Unbalanced Current Sharing Control in Islanded Low Voltage Microgrids


Abstract
1. Introduction
- increased losses in the system and temperatures in induction motors and transformers,
- vibration in induction motors which causes mechanical stress and reduces their lifetime,
- reduction in power factor which increases KVA demand and line losses.
2. Methods
2.1. Multi-Bus Low Voltage Microgrid Structure
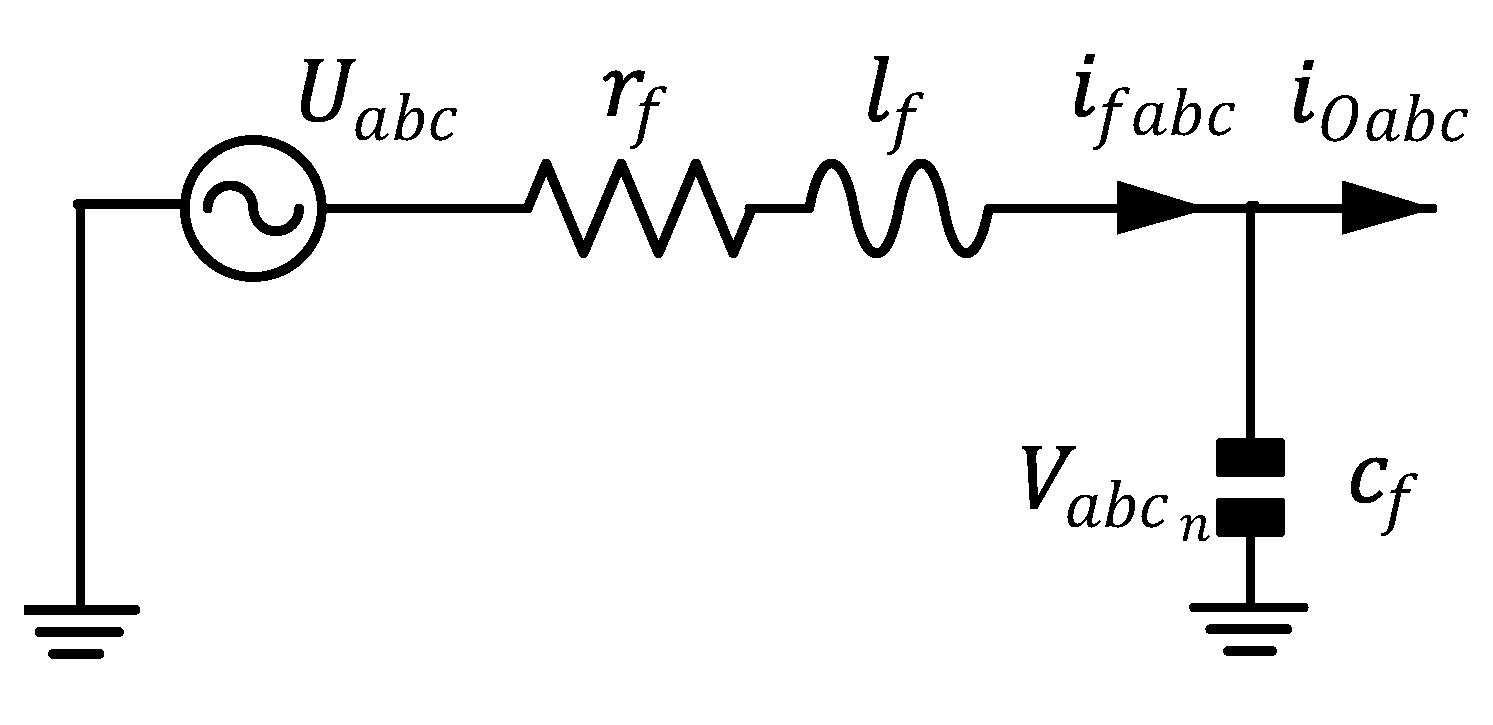
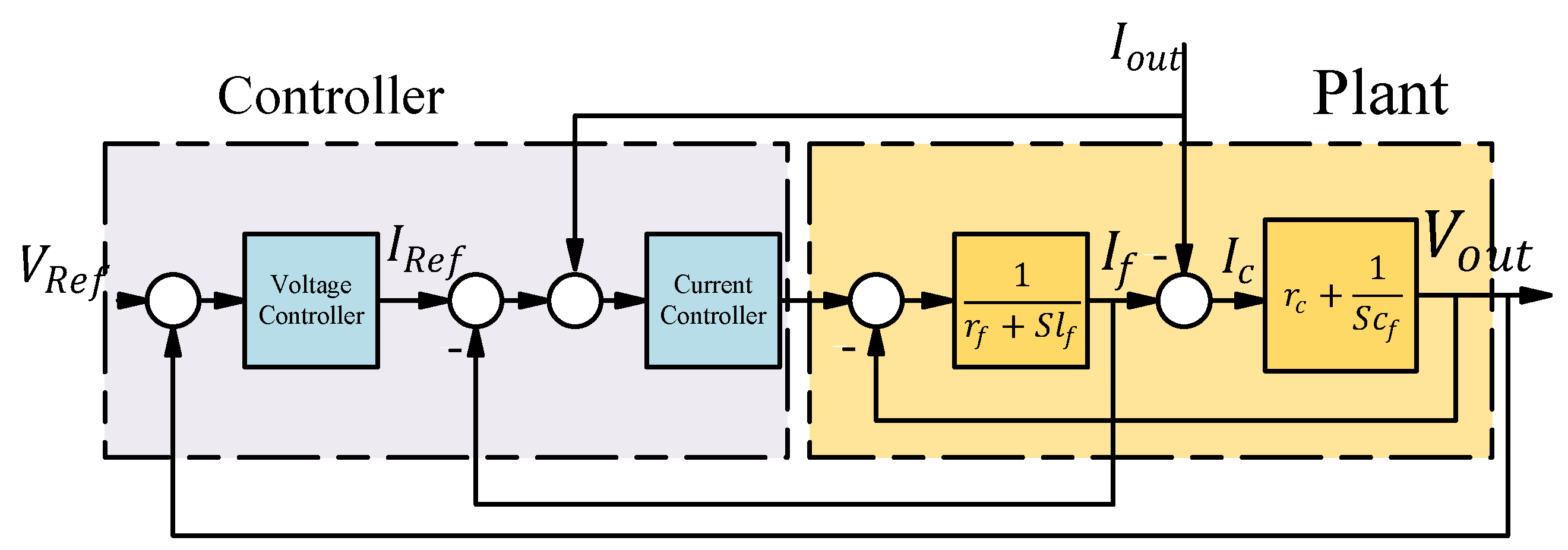
2.2. Controller Structure
2.3. Operation Principles of the Proposed Control Strategy
2.4. Proportional Resonance Controller
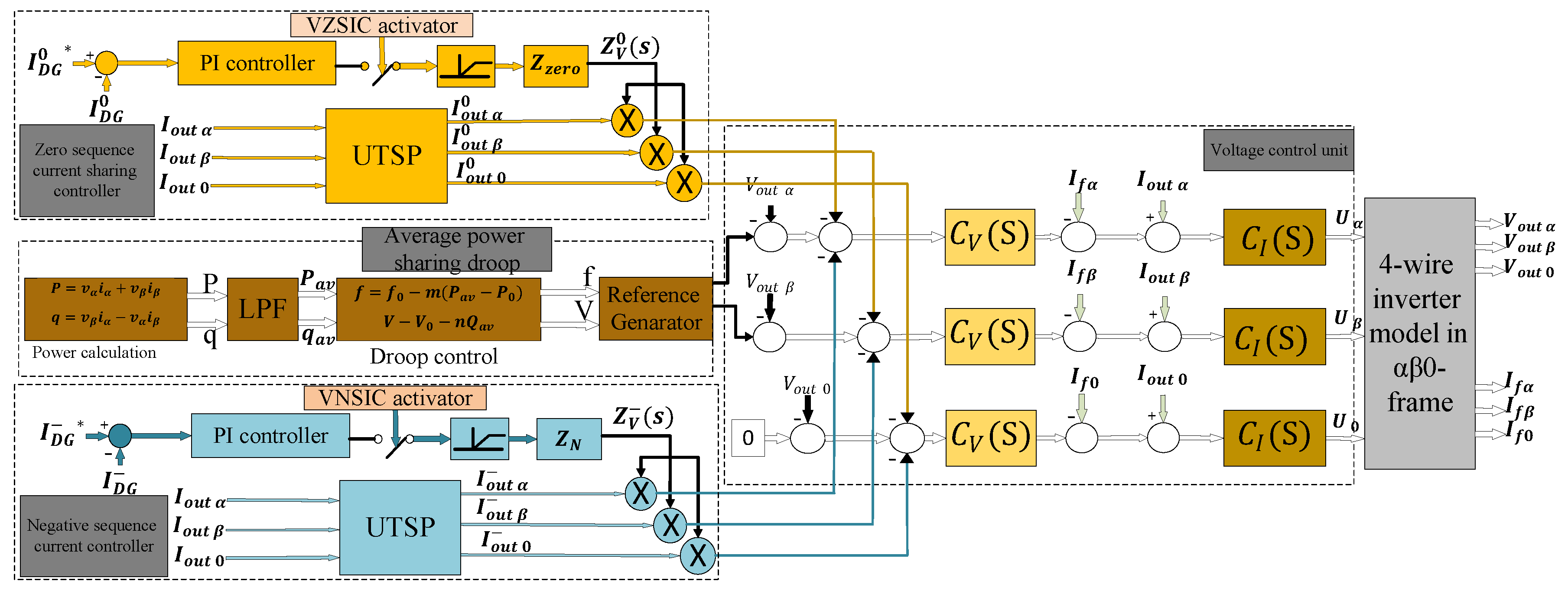
2.5. Proposed Control System
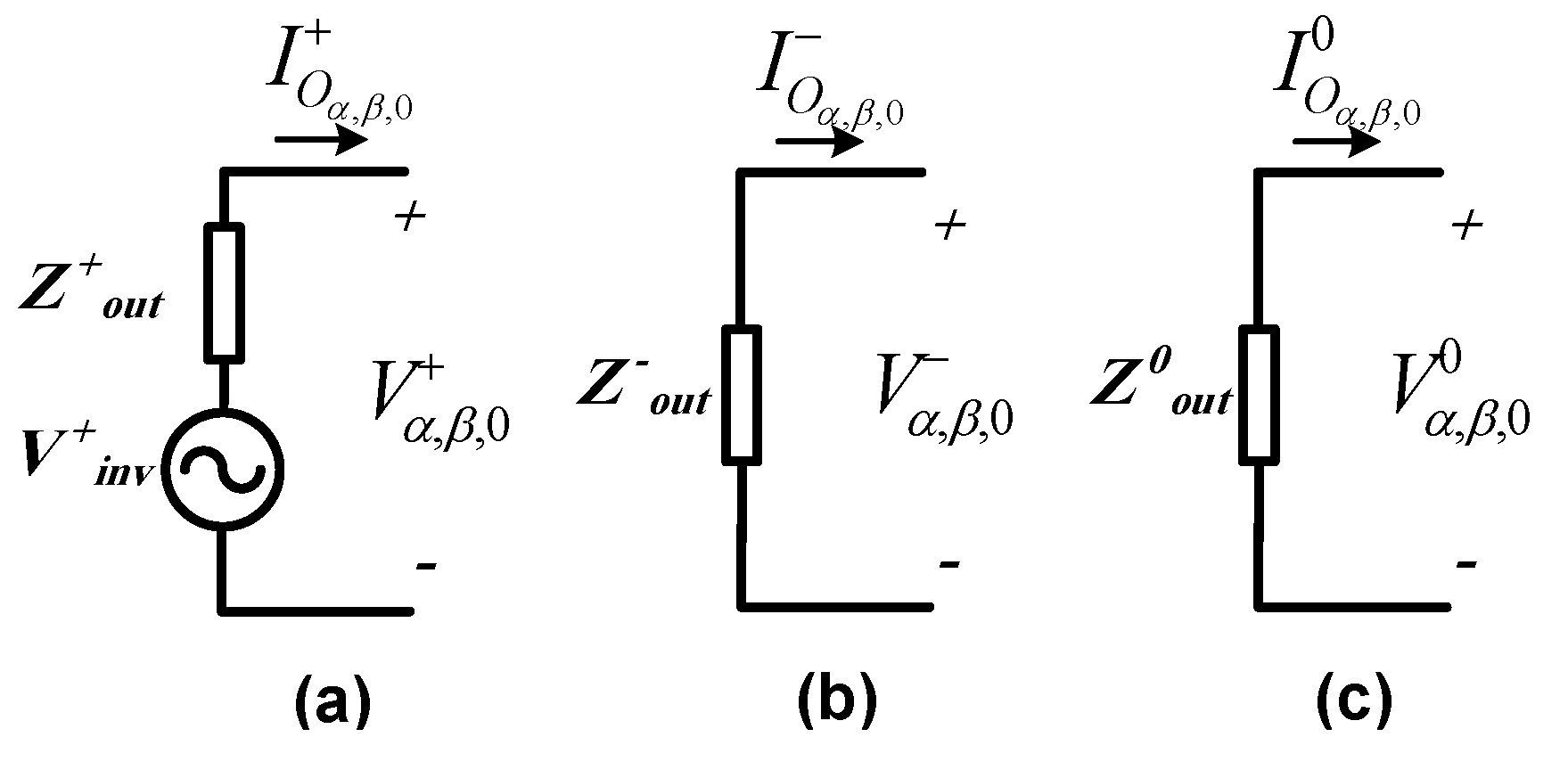
2.5.1. Positive-, Negative- and Zero-Sequence Models of DG Units
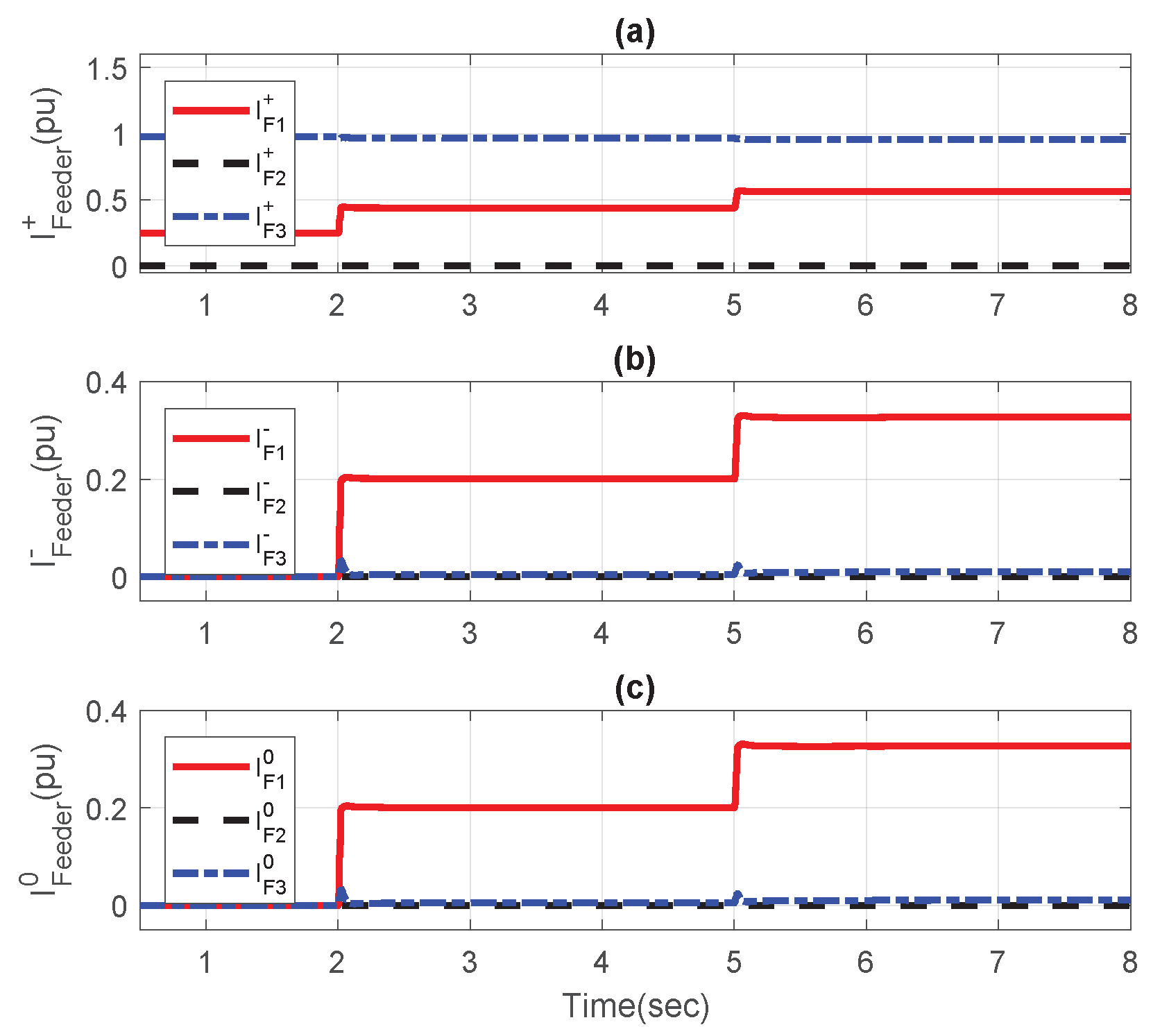
2.5.2. Negative- and Zero-Sequence Currents’ Sharing Strategy
2.6. PSCAD Implementation
3. Results and Discussion
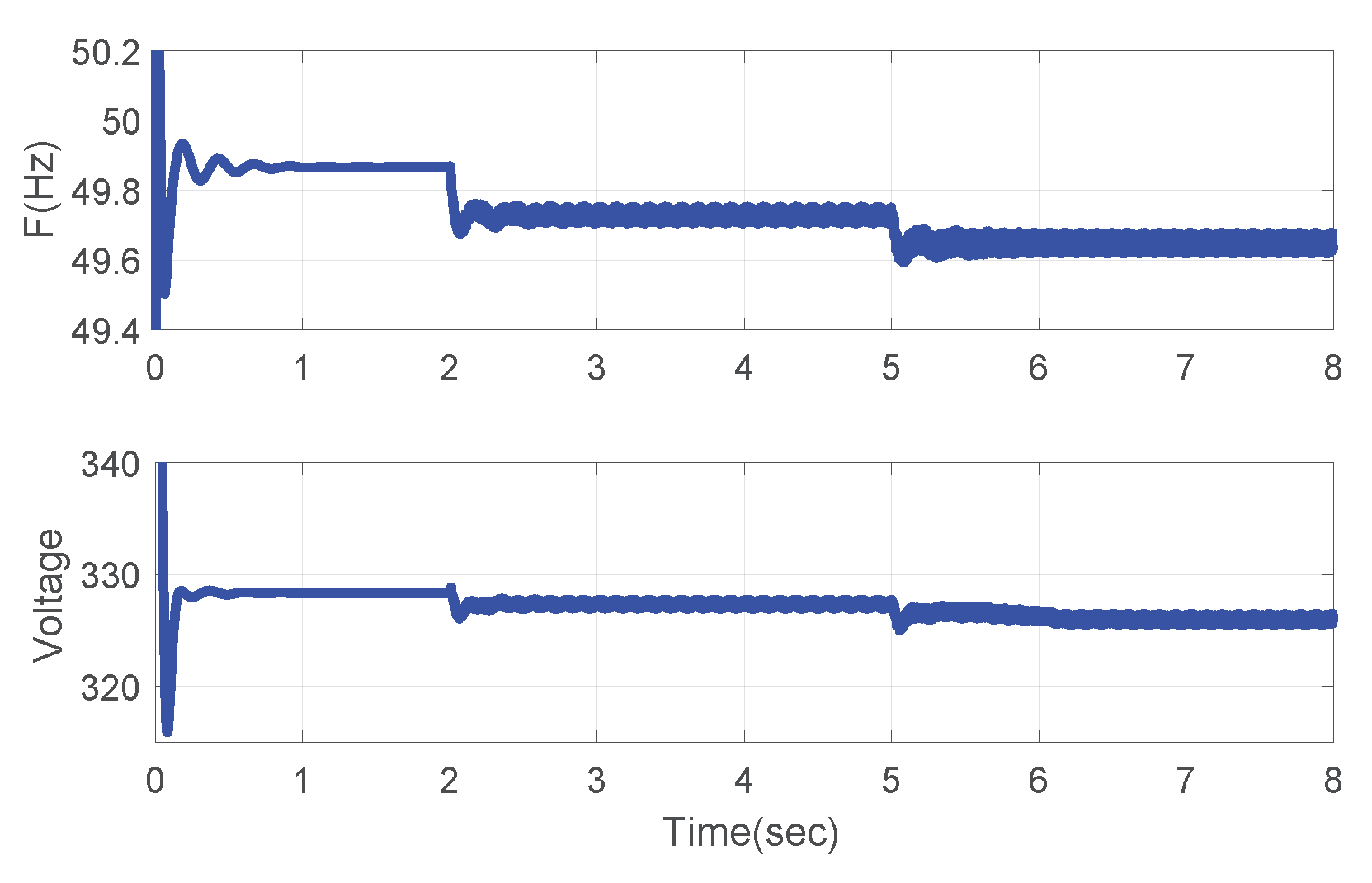
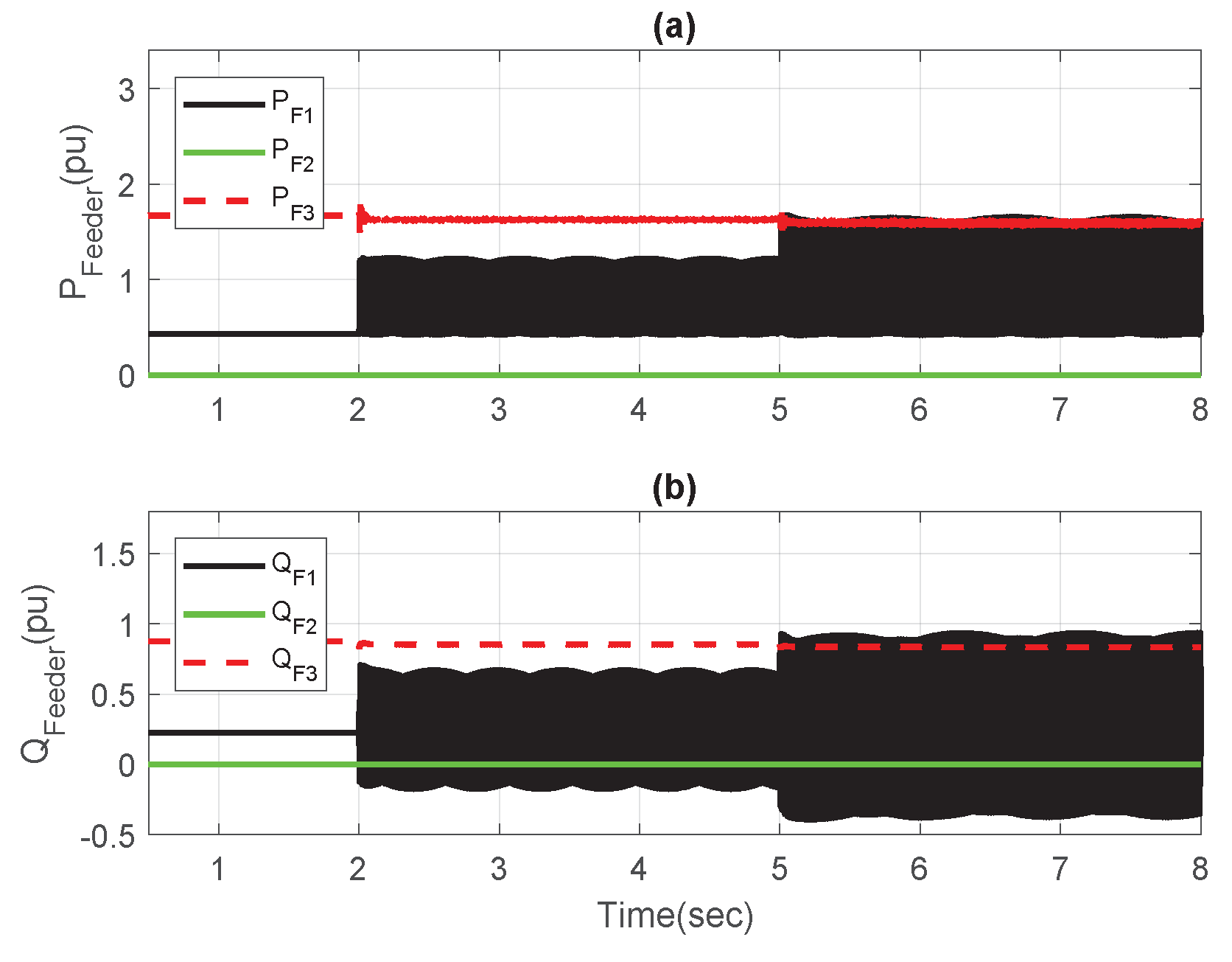
3.1. Case Study 1
3.2. Case Study 2
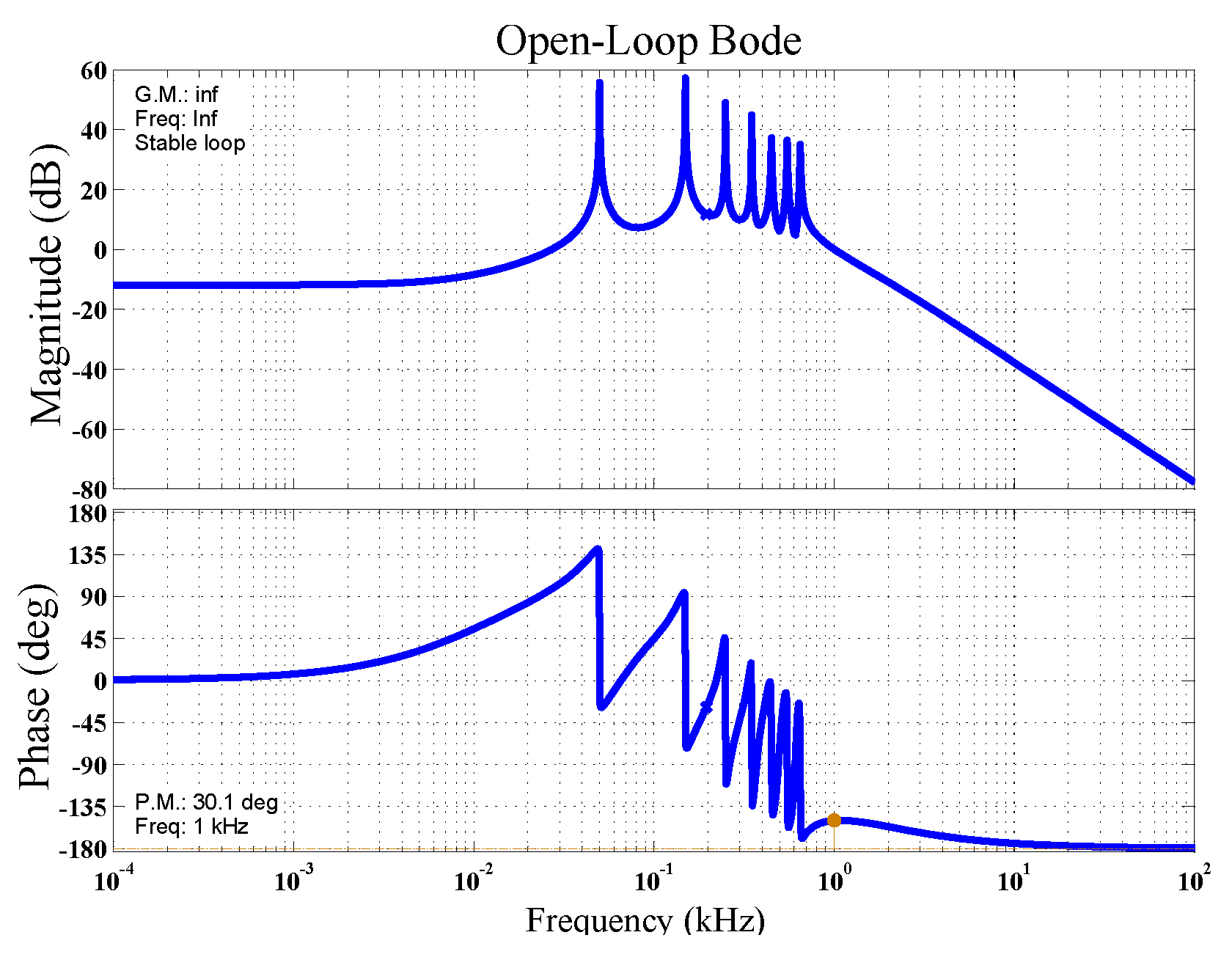
3.3. Sensitivity and Stability Studies
4. Conclusions
- control voltage and frequency while maintaining them within their allowable limits,
- share the average power among DG units, and
- effectively compensate the zero- and negative-sequence currents of unbalanced loads in a four-wired LV microgrid so that the power quality of the overall microgrid is improved.
Supplementary Materials
Supplementary File 1Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of Open Access Journals |
| TLA | Three Letter Acronym |
| LD | Linear Dichroism |
| VSI | Voltage Source Inverter |
| APF | Active Power Filter |
| VUF | Voltage Unbalanced Factor |
| kVA | kilo Volt Ampere |
| DC | Direct Current |
| AC | Alternating Current |
| MG | Micro Grid |
| DG | Distributed Generator |
| RMS | Root Mean Square |
| VZSIC | Virtual Zero Sequence Impedance Controller |
| VNSIC | Virtual Negative Sequence Impedance Controller |
| DER | Distributed Energy Resources |
| LV | Low Voltage |
| PR | Proportional-Resonant |
| THD | Total Harmonic Distortion |
| MPRC | Multi-Proportional-Resonant Controller |
| UTSP | Unified Three-Phase Signal Processor |
| PMU | Phase Measurement Unit |
| PSCAD | Power System Computer Aided Design |
| EMTDC | Electro Magnetic Transient Design and Control |
References
- Li, B.; Roche, R.; Miraoui, A. Microgrid sizing with combined evolutionary algorithm and MILP unit commitment. Appl. Energy 2017, 188, 547–562. [Google Scholar] [CrossRef]
- Shahnia, F.; Chandrasena, R.P.S. A three-phase community microgrid comprised of single-phase energy resources with an uneven scattering amongst phases. Int. J. Electr. Power Energy Syst. 2017, 84, 267–283. [Google Scholar] [CrossRef]
- Palizban, O.; Kauhaniemi, K.; Guerrero, J.M. Microgrids in active network management—Part I: Hierarchical control, energy storage, virtual power plants, and market participation. Renew. Sustain. Energy Rev. 2014, 36, 428–439. [Google Scholar] [CrossRef]
- Hochgraf, C.; Lasseter, R.H. Statcom controls for operation with unbalanced voltages. IEEE Trans. Power Deliv. 1998, 13, 538–544. [Google Scholar] [CrossRef]
- Pati, J.C.; Sahu, J.K. Unbalanced Load Compensation. Int. J. Adv. Res. Sci. Technol. 2012, 1, 74–80. [Google Scholar]
- Smith, J.C.; Hensley, G.; Ray, L. IEEE Recommended Practice for Monitoring Electric Power Quality. IEEE Std. 1995, 1159–1995. [Google Scholar]
- Shahnia, F.; Majumder, R.; Ghosh, A.; Ledwich, G.; Zare, F. Operation and control of a hybrid microgrid containing unbalanced and nonlinear loads. Electr. Power Syst. Res. 2010, 80, 954–965. [Google Scholar] [CrossRef]
- Salmerón Revuelta, P.; Pérez Litrán, S.; Prieto Thomas, J.; Salmerón Revuelta, P.; Pérez Litrán, S.; Prieto Thomas, J. 4 – Shunt Active Power Filters. In Active Power Line Conditioners; Academic Press: Cambridge, MA, USA, 2016; pp. 107–147. [Google Scholar]
- Shah, S.; Sensarma, P.S. Three Degree of Freedom Robust Voltage Controller for Instantaneous Current Sharing Among Voltage Source Inverters in Parallel. IEEE Trans. Power Electron. 2010, 25, 3003–3014. [Google Scholar] [CrossRef]
- Low, K.S.; Cao, R. Model Predictive Control of Parallel-Connected Inverters for Uninterruptible Power Supplies. IEEE Trans. Ind. Electron. 2008, 55, 2884–2893. [Google Scholar] [CrossRef]
- De, D.; Ramanarayanan, V. Decentralized Parallel Operation of Inverters Sharing Unbalanced and Nonlinear Loads. IEEE Trans. Ind. Electron. 2010, 25, 3015–3025. [Google Scholar] [CrossRef]
- Rezaei, M.M.; Soltani, J. A robust control strategy for a grid-connected multi-bus microgrid under unbalanced load conditions. Int. J. Electr. Power Energy Syst. 2015, 71, 68–76. [Google Scholar] [CrossRef]
- Jin, P.; Li, Y.; Li, G.; Chen, Z.; Zhai, X. Optimized hierarchical power oscillations control for distributed generation under unbalanced conditions. Appl. Energy 2016. [Google Scholar] [CrossRef]
- Carpinelli, G.; Mottola, F.; Proto, D.; Varilone, P. Minimizing unbalances in low-voltage microgrids: Optimal scheduling of distributed resources. Appl. Energy 2017, 191, 170–182. [Google Scholar] [CrossRef]
- Cheng, P.T.; Chen, C.A.; Lee, T.L.; Kuo, S.Y. A Cooperative Imbalance Compensation Method for Distributed-Generation Interface Converters. IEEE Trans. Ind. Appl. 2009, 45, 805–815. [Google Scholar] [CrossRef]
- Kim, J.; Guerrero, J.M.; Rodriguez, P.; Teodorescu, R.; Nam, K. Mode Adaptive Droop Control With Virtual Output Impedances for an Inverter-Based Flexible AC Microgrid. IEEE Trans. Power Electron. 2011, 26, 689–701. [Google Scholar] [CrossRef]
- Hamzeh, M.; Karimi, H.; Mokhtari, H. A New Control Strategy for a Multi-Bus MV Microgrid Under Unbalanced Conditions. IEEE Trans. Power Syst. 2012, 27, 2225–2232. [Google Scholar] [CrossRef]
- Hamzeh, M.; Karimi, H.; Mokhtari, H. Harmonic and Negative-Sequence Current Control in an Islanded Multi-Bus MV Microgrid. IEEE Trans. Smart Grid 2014, 5, 167–176. [Google Scholar] [CrossRef]
- Rowe, C.N.; Summers, T.J.; Betz, R.E.; Cornforth, D.J.; Moore, T.G. Arctan Power–Frequency Droop for Improved Microgrid Stability. IEEE Trans. Power Electron. 2013, 28, 3747–3759. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Jørgensen, B.N.; Catalão, J.P.S. A control plan for the stable operation of microgrids during grid-connected and islanded modes. Electr. Power Syst. Res. 2015, 129, 10–22. [Google Scholar] [CrossRef]
- Savaghebi, M.; Jalilian, A.; Vasquez, J.C.; Guerrero, J.M. Secondary Control for Voltage Quality Enhancement in Microgrids. IEEE Trans. Smart Grid 2012, 3, 1893–1902. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Yazdani, A. Islanded-mode control of electronically coupled distributed-resource units under unbalanced and nonlinear load conditions. IEEE Trans. Power Deliv. 2011, 26, 661–673. [Google Scholar] [CrossRef]
- Quan, X.; Dou, X.; Wu, Z.; Hu, M.; Yuan, J. Harmonic voltage resonant compensation control of a three-phase inverter for battery energy storage systems applied in isolated microgrid. Electr. Power Syst. Res. 2016, 131, 205–217. [Google Scholar] [CrossRef]
- Saim, A.; Mellah, R.; Houari, A.; Machmoum, M.; Djerioui, A. Adaptive resonant based multi-loop control strategy for parallel distributed generation units in standalone microgrid application. Electr. Power Syst. Res. 2017, 143, 262–271. [Google Scholar] [CrossRef]
- Abdelaziz, M.M.A.; El-Saadany, E.F. Economic droop parameter selection for autonomous microgrids including wind turbines. Renew. Energy 2015, 82, 108–113. [Google Scholar] [CrossRef]
- Dasgupta, S.; Mohan, S.N.; Sahoo, S.K.; Panda, S.K. A plug and play operational approach for implementation of an autonomous-micro-grid system. IEEE Trans. Ind. Inform. 2012, 8, 615–629. [Google Scholar] [CrossRef]
- Sao, C.; Lehn, P. Autonomous Load Sharing of Voltage Source Converters. IEEE Trans. Power Deliv. 2005, 20, 1009–1016. [Google Scholar] [CrossRef]
- Mohamed, Y.; El-Saadany, E. Adaptive Decentralized Droop Controller to Preserve Power Sharing Stability of Paralleled Inverters in Distributed Generation Microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Tuladhar, A.; Jin, H.; Unger, T.; Mauch, K. Parallel operation of single phase inverter modules with no control interconnections. In Proceedings of the Twelfth Annual Applied Power Electronics Conference and Exposition (APEC’ 1997), Atlanta, GA, USA, 23–27 February 1997; Volume 1, pp. 94–100. [Google Scholar]
- Guerrero, J.M.; Hang, L.; Uceda, J. Control of distributed uninterruptible power supply systems. IEEE Trans. Ind. Electron. 2008, 55, 2845–2859. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Guerrero, J.; GarciadeVicuna, L.; Matas, J.; Castilla, M.; Miret, J. Output Impedance Design of Parallel-Connected UPS Inverters With Wireless Load-Sharing Control. IEEE Trans. Ind. Electron. 2005, 52, 1126–1135. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, M.; Liu, F.; Kang, Y. Instantaneous Current Sharing Control Strategy for Parallel Operation of UPS Modules Using Virtual Impedance. IEEE Trans. Power Electron. 2011, 28, 432–440. [Google Scholar] [CrossRef]
- Harnefors, L.; Bongiorno, M.; Lundberg, S. Input-Admittance Calculation and Shaping for Controlled Voltage-Source Converters. IEEE Trans. Ind. Electron. 2007, 54, 3323–3334. [Google Scholar] [CrossRef]
- Li, Y.W.; Kao, C.-N. An Accurate Power Control Strategy for Power-Electronics-Interfaced Distributed Generation Units Operating in a Low-Voltage Multibus Microgrid. IEEE Trans. Power Electron. 2009, 24, 2977–2988. [Google Scholar] [CrossRef]
- Marwali, M.N.; Keyhani, A. Control of distributed generation systems-part I: voltages and currents control. IEEE Trans. Power Electron. 2004, 19, 1541–1550. [Google Scholar] [CrossRef]
- Ghazanfari, A.; Hamzeh, M.; Mokhtari, H.; Karimi, H. Active power management of multi-hybrid fuel cell/supercapacitor power conversion system in a medium voltage microgrid. IEEE Trans. Smart Grid 2012, 3, 1903–1910. [Google Scholar] [CrossRef]
- Akagi, H.; Watanabe, E.H.; Aredes, M. Instantaneous Power Theory and Applications to Power Conditioning; Wiley: hoboken, NJ, USA, 2007. [Google Scholar]
- Hamzeh, M.; Karimi, H.; Mokhtari, H.; Mahseredjian, J. Control of a microgrid with unbalanced loads using virtual negative-sequence impedance loop. In Proceedings of the 5th Annual International Power Electronics, Drive Systems and Technologies Conference (PEDSTC 2014), Tehran, Iran, 5–6 February 2014; pp. 78–83. [Google Scholar] [CrossRef]
- Chandorkar, M.; Divan, D.; Adapa, R. Control of parallel connected inverters in standalone AC supply systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef]
- Karimi, H.; Yazdani, A.; Iravani, R. Negative-Sequence current injection for fast islanding detection of a distributed resource unit. IEEE Trans. Power Electron. 2008, 23, 298–307. [Google Scholar] [CrossRef]
- Cooper, C. IEEE recommended practice for electric power distribution for industrial plants. Electron. Power 1987, 33, 658. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ||
|---|---|---|
| - | ||
| 1 | 17.71 | |
| 600 | ||
| - | ||
| Parameter | Value | Comments |
|---|---|---|
| 300 kVA | DG ratings | |
| 0.04 + j 0.0157 | 0.8 km overhead line | |
| 0.07 + j 0.0332 | 1.3 km overhead line | |
| 0.01 + j 0.0022 | 0.2 km overhead line | |
| , | 0.3 mH | series filter inductance |
| , | 0.0015 Ω | series filter resistance |
| , | 2200 F | filter capacitance |
| 1500 V | DC bus voltage | |
| 6 kHz | switching frequency | |
| , | 100 KW | maximum real power |
| , | 100 kVAr | maximum reactive power |
| , | 3.33 Hz/MW | P-f droop coefficients |
| , | 3.26V/MVAr | Q-V droop coefficients |
| , | 97 A (0.13 p.u.) | |
| , | 97 A (0.13 p.u.) | |
| , | 3, 1 | VNSIC parameters of |
| , | 3, 1 | VNSIC parameters of |
| , | 1, 2 | VZSIC parameters of |
| , | 1, 2 | VZSIC parameters of |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Najafi, F.; Hamzeh, M.; Fripp, M. Unbalanced Current Sharing Control in Islanded Low Voltage Microgrids. Energies 2018, 11, 2776. https://doi.org/10.3390/en11102776
Najafi F, Hamzeh M, Fripp M. Unbalanced Current Sharing Control in Islanded Low Voltage Microgrids. Energies. 2018; 11(10):2776. https://doi.org/10.3390/en11102776
Chicago/Turabian StyleNajafi, Foad, Mohsen Hamzeh, and Matthias Fripp. 2018. "Unbalanced Current Sharing Control in Islanded Low Voltage Microgrids" Energies 11, no. 10: 2776. https://doi.org/10.3390/en11102776
APA StyleNajafi, F., Hamzeh, M., & Fripp, M. (2018). Unbalanced Current Sharing Control in Islanded Low Voltage Microgrids. Energies, 11(10), 2776. https://doi.org/10.3390/en11102776