5.1 Bearing Fault Test Platform
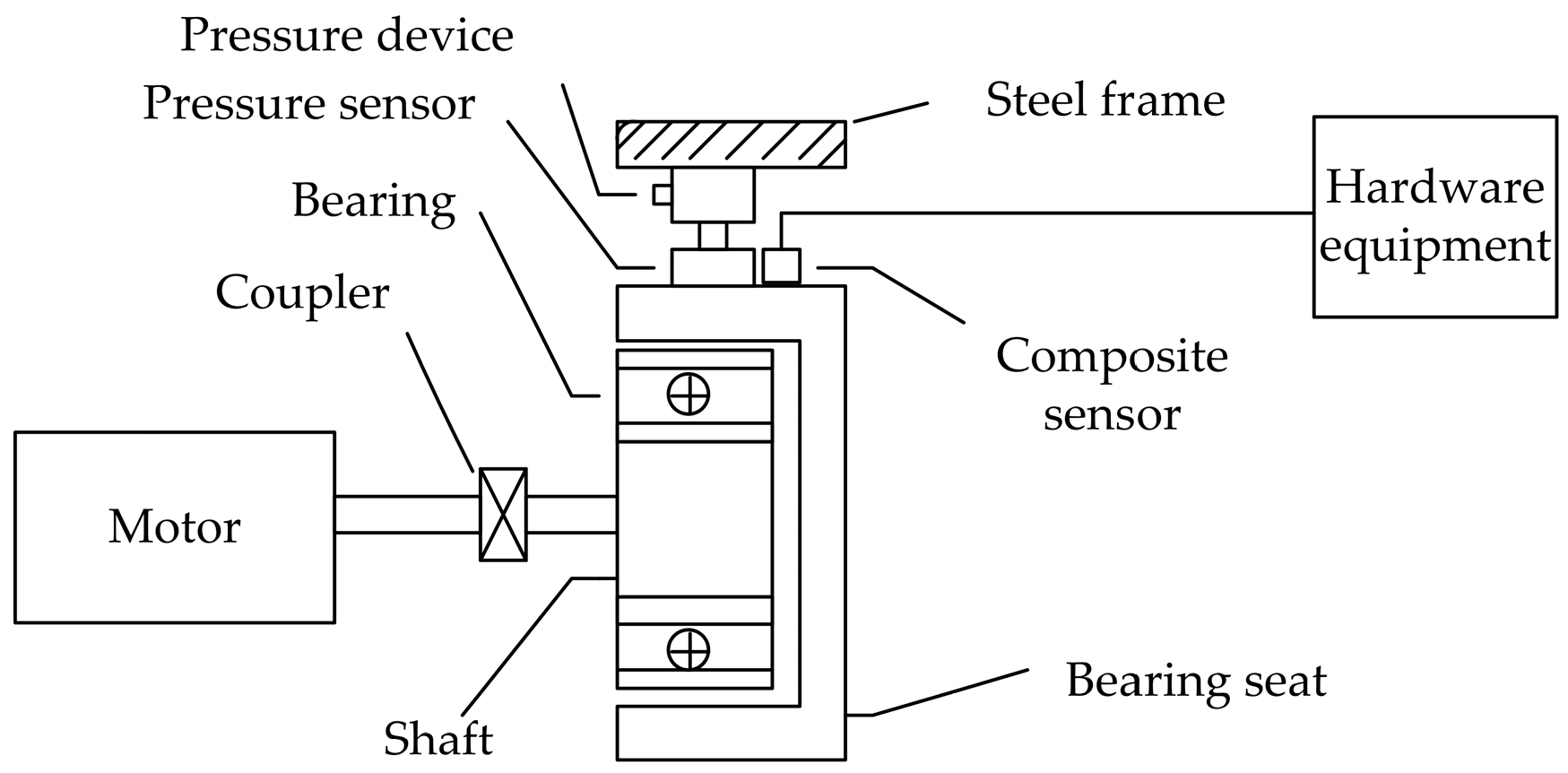
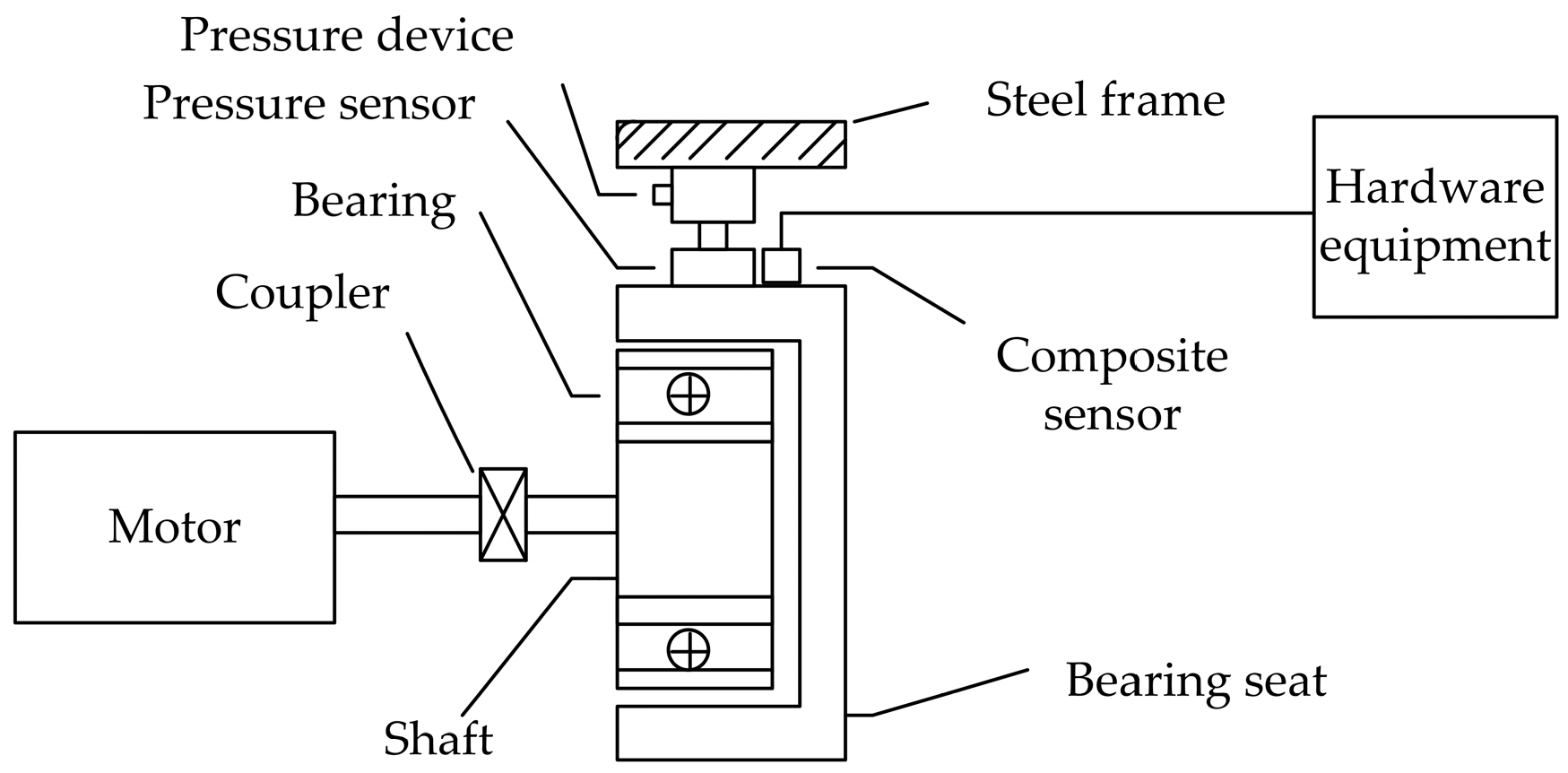
In order to verify the proposed fault diagnosis method, a test platform was constructed. The principle diagram of the platform is shown in
Figure 3.
The motor drives the bearing inner ring to rotate. When it is running, the bearing produces vibration and temperature, which will be passed to the bearing seat. The acceleration sensor fixed on the bearing seat picks up the signals. The signals are collected and analyzed by the designed hardware to determine the bearing fault condition.
In the experiment, bearings with different kinds of faults were tested alternately. In order to facilitate loading and unloading of bearings, the bearing seat is designed into two parts, which are fixed together with the screws. A coupler is used since the size of the inner ring is different from the motor shaft. In order to simulate the influence of loads on the bearing operation, a steel frame is designed over the bearing seat. A pressure device (jack) is put between the steel frame and the bearing seat to generate radial pressure on the bearing seat, which simulates the vehicle load. In addition, a pressure sensor is placed in the middle of the bearing seat to measure the value of the pressure. The bearing seat and the steel frame are fixed on iron benches on the ground by screws.
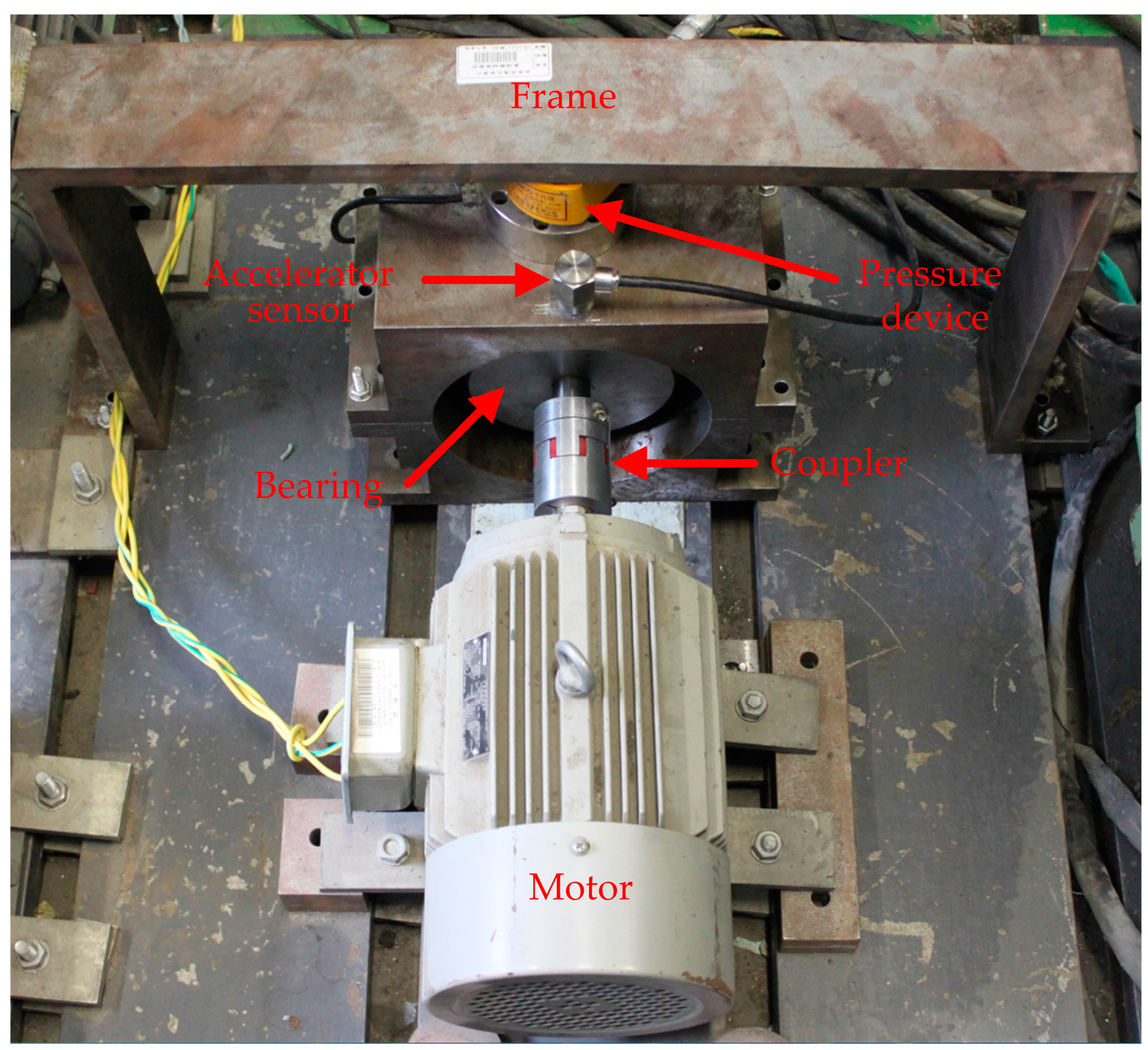
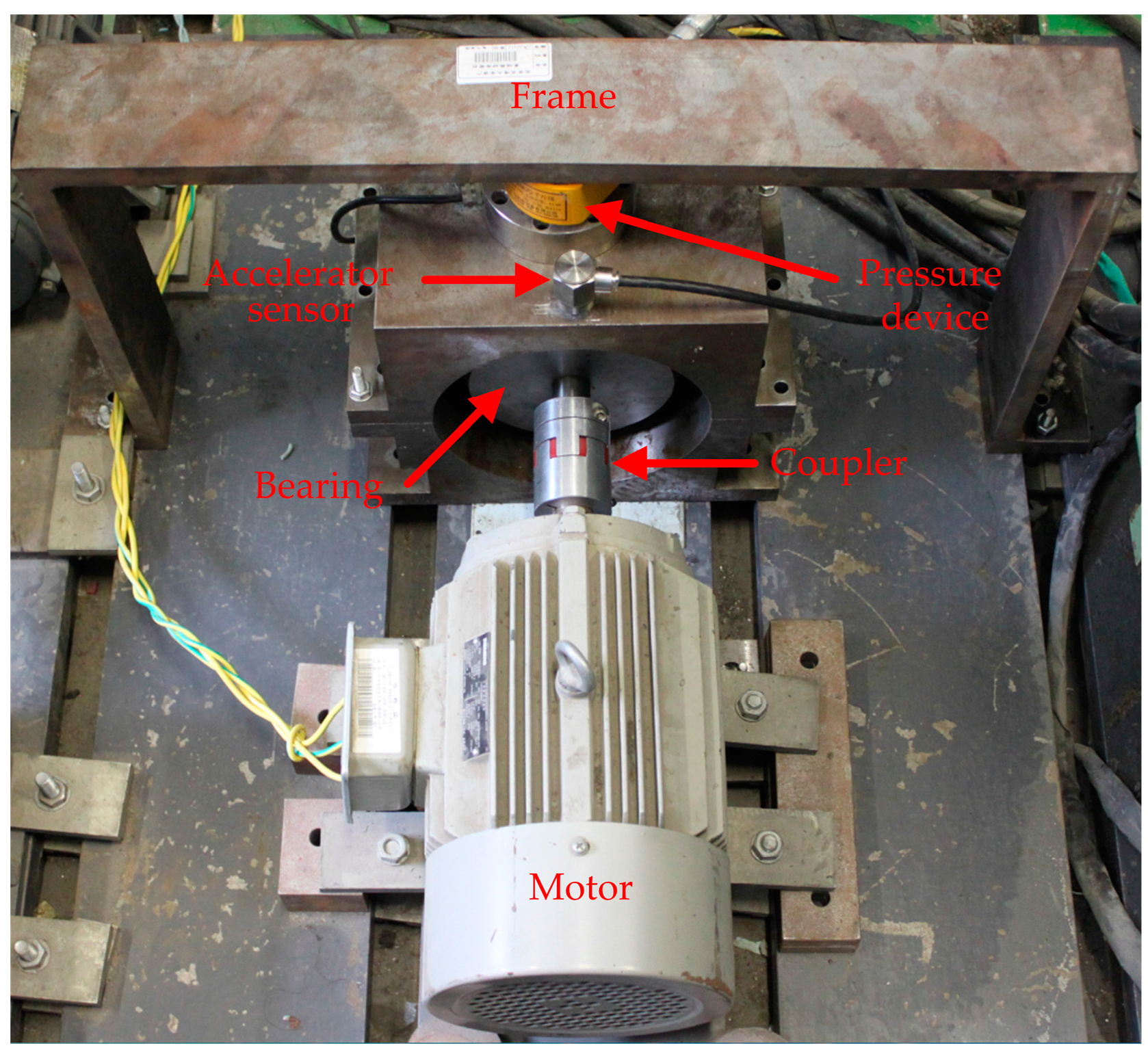
Figure 4 shows the physical test platform. A Siemens motor 1LG0106-4AA20 (Siemens Motor Co., Ltd., Jiangsu, China) was used in the test platform with rated power of 2.2 kW and rated speed of 1410 rpm. A frequency converter is used to control the motor’s speed. HK8100, a kind of composite sensor which is custom made in Qinhuangdao Hengke Science and Technology Ltd. in China, is used to collect vibration signals and temperature signals for the hardware device. The output sensitivity is 50 mV/g, the resonant frequency is bigger than 30 kHz, the transverse sensitivity ratio is smaller than 5%, the range of frequency is 1–7000 Hz and the range of temperature is −30 °C to +70 °C.
5.2. Verification Test
To verify the effectiveness of the proposed diagnosis method, the test is done with bearings that have pitting corrosion or flaking faults which were made artificially in the outer ring, inner ring and rolling element. Provided by Guangzhou Metro Company (Guangzhou, China), the bearings are cylindrical roller bearings produced by Svenska Kullager-Fabriken (SKF) in gothburger, Sweden with the model, BC1B326441A/HB1. D = 176 mm, d = 26 mm, z = 18, α = 0° (d is the rolling element diameter, D is the bearing pitch diameter, z is the number of balls, α is the contact angle). Since the speed of a metro vehicle is usually less than 80 km/h, the drive motor speed in the test platform is controlled to be 540 rpm (fr = 9 Hz) by a frequency converter. The fault characteristic frequencies of the outer ring, the inner ring and the rolling element can be calculated according to (28)–(30). To stimulate the influence of loads, the pressure is set to be 1 ton considering the stress on the steel frame. The motor was started and allowed to run for 3 h, by which time the bearing to be tested has worked steadily. Then, we collected vibration acceleration signals and temperature signals for analysis with the sampling frequency of 10 kHz (32,768 points).
(1) The test of healthy bearing
Figure 5 shows the bearing with no fault.
Figure 6a,b is the waveform of the collected vibration signals and the envelope spectrum respectively.
Figure 6a shows that there is no obvious impact pulse in the time domain waveform and
Figure 6b shows no peaks in the envelope spectrum at fault characteristic frequency. So, the bearing may be healthy.
By running the designed software, which adopts WQPCDA to fuse the collected signals, the parameters extracted in the experiment are (the software contains three kinds of fault types but we show only one):
Peak–peak ratio: P = 1.557;
Kurtosis factor: Kv = 3.591;
Axle box temperature: T0 = 26.6875 °C, T1 = 26.9375 °C, ∆T = 0.25 °C/min.
The mass functions of the three evidence sources are shown in
Table 2.The mass functions weighted are shown in
Table 3.
The fusion result based on WQPCDA is shown in
Table 4.
From
Table 4, we know that the fusion result
m does not conform to the decision rules, so the diagnosis result suggests that there is no fault in the bearing, which is consistent with the actual condition.
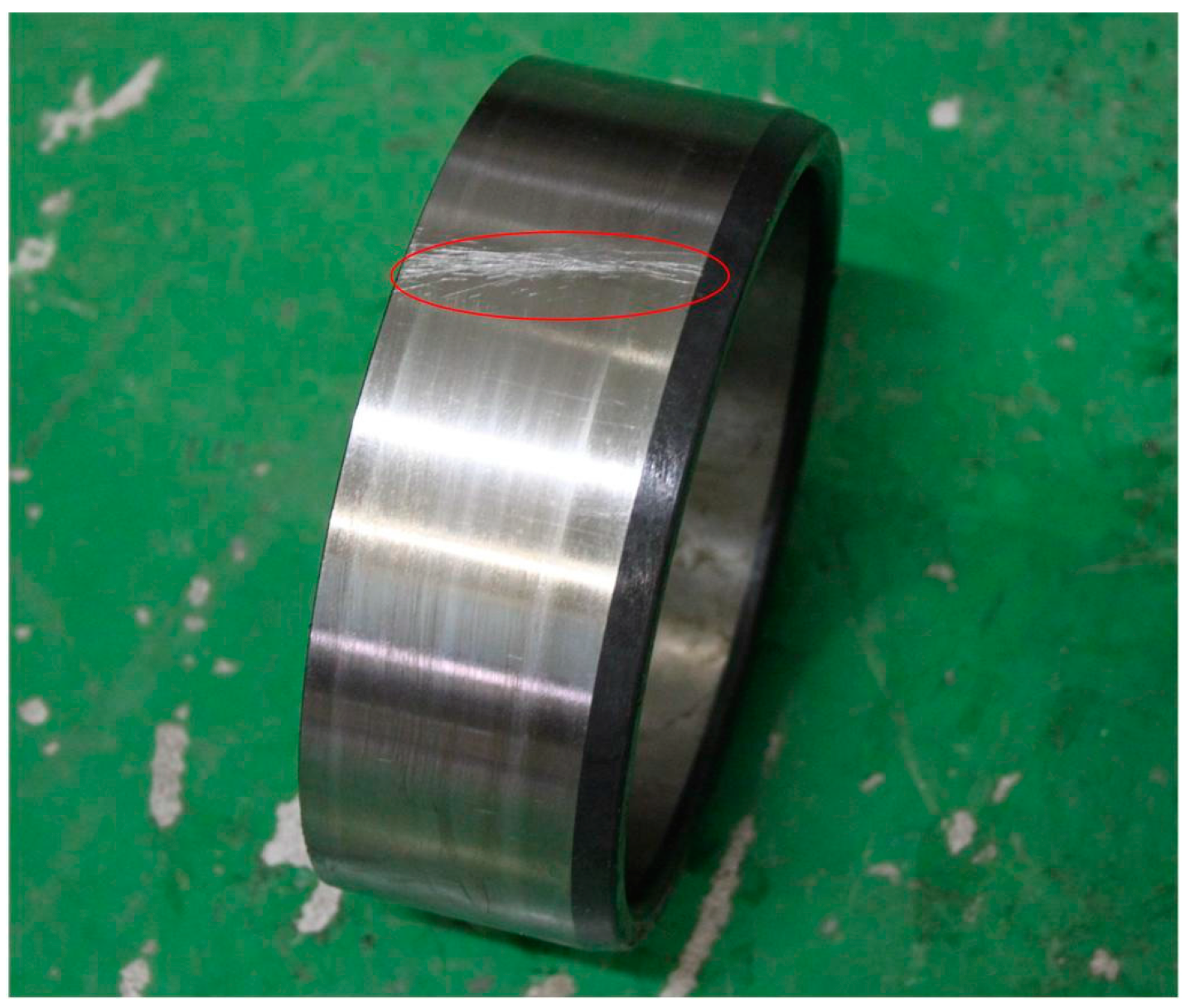
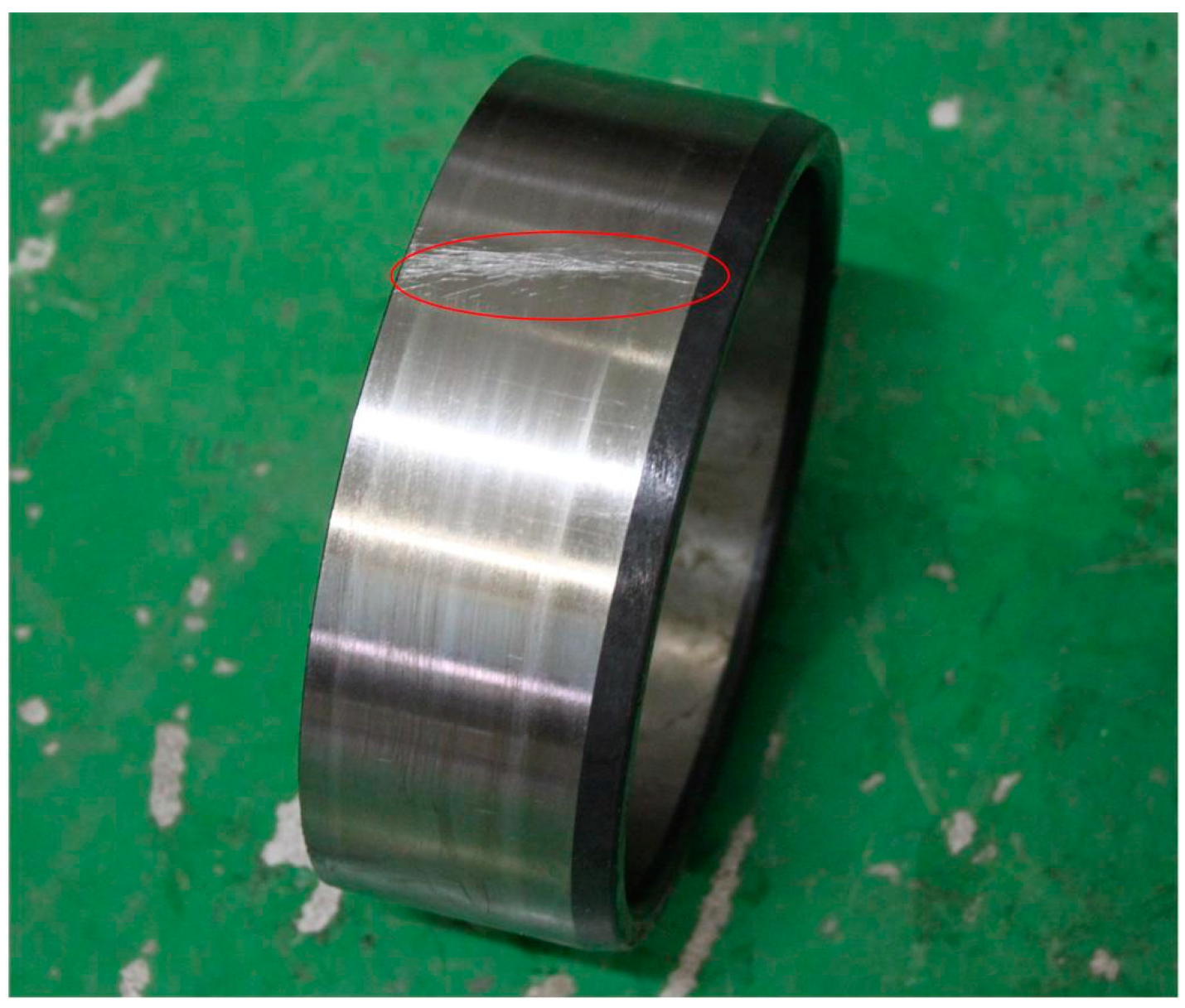
(2) The test of outer ring fault bearing
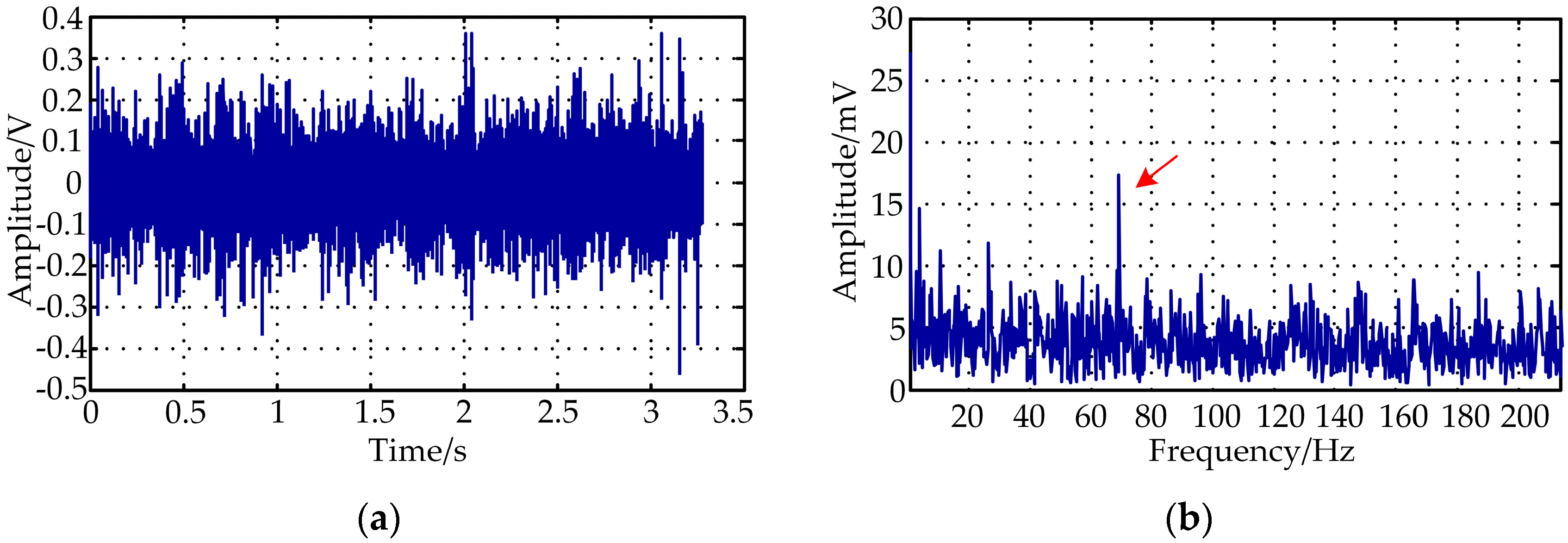
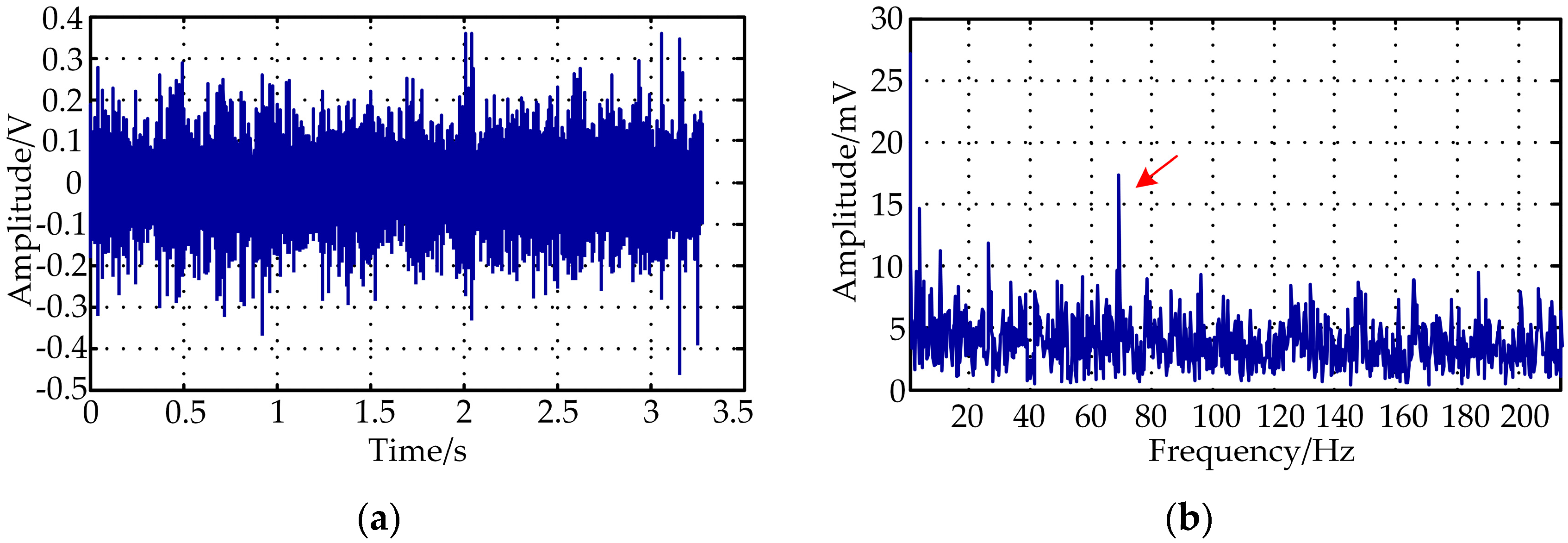
Figure 7 is the bearing with an outer ring fault. According to (28), the fault characteristic frequency of the outer ring is 69.030 Hz.
Figure 8a,b shows the waveform of the collected vibration signal and the envelope spectrum respectively.
From
Figure 8a, we can easily see that there is cyclical impact pulse in the time domain waveform of the original vibration signal. From
Figure 8b, we can see an obvious peak in the envelope spectrum at 68.66 Hz, and this frequency belongs to the acceptable range of the outer ring fault characteristic frequency. So, there may be a fault in outer ring.
By running the designed software, the parameters extracted in the experiment are:
Peak–peak ratio at outer ring fault characteristic frequency: P = 2.114;
Kurtosis factor: Kv = 5.307;
Axle box temperature: T0 = 24.8125 °C, T1 = 25.0 °C, ∆T = 0.1875°C/min.
The mass functions of the three evidence sources are shown in
Table 5.
The weighted mass functions are shown in
Table 6.
The fusion result based on WQPCDA is shown in
Table 7.
From
Table 7, we know that the fusion result,
conforms to the decision rules, so the output is
S = 1.
The diagnosis result suggests that there is a fault in the outer ring, which is consistent with the actual condition. The proposed bearing fault diagnosis method is tested as being effective.
(3) The test of inner ring fault bearing
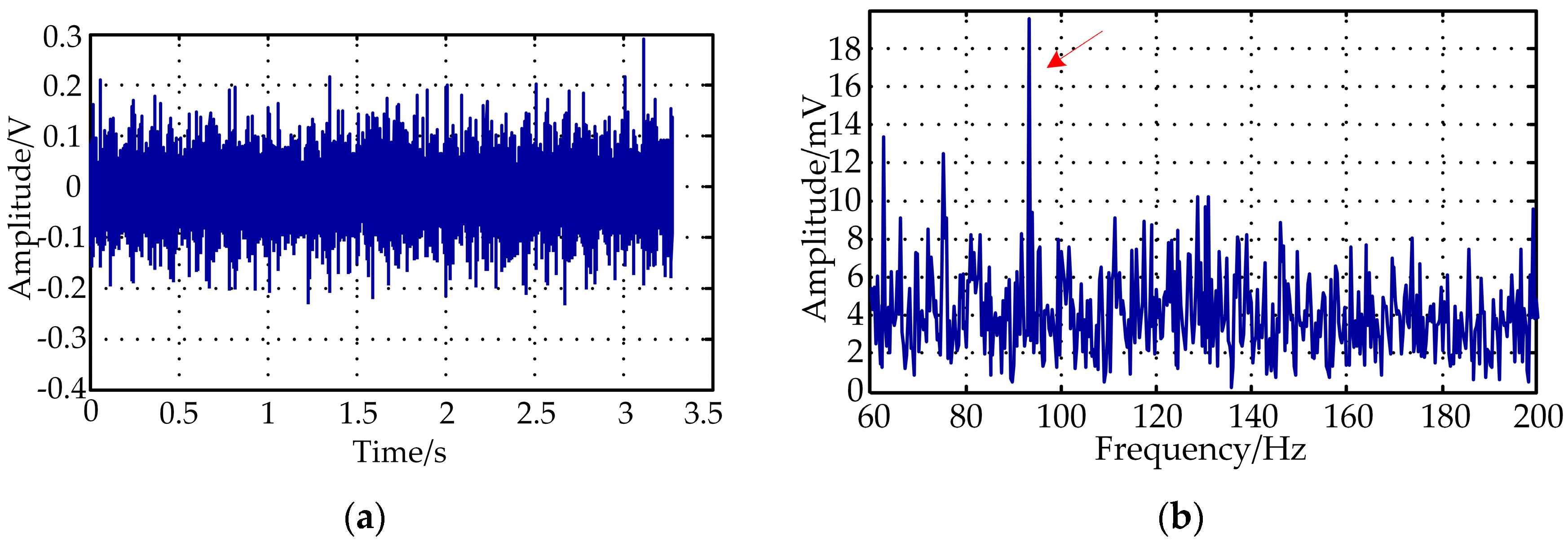
The bearing with an inner ring fault is shown in
Figure 9. According to Equation (29), the fault characteristic frequency of the inner ring is 92.970 Hz.
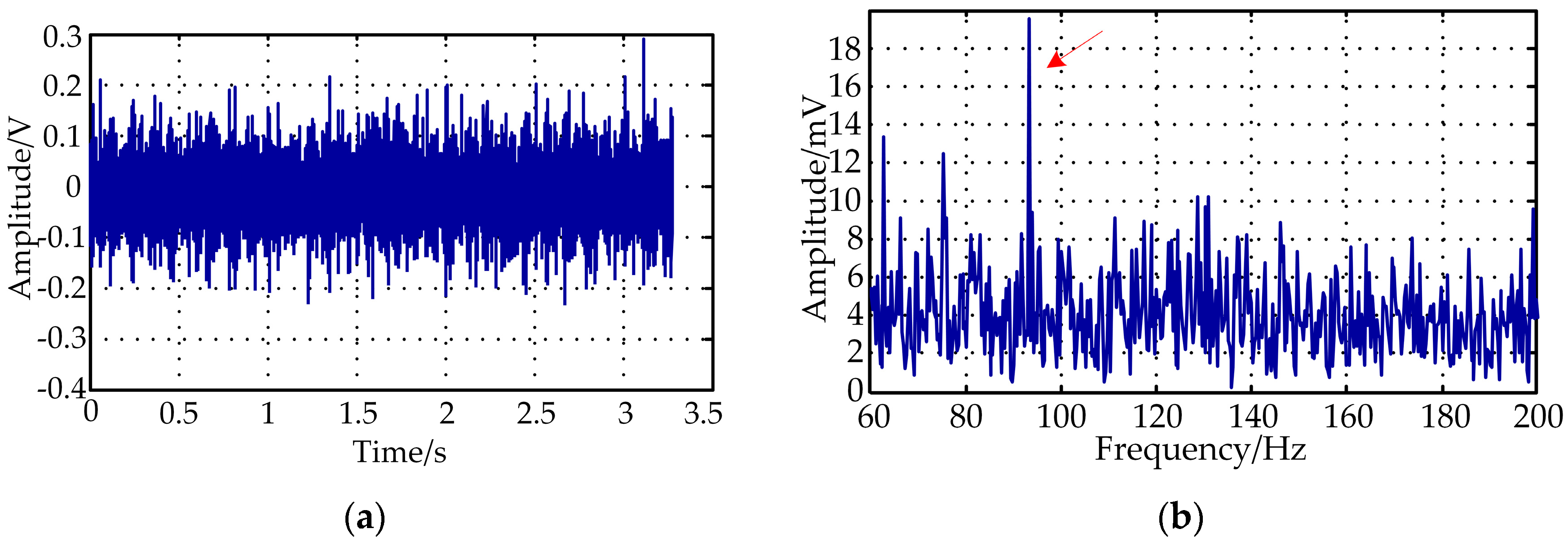
Figure 10a,b shows the waveform of the collected vibration signal and the envelope spectrum, respectively.
By running the designed software, the parameters extracted in the experiment are:
Peak–peak ratio at inner ring fault characteristic frequency: P = 2.365;
Kurtosis factor: Kv = 5.086;
Axle box temperature: T0 = 24.0 °C, T1 = 24.0625 °C, ∆T = 0.0625 °C/min.
The mass functions of the three evidence sources are shown in
Table 8.
The weighted mass functions are shown in
Table 9.
The fusion result based on WQPCDA is shown in
Table 10.
From
Table 10, we know that the fusion result,
conforms to the decision rules, so the output is
U = 1.
The diagnosis result suggests that there is a fault in the inner ring, and this is consistent with the actual condition. The proposed bearing fault diagnosis method is tested to be effective.
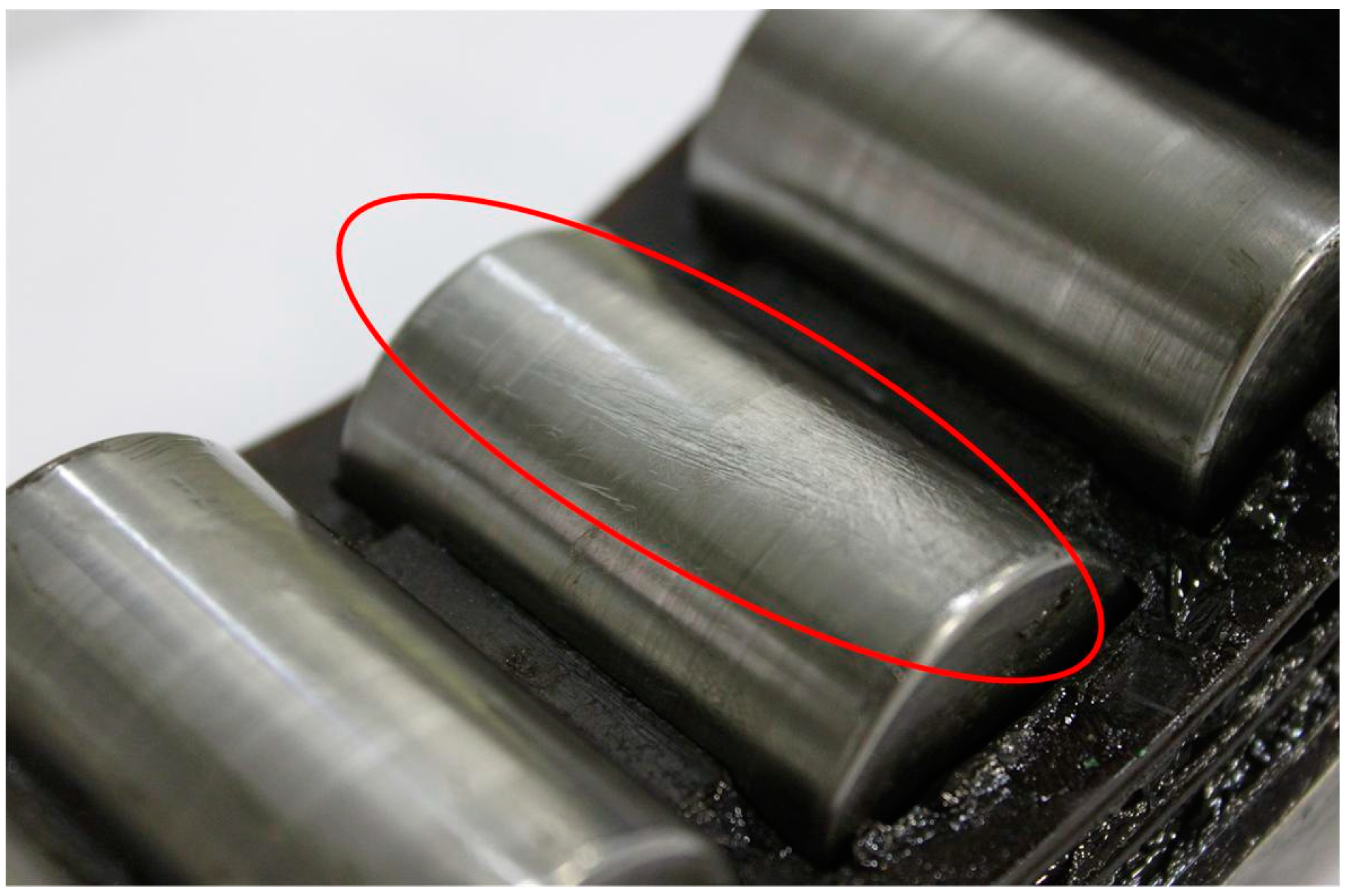
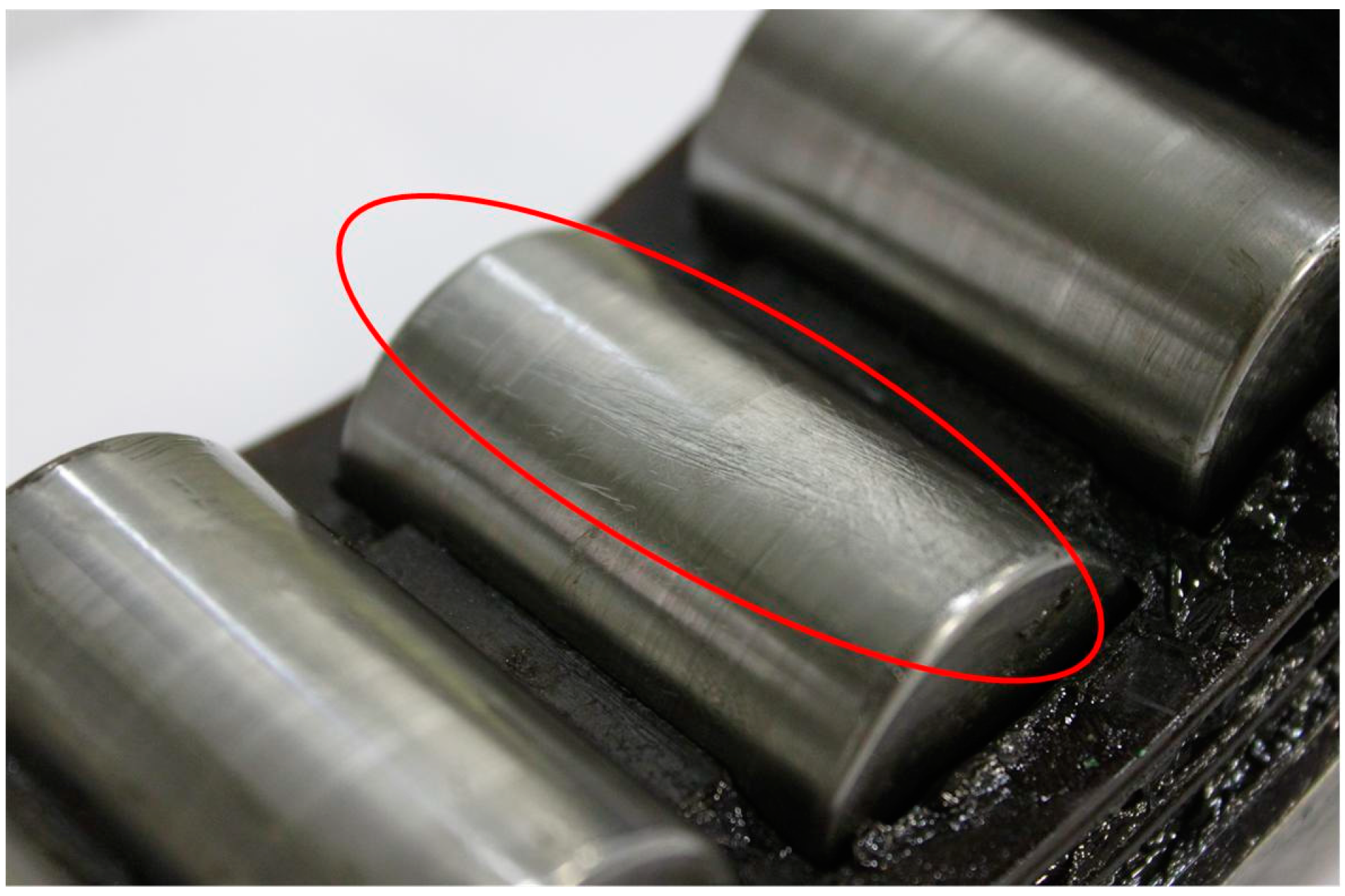
(4) The test of rolling element fault bearing
The bearing with a rolling element fault is shown in
Figure 11. According to (30), the fault characteristic frequency of the rolling element is 29.796 Hz.
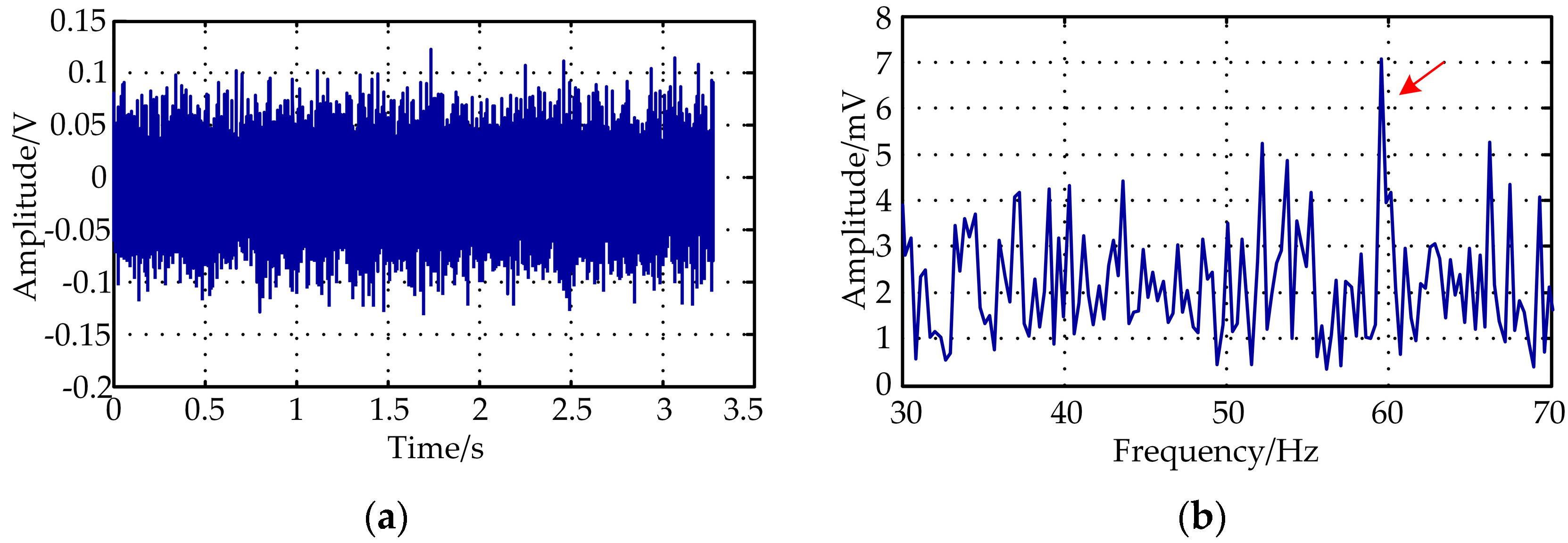
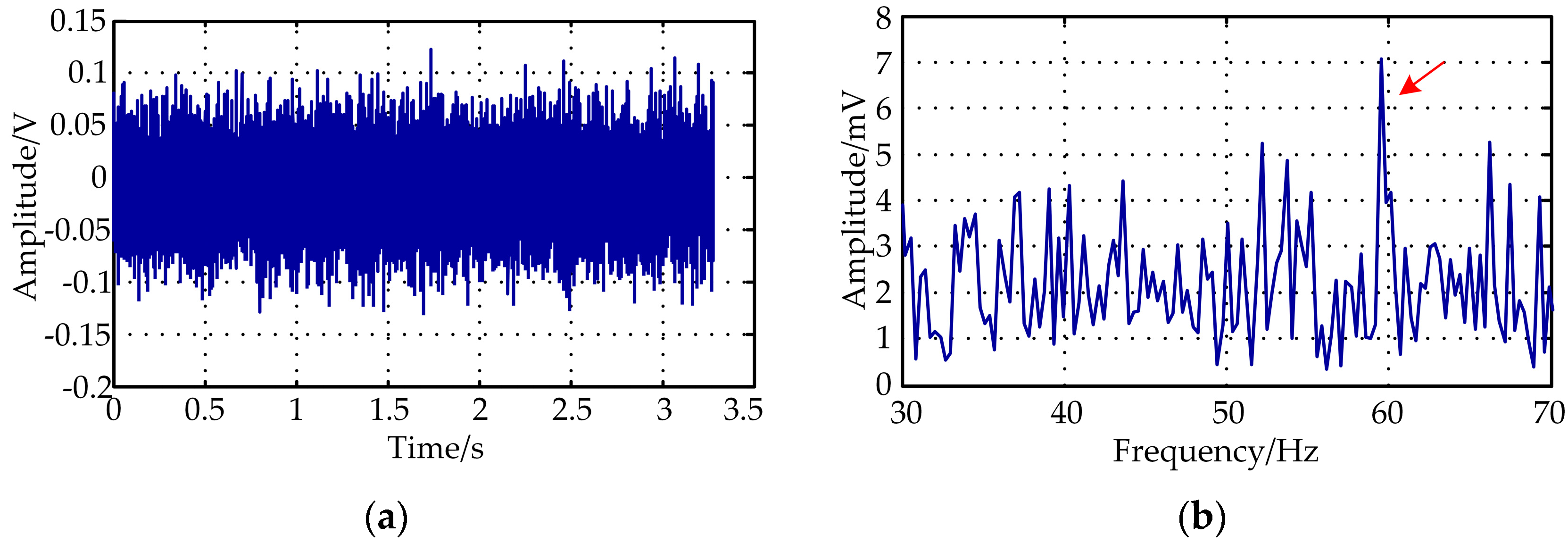
Figure 12a,b show the waveform of the collected vibration signal and the envelope spectrum, respectively.
From
Figure 12b, we can see an obvious peak in the envelope spectrum at 59.506 Hz, which belongs to the acceptable range of double frequency of rolling element faults. By running the designed software, the parameters extracted in the experiment are:
Peak–peak ratio at rolling element fault characteristic frequency: P = 1.699;
Kurtosis factor: Kv = 3.866;
Axle box temperature: T0 = 25.0625 °C, T1 = 25.125 °C, ∆T = 0.0625 °C/min.
The mass functions of the three evidence sources are shown in
Table 11.The mass weighted functions are shown in
Table 12.
The fusion result based on WQPCDA is shown in
Table 13.
From
Table 13, we know that the fusion result,
conforms to the decision rules, so the output is
V = 1.
The diagnosis result suggests that there is a fault in the rolling element, and this is consistent with the actual condition. The proposed bearing fault diagnosis method is tested as being effective.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}