Modeling of Multiple Master–Slave Control under Island Microgrid and Stability Analysis Based on Control Parameter Configuration

Abstract
:1. Introduction
2. The Structure of Multi-Source Microgrid and Analysis of Its Problems
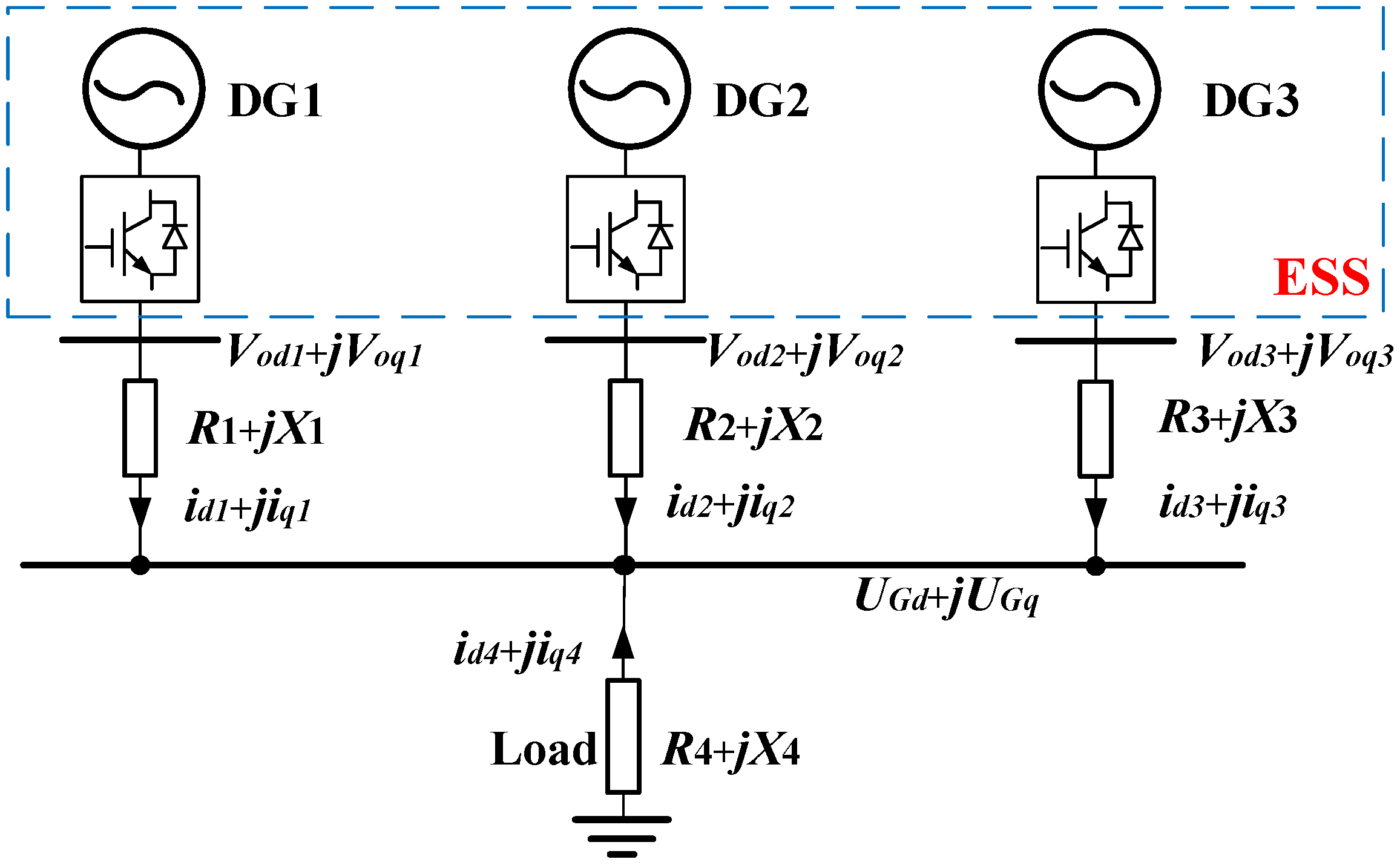
2.1. Multi Master–Slave Control Structure of MG
2.2. The Problem under Study
3. Theoretical Analysis of Control Methods
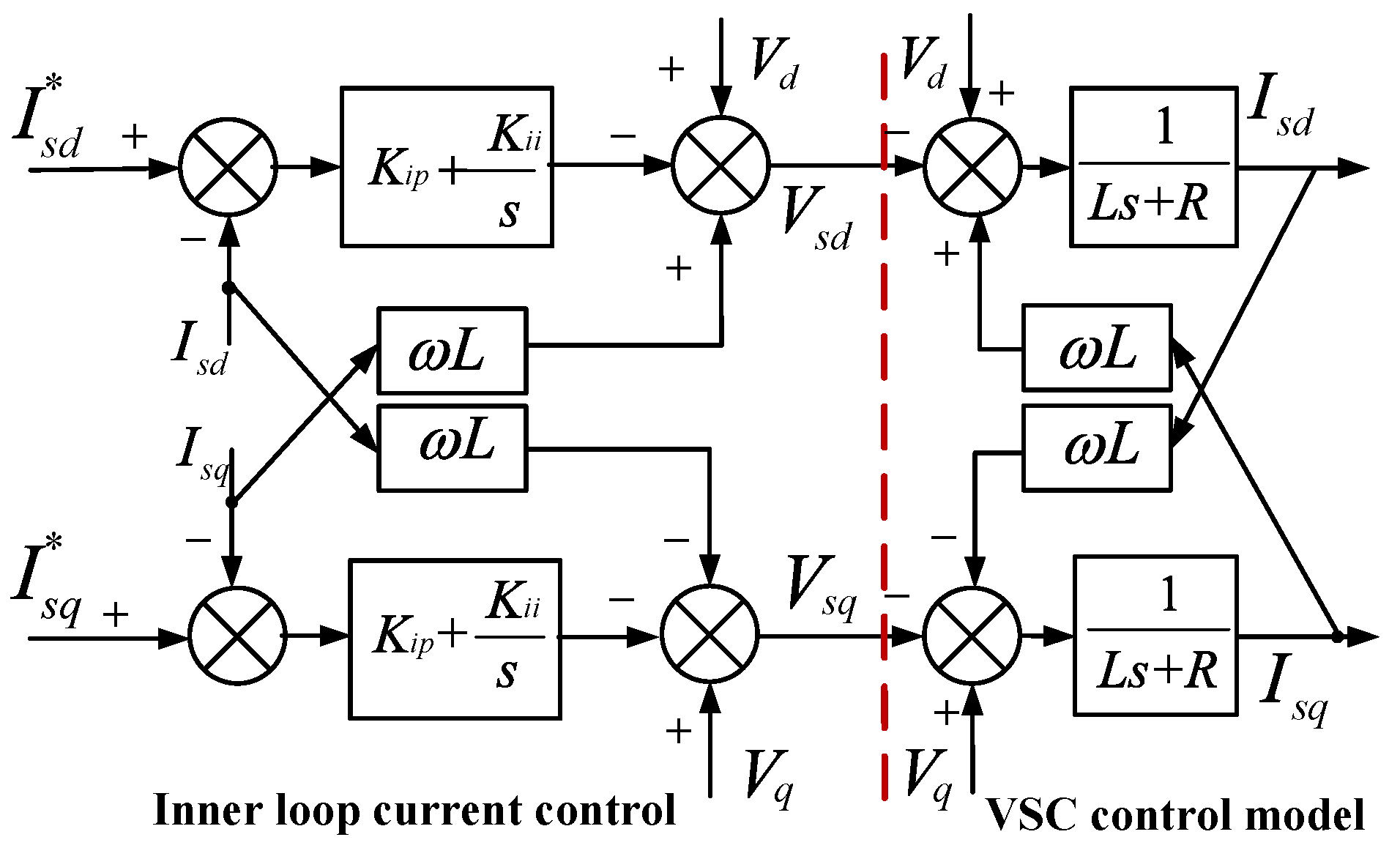
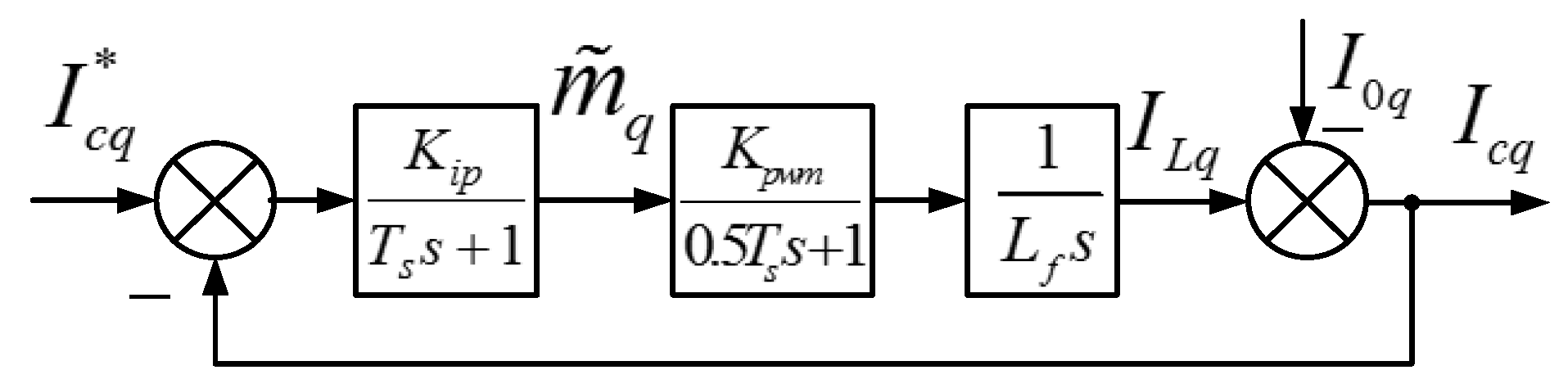
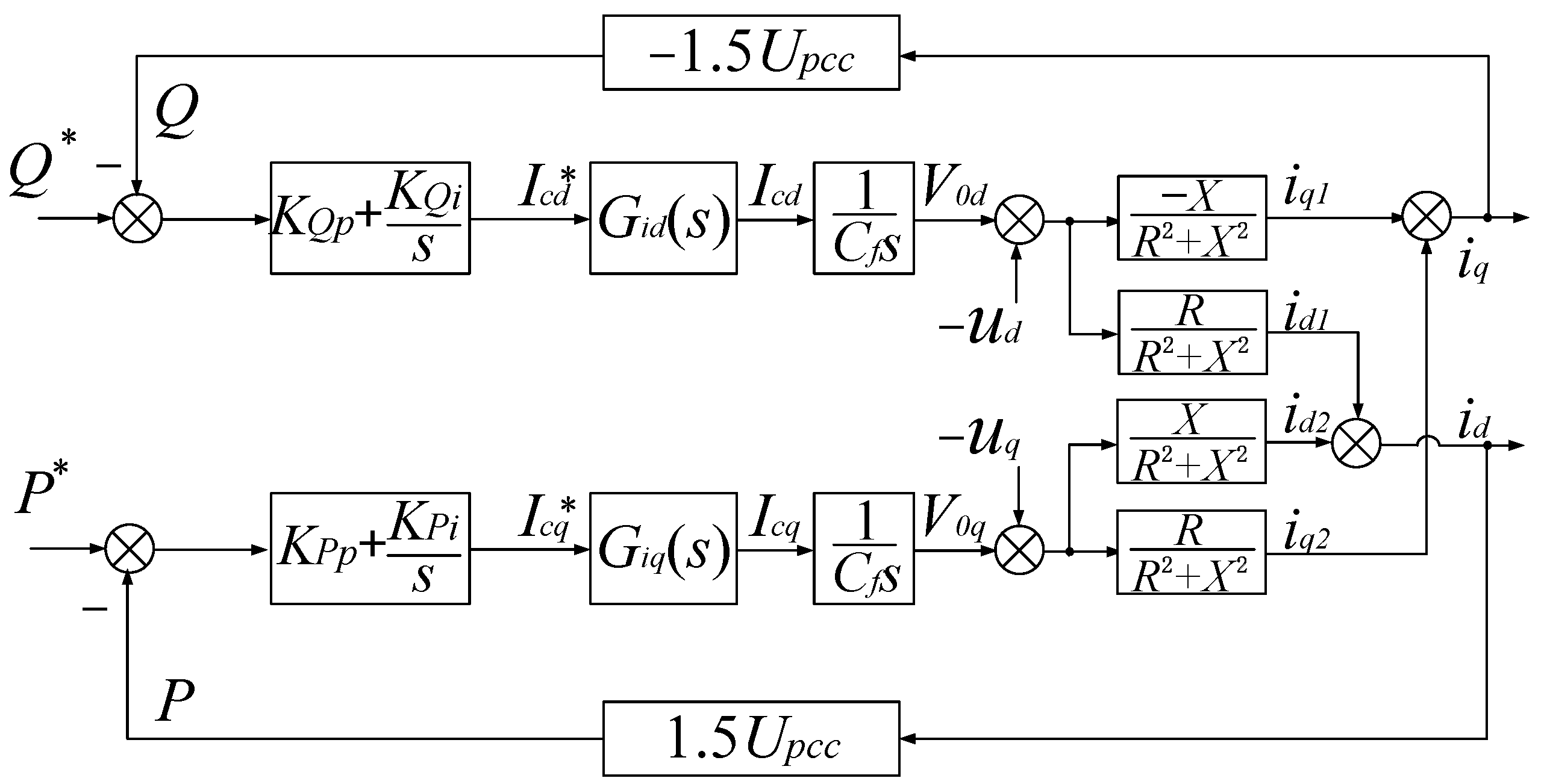
3.1. PQ Control Method
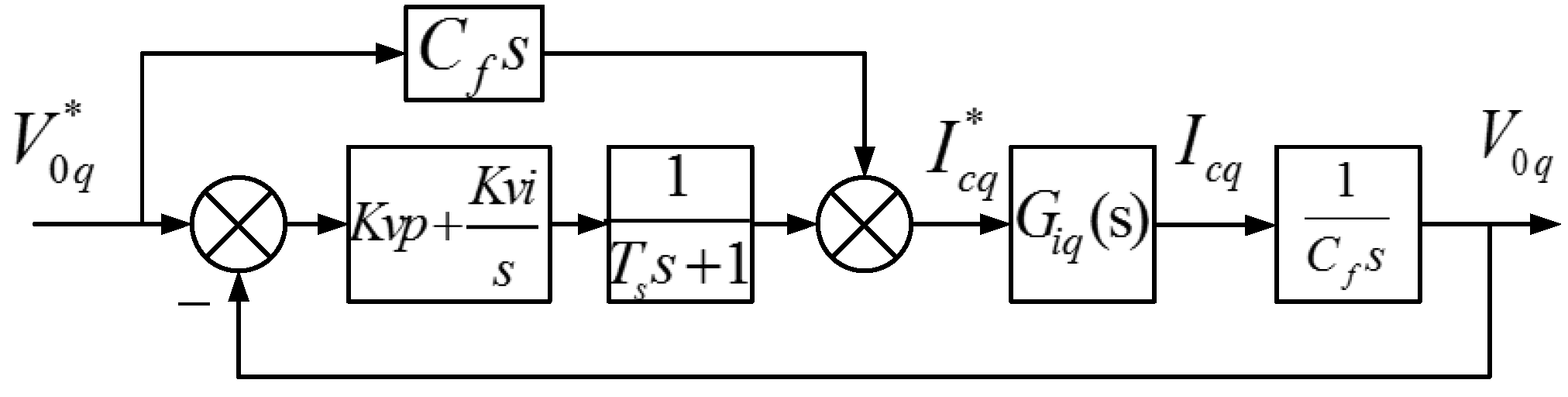
3.2. Inductive Droop Control
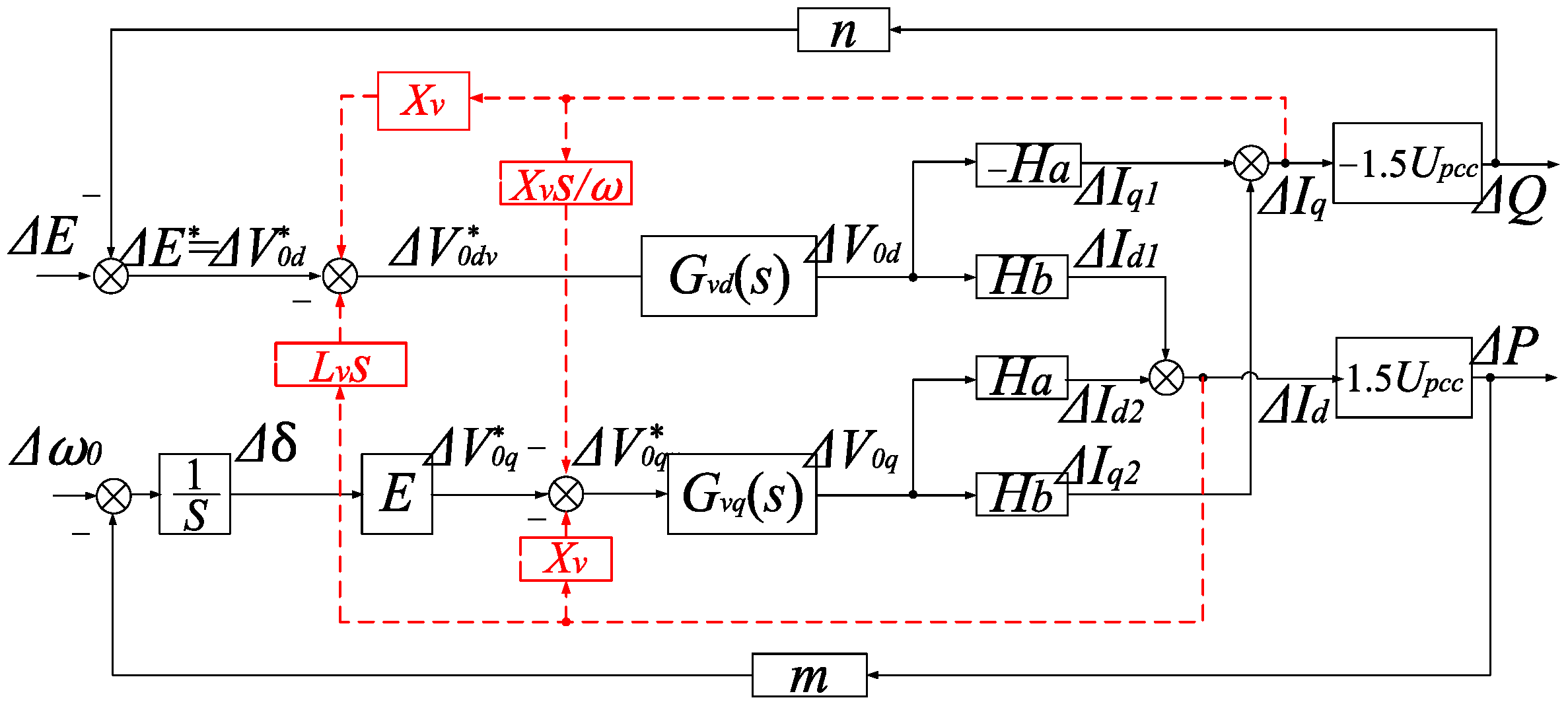
4. Small Signal Modeling of Three-Source MG
5. Simulation and Stability Analysis
5.1. Parameter Setting and Calculation
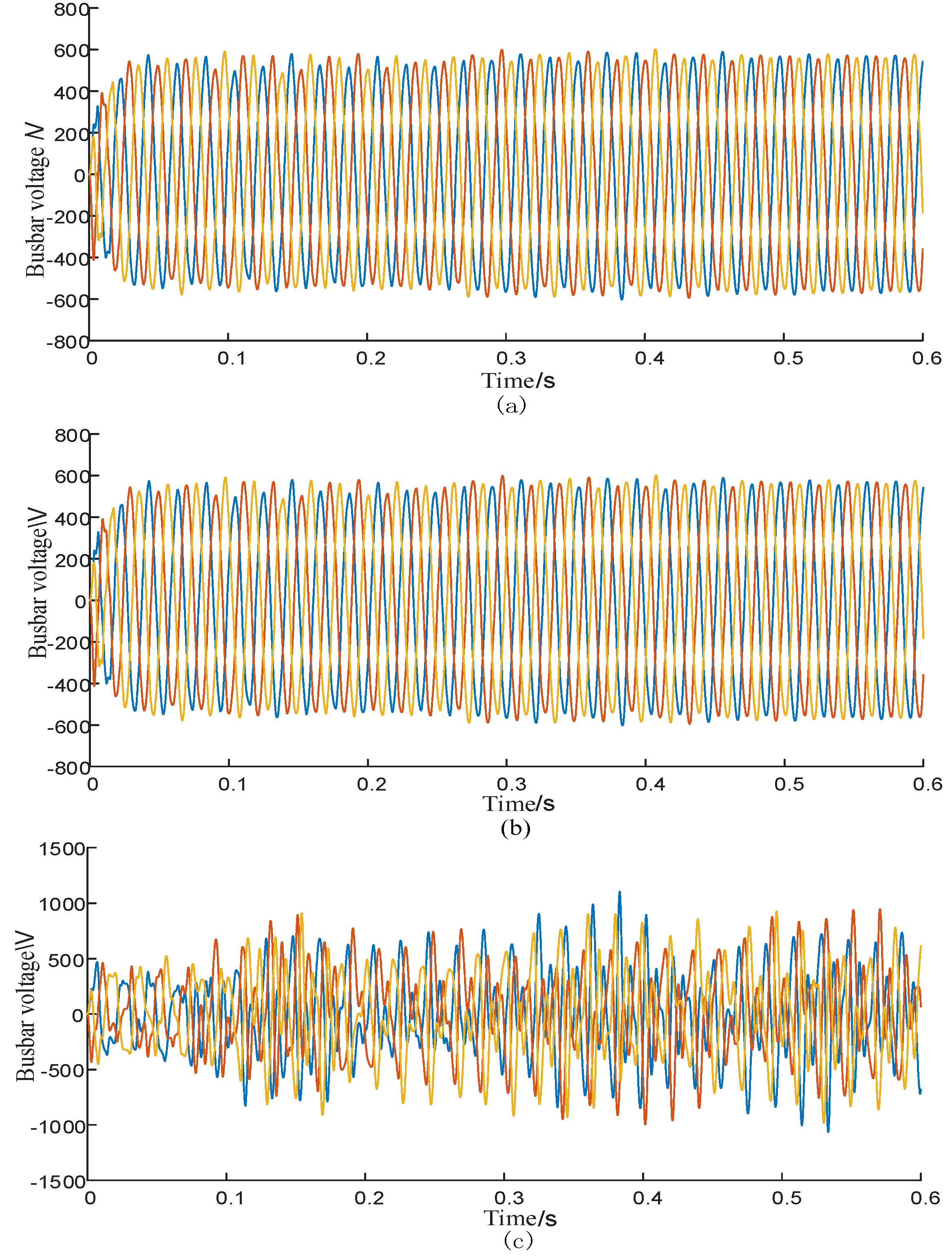
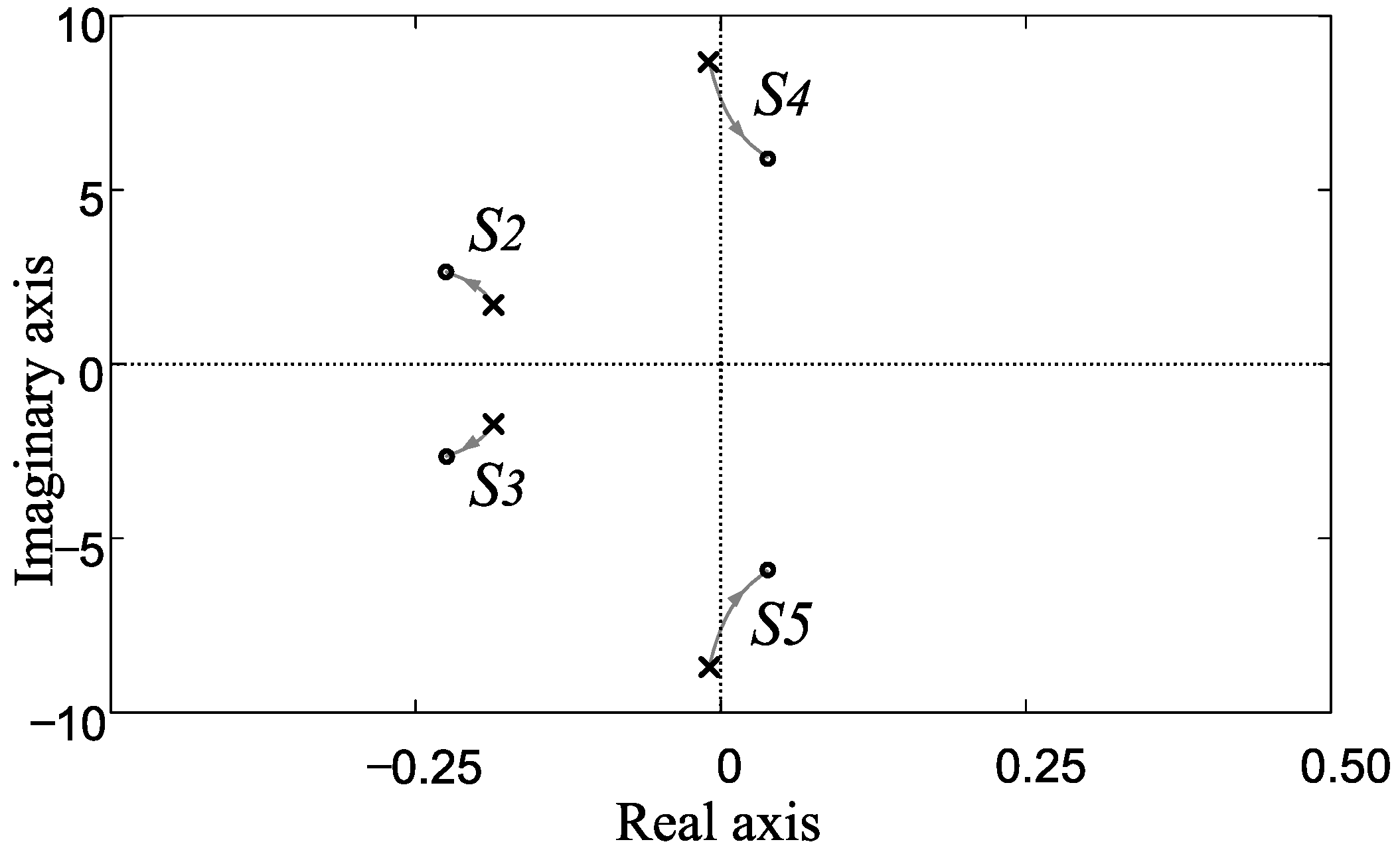
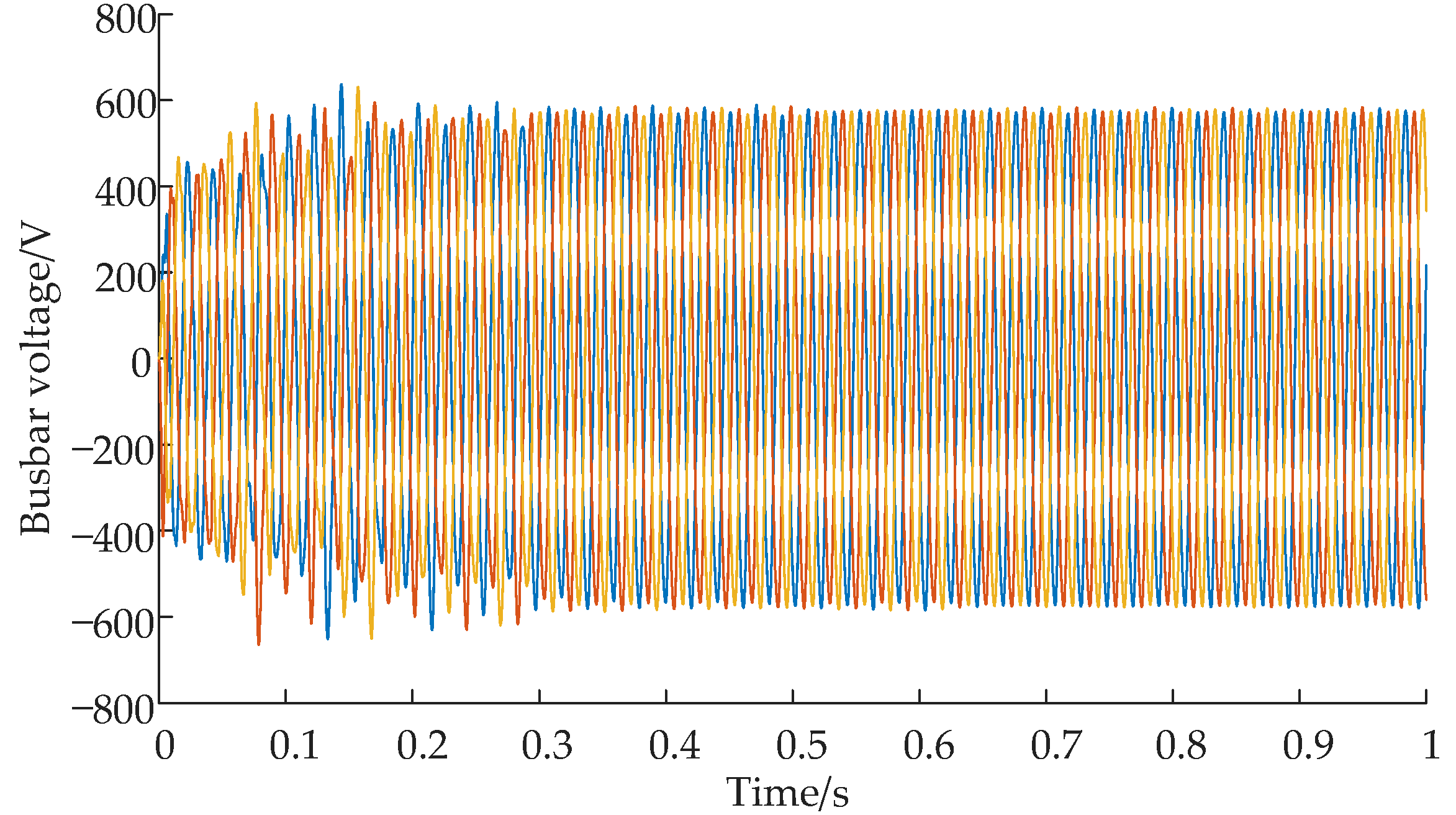
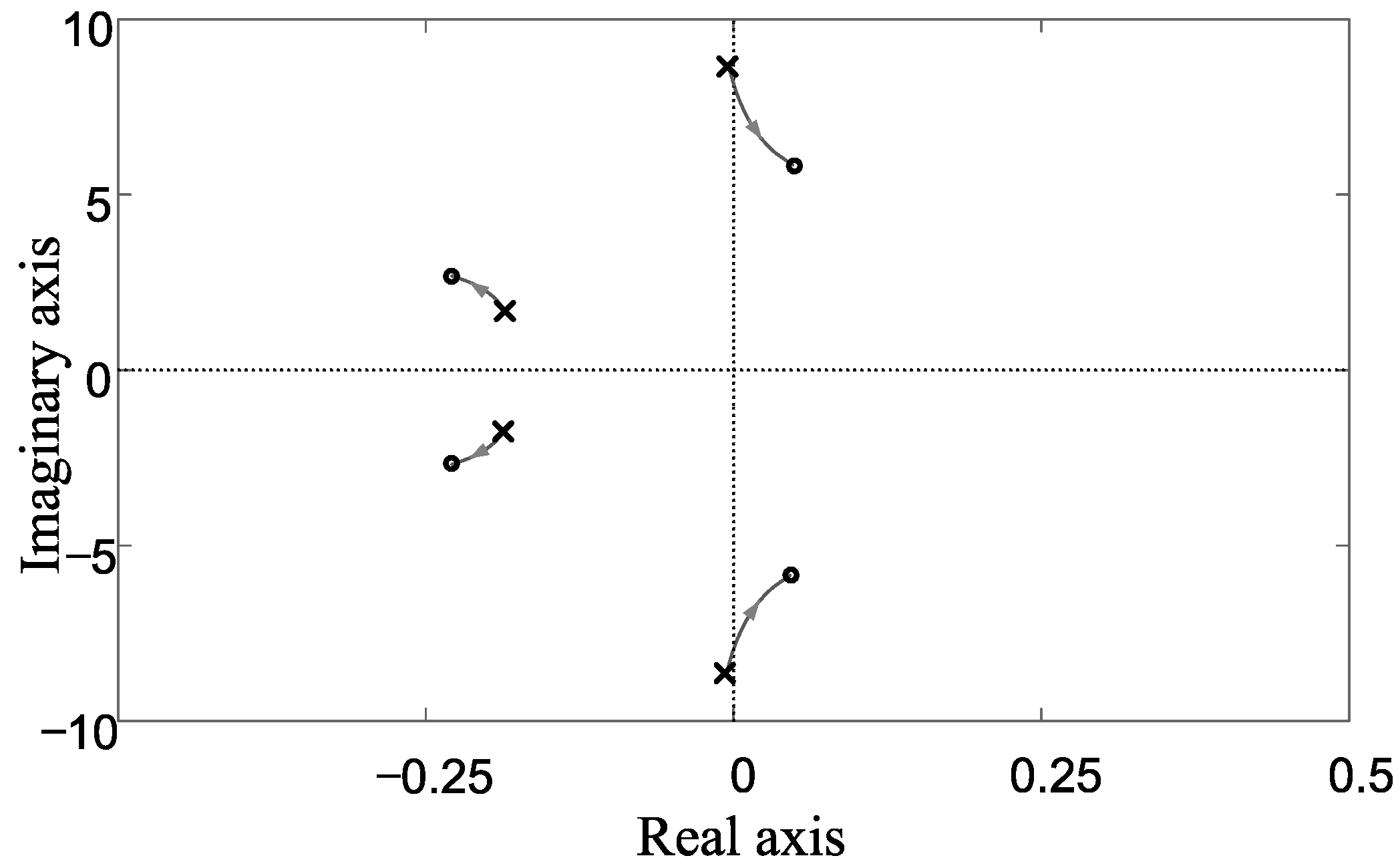
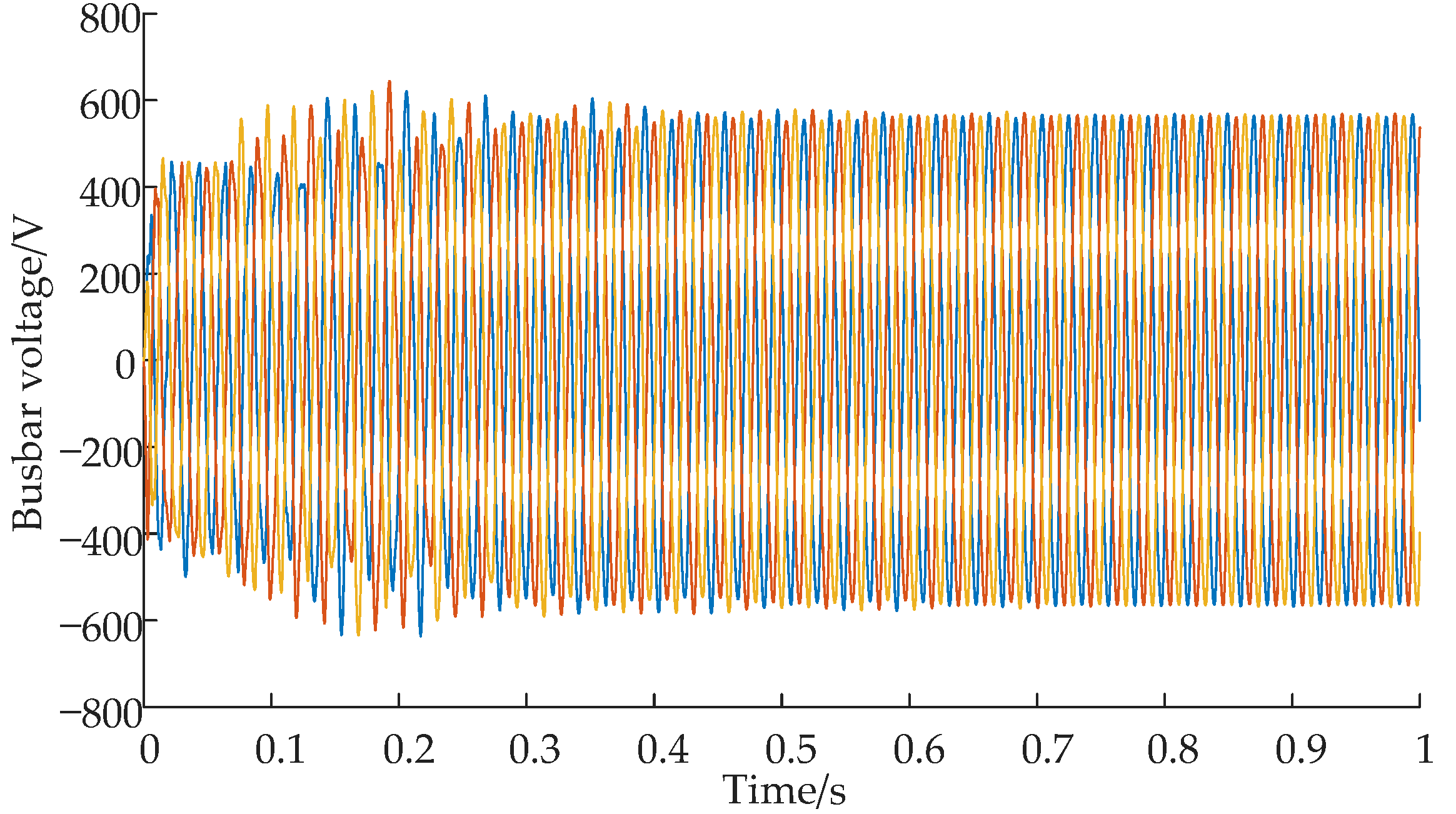
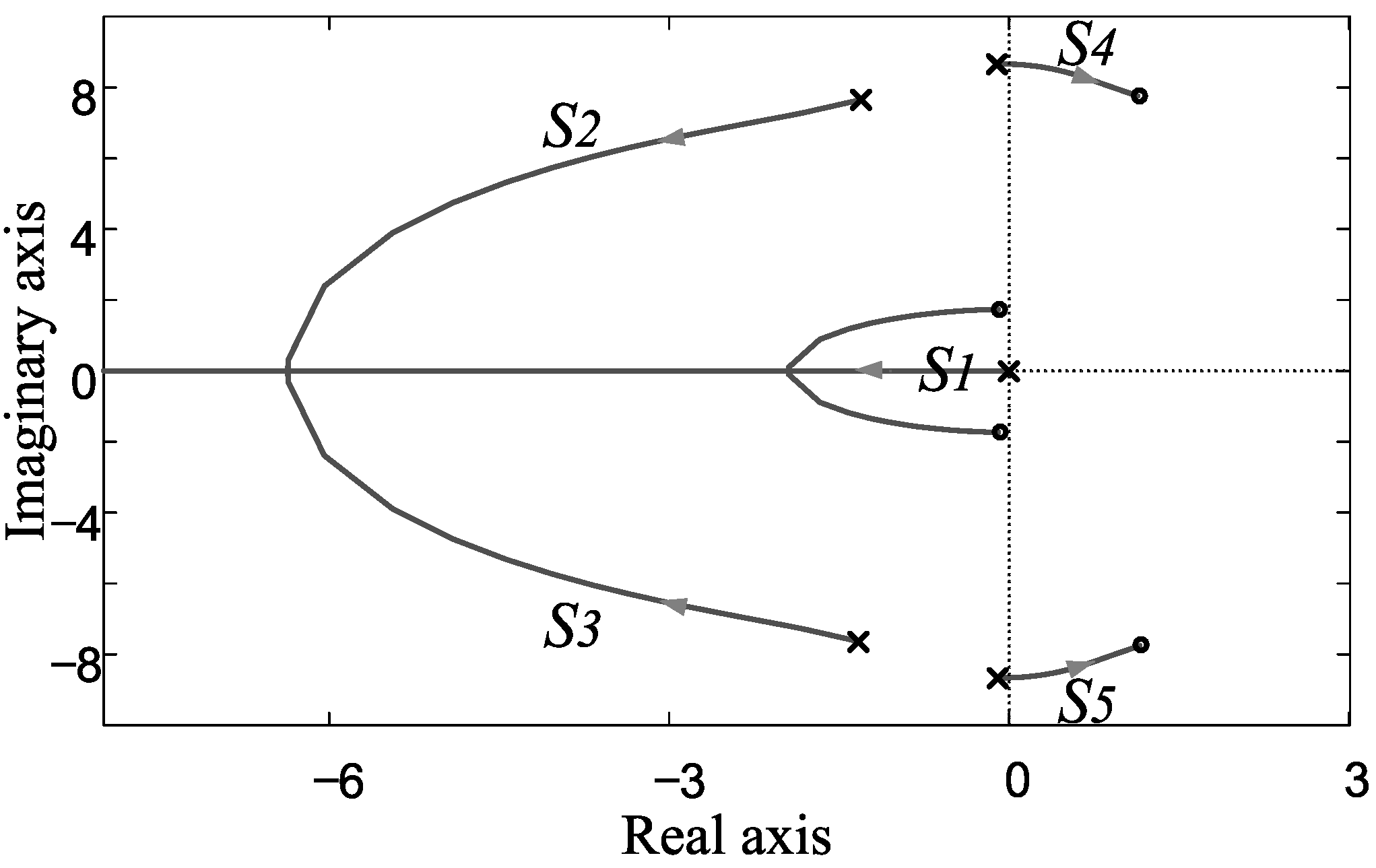
5.2. Influence of Active Droop Coefficient m1 and m2 on Stability
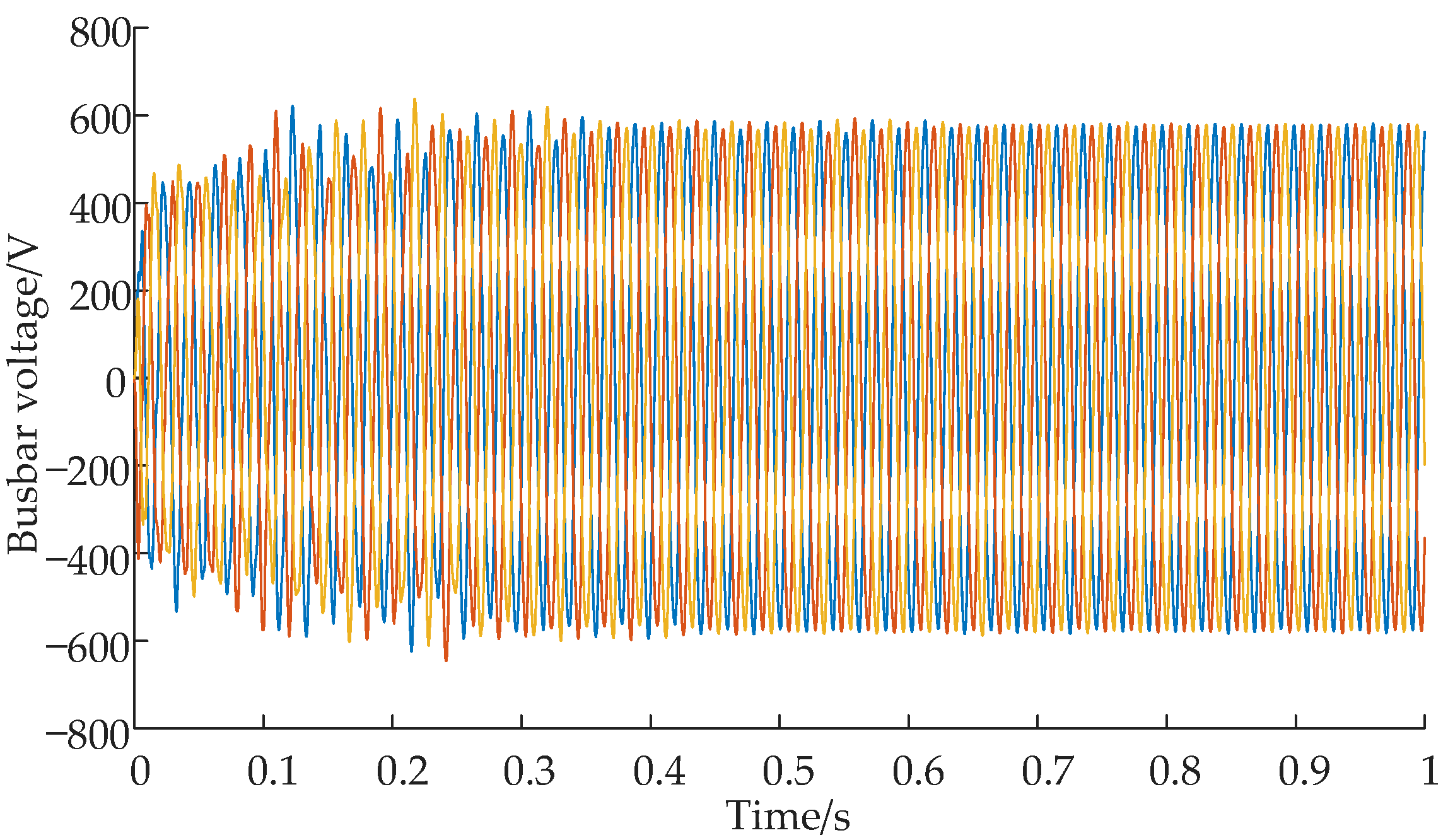
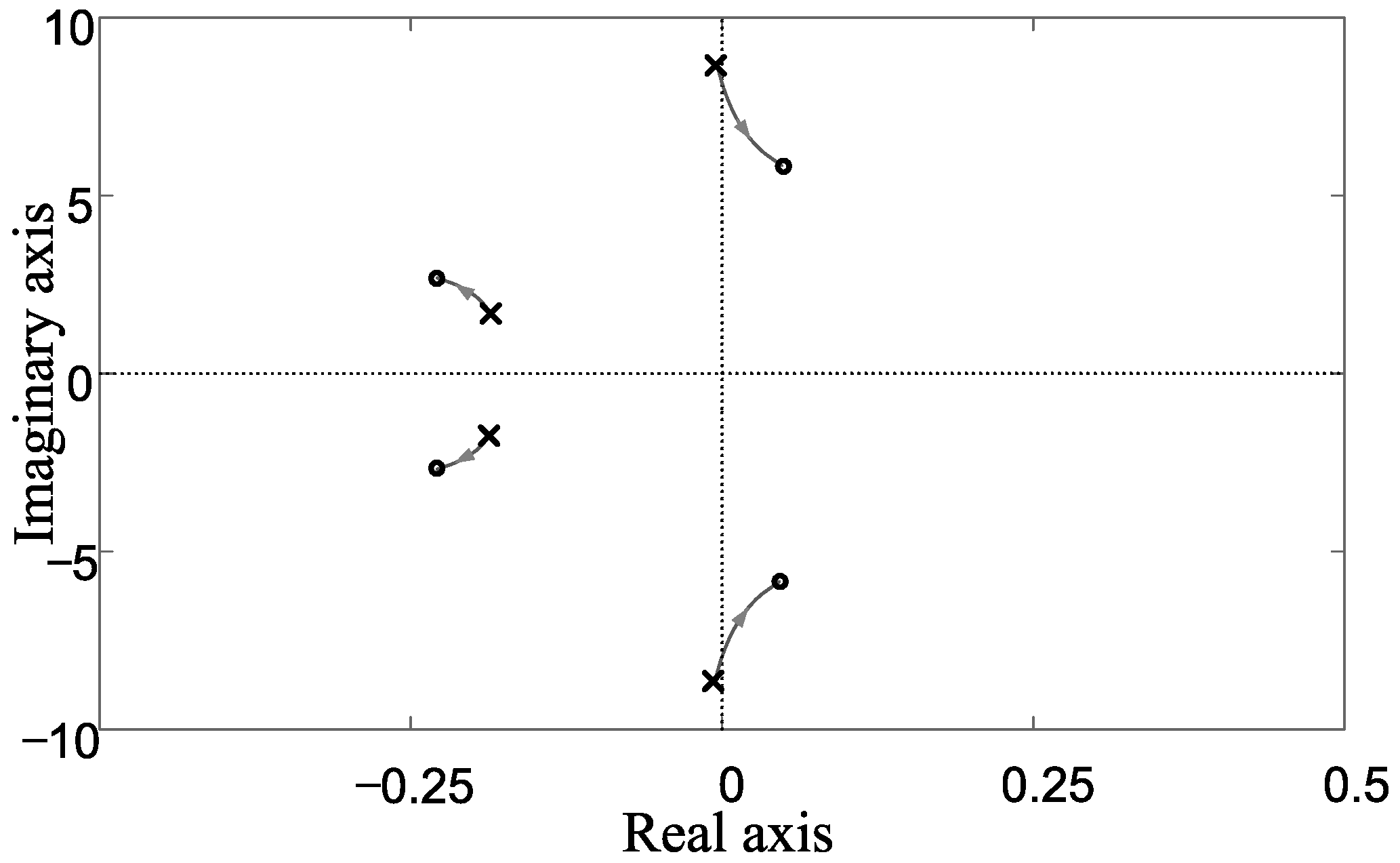
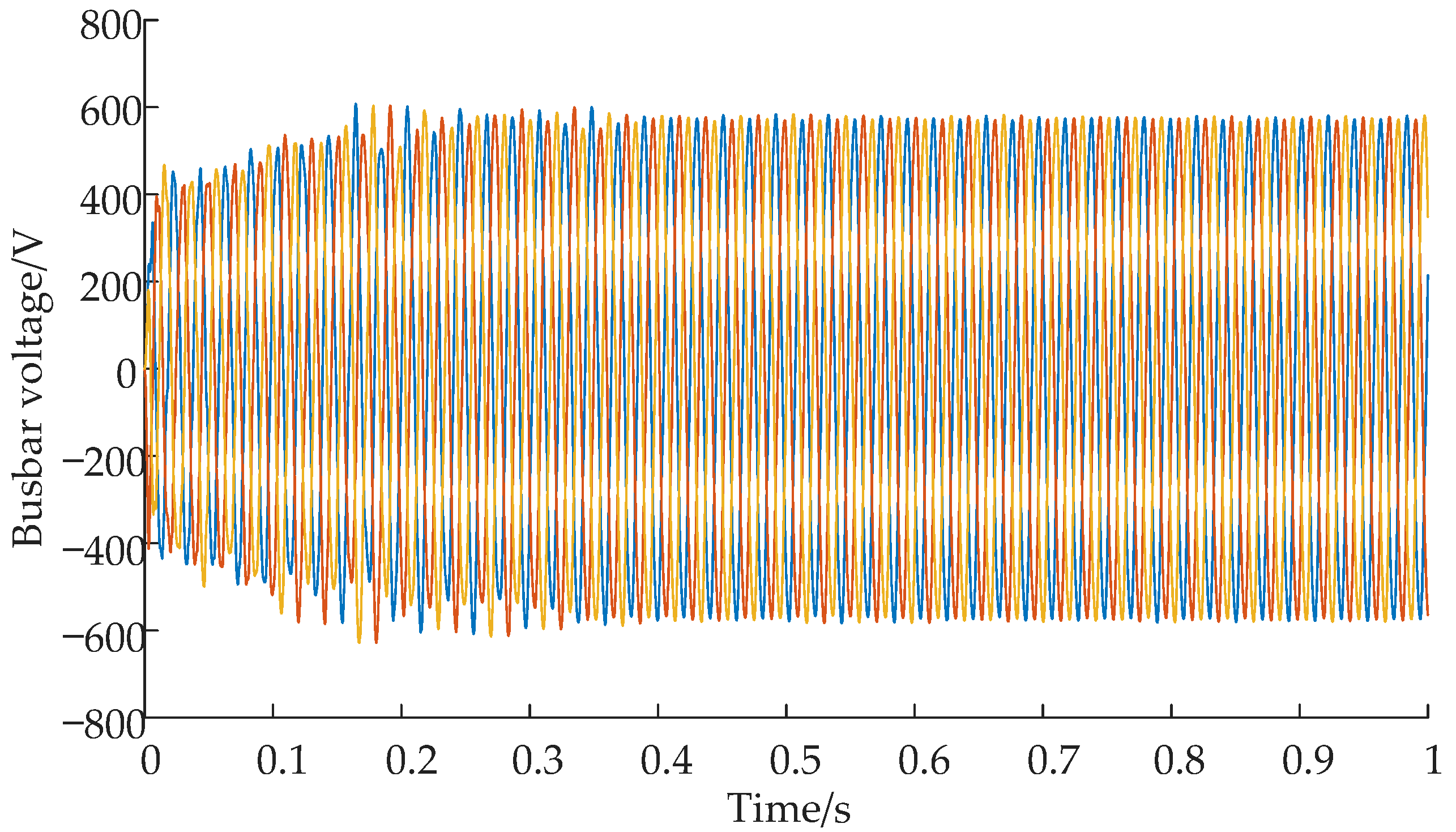
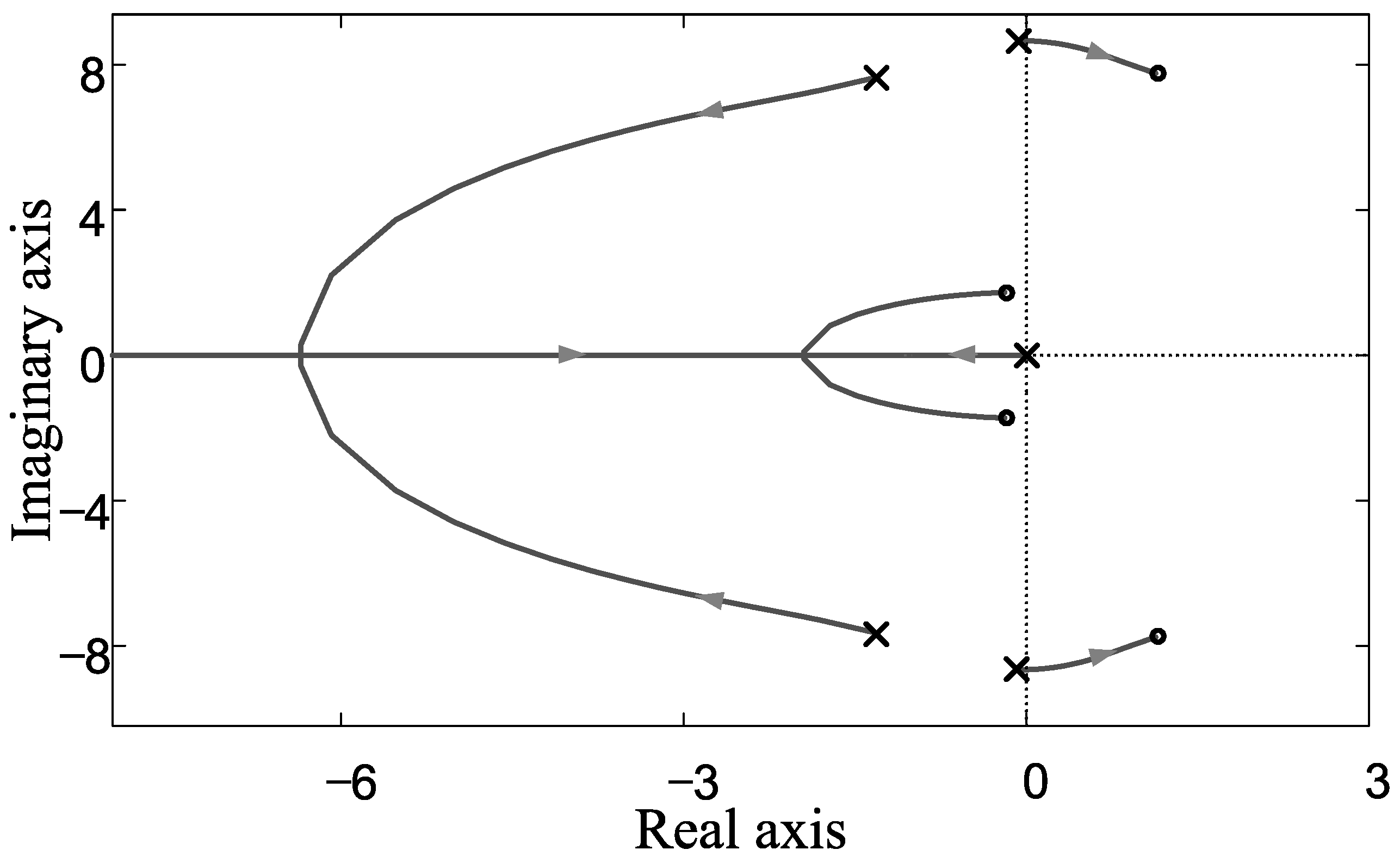
5.3. Influence of Reactive Droop Coefficient n1 and n2 on Stability
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meaning of Parameter | Symbol of Parameter | Value of Parameter |
|---|---|---|
| Voltage Level/V | E* | 311 |
| Reference value of active power/kW | P3* | 10 |
| Reference value of reactive power/kVar | Q3* | −10 |
| System switching frequency/kHz | fs | 20 |
| System sampling period/ms | Ts | 0.05 |
| Filter inductors/mH | Lf1 = Lf2 = Lf3 | 1.5 |
| Filter capacitors/μF | Cf1 = Cf2 = Cf3 | 20 |
| Line resistance of DG1 and DG2/Ω | R1, R2 | 0 |
| Line resistance of DG3/Ω | R3 | 0.2 |
| Load resistance/Ω | R4 | 3 |
| Line inductance of DG1 and DG2/Ω | X1 = X2 | 1.0 |
| Line inductance of DG3/Ω | X3 | 0.1 |
| Load inductance/Ω | X4 | 0 |
| Proportional coefficient of voltage loop | Kvp | 0.1 |
| Integral coefficient of voltage loop | Kvi | 400 |
| Proportional coefficient of current loop | Kip | 0.065 |
Appendix B
References
- Marzband, M.; Javadi, M.; Pourmousavi, S.A.; Lightbody, G. An advanced retail electricity market for active distribution systems and home microgrid interoperability based on game theory. Electr. Power Syst. Res. 2018, 157, 187–199. [Google Scholar] [CrossRef]
- Chendan, L.; Savaghebi, M.; Guerrero, J.M.; Coelho, E.A.; Vasquez, J.C. Operation cost minimization of droop-controlled AC microgrids using multiagent-based distributed control. Energies 2016, 9, 717. [Google Scholar] [CrossRef]
- Amoateng, D.O.; Hosani, M.A.; Moursi, M.S.E.; Turitsyn, K.; Kirtley, J.L. Adaptive voltage and frequency control of islanded multi-microgrids. IEEE Trans. Power Syst. 2017, 33, 4454–4465. [Google Scholar] [CrossRef]
- Kosari, M.; Hosseinian, S.H. Decentralized reactive power sharing and frequency restoration in islanded microgrid. IEEE Trans. Power Syst. 2017, 32, 2901–2912. [Google Scholar] [CrossRef]
- Divshali, P.H.; Hosseinian, S.H.; Abedi, M. A novel multi-stage fuel cost minimization in a VSC-based microgrid considering stability, frequency, and voltage constraints. IEEE Trans. Power Syst. 2013, 28, 931–939. [Google Scholar] [CrossRef]
- Bonfiglio, A.; Brignone, M.; Invernizzi, M.; Labella, A.; Mestriner, D.; Procopio, R. A simplified microgrid model for the validation of islanded control logics. Energies 2017, 10, 1141. [Google Scholar] [CrossRef]
- Guo, Q.; Cai, H.; Wang, Y.; Chen, W. Distributed secondary voltage control of islanded microgrids with event-triggered scheme. J. Power Electron. 2017, 17, 1650–1657. [Google Scholar]
- Farrokhabadi, M.; Cañizares, C.A.; Bhattacharya, K. Frequency control in isolated/islanded microgrids through voltage regulation. IEEE Trans. Smart Grid 2017, 8, 1185–1194. [Google Scholar] [CrossRef]
- Serban, I. A control strategy for microgrids: Seamless transfer based on a leading inverter with supercapacitor energy storage system. Appl. Energy 2018, 221, 490–507. [Google Scholar] [CrossRef]
- Lin, P.; Wang, P.; Xiao, J.; Wang, J.; Jin, C.; Tang, Y. An integral droop for transient power allocation and output impedance shaping of hybrid energy storage system in DC microgrid. IEEE Trans. Power Electron. 2017, 33, 6262–6277. [Google Scholar] [CrossRef]
- Etemadi, A.H.; Davison, E.J.; Iravani, R. A generalized decentralized robust control of islanded microgrids. IEEE Trans. Power Syst. 2014, 29, 3102–3113. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Herrera, L.; Inoa, E.; Guo, F.; Wang, J.; Tang, H. Small-signal modeling and networked control of a PHEV charging facility. IEEE Trans. Ind. Appl. 2014, 50, 1121–1130. [Google Scholar] [CrossRef]
- Zhu, M.; Li, H.; Li, X. Improved state-space model and analysis of islanding inverter-based microgrid. In Proceedings of the 2013 IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 28–31 May 2013; pp. 1–5. [Google Scholar]
- Makrygiorgou, D.I.; Alexandridis, A.T. Distributed stabilizing modular control for stand-alone microgrids. Appl. Energy 2018, 210, 925–935. [Google Scholar] [CrossRef]
- Wu, T.; Liu, Z.; Liu, J.; Liu, B.; Wang, S. Modeling and stability analysis of the small-AC-signal droop based secondary control for islanded microgrids. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016. [Google Scholar]
- Cao, W.; Ma, Y.; Yang, L.; Wang, F.; Tolbert, L.M. D-Q impedance based stability analysis and parameter design of three-phase inverter-based ac power systems. IEEE Trans. Ind. Electron. 2017, 64, 6017–6028. [Google Scholar] [CrossRef]
- Yu, Z.; Ai, Q.; He, X.; Piao, L. Adaptive droop control for microgrids based on the synergetic control of multi-agent systems. Energies 2016, 9, 1057. [Google Scholar] [CrossRef]
- Ghalebani, P.; Niasati, M. A distributed control strategy based on droop control and low-bandwidth communication in DC microgrids with increased accuracy of load sharing. Sustain. Cities Soc. 2018, 40, 155–164. [Google Scholar] [CrossRef]
- Khayamy, M.; Ojo, O. A power regulation and droop mode control method for a stand-alone load fed from a PV-current solurce inverter. Int. J. Emerg. Electr. Power Syst. 2015, 16, 83–91. [Google Scholar]
- Shuai, Z.; Shen, C.; Yin, X.; Liu, X.; Shen, Z.J. Fault analysis of inverter-interfaced distributed generators with different control schemes. IEEE Trans. Power Deliv. 2017, 33, 1223–1235. [Google Scholar] [CrossRef]
- Meng, X.; Liu, Z.; Liu, J.; Wu, T.; Wang, S.; Liu, B. A seamless transfer strategy based on special master and slave DGs. In Proceedings of the 2017 IEEE Future Energy Electronics Conference and Ecce Asia, Kaohsiung, Taiwan, 3–7 June 2017. [Google Scholar]
- Chen, H.; Xu, Z.; Zang, F. Nonlinear control for VSC based HVDC system. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006. [Google Scholar]
- Lang, H.; Yue, D.; Cao, D. Research on VSC-HVDC double closed loop controller based on variable universe fuzzy PID control. In Proceedings of the 2017 IEEE China International Electrical and Energy Conference, Beijing, China, 25–27 October 2017. [Google Scholar]
- Dou, C.; Zhang, Z.; Yue, D.; Song, M. Improved droop control based on virtual impedance and virtual power source in low-voltage microgrid. Iet Gener. Transm. Distrib. 2017, 11, 1046–1054. [Google Scholar] [CrossRef]
- Wu, X.; Shen, C.; Iravani, R. Feasible range and optimal value of the virtual impedance for droop-based control of microgrids. IEEE Trans. Smart Grid 2017, 8, 1242–1251. [Google Scholar] [CrossRef]
- Ramos-Fuentes, G.A.; Melo-Lagos, I.D.; Regino-Ubarnes, F.J. Odd harmonic high order repetitive control of single-phase PWM rectifiers: Varying frequency operation. Techno Lógicas 2016, 19, 63–76. [Google Scholar]
- Tripathi, R.N.; Singh, A.; Hanamoto, T. Design and control of LCL filter interfaced grid connected solar photovoltaic (SPV) system using power balance theory. Int. J. Electr. Power Energy Syst. 2015, 69, 264–272. [Google Scholar] [CrossRef]
- Shuai, Z.; Sun, Y.; Shen, Z.J.; Tian, W.; Tu, C.; Li, Y.; Yin, X. Microgrid stability: Classification and a review. Renew. Sustain. Energy Rev. 2016, 58, 167–179. [Google Scholar] [CrossRef]
- Coelho, E.A.A.; Cortizo, P.C.; Garcia, P.F.D. Small-signal stability for parallel-connected inverters in stand-alone AC supply systems. IEEE Trans. Ind. Appl. 2002, 38, 533–542. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. An accurate small-signal model of inverter-dominated islanded microgrids using dq reference frame. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 2, 1070–1080. [Google Scholar] [CrossRef]
- Ellabban, O.; Mierlo, J.V.; Lataire, P. A DSP-based dual-loop peak DC-link voltage control strategy of the Z-source inverter. IEEE Trans. Power Electron. 2012, 27, 4088–4097. [Google Scholar] [CrossRef]

| m2 (Hz/W) | Range of m1 (Hz/W) |
|---|---|
| 2.5 × 10−5 | [0, 7.21 × 10−5) |
| 5 × 10−5 | [0, 3.2 × 10−5) |
| 10 × 10−5 | [0, 2.9 × 10−5) |
| n2 (V/var) | Range of n1 (V/var) |
|---|---|
| 0.001 | [0, 0.00169) |
| 0.002 | [0, 0.00147) |
| 0.004 | [0, 0.00133) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Dong, Y.; Huang, Y.; Zheng, C.; Li, P. Modeling of Multiple Master–Slave Control under Island Microgrid and Stability Analysis Based on Control Parameter Configuration. Energies 2018, 11, 2223. https://doi.org/10.3390/en11092223
Liang H, Dong Y, Huang Y, Zheng C, Li P. Modeling of Multiple Master–Slave Control under Island Microgrid and Stability Analysis Based on Control Parameter Configuration. Energies. 2018; 11(9):2223. https://doi.org/10.3390/en11092223
Chicago/Turabian StyleLiang, Haifeng, Yue Dong, Yuxi Huang, Can Zheng, and Peng Li. 2018. "Modeling of Multiple Master–Slave Control under Island Microgrid and Stability Analysis Based on Control Parameter Configuration" Energies 11, no. 9: 2223. https://doi.org/10.3390/en11092223
APA StyleLiang, H., Dong, Y., Huang, Y., Zheng, C., & Li, P. (2018). Modeling of Multiple Master–Slave Control under Island Microgrid and Stability Analysis Based on Control Parameter Configuration. Energies, 11(9), 2223. https://doi.org/10.3390/en11092223