This section presents a comparative analysis of the grid-faulty control schemes considered in this study. Advantages and disadvantages of the control schemes are revealed and the scheme with the best performance during voltage sags is identified. The analysis is validated with MATLAB© (2014a, MathWorks, Natick, MA, USA) simulation results.
4.1. Simulation Setup
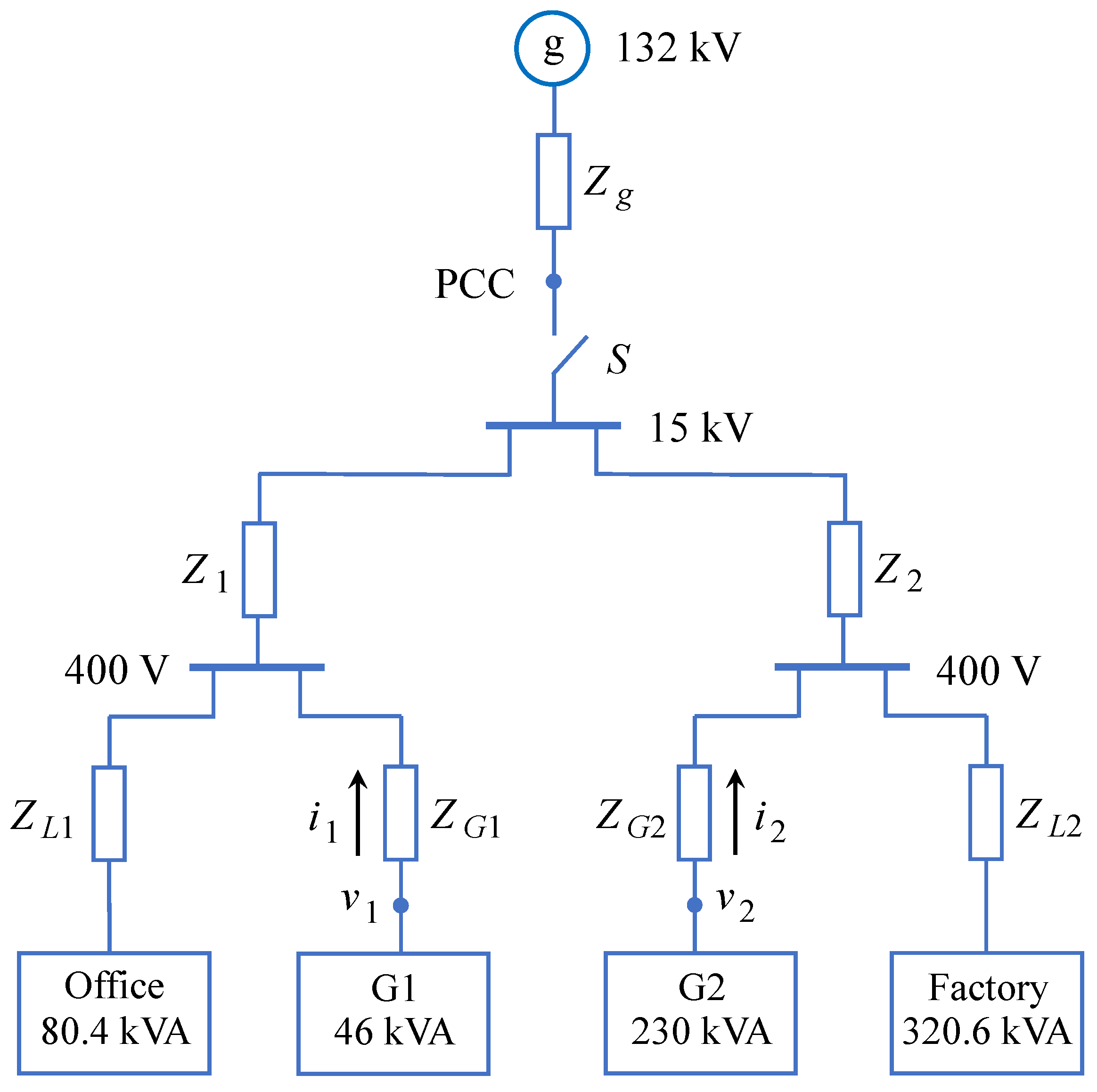
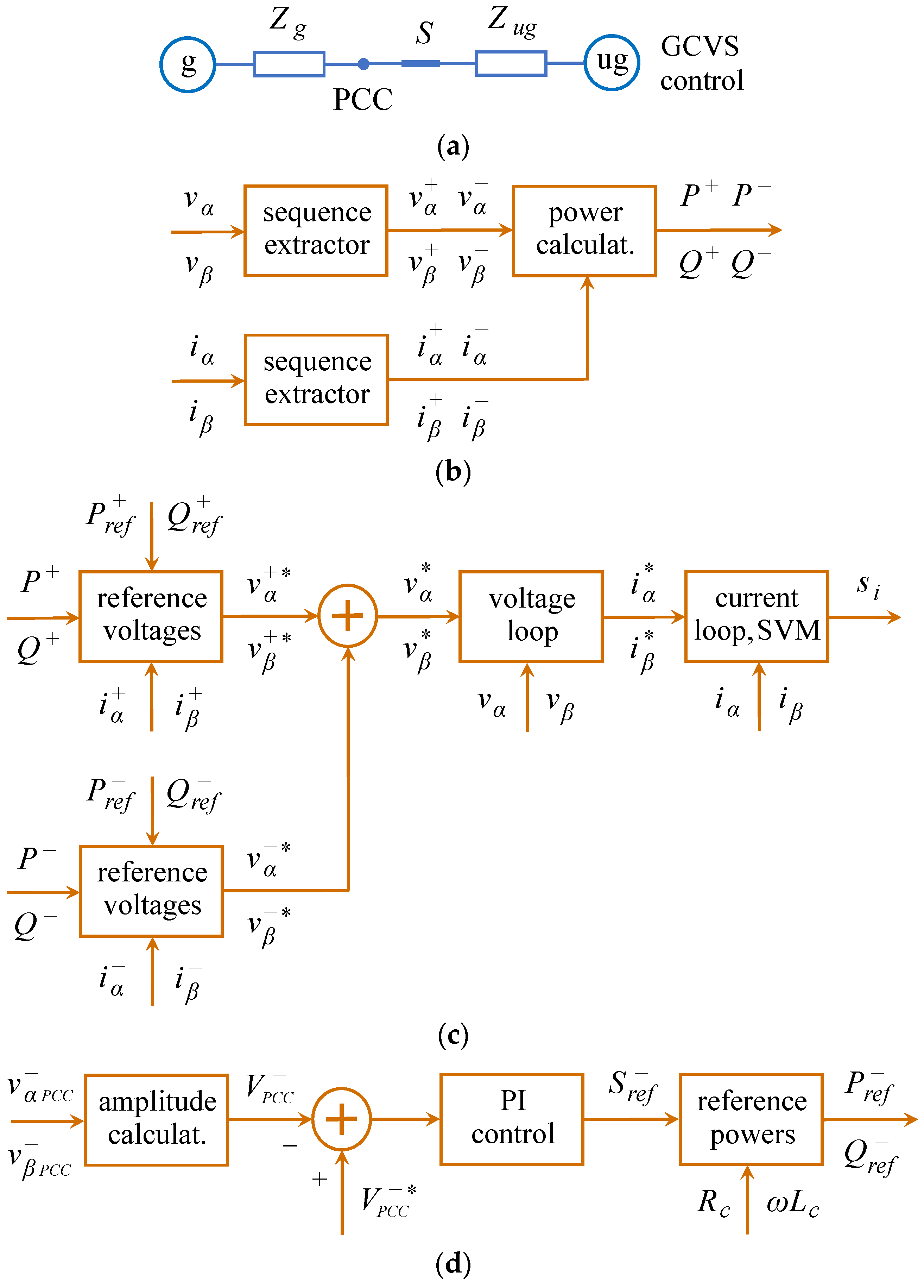
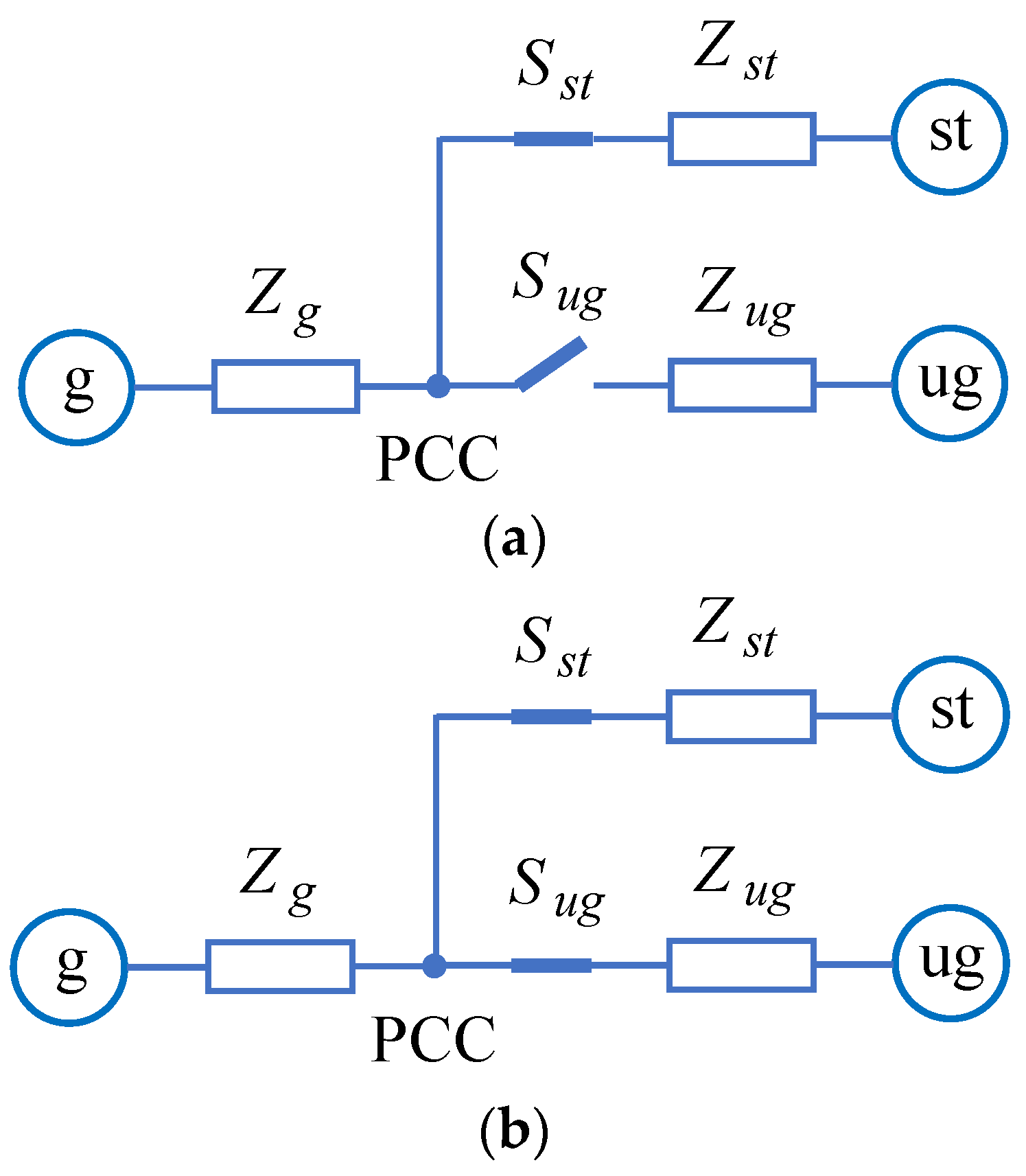
The microgrid shown in
Figure 1 was programmed in MATLAB© using the SimPowerSystems© toolbox. The control schemes presented in
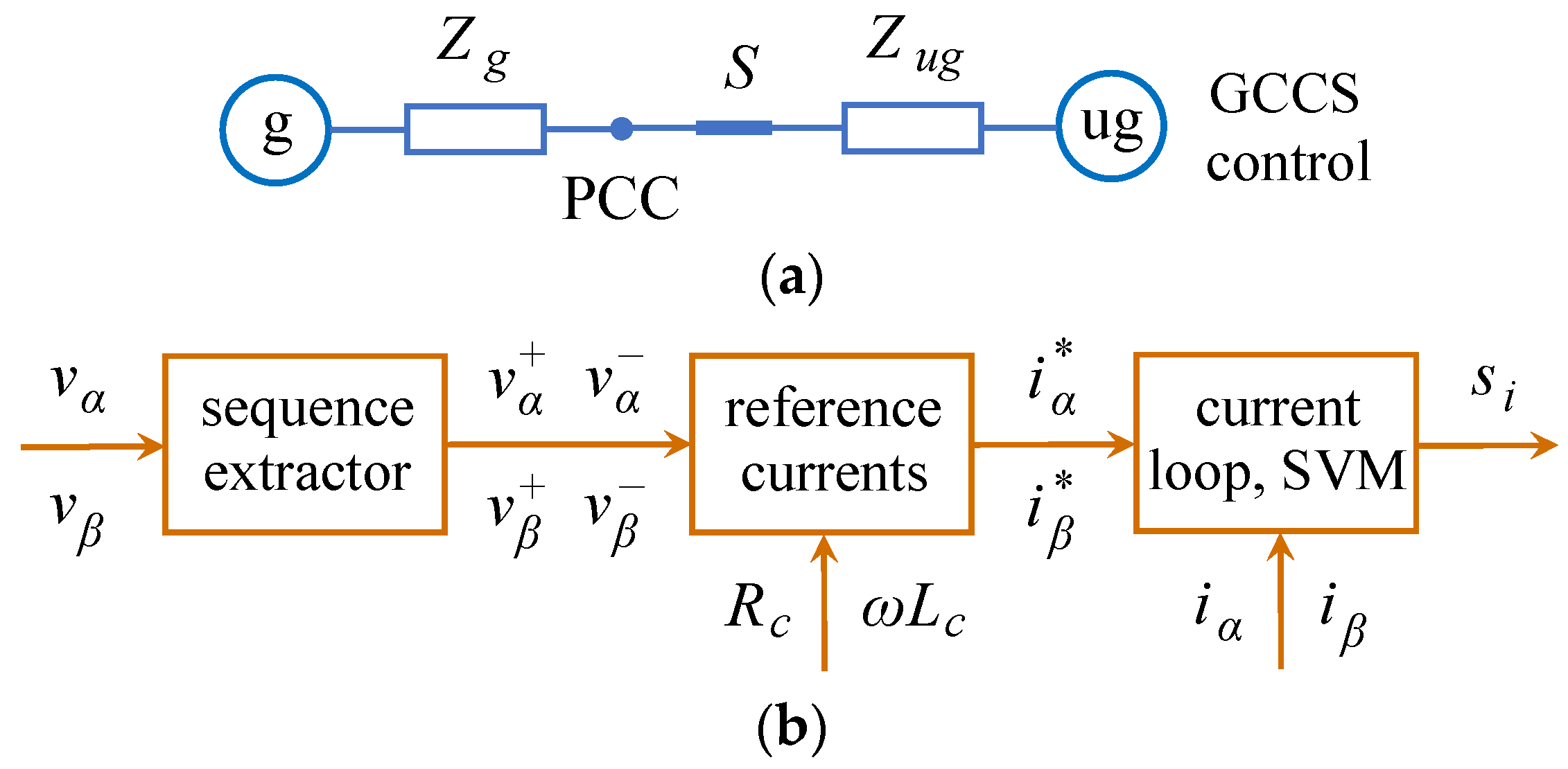
Figure 3,
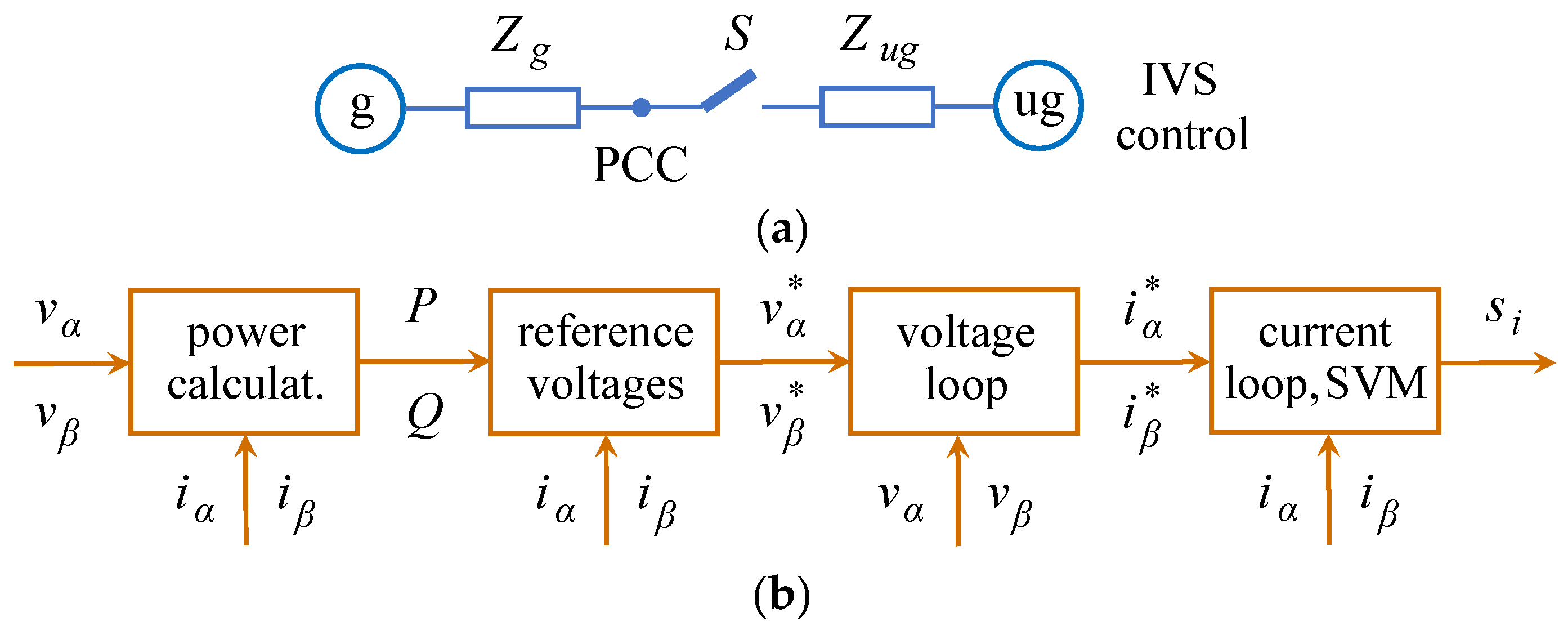
Figure 4 and
Figure 5 were modelled in embeddable C code with MATLAB© S-functions blocks. The sampling frequency of these controllers was 10 kHz.
Table 2 lists the parameters of the control schemes. Top, medium and bottom sections report the parameters of GCCS, IVS and GCVS schemes, respectively. It is worth mentioning the large number of control parameters of the GCVS scheme compared to the GCCS scheme. This fact reveals the different complexity of the considered control schemes.
The design of the control parameters has a significant effect on the operation of the microgrid. The design guidelines provided in [
17,
25,
30] are used to properly tune the parameters of GCCS, IVS and GCVS control schemes, respectively. In particular, the gains of the PI controllers only impact on the dynamic characteristics of the microgrid, providing a fast transient response with small overshoot when the design guidelines are observed. The rest of the indices (apart from
) are measured in steady state and do not depend on the gains of the PI controllers.
Three voltage sags are considered below to evaluate the performance of the control schemes. The characteristics of these voltage sags are listed in
Table 3. The first voltage sag belongs to the type I category in which the voltage drop in one phase is greater than in the others. The second is a type II voltage sag with two phases with lower voltages than in the last phase. The third is a type III voltage sag with no negative sequence voltage and, thus, with the same amplitude reduction in all the phase voltages. Further details on the classification of the voltage sags as type I, II and III are found in [
40]. Using the classification in [
32], the three voltage sags are denoted as types C, D and A, respectively.
4.2. Measured Quality Indexes and Discussion of the Results
Table 4 shows the quality indexes measured for the control schemes considering the type I voltage sag. The column Ideal lists the ideal values of the quality indexes and is included here as a base result for comparison. Green shading is used in this column to highlight the ideal results. The column No inject gives the measured quality indexes when the generators are inactive and allows to observe the characteristics of the voltage sag in different locations of the microgrid. These poor results are emphasized with red shading. For instance, in the PCC, the amplitude of the positive sequence voltage reduces from 1 p.u. to 0. 78 p.u. while the amplitude of the negative sequence voltage increases from 0 p.u. to 0.19 p.u. Another shading is used in the table to denote values close to the ideal (light green).
The column GCCS1 reports the results obtained when using the GCCS1 control scheme. As mentioned above, this scheme injects the maximum current via positive sequence only and, therefore, . The quality index is slightly lower than 1 (ideal value) due to some amount of active current is also injected via positive sequence according to the angle of the impedance seen from the output side of the generators. In any case, this control scheme produces a clear increase in the amplitude of the positive sequence voltage while the amplitude of the negative sequence voltage remains unchanged. As opposed to this, the GCCS2 control scheme injects the maximum current via negative sequence only, thus reducing the amplitude of the negative sequence voltage. The associated results to this scheme are listed in the column GCCS2. Note that, in this case, and then the amplitude of the positive sequence voltage remains unaltered. The results of the last grid-connected current source control scheme are reported in the column GCCS3. In this case, the maximum current is injected via positive and negative sequences, thus both increasing the amplitude of the positive sequence voltage and decreasing the amplitude of the negative sequence voltage. However, the total amount of power is divided between the two sequences and, thus, the results for positive sequence voltage are slightly lower than those for the GCCS1 scheme while for the negative sequence voltage they are slightly higher than those for the GCCS2 scheme. It is worth mentioning that the transient response of the three control schemes is fairly good for both normal-to-faulty and faulty-to-normal transitions.
The column IVS lists the results of the IVS control scheme. In this case, the microgrid is intentionally separated from the utility grid during the voltage sag and, therefore, the regulation of its internal voltage is nearly perfect. The amplitude of the positive sequence voltage is close to 1 while the amplitude of the negative sequence voltage is 0. These excellent results are obtained in different locations of the microgrid. However, the IVS scheme has serious drawbacks. First, the voltage at the PCC is not supported by the islanded microgrid because the switch
S is open in this case; see
Figure 1. Thus, the voltage measures associated to this point coincide with the non-injection case. Second, the transient response is slow, especially during the faulty-to-normal transition.
The results of the GCVS control scheme are reported in the column GCVS. The measures are quite similar to those obtained for GCCS3 scheme due to, in both cases, reactive current being injected via positive and negative sequences. In order to avoid the saturation of the PI controller shown in
Figure 5d, the reference voltage in the GCVS scheme
was set to 0.15 p.u; see
Table 2. With this value, most of the reactive current is injected via negative sequence, thus slightly improving the regulation of the negative sequence voltage compared to the GCCS3 case. The opposite is observed in
Table 4 for the positive sequence voltage, although the improvement with the GCCS3 scheme is small. As a final remark, the transient response of the GCVS scheme is slower than that of the GCCS3 scheme.
Table 5 shows the quality indexes measured for the control schemes considering the type II voltage sag. Compared to type I, this voltage sag is caused by a more severe fault resulting in a lower (higher) amplitude in the positive (negative) sequence component. Anyway, the control schemes operate correctly during the voltage sag providing the expected features. Note that the GCCS3 scheme has superior performance in relation to the other grid-connected control schemes, since it supports both sequences simultaneously. The IVS scheme has excellent results for the nodes within the microgrid, which is even more evident with the type II voltage sag due to the lower residual voltages. For instance, the amplitude of the positive sequence voltage increases from 0.39 p.u. to 0.96 p.u. in several locations of the microgrid. The performance of the GCVS scheme is similar to the GCCS3 performance. To achieve these results, the reference amplitude of the negative sequence voltage in the PCC has been changed from 0.15 p.u. (see
Table 2) to 0.25 p.u. due to the higher imbalance measured in type II voltage sag. This is a key parameter for this control scheme that impacts notably in the system performance. It must be generated in real time to adapt correctly to the changing conditions in microgrids. As a negative point, the transient response of the GCVS scheme is slow compared to the GCCS3 dynamics, as reported in
Table 5.
Table 6 shows the quality indexes measured for the type III voltage sag. As shown in
Table 3, this is a balanced sag without negative sequence voltage. Therefore, the control schemes that process negative sequence voltage are not considered in this test. Note that the GCCS1 control scheme improves the voltage amplitude by almost 0.05 p.u. in the PCC and in 0.1 p.u. in other locations within the microgrid. As expected, the IVS scheme has excellent voltage regulation in the internal nodes of the microgrid while, at the PCC, the voltage remains at the value of no injection (the switch
S is open in this case and the microgrid does not contribute to regulate the voltage at the PCC). As in the case of previous sags, the transient response of GCCS1 scheme is superior to those obtained with the IVS scheme.
It is clear that, taking into account the previous analysis, there is no control scheme with all its quality indexes above the indexes of the other schemes. However, for unbalanced sags (type I and type II) it is possible to note that the GCCS3 scheme provides the best support to the PCC voltage for both positive and negative sequences and, therefore, it is probably the best scheme from the point of view of the utility grid. For balanced sags (type III), the best scheme from the perspective of the utility grid is the GCCS1 scheme since the highest voltage amplitude in the PCC is obtained using this control. In addition, the IVS scheme provides an excellent voltage regulation in different locations within the microgrid, being the best choice from the point of view of the microgrid.
Section 5 will propose an alternative solution to cope with balanced and unbalanced voltage sags, which includes the use of a STATCOM in parallel with the microgrid. The solution will improve the performance of the control schemes highlighted in this discussion (the GCCS1, GCCS3 and IVS schemes).
4.3. Validation of the Analysis with Transient Simulation Results
This sub-section validates the previous analysis by transient simulation results. A test with the same sequence of events is used for all the control schemes. The test starts with the utility grid in normal condition at t = 0 s. The voltage sag appears at t = 0.1 s and is cleared at t = 0.3 s. The utility grid is in normal condition again in the last interval, from t = 0.3 s to 0.4 s. The control schemes are intentionally inactive during the interval t = 0.1–0.2 s. This period of inactivity is not necessary for the correct operation of the control schemes, but is included here to show the characteristics of the voltage sag when the generators are not injecting power to the utility grid. Therefore, the different characteristics of type I, II and III voltage sags are clearly observed in this inactive interval. For those control schemes operating in islanded mode during the interval t = 0.1–0.3 s, the non-priority loads of the micro-grid are disconnected during the voltage sag. Due to the design of the system, the capacity of the installation only guarantees the supply of the priority loads in islanded mode.
Figure 6,
Figure 7,
Figure 8,
Figure 9 and
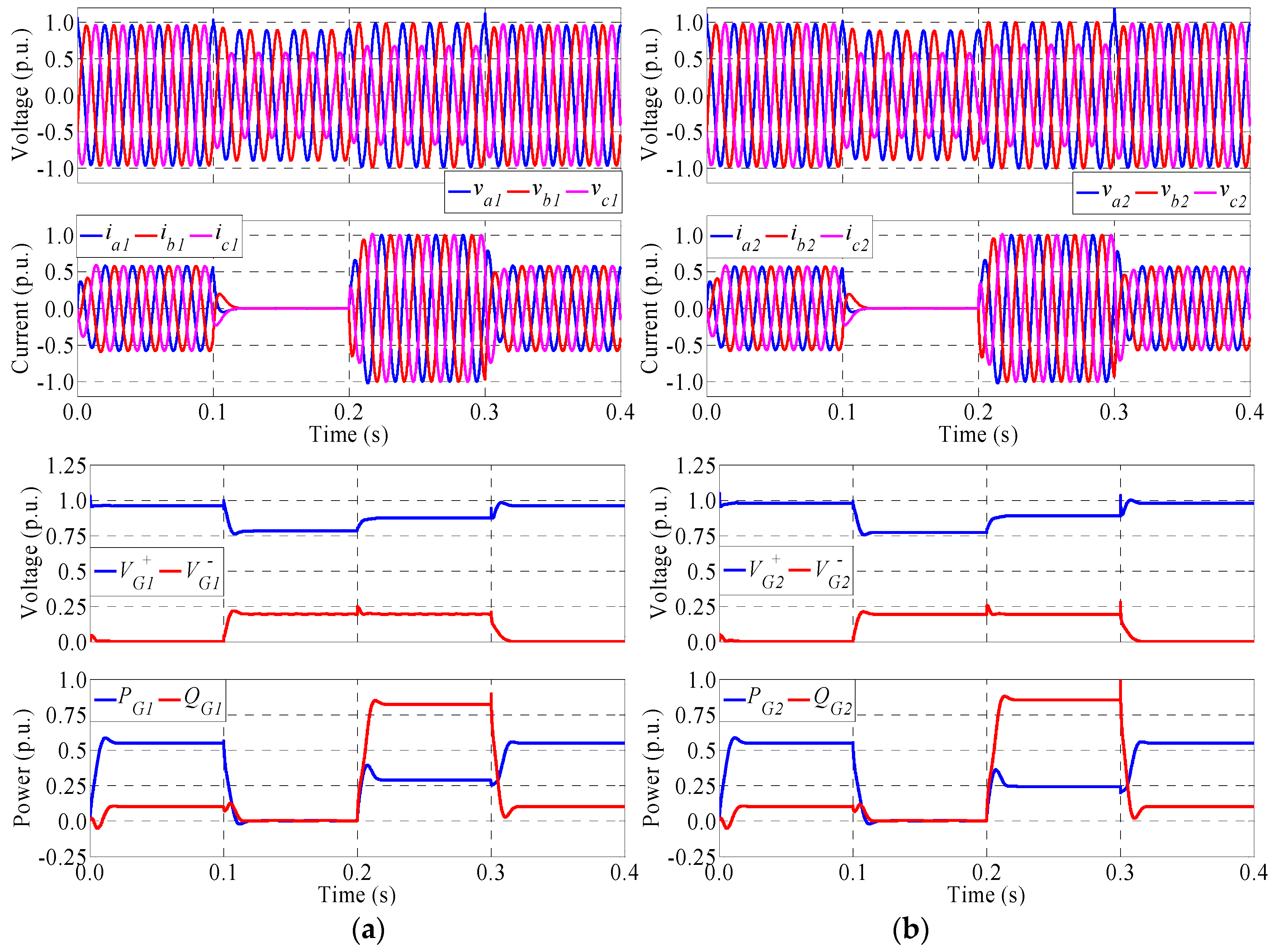
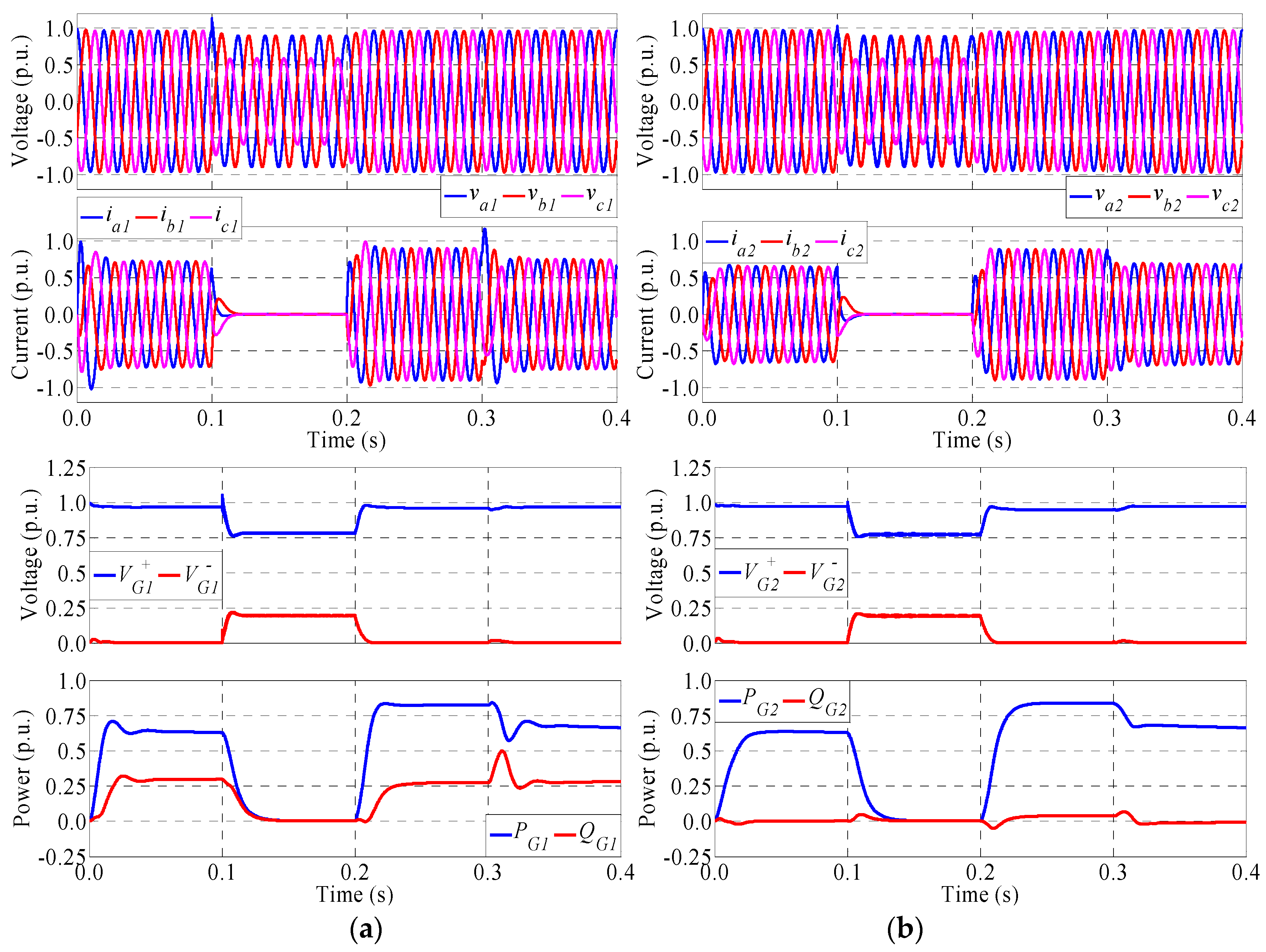
Figure 10 show the main waveforms of both generators for type I voltage sag. In particular,
Figure 6 shows the results obtained using the GCCS1 control scheme. As expected, this scheme increases the amplitude of the positive sequence voltage in the current injection interval, from
t = 0.2 s to 0.3 s, while keeping constant the amplitude of the negative sequence voltage. Therefore, the amplitude of all the phase voltages increase in this interval. In addition, generator 1 injects active and reactive power with a relation of 1 to 2.85 while generator 2 with relation 1 to 3.5, according to the impedance seen from the output side of each generator (see
Table 2). Note that this injection is carried out limiting the current to its maximum value.
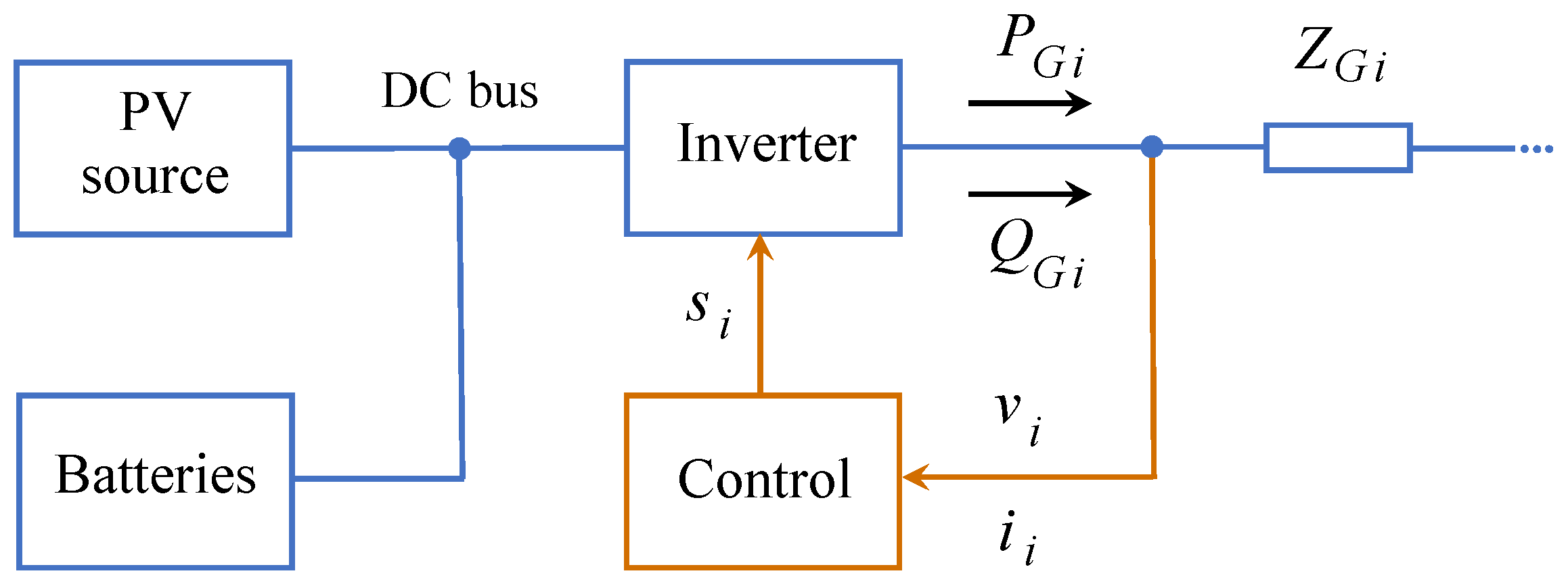
Figure 7 shows the waveforms of the generators using the GCCS2 control scheme. This control reduces the amplitude of the negative sequence voltage while maintaining the amplitude of the positive sequence voltage during the injection interval. The consequence is a reduction in the differences between the amplitudes of all the phase voltages. In other words, the amplitudes of the phase voltages tend to go together as much as possible. To this end, the higher voltage reduces its amplitude and the lower voltage increases it, as shown in the figure. In this case, the active and negative powers are lower compared to the values in the previous scheme, but again, the current is limited to its maximum value. It is worth mentioning that the active power is negative, meaning that this power is absorbed from the utility grid and delivered to the DC bus shown in
Figure 2.
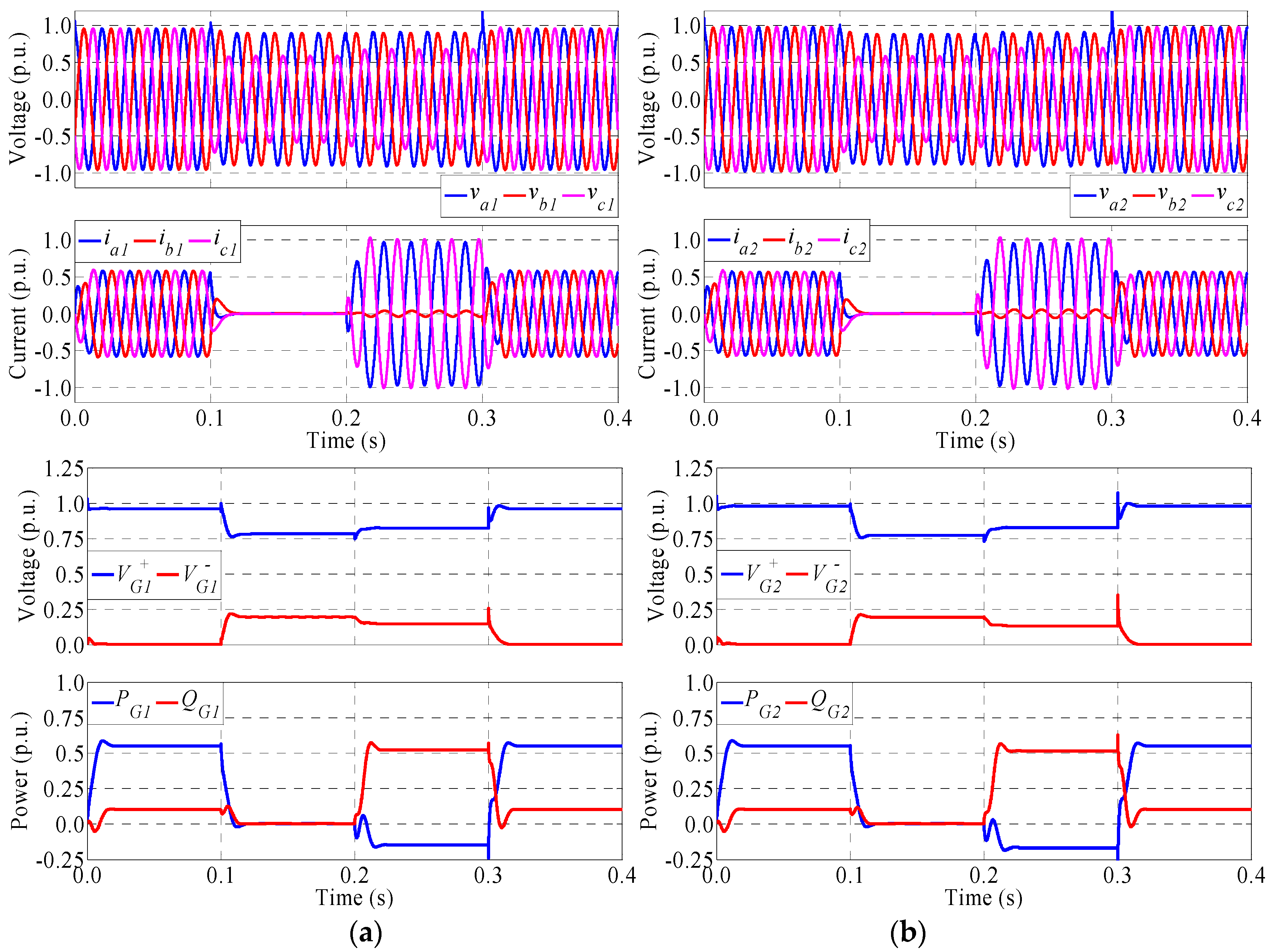
Figure 8 shows the main waveforms of the generators using the GCCS3 control scheme. As expected, this scheme simultaneously increases the amplitude of the positive sequence voltage and decreases the amplitude of the negative sequence voltage. The amplitude of the phase voltages both increase and tend to be together at the same time, thus improving the voltage support compared with previous control solutions. The active power is again negative and, hence, delivered to the DC bus of each generator. The injected current is limited to the maximum value, but in this case it is unbalanced. Note that the current injected by phase
b in both generators is very small. A common feature of the GCCS control schemes is a good transient response with fast recovery and small (or negligible) overshoots in voltage, current and power.
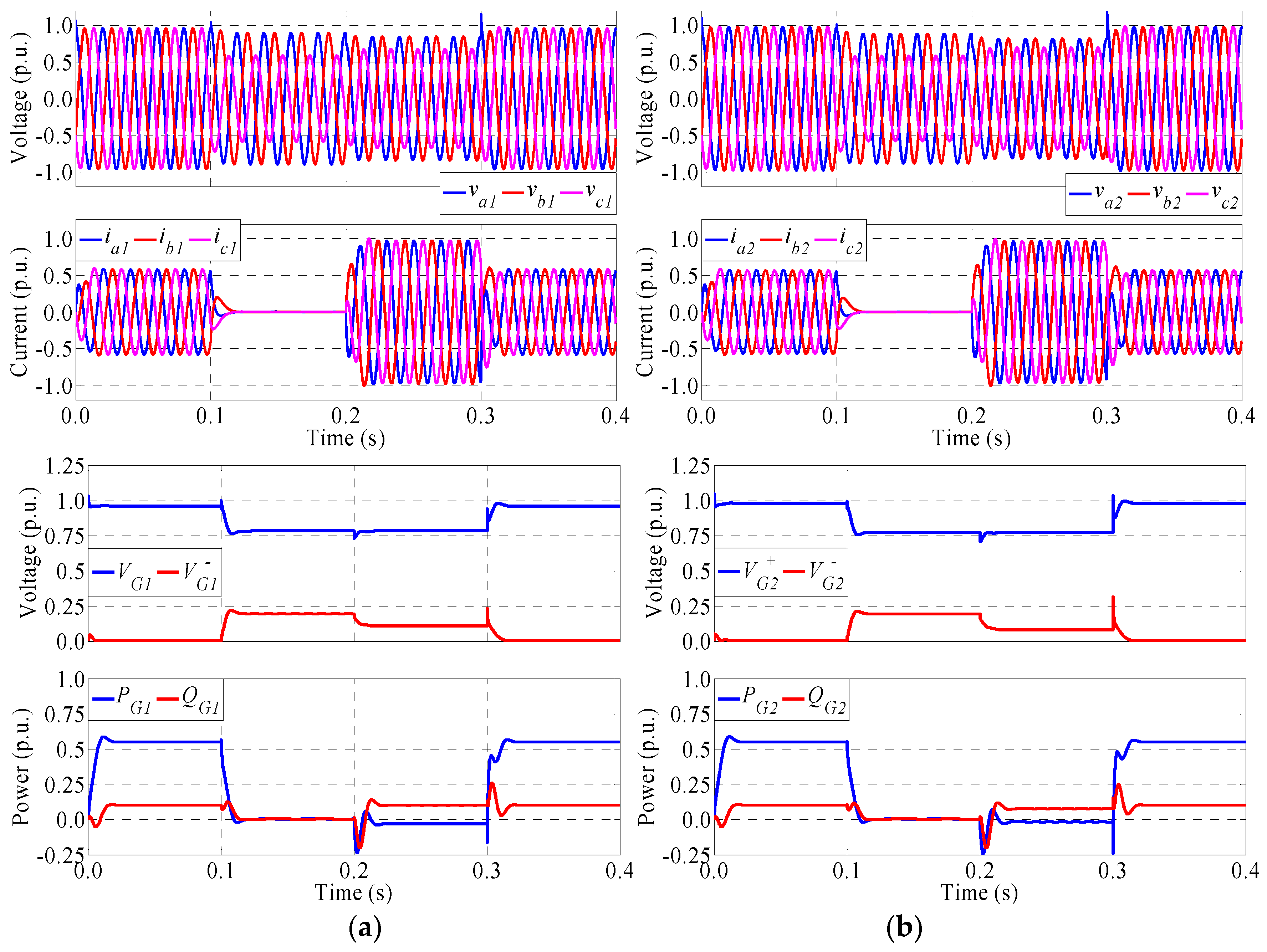
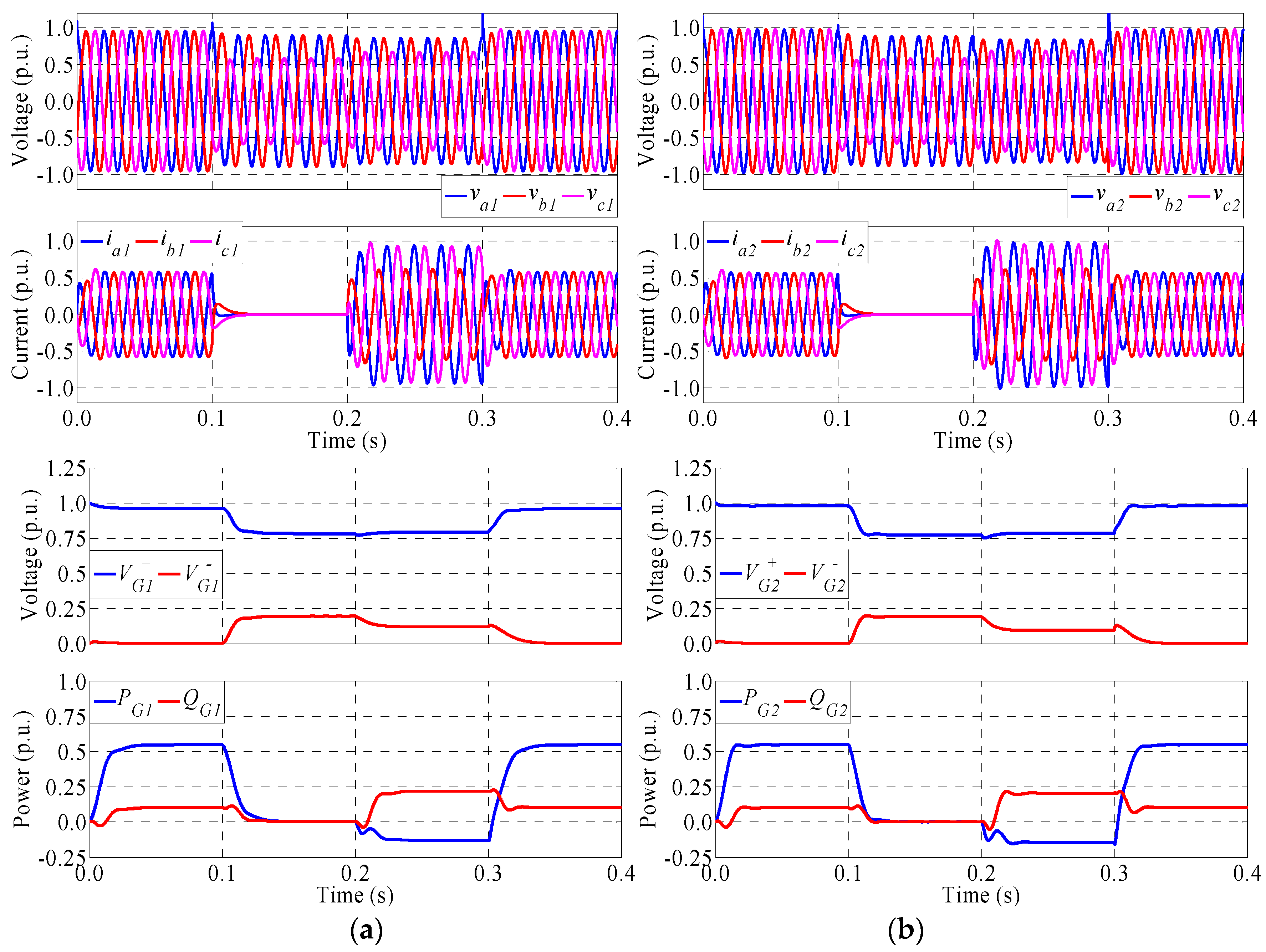
Figure 9 shows the waveforms of the generators using the IVS control scheme. During the injection interval (from
t = 0.2 s to 0.3 s), the voltage regulation in both generators is very good. The positive sequence is nearly recovered to the pre-sag value and the negative sequence is completely removed. This is possible because the microgrid operates in islanded mode in this interval and the generators have enough energy to both regulate the internal voltages and supply the loads (due to the microgrid does not inject power to the utility grid). As negative points, the generators poorly share the reactive power, the transient response is slow and currents and powers have overshoots during transitions, especially in generator 1.
Finally,
Figure 10 shows the waveforms of the generators using the GCVS control scheme. In this case, the waveforms are quite similar to those obtained with the GCCS3 scheme; see
Figure 8. Both schemes support the voltage by simultaneously increasing the positive sequence and decreasing the negative sequence. The generators in both schemes absorb active power and inject reactive power with slightly different values. The main differences observed in
Figure 8 and
Figure 10 are: (1) the amplitude of the phase voltages are slightly higher in the GCCS3 scheme; (2) the current unbalance is lower in the GCVS scheme; and (3) the transient response is faster in GCCS3 scheme.
Tests similar to those reported in
Figure 6,
Figure 7,
Figure 8,
Figure 9 and
Figure 10 were carried out for type II and III voltage sags. A selection of the results is shown in
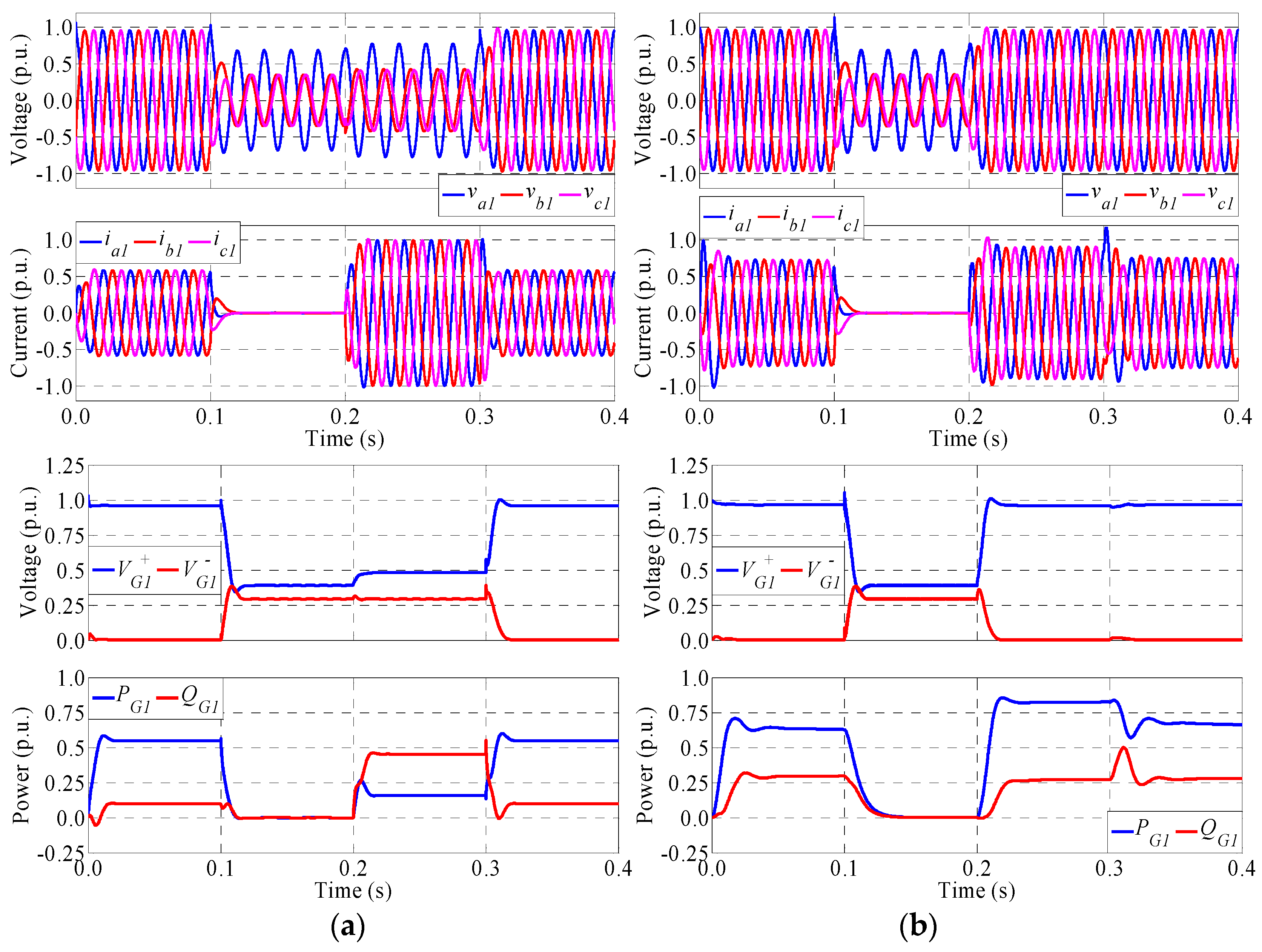
Figure 11, which compares the waveforms obtained in generator 1 using the GCCS1 and IVS control schemes for type II voltage sag. In addition,
Figure 12 shows the same waveforms using the selected control schemes for type III voltage sag. Note that the GCCS1 scheme is preferred in this comparison instead of the GCCS3 scheme (which provides even higher performance for type II voltage sags) since this last scheme cannot be used for type III voltage sag.
Focusing on the injection interval (from
t = 0.2 s to 0.3 s), it is clear from
Figure 11 that the IVS control scheme provides better voltage regulation on the output side of generator 1 compared to the GCCS1 scheme. The improvement in voltage regulation is remarkable since the amplitude of negative sequence voltage is high in the type II voltage sag. Although this property is maintained for the type III voltage sag (see
Figure 12), the improvement is not as pronounced due to the absence of negative sequence and the higher values of the residual phase voltages. Another point to take into account is that the microgrid is intentionally separated from the utility grid when using the IVS control scheme, which makes the voltage regulation in the PCC better using the GCCS1 scheme; see the previous results of
Table 4,
Table 5 and
Table 6. Finally, it should be noted that the impact of the characteristics of the voltage sags on the transient response of the system is small, as shown in
Table 4,
Table 5 and
Table 6 and in the results of
Figure 11 and
Figure 12. It is clear in these figures that the GCCS1 control scheme presents a much higher performance in terms of transient response compared to the IVS control. In particular, the transient response is faster and exhibits lower overshoots in voltage, current and power.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}