3D Simulation of a Loss of Vacuum Accident (LOVA) in ITER (International Thermonuclear Experimental Reactor): Evaluation of Static Pressure, Mach Number, and Friction Velocity



Abstract
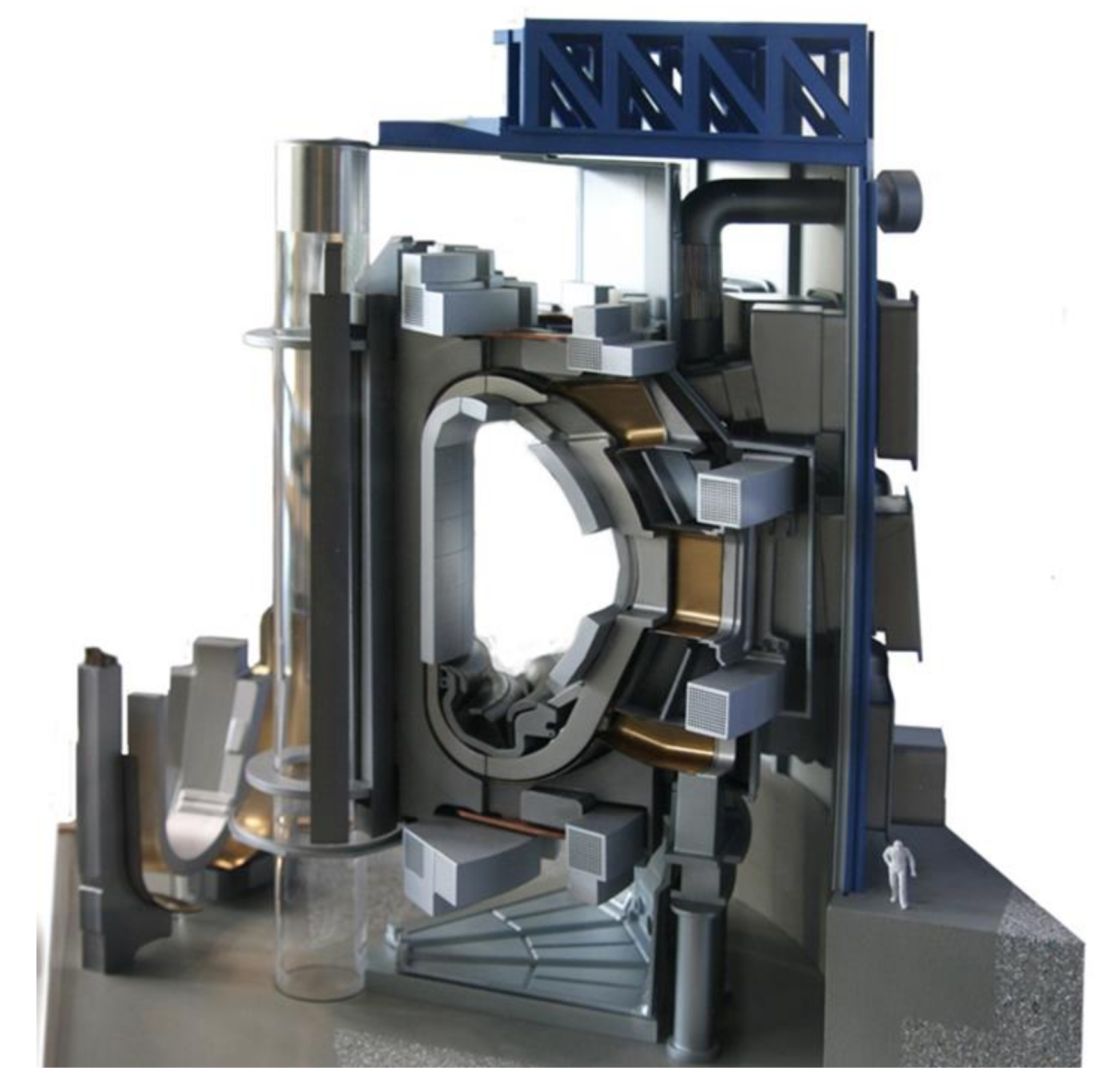
1. Introduction
2. Numerical Simulation Settings
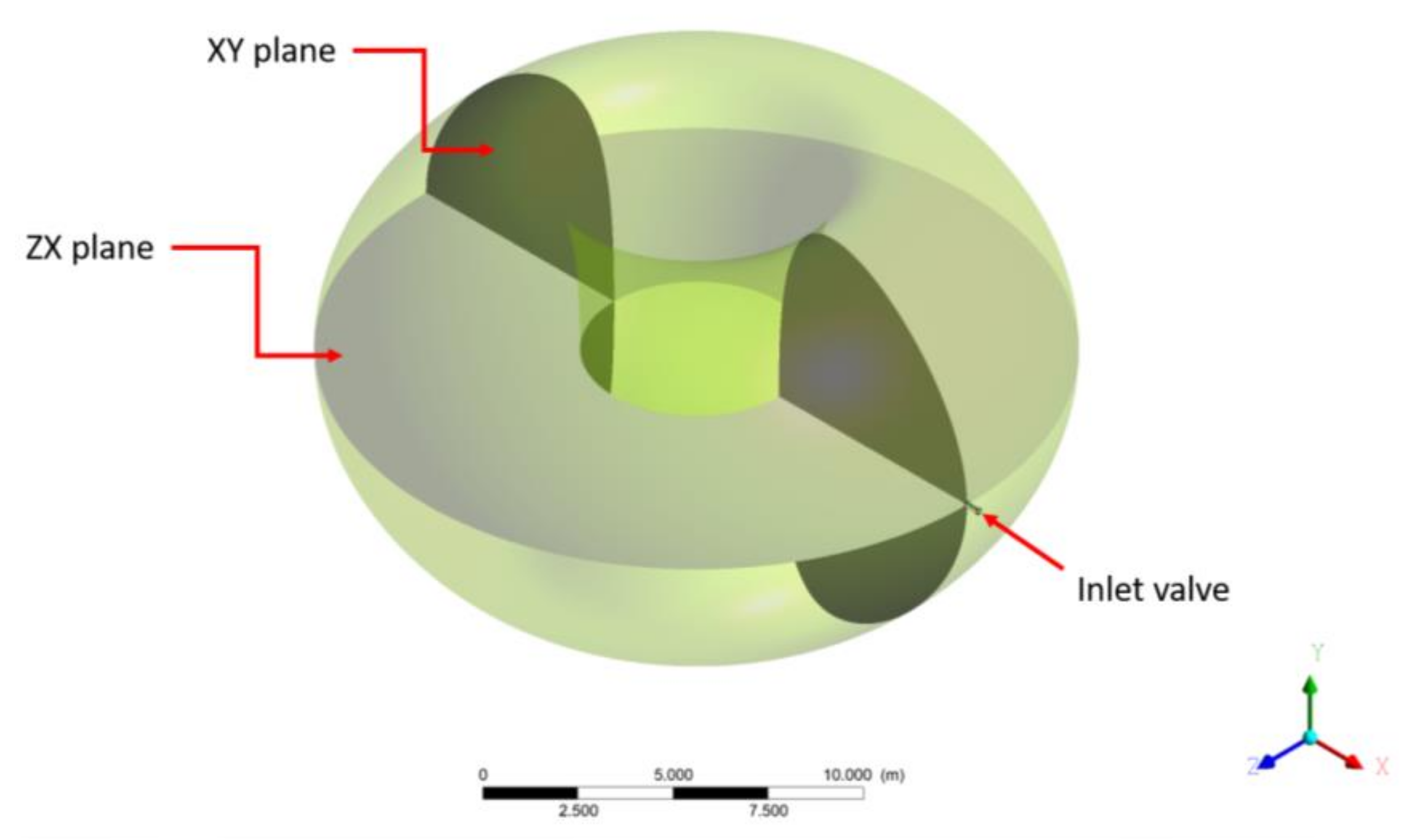
2.1. Geometry
2.2. Mathematical Model
- p is the pressure;
- ρ is the density;
- R is the specific gas constant, calculated as the universal gas constant divided by the molecular weight; and,
- T is the temperature of the gas.
- T0 is the absolute temperature;
- p0 is the absolute pressure;
- γ is the heat capacity ratio; and,
- M is the Mach number.
- t is the time variable;
- V is the velocity vector of the element; and,
- Cp is the mass-specific heat capacity constant of the gas (air); and,
- λ is the thermal conductivity.
2.3. Boundary Conditions and Outputs Variables
2.4. Model Validation
3. Results
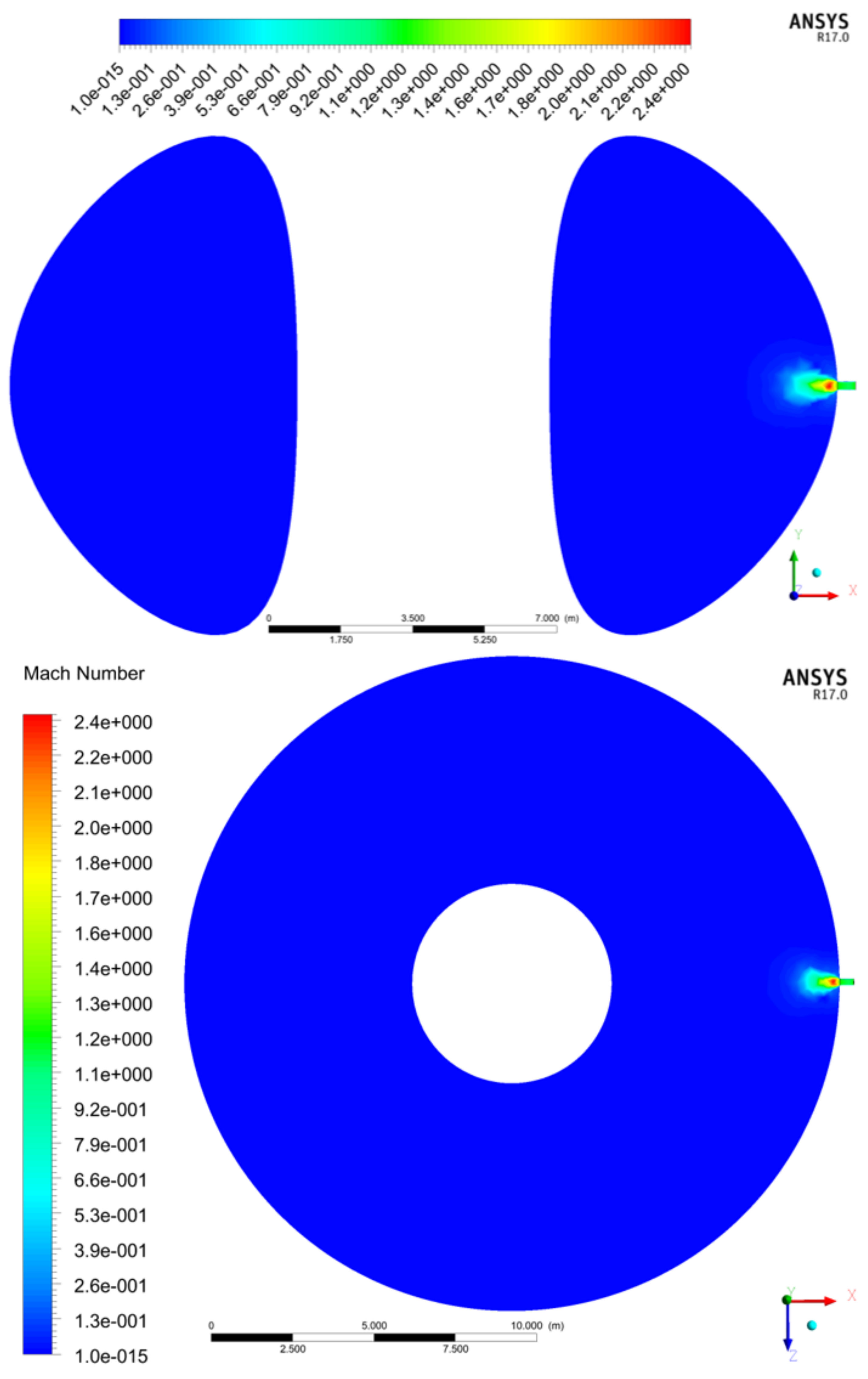
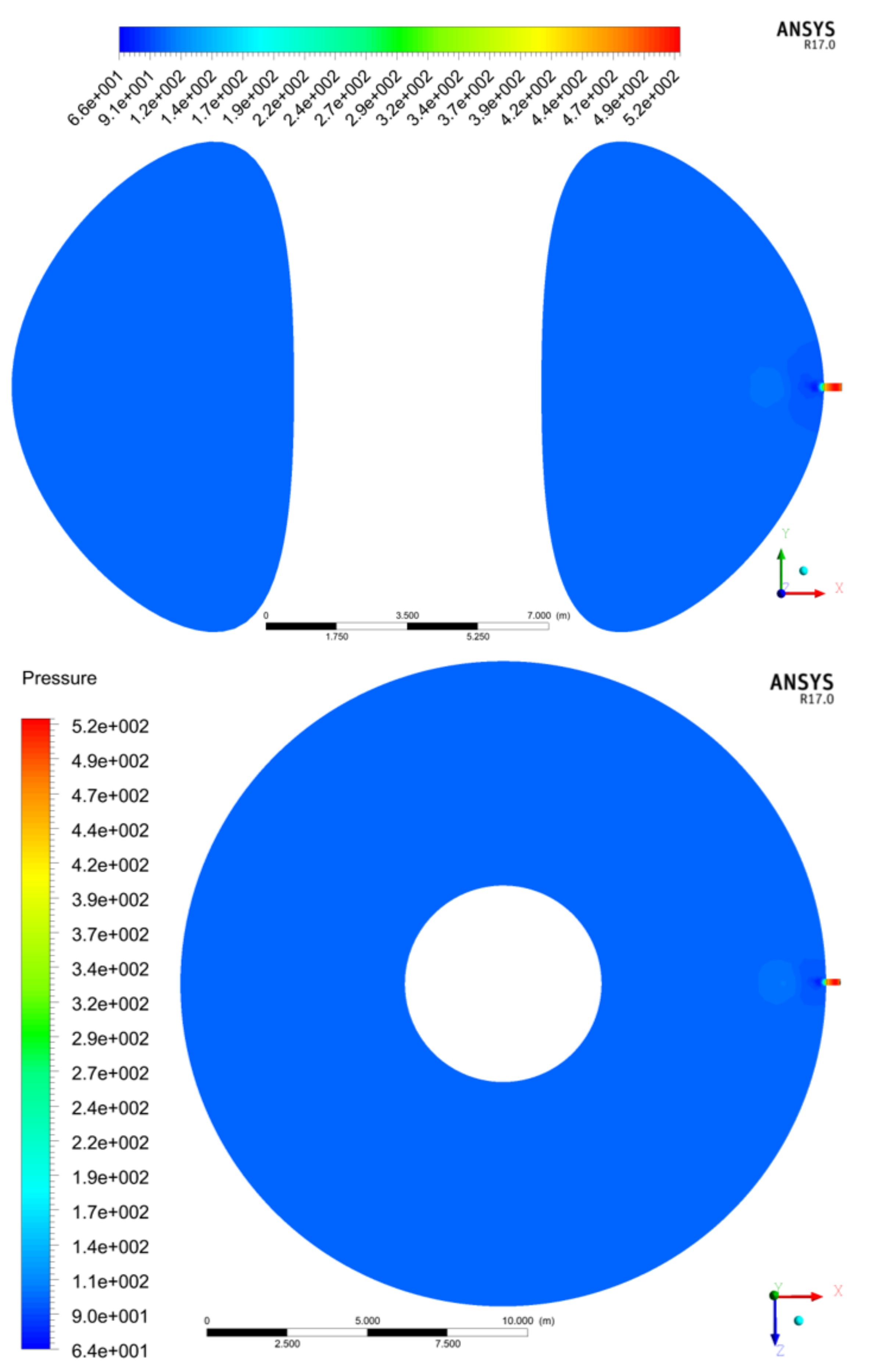
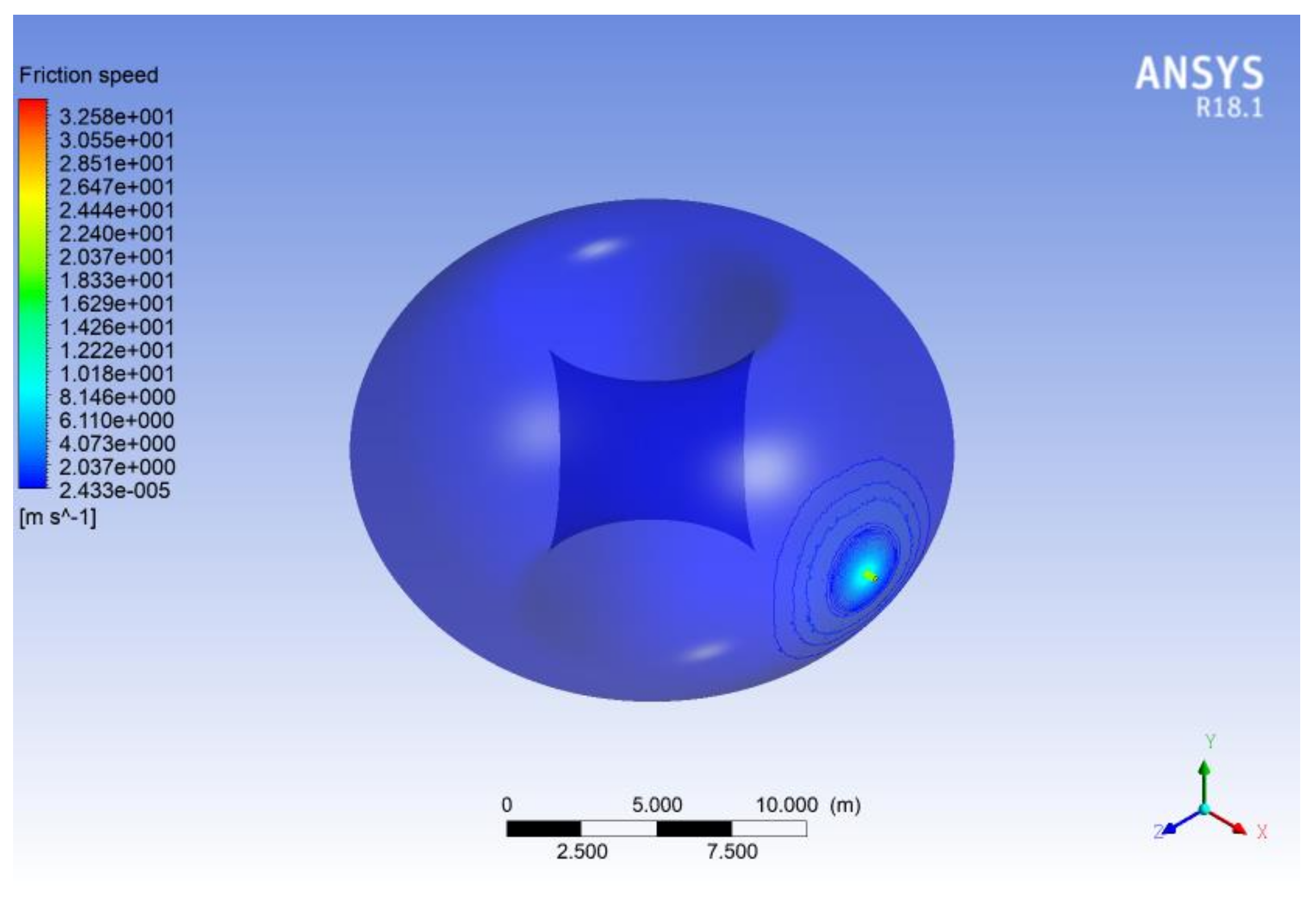
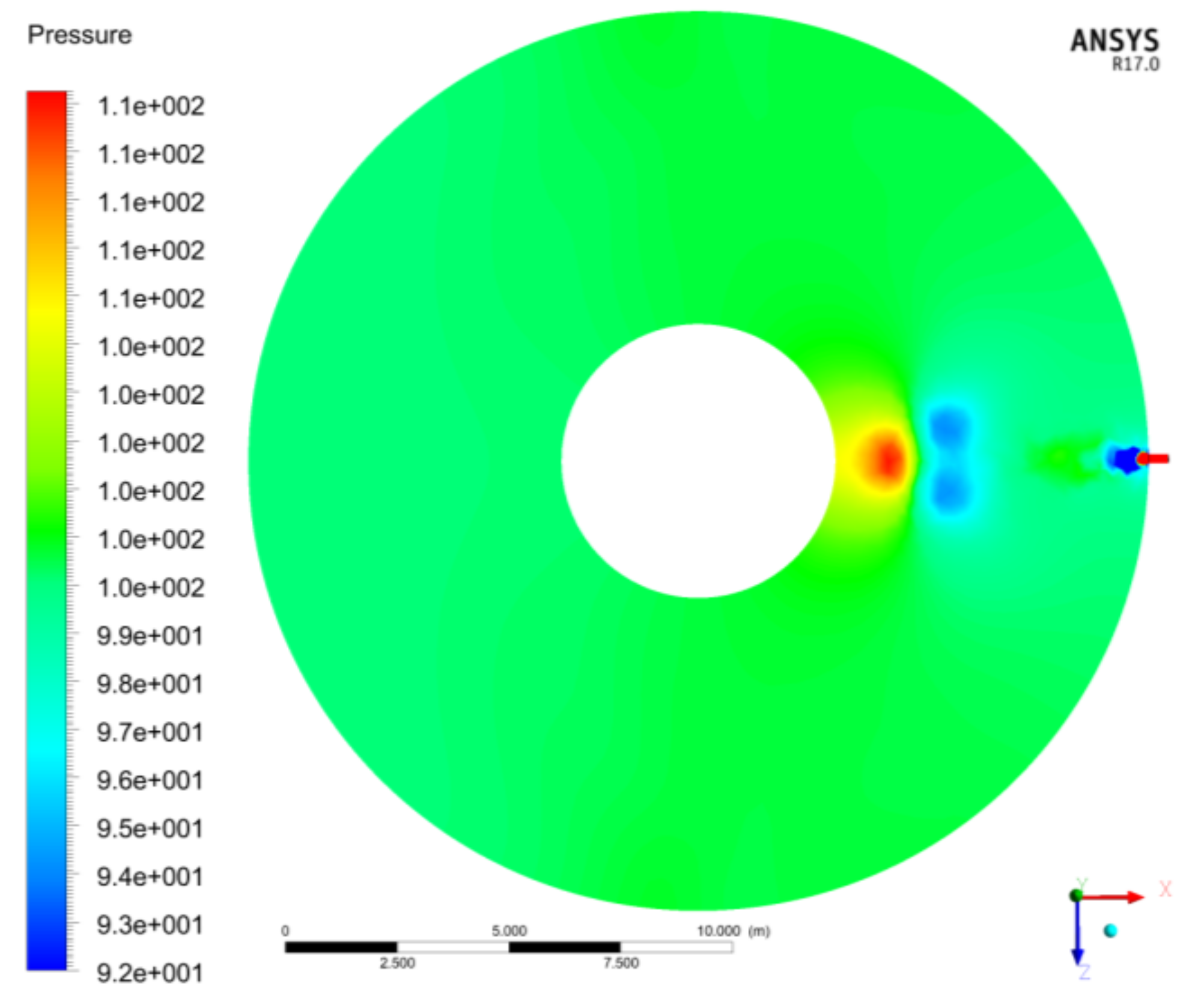
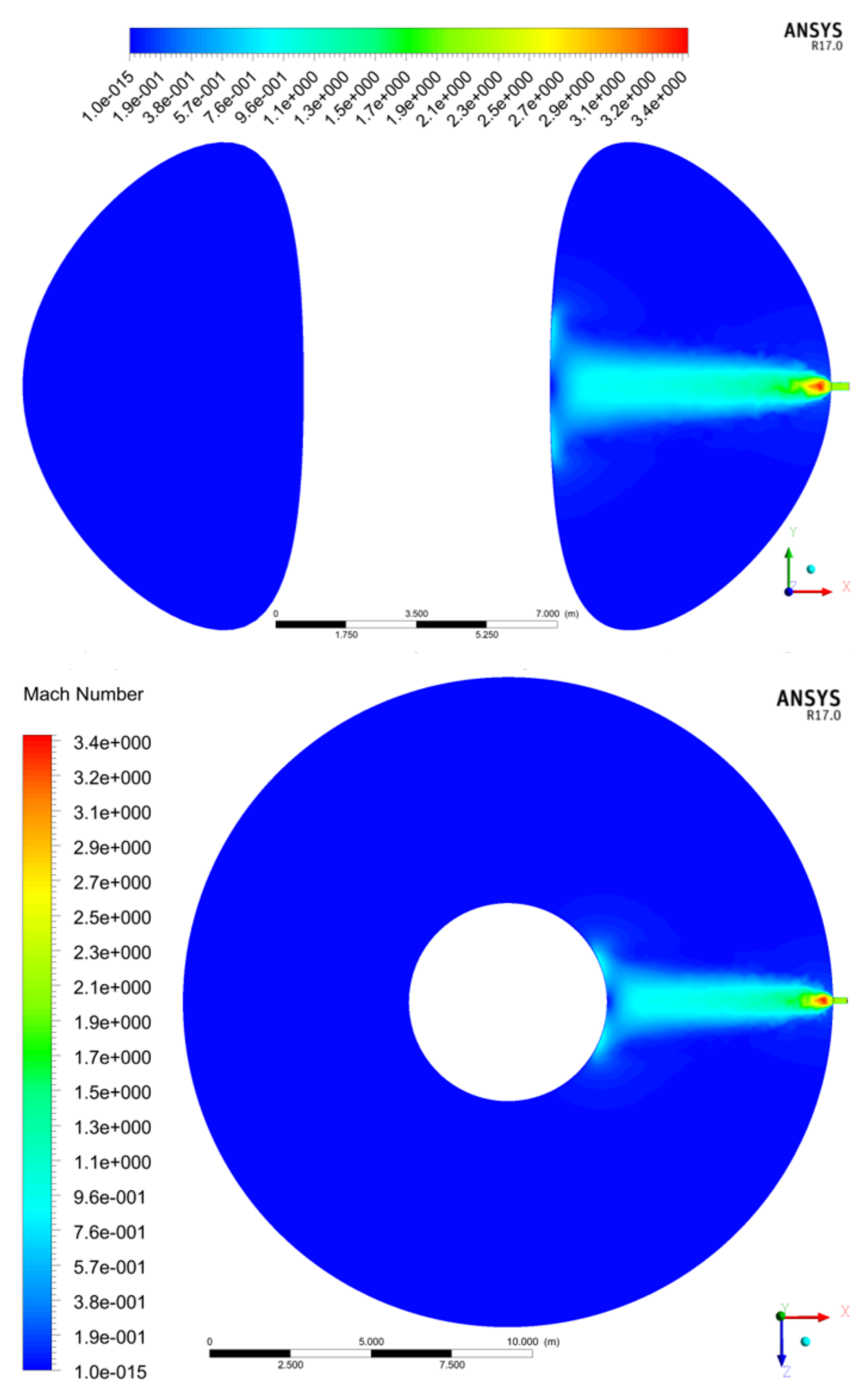
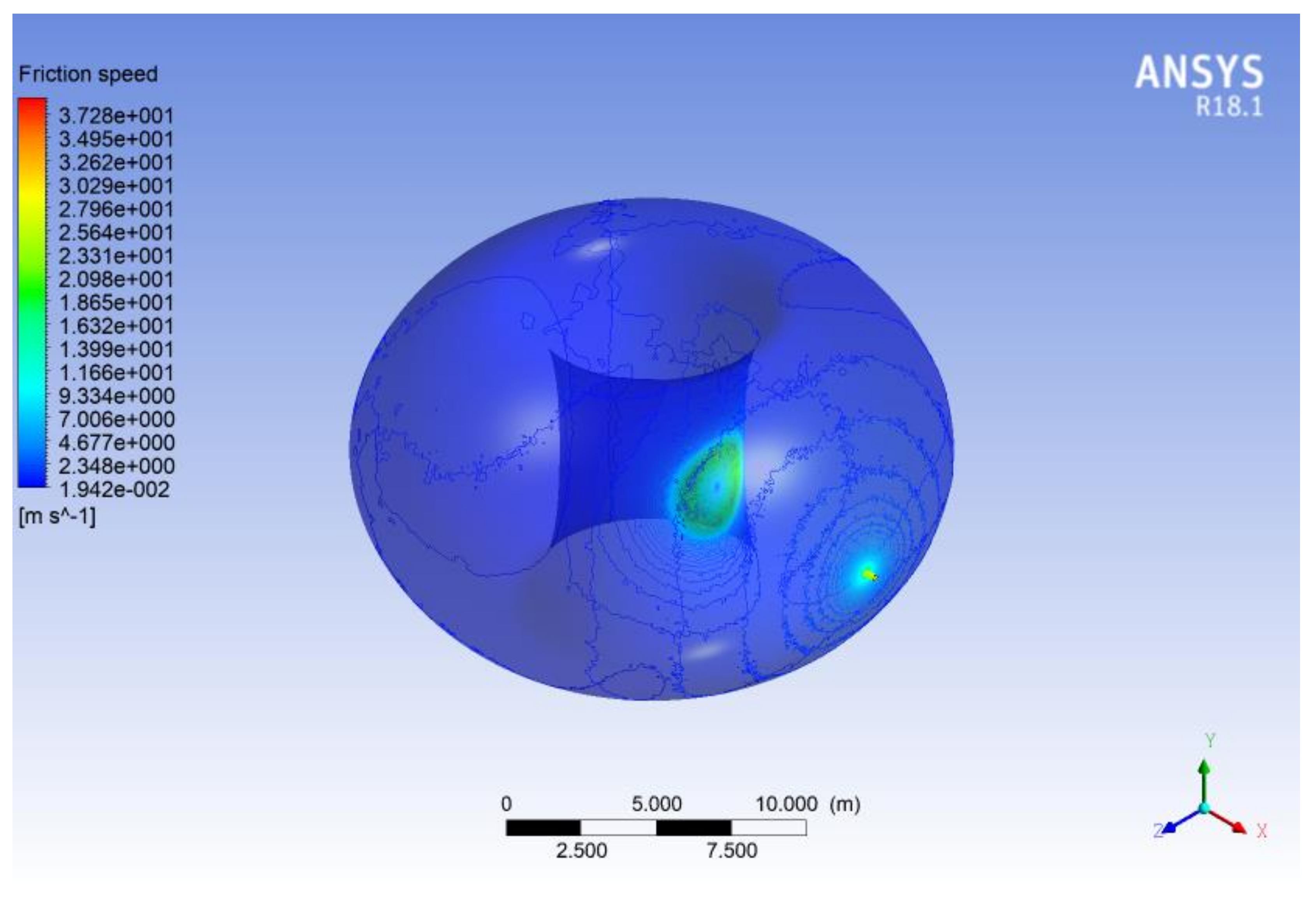
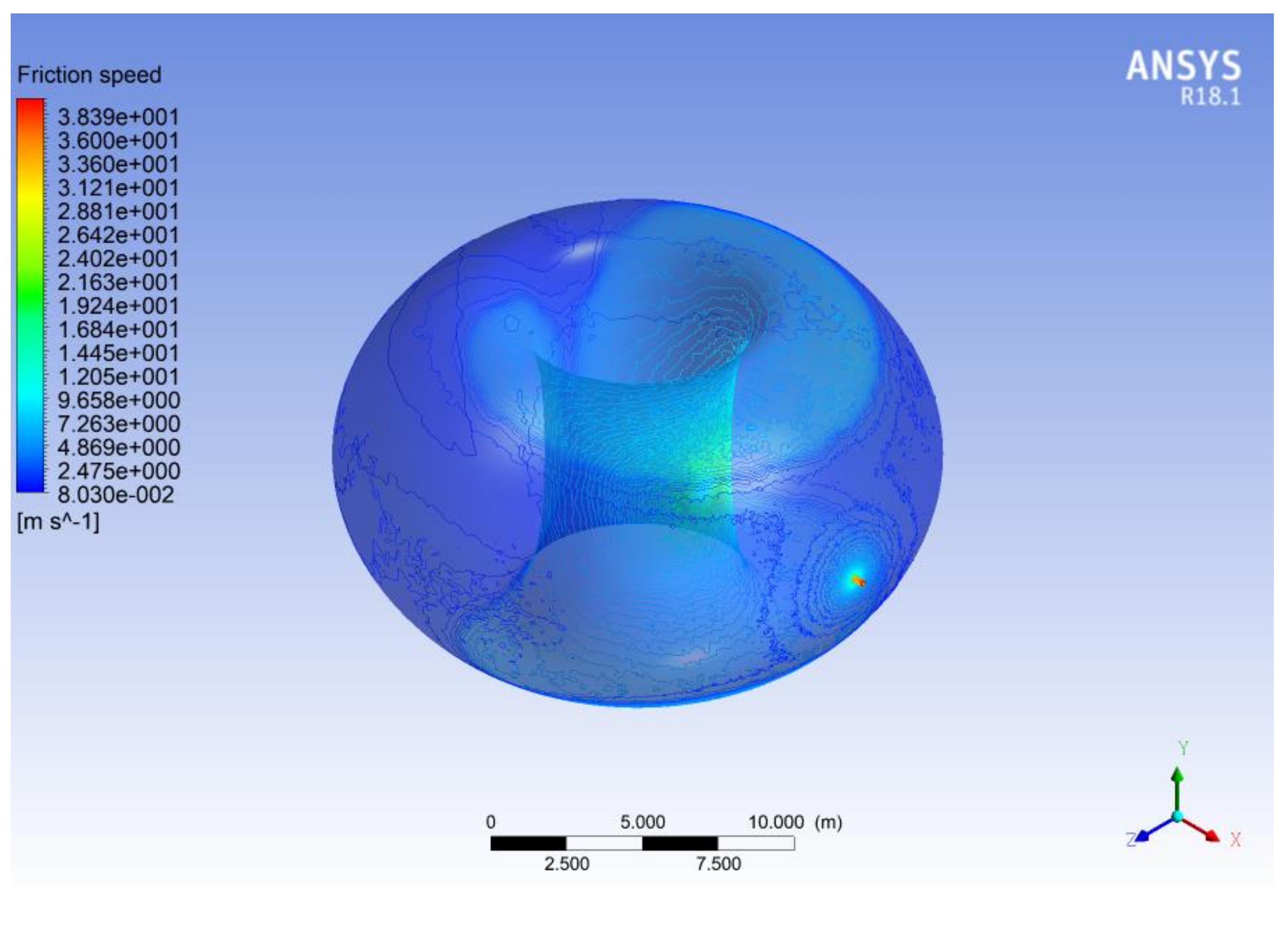
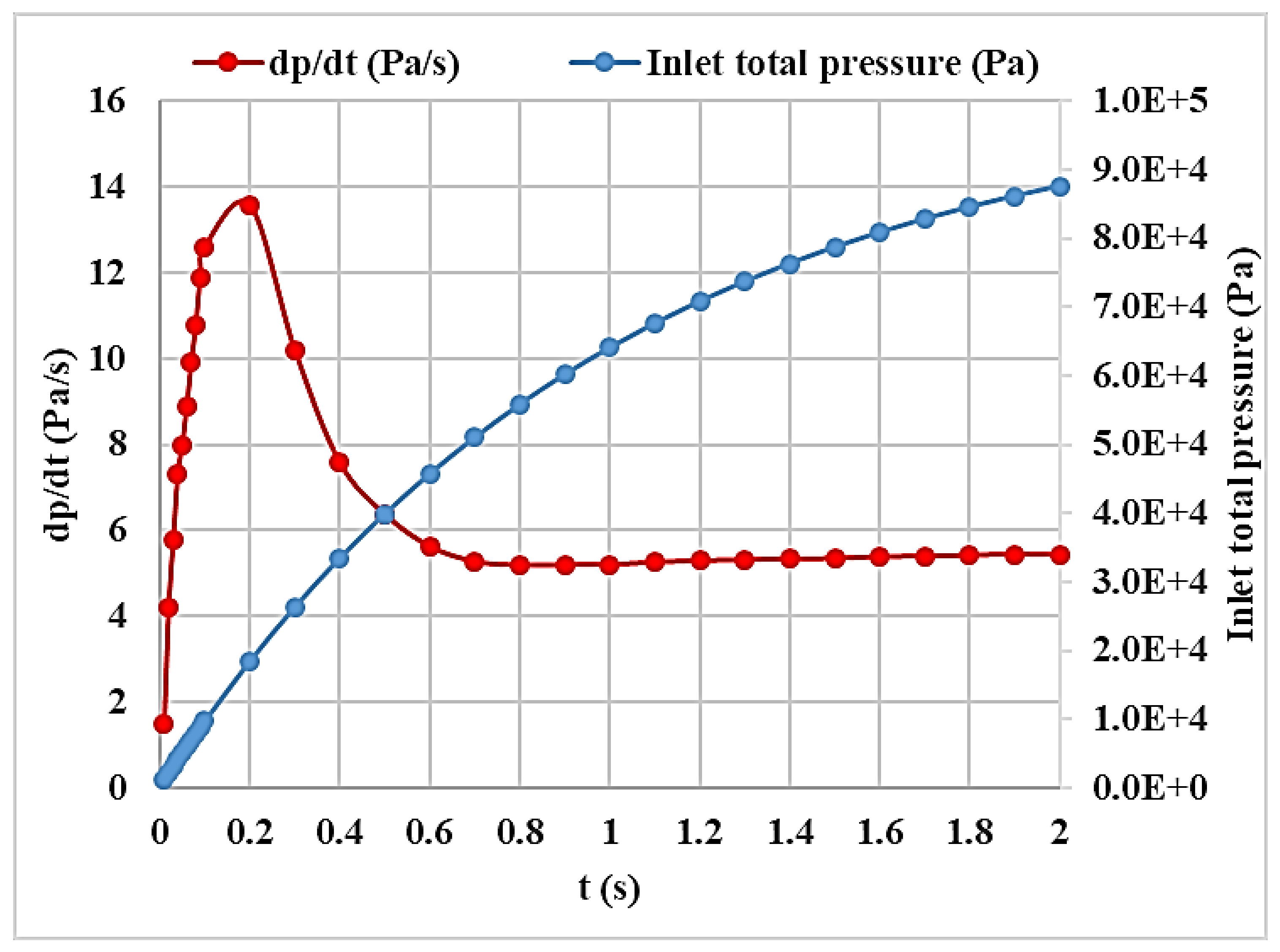
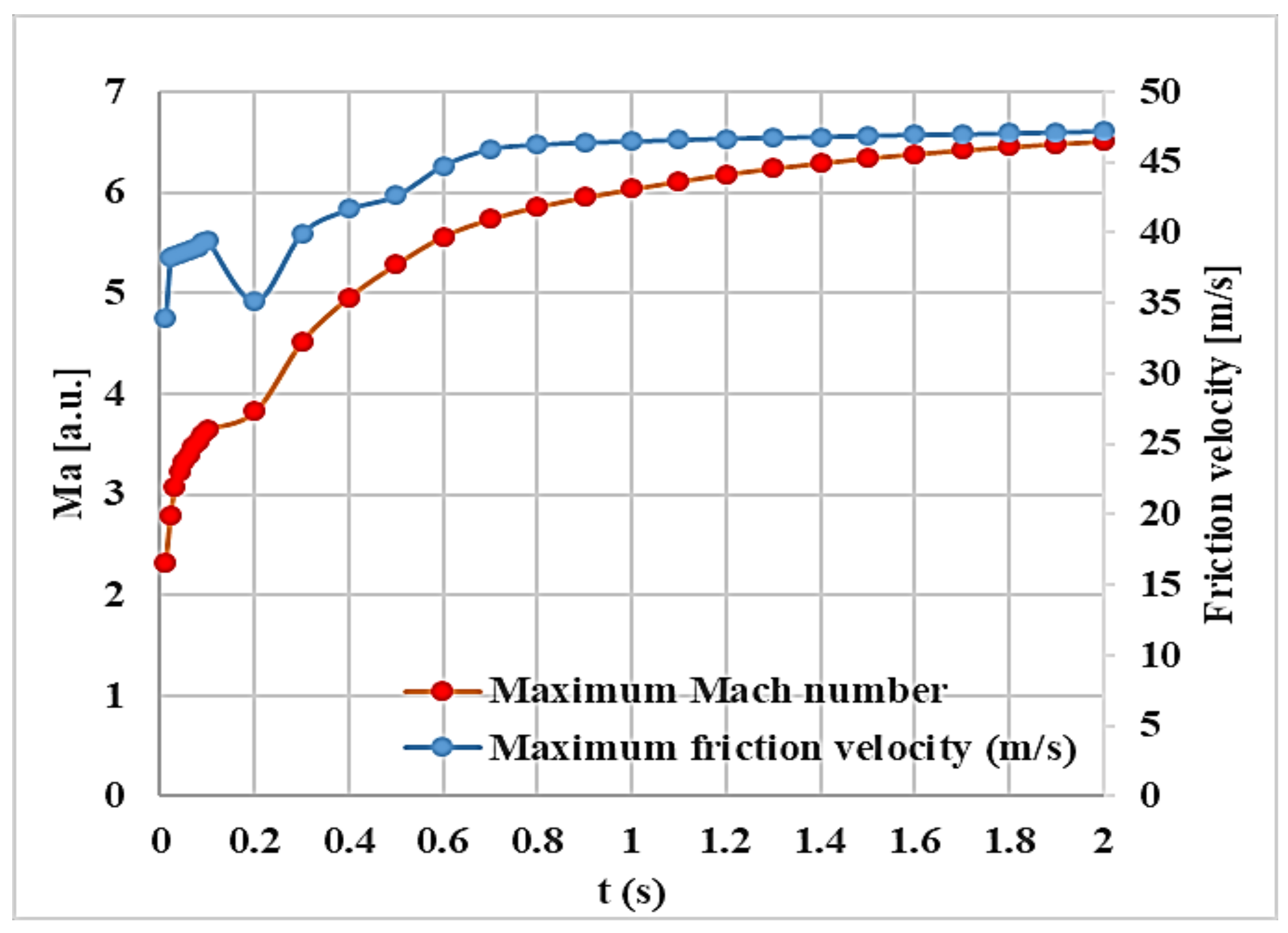
3.1. Mach Number, Static Pressure, and Velocity Friction Fields
3.2. Mach Number, Static Pressure, and Velocity Friction Fields
4. Conclusions
Supplementary Materials
Author Contributions
Conflicts of Interest
References
- ITER—The Way to New Energy. Available online: https://www.iter.org/ (accessed on 16 March 2018).
- Romanelli, F.; Barabaschi, P.; Borba, D.; Federici, G.; Horton, L.; Neu, R.; Stork, D.; Zohm, H. Fusion electricity: A roadmap to the realization of fusion energy. In Proceedings of the European Energy Conference, Budapest, Hungary, 27–30 Septmber 2013; p. 36. [Google Scholar]
- Bigot, B. ITER: A unique international collaboration to harness the power of the stars. C. R. Phys. 2017, 18, 367–371. [Google Scholar] [CrossRef]
- Rondeau, A.; Peillon, S.; Roynette, A.; Sabroux, J.-C.; Gelain, T.; Gensdarmes, F.; Rohde, V.; Grisolia, C.; Chassefière, E. Characterization of dust particles produced in an all-tungsten wall tokamak and potentially mobilized by airflow. J. Nucl. Mater. 2015, 463, 873–876. [Google Scholar] [CrossRef]
- Loarte, A.; Lipschultz, B.; Kukushkin, A.S.; Matthews, G.F.; Stangeby, P.C.; Asakura, N.; Counsell, G.F.; Federici, G.; Kallenbach, A.; Krieger, K.; et al. Chapter 4: Power and Particle Control. Nucl. Fusion 2007, 47, S203. [Google Scholar] [CrossRef]
- Stork, D.; Agostini, P.; Boutard, J.L.; Diegele, E.; Dudarev, S.L.; English, C.; Federici, G.; Gilbert, M.R.; Gonzalez, S.; Ibarra, A.; et al. Materials R&D for a timely DEMO: Key findings and recommendations ofthe EU Roadmap Materials Assessment Group. Fusion Eng. Des. 2014, 89, 1586–1594. [Google Scholar]
- Maisonnier, D.; Campbell, D.; Cook, I.; di Pace, L.; Giancarli, L.; Hayward, J.; Puma, A.L.; Medrano, M.; Norajitra, P.; Roccella, M.; et al. Power plant conceptual studies in Europe. Nucl. Fusion 2007, 47, 1524–1532. [Google Scholar] [CrossRef]
- Rieth, M.; Dudarev, S.L.; Gonzalez de Vicente, S.M.; Aktaa, J.; Ahlgren, T.; Antusch, S.; Armstrong, D.E.J.; Balden, M.; Baluc, N.; Barthe, M.-F.; et al. Recent progress in research on tungsten materials for nuclear fusion. J. Nucl. Mater. 2013, 432, 482–500. [Google Scholar] [CrossRef]
- Rieth, M.; Dudarev, S.L.; Gonzalez de Vicente, S.M.; Aktaa, J.; Ahlgren, T.; Antusch, S.; Armstrong, D.E.J.; Balden, M.; Baluc, N.; Barthe, M.-F.; et al. A brief summary of the progress on the EFDA tungsten materials. J. Nucl. Mater. 2013, 442, S173–S180. [Google Scholar] [CrossRef]
- Rieth, M.; Boutard, J.L.; Dudarev, S.L.; Ahlgren, T.; Antusch, S.; Baluc, N.; Barthe, M.-F.; Becquart, C.S.; Ciupinski, L.; Correia, J.B.; et al. Review on the EFDA programme on tungsten materials technology and science. J. Nucl. Mater. 2011, 417, 463–467. [Google Scholar] [CrossRef]
- López-Ruiz, P.; Ordás, N.; Iturriza, I.; Koch, F.; García-Rosales, C. Powder metallurgical processing of self-passivating tungsten alloys for fusion first wall application. J. Nucl. Mater. 2013, 442, S219–S224. [Google Scholar] [CrossRef]
- Longhurst, G.R.; Snead, L.L.; Abou-Sena, A.A. The status of beryllium research for fusion in the United States. In Proceedings of the 6th IEA International Workshop on Beryllium Technology for Fusion, Miyazaki, Japan, 2–5 December 2003. [Google Scholar]
- Bloom, E.E. The challenge of developing structural materials for fusion power systems. J. Nucl. Mater. 1998, 258–263, 7–17. [Google Scholar] [CrossRef]
- Ehrlich, K.; Bloom, E.E.; Kondo, T. International strategy for fusion materials development. J. Nucl. Mater. 2001, 283–287, 79–88. [Google Scholar] [CrossRef]
- Zinkle, S.J.; Victoria, M.; Abe, K. Scientific and engineering advances from fusion materials R&D. J. Nucl. Mater. 2002, 307–311, 31–42. [Google Scholar]
- Bloom, E.E.; Conn, R.W.; Davis, J.W.; Gold, R.E.; Little, R.; Schultz, K.R.; Smith, D.L.; Wiffen, F.W. Low Activation Materials for Fusion Applications. J. Nucl. Mater. 1984, 122, 17–26. [Google Scholar] [CrossRef]
- Federici, G.; Skinner, C.H.; Brooks, J.N.; Coad, J.P.; Grisolia, C.; Haasz, A.A.; Hassanein, A.; Philipps, V.; Pitcher, C.S.; Roth, J.; et al. Plasma-material Interactions in current tokamaks and their implications for next step fusion reactors. Nucl. Fusion 2001, 41. [Google Scholar] [CrossRef]
- Malizia, A.; Poggi, L.A.; Ciparisse, J.-F.; Talebzadeh, S.; Gelfusa, M.; Murari, A.; Gaudio, P. Plasma-material interactions problems and dust creation and re-suspension in case of accidents in nuclear fusion plants: A new challenge for reactors like ITER and DEMO. In Advanced Surface Engineering Materials; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Gilliam, S.; Gidcumb, S.; Parikh, N.; Forsythe, D.; Patnaik, B.; Hunn, J.; Snead, L.; Lamaze, G. Retention and surface blistering of helium irradiated tungsten as a first wall material. J. Nucl. Mater. 2005, 347, 289–297. [Google Scholar] [CrossRef]
- Fukumoto, M.; Ohtsuka, Y.; Ueda, Y.; Taniguchi, M.; Kashiwagi, M.; Inoue, T.; Sakamoto, K. Blister formation on tungsten damaged by high energy particle irradiation. J. Nucl. Mater. 2008, 375, 224–228. [Google Scholar] [CrossRef]
- Tokitani, M.; Kajita, S.; Masuzaki, S.; Hirahata, Y.; Ohno, N.; Tanabe, T.; Group, L.E. Exfoliation of the tungsten fibreform nanostructure by unipolar arcing in the LHD divertor plasma. Nucl. Fusion 2001, 51. [Google Scholar] [CrossRef]
- Sharpe, J.; Petti, D.; Bartels, H. A review of dust in fusion devices: Implications for safety and operational performance. Fusion Eng. Des. 2002, 63–64, 153–163. [Google Scholar] [CrossRef]
- Novokhatsky, A.; Gorodetsky, V.; Gusev, A.; Zakharov, R. Zalavutdinov, Structure and chemical composition of magnetic dust formed in Globus-M Tokamak. In Proceedings of the 38th EPS Conference on Plasma Physics, Strasbourg, France, 27 June–1 July 2011. [Google Scholar]
- McCarthy, K.; Petti, D.; Carmack, W.; Smolik, G. The safety implications of tokamak dust size and surface area. Fusion Eng. Des. 1998, 42, 45–52. [Google Scholar] [CrossRef]
- Orlinskij, D.V.; Magyar, G. Plasma diagnostics on large tokamaks. Nucl. Fusion 1988, 28, 611–697. [Google Scholar] [CrossRef]
- Nie, M.; Ni, M.; Wei, S. Individual dose due to radioactivity accidental release from fusion reactor. J. Hazard. Mater. 2017, 327, 135–143. [Google Scholar] [CrossRef] [PubMed]
- Malizia, A.; Poggi, L.A.; Ciparisse, J.-F.; Rossi, R.; Bellecci, C.; Gaudio, P. A Review of Dangerous Dust in Fusion Reactors: From Its Creation to Its Resuspension in Case of LOCA and LOVA. Energies 2016, 9, 578. [Google Scholar] [CrossRef]
- Honda, T.; Bartels, H.-W.; Merrill, B.; Inabe, T.; Petti, D.; Moore, R.; Okazaki, T. Analyses of loss of vacuum accident (LOVA) in ITER. Fusion Eng. Des. 2000, 45, 361–375. [Google Scholar] [CrossRef]
- Rossi, R.; Gaudio, P.; Ciparisse, J.F.; Poggi, L.A.; Malizia, A. Imaging of dust re-suspension in case of LOVA. Fusion Eng. Des. 2018, 126, 156–169. [Google Scholar] [CrossRef]
- Malizia, A.; Camplani, M.; Gelfusa, M.; Lupelli, I.; Richetta, M.; Antonelli, L.; Conetta, F.; Scarpellini, D.; Carestia, M.; Peluso, E.; et al. Dust tracking techniques applied to the STARDUST facility: First results. Fusion Eng. Des. 2015, 89, 2098–2102. [Google Scholar] [CrossRef][Green Version]
- Ciparisse, J.; Malizia, A.; Poggi, L.; Gelfusa, M.; Murari, A.; Mancini, A.; Gaudio, P. First 3D numerical simulations validated with experimental measurements during a LOVA reproduction inside the new facility STARDUST-Upgrade. Fusion Eng. Des. 2015, 101, 204–208. [Google Scholar] [CrossRef]
- Ciparisse, J.-F.; Malizia, A.; Poggi, L.; Cenciarelli, O.; Gelfusa, M.; Carestia, M.; DiGiovanni, D.; Mancinelli, S.; Palombi, L.; Bellecci, C.; et al. Numerical Simulations as Tool to Predict Chemical and Radiological Hazardous Diffusion in Case of Nonconventional Events. Model. Simul. Eng. 2016. [Google Scholar] [CrossRef]
- Shao, Y.; Klose, M. A note on the stochastic nature of particle cohesive force and implications to threshold friction velocity for aerodynamic dust entrainment. Aeolian Res. 2016, 22, 123–125. [Google Scholar] [CrossRef]
- Shao, Y.; Lu, H. A simple expression for wind erosion threshold friction velocity. J. Geophys. Res. 2000, 105, 22437–22443. [Google Scholar] [CrossRef]
- Chkhetiani, G.; Gledzer, E.B.; Artamonova, M.S.; Iordanskii, M.A. Dust resuspension under weak wind conditions: Direct observations and model. Atmos. Chem. Phys. 2012, 12, 5147–5162. [Google Scholar] [CrossRef]
- Zhanf, F.; Reeks, M.; Kssane, M.P. Particle Resuspension in Turbulent Boundary Layers and the Influence of Non-Gaussian Removal Forces. J. Aerosol Sci. 2013, 58, 103–128. [Google Scholar]
- ITER. Available online: https://en.wikipedia.org/wiki/ITER (accessed on 16 March 2018).
- International Thermonuclear Experimental Reactor (ITER). Generic Site Safety Report (GSSR)—Volume VII, Analysis of Reference Events; Report No. G 84 RI 6 01-07-10 R 1.0. 10.; ITER: Cadarache, France, 2010. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.09 | 1.44 | 1.92 | 1 | 1.3 |
| 1.716 × 10-5 | 273.15 | 111 | 0.0241 | 273.15 | 194 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciparisse, J.-F.; Rossi, R.; Malizia, A.; Gaudio, P. 3D Simulation of a Loss of Vacuum Accident (LOVA) in ITER (International Thermonuclear Experimental Reactor): Evaluation of Static Pressure, Mach Number, and Friction Velocity. Energies 2018, 11, 856. https://doi.org/10.3390/en11040856
Ciparisse J-F, Rossi R, Malizia A, Gaudio P. 3D Simulation of a Loss of Vacuum Accident (LOVA) in ITER (International Thermonuclear Experimental Reactor): Evaluation of Static Pressure, Mach Number, and Friction Velocity. Energies. 2018; 11(4):856. https://doi.org/10.3390/en11040856
Chicago/Turabian StyleCiparisse, Jean-François, Riccardo Rossi, Andrea Malizia, and Pasquale Gaudio. 2018. "3D Simulation of a Loss of Vacuum Accident (LOVA) in ITER (International Thermonuclear Experimental Reactor): Evaluation of Static Pressure, Mach Number, and Friction Velocity" Energies 11, no. 4: 856. https://doi.org/10.3390/en11040856
APA StyleCiparisse, J.-F., Rossi, R., Malizia, A., & Gaudio, P. (2018). 3D Simulation of a Loss of Vacuum Accident (LOVA) in ITER (International Thermonuclear Experimental Reactor): Evaluation of Static Pressure, Mach Number, and Friction Velocity. Energies, 11(4), 856. https://doi.org/10.3390/en11040856