1. Introduction
The establishment of microgrids is an efficient approach to accommodate distributed generation (DG) resources and increase the penetration of DG in the main power grid [
1,
2]. Microgrids generally include devices for generating energy from renewable sources (such as wind and photovoltaic power), small generation units (such as diesel and microturbine generators) and energy storage systems [
3,
4]. Many works have sought to develop the microgrid test bed. Consortium for Electric Reliability Technology Solutions (CERTS) microgrid concepts were first formulated in 1998 [
1], and Lasseter subsequently published an evaluation report for this test bed [
2]. Lasseter presented some crucial concepts concerning the CERTS microgrid test bed, such as embedding peer-to-peer and plug-and-play devices in the microgrid.
In a microgrid, power generation resources may include renewable energy and micro-turbine generators, while the battery energy storage system (BESS) enables bidirectional energy flow [
5]. The amount of electrical power generated from renewable sources of energy is uncertain because of their intermittence [
6]. The microturbine generator has a high-speed single-shaft design, in which the compressor and turbine are mounted on the same shaft as the permanent magnet synchronous generator [
7]. The microturbine generator can combine heat and provide electricity stably to local customers in microgrids [
8]. The BESS provides voltage support [
9] and regulates system frequency [
10,
11]. The BESS can be also used to mitigate fluctuations of the output power from PV arrays and wind farms [
12]. Sometimes, the BESS may incorporate a diesel or micro-turbine generator to filter the oscillating output power from renewables [
13,
14] and provide a seamless transition between standalone and grid-tied modes [
15].
The size of the BESS should be determined in the planning stage by considering different factors. Gitizadeh and Fakharzadegan [
16] considered the adoption of time-of-use pricing using mixed integer programming to implement load shifting and peak shaving. Maleki and Askarzadeh [
17] used a discrete version of harmony search to determine the number of PV panels, wind turbines, and batteries, which store excess energy for later use under deficit conditions. Ma et al. [
18] utilized the Hybrid Optimization Model for Electric Renewable (HOMER) software to study thousands of cases to determine an optimal autonomous system configuration in terms of system net present cost (NPC) and cost of energy (COE); the effects of the size of the PV panels, the size of the wind turbines and the capacity of the battery bank on economic performance of the system were examined [
19]. Ekren [
20] used a simulated annealing algorithm to determine the PV size, area swept by wind turbine rotors and battery capacity that minimized the total cost of a hybrid energy system. Ekren [
21] optimized the size of a PV/wind integrated hybrid energy system with battery storage under various loads and the unit cost of auxiliary energy sources using the commercial software, OptQuest; the results of the optimization were confirmed using Loss of Load Probability (LOLP) and autonomy analysis. Mohammadi [
22] proposed a two-stage scenario-based programming model, whose first stage prescribed the here-and-now variables (i.e., binary variables for the statuses of generation units) and whose second stage optimized the values of the wait-and-see variables (i.e., continuous variables for the amounts of power generations) under cost minimization, with the purpose of determining the size of the BESS to accumulate energy when production exceeded demand to make it available at the request of the users. Quevedo and Contreras [
23] explored the best locations of both BESS by optimizing distribution system costs taking into account network constraints. Han et al. [
24] proposed a method to minimize the total power capacity of candidate energy storage facilities when the availability of existing flexible resources is maximized.
This paper proposes a novel method for determining the capacity of the BESS in an islanded microgrid, considering both steady-state and dynamic constraints. The BESS (1) improves reliability [
25,
26]; (2) stabilizes transients [
27]; and (3) reduces load shedding [
28]. The studied problem herein is expressed as a multi-objective optimization that involves the dynamic equations of the power system. The dynamic equations are related to the transients that are caused by an outage of a large micro-turbine generator. When the large micro-turbine generator outage occurs, partial loads are shed by underfrequency relays to prevent blackout. The decision variables are the numbers of batteries at different candidate buses and the amounts of the loads shed in different stages of the under-frequency relays [
28]. An immunity-based algorithm, called the Chaos Clonal Evolutionary Algorithm [
29], is utilized to optimize the four objectives to gain the Pareto optimums. The contributions of this paper are summarized as follows:
- (a)
The proposed method considers both steady-state and dynamic constraints in the multiobjective optimization; however, existing methods only considered steady-state constraints when BESS planning was considered [
16,
17,
18,
19,
20,
21,
22,
23,
24]. Time-domain transient-state constraints are considered in the proposed method to set the underfrequency relays. A co-simulation method is implemented in this paper.
- (b)
Traditional methods only addressed the cost of BESS rather than reliability in the bulk power system/microgrid expect for [
22,
23]. Instead of whole system indices adopted in [
22,
23], this work considers a reliability index at a specific customer.
- (c)
Four objective functions are optimized: minimum of energy storage capacity, minimum of load shedding, maximum of the lowest swing frequency, and minimum of the Customer Average Interruption Duration Index (CAIDI). The Pareto optimums are explored and optimality of the problem is investigated.
- (d)
Comparative studies verify that the optimal solution obtained by the proposed immunity-based algorithm is better than that by the traditional genetic algorithms (GA).
The rest of the paper is organized as follows:
Section 2 presents a detailed description and formulation of the problem.
Section 3 presents the proposed method, which involves chaos clonal evolutionary programming.
Section 4 presents the results of simulations that concern the Pareto frontier.
Section 5 draws conclusions.
2. Problem Description, Modeling and Formulation
At the planning stage, the new BESS is used to enhance the reliability of a power system and provides energy to maintain the system frequency in case of an emergency. The reliability is related to the steady-state condition and the variation of the system frequency is obtained by solving the aforementioned dynamic equations.
2.1. Reliability
Installation of a new BESS can enhance the reliability of the microgrid. Reliability is a measure of the quality of power supply in an electric power system [
30]. Many reliability indices for power systems are used. Since the microgrid supplies electric power from existing renewables and microturbines directly to local customers, the System Average Interruption Frequency Index (SAIFI), the System Average Interruption Duration Index (SAIDI) and the customer average interruption duration index (CAIDI), rather than LOLP, Ref. [
31] are discussed herein. SAIFI is the average number of interruptions (occurrence/year) that a customer experiences, and is expressed as:
where
and
NT are the failure rate (occurrence/year), the number of customers at location
, and the total number of customers served, respectively. SAIDI, on the other hand, is the average outage duration (h/year or min/year) for each customer served, and is defined as follows:
where
is the annual outage time (h or min per year) at location
. Finally, CAIDI (h or min per occurrence) is defined by:
When new energy systems are considered, their failure rates and annual outage times and number of BESS will have an impact on CAIDI. A smaller CAIDI indicates better reliability.
2.2. Underfrequency Load Shedding
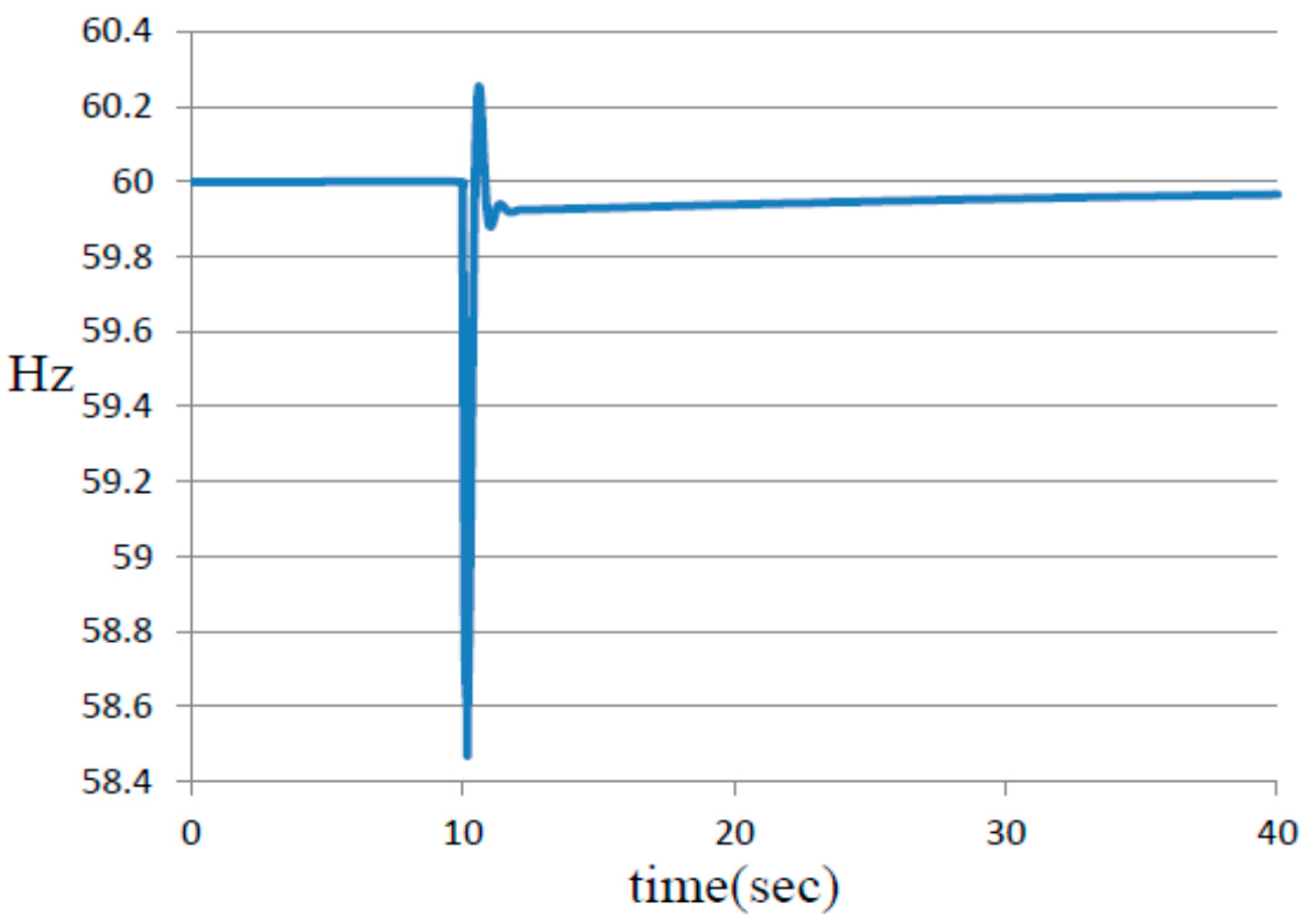
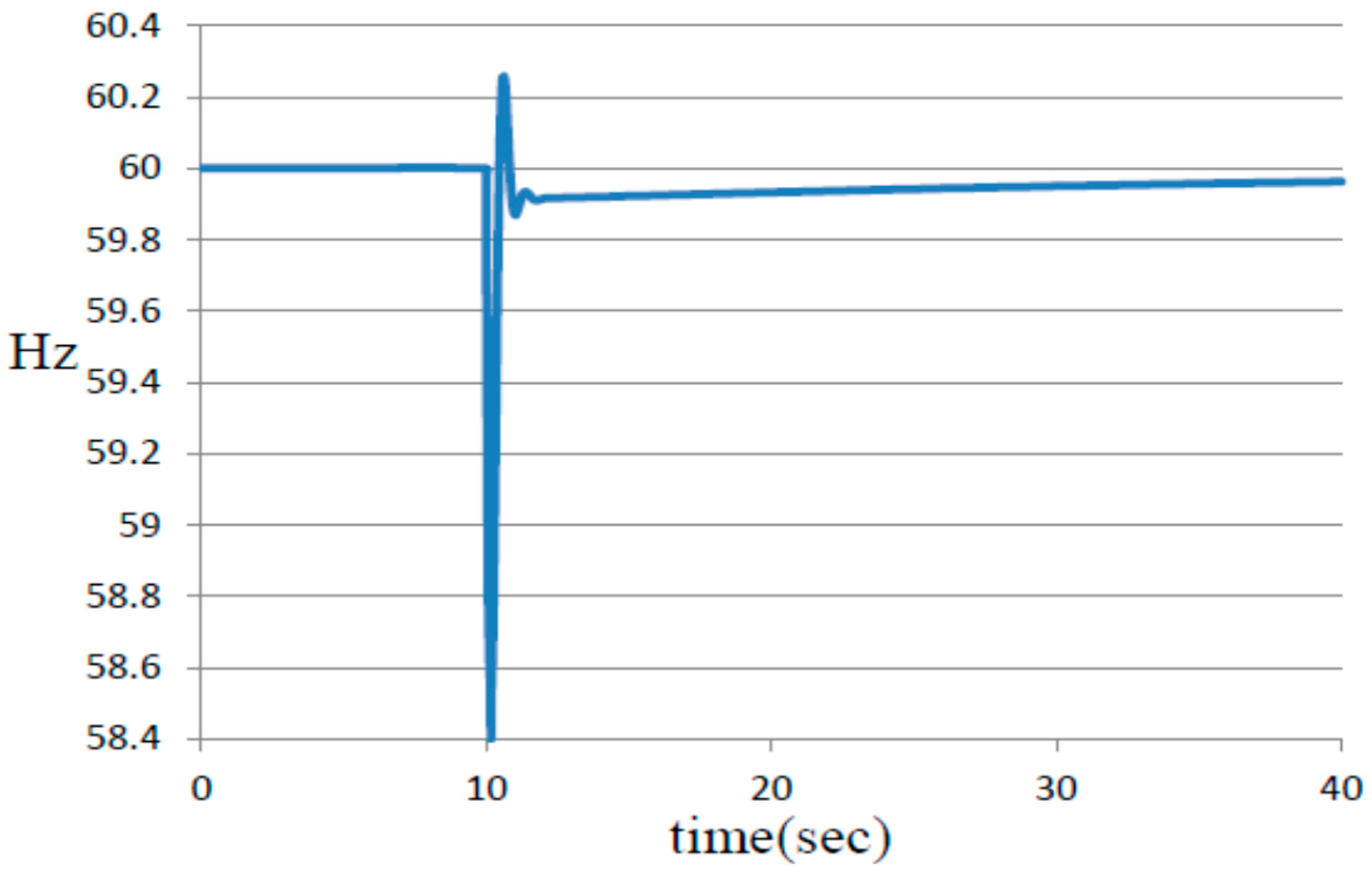
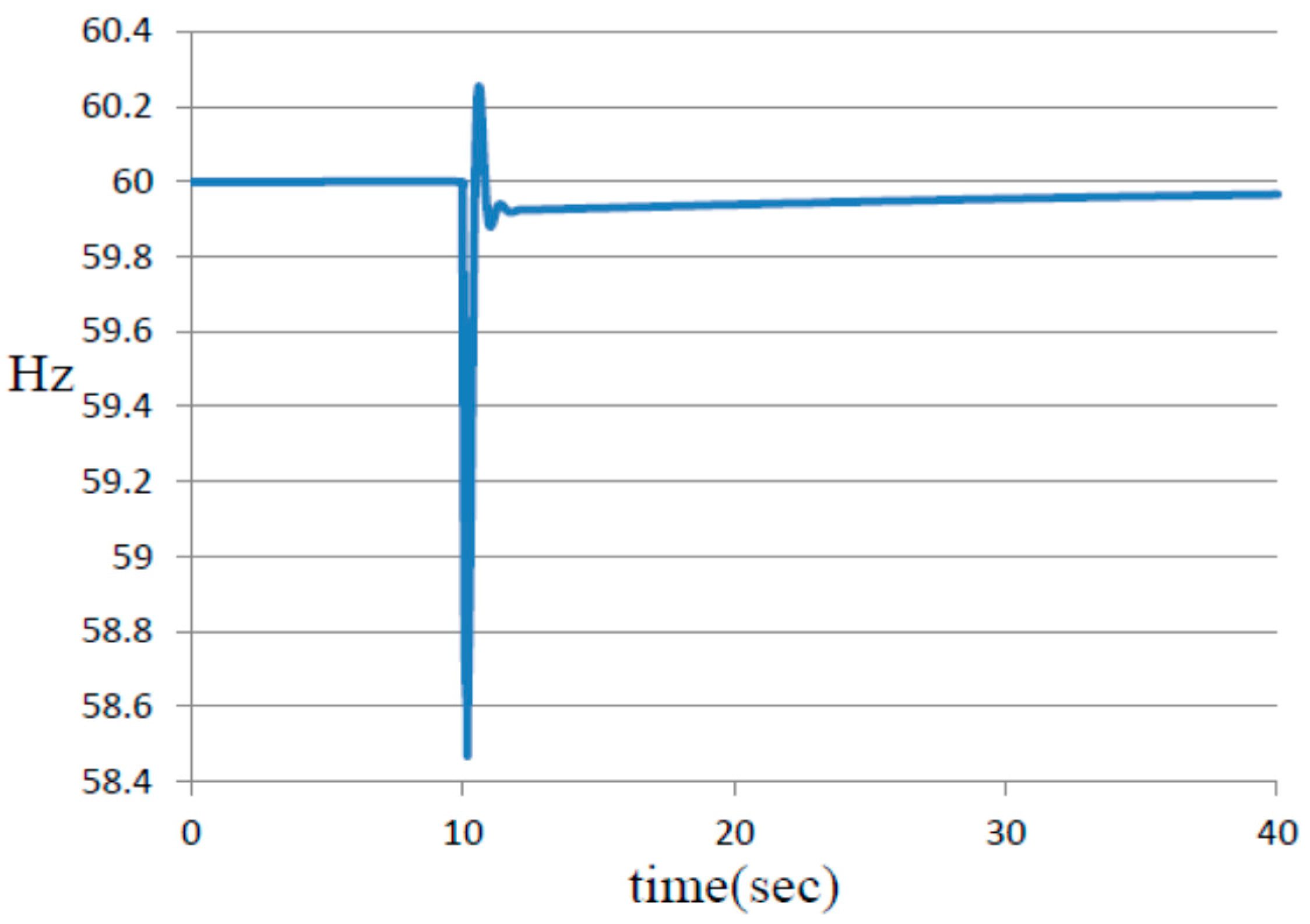
The microgrid should be operated with a nominal frequency of 50 or 60 Hz. When a critical component outage occurs, e.g., a loss of a large micro-turbine generator, the system frequency decreases because the power generation instantaneously drops below demand. If no action (such as partial load shedding) is taken, then the blackout is likely to occur in the microgrid. Thus, the underfrequency relay must be used to shed partial system load to prevent the system from blackout [
32].
The parameters of an underfrequency relay are the amount of load shed at specified frequencies, such as 58.8, 58.2, 57.6, …, and 54.6 Hz in eight stages. Since the BESS can provide excess energy to the system loads in an emergency (when the frequency falls), this work determines the capacity of the BESS and each amount of load shed in various stages of underfrequency relays.
The system frequency is calculated by solving both the linearized network equations and the dynamic equations for the microgrid. This will be explained in the next section.
2.3. System Frequency
Dynamic responses of a traditional power system can be expressed by linearized network (power flow) equations and many differential equations for generators that depend on the models of the exciters and the governors [
33]. For a microgrid, the distributed generation resources are generally implemented using an inverter-based control [
34]. The nonlinear system equations for the microgrid can be linearized around a nominal operating point to yield a set of linearized system equations in matrix form:
where
and
are the state vector, the output vector and the external or compensated input vector and
A,
b and
c are all constant matrices (vectors) of appropriate dimensions. The state vector in Equations (4) and (5) can be partitioned into two substate vectors as
,
where
and
are referred to as the system state vectors of the inverter-based distributed generation (DG) and the local load, respectively. One of the elements in
is the system frequency; other elements include line flows and power injections.
Because the system frequency mainly depends on the operation of gas-turbine governor, power converter (inverter), and energy storage system, their models will be detailed in the following subsections. These models are implemented in the software NEPLAN 5.5.0 (NEPLAN AG, Zürich, Switzerland) [
35], which computes the system frequency and CAIDI in the co-simulation.
2.4. Gas Turbine Model
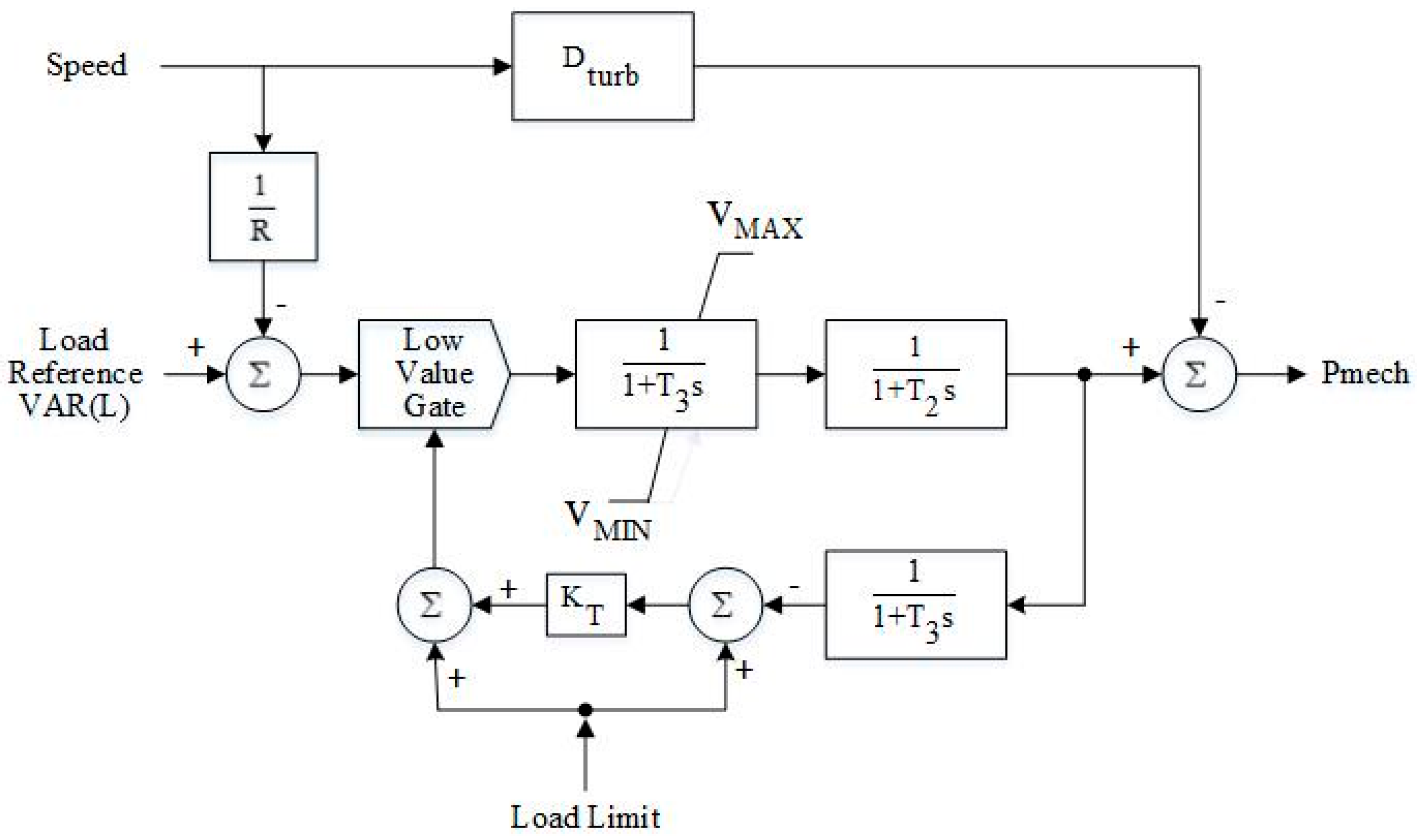
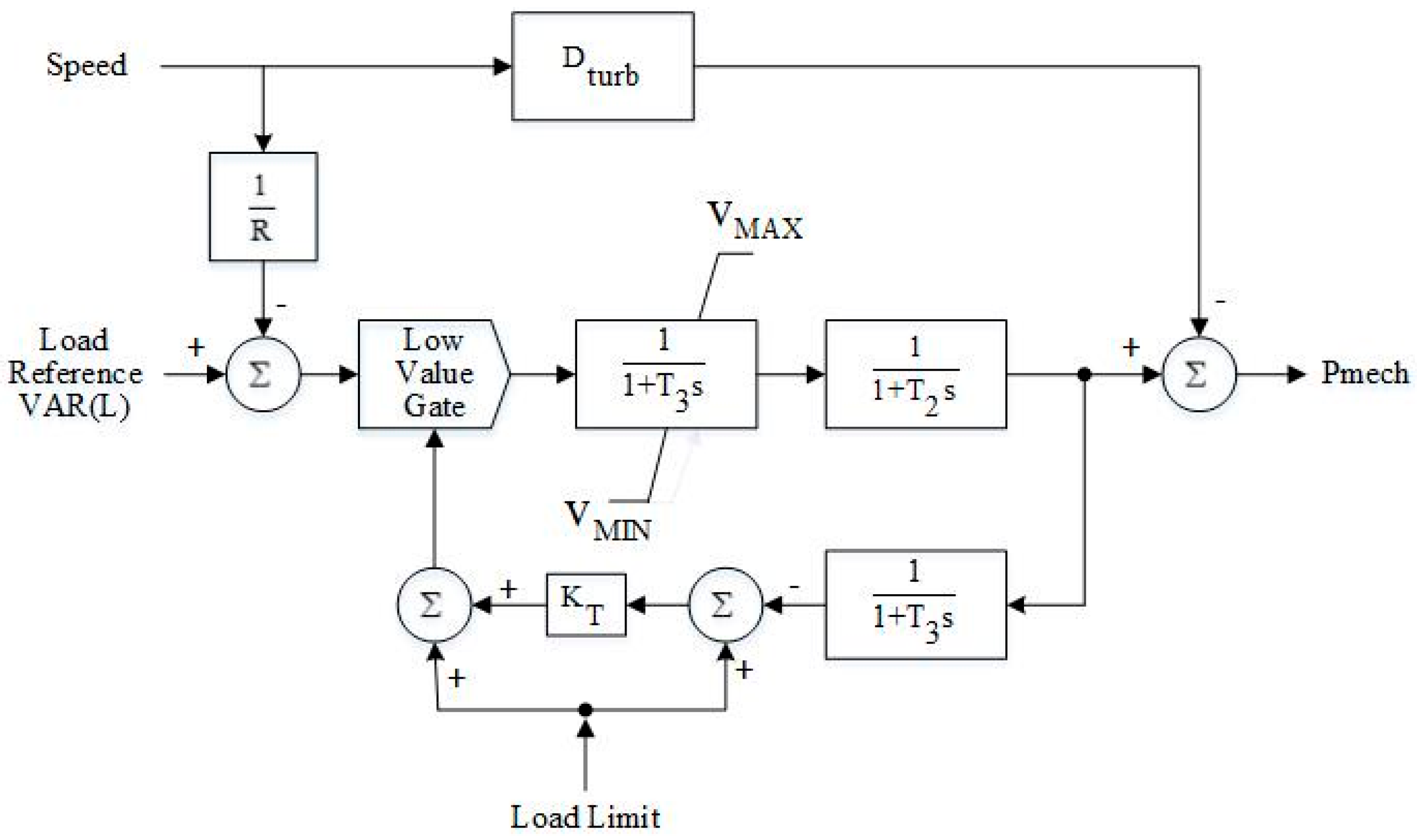
The governor of gas turbine has a great impact on the system frequency. The gas turbine consists of a turbine, an axial compressor, and a combustion chamber. The air supporting the combustion process is compressed via the axial compressor. This air is then mingled with fuel in the chamber.
Figure 1 illustrates this model comprising droop control and three time constants: T1, T2 and T3 mean the fuel valve response, turbine response, and load limit response, respectively [
36].
2.5. Converter
Types of converters include rectifiers and inverters, which can be modeled using the following equations [
35]:
and
denote the DC and AC voltages of the converter, respectively.
and
represent the real and reactive powers at the AC terminal, respectively.
is the DC power at the DC terminal.
and
are the converter AC and DC currents, respectively.
B signifies the number of bridges.
is the commutating reactance. The symbols
and
α mean the power factor angle and rectifier firing angle, respectively.
If the rectifier is in its current control mode, a voltage margin of approximate 3% is maintained. If the firing angle is kept within [5°, 7°], then 14° ≤ α ≤ 16°. If the controlled AC voltage of the rectifier is too low, the inverter will be switched to the current control mode.
2.6. Lithium-Ion Model
Lithium-ion batteries are adopted for the energy storage system. Let
and
be the battery terminal and internal voltages, respectively. The parameter R and variable
i are the internal resistance and current, respectively. The discharge and charge modes of this energy storage system can be formulated by Equations (11) and (12) as follows [
35]:
where
K and
Q denote the polarization constant (V/Ah) and capacity (Ah), respectively. Parameters
A and
D signify the exponential zone amplitude (V) and inverse of exponential zone time constant (1/Ah), respectively. Also,
IT =
2.7. Problem Formulation
Let the variable
be the vector of the shed load in the eight stages, [
p1,
p2,
…,
p8]. The variable
represents the vector of the numbers of batteries at all candidate buses, [
n1,
n2,
…,
nc,
…,
nC], where
C is the number of candidate buses for the BESS installation. The variable
is the number of batteries at candidate bus
c. Let objectives
be the number of batteries, CAIDI (see Equation (3) in
Section 2.1), the lowest swing frequency (see Equation (5) in
Section 2.3) and the total shed load, respectively. According to the above discussions in
Section 2.1,
Section 2.2,
Section 2.3,
Section 2.4,
Section 2.5 and
Section 2.6, the studied problem can be expressed as follows:
subject to:
and Equations (4) and (5) incorporating with Equations (6)–(12).
The term is the maximum allowed shed load; and represent the maximum and minimum values of , respectively. The terms , and are constants while the decision (unknown) variables are those specified in terms of Equation (17) implies that the total shed loads in the eight stages should not exceed , which is generally set to 30% of the peak load. Equation (18) indicates that the number of batteries at candidate bus c must not exceed due to available space at the substation; is zero generally.
The lowest swing frequency in should be as high as possible while the other objective values in are minimized. Notably, cannot be expressed in a closed form and must be obtained from Equations (4) and (5); moreover, cannot be formulated explicitly, either. When solving the dynamic equations (Equations (4) and (5)), the models of converters (Equations (6)–(10)) and lithium-ion batteries (Equations (11) and (12)) will be considered.
The relay engineers will locate proper feeders with loads close to [p1, p2, …, p8]. The scenario with the largest peak load is taken as the studied case at the planning stage. This implies that the shed loads of other scenarios are only a fraction of that obtained for the studied case with the largest peak load.
2.8. Pareto Optima
The above problem, given by Equations (4)–(18), cannot be solved directly owing to the multi-objectives in Equations (13)–(16). A multi-objective problem does not have a unique optimal solution but it does have numerous Pareto optimums. Proper weighting factors of the objectives can be used to obtain one of the Pareto optimal solutions. These weighting factors can be estimated from preferred values of the objective functions (see below). The decision-maker may alter the preferred values if the obtained Pareto optimal solution is not satisfactory. In general, Pareto optimums comprise numbers of results, which specify a Pareto frontier.
This work employs the concept of the least upper bound to attain the optimal solution by solving the min-max problem, which is defined as . The term is the weighting factor for the objective , = 1, 2, 3, 4 and are the values preferred by the decision-maker.
The min-max problem can be reformulated equivalently using the concept of the least upper bound, as follows [
37,
38]:
subject to:
and Equations (4)–(12), (17) and (18).
The term
Z is the least upper bound for the multi-objectives. The weighting factors can be estimated as follows [
37,
38]:
The multi-objective problem described in
Section 2.7 becomes a single objective problem (i.e., least upper bound
Z with respect to four individual objectives). Different preferred
correspond to various
Each optimal solution is on the Pareto frontier according to [
37,
38].
3. Proposed Method
Equations (4)–(21) describe a multi-objective optimization problem with both steady-state and dynamic constraints. Traditional optimization methods that are based on the gradient or second derivatives cannot be used for at least three reasons: (i) the decision variables consist of both integer (i.e., [
n1,
n2, …,
nc, …,
nC]) and continuous (i.e., [
p1,
p2,
…,
p8]) variables; (ii) four objectives Equations (13)–(16) cannot be expressed explicitly; and (iii) Equations (4) and (5) are dynamic constraints. In this paper, the Chaos Clonal Evolutionary Algorithm [
29] is utilized to optimize the four objectives to yield the Pareto optimums of the multi-objective optimization problem. The Chaos Clonal Evolutionary Algorithm is an immunity-based approach utilizing antibodies to conduct genetic chaos and clone operations.
3.1. Identification of Antigen/Antibody
As described above, the proposed algorithm is an immunity-based algorithm, in which the objective function incorporating constraints, Equations (4), (5), (17), (18) and (20), are used as the antigens while feasible decision variables, i.e., Z, [n1, n2, …, nc, …, nC] and [p1, p2, …, p8], are the antibodies. An antibody is like a string of many numbers. Let = [ai1, ai2, …, aij, …, aiJ)] (that’s, [Z, n1, n2, …, nc, …, nC, p1, p2, …, p8] be the i-th antibody where J = 1 + C + 8. Since the proposed method is a population-based method, suppose that NA antibodies are needed for iterations. Since the chaotic search is used, all elements in are normalized to be within [0, 1].
3.2. Initialization of Antibodies
The chaotic search has better capability to escape from local optima than the random search, because of the ergodic chaos sequence, which is produced by the logistic map. Let
and
c1 be any antibodies in sequence
s and a given chaos parameter, respectively. Sequence
s is regarded as antibody
s in this work. The logistic equation, which is a deterministic system with
= 0, is defined as follows:
The elements bound within [0, 1] in the chaos sequence , s = 1, 2, …, NA, are mapped onto their corresponding real values. The first eight elements are discretized to their nearest integers satisfying Equation (18).
3.3. Antigen Affinity and Antibody Affinity
In order to measure the performance of antigen and antibodies, the concept of affinities is used herein. The objective
Z in Equation (19) is utilized as the antigen affinity while the following Equation (23) is employed to measure the coherency among antibodies serving as the antibody affinity:
For a minimization problem, a small antigen affinity means high feasibility of the corresponding the antibodies. The initial antibodies should be diverse in order to cover all feasible solutions; thus antibody affinities are initially as large as possible.
3.4. Clone Operation
Clone means “duplication” or “cell division”. For a given antibody, the clone operation reproduces identical antibodies according to its antigen affinity in Equation (19) and its antibody affinities in Equation (23). The number of clones (
nci) of a feasible antibody
is estimated as follows:
where INT(˙) is a rounding-off function;
Z(
) is the Z that corresponds to
and
is a constant (100 in this paper) that exceeds
NA. After the cloning operation, the new population size becomes
. Let
be
NC.
3.5. Genetic Chaos Operation
Chaotic search is a random movement with pseudo randomness, regularity and ergodicity, which is determined by a deterministic equation [
39]. A set of random sequences with the ergodicity and the pseudo randomness are generated through the chaos iteration.
In immunology, the maturity of an antigen and antibodies is determined by the mutation operation to achieve convergence. Let
rij be a random number of mutations for
aij. Then, each normalized component
aij in
i is mutated by the following chaos operation:
and:
Let t and T be the iteration index and the expected maximum number of iterations, respectively. Parameters c1, c2 and c3 are constants. The following comments elucidate the mutation operation in Equations (25)–(27):
- (i)
Equation (27) captures prior experience including information related to aij.
- (ii)
The values of Equation (26) is within [3.57, 4] and is the chaos parameter of the logistic sequence.
- (iii)
The term i/NC in Equation (25) specifies the mutation level as determined by the affinities.
- (iv)
The terms (1 − aij)/(c2 + c3) and aij/(c2 + c3) in Equation (25) ensure that is within [0, 1].
- (v)
The term in Equation (25) leads to significant mutations initially and moderate mutations near the end of the iterative process.
3.6. Penalty Factor and Genetic Roulette Wheel Selection
If any inequality constraint (
= 1, 2, 3, 4) in Equation (20) is violated during the iterations, a penalty term is added to the least upper bound in Equation (19) for subsequent genetic selection [
40]. Specifically, the penalty function for dealing with violated Equation (20) is defined as follows:
where
PF is called the “penalty factor” in this paper. Equation (28) implies that the penalty weight (
) is gradually increased as the number of iterations increases and has a moderate effect on the initial
Tp iterations. Roulette wheel selection [
40] is used to select the antibodies to perform the chaos operation. Hence, an antibody with a large least upper bound that is augmented with the penalty term will have few chances to be selected for further application of the chaos operation. Please note that the roulette wheel selection is applied to the least upper bound
Z rather than individual
3.7. Algorithmic Steps
In the above formulation,
= [
ai1,
ai2,
…,
aij, …, aiJ] (i.e.,
= [
Z,
n1,
n2,
…,
nc,
…,
nC,
p1,
p2,
…,
p8] are decision (independent) variables while CAIDI
, the lowest swing frequency
and the actual total shed load
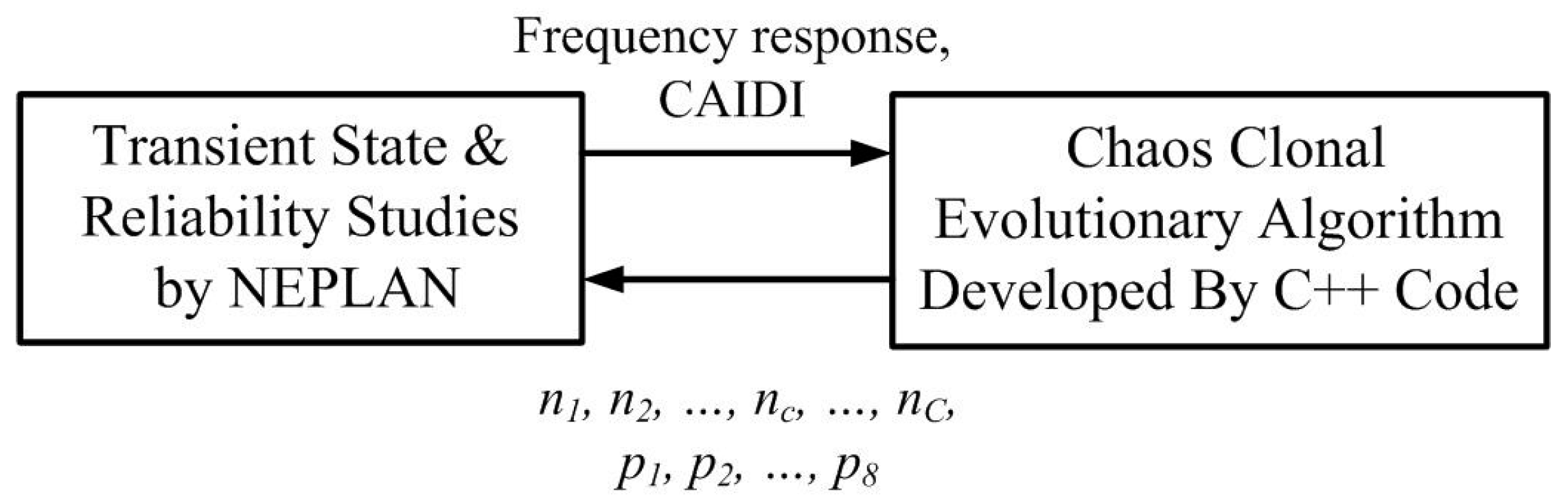
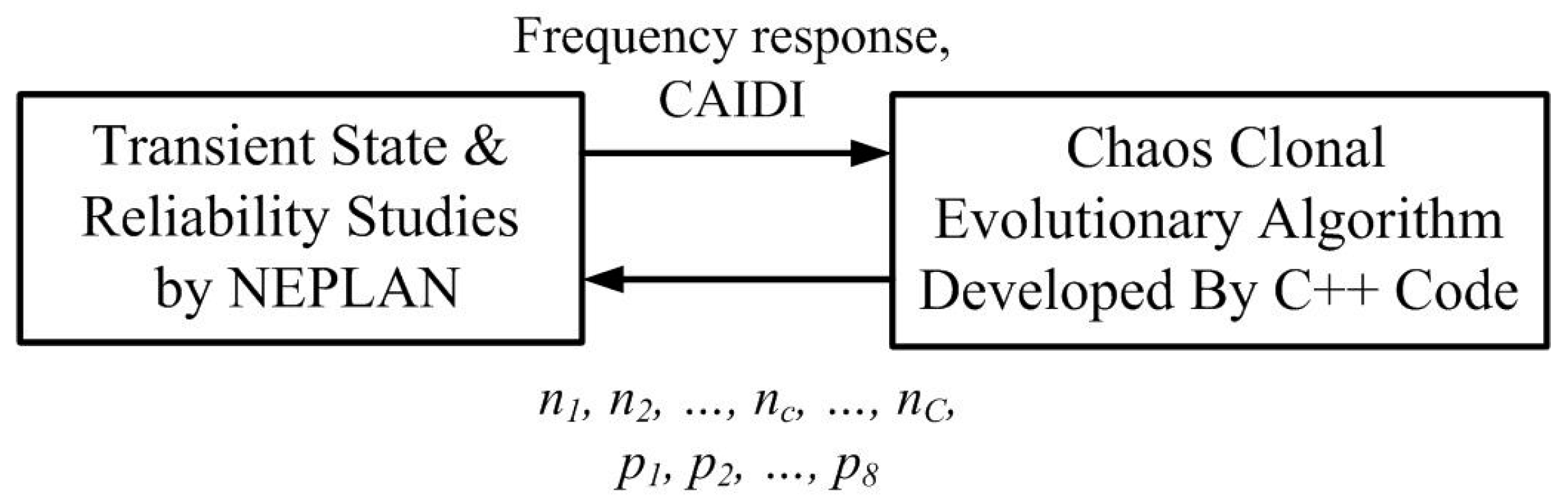
are dependent variables. The other parameters are all known. The chaos clonal evolutionary algorithm determines the values of the decision variables in each iteration. The commercial software NEPLAN 5.5.0, Country [
35] is used to evaluate
The chaos clonal evolutionary algorithm is developed using C++ code. The overall method was implemented using co-simulation, as shown in
Figure 2, as follows:
- Step 1:
Find and = 1, 2, 3, 4.
- Step 2:
Specify
,
= 1, 2, 3, 4, defined in
Section 2.7.
- Step 3:
Compute weighting factors for , = 1, 2, 3, 4, according to Equation (21).
- Step 4:
Generate feasible antibody , i = 1, 2, …, NA. (NA = 20 herein)
- Step 5:
Estimate antigen affinity (Z) and antibody affinity by Equation (23) for each i, i = 1, 2, …, NA.
- Step 6:
Conduct the clone operation by Equation (24).
- Step 7:
Execute genetic chaos operation by applying Equations (25)–(27) to reproduce feasible , i = 1, 2, …, NC.
- Step 8:
Let i = 1.
- Step 9:
Compute directly. are calculated using NEPLAN 5.5.0.
- Step 10:
If any inequality constraint in Equations (17) and (20) is violated, then calculate its penalty function by (28) and add this penalty function to the corresponding antigen Z.
- Step 11:
i = i + 1. If then conduct Step 12; otherwise go to Step 9.
- Step 12:
Select
NA mutated antibodies using the roulette wheel selection that is described in
Section 3.6.
- Step 13:
If the antibodies are not convergent for the given , = 1, 2, 3, 4, then go to Step 5.
- Step 14:
If the decision-maker is satisfied with the optimal antibody, then output this Pareto optimum; otherwise, go to Step 2.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}