Power-Split Hydrostatic Transmissions for Wind Energy Systems



Abstract
1. Introduction
2. Wind Turbine and Power Split Hydraulic Transmission
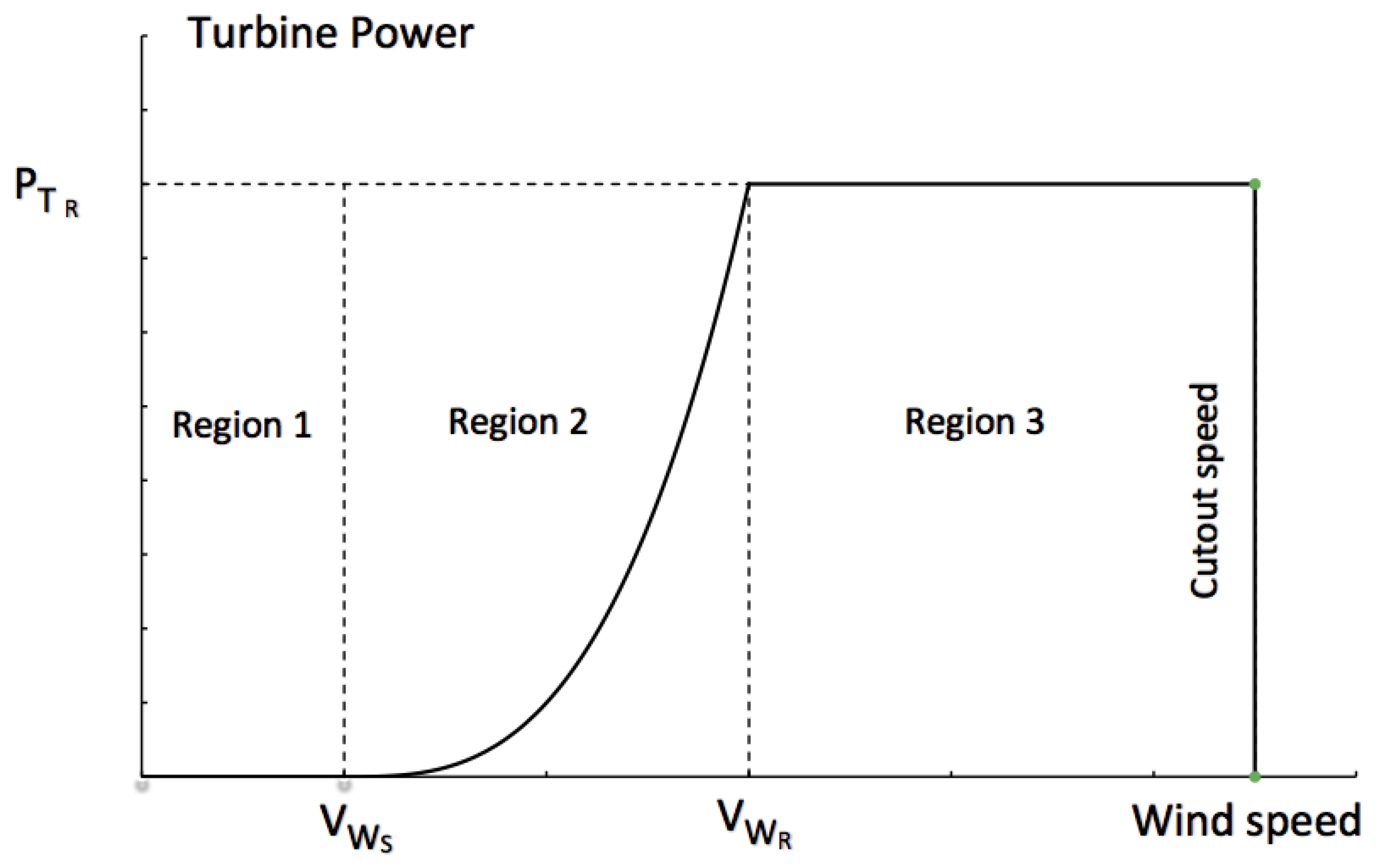
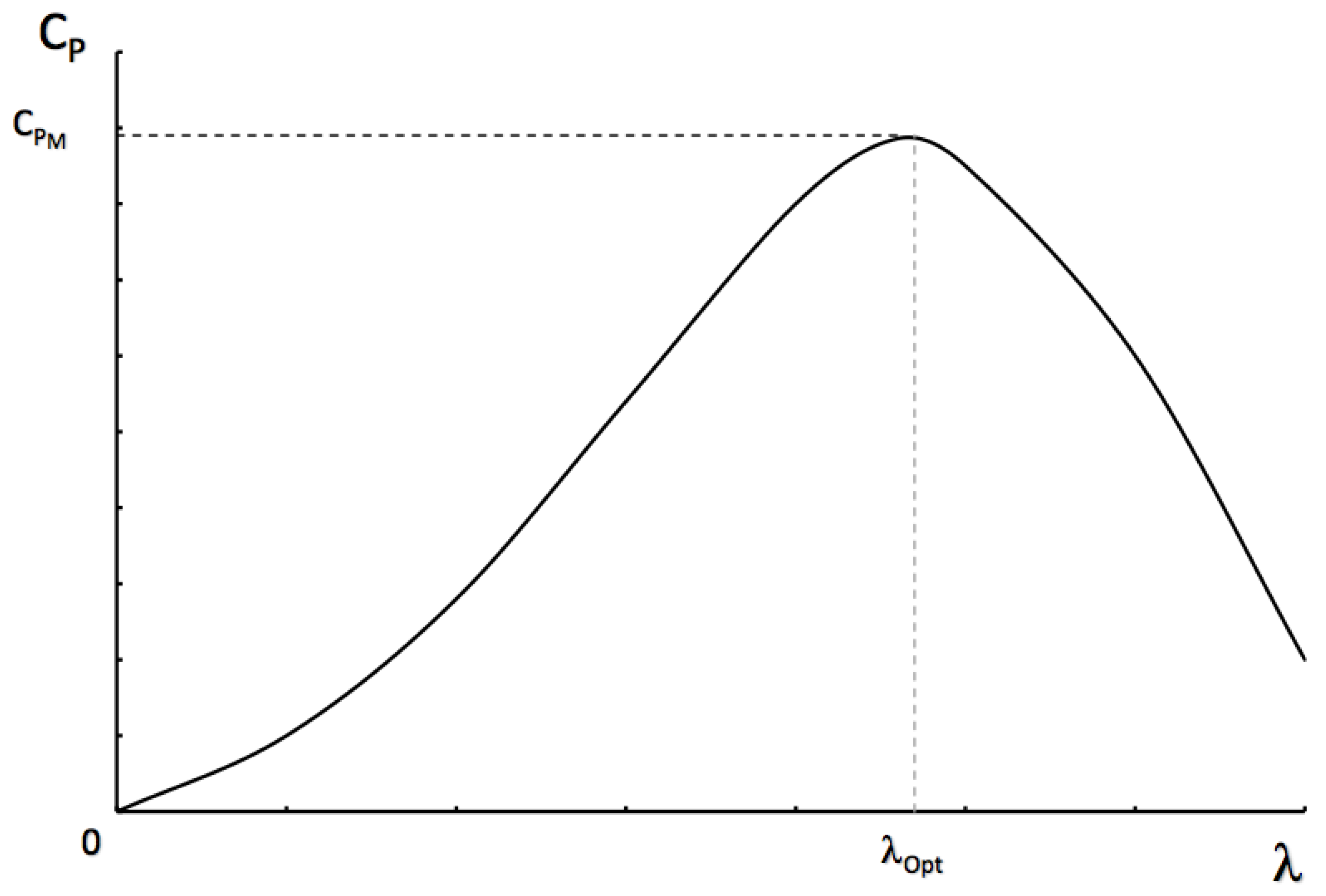
2.1. Wind Turbine System
2.2. Hydraulic Transmission Systems (HTS)
2.2.1. In-Line HTS Configuration
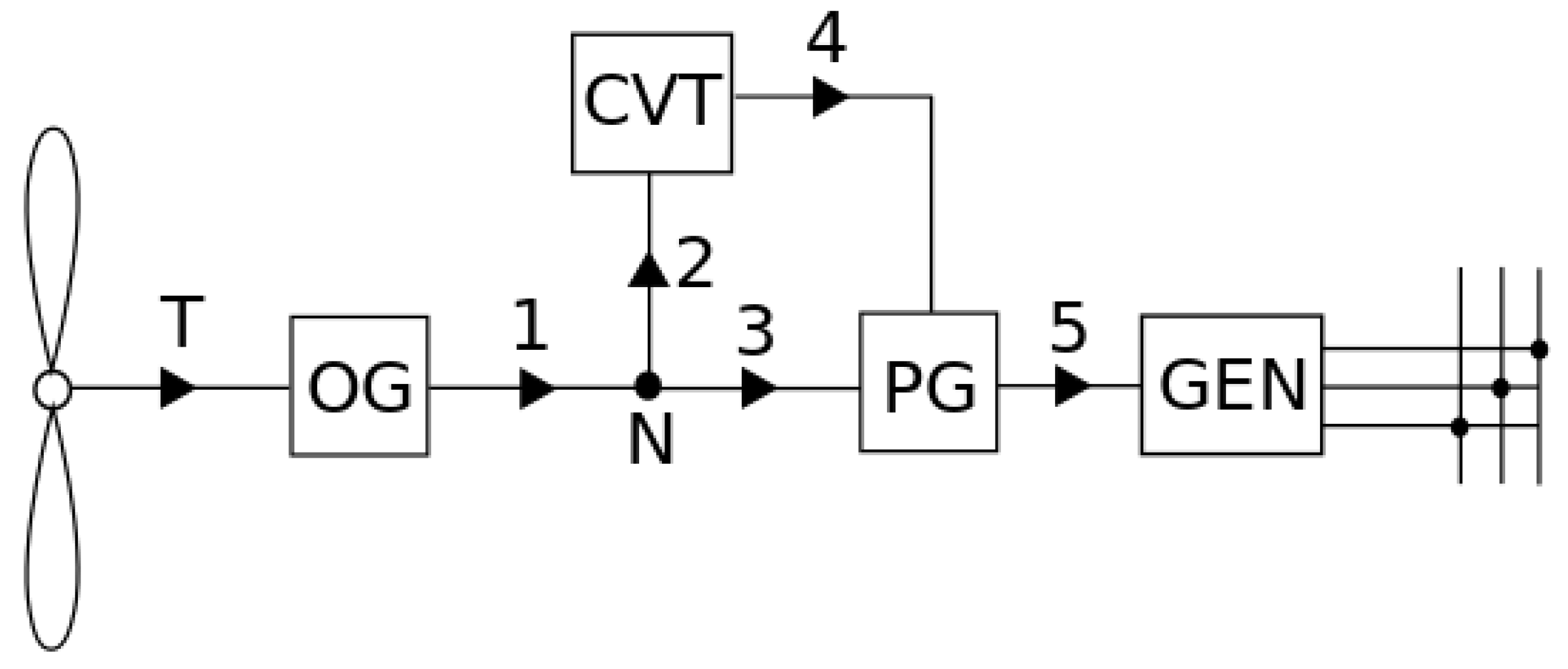
2.2.2. PS-HTS Configuration
3. Numerical Application
3.1. Characteristics of the Wind Turbine and the Powertrains
3.1.1. Wind Turbine Data
3.1.2. HTS and Powertrain Data
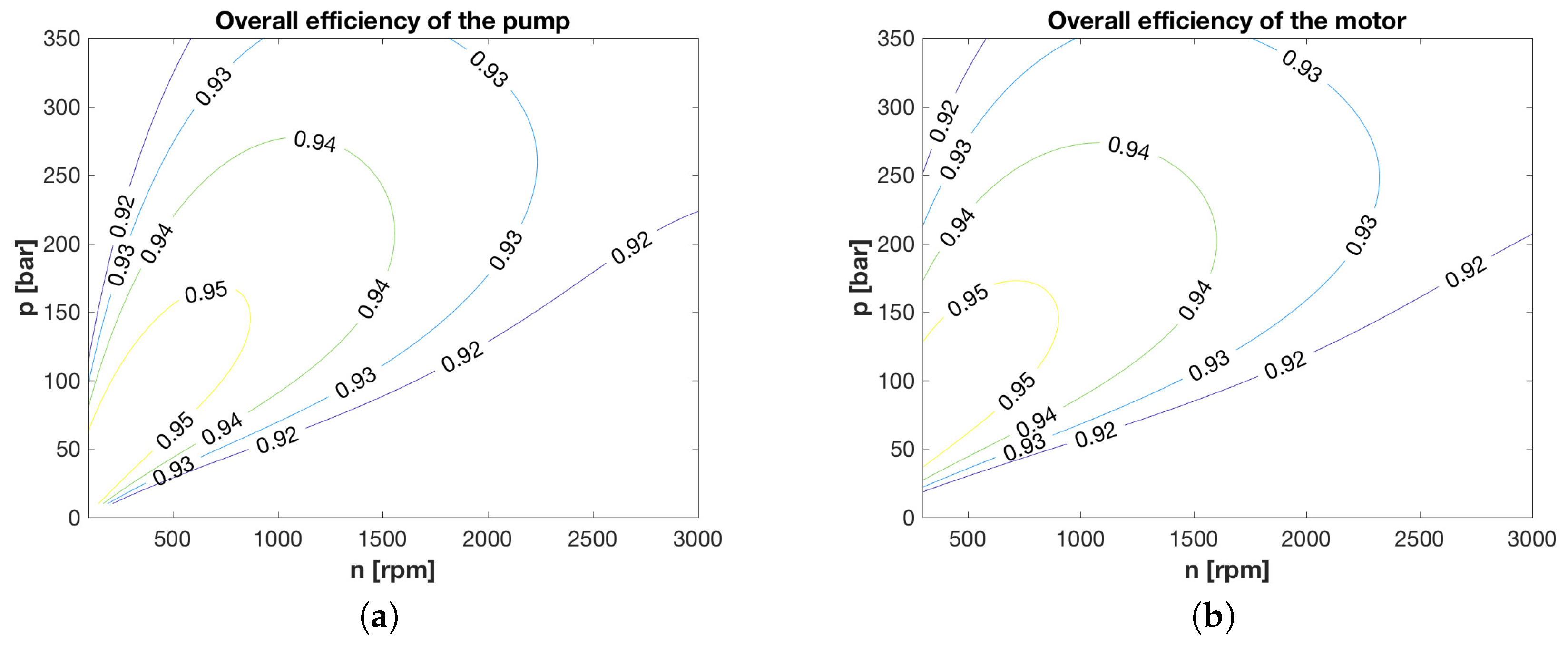
3.2. Results and Discussion
4. Conclusions
- By means of the power split architecture, it is possible to downsize the hydrostatic transmission. For instance, if a wind turbine with the characteristics summarized in Table 1 is considered, the needed pump and motor displacements are reduced from to ; thus, the hydrostatic transmission is much smaller and cheaper (even though an additional planetary gear box must be considered).
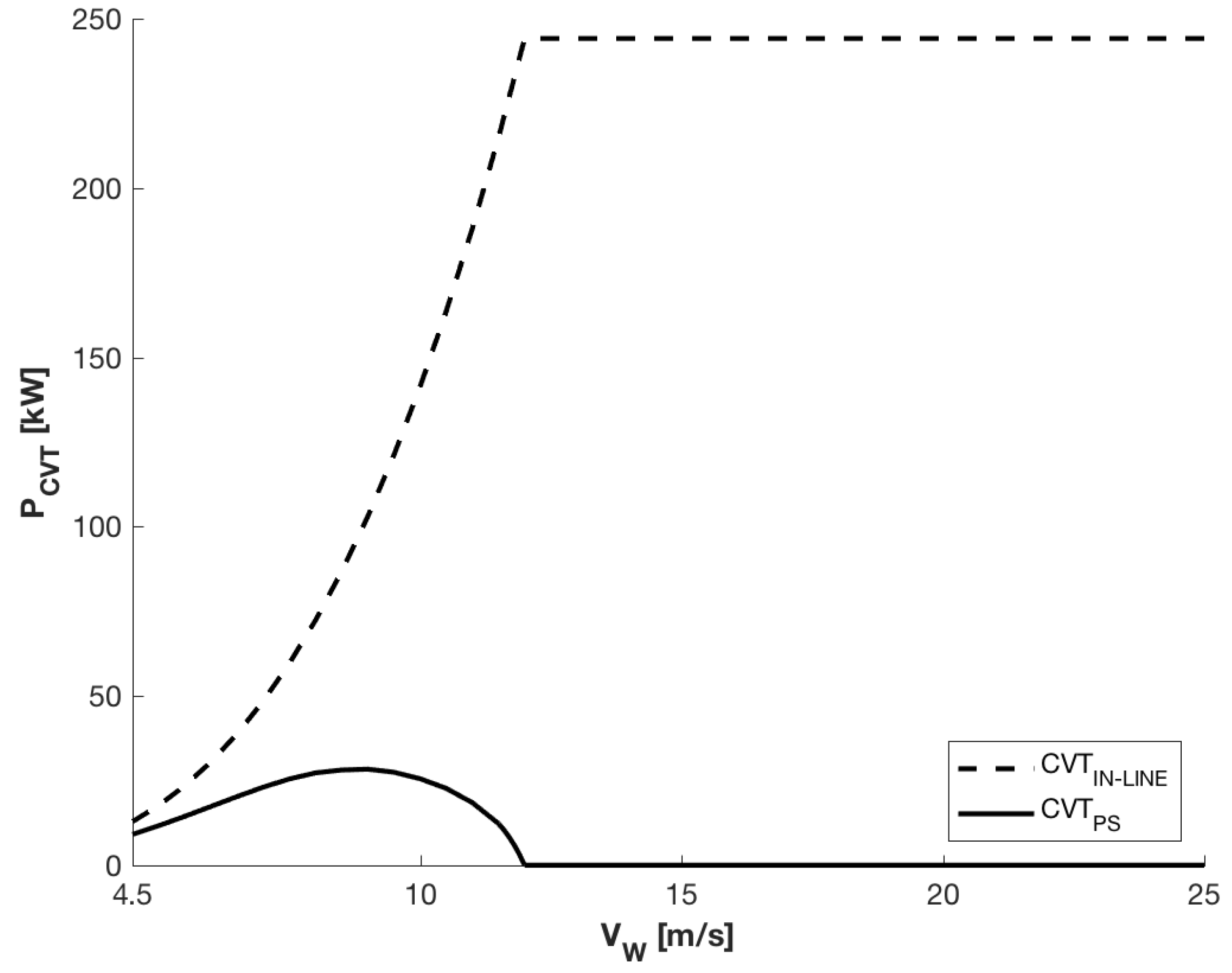
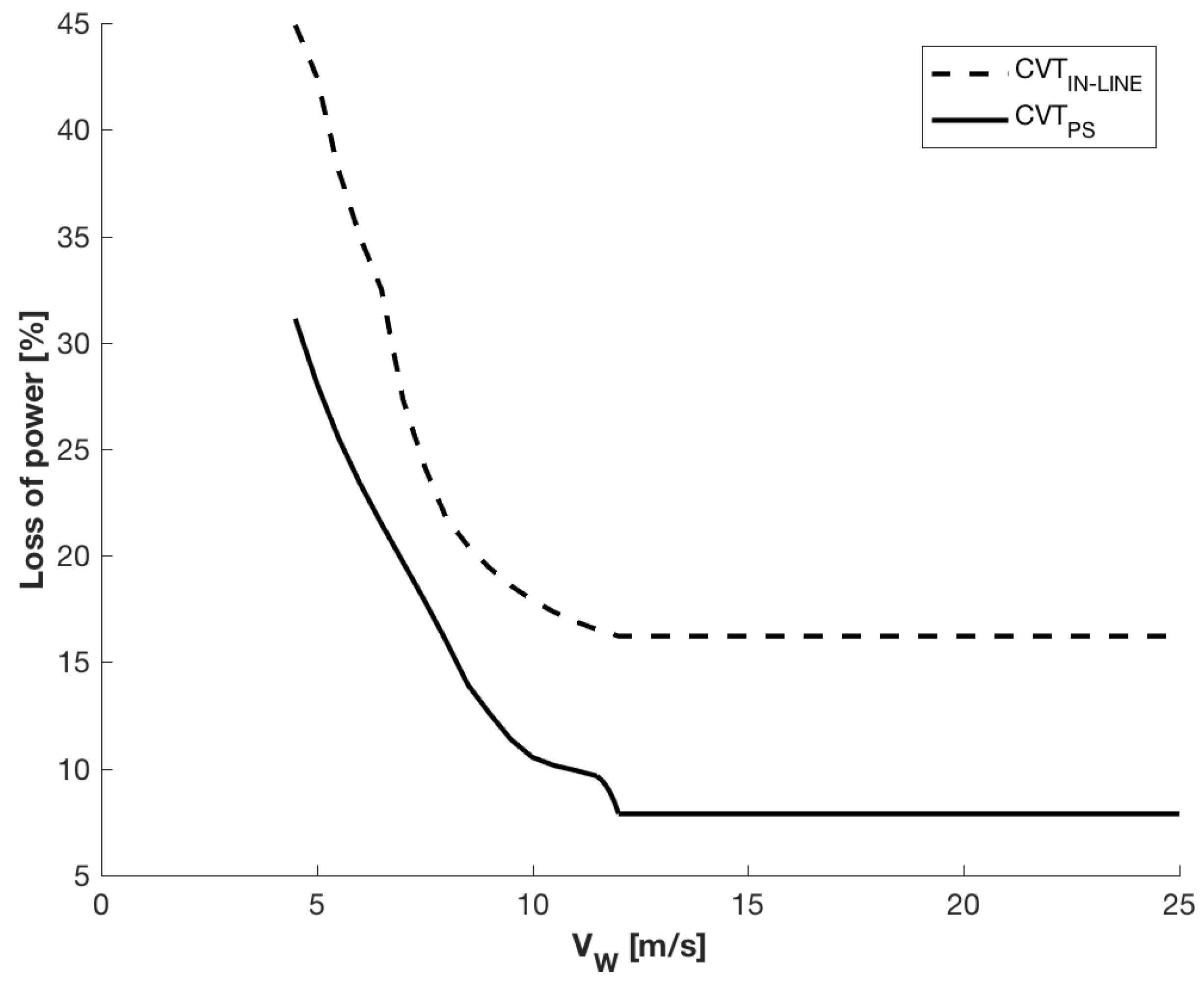
- In the power split architecture, only a small fraction of the power (max 10–11%) goes across the hydrostatic transmission; thus, the overall power loss is smaller, in particular, at the rated power (the power loss is about one-fourth). In principle, a 100 kW HTS can be used in a 1 MW wind turbine thanks to the power split mechanism.
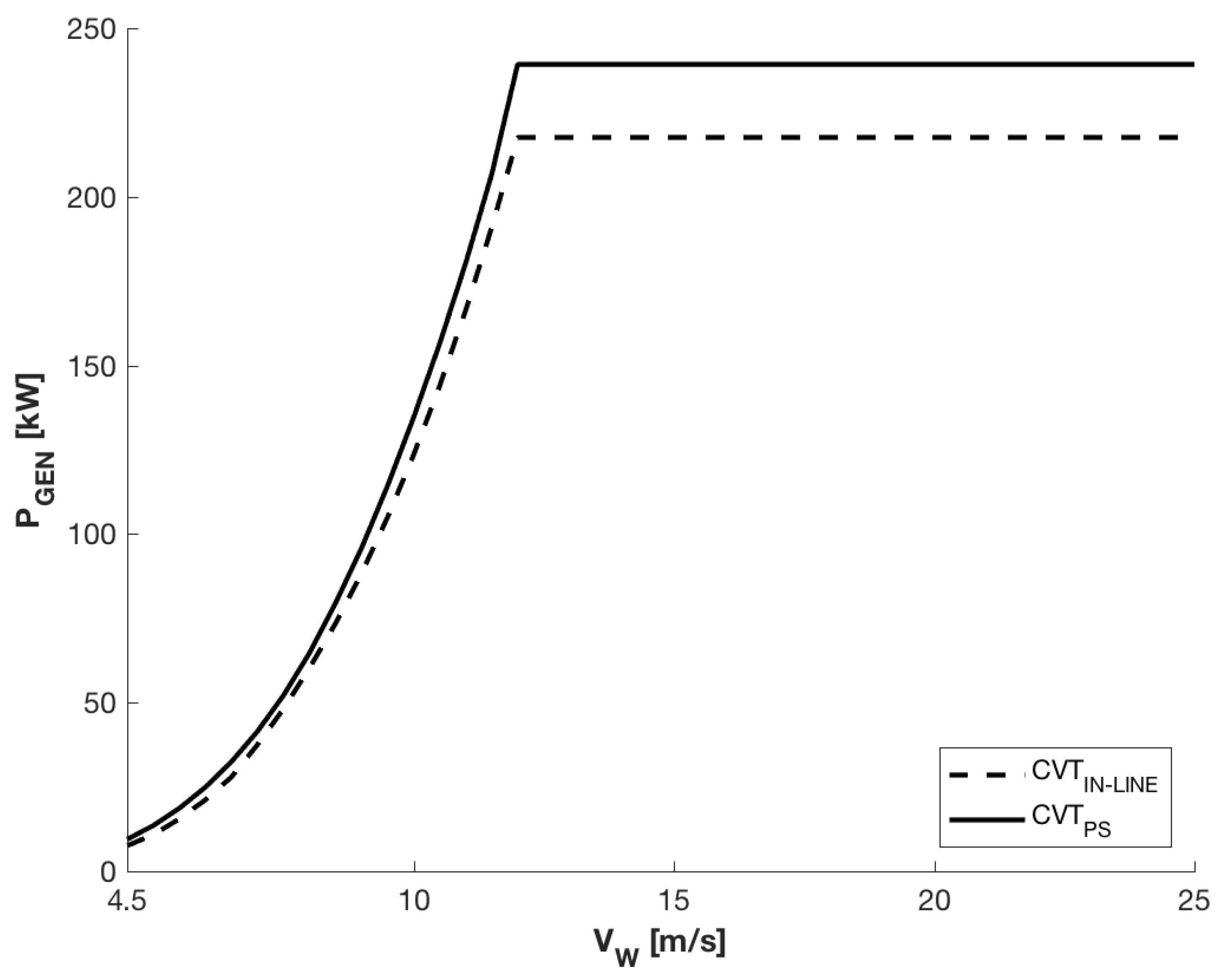
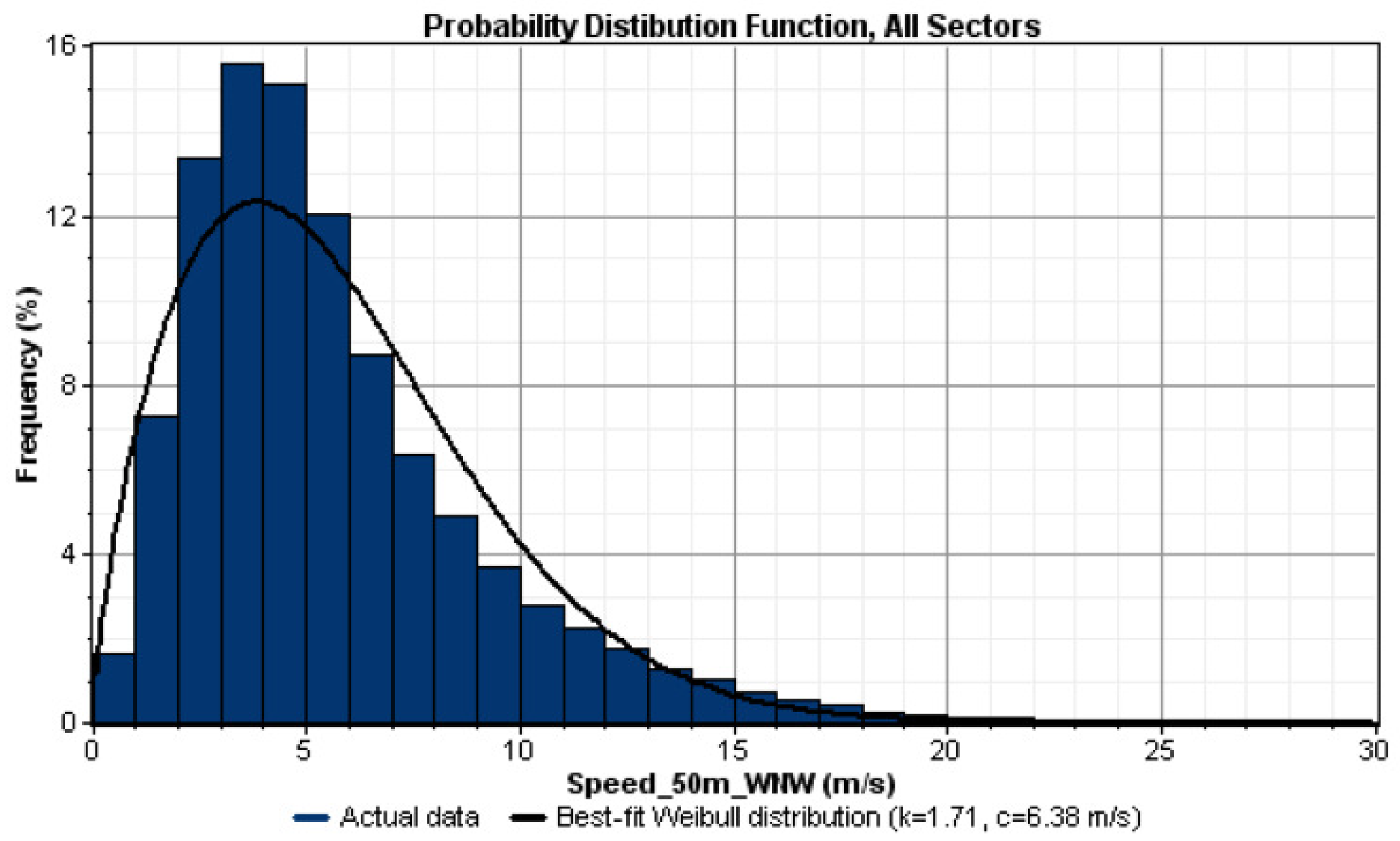
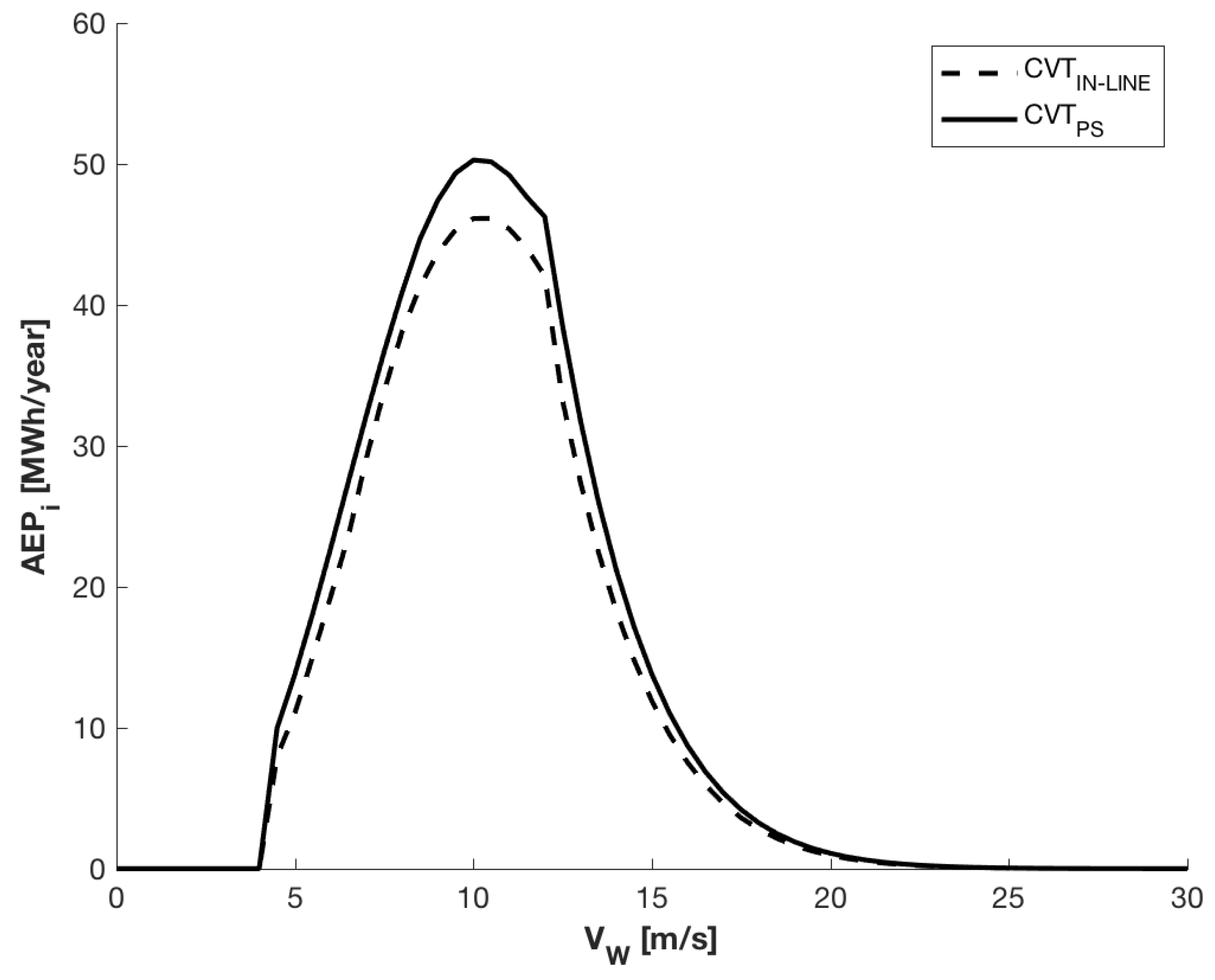
- The estimated increase of the annual energy production is about 10% with almost no additional costs (as determined by calculations performed on a typical site). This encourages us to continue with the development of prototypical wind turbine systems equipped with power split HTS.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| HTS | hydrostatic transmissions |
| PS | power-split |
| CVT | continuously variable transmission |
| IVT | infinitely variable transmission |
| PG | planetary gear train |
| OG | over-gear drive |
| GEN | electric generator |
| AEG | annual energy production |
References
- Lalor, G.; Mullane, A.; O’Malley, M. Frequency control and wind turbine technologies. IEEE Trans. Power Syst. 2005, 20, 1905–1913. [Google Scholar] [CrossRef]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- de Vries, E. Wind turbine drive systems: A commercial overview. Electr. Drives Direct Drive Renew. Energy Syst. 2013, 139–157. [Google Scholar] [CrossRef]
- Polinder, H.; Ferreira, J.A.; Jensen, B.B.; Abrahamsen, A.B.; Atallah, K.; McMahon, R.A. Trends in wind turbine generator systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 174–185. [Google Scholar] [CrossRef]
- Höhn, B.R. Future transmissions for wind turbines. In Applied Mechanics and Materials; Trans Tech Publications: Zurich, Switzerland, 2011; Volume 86, pp. 18–25. [Google Scholar]
- Mueller, M.; Zavvos, A. Electrical Generators for Direct Drive Systems: A Technology Overview; Woodhead: Oxford, UK, 2013. [Google Scholar]
- Santhanagopalan, V.; Rotea, M.; Iungo, G. Performance optimization of a wind turbine column for different incoming wind turbulence. Renew. Energy 2018, 116, 232–243. [Google Scholar] [CrossRef]
- Asl, H.J.; Yoon, J. Power capture optimization of variable-speed wind turbines using an output feedback controller. Renew. Energy 2016, 86, 517–525. [Google Scholar] [CrossRef]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electron. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Jamieson, P. Innovation in Wind Turbine Design; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Nejadkhaki, H.K.; Chaudhari, S.; Hall, J.F. A design methodology for selecting ratios for a variable ratio gearbox used in a wind turbine with active blades. Renew. Energy 2018, 118, 1041–1051. [Google Scholar] [CrossRef]
- Hall, J.F.; Mecklenborg, C.A.; Chen, D.; Pratap, S.B. Wind energy conversion with a variable-ratio gearbox: Design and analysis. Renew. Energy 2011, 36, 1075–1080. [Google Scholar] [CrossRef]
- Hall, J.F.; Chen, D. Performance of a 100 kW wind turbine with a Variable Ratio Gearbox. Renew. Energy 2012, 44, 261–266. [Google Scholar] [CrossRef]
- Giallanza, A.; Porretto, M.; Cannizzaro, L.; Marannano, G. Analysis of the maximization of wind turbine energy yield using a continuously variable transmission system. Renew. Energy 2017, 102, 481–486. [Google Scholar] [CrossRef]
- Mangialardi, L.; Mantriota, G. The advantages of using continuously variable transmissions in wind power systems. Renew. Energy 1992, 2, 201–209. [Google Scholar] [CrossRef]
- Mangialardi, L.; Mantriota, G. Automatically regulated CVT in wind power systems. Renew. Energy 1994, 4, 299–310. [Google Scholar] [CrossRef]
- Tyreas, G.C.; Nikolakopoulos, P.G. Development and friction estimation of the Half-Toroidal Continuously Variable Transmission: A wind generator application. Simul. Model. Pract. Theory 2016, 66, 63–80. [Google Scholar] [CrossRef]
- Bottiglione, F.; Mantriota, G. MG-IVT: An infinitely variable transmission with optimal power flows. J. Mech. Des. 2008, 130, 112603. [Google Scholar] [CrossRef]
- Bottiglione, F.; Mantriota, G. Reversibility of power-split transmissions. J. Mech. Des. 2011, 133, 084503. [Google Scholar] [CrossRef]
- Yang, F.; Feng, J.; Zhang, H. Power flow and efficiency analysis of multi-flow planetary gear trains. Mech. Mach. Theory 2015, 92, 86–99. [Google Scholar] [CrossRef]
- Mangialardi, L.; Mantriota, G. Power flows and efficiency in infinitely variable transmissions. Mech. Mach. Theory 1999, 34, 973–994. [Google Scholar] [CrossRef]
- Bottiglione, F.; De Pinto, S.; Mantriota, G. Infinitely Variable Transmissions in neutral gear: Torque ratio and power re-circulation. Mech. Mach. Theory 2014, 74, 285–298. [Google Scholar] [CrossRef]
- Mantriota, G. Performances of a parallel infinitely variable transmissions with a type II power flow. Mech. Mach. Theory 2002, 37, 555–578. [Google Scholar] [CrossRef]
- Mantriota, G. Performances of a series infinitely variable transmission with type I power flow. Mech. Mach. Theory 2002, 37, 579–597. [Google Scholar] [CrossRef]
- Jelaska, D.; Podrug, S.; Perkušić, M. Kinematic synthesis of a novel type of the series of transmissions with independently controllable output speed. Mech. Mach. Theory 2016, 103, 189–201. [Google Scholar] [CrossRef]
- Jelaska, D.; Podrug, S.; Perkušić, M. A novel hybrid transmission for variable speed wind turbines. Renew. Energy 2015, 83, 78–84. [Google Scholar] [CrossRef]
- Mantriota, G. Power split transmissions for wind energy systems. Mech. Mach. Theory 2017, 117, 160–174. [Google Scholar] [CrossRef]
- Liu, H.; Lin, Y.; Shi, M.; Li, W.; Gu, H.; Xu, Q.; Tu, L. A novel hydraulic-mechanical hybrid transmission in tidal current turbines. Renew. Energy 2015, 81, 31–42. [Google Scholar] [CrossRef]
- Yin, X.X.; Lin, Y.G.; Li, W.; Liu, H.W.; Gu, Y.J. Output power control for hydro-viscous transmission based continuously variable speed wind turbine. Renew. Energy 2014, 72, 395–405. [Google Scholar] [CrossRef]
- Pandiaraj, K.; Taylor, P.; Jenkins, N.; Robb, C. Distributed load control of autonomous renewable energy systems. IEEE Trans. Energy Convers. 2001, 16, 14–19. [Google Scholar] [CrossRef]
- Miao, Z.; Fan, L.; Osborn, D.; Yuvarajan, S. Wind farms with HVdc delivery in inertial response and primary frequency control. IEEE Trans. Energy Convers. 2010, 25, 1171–1178. [Google Scholar] [CrossRef]
- Shamshirband, S.; Petković, D.; Amini, A.; Anuar, N.B.; Nikolić, V.; Ćojbašić, Ž.; Kiah, M.L.M.; Gani, A. Support vector regression methodology for wind turbine reaction torque prediction with power-split hydrostatic continuous variable transmission. Energy 2014, 67, 623–630. [Google Scholar] [CrossRef]
- Johnson, K.E.; Pao, L.Y.; Balas, M.J.; Fingersh, L.J. Control of variable-speed wind turbines: standard and adaptive techniques for maximizing energy capture. IEEE Control Syst. 2006, 26, 70–81. [Google Scholar]
- Dasgupta, K. Analysis of a hydrostatic transmission system using low speed high torque motor. Mech. Mach. Theory 2000, 35, 1481–1499. [Google Scholar] [CrossRef]
- Rampen, W. Hydraulic Transmissions for Hybrid Vehicles; Artemis Intelligent Power LTD: Loanhead, Scotland, 2008. [Google Scholar]
- Rydberg, K.E. On Performance Optimization and Digital Control of Hydrostatic Drives for Vehicle Applications; Number Monograph; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 1983. [Google Scholar]
- Achten, P.; Van den Brink, T.; Paardenkooper, T.; Platzer, T.; Potma, H.; Schellekens, M.; Vael, G. Design and testing of an axial piston pump based on the floating cup principle. Proc. SICFP 2003, 3, 805–820. [Google Scholar]
- Rydberg, K.E. Hydraulic hybrids—The new generation of energy efficient drives. In Proceedings of the 7th International Conference on Fluid Power Transmission and Control ICFP, Hangzhou, China, 7–10 April 2009; pp. 7–10. [Google Scholar]
- Costa, G.; Sepehri, N. Hydrostatic Transmissions and Actuators: Operation, Modelling and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Parameter | Symbol | Value |
|---|---|---|---|
| Turbine | rotor diameter | D | 25 |
| optimal tip speed ratio | 8.5 | ||
| maximum value of power coefficient | 0.5 | ||
| electric generator speed | 1000 RPM | ||
| low threshold value of wind speed | 4.5 | ||
| rated wind speed | 12 | ||
| In-Line HTS | over-gear speed ratio | 10 | |
| over-gear efficiency | 0.94 | ||
| pump displacement | |||
| motor displacement | |||
| PS-HTS | over-gear speed ratio | 10 | |
| over-gear efficiency | 0.94 | ||
| hydraulic CVT ratio spread | ∞ | ||
| pump displacement | |||
| motor displacement | |||
| planetary gear speed ratio | |||
| planetary gear efficiency with stationary carrier |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bottiglione, F.; Mantriota, G.; Valle, M. Power-Split Hydrostatic Transmissions for Wind Energy Systems. Energies 2018, 11, 3369. https://doi.org/10.3390/en11123369
Bottiglione F, Mantriota G, Valle M. Power-Split Hydrostatic Transmissions for Wind Energy Systems. Energies. 2018; 11(12):3369. https://doi.org/10.3390/en11123369
Chicago/Turabian StyleBottiglione, Francesco, Giacomo Mantriota, and Marco Valle. 2018. "Power-Split Hydrostatic Transmissions for Wind Energy Systems" Energies 11, no. 12: 3369. https://doi.org/10.3390/en11123369
APA StyleBottiglione, F., Mantriota, G., & Valle, M. (2018). Power-Split Hydrostatic Transmissions for Wind Energy Systems. Energies, 11(12), 3369. https://doi.org/10.3390/en11123369