Stochastic Dynamic Response Analysis of a 10 MW Tension Leg Platform Floating Horizontal Axis Wind Turbine

Abstract
1. Introduction
2. Theories and Methods
2.1. Aerodynamic Modeling
2.2. Hydrodynamic Modeling
2.3. Environmental Conditions
3. Modeling and Calibration
3.1. Modeling
3.2. Validation
4. Simulation Research
4.1. Comparison of TLP FHAWT and Onshore HAWT
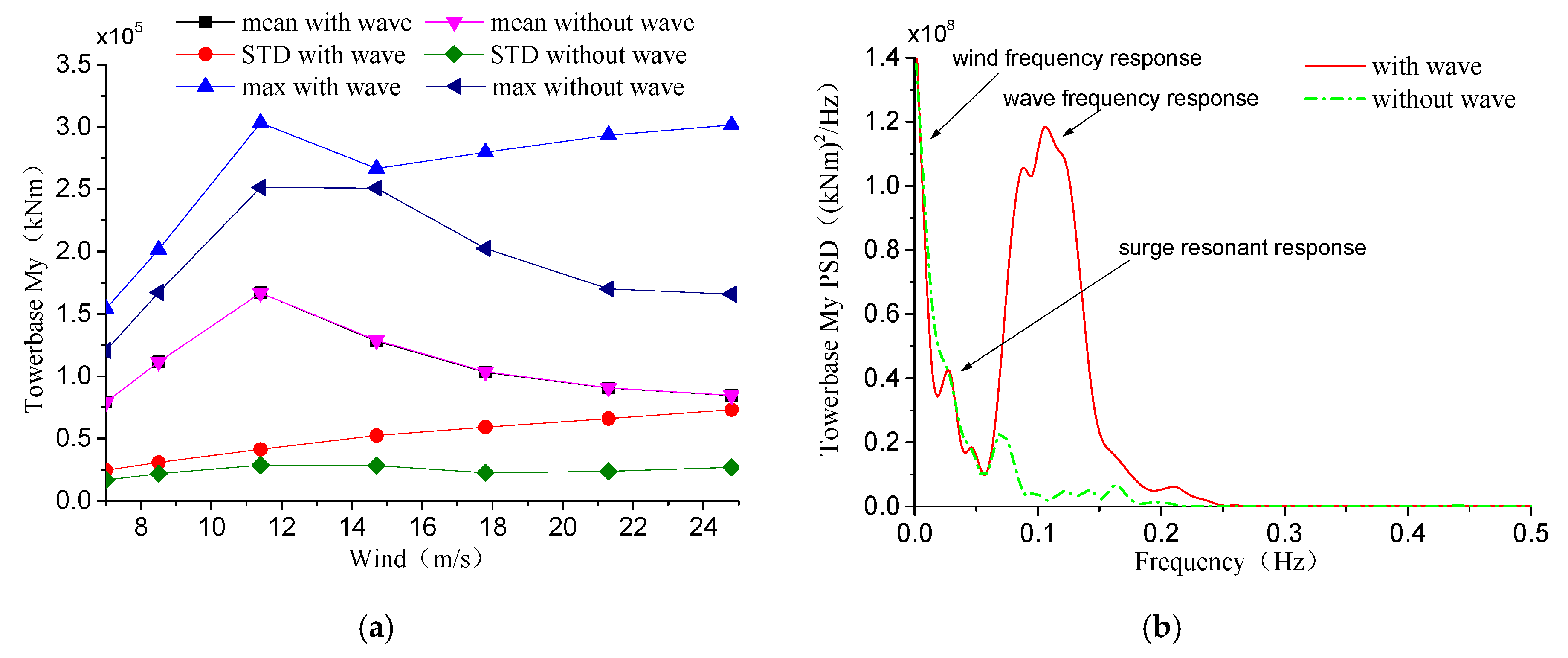
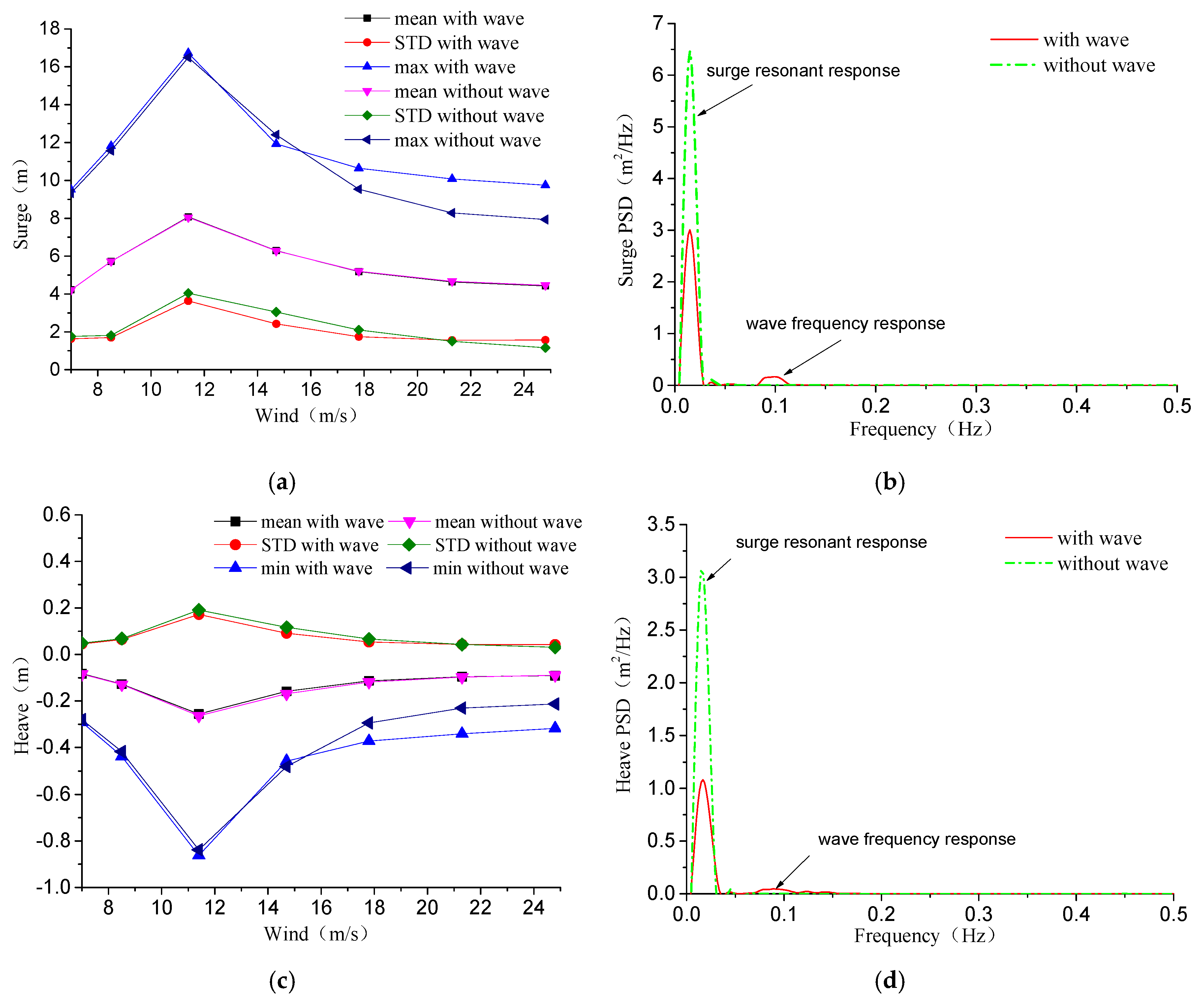
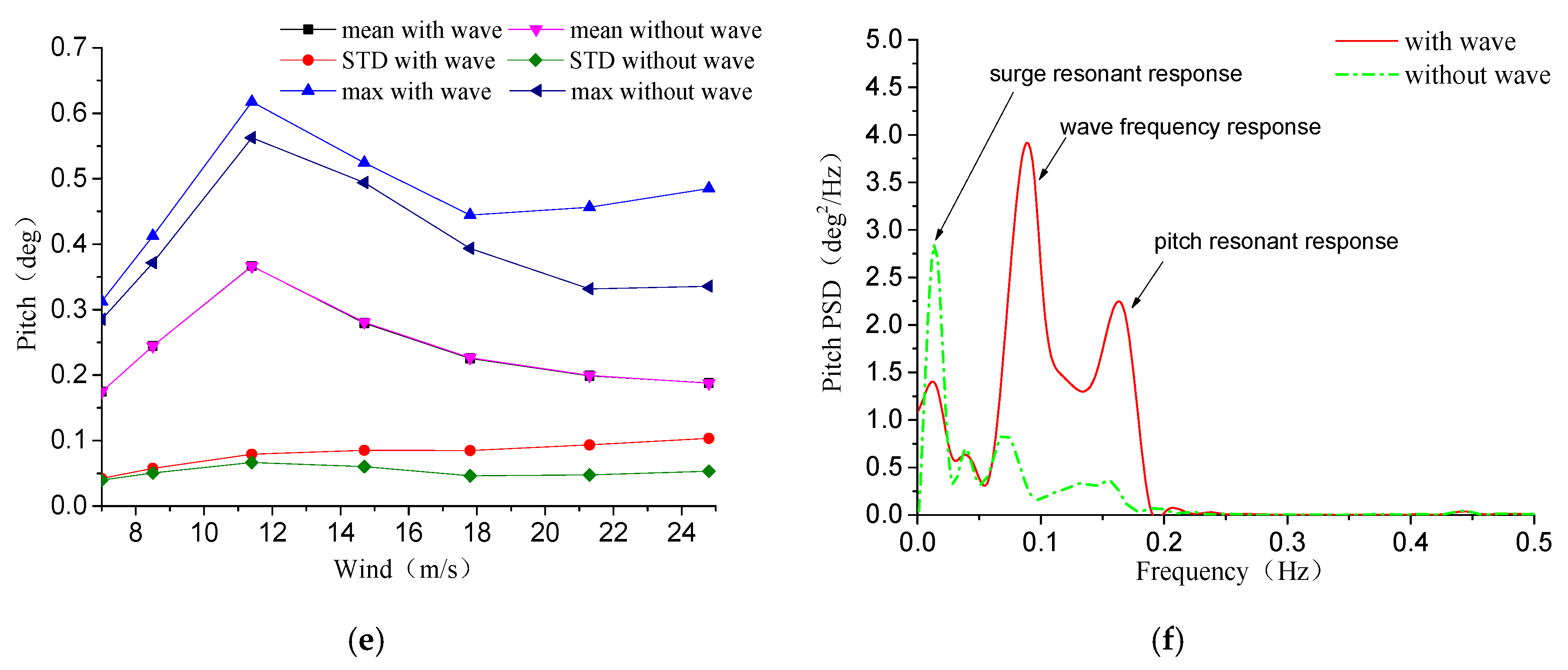
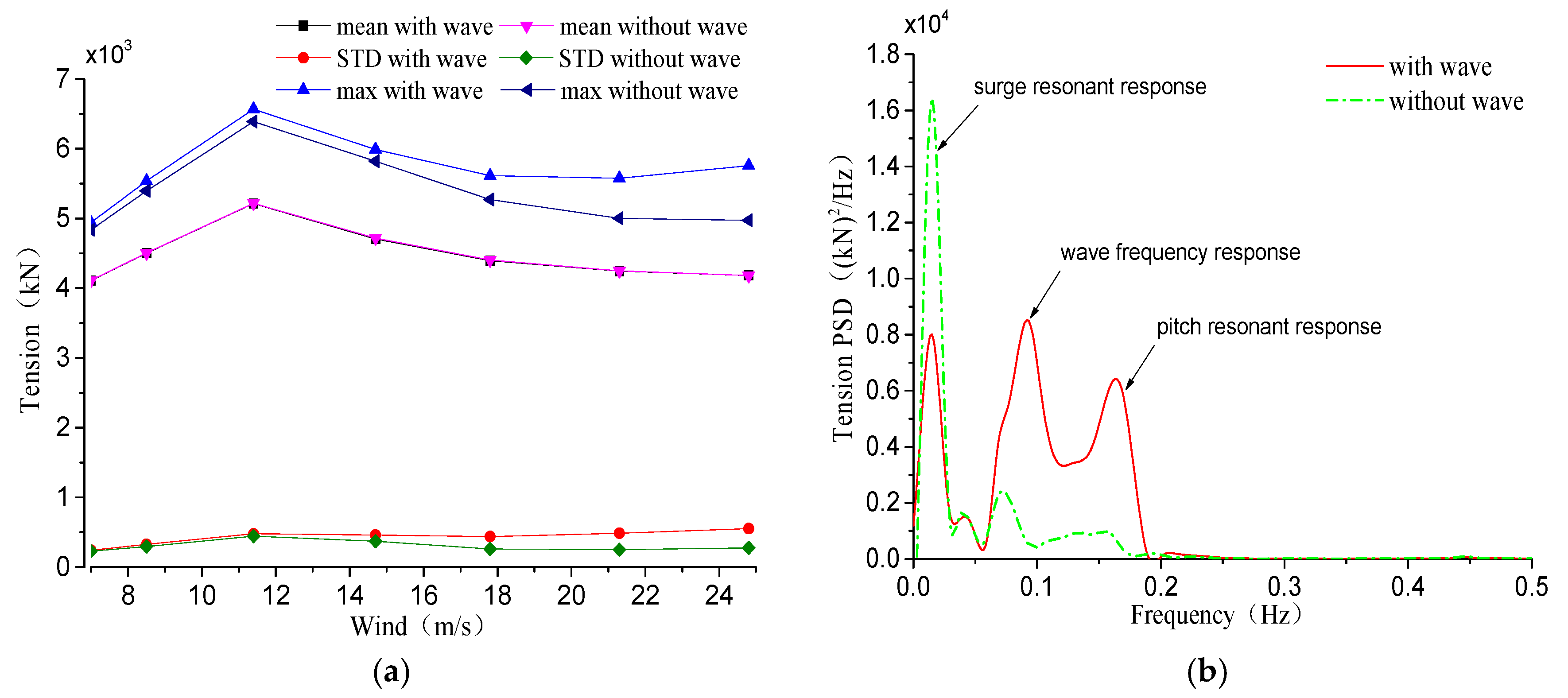
4.2. Influence of Wave on TLP FHAWT
4.2.1. The Influence of the Wave
4.2.2. The Influence of the Wind-Wave Misalignment
5. Conclusions
- (1)
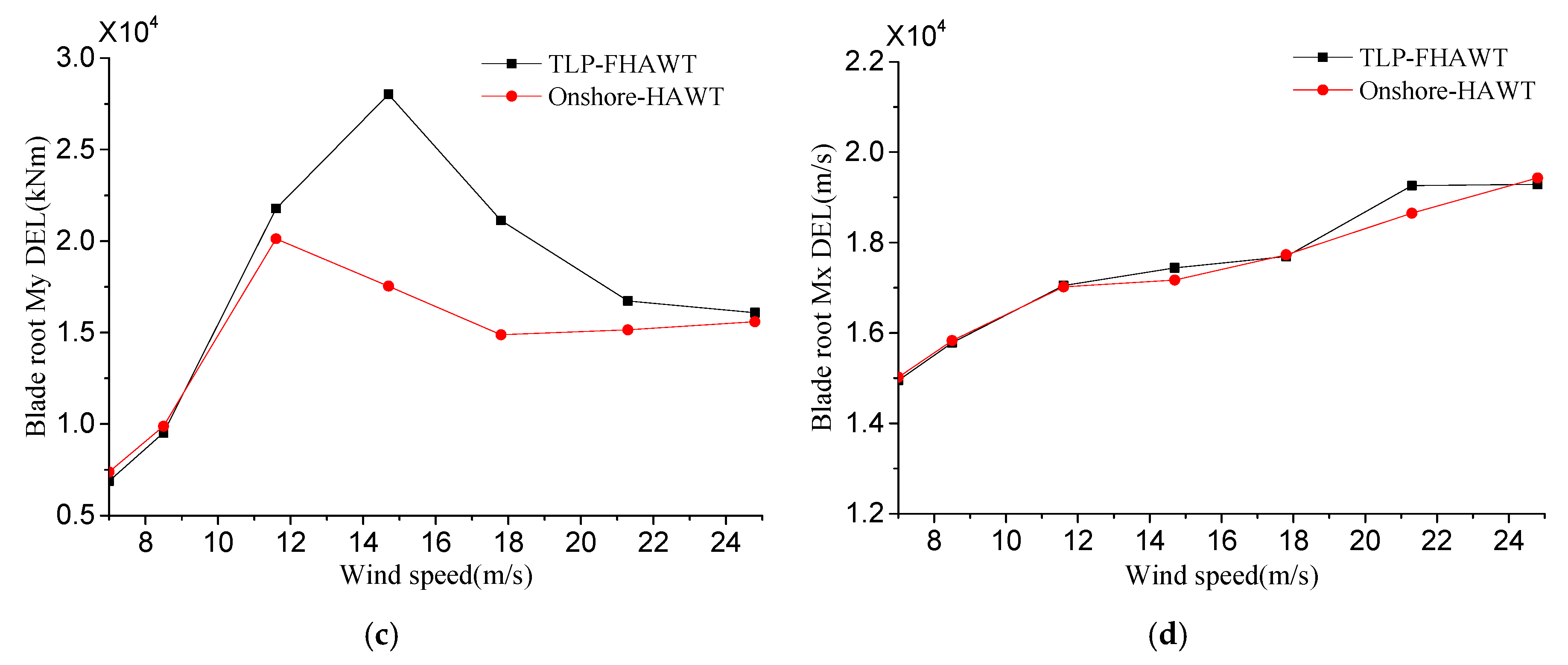
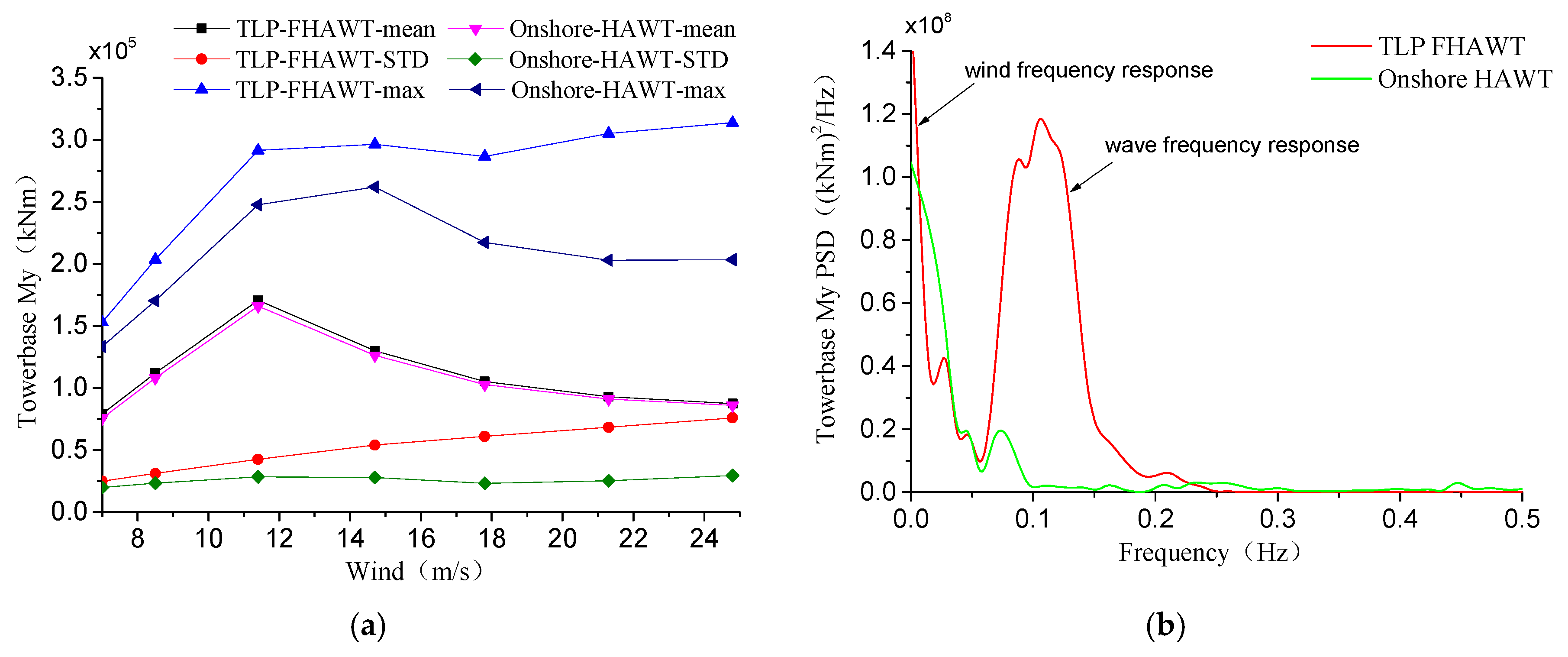
- Both mean values of blade root bending moments of the TLP FHAWT and of the equivalent onshore HAWT were almost the same. Loads on the blade root were mainly caused by turbulent wind, but short-term damage equivalent loads on the blade were dramatically affected by the wave. Due to inclination of the tower, mean value of tower bending moment of the TLP FHAWT was greater than it of the equivalent onshore HAWT. At the rated wind speed, My value of the TLP FHAWT exceeded it of the equivalent Onshore HAWT My value by 4702.37 kNm.
- (2)
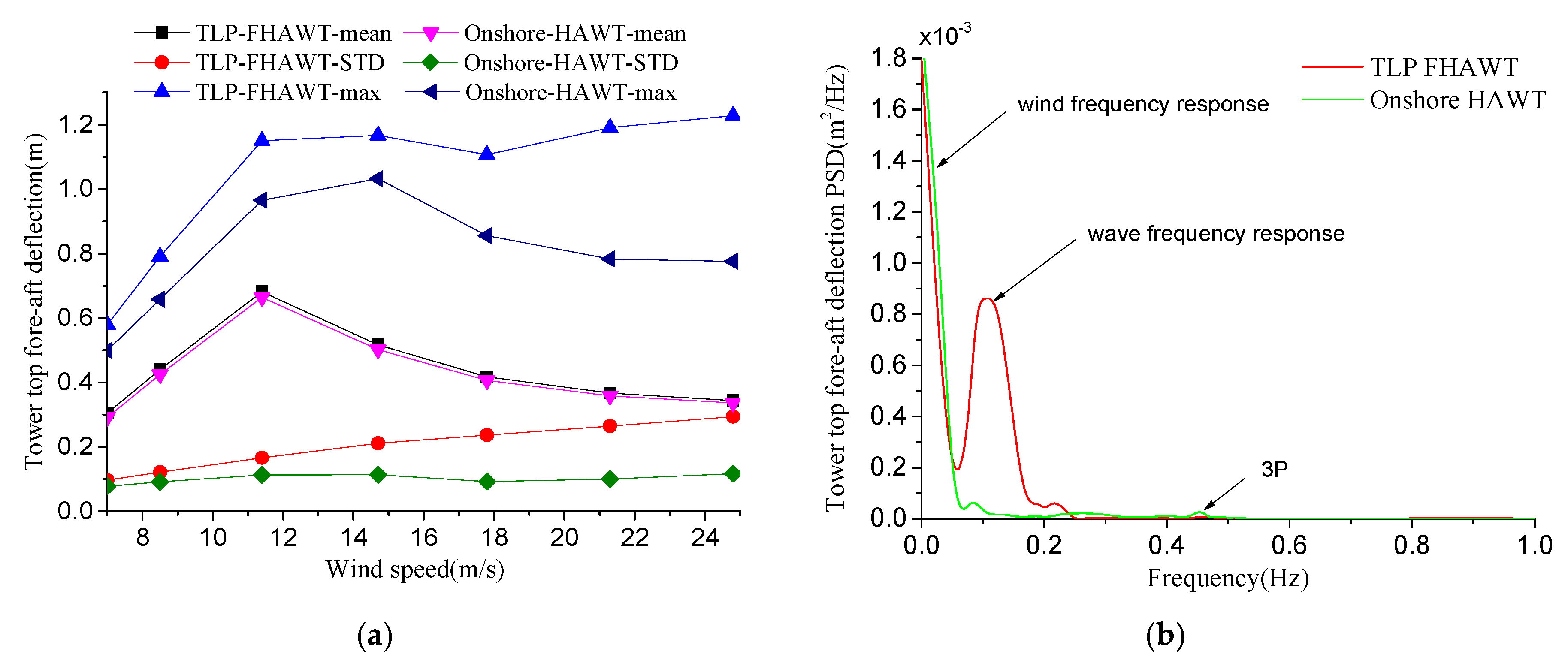
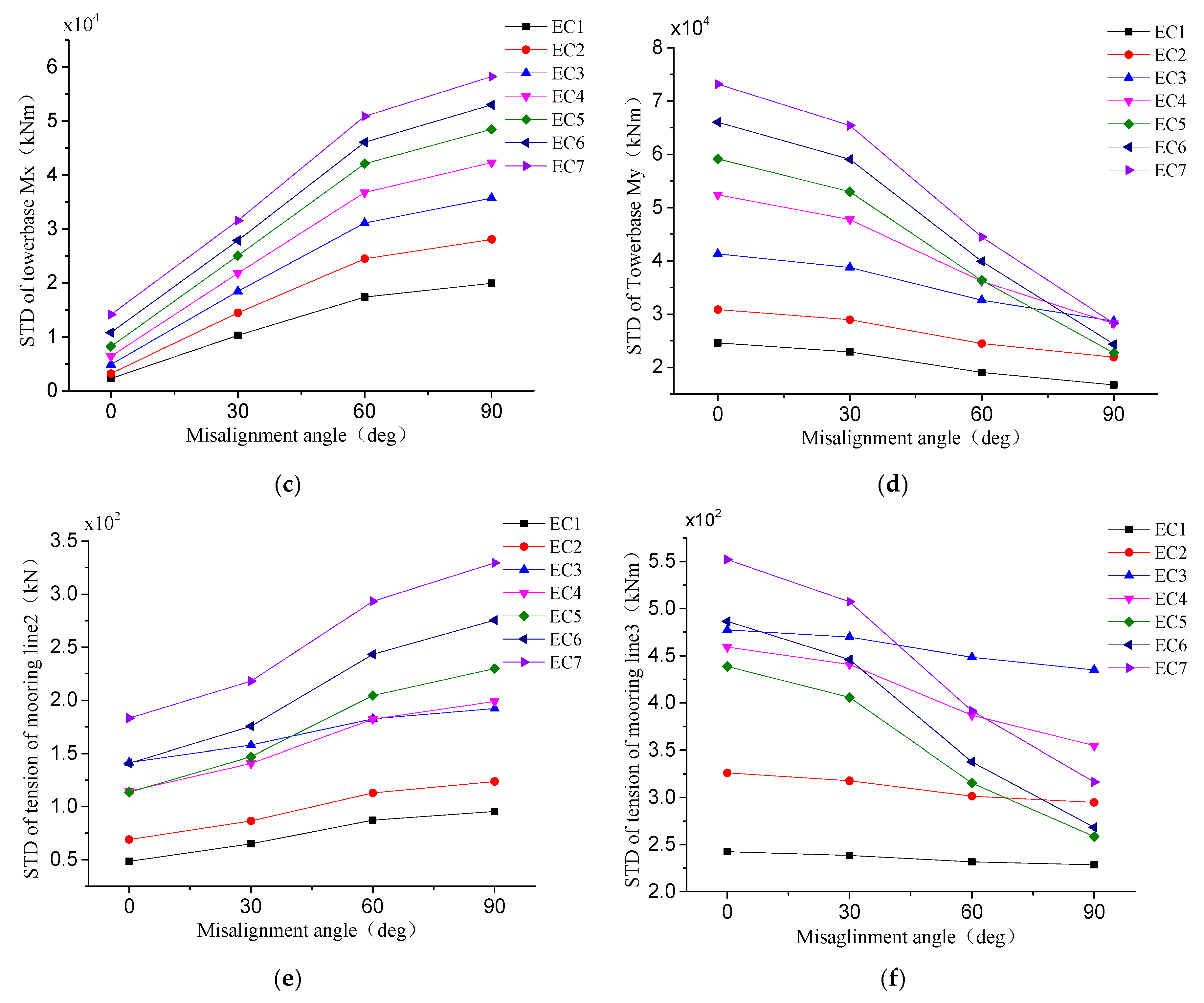
- Vibration of the TLP FHAWT tower was substantially affected by the wind-wave misalignment. The aerodynamic damping generated by rotation of the rotor could significantly reduce vibration of the tower caused by wave loads. As βwave increased, inclination of the platform caused the center of gravity of the nacelle to shift which further increased bending moments of the tower base. Therefore, reinforcement design for the TLP FHAWT tower should supposed to be enhanced.
- (3)
- Ultimate tension of the mooring system was mainly related to the displacement caused by pitch motion. Standard deviation of the tension was significantly affected by the wave frequency response. Therefore, ultimate tension of the mooring line should be decreased by reducing the pitch motion.
- (4)
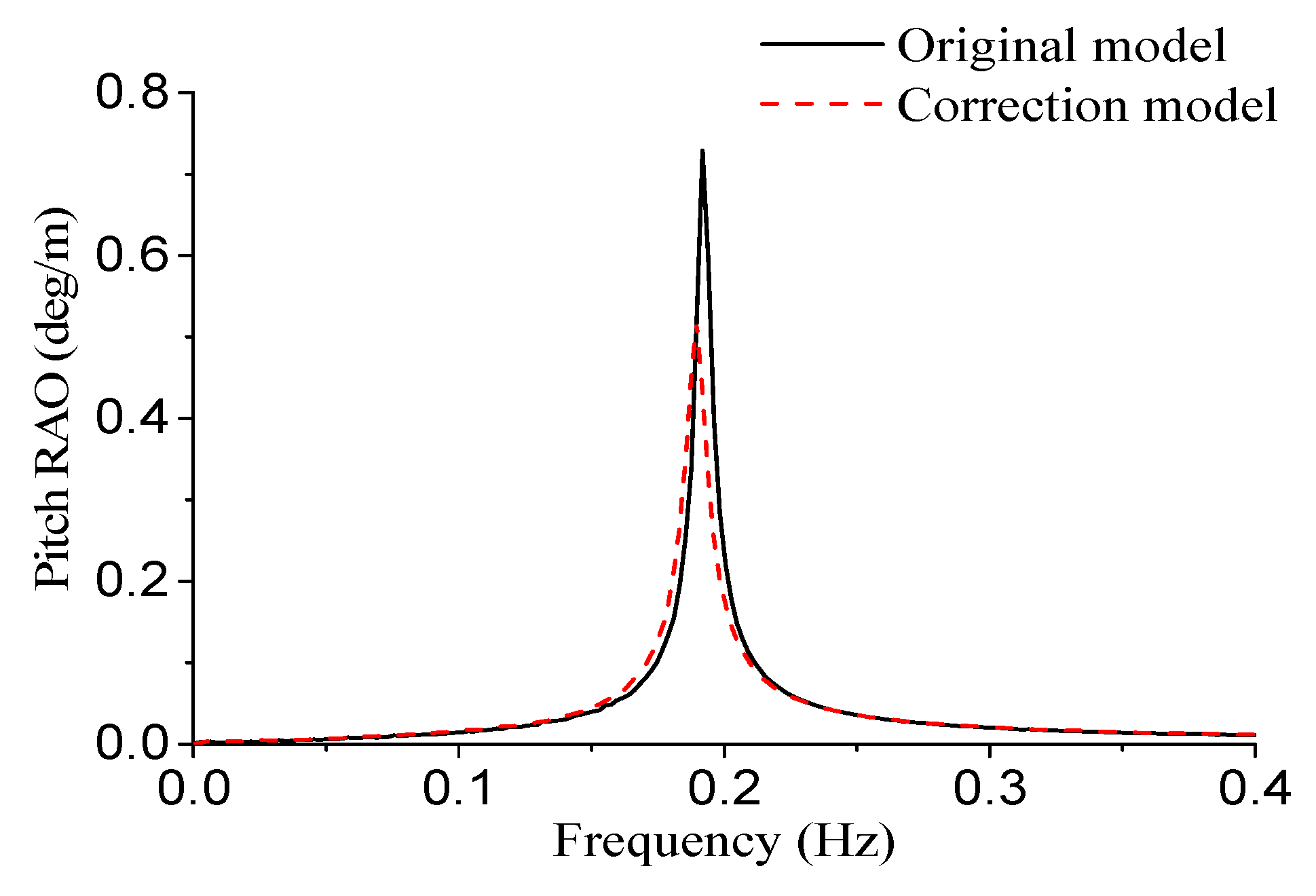
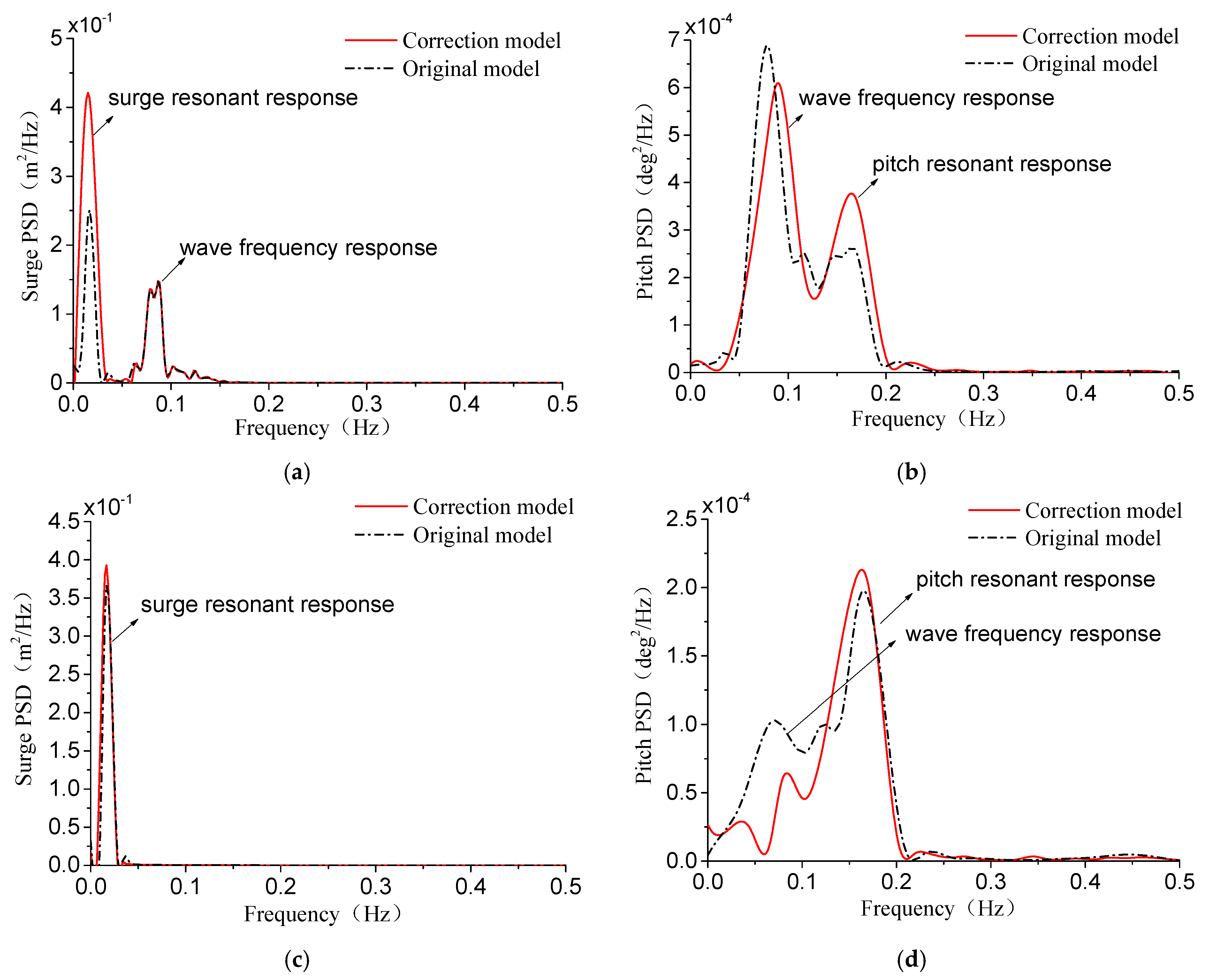
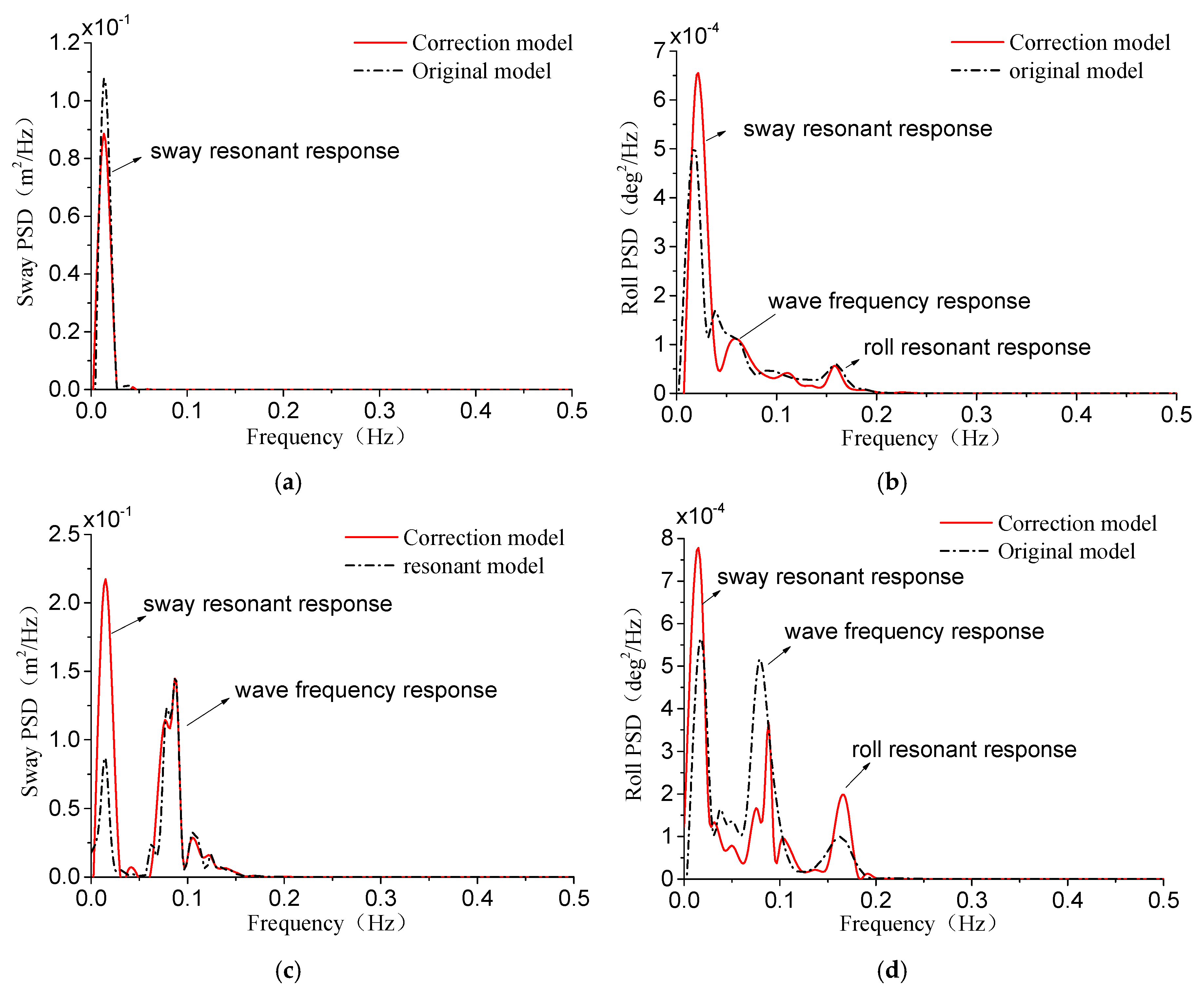
- Amplitudes of the pitch and roll motion were overestimated in the free decay motion due to the neglected of viscous drag of the mooring system. Viscous drag would increase the resonance of the platform under the wave loads, while the quasi-static mooring system correction model could capture those resonances better. Wave loads mainly affected the pitch and surge motion when βwave is 0°. The inertial force caused by the surge motion would generate high-frequency moments which would cause pitch resonance. When the wind-wave misalignment, the inertial force caused by the sway motion would generate high-frequency moments without the inhibition of aerodynamic damping, which would cause roll resonance.
Author Contributions
Funding
Conflicts of Interest
References
- Danao, L.A.; Edwards, J.; Eboibi, O.; Howell, R. A numerical investigation into the influence of unsteady wind on the performance and aerodynamics of a vertical axis wind turbine. Appl. Energy 2014, 116, 111–124. [Google Scholar] [CrossRef]
- Sun, H.; Luo, X.; Wang, J. Feasibility study of a hybrid wind turbine system—Integration with compressed air energy storage. Appl. Energy 2015, 137, 617–628. [Google Scholar] [CrossRef]
- Liu, X.; Lu, C.; Li, G.; Godbole, A.; Chen, Y. Effects of aerodynamic damping on the tower load of offshore horizontal axis wind turbines. Appl. Energy 2017, 204, 1101–1114. [Google Scholar] [CrossRef]
- Esteban, M.; Leary, D. Current developments and future prospects of offshore wind and ocean energy. Appl. Energy 2012, 90, 128–136. [Google Scholar] [CrossRef]
- Shu, Z.R.; Li, Q.S.; Chan, P.W. Investigation of offshore wind energy potential in Hong Kong based on Weibull distribution function. Appl. Energy 2015, 156, 362–373. [Google Scholar] [CrossRef]
- Han, Y.; Le, C.; Ding, H.; Cheng, Z.; Zhang, P. Stability and dynamic response analysis of a submerged tension leg platform for offshore wind turbines. Ocean Eng. 2017, 129, 68–82. [Google Scholar] [CrossRef]
- Ding, H.; Liu, Y.; Zhang, P.; Le, C. Model tests on the bearing capacity of wide-shallow composite bucket foundations for offshore wind turbines in clay. Ocean Eng. 2015, 103, 114–122. [Google Scholar] [CrossRef]
- Wayman, E.N.; Sclavounos, P.D.; Butterfield, S.; Jonkman, J.; Musial, W. Coupled dynamic modeling of floating wind turbine systems. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2006. [Google Scholar] [CrossRef]
- Karimirad, M.; Moan, T. Wave-and wind-induced dynamic response of a spar-type offshore wind turbine. J. Waterw. Port Coast. Ocean Eng. 2011, 138, 9–20. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Matha, D. Dynamics of offshore floating wind turbines—Analysis of three concepts. Wind Energy 2011, 14, 557–569. [Google Scholar] [CrossRef]
- Bachynski, E.E.; Moan, T. Design considerations for tension leg platform wind turbines. Mar. Struct. 2012, 29, 89–114. [Google Scholar] [CrossRef]
- Luan, C.; Gao, Z.; Moan, T. Modelling and analysis of a semi-submersible wind turbine with a central tower with emphasis on the brace system. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic, Nantes, France, 9–14 June 2013. [Google Scholar] [CrossRef]
- Bachynski, E.E.; Kvittem, M.I.; Luan, C.; Moan, T. Wind-wave misalignment effects on floating wind turbines: Motions and tower load effects. J. Offshore Mech. Arctic Eng. 2014, 136, 041902. [Google Scholar] [CrossRef]
- Matha, D. Model development and loads analysis of an offshore wind turbine on a tension leg platform with a comparison to other floating turbine concepts. In Proceedings of the European Offshore Wind 2009, Stockholm, Sweden, 14–16 September 2009. [Google Scholar] [CrossRef]
- Li, Y.; Tang, Y.; Zhu, Q.; Qu, X.; Wang, B.; Zhang, R. Effects of second-order wave forces and aerodynamic forces on dynamic responses of a TLP-type floating offshore wind turbine considering the set-down motion. J. Renew. Sustain. Energy 2017, 9, 063302. [Google Scholar] [CrossRef]
- Vita, L.; Ramachandran, G.K.V.; Krieger, A.; Kvittem, M.I.; Merino, D.; Cross-Whiter, J.; Ackers, B.B. Comparison of numerical models and verification against experimental data, using Pelastar TLP concept. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar] [CrossRef]
- Sant, T.; Bonnici, D.; Farrugia, R.; Micallef, D. Measurements and modelling of the power performance of a model floating wind turbine under controlled conditions. Wind Energy 2015, 18, 811–834. [Google Scholar] [CrossRef]
- Nihei, Y.; Iijima, K.; Murai, M.; Ikoma, T. A comparative study of motion performance of four different FOWT designs in combined wind and wave loads. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef]
- Liu, X.; Lu, C.; Liang, S.; Godbole, A.; Chen, Y. Vibration-induced aerodynamic loads on large horizontal axis wind turbine blades. Appl. Energy 2017, 185, 1109–1119. [Google Scholar] [CrossRef]
- Shen, M.; Hu, Z.; Liu, G. Dynamic response and viscous effect analysis of a TLP-type floating wind turbine using a coupled aero-hydro-mooring dynamic code. Renew. Energy 2016, 99, 800–812. [Google Scholar] [CrossRef]
- Farrugia, R.; Sant, T.; Micallef, D. A study on the aerodynamics of a floating wind turbine rotor. Renew. Energy 2016, 86, 770–784. [Google Scholar] [CrossRef]
- Salehyar, S.; Zhu, Q. Aerodynamic dissipation effects on the rotating blades of floating wind turbines. Renew. Energy 2015, 78, 119–127. [Google Scholar] [CrossRef]
- Stewart, G.M.; Lackner, M.A.; Robertson, A.; Jonkman, J.; Goupee, A.J. Calibration and validation of a FAST floating wind turbine model of the Deep C wind scaled tension-leg platform. In Proceedings of the 22nd International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2015; pp. 1–8. [Google Scholar]
- Stewart, G.M.; Robertson, A.; Jonkman, J.; Lackner, M.A. The creation of a comprehensive metocean data set for offshore wind turbine simulations. Wind Energy 2016, 19, 1151–1159. [Google Scholar] [CrossRef]
- Barth, S.; Eecen, P.J. Description of The Relation of Wind, Wave and Current Characteristics at The Offshore Wind Farm Egmond Aan Zee (Owez) Location in 2006; ECN: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Barj, L.; Jonkman, J.M.; Robertson, A.; Stewart, G.M.; Lackner, M.A.; Haid, L.; Stewart, S.W. Wind/wave misalignment in the loads analysis of a floating offshore wind turbine. In Proceedings of the 32nd ASME Wind Energy Symposium, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar] [CrossRef]
- Trumars, J.M.; Jonsson, J.O.; Bergdahl, L. The effect of wind and wave misalignment on the response of a wind turbine at Bockstigen. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; pp. 635–641. [Google Scholar]
- Moriarty, P.J.; Hansen, A.C. AeroDyn Theory Manual; National Renewable Energy Laboratory: Golden, CO, USA, 2005. [Google Scholar]
- Leishman, J.G.; Beddoes, T.S. A Semi-Empirical model for dynamic stall. J. Am. Helicopter Soc. 1989, 34, 3–17. [Google Scholar] [CrossRef]
- Gharali, K.; Johnson, D.A. Numerical modeling of an S809 airfoil under dynamic stall, erosion and high reduced frequencies. Appl. Energy 2012, 93, 45–52. [Google Scholar] [CrossRef]
- Gharali, K.; Johnson, D.A. Dynamic stall simulation of a pitching airfoil under unsteady freestream velocity. J. Fluid. Struct. 2013, 42, 228–244. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Hayman, G.J.; Jonkman, B.J.; Damiani, R.R.; Murray, R.E. AeroDyn V15 User’s Guide and Theory Manual; NREL: Golden, CO, USA, 2015. [Google Scholar]
- Wang, K.; Moan, T.; Hansen, M.O. Stochastic dynamic response analysis of a floating vertical-axis wind turbine with a semi-submersible floater. Wind Energy 2016, 19, 1853–1870. [Google Scholar] [CrossRef]
- Veritas, D.N. Sesam User Manual: Wadam; SEP: Boulder, CO, USA, 2010. [Google Scholar]
- Jonkman, J.M. Dynamics of offshore floating wind turbines—Model development and verification. Wind Energy 2009, 12, 459–492. [Google Scholar] [CrossRef]
- Hoff, J.R. Estimation of linear and quadratic roll damping from free-decay tests. Available online: http://www.ivt.ntnu.no/imt/courses/tmr7/resources/decay.pdf (accessed on 6 July 2001).
- International Electrotechnical Commission (IEC). Wind Turbines-Part 3: Design Requirements for Offshore Wind Turbines; International Electrotechnical Commission (IEC): London, UK, 2009. [Google Scholar]
- Johannessen, K.; Meling, T.S.; Hayer, S. Joint distribution for wind and waves in the northern north sea. In Proceedings of the Eleventh International Offshore and Polar Engineering Conference, Stavanger, Norway, 17–22 June 2001. [Google Scholar]
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Natarajan, A. The DTU 10-MW Reference Wind Turbine; DTU: Lyngby, Denmark, 2013. [Google Scholar]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST User’s Guide-Updated 05; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2005. [Google Scholar]
- Bredmose, H.; Mikkelsen, R.; Hansen, A.M.; Laugesen, R.; Heilskov, N.; Jensen, B.; Kirkegaard, J. Experimental study of the DTU 10 MW wind turbine on a TLP floater in waves and wind. In Proceedings of the EWEA Offshore Conference, Copenhagen, Denmark, 10–12 March 2015. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H. Rotor-floater-tether coupled dynamics including second-order sum–frequency wave loads for a mono-column-TLP-type FOWT (floating offshore wind turbine). Ocean Eng. 2013, 61, 109–122. [Google Scholar] [CrossRef]
- Matha, D.; Fischer, T.; Kuhn, M.; Jonkman, J. Model Development and Loads Analysis of a Wind Turbine on a Floating Offshore Tension Leg Platform; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2010. [Google Scholar]
- Bachynski, E.E.; Moan, T. Second order wave force effects on tension leg platform wind turbines in misaligned wind and waves. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. V09AT09A006. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Turbine power | 10 MW |
| Rotor orientation configuration | Upwind, 3 blades |
| Control | Variable speed, collective pitch |
| Drivetrain | Medium speed, multiple stage gearbox |
| Rotor, Hub diameter | 178.3 m, 5.6 m |
| Hub height | 119 m |
| Cut-in, Rated, Cut-out wind speed | 4 m/s, 11.4 m/s, 25 m/s |
| Cut-in, Rated rotor speed | 6 rpm, 9.6 rpm |
| Rotor mass | 229,000 kg |
| Nacelle mass | 446,000 kg |
| Tower mass | 605,000 kg |
| Description | Value |
|---|---|
| Platform Diameter | 19.8 m |
| Platform Draft | 47.89 m |
| Water Depth | 200 m |
| Mooring System Angle | 90° |
| Total Displacement | 14,745.69 m3 |
| Platform mass | 8,013,000 kg |
| Center of mass | −40.612 m |
| Center of buoyancy | –23.945 m |
| Number of mooring lines | 8 |
| Mooring lines length | 152.11 m |
| Viscous-drag coefficients | 0.6 |
| Condition | US (m/s) | Tp (s) | Hs (m) | Wind Turbine Status |
|---|---|---|---|---|
| EC1 | 7 | 9.56 | 2.34 | Operating |
| EC2 | 8.5 | 9.71 | 3.3 | |
| EC3 | 11.4 | 10.04 | 4.14 | |
| EC4 | 14.7 | 10.29 | 5.16 | |
| EC5 | 17.8 | 10.51 | 6.18 | |
| EC6 | 21.3 | 11.12 | 6.99 | |
| EC7 | 25 | 11.68 | 7.8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, T.; Tian, D.; Wang, R.; Liao, C. Stochastic Dynamic Response Analysis of a 10 MW Tension Leg Platform Floating Horizontal Axis Wind Turbine. Energies 2018, 11, 3341. https://doi.org/10.3390/en11123341
Luo T, Tian D, Wang R, Liao C. Stochastic Dynamic Response Analysis of a 10 MW Tension Leg Platform Floating Horizontal Axis Wind Turbine. Energies. 2018; 11(12):3341. https://doi.org/10.3390/en11123341
Chicago/Turabian StyleLuo, Tao, De Tian, Ruoyu Wang, and Caicai Liao. 2018. "Stochastic Dynamic Response Analysis of a 10 MW Tension Leg Platform Floating Horizontal Axis Wind Turbine" Energies 11, no. 12: 3341. https://doi.org/10.3390/en11123341
APA StyleLuo, T., Tian, D., Wang, R., & Liao, C. (2018). Stochastic Dynamic Response Analysis of a 10 MW Tension Leg Platform Floating Horizontal Axis Wind Turbine. Energies, 11(12), 3341. https://doi.org/10.3390/en11123341