Research on Improved VSG Control Algorithm Based on Capacity-Limited Energy Storage System

Abstract
:1. Introduction
- A fourth-order model of VSG, being more detailed and accurate in mimicking SG, is established. Based on the second-order model, the steam-valving system and excitation system are added, taking the coordination between the two systems into consideration while avoiding the complicated transition period.
- A nonlinear control method, Hamilton approach is applied to VSG for better system suitability and stability. Control laws are deduced and the system enhancements are illustrated.
- Small-signal model is established for the obtaining boundaries of VSG coefficients.
- Relations between the capacity limits of storage devices and the VSG coefficients, such as the virtual inertia and damping, are discussed. An adaptive VSG control is designed via the energy control algorithm for accelerating the recovery from the transient period.
2. Virtual Synchronous Generator Modeling Based-On the Hamilton Approach
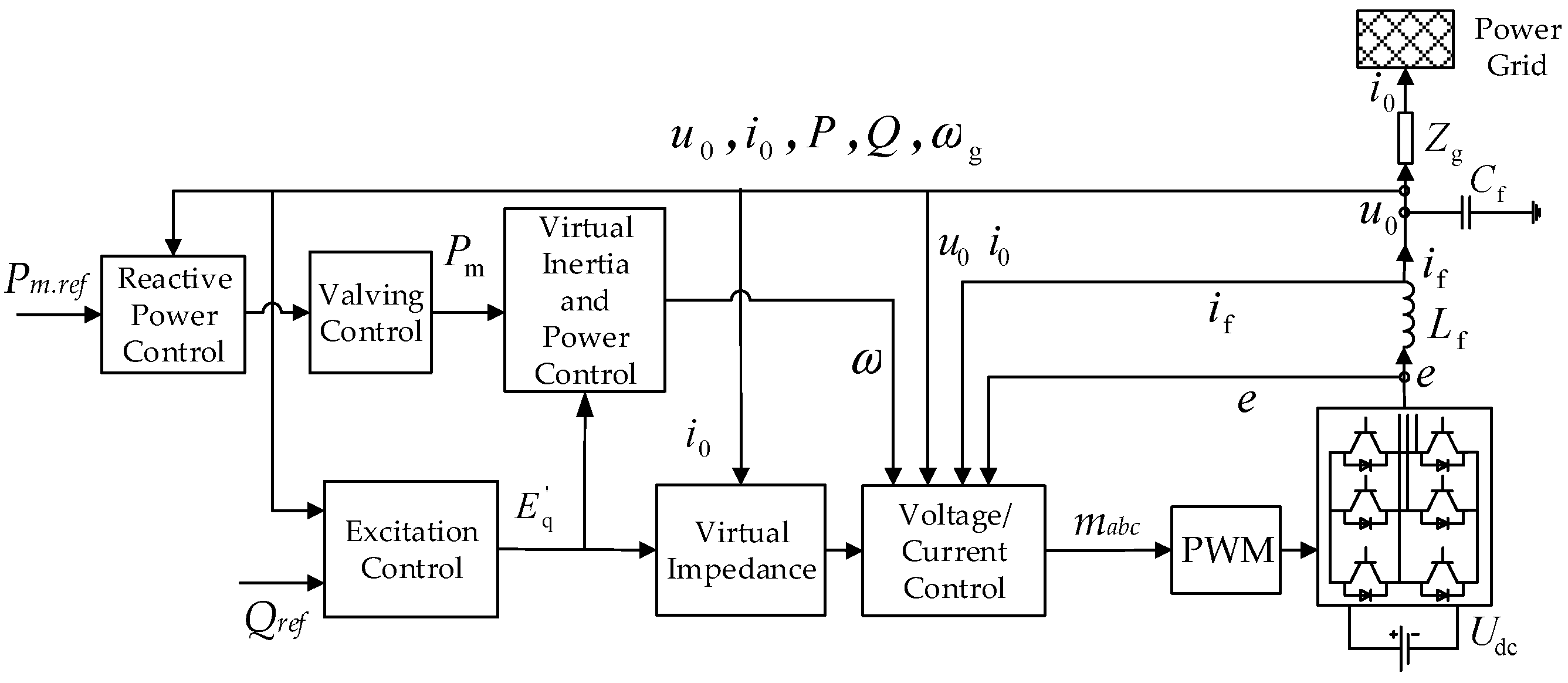
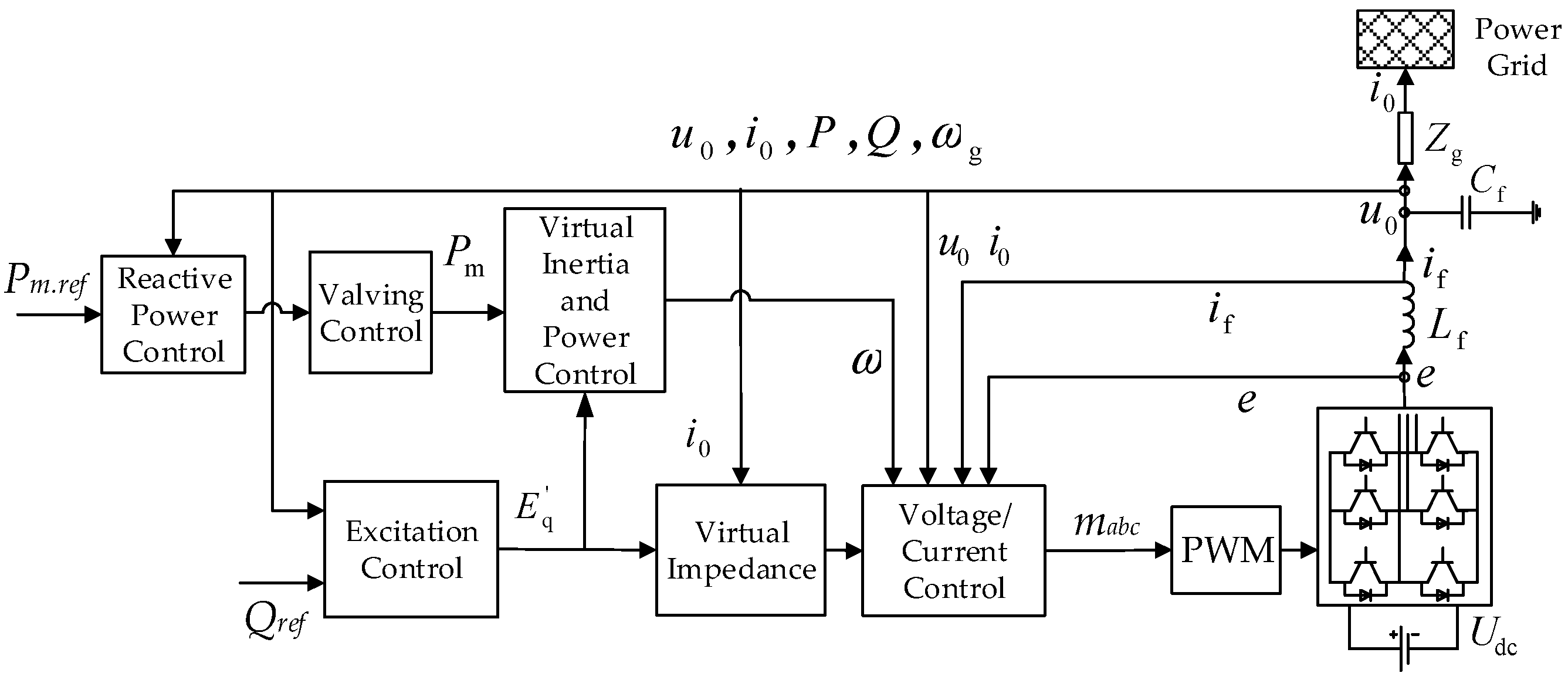
2.1. VSG Control System Overview
2.2. VSG Modeling Based on Dissipative Hamilton Theory
3. Improved VSG Control Strategy Considering Storage Capacity Limits
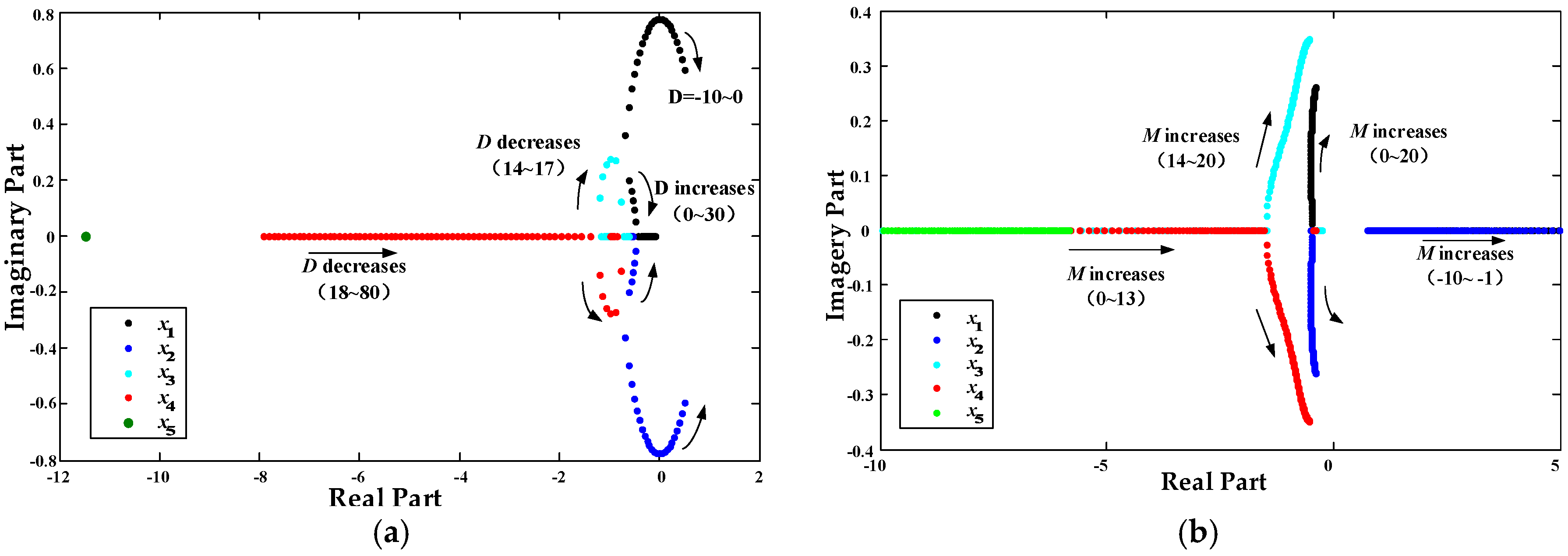
3.1. Linearized Small-Signal Model
3.2. Boundaries of VSG Parameters
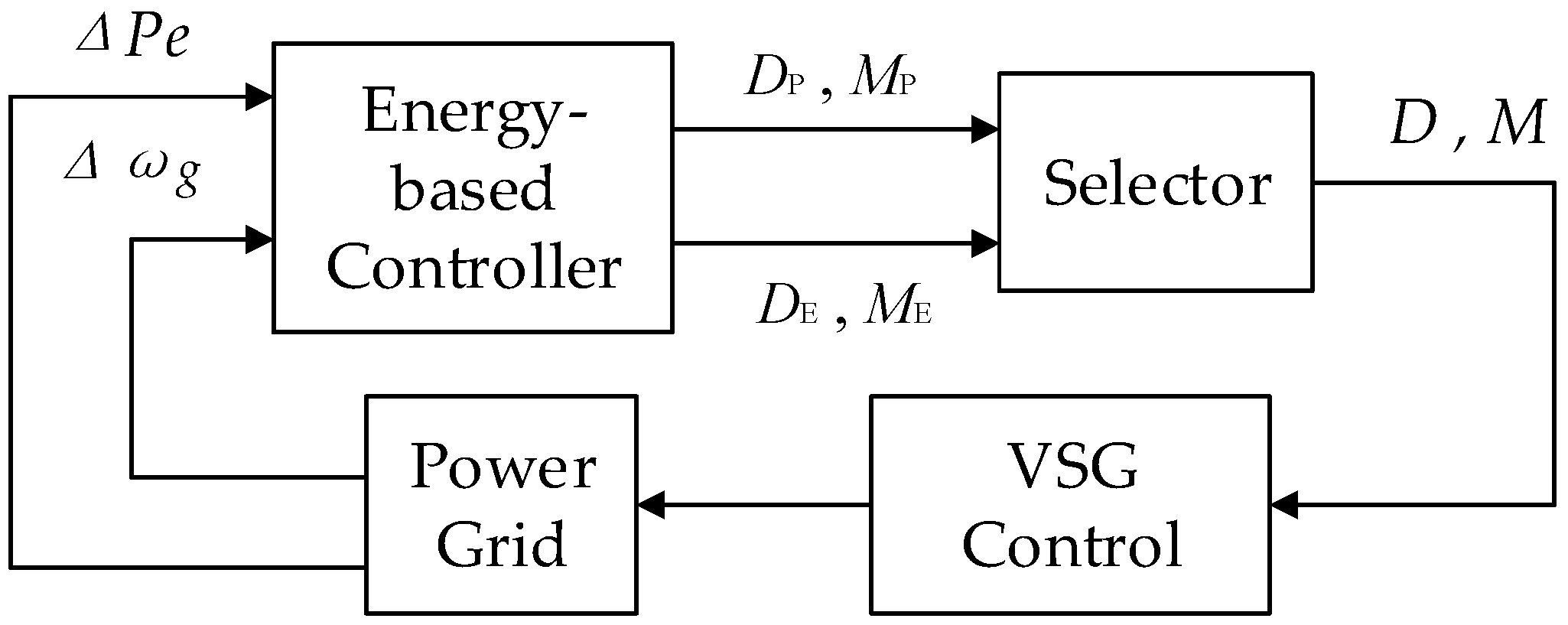
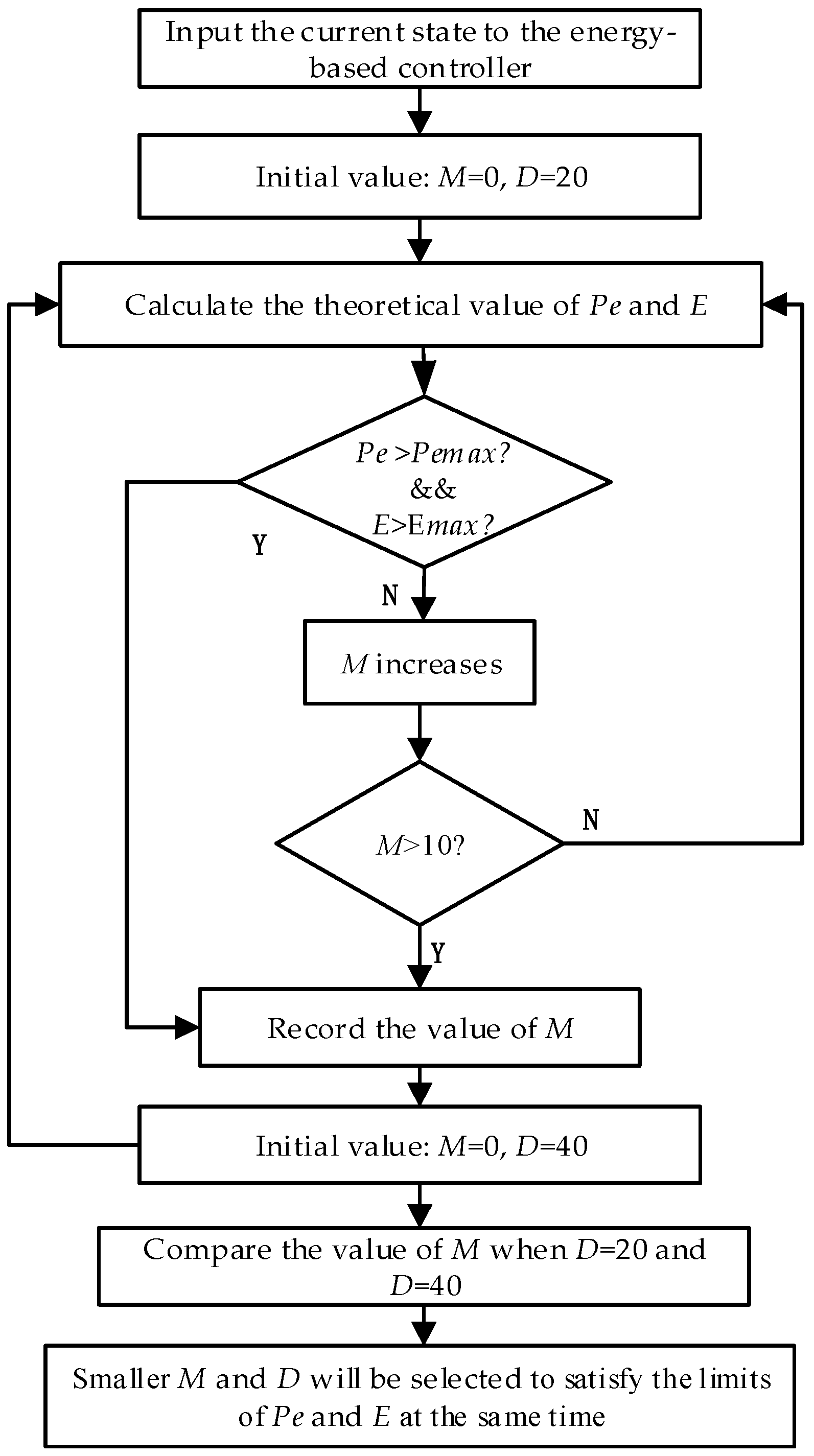
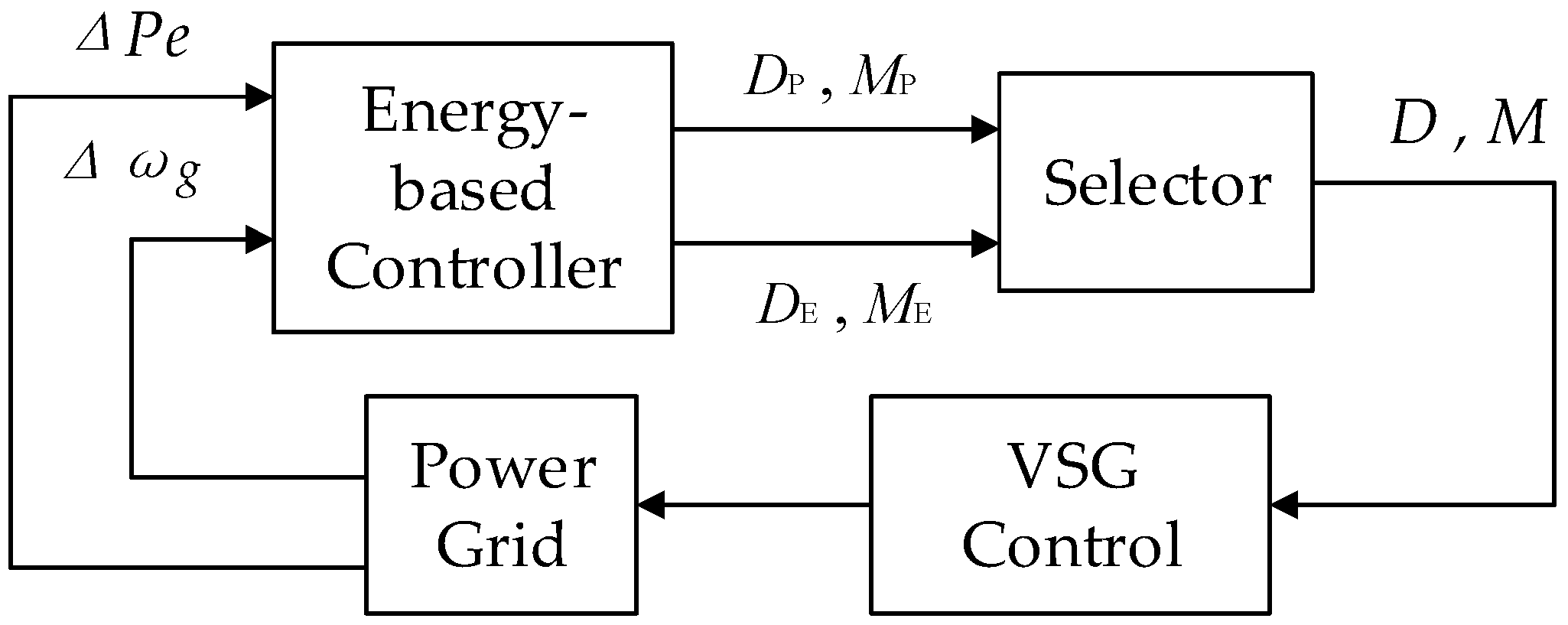
3.3. Design of the Energy Controller with the Restriction of Storage Capacity
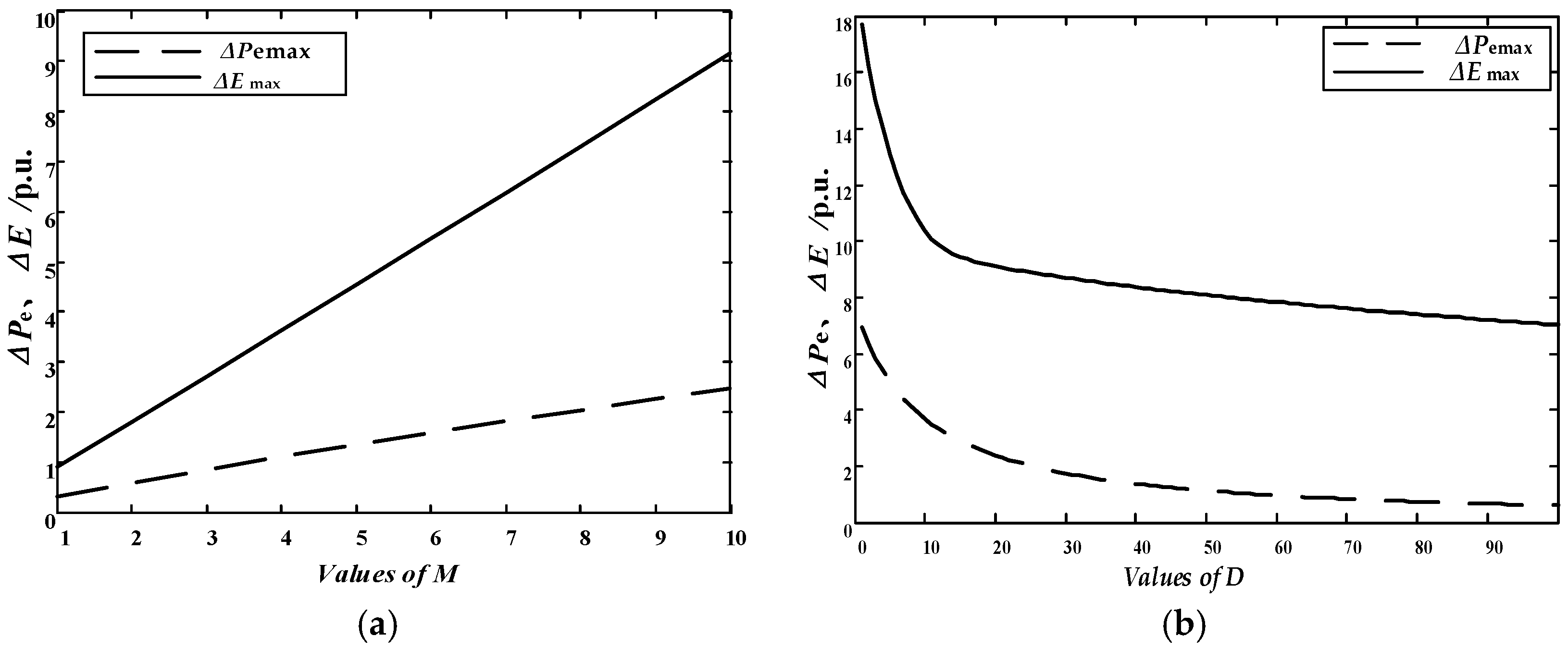
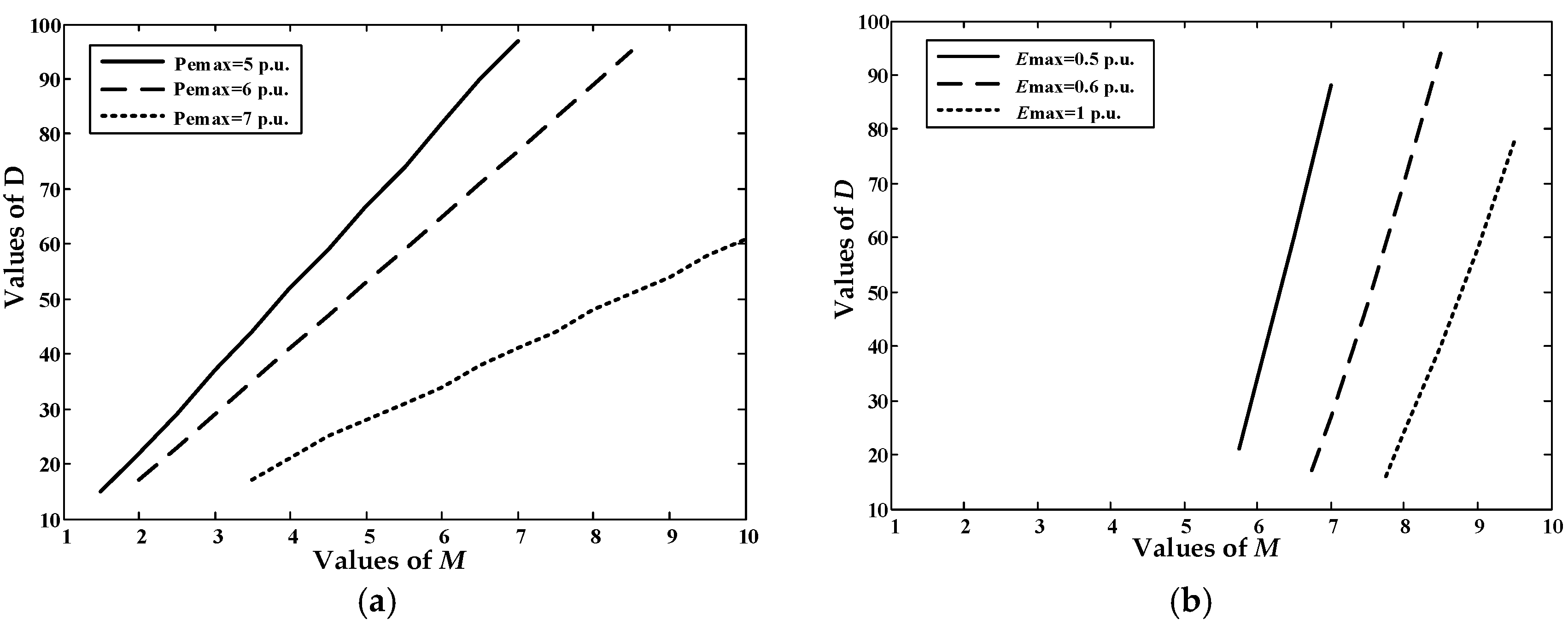
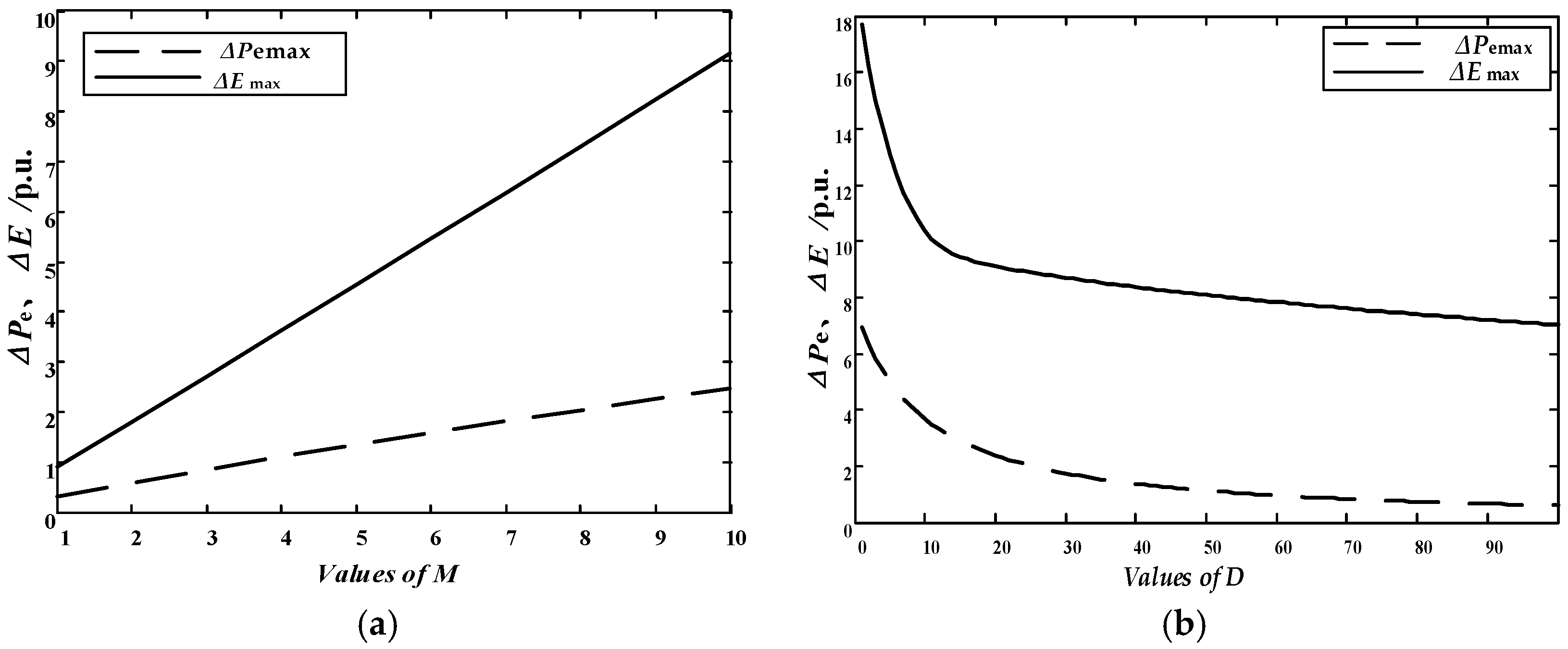
3.3.1. Relations between Storage Capacity Limits and VSG Coefficients
3.3.2. Adaptive Control via Energy-Based Algorithms
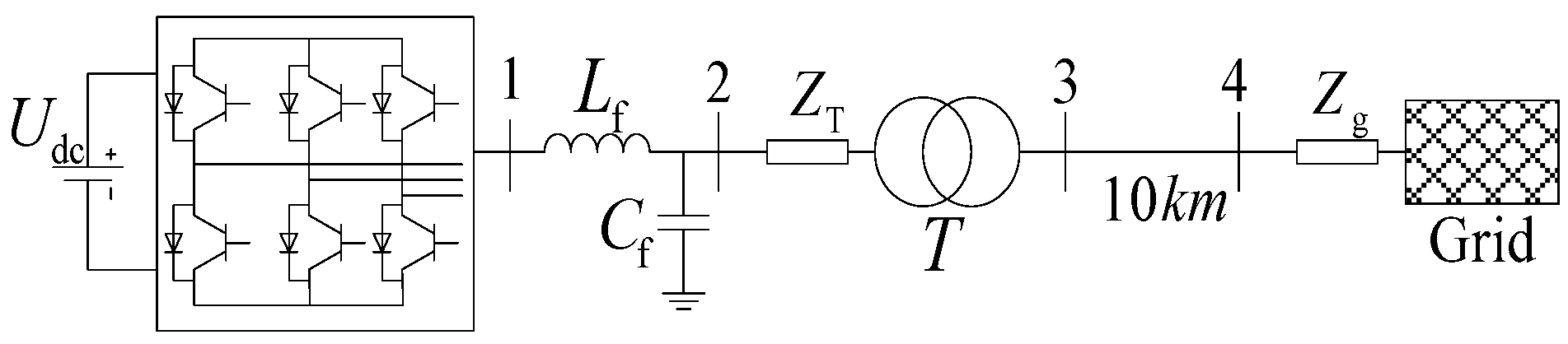
4. Simulations
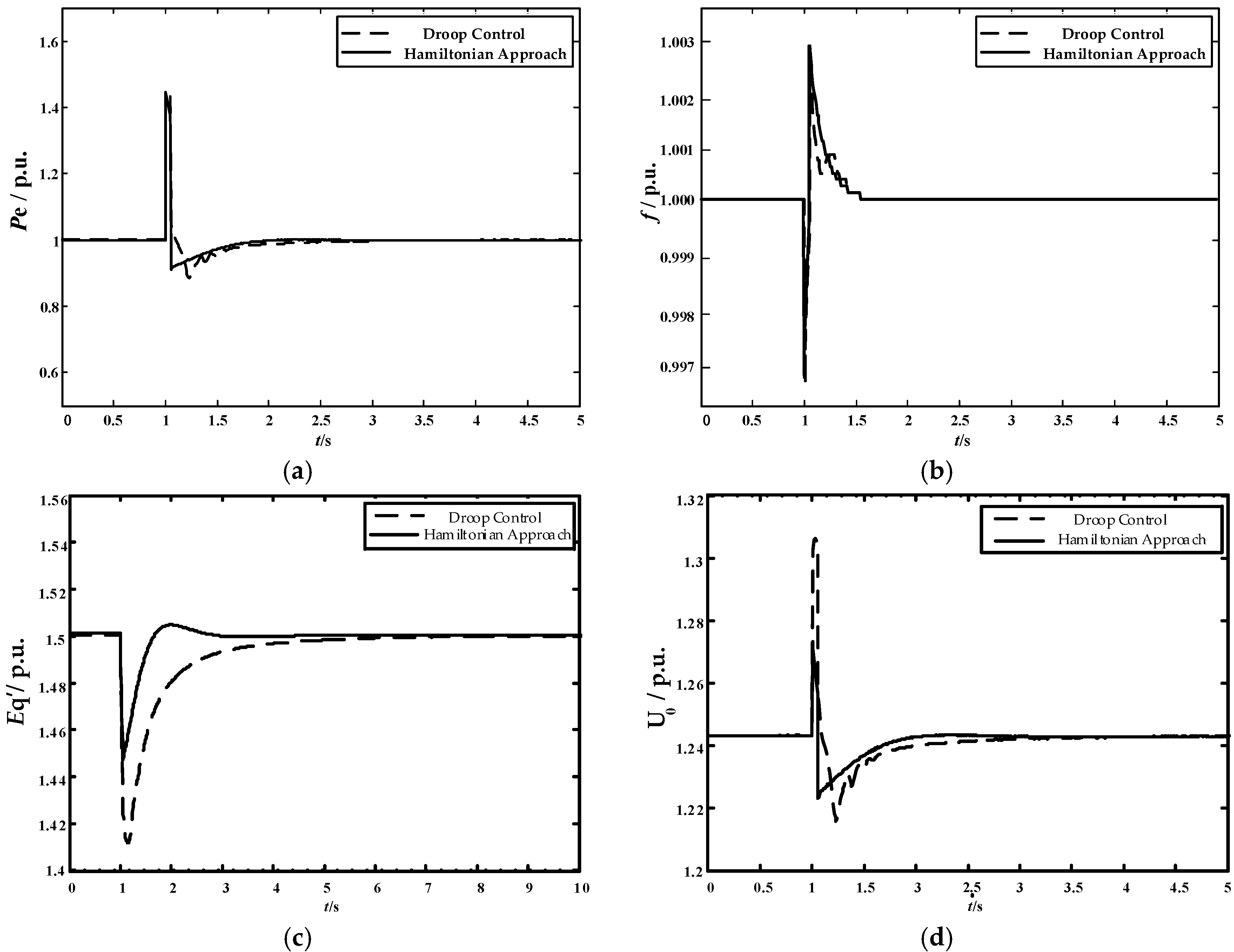
4.1. Comparisons between VSG Based on Droop Control and Hamilton Approach
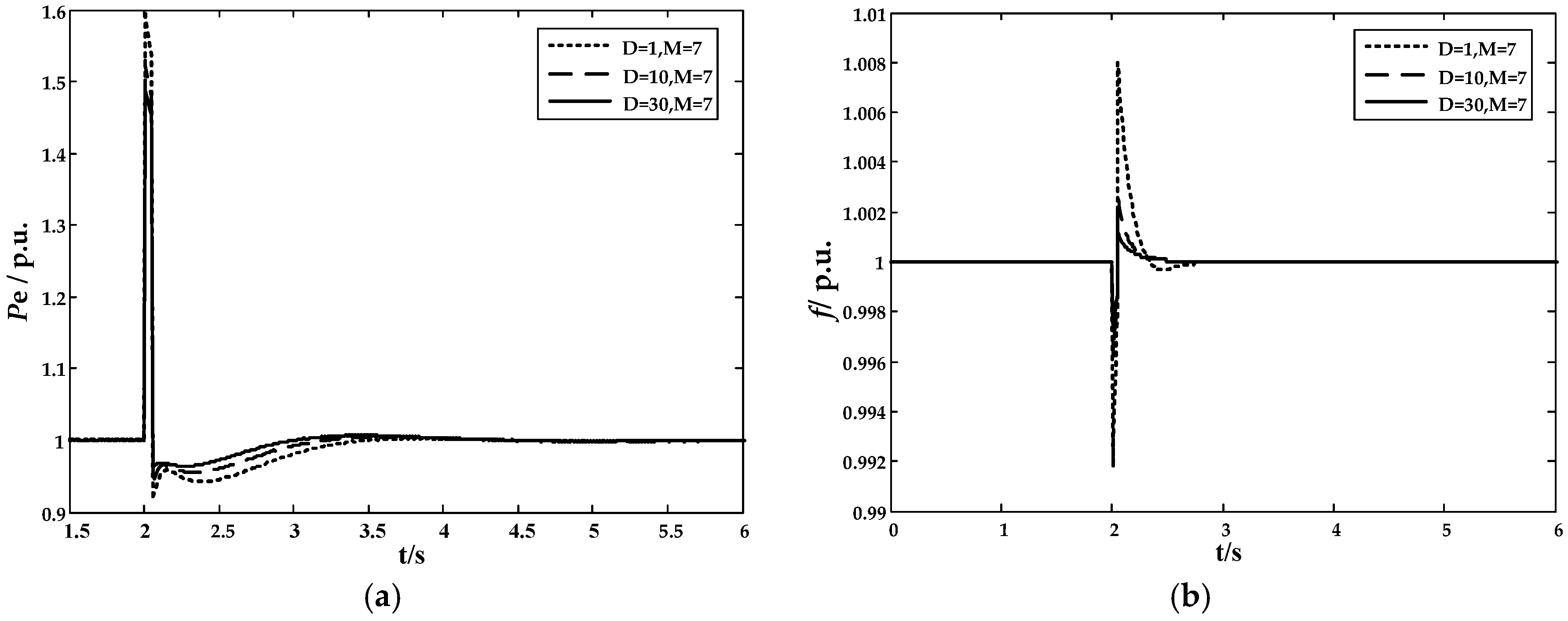
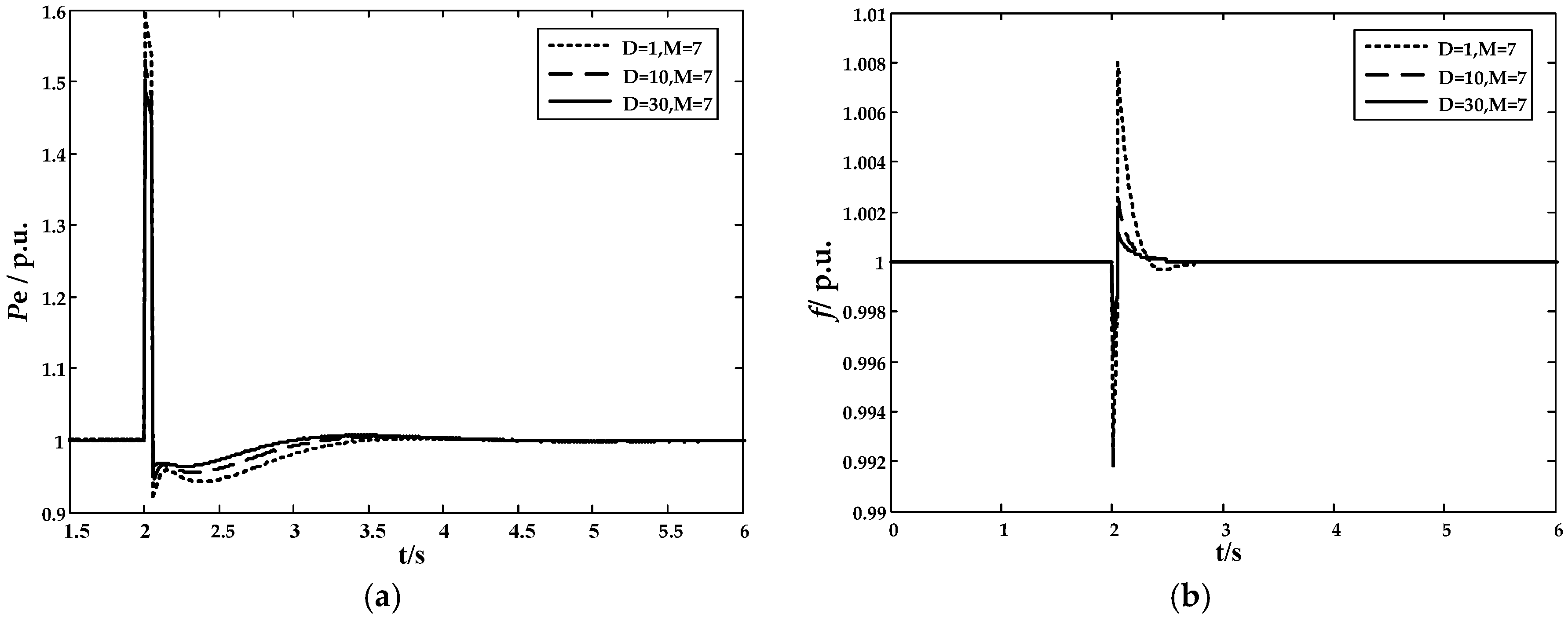
4.2. Effects of Different Controller Coefficients on the System Output Responses
4.2.1. Output Responses with Different D (Virtual Damping)
4.2.2. Output Responses with Different M (Virtual Inertia)
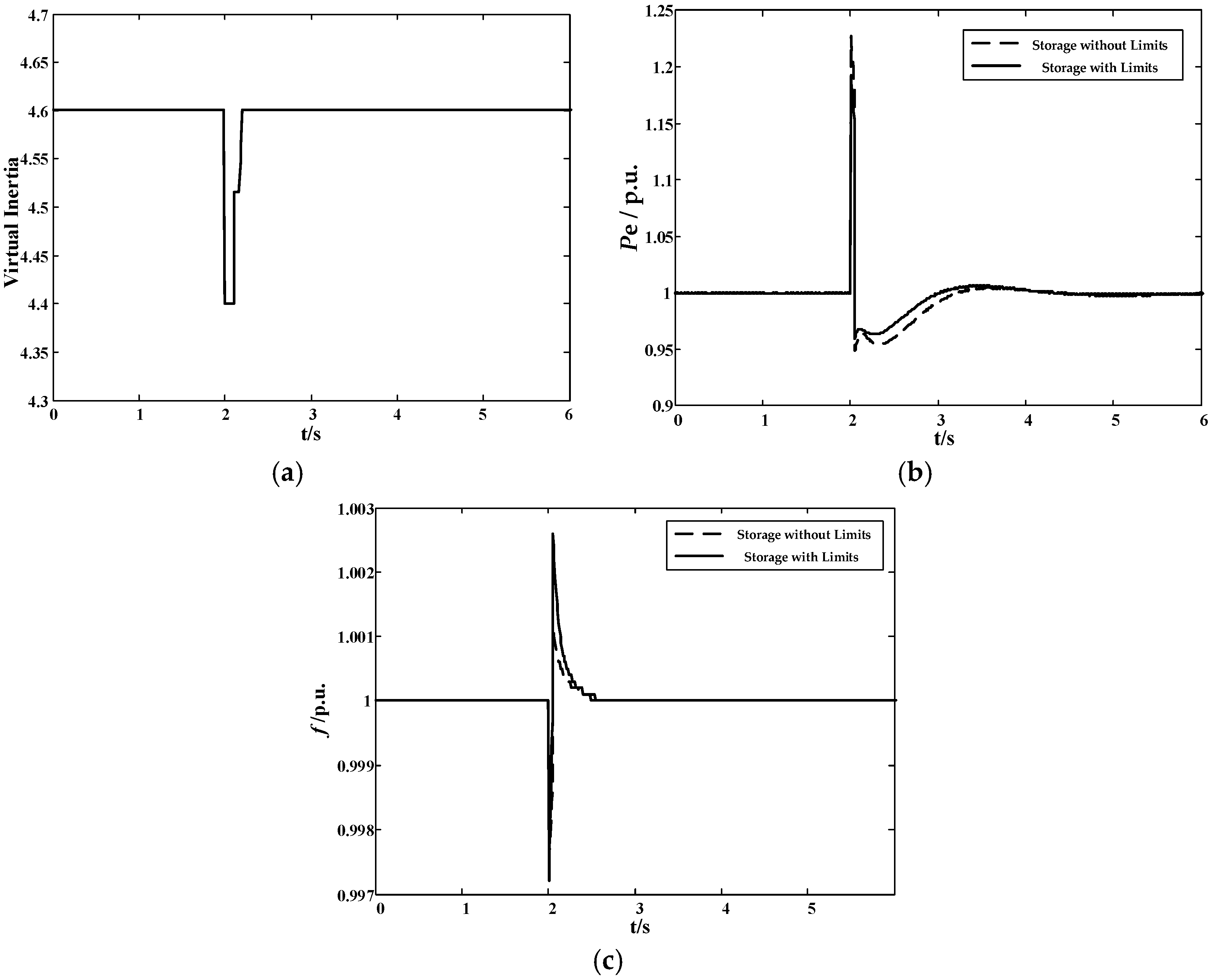
4.3. Comparison between VSG Equipped with Capacity-Limited and Limit-Free Storage Devices
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameters |
|---|---|
| Number of solar-cell arrays | 34 |
| DC power | 4590 kW |
| AC power | 3812 kW |
| Inverter model | Xantrex PV-150 |
| Number of inverter | 34 |
| Rated capacity of inverters | 157 kVA |
| Number of transformers | 11 |
| Rated power of transformers | 500 kVA |
| Turns ratio | 480 V/34.5 kV |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Udc | 700 V | Pm0 | 1 p.u. |
| Lf | 18 mH | xd | 0.42 p.u. |
| Cf | 10,000 uS | V0 | 0 p.u. |
| Zg | 5 Ohm | Vs | 1 p.u. |
| ω0 | 1 p.u. | Vt | 1 p.u. |
| Q | 1 | δ | 0.05 p.u. |
| f0 | 1 p.u. | Td0 | 6.2 |
| xdΣ | 0.77 p.u. | x’d | 0.77 p.u. |
| x’dΣ | 2.1 p.u. | x’qΣ | 5.4 p.u. |
References
- Mehrasa, M.; Godina, R.; Pouresmaeil, E.; Vechiu, I.; Rodriguez, R.L.; Catalao, J.P.S. Synchronous active proportional resonant-based control technique for high penetration of distributed generation units into power grids. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference Europe, Torino, Italy, 26–29 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Pouresmaeil, E.; Mehrasa, M.; Godina, R.; Vechiu, I.; Rodriguez, R.L.; Catalao, J.P.S. Double synchronous controller for integration of large-scale renewable energy sources into a low-inertia power grid. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference Europe, Torino, Italy, 26–29 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Mehrasa, M.; Adabi, M.E.; Pouresmaeil, E.; Adabi, J.; Bo, N.J. Direct Lyapunov control (DLC) technique for distributed generation (DG) technology. Electr. Eng. 2014, 96, 309–321. [Google Scholar] [CrossRef]
- Mehrasa, M.; Rezanejhad, M.; Pouresmaeil, E.; Catalão, J.P.S.; Zabihi, S. Analysis and control of single-phase converters for integration of small-scaled renewable energy sources into the power grid. In Proceedings of the Power Electronics and Drive Systems Technologies Conference, Tehran, Iran, 16–18 February 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 384–389. [Google Scholar]
- Beck, H.P.; Hesse, R. Virtual synchronous machine. In Proceedings of the International Conference on Electrical Power Quality and Utilization, Barcelona, Spain, 9–11 October 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 1–6. [Google Scholar]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Loix, T.; Breucker, S.D.; Vanassche, P.; Keybus, J.V.D.; Driesen, J.; Visscher, K. Layout and performance of the power electronic converter platform for the VSYNC project. In Proceedings of the IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–8. [Google Scholar]
- Chen, Y.; Hesse, R.; Turschner, D.; Beck, H.P. Comparison of methods for implementing virtual synchronous machine on inverters. In Proceedings of the International Conference on Renewable Energies and Power Quality, Santiago de Compostela, Spain, 28–30 March 2012; p. 6. [Google Scholar]
- Liu, J.; Miura, Y.; Ise, T. Dynamic characteristics and stability comparisons between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2014, 31, 1536–1543. [Google Scholar]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. Small-signal modelling and parametric sensitivity of a Virtual Synchronous Machine. In Proceedings of the Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–9. [Google Scholar]
- Karapanos, V.; Kotsampopoulos, P.; Hatziargyriou, N. Performance of the linear and binary algorithm of virtual synchronous generators for the emulation of rotational inertia. Electr. Power Syst. Res. 2015, 123, 119–127. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Power system stabilization using virtual synchronous generator with alternating moment of inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Distributed generation grid integration using virtual synchronous generator with adoptive virtual inertia. In Proceedings of the Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; IEEE: Piscataway, NJ, USA, 2013; Volume 8237, pp. 4546–4552. [Google Scholar]
- Chong, C.; Yang, H.; Zheng, Z.; Tang, S.; Zhao, R. Rotor inertia adaptive control method of VSG. Autom. Electr. Power Syst. 2015, 39, 82–89. [Google Scholar]
- Miguel, A.T.L.; Lopes, L.A.C.; Luis, A.M.T.; José, R.E.C. Self-tuning virtual synchronous machine: A control strategy for energy storage systems to support dynamic frequency control. IEEE Trans. Energy Convers. 2014, 29, 833–840. [Google Scholar]
- Wang, Y.; Cheng, D.; Liu, Y.; Li, C. Adaptive H∞ excitation control of multi-machine power systems via the Hamiltonian function method. Int. J. Control 2004, 77, 336–350. [Google Scholar] [CrossRef]
- Xi, Z.; Cheng, D.; Lu, Q.; Mei, S. Nonlinear decentralized controller design for multi-machine power systems using Hamiltonian function method. Automatica 2002, 38, 527–534. [Google Scholar] [CrossRef]
- Galaz, M.; Ortega, R.; Bazanella, A.S.; Stankovic, A.M. An energy-shaping approach to the design of excitation control of synchronous generators. Automatica 2003, 39, 111–119. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, D.; Hong, Y. Stabilization of synchronous generators with the Hamiltonian function approach. Int. J. Syst. Sci. 2001, 32, 971–978. [Google Scholar] [CrossRef]
- Qian, J.; Zeng, Y.; Zhang, L.; Xu, T. Hamiltonian modeling of generator integrated AVR and PSS. Procedia Eng. 2012, 31, 1217–1224. [Google Scholar] [CrossRef]
- Castro, G.; Bermúdez, J.; Jiménez, M.; Alvarez, M.; Arreaza, A. AVRs and PSSs revisited. In Proceedings of the International Conference on Electrical and Electronics Engineering, Bursa, Turkey, 26–28 November 2015; IEEE: Piscataway, NJ, USA, 2016; pp. 1006–1010. [Google Scholar]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: a survey and new perspectives. Int. J. Electr. Power Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- Wesenbeeck, M.P.N.V.; Haan, S.W.H.D.; Varela, P.; Visscher, K. Grid tied converter with virtual kinetic storage. In Proceedings of the IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–7. [Google Scholar]
- Albu, M.; Visscher, K.; Creanga, D.; Nechifor, A.; Golovanov, N. Storage selection for DG applications containing virtual synchronous generators. In Proceedings of the IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–6. [Google Scholar]
- Vassilakis, A.; Kotsampopoulos, P.; Hatziargyriou, N.; Karapanos, V. A battery energy storage based virtual synchronous generator. In Proceedings of the IREP Symposium Bulk Power System Dynamics and Control—IX Optimization, Security and Control of the Emerging Power Grid, Rethymno, Greece, 25–30 August 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Benidris, M.; Elsaiah, S.; Sulaeman, S.; Mitra, J. Transient stability of distributed generators in the presence of energy storage devices. In Proceedings of the North American Power Symposium, Champaign, IL, USA, 9–11 September 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–6. [Google Scholar]
- D’Arco, S.; Suul, J.A. Virtual synchronous machines—Classification of implementations and analysis of equivalence to droop controllers for microgrids. In Proceedings of the Powertech, Grenoble, France, 16–20 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–7. [Google Scholar]
- Ma, Y.; Yu, R.; Liu, H.; Zhao, S. The analysis of VSG control algorithm base on Hamiltonian system. Power Syst. Technol. 2017, 41, 2543–2553. [Google Scholar]
- Maschke, B.; Ortega, R.; van der Schaft, A.J. Energy-based Lyapunov functions for forced Hamiltonian systems with dissipation. IEEE Trans. Autom. Control 2000, 45, 1498–1502. [Google Scholar] [CrossRef]








© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Lin, Z.; Yu, R.; Zhao, S. Research on Improved VSG Control Algorithm Based on Capacity-Limited Energy Storage System. Energies 2018, 11, 677. https://doi.org/10.3390/en11030677
Ma Y, Lin Z, Yu R, Zhao S. Research on Improved VSG Control Algorithm Based on Capacity-Limited Energy Storage System. Energies. 2018; 11(3):677. https://doi.org/10.3390/en11030677
Chicago/Turabian StyleMa, Yanfeng, Zijian Lin, Rennan Yu, and Shuqiang Zhao. 2018. "Research on Improved VSG Control Algorithm Based on Capacity-Limited Energy Storage System" Energies 11, no. 3: 677. https://doi.org/10.3390/en11030677
APA StyleMa, Y., Lin, Z., Yu, R., & Zhao, S. (2018). Research on Improved VSG Control Algorithm Based on Capacity-Limited Energy Storage System. Energies, 11(3), 677. https://doi.org/10.3390/en11030677