A Novel Adaptive Neuro-Control Approach for Permanent Magnet Synchronous Motor Speed Control


Abstract
1. Introduction
- (1)
- A novel adaptive neuro-control controller, called single artificial neuron goal representation heuristic dynamic programming (SAN-GrHDP), based on SAN and GrHDP has been proposed in this paper. This framework, under which the parameter K in the SAN has been updated through a reference learning mechanism, can provide a sequential online control policy.
- (2)
- The formula of SAN-GrHDP approach is derived, and the reinforcement signal and learning process are designed for the vector control of PMSM. Simulation studies have been carried out for the proposed approach. Simulation results demonstrate that the proposed controller has a higher potential of disturbance rejection, with much less speed fluctuation and shorter recovering time towards load disturbance.
- (3)
- Moreover, comparative experiments of original SAN and SAN-GrHDP approaches are performed on the speed control of PMSM under the same conditions and parameters. The results of the experiments verify that SAN-GrHDP can better improve the control effect by interacting with the control object, and has much better robustness than SAN with load mutation and load disturbance.
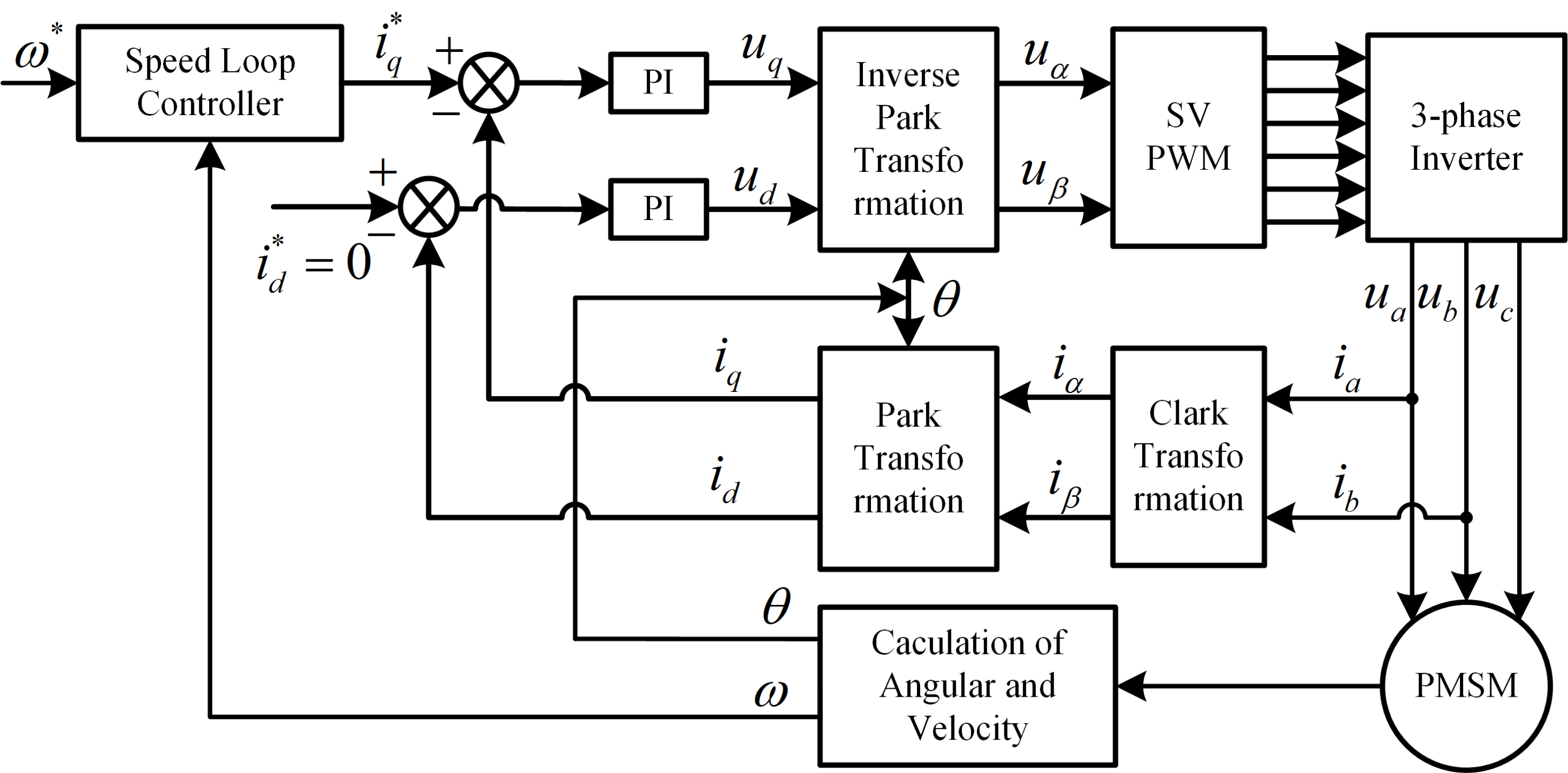
2. Model of Permanent Magnet Synchronous Motor Control System
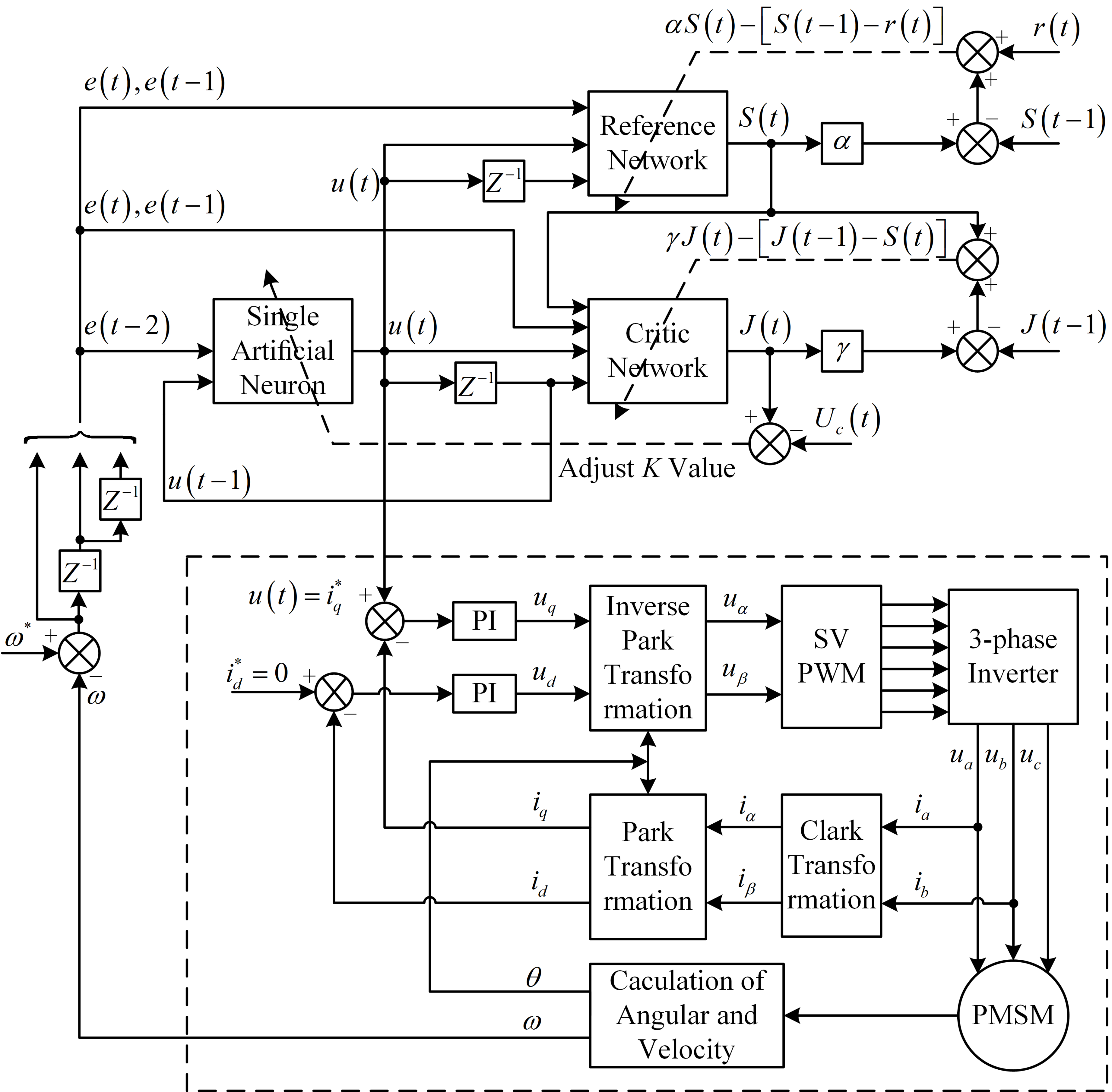
3. Single Artificial Neuron Goal Representation Heuristic Dynamic Programming Controller
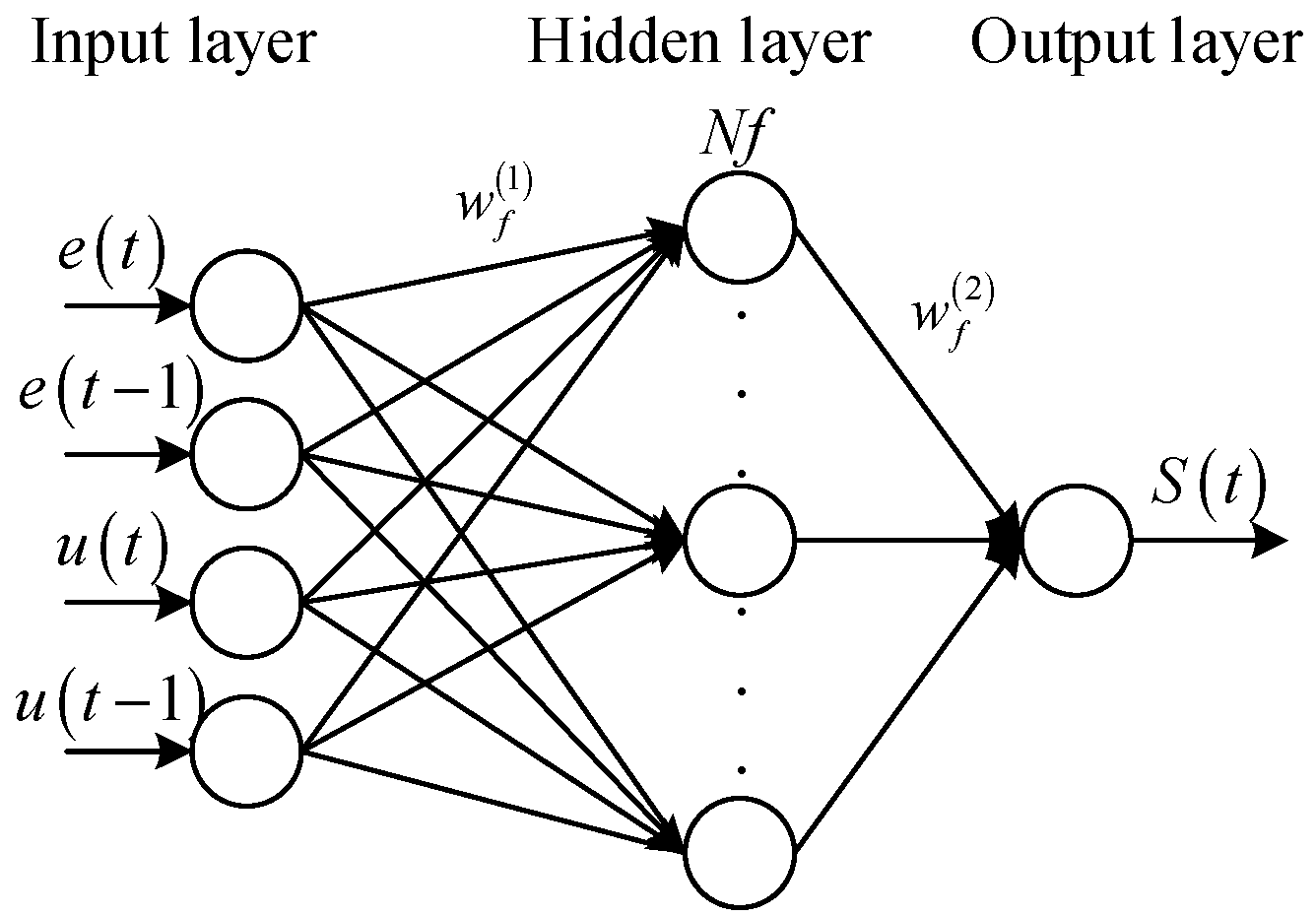
3.1. Learning and Adaptation of Reference Network
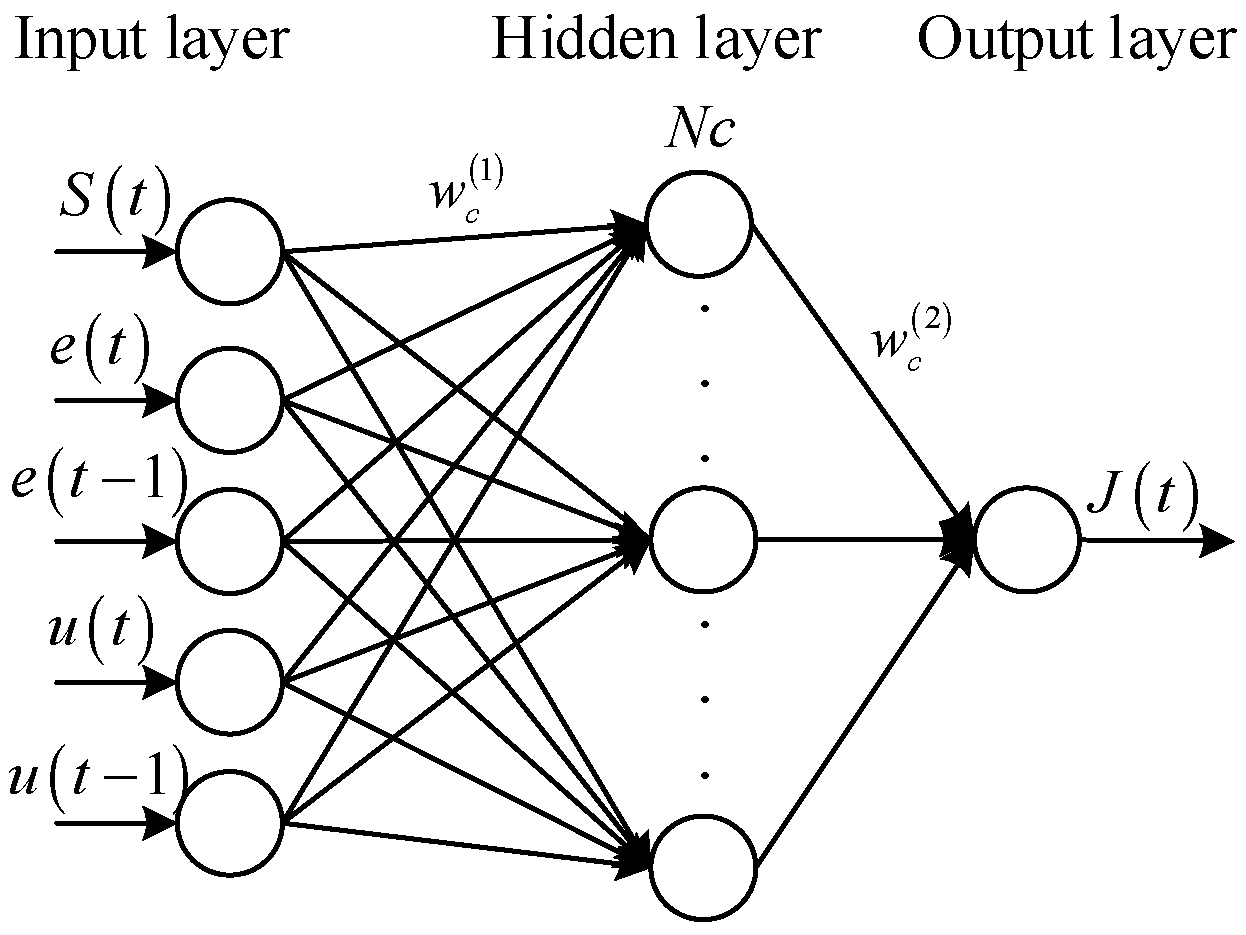
3.2. Learning and Adaptation of Critic Network
3.3. Learning and Adaptation of Action Network
4. Simulation and Experiment Results
4.1. Reinforcement Signal Design of Speed Controller
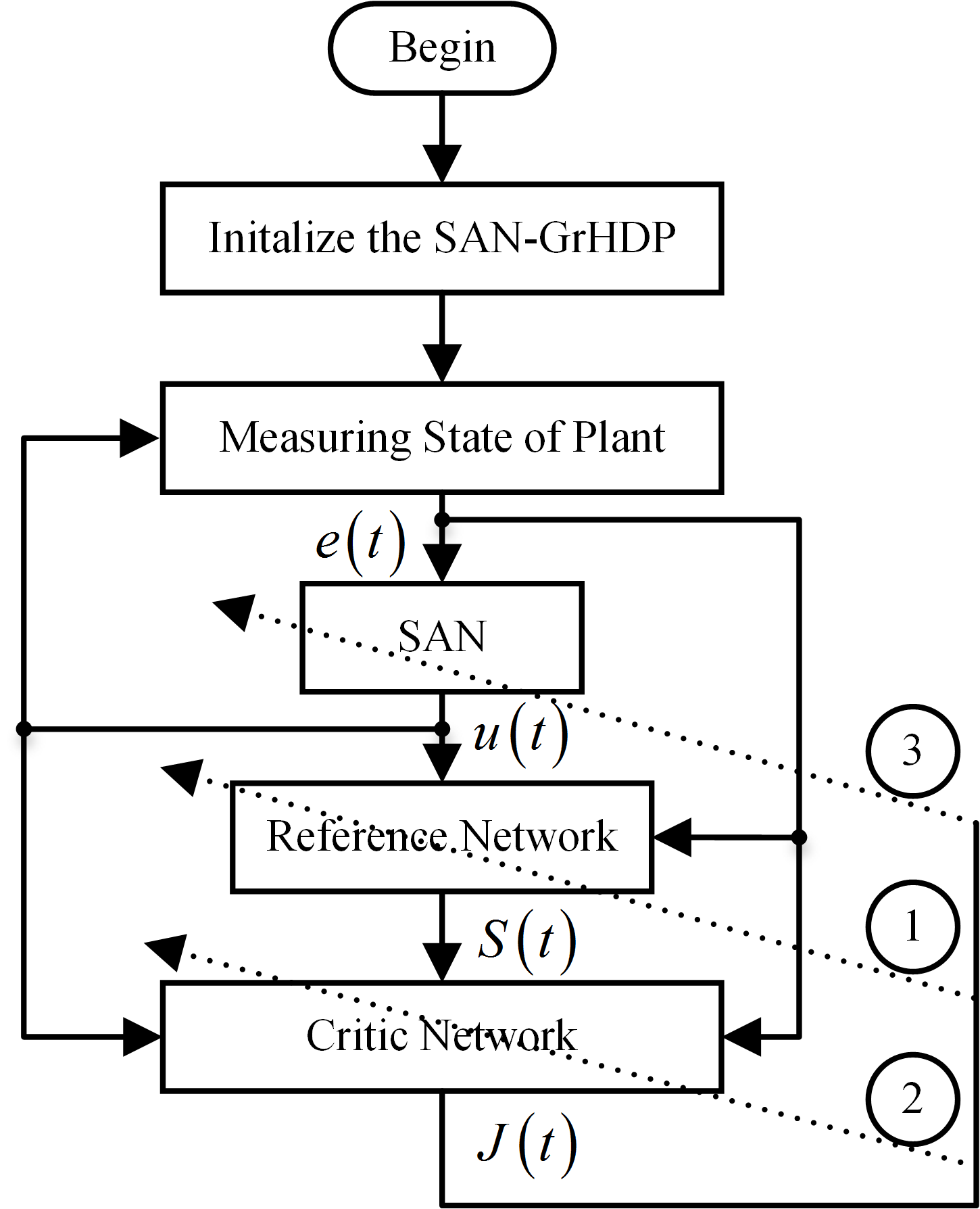
4.2. Learning Process of Single Artificial Neuron Goal Representation Heuristic Dynamic Programming Speed Controller for Permanent Magnet Synchronous Motor
- (1)
- Initialize the various parameters of the SAN-GrHDP, such as neural network learning rate, the initial weights values of neural network, discount factor and so on.
- (2)
- Observe the differences of speed and obtain the control signal that is q-axis current reference value for the control system of PMSM.
- (3)
- Calculate the internal reinforcement learning signal , and the value function signal .
- (4)
- Retrieve the previous time data and , calculate the temporal difference errors and obtain the objective functions in reference network and critic network.
- (5)
- Update the weights values of reference network, critic network and the K value of action network (SAN).
- (6)
- Repeat from the second step when entering the t + 1 step.
4.3. Simulation and Experimental Results
4.3.1. Simulation Results
4.3.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Acronyms
| PMSM | Permanent magnet synchronous motor |
| FOC | Field oriented control |
| SAN-GrHDP | Single artificial neuron goal representation heuristic dynamic programming |
| SAN | Single artificial neuron |
| DSP | Digital signal processor |
| RL | Reinforcement learning |
| ADP | Adaptive dynamic programming |
| GrHDP | Goal representation heuristic dynamic programming |
| HDP | Heuristic dynamic programming |
| DHP | Dual heuristic dynamic programming |
| GDHP | Globalized dual heuristic dynamic programming |
| BP | Back propagation |
Constants
| Stator d-axes inductance | |
| Stator q-axes inductance | |
| Stator resistance | |
| Flux linkage | |
| Viscous friction coefficient | |
| Number of pole pairs | |
| The hidden node number of the reference network | |
| The hidden node number of the critic network |
Variables
| K | Neuron scale-up factor |
| Stator d-axes voltage | |
| Stator q-axes voltage | |
| Stator d-axes current | |
| Stator q-axes current | |
| Load torque | |
| d-axes static coordinate current | |
| q-axes static coordinate current | |
| Rotor position | |
| q-axes reference current | |
| Discounted factor of reference network (0 < < 1) | |
| Discounted factor of critic network (0 < < 1) | |
| External reinforcement signal | |
| Internal reinforcement signal | |
| Cost function | |
| Input vector of the reference network | |
| Control signal | |
| ith hidden node input of the reference network | |
| ith hidden node output of the reference network | |
| The weights adjustments of reference network for the hidden to the output layer | |
| The weights adjustments of reference network for the input to the hidden layer | |
| Input vector of the critic network | |
| lth hidden node input of the critic network | |
| lth hidden node output of the critic network | |
| The weights adjustments of critic network for the hidden to the output layer | |
| The weights adjustments of critic network for the input to the hidden layer | |
| Proportion study rate of SAN | |
| Integral study rate of SAN | |
| Learning rate of the parameter K | |
| Actual angular velocity of PMSM | |
| Reference angular velocity of PMSM | |
| Learning rate of the reference network | |
| Learning rate of the critic network |
References
- Calvini, M.; Carpita, M.; Formentini, A.; Marchesoni, M. PSO-Based Self-Commissioning of Electrical Motor Drives. IEEE Trans. Ind. Electron. 2015, 62, 768–776. [Google Scholar] [CrossRef]
- Li, S.; Liu, Z. Adaptive Speed Control for Permanent-Magnet Synchronous Motor System with Variations of Load Inertia. IEEE Trans. Ind. Electron. 2009, 56, 3050–3059. [Google Scholar] [CrossRef]
- Jung, J.W.; Leu, V.Q.; Do, T.D.; Kim, E.K.; Choi, H.H. Adaptive PID Speed Control Design for Permanent Magnet Synchronous Motor Drives. IEEE Trans. Power Electron. 2015, 30, 900–908. [Google Scholar] [CrossRef]
- Underwood, S.J.; Husain, I. Online Parameter Estimation and Adaptive Control of Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2010, 57, 2435–2443. [Google Scholar] [CrossRef]
- Liu, J.; Li, H.; Deng, Y. Torque Ripple Minimization of PMSM Based on Robust ILC via Adaptive Sliding Mode Control. IEEE Trans. Power Electron. 2018, 33, 3655–3671. [Google Scholar] [CrossRef]
- Repecho, V.; Biel, D.; Arias, A. Fixed Switching Period Discrete-Time Sliding Mode Current Control of a PMSM. IEEE Trans. Ind. Electron. 2018, 65, 2039–2048. [Google Scholar] [CrossRef]
- Joo, K.; Park, J.; Lee, J.; Joo, K.J.; Park, J.S.; Lee, J. Study on Reduced Cost of Non-Salient Machine System Using MTPA Angle Pre-Compensation Method Based on EEMF Sensorless Control. Energies 2018, 11, 1425. [Google Scholar] [CrossRef]
- Park, J.; Wang, X.; Park, J.B.; Wang, X. Sensorless Direct Torque Control of Surface-Mounted Permanent Magnet Synchronous Motors with Nonlinear Kalman Filtering. Energies 2018, 11, 969. [Google Scholar] [CrossRef]
- Su, D.; Zhang, C.; Dong, Y.; Su, D.; Zhang, C.; Dong, Y. An Improved Continuous-Time Model Predictive Control of Permanent Magnetic Synchronous Motors for a Wide-Speed Range. Energies 2017, 10, 2051. [Google Scholar] [CrossRef]
- Yang, M.; Liu, Z.; Long, J.; Qu, W.; Xu, D.; Yang, M.; Liu, Z.; Long, J.; Qu, W.; Xu, D. An Algorithm for Online Inertia Identification and Load Torque Observation via Adaptive Kalman Observer-Recursive Least Squares. Energies 2018, 11, 778. [Google Scholar] [CrossRef]
- Sun, X.; Chen, L.; Yang, Z.; Zhu, H. Speed-Sensorless Vector Control of a Bearingless Induction Motor with Artificial Neural Network Inverse Speed Observer. IEEE/ASME Trans. Mechatron. 2013, 18, 1357–1366. [Google Scholar] [CrossRef]
- Chaoui, H.; Sicard, P. Adaptive Fuzzy Logic Control of Permanent Magnet Synchronous Machines with Nonlinear Friction. IEEE Trans. Ind. Electron. 2012, 59, 1123–1133. [Google Scholar] [CrossRef]
- Barkat, S.; Tlemçani, A.; Nouri, H. Noninteracting Adaptive Control of PMSM Using Interval Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 2011, 19, 925–936. [Google Scholar] [CrossRef]
- Lai, C.K.; Shyu, K.-K. A novel motor drive design for incremental motion system via sliding-mode control method. IEEE Trans. Ind. Electron. 2005, 52, 499–507. [Google Scholar] [CrossRef]
- Liu, J.; Vazquez, S.; Wu, L.; Marquez, A.; Gao, H.; Franquelo, L.G. Extended State Observer-Based Sliding-Mode Control for Three-Phase Power Converters. IEEE Trans. Ind. Electron. 2017, 64, 22–31. [Google Scholar] [CrossRef]
- Do, T.D.; Kwak, S.; Choi, H.H.; Jung, J.W. Suboptimal Control Scheme Design for Interior Permanent-Magnet Synchronous Motors: An SDRE-Based Approach. IEEE Trans. Power Electron. 2014, 29, 3020–3031. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Chen, L.; Yang, Z. Internal Model Control for a Bearingless Permanent Magnet Synchronous Motor Based on Inverse System Method. IEEE Trans. Energy Convers. 2016, 31, 1539–1548. [Google Scholar] [CrossRef]
- Sun, X.; Chen, L.; Jiang, H.; Yang, Z.; Chen, J.; Zhang, W. High-Performance Control for a Bearingless Permanent-Magnet Synchronous Motor Using Neural Network Inverse Scheme Plus Internal Model Controllers. IEEE Trans. Ind. Electron. 2016, 63, 3479–3488. [Google Scholar] [CrossRef]
- Si, J.; Wang, Y.-T. Online learning control by association and reinforcement. IEEE Trans. Neural Netw. 2001, 12, 264–276. [Google Scholar] [CrossRef] [PubMed]
- Prokhorov, D.V.; Wunsch, D.C. Adaptive critic designs. IEEE Trans. Neural Netw. 1997, 8, 997–1007. [Google Scholar] [CrossRef] [PubMed]
- He, H.; Ni, Z.; Fu, J. A three-network architecture for on-line learning and optimization based on adaptive dynamic programming. Neurocomputing 2012, 78, 3–13. [Google Scholar] [CrossRef]
- He, H. Adaptive Dynamic Programming for Machine Intelligence. In Self-Adaptive Systems for Machine Intelligence; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2011; pp. 140–164. ISBN 978-1-118-02560-4. [Google Scholar]
- Tang, Y.; He, H.; Wen, J.; Liu, J. Power System Stability Control for a Wind Farm Based on Adaptive Dynamic Programming. IEEE Trans. Smart Grid 2015, 6, 166–177. [Google Scholar] [CrossRef]
- Tang, Y.; Mu, C.; He, H. SMES-Based Damping Controller Design Using Fuzzy-GrHDP Considering Transmission Delay. IEEE Trans. Appl. Supercond. 2016, 26, 1–6. [Google Scholar] [CrossRef]
- Tang, Y.; Yang, J.; Yan, J.; He, H. Intelligent load frequency controller using GrADP for island smart grid with electric vehicles and renewable resources. Neurocomputing 2015, 170, 406–416. [Google Scholar] [CrossRef]
- Mishra, S. Neural-network-based adaptive UPFC for improving transient stability performance of power system. IEEE Trans. Neural Netw. 2006, 17, 461–470. [Google Scholar] [CrossRef] [PubMed]
- Cao, H.; Li, X. Thermal Management-Oriented Multivariable Robust Control of a kW-Scale Solid Oxide Fuel Cell Stand-Alone System. IEEE Trans. Energy Convers. 2016, 31, 596–605. [Google Scholar] [CrossRef]
- Butt, C.B.; Rahman, M.A. Untrained Artificial Neuron-Based Speed Control of Interior Permanent-Magnet Motor Drives Over Extended Operating Speed Range. IEEE Trans. Ind. Appl. 2013, 49, 1146–1153. [Google Scholar] [CrossRef]
- Ma, G.Y.; Chen, W.Y.; Cui, F.; Zhang, W.P.; Wu, X.S. Adaptive levitation control using single neuron for micromachined electrostatically suspended gyroscope. Electron. Lett. 2010, 46, 406–408. [Google Scholar] [CrossRef]
- Zhong, X.; Ni, Z.; He, H. A Theoretical Foundation of Goal Representation Heuristic Dynamic Programming. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 2513–2525. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Zhang, Y.; Zhang, H. A self-learning call admission control scheme for CDMA cellular networks. IEEE Trans. Neural Netw. 2005, 16, 1219–1228. [Google Scholar] [CrossRef] [PubMed]
- Lin, W.-S.; Yang, P.-C. Adaptive critic motion control design of autonomous wheeled mobile robot by dual heuristic programming. Automatica 2008, 44, 2716–2723. [Google Scholar] [CrossRef]
- Liu, Y.J.; Gao, Y.; Tong, S.; Li, Y. Fuzzy Approximation-Based Adaptive Backstepping Optimal Control for a Class of Nonlinear Discrete-Time Systems with Dead-Zone. IEEE Trans. Fuzzy Syst. 2016, 24, 16–28. [Google Scholar] [CrossRef]
- Nguyen, T.L. Adaptive dynamic programming-based design of integrated neural network structure for cooperative control of multiple MIMO nonlinear systems. Neurocomputing 2017, 237, 12–24. [Google Scholar] [CrossRef]
- Mu, C.; Ni, Z.; Sun, C.; He, H. Data-Driven Tracking Control with Adaptive Dynamic Programming for a Class of Continuous-Time Nonlinear Systems. IEEE Trans. Cybern. 2017, 47, 1460–1470. [Google Scholar] [CrossRef] [PubMed]
- Tang, Y.; He, H.; Ni, Z.; Zhong, X.; Zhao, D.; Xu, X. Fuzzy-Based Goal Representation Adaptive Dynamic Programming. IEEE Trans. Fuzzy Syst. 2016, 24, 1159–1175. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Yu, X. Design and Implementation of Terminal Sliding Mode Control Method for PMSM Speed Regulation System. IEEE Trans. Ind. Inf. 2013, 9, 1879–1891. [Google Scholar] [CrossRef]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D. Analysis of Electric Machinery; Wiley-IEEE Press: New York, NY, USA, 1995; ISBN 978-0-7803-1101-5. [Google Scholar]
- Ni, Z.; He, H.; Wen, J.; Xu, X. Goal Representation Heuristic Dynamic Programming on Maze Navigation. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 2038–2050. [Google Scholar] [CrossRef] [PubMed]
- Shen, Y.; Chen, W.; Yao, W.; Liao, S.; Wen, J. Supplementary Damping Control of VSC-HVDC for Interarea Oscillation Using Goal Representation Heuristic Dynamic Programming. In Proceedings of the 12th IET International Conference on AC and DC Power Transmission (ACDC 2016), Beijing, China, 28–29 May 2016. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Symbol | Value |
|---|---|---|
| Learning rate of the action network | 0.5 | |
| Learning rate of the reference network | 0.03 | |
| Learning rate of the critic network | 0.03 | |
| Discount factor of the reference network | 0.98 | |
| Discount factor of the critic network | 0.95 | |
| Hidden node number of the critic network | 8 | |
| Hidden node number of the reference network | 8 |
| Parameter | Symbol | Value |
|---|---|---|
| Rated Voltage | 36 V | |
| Rated Current | 4.6 A | |
| Maximum Current | 13.8 A | |
| Rated Power | 100 W | |
| Rated Torque | 0.318 N·m | |
| Stator Phase Resistance | 0.375 Ohm | |
| Motor Inertia | 0.0588 kg·m2·10−4 | |
| Pole Pairs | 4 Pair | |
| Q-axis Inductance | 0.001 H | |
| D-axis Inductance | 0.001 H | |
| Incremental Encoder Lines | 2500PPR |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Yu, H.; Wang, M.; Qi, X. A Novel Adaptive Neuro-Control Approach for Permanent Magnet Synchronous Motor Speed Control. Energies 2018, 11, 2355. https://doi.org/10.3390/en11092355
Wang Q, Yu H, Wang M, Qi X. A Novel Adaptive Neuro-Control Approach for Permanent Magnet Synchronous Motor Speed Control. Energies. 2018; 11(9):2355. https://doi.org/10.3390/en11092355
Chicago/Turabian StyleWang, Qi, Haitao Yu, Min Wang, and Xinbo Qi. 2018. "A Novel Adaptive Neuro-Control Approach for Permanent Magnet Synchronous Motor Speed Control" Energies 11, no. 9: 2355. https://doi.org/10.3390/en11092355
APA StyleWang, Q., Yu, H., Wang, M., & Qi, X. (2018). A Novel Adaptive Neuro-Control Approach for Permanent Magnet Synchronous Motor Speed Control. Energies, 11(9), 2355. https://doi.org/10.3390/en11092355