Online Energy Management and Heterogeneous Task Scheduling for Smart Communities with Residential Cogeneration and Renewable Energy



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
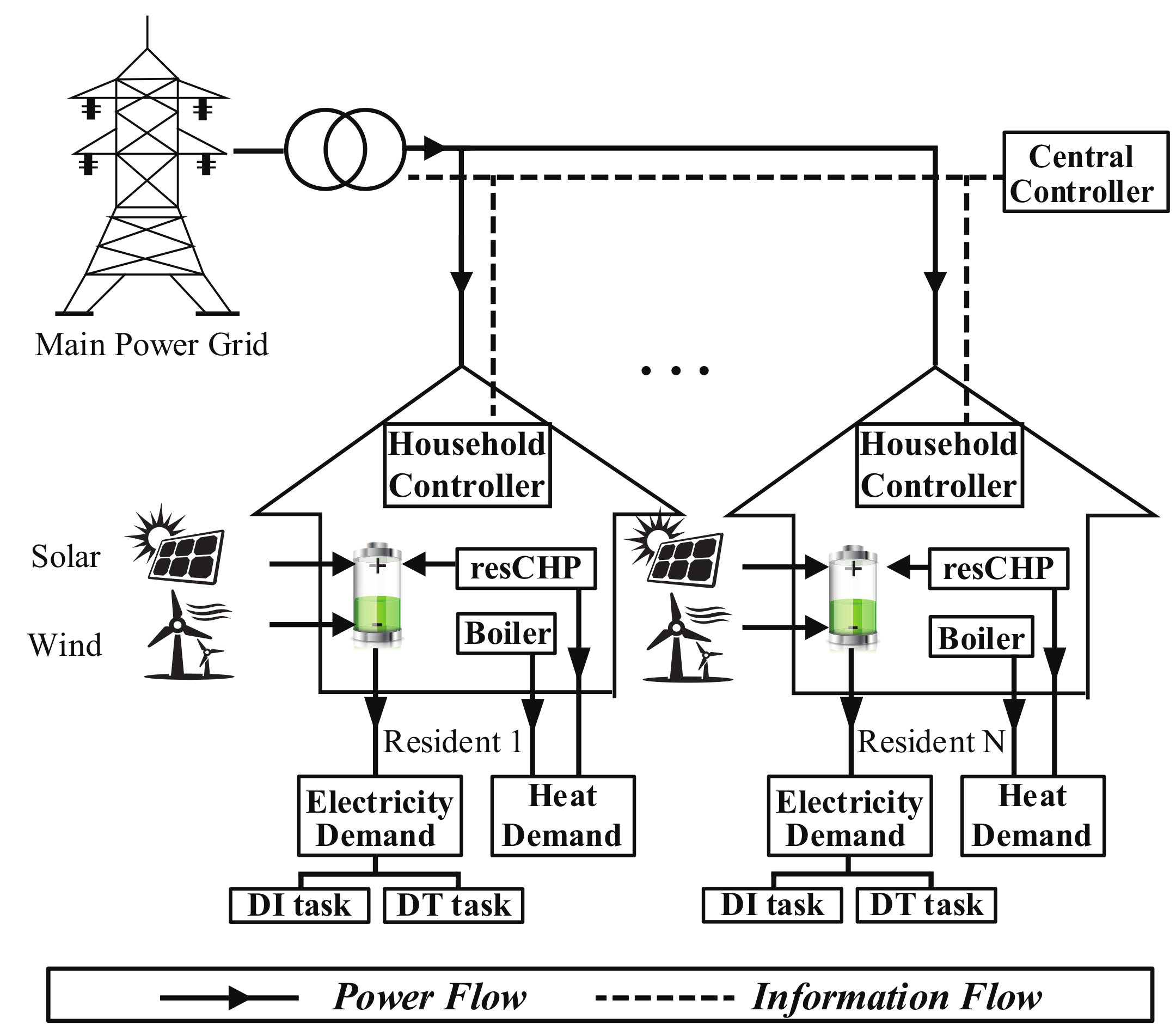
- We propose a practical integrated model that has a resCHP system, a renewable energy device, an energy storage (battery) and a boiler for each residence in the community, extending from other models. Our aim to minimize the time-average cost of the total community, including the cost from the external grid and the gas station. In each residence, we study two cases that is not considered in other models: one has delay intolerant (DI) tasks and the other has delay tolerant (DT) tasks.
- We firstly formulate a cost-optimal problem of one residence in a non-cooperative community in order to reduce the total cost with the constraints of DI and DT tasks. Then, we present an online Task Scheduling Algorithm (TSA) by the Lyapunov optimization approach, which needs no future data and has low computational complexity. Because it is difficult to separate variables, we use a standard primal-dual gradient method to figure out a solution of the problem. For less cost, we propose an energy sharing policy for cooperative energy sharing in the community. By using this policy, we design a cooperative renewable energy sharing algorithm based on a Sarsa algorithm, on the condition that each residence in the community needs to communicate with its neighbors by a central controller.
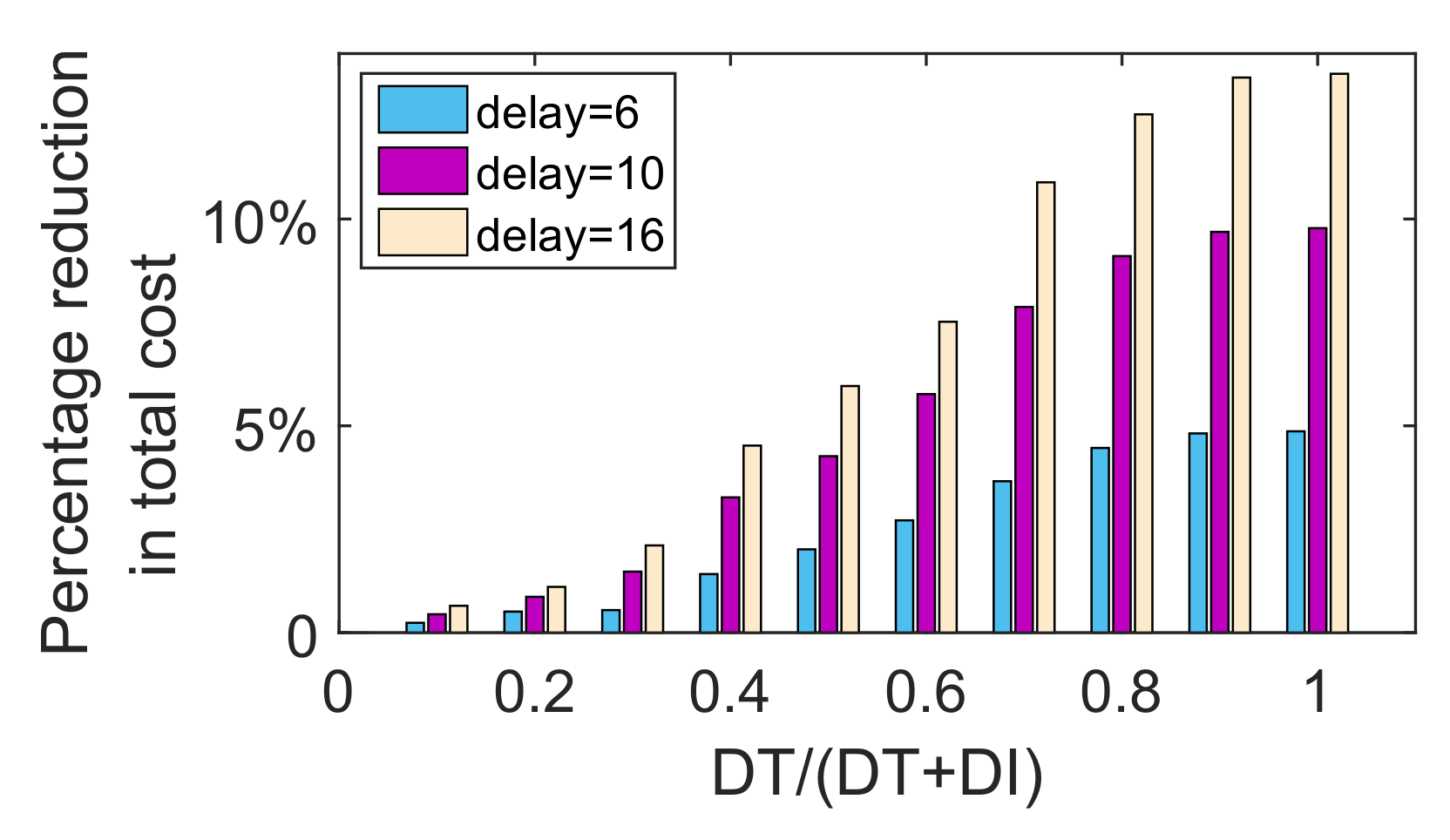
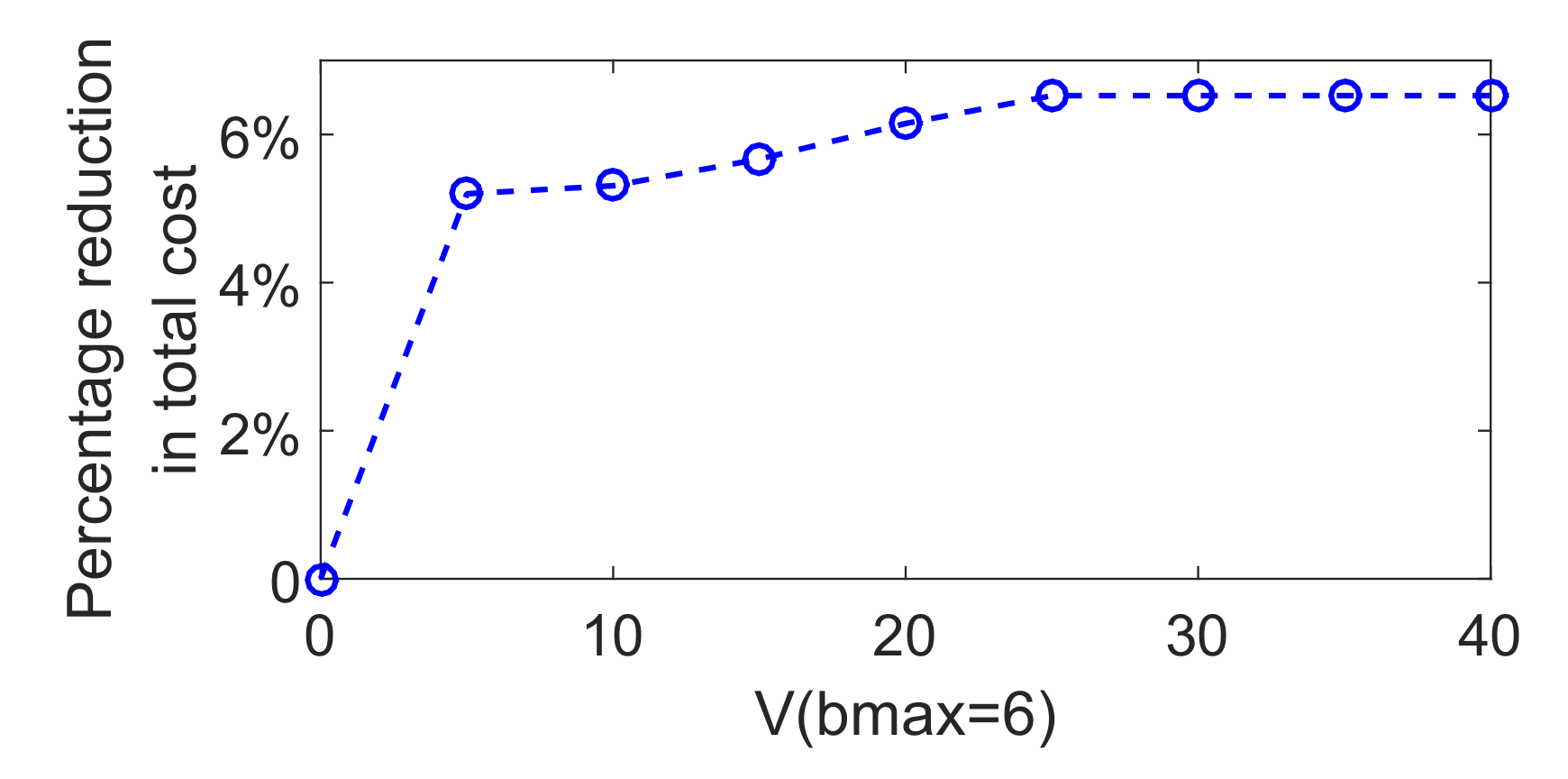
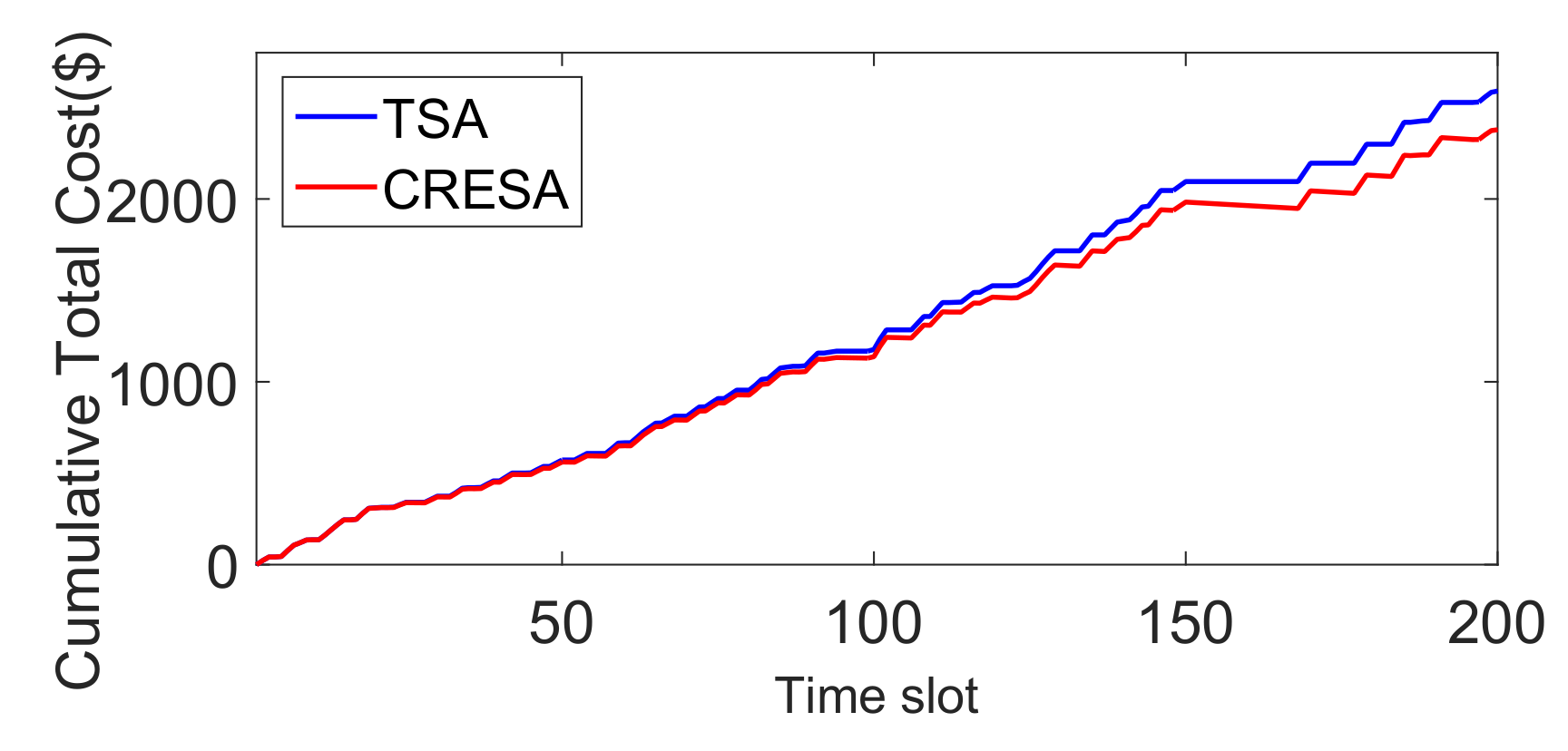
- Extensive simulations are presented to validate the proposed algorithms by using real trace data. The TSA algorithm shows that a larger battery maximum output and V will lead to a higher shaved cost. We satisfy the DT load demand before user-defined deadlines and we can see that, with the increase of the deadline, the saved cost will increase. Compared with the TSA Algorithm (non-cooperative algorithm), the cooperative renewable energy sharing algorithm can reduce a nearly 9% cost for the community while meeting all the demands of the residents.
2. Related Work
3. System Model and Problem Statement
3.1. System Architecture
3.2. Renewables Generation
3.3. Electricity and Heat Demand
3.4. Delay-Tolerant and Delay-Intolerant Tasks
3.5. Energy Storage
3.6. Energy Sharing Policy
3.7. Control Target
4. Problem Formulation
4.1. The Lower Bound of the Minimum Cost
4.2. TSA: Task Scheduling Algorithm
- (i)
- if , when and , we will have the maximum of the increased electricity. Therefore, we will have .
- (ii)
- if , we can know that according to Equation (23), that is to say, battery discharges. Thus, we have . Above all, we can prove that .
- (i)
- if , we can know that according to Equation (23), that is to say, battery charges. Therefore, we have .
- (ii)
- if , we have . According to Equations (3) and (4), we have . Above all, we can prove that .
4.3. Cooperative Renewable Energy Sharing Algorithm
| Algorithm 1 Cooperative Renewable Energy Sharing Algorithm (CRESA) |
|
5. Numeric Performance
5.1. Parameter-Settings for the Dynamic Simulation
5.2. Performance Evaluation
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| i | Index of tasks of residence j |
| j | Index of residence |
| t | Index of time slots |
| Efficiency of solar energy to electricity | |
| Efficiency of wind energy to electricity | |
| Air density | |
| Solar radiation in time slot t | |
| Wind speed in time slot t | |
| Electricity charged or discharged in battery for residence j | |
| Battery capacity for residence j | |
| Actual electricity stored in the battery in time slot t for residence j | |
| Natural gas consumed by the resCHP system for residence j | |
| Natural gas consumed by the boiler for residence j | |
| Electricity price in time slot t | |
| Electricity drawn from the grid in time slot t | |
| Delay for task i of residence j | |
| Required service time for task i of residence j | |
| Deadline for task i of residence j | |
| Electricity demand in time slot t | |
| Heat demand in time slot t | |
| Battery level in time slot t | |
| Electricity consumption for task of residence i | |
| Dissatisfaction function of task i for delay s | |
| Natural gas price | |
| Efficiency of converting natural gas to electricity | |
| Efficiency of converting natural gas to heat in the resCHP system | |
| Efficiency of converting natural gas to heat consumed by the boiler | |
| Efficiency of converting renewable energy to electricity |
References
- Farhangi, H. The path of the smart grid. IEEE Power Energy Mag. 2010, 8, 18–28. [Google Scholar] [CrossRef]
- Niakolas, D.; Daletou, M.; Neophytides, S.; Vayenas, C. Fuel cells are a commercially viable alternative for the production of “clean” energy. Ambio 2016, 45, 32–37. [Google Scholar] [CrossRef] [PubMed]
- Denholm, P.; Ela, E.; Kirby, B.; Milligan, M. Role of Energy Storage with Renewable Electricity Generation. Off. Sci. Tech. Inf. Tech. Rep. 2010, 48, 563–575. [Google Scholar]
- Li, T.; Dong, M. Real-Time Residential-Side Joint Energy Storage Management and Load Scheduling with Renewable Integration. IEEE Trans. Smart Grid 2018, 9, 283–298. [Google Scholar] [CrossRef]
- Yu, L.; Jiang, T.; Zou, Y. Distributed Real-Time Energy Management in Data Center Microgrids. IEEE Trans. Smart Grid 2018, 9, 3748–3762. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, R.; Zhang, Y.; Wu, G.; Shi, J. An Optimal and Distributed Demand Response Strategy for Energy Internet Management. Energies 2018, 11, 215. [Google Scholar] [CrossRef]
- Ou, T. Design of a Novel Voltage Controller for Conversion of Carbon Dioxide into Clean Fuels Using the Integration of a Vanadium Redox Battery with Solar Energy. Energies 2018, 11, 524. [Google Scholar] [CrossRef]
- Ou, T.; Hong, C. Dynamic operation and control of microgrid hybrid power systems. Energy 2014, 66, 314–323. [Google Scholar] [CrossRef]
- Hong, C.; Ou, T.; Lu, K. Development of intelligent MPPT (maximum power point tracking) control for a grid-connected hybrid power generation system. Energy 2013, 50, 270–279. [Google Scholar] [CrossRef]
- Bui, V.; Hussain, A.; Kim, H. Optimal Operation of Microgrids Considering Auto-Configuration Function Using Multiagent System. Energies 2017, 10, 1484. [Google Scholar] [CrossRef]
- Ou, T. A novel unsymmetrical faults analysis for microgrid distribution systems. Int. J. Electr. Power Energy Syst. 2012, 43, 1017–1024. [Google Scholar] [CrossRef]
- Ou, T. Ground fault current analysis with a direct building algorithm for microgrid distribution. Int. J. Electr. Power Energy Syst. 2013, 53, 867–875. [Google Scholar] [CrossRef]
- Zhang, Y.; Gatsis, N.; Giannakis, G. Robust Energy Management for Microgrids With High-Penetration Renewables. IEEE Trans. Sustain. Energy 2013, 4, 944–953. [Google Scholar] [CrossRef]
- Ou, T.; Lu, K.; Huang, C. Improvement of Transient Stability in a Hybrid Power Multi-System Using a Designed NIDC (Novel Intelligent Damping Controller). Energies 2017, 10, 488. [Google Scholar] [CrossRef]
- Mane, S.; Mejari, M.; Kazi, F.; Singh, N. Improving Lifetime of Fuel Cell in Hybrid Energy Management System by Lure-Lyapunov-Based Control Formulation. IEEE Trans. Ind. Electron. 2017, 64, 6671–6679. [Google Scholar] [CrossRef]
- Bahrami, S.; Sheikhi, A. From Demand Response in Smart Grid Toward Integrated Demand Response in Smart Energy Hub. IEEE Trans. Smart Grid 2016, 7, 650–658. [Google Scholar] [CrossRef]
- Mohammadi, A.; Dehghani, M.; Ghazizadeh, E. Game Theoretic Spectrum Allocation in Femtocell Networks for Smart Electric Distribution Grids. Energies 2018, 11, 1635. [Google Scholar] [CrossRef]
- Albadi, M.; El-Saadany, E. Demand Response in Electricity Markets: An Overview. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; Volume 14, pp. 1–5. [Google Scholar]
- Lu, N.; Zhang, Y. Design considerations of a centralized load controller using thermostatically controlled appliances for continuous regulation reserves. IEEE Trans. Smart Grid 2013, 4, 914–921. [Google Scholar] [CrossRef]
- Ramchurn, S.; Vytelingum, P.; Rogers, A.; Jennings, N. Agent-based control for decentralised demand side management in the smart grid. In Proceedings of the International Conference on Autonomous Agents and Multiagent Systems, Taipei, Taiwan, 2–6 May 2011; Volume 1, pp. 5–12. [Google Scholar]
- Alipour, M.; Mohammadi-Ivatloo, M.; Zare, K. Stochastic Scheduling of Renewable and CHP-Based Microgrids. IEEE Trans. Ind. Inform. 2015, 11, 1049–1058. [Google Scholar] [CrossRef]
- Motevasel, M.; Seifi, A.; Niknam, T. Multi-objective energy management of CHP (combined heat and power)-based micro-grid. Energy 2013, 51, 123–136. [Google Scholar] [CrossRef]
- Tasdighi, M.; Ghasemi, H.; Rahimi-Kian, A. Residential Microgrid Scheduling Based on Smart Meters Data and Temperature Dependent Thermal Load Modeling. IEEE Trans. Smart Grid 2014, 5, 349–357. [Google Scholar] [CrossRef]
- Ma, L.; Liu, N.; Zhang, J.; Tushar, W.; Yuen, C. Energy Management for Joint Operation of CHP and PV Prosumers Inside a Grid-Connected Microgrid: A Game Theoretic Approach. IEEE Trans. Ind. Inform. 2016, 12, 1930–1942. [Google Scholar] [CrossRef]
- Bertsekas, D. Dynamic Programming and Optimal Control; Athena Scientific: Nashua, NH, USA, 2007. [Google Scholar]
- Goudarzi, H.; Hatami, S.; Pedram, M. Demand-side load scheduling incentivized by dynamic energy prices. In Proceedings of the IEEE International Conference on Smart Grid Communications, Brussels, Belgium, 17–20 October 2011; pp. 351–356. [Google Scholar]
- Buttazzo, G.; Bertogna, M.; Yao, G. Limited Preemptive Scheduling for Real-Time Systems. A Survey. IEEE Trans. Ind. Inform. 2013, 9, 3–15. [Google Scholar] [CrossRef]
- Pengwei, D.; Ning, L. Appliance Commitment for Household Load Scheduling. IEEE Trans. Smart Grid 2011, 2, 411–419. [Google Scholar]
- Zhou, K.; Pan, J.; Cai, L. Optimal Combined Heat and Power system scheduling in smart grid. In Proceedings of the IEEE INFOCOM, Toronto, ON, Canada, 27 April–2 May 2014; pp. 2831–2839. [Google Scholar]
- Neely, M.; Tehrani, A.; Dimakis, A. Efficient algorithms for renewable energy allocation to delay tolerant consumers. In Proceedings of the IEEE International Conference on Smart Grid Communications, Gaithersburg, MD, USA, 4–6 October 2010; pp. 549–554. [Google Scholar]
- Guo, Y.; Pan, M.; Fang, Y. Optimal power management of residential customers in the smart grid. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 1593–1606. [Google Scholar] [CrossRef]
- Urgaonkar, R.; Urgaonkar, B.; Neely, M.; Sivasubramaniam, A. Optimal power cost management using stored energy in data centers. In Proceedings of the ACM SIGMETRICS Joint International Conference on Measurement and Modeling of Computer Systems, San Jose, CA, USA, 7–11 June 2011; pp. 221–232. [Google Scholar]
- Liu, Y.; Yuen, C.; Zhang, Y.; Xie, S. Queuing-Based Energy Consumption Management for Heterogeneous Residential Demands in Smart Grid. IEEE Trans. Smart Grid 2016, 7, 1650–1659. [Google Scholar] [CrossRef]
- Gatsis, N.; Giannakis, G. Residential Load Control: Distributed Scheduling and Convergence With Lost AMI Messages. IEEE Trans. Smart Grid 2012, 3, 770–786. [Google Scholar] [CrossRef]
- Logenthiran, T.; Srinivasan, D.; Tan, Z. Demand Side Management in Smart Grid Using Heuristic Optimization. IEEE Trans. Smart Grid 2012, 3, 1244–1252. [Google Scholar] [CrossRef]
- Koutitas, G.; Tassiulas, L. A delay based optimization scheme for peak load reduction in the smart grid. In Proceedings of the 2012 Third International Conference on Future Systems: Where Energy, Computing and Communication Meet (e-Energy), Madrid, Spain, 9–11 May 2012; pp. 1–4. [Google Scholar]
- Pacific Gas and Electric Company. Available online: http://www.pge.com/nots/rates/tariffs/rateinfo.shtml (accessed on 24 June 2017).
- RateFinder for JUN 2017 of Pacific Gas and Electric Company. Available online: https://www.pge.com/nots/rates/tariffs/GRF0617.pdf (accessed on 24 June 2017).
- Bhandari, B.; Poudel, S.; Lee, K. Mathematical modeling of hybrid renewable energy system: A review on small hydro-solar-wind power generation. Int. J. Precis. Eng. Manuf. Green Technol. 2014, 1, 157–173. [Google Scholar] [CrossRef]
- Mao, Z.; Koksal, C.; Shroff, N. Near optimal power and rate control of multi-hop sensor networks with energy replenishment: Basic limitations with finite energy and data storage. IEEE Trans. Autom. Control 2012, 57, 815–829. [Google Scholar]
- Chen, S.; Shroff, N.; Sinha, P. Heterogeneous Delay Tolerant Task Scheduling and Energy Management in the Smart Grid withRenewable Energy. IEEE J. Sel. Areas Commun. 2013, 31, 1258–1267. [Google Scholar] [CrossRef]
- Stochastic Network Optimization with Application to Communication and Queueing Systems. Available online: https://ieeexplore.ieee.org/xpl/abstractRecent.jsp?reload=true&bkn=6813406 (accessed on 24 June 2017).
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Feijer, D.; Paganini, F. Stability of primal-dual gradient dynamics and applications to network optimization. Automatica 2010, 46, 1974–1981. [Google Scholar] [CrossRef]
- Ye, G.; Li, G.; Wu, D.; Chen, X. Towards Cost Minimization with Renewable Energy Sharing in Cooperative Residential Communities. IEEE Access 2017, 5, 11688–11699. [Google Scholar] [CrossRef]
- Deng, X.; Wu, D.; Shen, J. Eco-aware online power management and load scheduling for green cloud datacenters. IEEE Syst. J. 2016, 10, 78–87. [Google Scholar] [CrossRef]
- NREL Solar Radiation Research Laboratory. Available online: http://www.nrel.gov/midc/srrl_bms/ (accessed on 5 June 2017).
- National Wind Technology Center. Available online: http://www.nrel.gov/midc/nwtc_m2/ (accessed on 5 June 2017).
- Cao, Y.; Zhang, G.; Li, D.; Wang, L. Online Energy Management and Heterogeneous Task Scheduling for Smart Communities. In Proceedings of the IEEE Global Communications Conference, Abu Dhabi, UAE, 9–13 December 2018. [Google Scholar]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Zhang, G.; Li, D.; Wang, L.; Li, Z. Online Energy Management and Heterogeneous Task Scheduling for Smart Communities with Residential Cogeneration and Renewable Energy. Energies 2018, 11, 2104. https://doi.org/10.3390/en11082104
Cao Y, Zhang G, Li D, Wang L, Li Z. Online Energy Management and Heterogeneous Task Scheduling for Smart Communities with Residential Cogeneration and Renewable Energy. Energies. 2018; 11(8):2104. https://doi.org/10.3390/en11082104
Chicago/Turabian StyleCao, Yongsheng, Guanglin Zhang, Demin Li, Lin Wang, and Zongpeng Li. 2018. "Online Energy Management and Heterogeneous Task Scheduling for Smart Communities with Residential Cogeneration and Renewable Energy" Energies 11, no. 8: 2104. https://doi.org/10.3390/en11082104
APA StyleCao, Y., Zhang, G., Li, D., Wang, L., & Li, Z. (2018). Online Energy Management and Heterogeneous Task Scheduling for Smart Communities with Residential Cogeneration and Renewable Energy. Energies, 11(8), 2104. https://doi.org/10.3390/en11082104