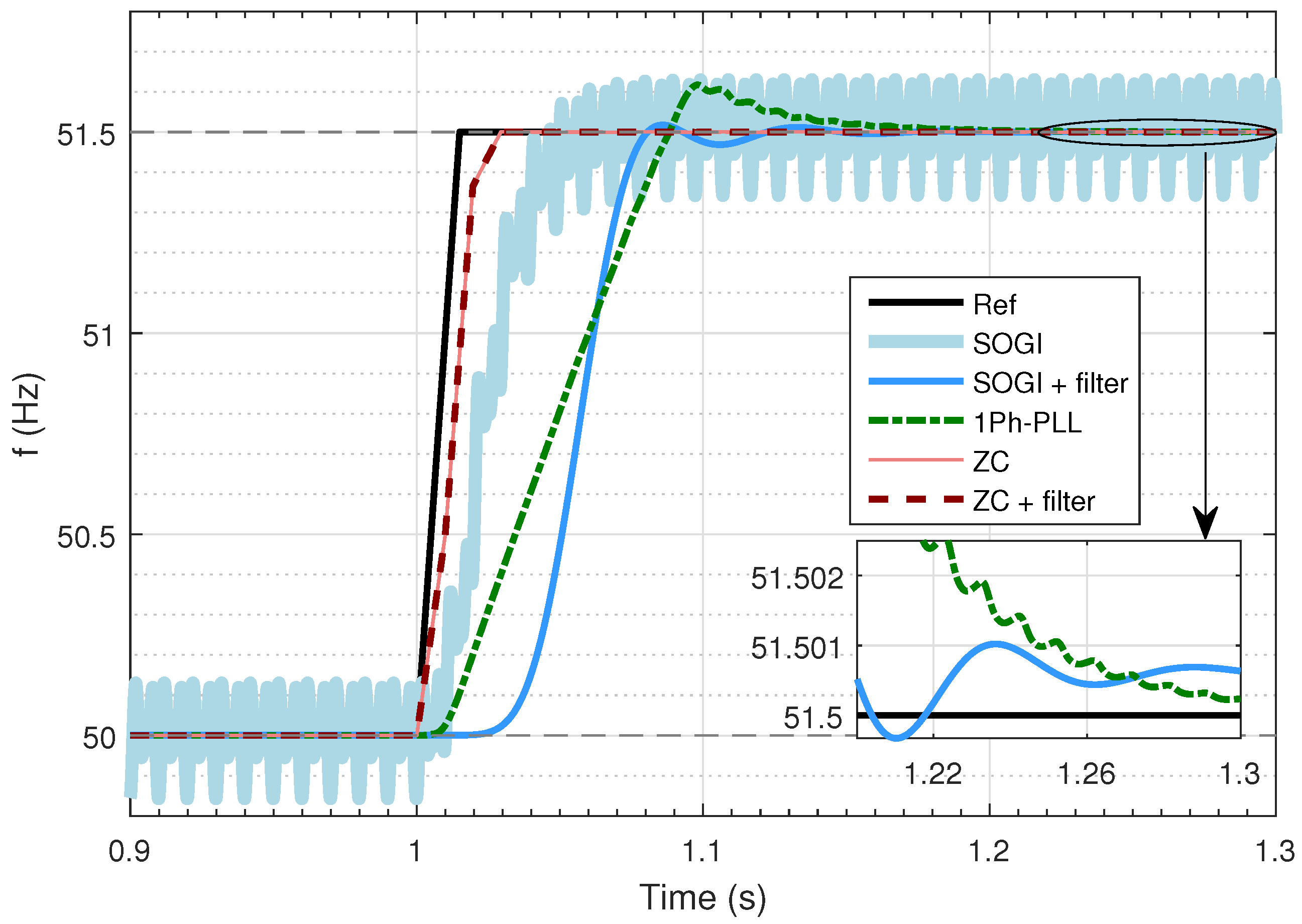
2.1. Frequency Estimation Methods
- SOGI-FLL introducing a control loop to auto-adapt the center frequency of SOGI to the input frequency [28]. It operates on the single phase voltage signal.
- SOGI-FLL with a sixth order low-pass Butterworth filter at its output.
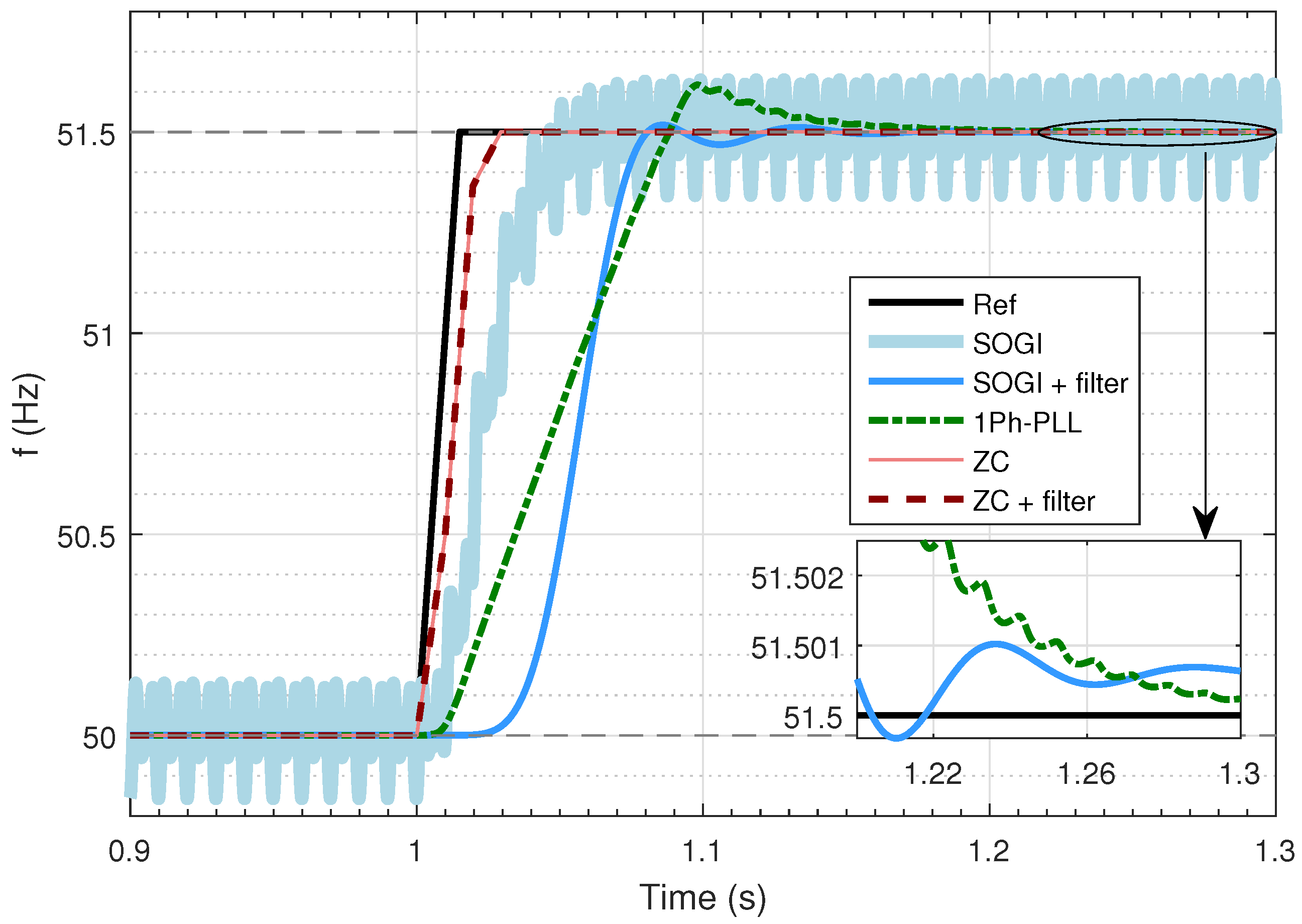
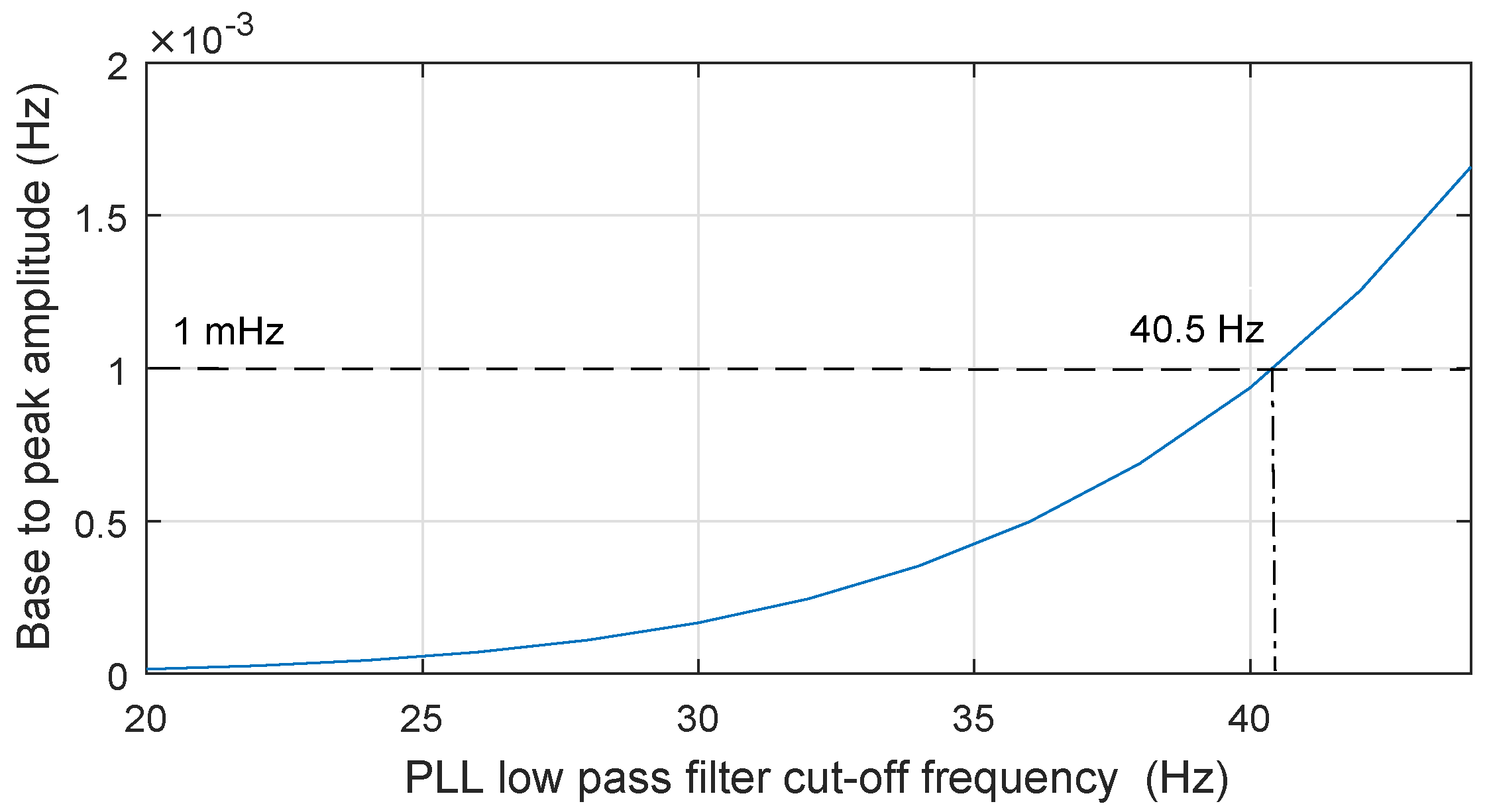
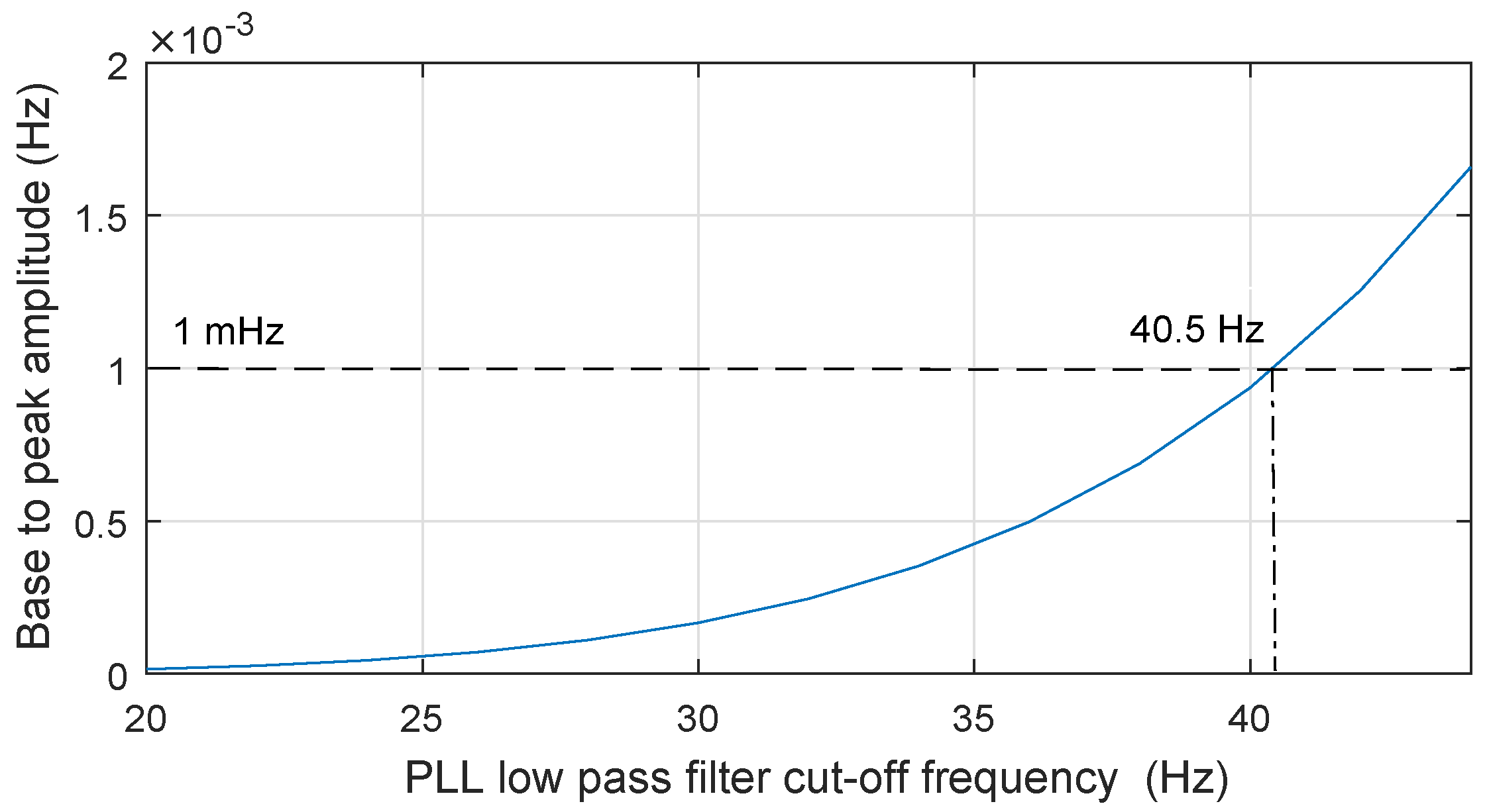
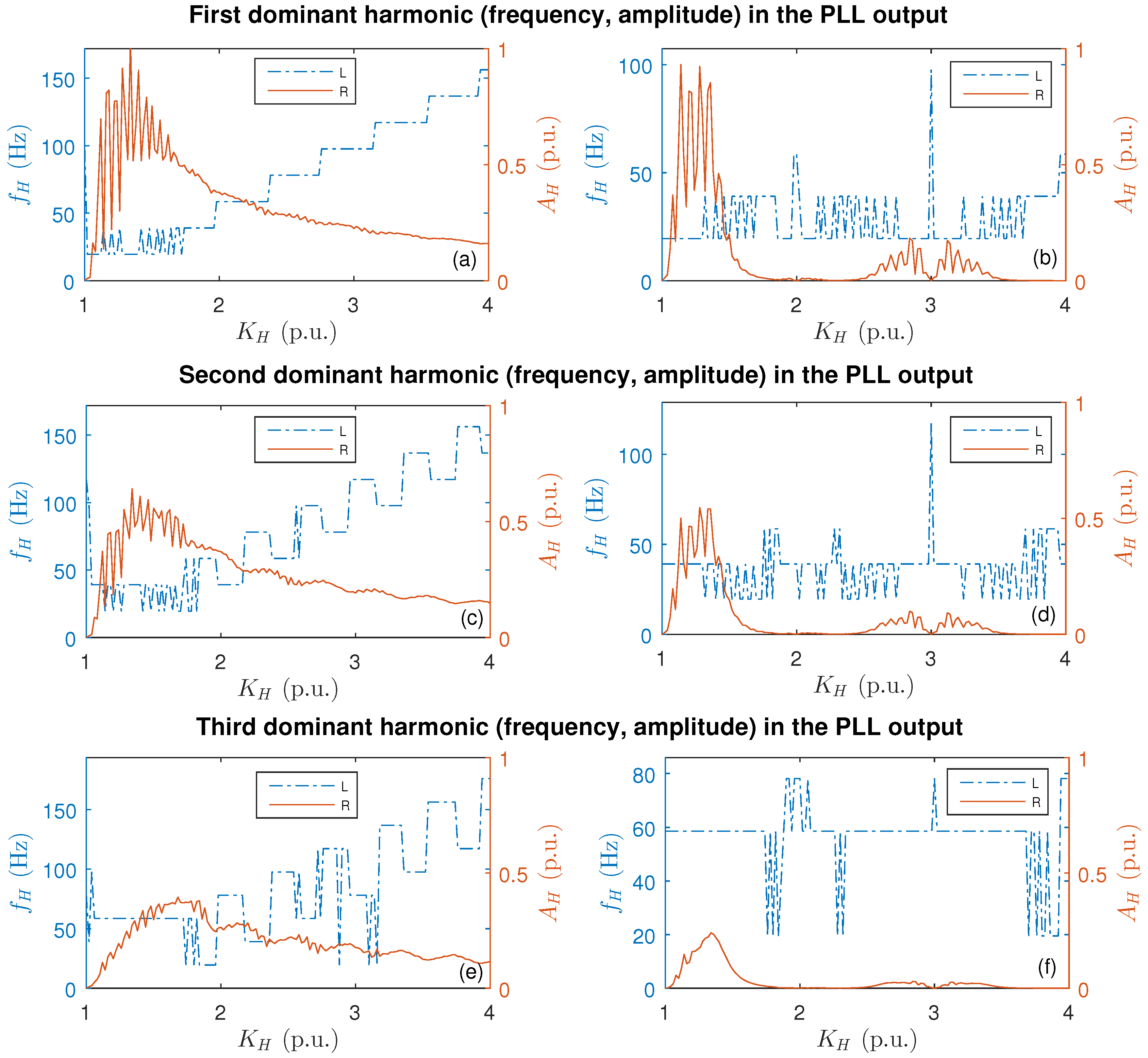
2.2. Impact of the PLL Cut-Off Frequency on the Robustness against Harmonics
| Algorithm 1: Algorithm for PLL performance analysis considering harmonics. |
 |
2.3. Virtual Inertia from VSG and Small Signal Stability Model
2.3.1. Frequency Dependent Load Model
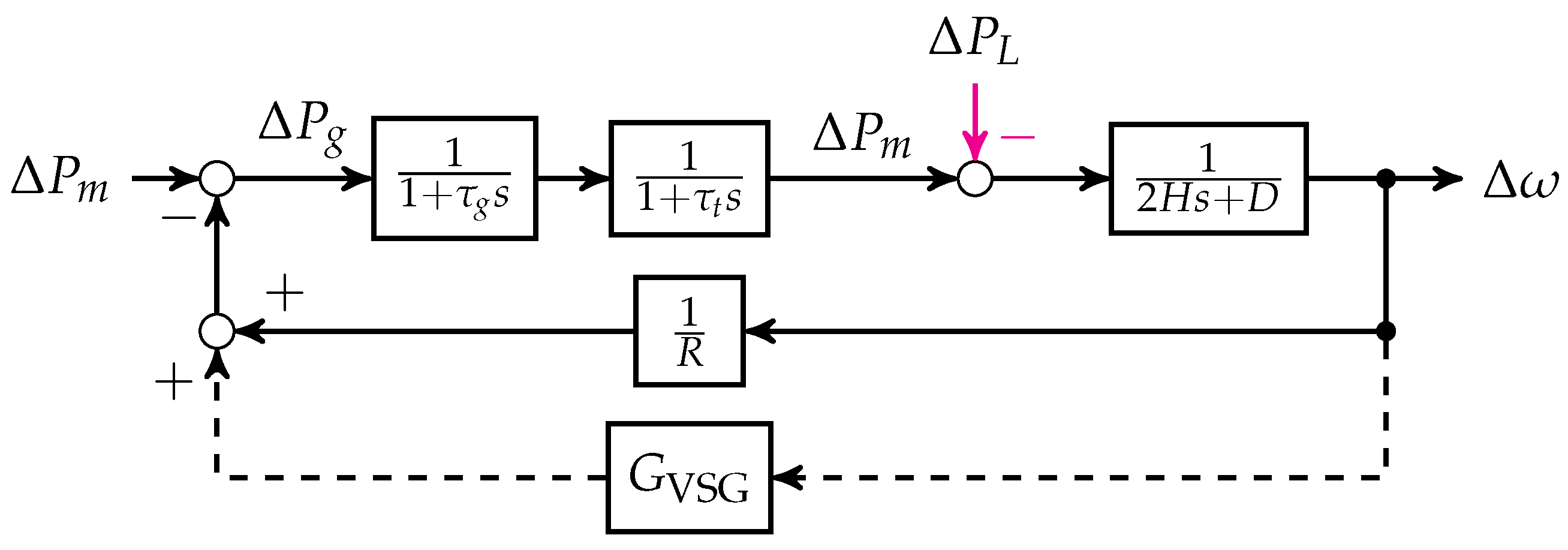
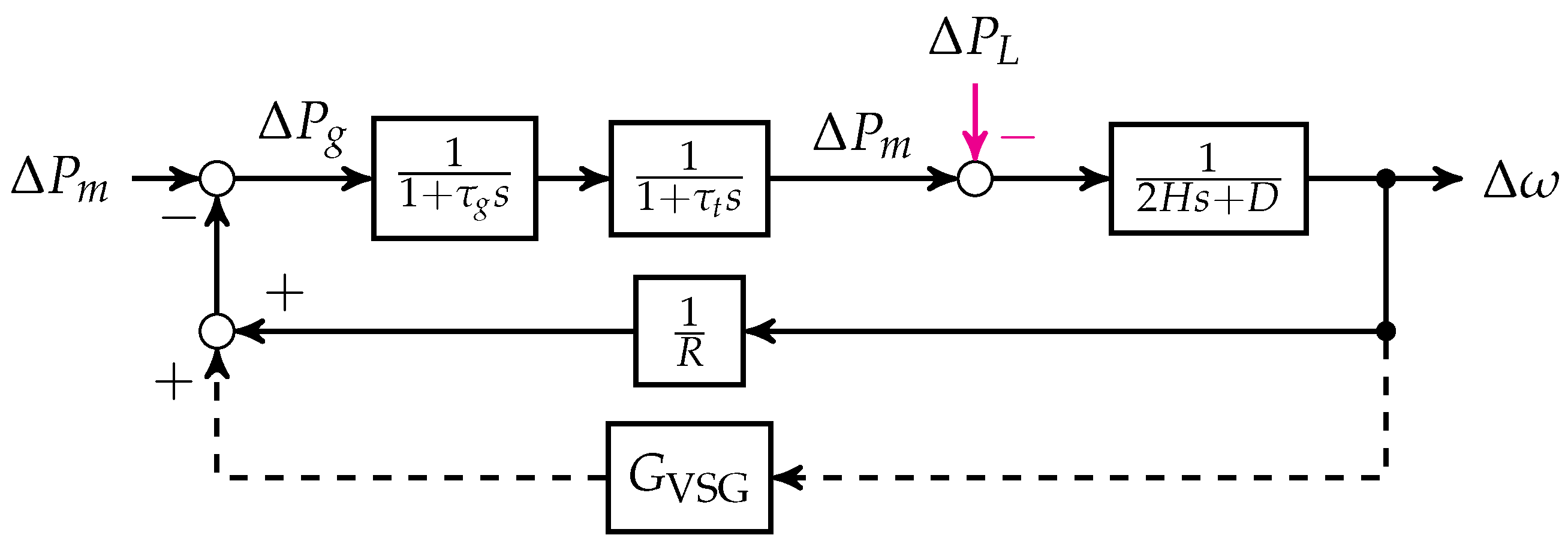
2.3.2. Frequency Domain Model of Power Grid
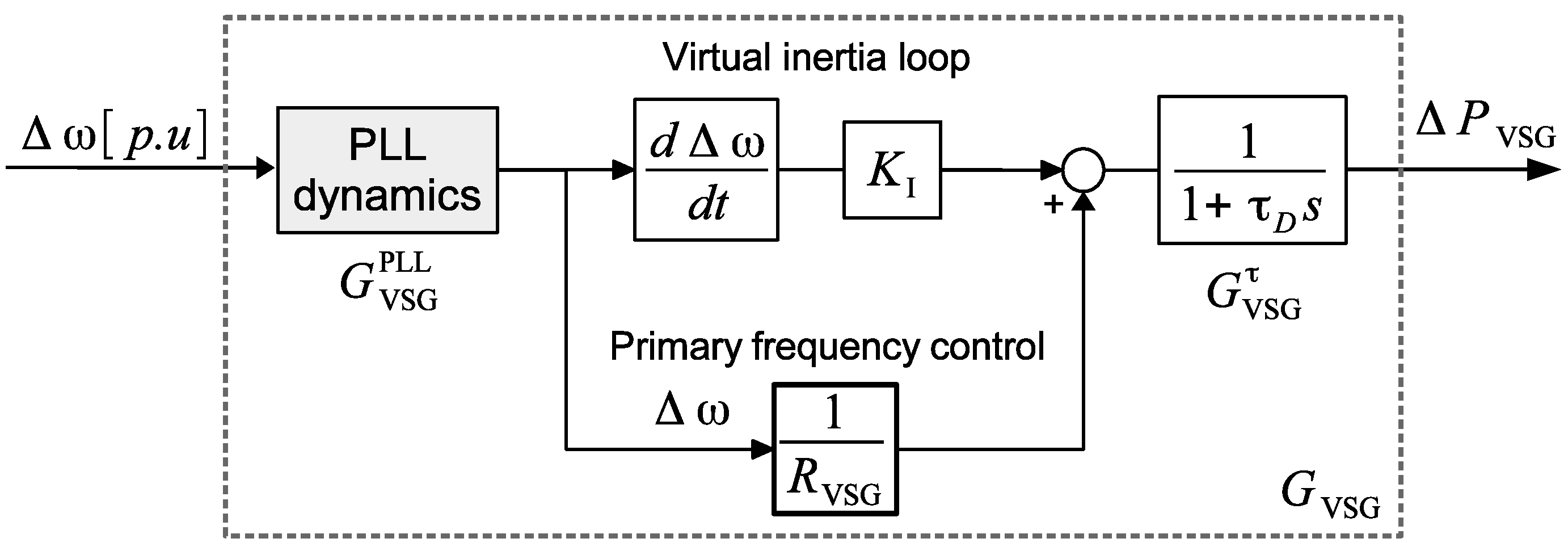
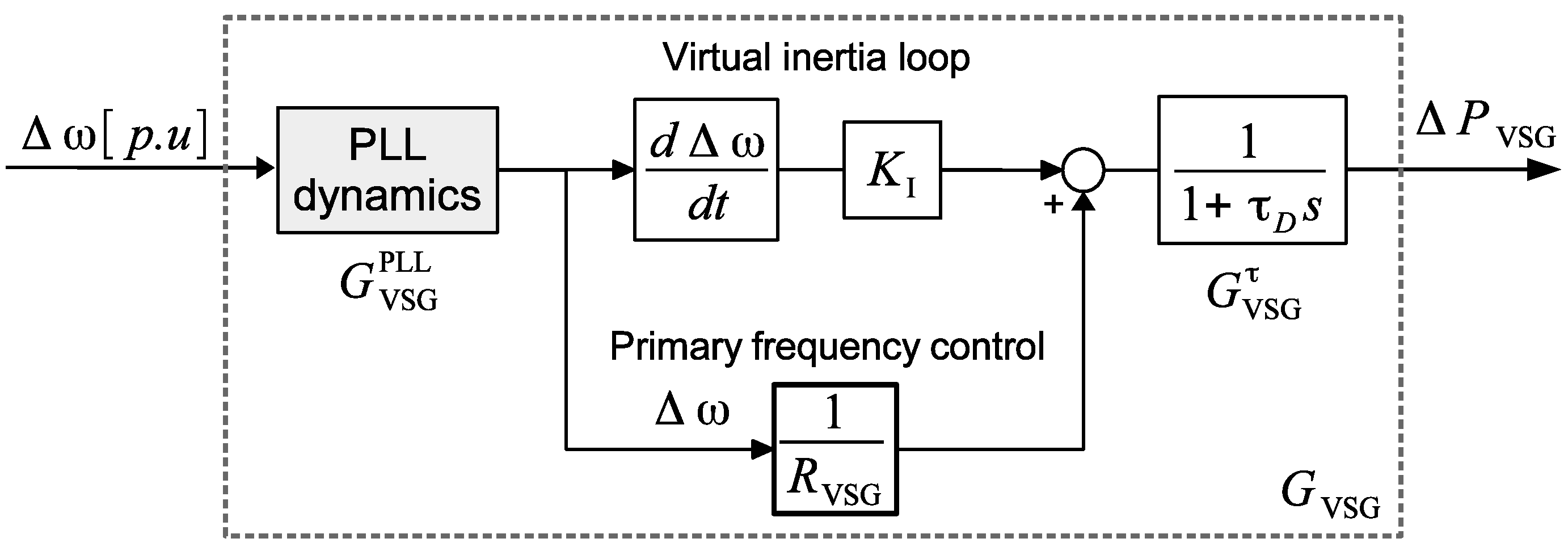
2.3.3. Frequency Domain Model of Virtual Inertia and Primary Response from VSG
3. Use Cases and Results
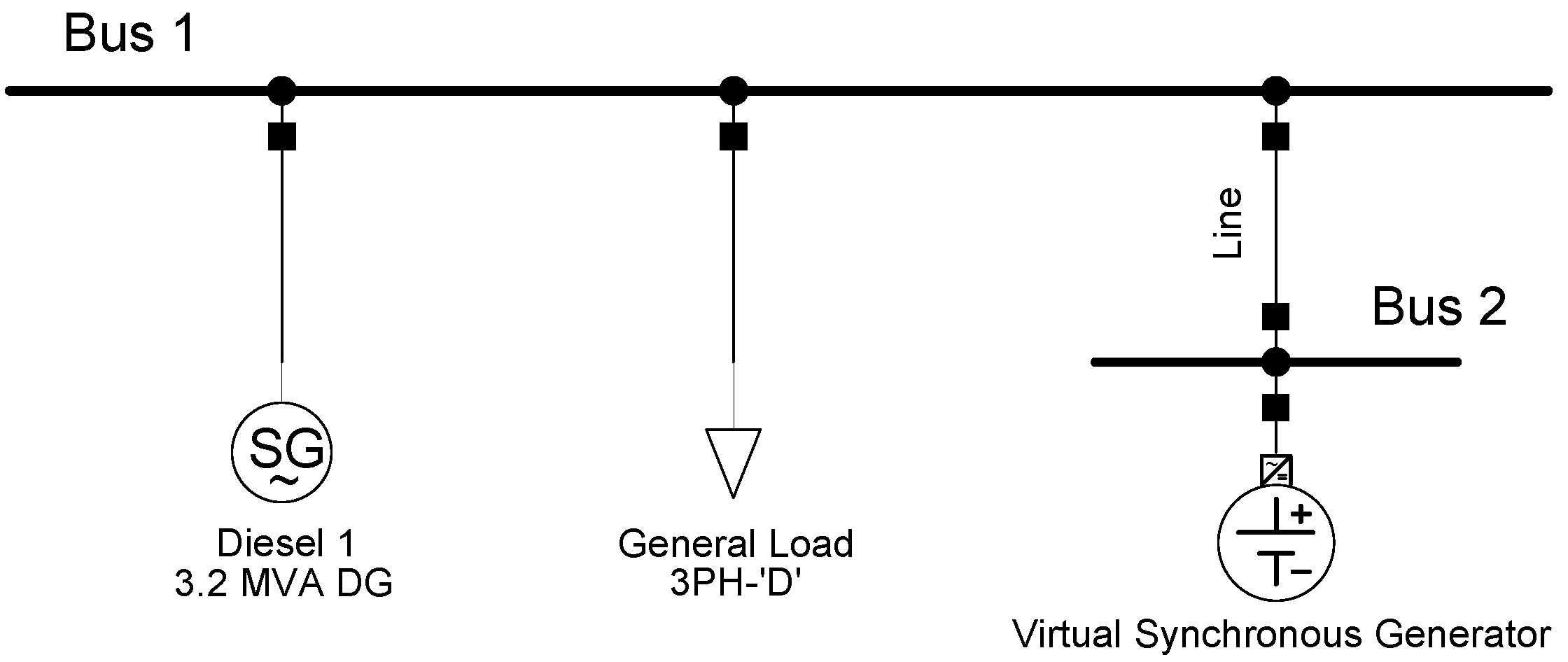
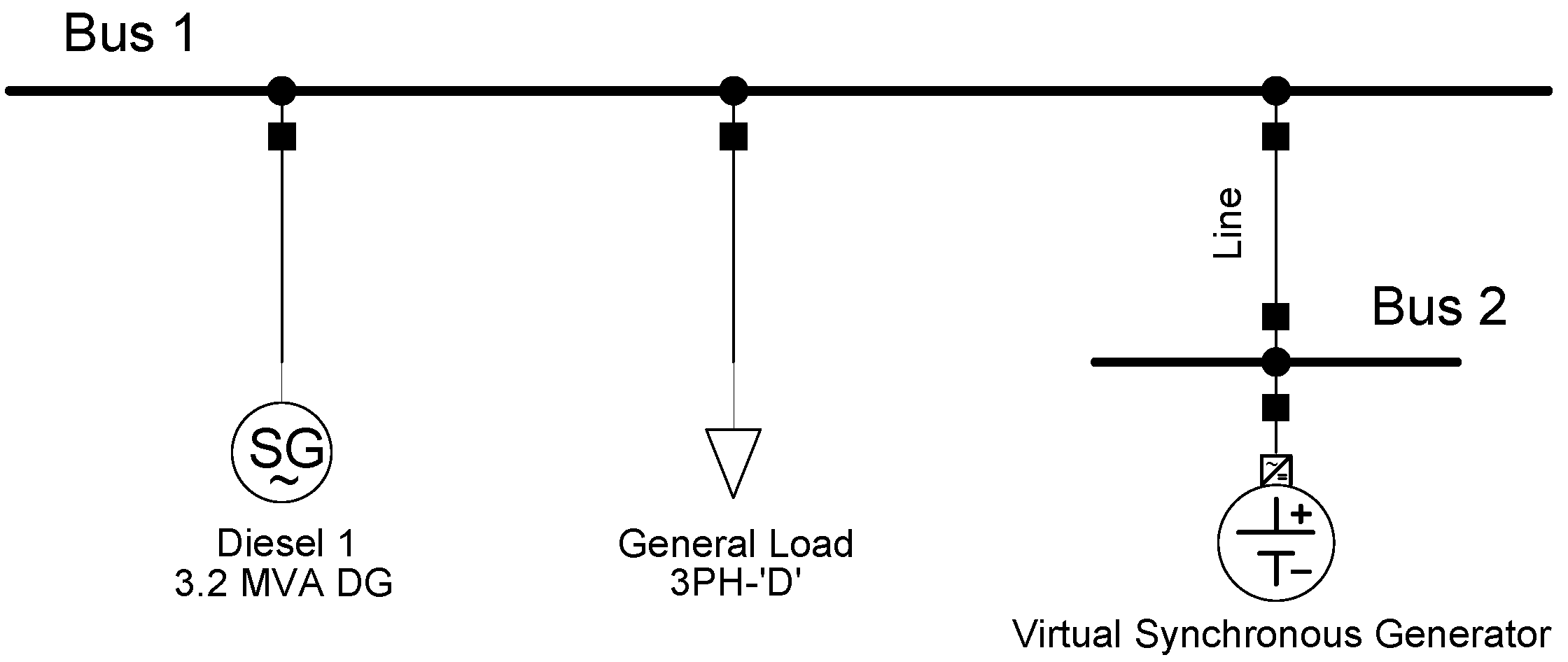
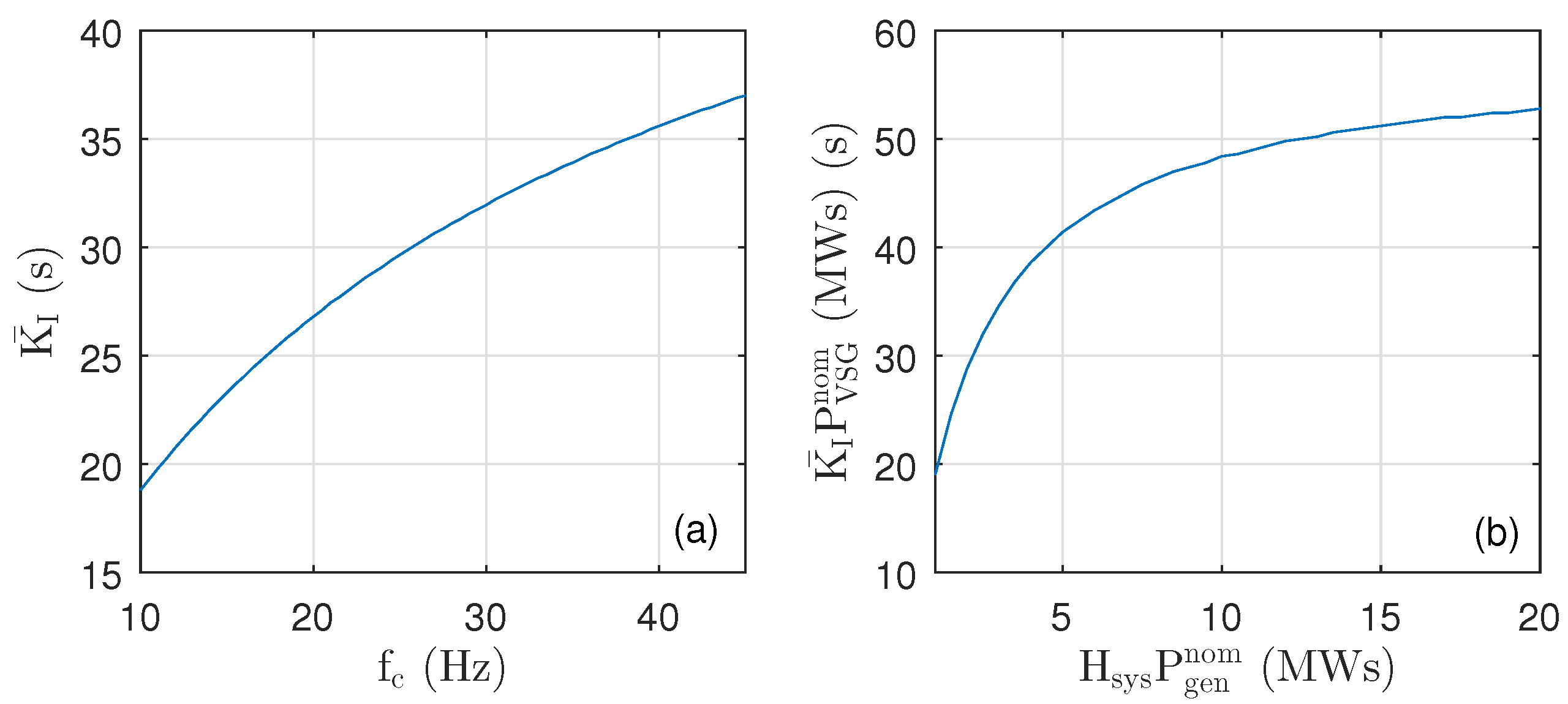
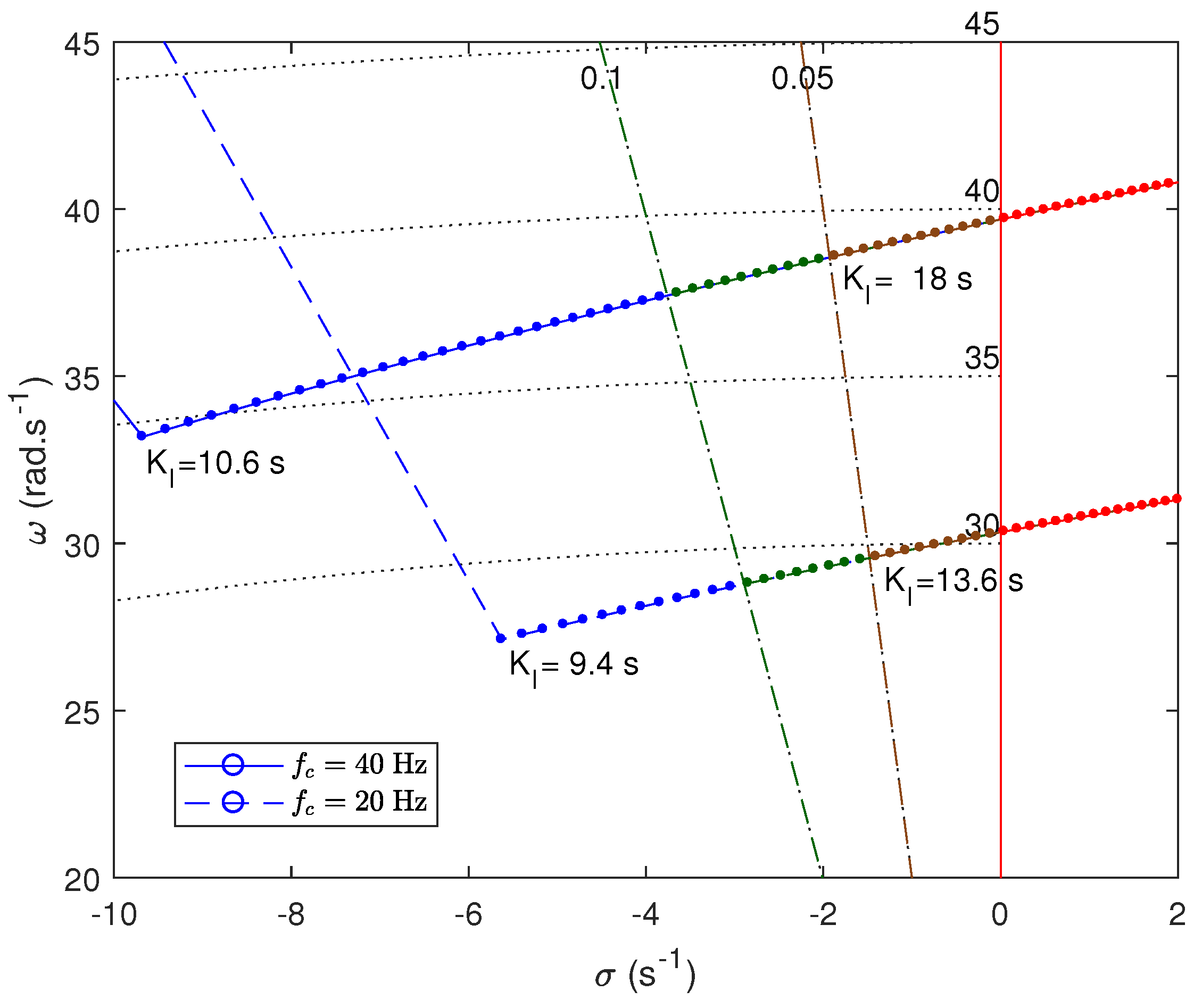
3.1. Single Machine Single Inverter Bus System
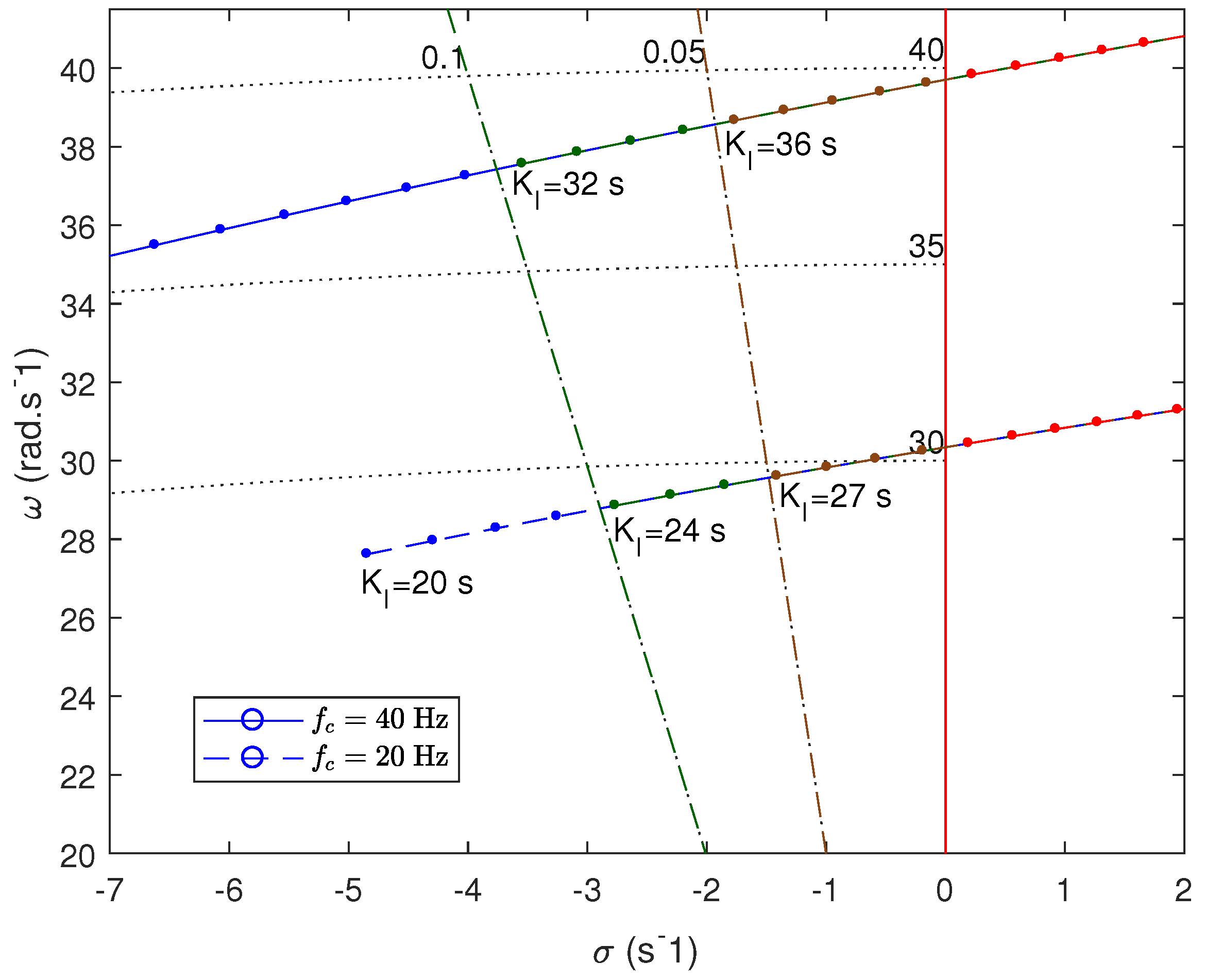
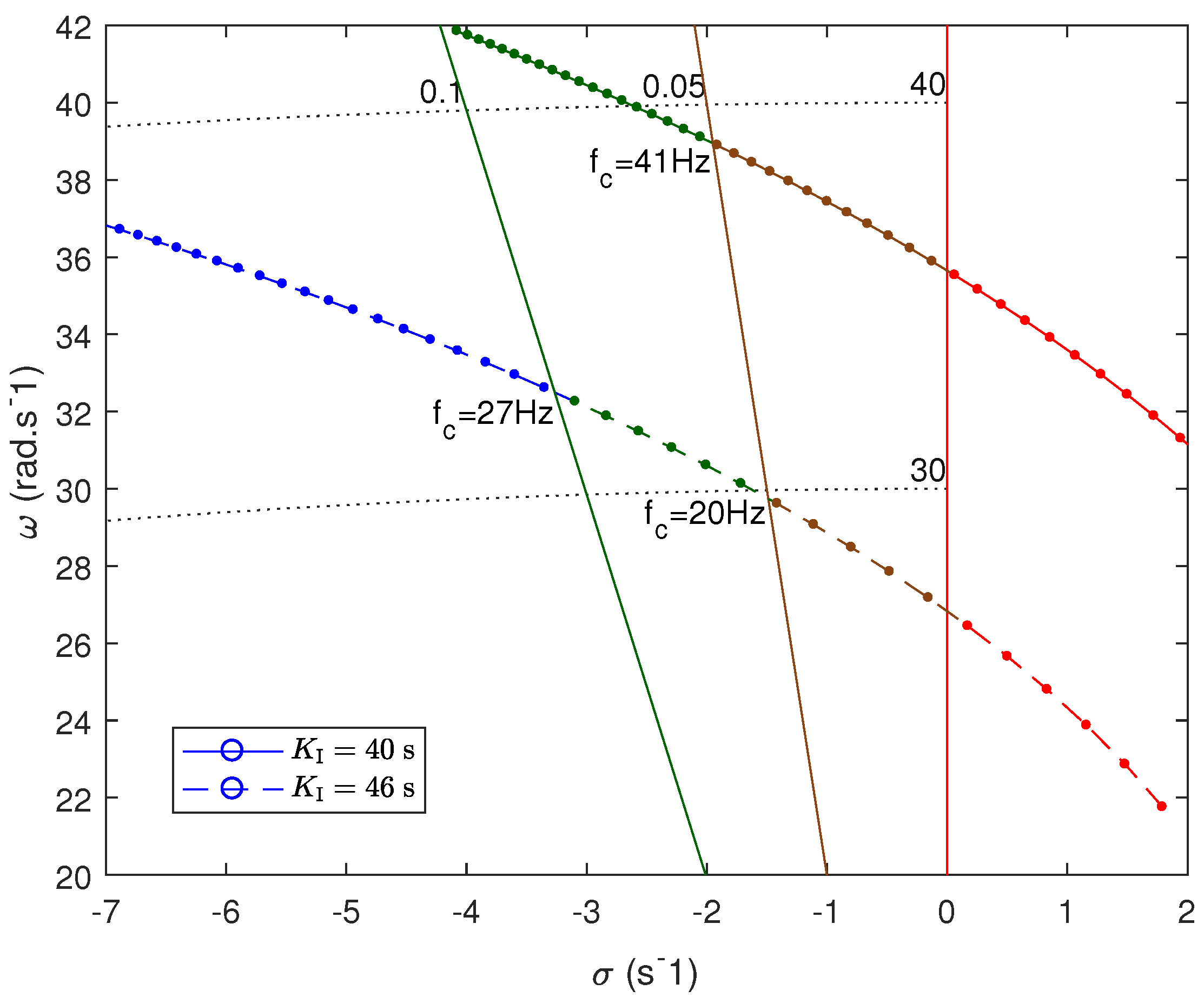
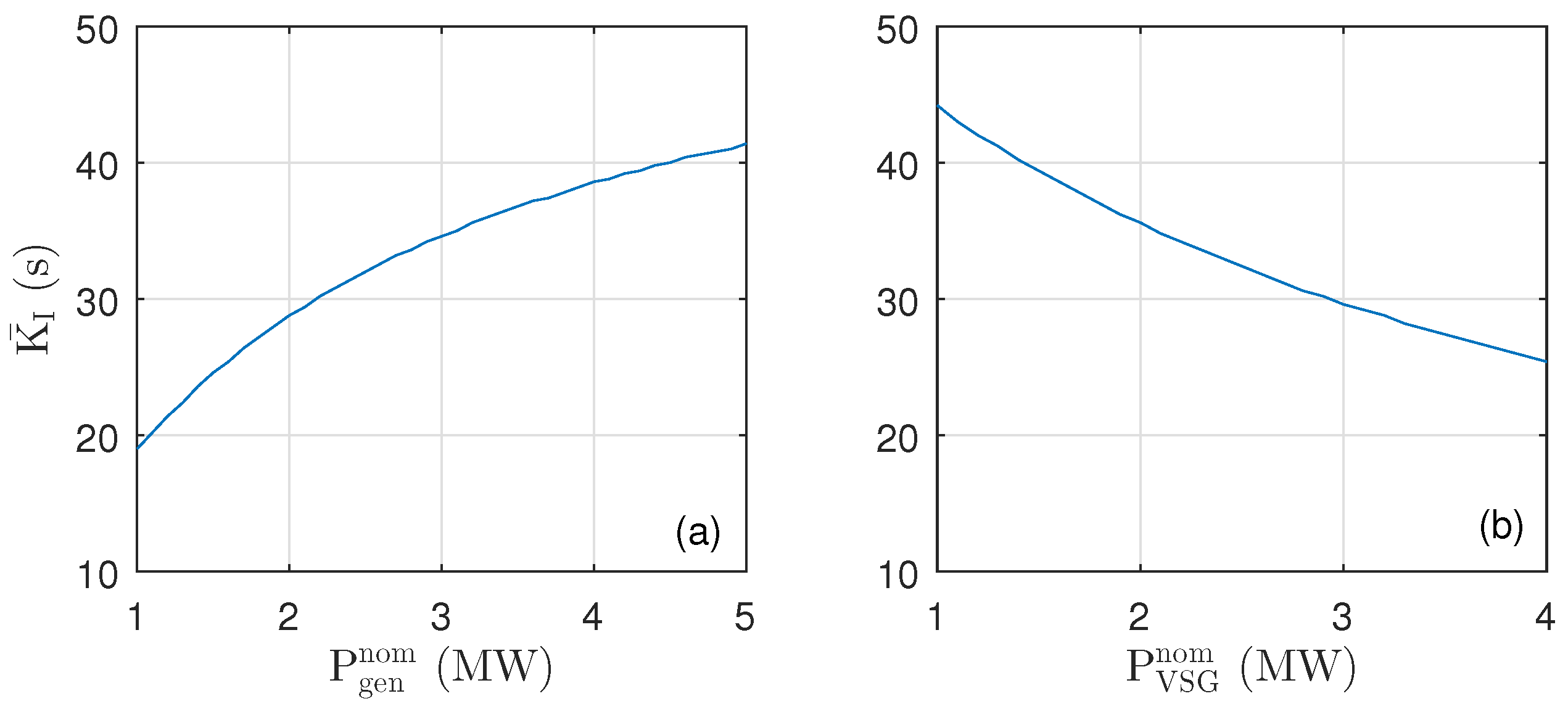
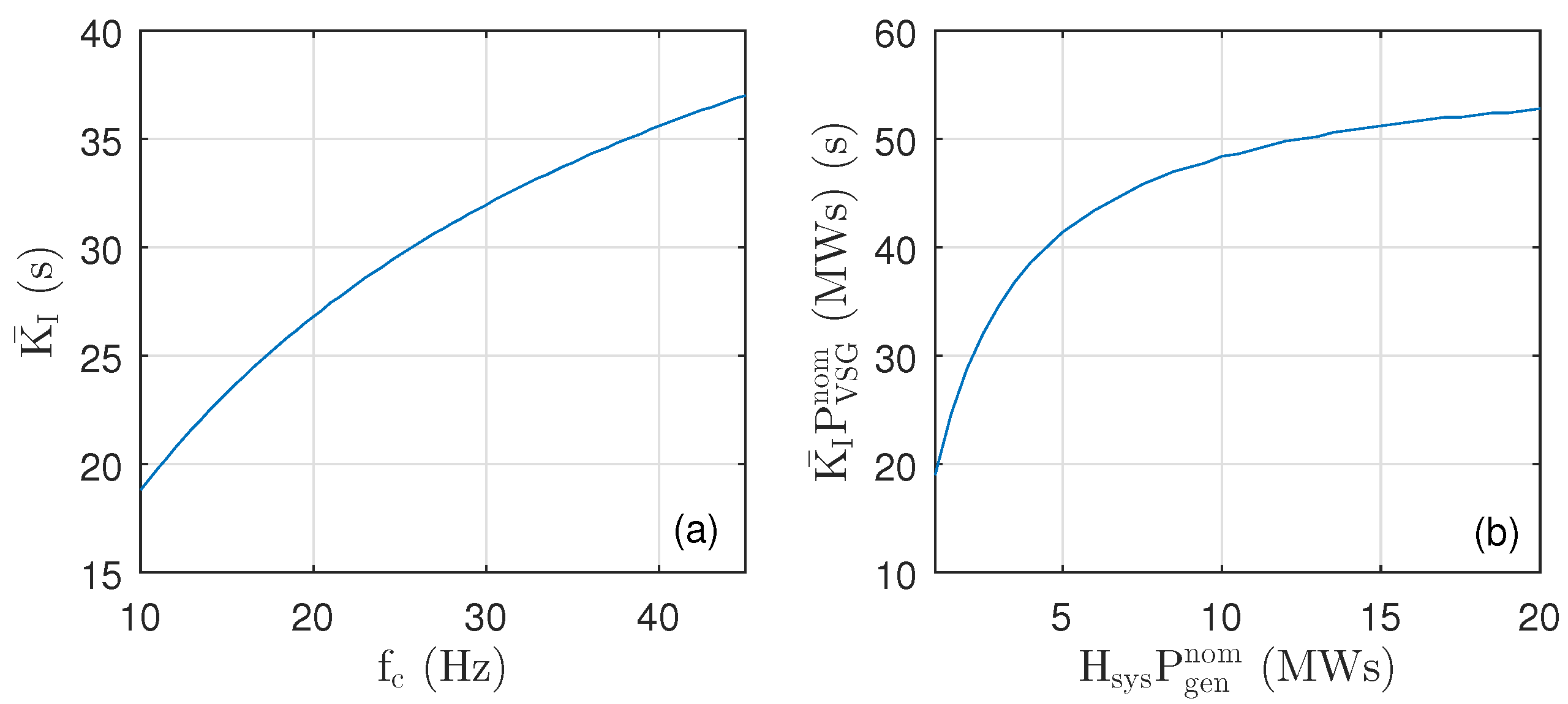
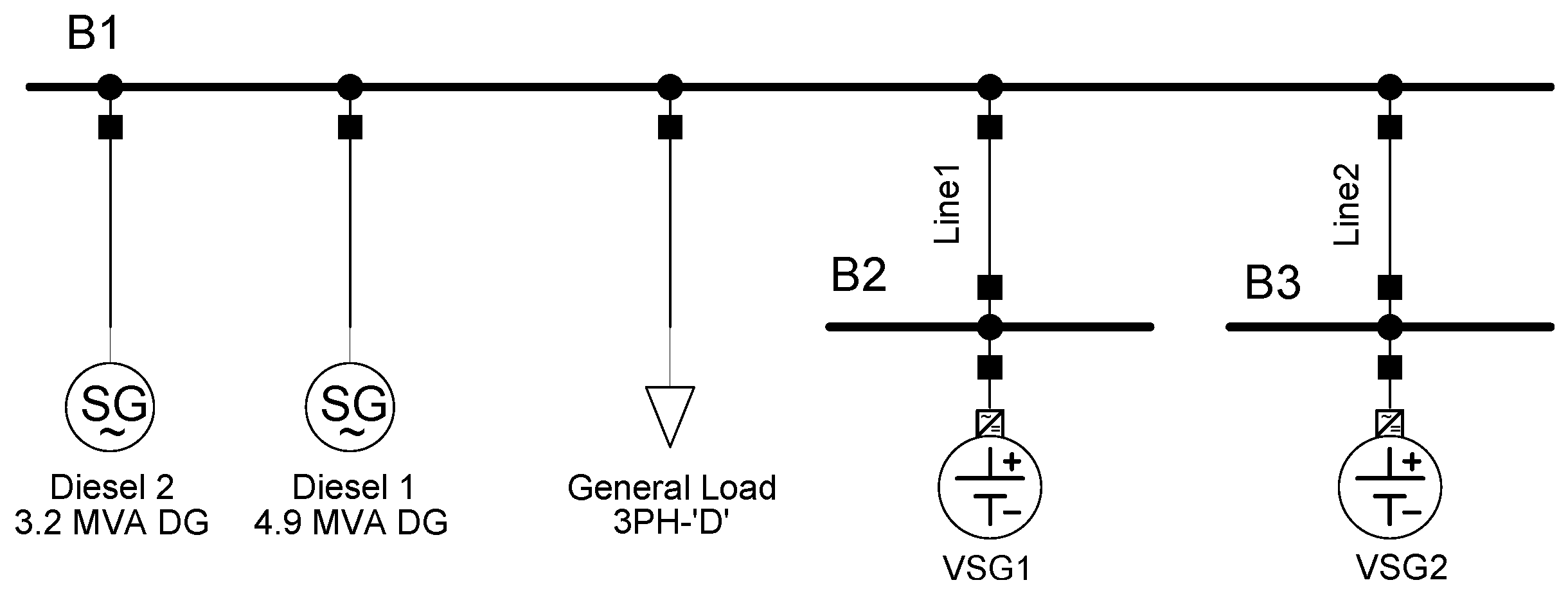
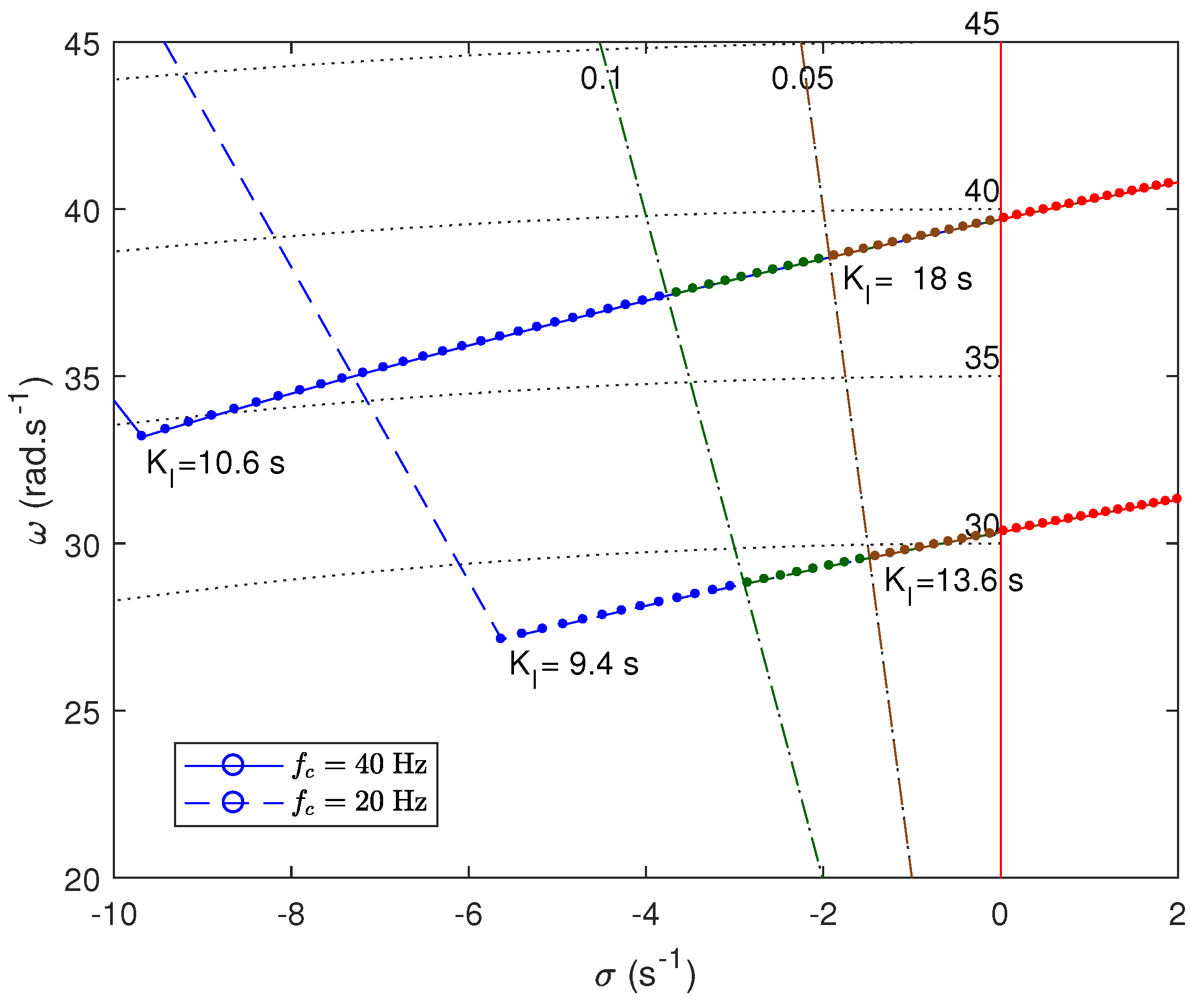
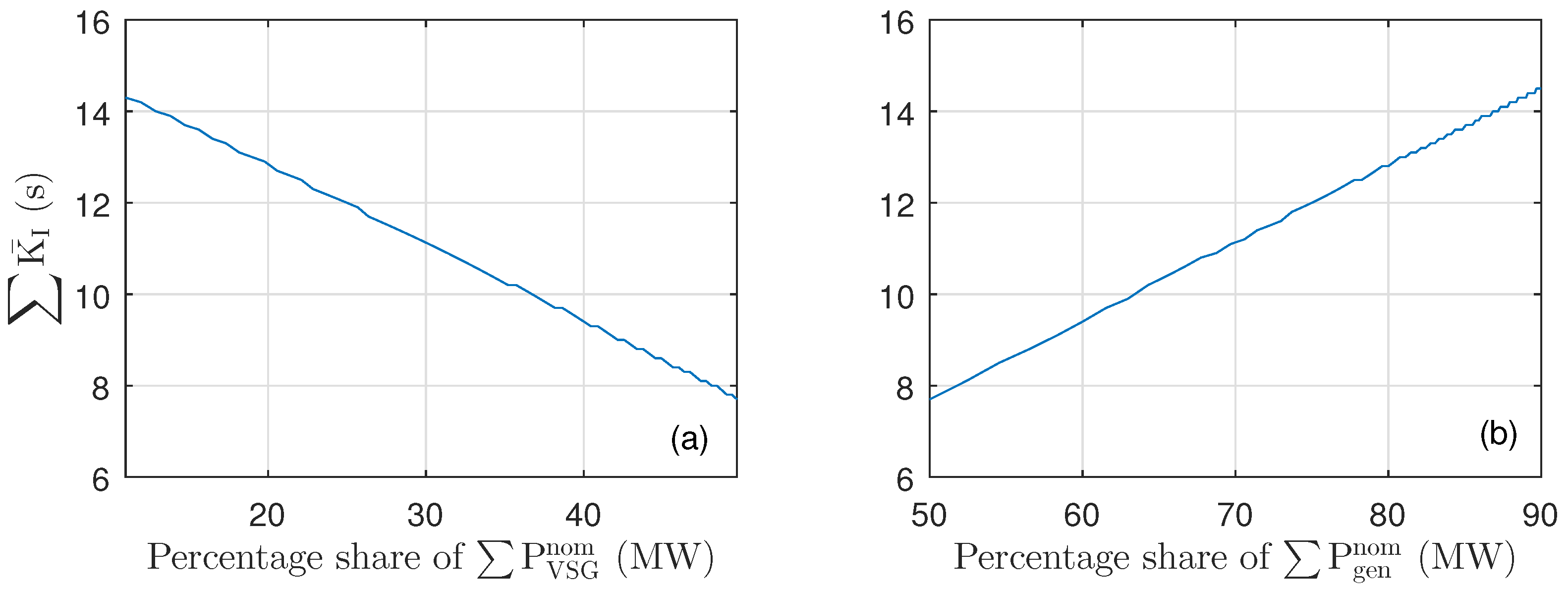
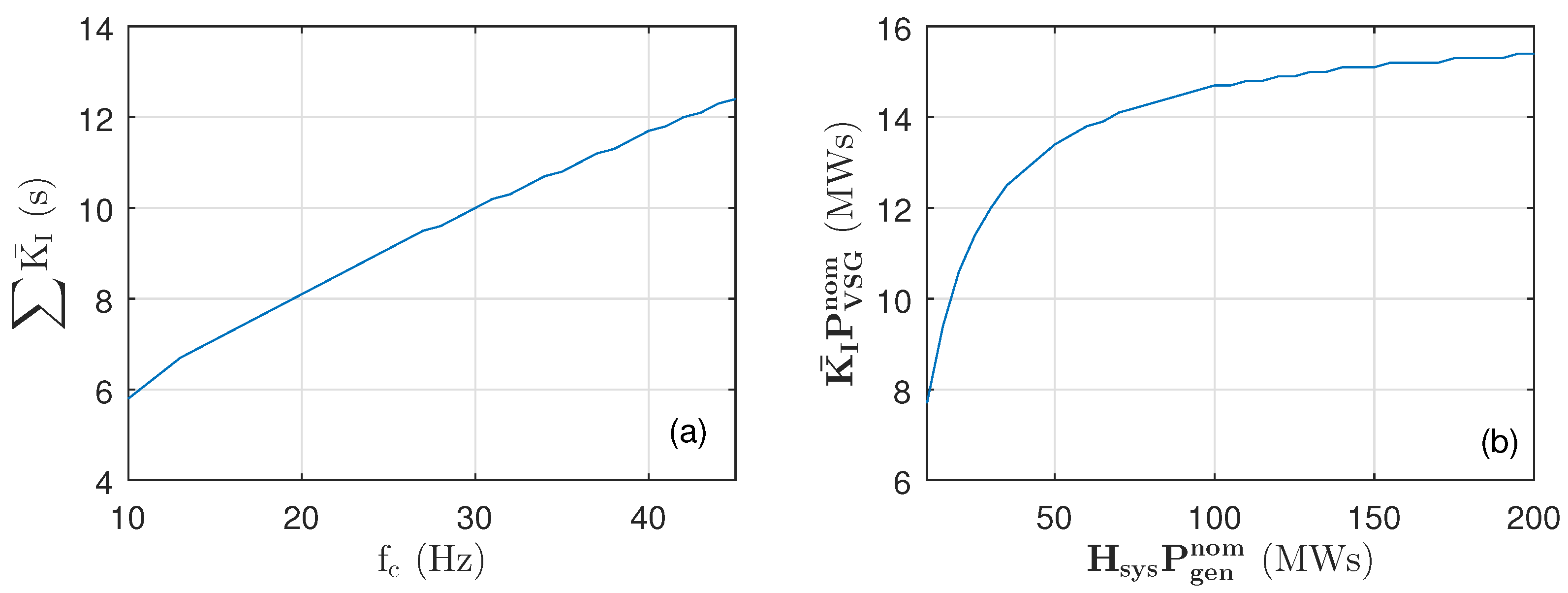
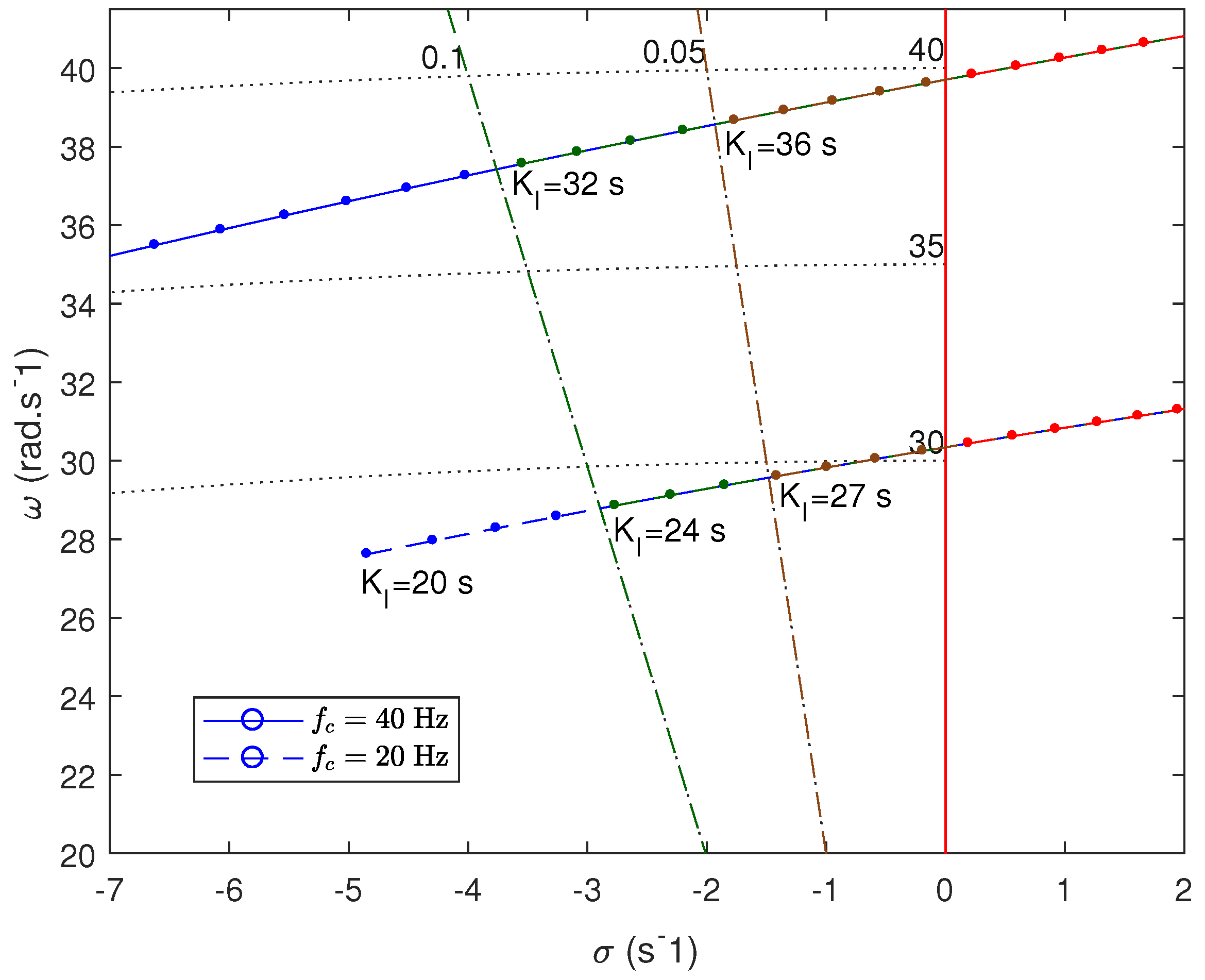
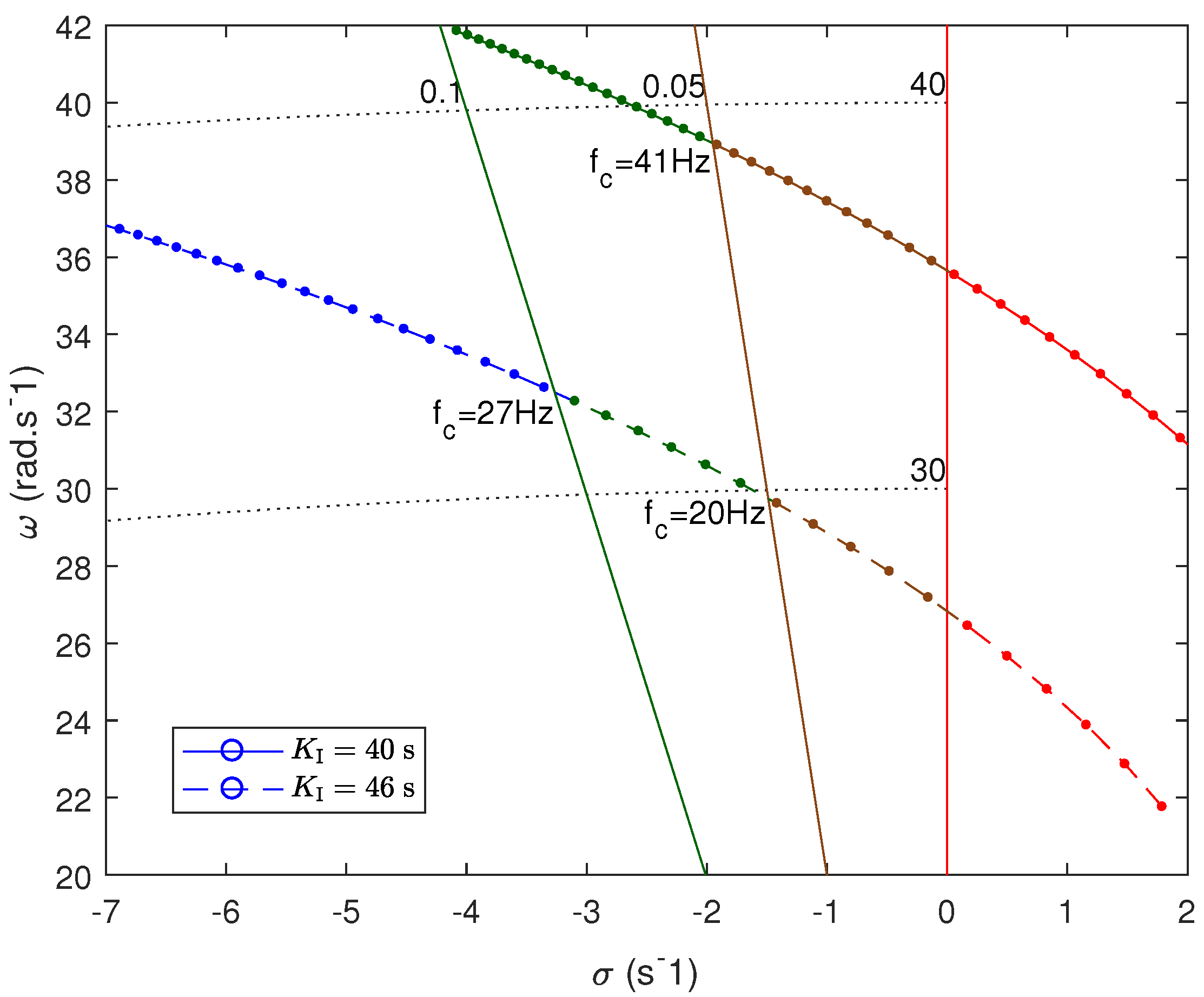
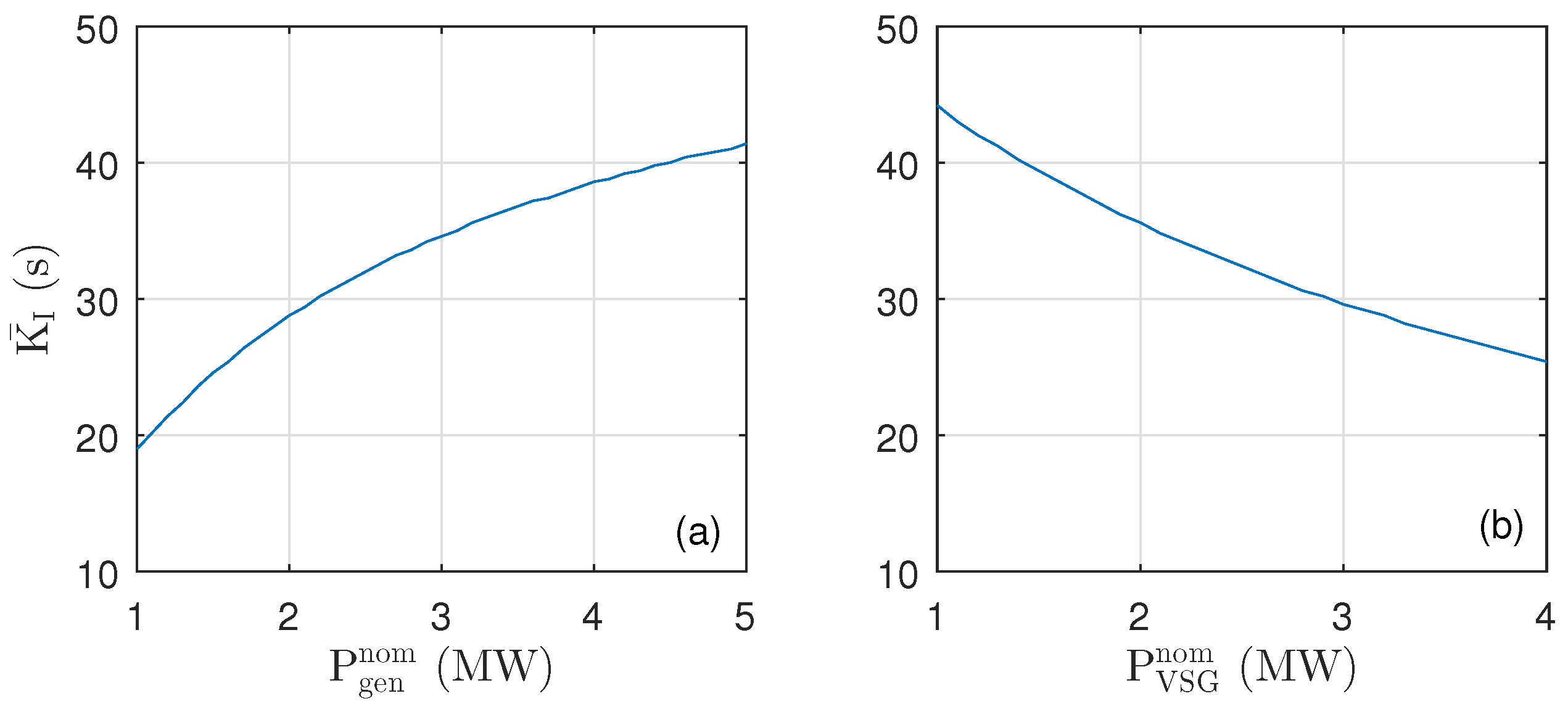
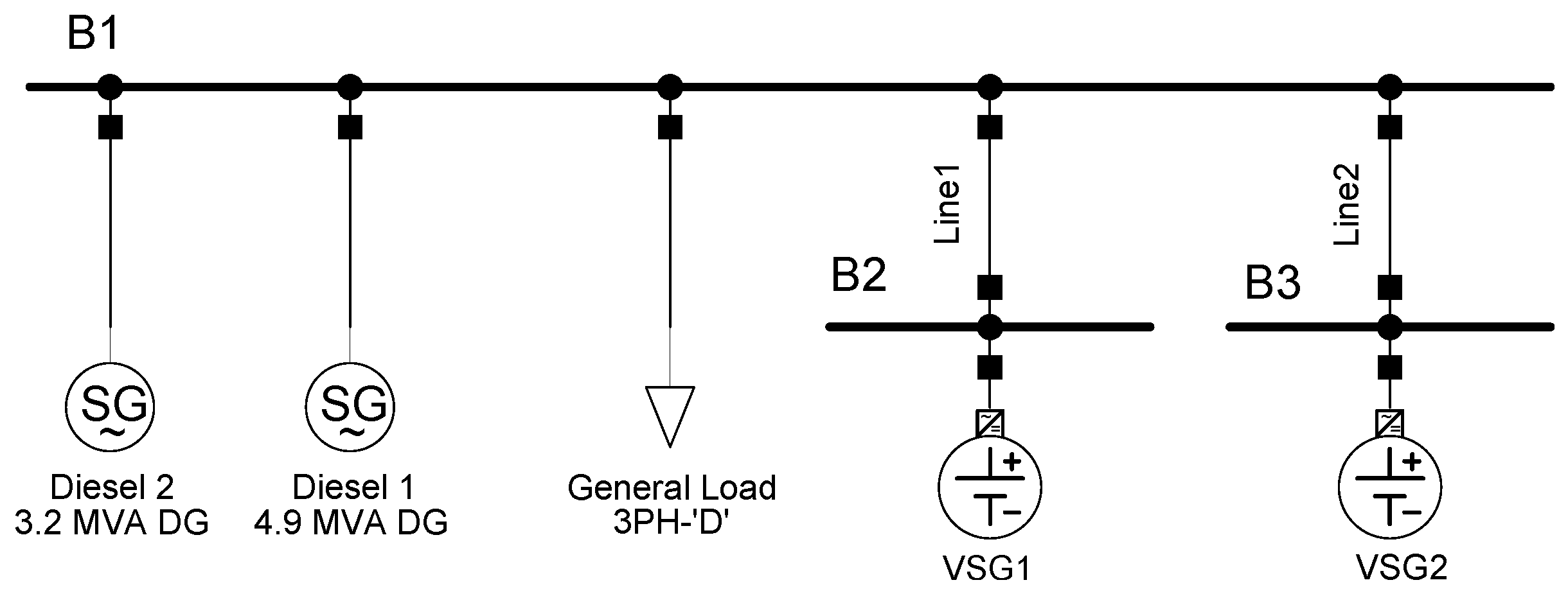
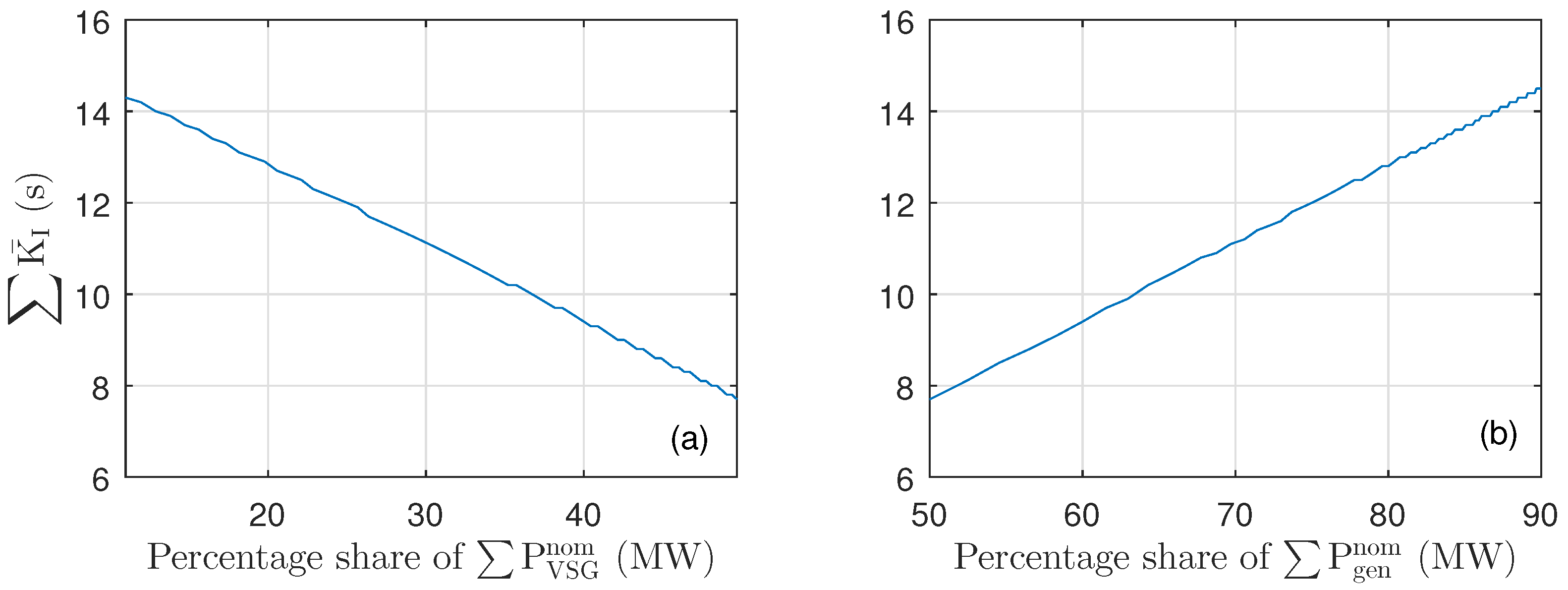
3.2. Multi-Machine System and Stability Analysis
4. Conclusions and Outlook
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| VI | Virtual Inertia |
| ESS | Energy Storage System |
| VSG | Virtual Synchronous Generator |
| FFT | Fast Fourier Transform |
| LFC | Load Frequency Control |
| PLL | phase-locked Loop |
| RoCoF | Rate-of-Change-of-Frequency |
| SMSIB | Single Machine Single Inverter Bus |
| SOGI-FLL | Second Order Generalized Integrator Frequency Locked Loop |
| STFT | Short Time Fourier Transform |
References
- Ørum, E.; Kuivaniemi, M.; Laasonen, M.; Bruseth, A.I.; Jansson, E.A.; Danell, A.; Elkington, K.; Modig, N. Future System Inertia; European Network of Transmission System Operators for Electricity (ENTSO-E): Brussels, Belgium, 2015. [Google Scholar]
- Thiesen, H.; Jauch, C.; Gloe, A. Design of a System Substituting Today’s Inherent Inertia in the European Continental Synchronous Area. Energies 2016, 9, 582. [Google Scholar] [CrossRef]
- Milano, F.; Dörfler, F.; Hug, G.; Hill, D.J.; Verbic, G. Foundations and challenges of low-inertia systems. In Proceedings of the 20th Power System Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2017. [Google Scholar]
- Matevosyan, J.; Sharma, S.; Huang, S.H.; Woodfin, D.; Ragsdale, K.; Moorty, S.; Wattles, P.; Li, W. Proposed future ancillary services in electric reliability council of Texas. In Proceedings of the PowerTech Eindhoven 2015 Conference, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar] [CrossRef]
- European Network of Transmission System Operators for Electricity (ENTSO-E); Eurelectric. Deterministic Frequency Deviations–Root Causes and Proposals for Potential Solutions; ENTSO-E: Brussels, Belgium; Eurelectric: Brussels, Belgium, 2011. [Google Scholar]
- European Network of Transmission System Operators for Electricity (ENTSO-E). Frequency Stability Evaluation Criteria for the Synchronous Zone of Continental Europe; ENTSO-E: Brussels, Belgium, 2006. [Google Scholar]
- Xypolytou, E.; Gawlik, W.; Zseby, T.; Fabini, J. Impact of asynchronous renewable generation infeed on grid frequency: Analysis based on synchrophasor measurements. Sustainability 2018, 10, 1605. [Google Scholar] [CrossRef]
- Seyedi, M.; Bollen, M. The Utilization of Synthetic Inertia from Wind Farms and Its Impact on Existing Speed Governors and System Performance; Elforsk AB: Stockholm, Sweden, 2013. [Google Scholar]
- Van de Vyver, J.; De Kooning, J.D.M.; Meersman, B.; Vandevelde, L.; Vandoorn, T.L. Droop control as an alternative inertial response strategy for the synthetic inertia on wind turbines. IEEE Trans. Power Syst. 2016, 31, 1129–1138. [Google Scholar] [CrossRef]
- Cooke, A.; Strickland, D.; Forkasiewicz, K. Energy storage for enhanced frequency response services. In Proceedings of the 52nd International Universities Power Engineering Conference (UPEC), Heraklion, Greece, 28–31 August 2017. [Google Scholar] [CrossRef]
- Knap, V.; Sinha, R.; Swierczynski, M.; Stroe, D.I.; Chaudhary, S. Grid inertial response with lithium-ion battery energy storage systems. In Proceedings of the IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 1817–1822. [Google Scholar]
- Bevrani, H. Robust Power System Frequency Control; Springer: Berlin, Germany, 2016. [Google Scholar]
- Akke, M. Frequency estimation by demodulation of two complex signals. IEEE Trans. Power Deliv. 1997, 12, 157–163. [Google Scholar] [CrossRef]
- Begovic, M.M.; Djuric, P.M.; Dunlap, S.; Phadke, A.G. Frequency tracking in power networks in the presence of harmonics. IEEE Trans. Power Deliv. 1993, 8, 480–486. [Google Scholar] [CrossRef]
- Giray, M.; Sachdev, M. Off-nominal frequency measurements in electric power systems. IEEE Trans. Power Deliv. 1989, 4, 1573–1578. [Google Scholar] [CrossRef]
- Xia, Y.; Douglas, S.C.; Mandic, D.P. Adaptive frequency estimation in smart grid applications: Exploiting noncircularity and widely linear adaptive estimators. IEEE Signal Process. Mag. 2012, 29, 44–54. [Google Scholar] [CrossRef]
- Girgis, A.A.; Peterson, W.L. Adaptive estimation of power system frequency deviation and its rate of change for calculating sudden power system overloads. IEEE Trans. Power Deliv. 1990, 5, 585–594. [Google Scholar] [CrossRef]
- Rodríguez, P.; Pou, J.; Bergas, J.; Candela, J.I.; Burgos, R.P.; Boroyevich, D. Decoupled double synchronous reference frame PLL for power converters control. IEEE Trans. Power Electron. 2007, 22, 584–592. [Google Scholar] [CrossRef]
- Adeuyi, O.D.; Cheah-Mane, M.; Liang, J.; Jenkins, N. Fast Frequency Response From Offshore Multiterminal VSC–HVDC Schemes. IEEE Trans. Power Deliv. 2017, 32, 2442–2452. [Google Scholar] [CrossRef]
- Rezkalla, M.; Zecchino, A.; Martinenas, S.; Prostejovsky, A.M.; Marinelli, M. Comparison between synthetic inertia and fast frequency containment control based on single phase EVs in a microgrid. Appl. Energy 2018, 210, 764–775. [Google Scholar] [CrossRef]
- Milano, F. Small-signal stability analysis of large power systems with inclusion of multiple delays. IEEE Trans. Power Syst. 2016, 31, 3257–3266. [Google Scholar] [CrossRef]
- Markovic, U.; Aristidou, P.; Hug, G. Stability Performance of Power Electronic Deviceswith Time Delays. In Proceedings of the 2017 IEEE Manchester PowerTech Conference, Manchester, UK, 18–22 June 2017. [Google Scholar]
- Markiewicz, H.; Klajn, A. Voltage Disturbances Standard EN 50160-Voltage Characteristics in Public Distribution Systems; Copper Development Association Inc.: New York, NY, USA, 2004. [Google Scholar]
- Marinescu, C.; Serban, I.; Teodorescu, R. Energy storage systems impact on the short-term frequency stability of distributed autonomous microgrids, an analysis using aggregate models. IET Renew. Power Gener. 2013, 7, 531–539. [Google Scholar]
- Hatziargyriou, N.; Cutsem, T.V.; Milanović, J.; Pourbeik, P.; Vournas, C.; Vlachokyriakou, O.; Kotsampopoulos, P.; Hong, M.; Ramos, R.; Boemer, J.; et al. Contribution to Bulk System Control and Stability by Distributed Energy Resources connected at Distribution Network; Report PES-TR22; IEEE Power & Energy Society: Piscataway, NJ, USA, 2017. [Google Scholar]
- Egan, W. Phase-Lock Basics; Wiley-Interscience IEEE: Hoboken, NJ, USA, 2008. [Google Scholar]
- The MathWorks, Inc. PLL (3ph) Function in SimPowerSystems Toolbox from Matlab 2015b; The MathWorks, Inc.: Natick, MA, USA, 2015. [Google Scholar]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 29. [Google Scholar]
- Liu, G.; Zinober, A.; Shtessel, Y.B. Second-order SM approach to SISO time-delay system output tracking. IEEE Trans. Ind. Electron. 2009, 56, 3638–3645. [Google Scholar]
- Machowski, J.; Bialek, J.; Bumby, D.J. Power System Dynamics: Stability and Control, 2nd ed.; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.; Hansen, T.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Probst, A.; Magana, M.; Sawodny, O. Using a Kalman filter and a Pade approximation to estimate random time delays in a networked feedback control system. IET Control Theory Appl. 2010, 4, 2263–2272. [Google Scholar] [CrossRef]
- Hammer, A. Analysis of IEEE Power System Stabilizer Models. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Ålesund, Gjøvik, Norway, June 2011. [Google Scholar]
- Pal, B.; Chaudhuri, B. Robust Control in Power Systems; Springer: Berlin, Germany, 2006. [Google Scholar]
- WG7 “Power frequency measurement for DER management”. Available online: https://bit.ly/2NARMMV (accessed on 10 July 2018).
- European Network of Transmission System Operators for Electricity (ENTSO-E). Frequency Measurement Requirements and Usage-Final Version 7; ENTSO-E: Brussels, Belgium, 29 January 2018. [Google Scholar]
- European Network of Transmission System Operators for Electricity (ENTSO-E). High Penetration of Power Electronic Interfaced Power Sources (HPoPEIPS), ENTSO-E Guidance Document for National Implementation for Network Codes on Grid Connection; ENTSO-E: Brussels, Belgium, 2017. [Google Scholar]
- Ortega, Á.; Milano, F. Comparison of different PLL implementations for frequency estimation and control. In Proceedings of the 18th International Conference on Harmonics and Quality of Power (ICHQP), Ljubljana, Slovenia, 13–16 May 2018. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Harmonic order | 3 | 5 | 7 | 9 | 11 | 13 | 15 | 17 |
| Harmonic amplitude (%) | 5 | 6 | 5 | 1.5 | 3.5 | 3 | 0.5 | 2 |
| Generator | VSG | Load | |||
|---|---|---|---|---|---|
| 3.2 MW | 2 MW | 1 MW | |||
| R | 0.05 p.u. | 0.02 | 0.2 MW | ||
| H | 5 s | 0.02 p.u. | D | 1 | |
| 0.5 s | 5.2 MW | ||||
| 0.2 s | |||||
| Generator 1 | Generator 2 | VSG1 | VSG2 | Load | |||||
|---|---|---|---|---|---|---|---|---|---|
| 3.2 MW | 4.9 MW | 1 MW | 2 MW | 1 MW | |||||
| 5 s | 2 s | 0.01 s | 0.01 s | 1 MW | |||||
| 0.04 p.u. | 0.06 p.u. | 5 | 5 | D | 1 | ||||
| 0.5 s | 0.5 s | 0.02 p.u. | 0.04 p.u. | 11.1 MW | |||||
| 0.2 s | 0.2 s | ||||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, S.; Bletterie, B.; Anta, A.; Gawlik, W. On Small Signal Frequency Stability under Virtual Inertia and the Role of PLLs. Energies 2018, 11, 2372. https://doi.org/10.3390/en11092372
Khan S, Bletterie B, Anta A, Gawlik W. On Small Signal Frequency Stability under Virtual Inertia and the Role of PLLs. Energies. 2018; 11(9):2372. https://doi.org/10.3390/en11092372
Chicago/Turabian StyleKhan, Sohail, Benoit Bletterie, Adolfo Anta, and Wolfgang Gawlik. 2018. "On Small Signal Frequency Stability under Virtual Inertia and the Role of PLLs" Energies 11, no. 9: 2372. https://doi.org/10.3390/en11092372
APA StyleKhan, S., Bletterie, B., Anta, A., & Gawlik, W. (2018). On Small Signal Frequency Stability under Virtual Inertia and the Role of PLLs. Energies, 11(9), 2372. https://doi.org/10.3390/en11092372