1. Introduction
Demand response (DR) is the change of the electric demand in response to the grid. Conventionally, DR is considered as a peak-load decreasing strategy, and is used for off-line planning and day-ahead scheduling. By offering customers time-varying prices, or financial incentives, the customers reduce peak load demand, so that the grid reliability is enhanced. Not only customers, but also load-serving entities and system operators can benefit from DR. By solving the day-ahead scheduling problem with DR, system operators dispatch the DR and other resources properly, minimizing the total operation cost and at the same time meeting the system equations. The day-ahead scheduling problem with DR has been investigated in many research works. For example, the scheduling problems with price-elastic DR are investigated in [
1,
2,
3], and some other studies incorporate DR with renewable energies in scheduling problems [
4,
5].
In recent years, based on advanced metering technologies, DR is able to provide real-time ancillary services, such as primary frequency control. Since the system frequency reflects the real-time balance between the electric power supply and the demand, DR can support this balance through managing the demand side resources. For example, when the frequency decreases, some electrical appliances are switched off or reduce their load demand temporarily to help the frequency restore to the nominal value. It is demonstrated that DR can perform like thermal generators in the frequency control. Unlike conventional under-frequency load shedding (UFLS), the electrical appliances that participate in the frequency control are usually non-essential loads. These loads can provide immediate response without causing any inconvenience to residents. During recent years, increasing attention have been paid to DR in the frequency control. A variety of control strategies, e.g., decentralized control strategies [
6,
7], centralized control strategies [
8,
9], hybrid hierarchical control strategies [
10], proportional-integral (PI) control method [
11,
12], linear quadratic regulator method [
13],
H∞ control method [
14], etc., have been developed. Some researches incorporate DR with other resources in the frequency control, e.g., wind generators [
15], storages [
16], etc. Some other researches apply DR to real power systems, to test its performance in the frequency control [
17,
18].
However, very few studies take DR as a frequency control resource in the scheduling problem. Although [
19] proposes a method that incorporates DR as part of the spinning reserve in the scheduling problem, system reserves are usually activated within minutes or more. The primary frequency control, which should act in a very short time to cope with transient disturbances, is not discussed in [
19].
Moreover, DR for the load shifting (load-shifting DR for short) and DR for the frequency control (frequency-control DR for short) are investigated separately, and few studies incorporate the two kinds of DR services together. On the one hand, the system frequency response characteristics are usually dependent on the scheduling results; on the other hand, some DR resources that participate in frequency control can also provide load decreasing or shifting services, and it is necessary to develop a method to dispatch the different kinds of DR resources properly.
In view of the above, this paper proposes a scheduling method considering DR as a frequency control resource. DR can provide not only the load-shifting, but also primary frequency control. With the proposed method, the DR resources for both load-shifting and frequency-control can be properly dispatched. The remainder of this paper is organized as follows: In
Section 2, the day-ahead scheduling problem with both frequency-control DR and load-shifting DR is formulated. In
Section 3, the frequency limit equation considering DR is modeled. Case studies are provided in
Section 4. Finally, conclusions are summarized in
Section 5.
2. Day-Ahead Scheduling with Flexible Demand Response (DR) Resources
DR is a flexible resource that can support the stability of the power system in different time scales. For a long time scale, DR can provide peak clipping or load-shifting at peak hours. For a short time scale, DR can support the primary frequency control. In the scheduling problem, we consider these two different kinds of services from DR.
The DR programs have been classified into two major categories, namely, incentive-based DR and price-based DR. Incentive-based DR refers to customers receiving payments or preferential prices for offering DR, whereas price-based DR allows customers to voluntarily adjust their demand based on varying electricity price. In our model, both price-based DR and the incentive-based DR are considered. The load-shifting DR is based on the time-varying price, whereas the frequency-control DR is based on the financial incentive.
The price-based DR for load-shifting has been investigated in many research works [
1,
2,
3,
20]. The time-varying electricity price makes the consumers shift their demand from the peak hours to other durations. Due to the page limit, this paper does not discuss the price-based load-shifting DR in detail. In this paper, the modeling of the load-shifting DR takes the similar approach as [
3].
The incentive-based DR for the frequency-control is managed by the aggregator through a technical unit named as virtual power plant (VPP). The contracts between the aggregators and the electric consumers will allow the aggregators to manage the electricity consumption of the DR appliances. In addition, the consumer will get some payments in return. Since these payments will add costs to the system operators, the cost should be considered in the scheduling. In this paper, the DR cost for frequency control is based on the capacity of the dispatched frequency-control DR.
The goal of the scheduling problem is to determine the schedule of generators and the DR resources, so that the total social welfare is maximized [
1,
2,
3,
20]. Considering DR in the load-shifting and frequency control, the objective function can be formulated as below:
The first term and the second term in Equation (1) are, respectively, the consumer gross surplus and the system operation cost [
1,
2,
3,
20]. The consumer gross surplus is only related to price-based DR (which is for load shifting). The system operation cost mainly includes two parts: the generation cost and the DR cost. The generation cost consists of fuel cost, start-up cost and shut-down cost, and the DR cost is what the system operator pays the aggregators for offering frequency-control DR.
The optimization problem is subject to the following equations:
(1) Generation Operation Equations
The generation operation equations are listed in (2)–(6). Equations (2)–(4) are, respectively, the power balance equation, generating unit limit equation, and ramp rate limit equation. Equations (5) and (6) are the state transition equations, which define the relationship between the binary start-up variable xi,h, binary shutdown variable yi,h, and binary commitment variable ui,h.
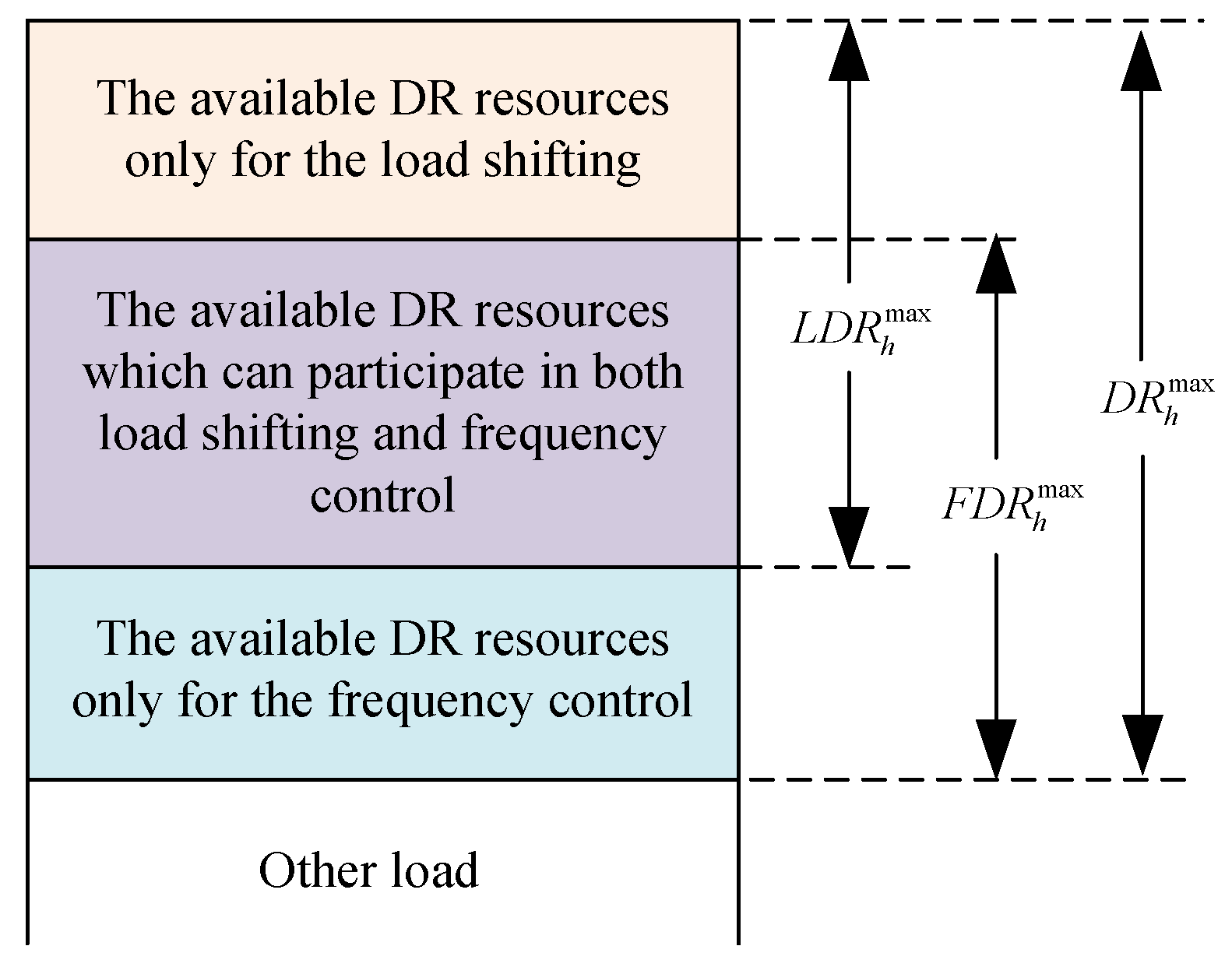
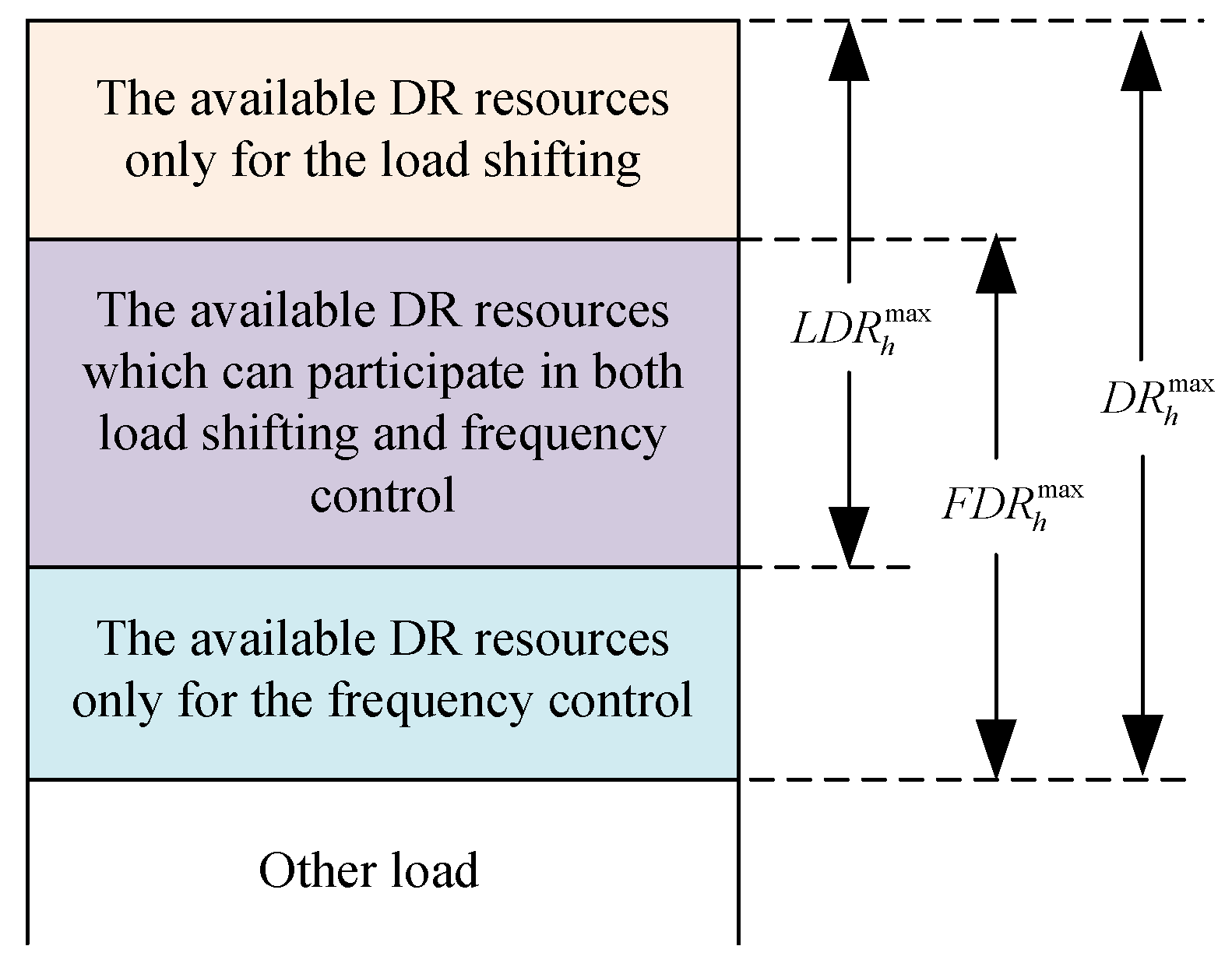
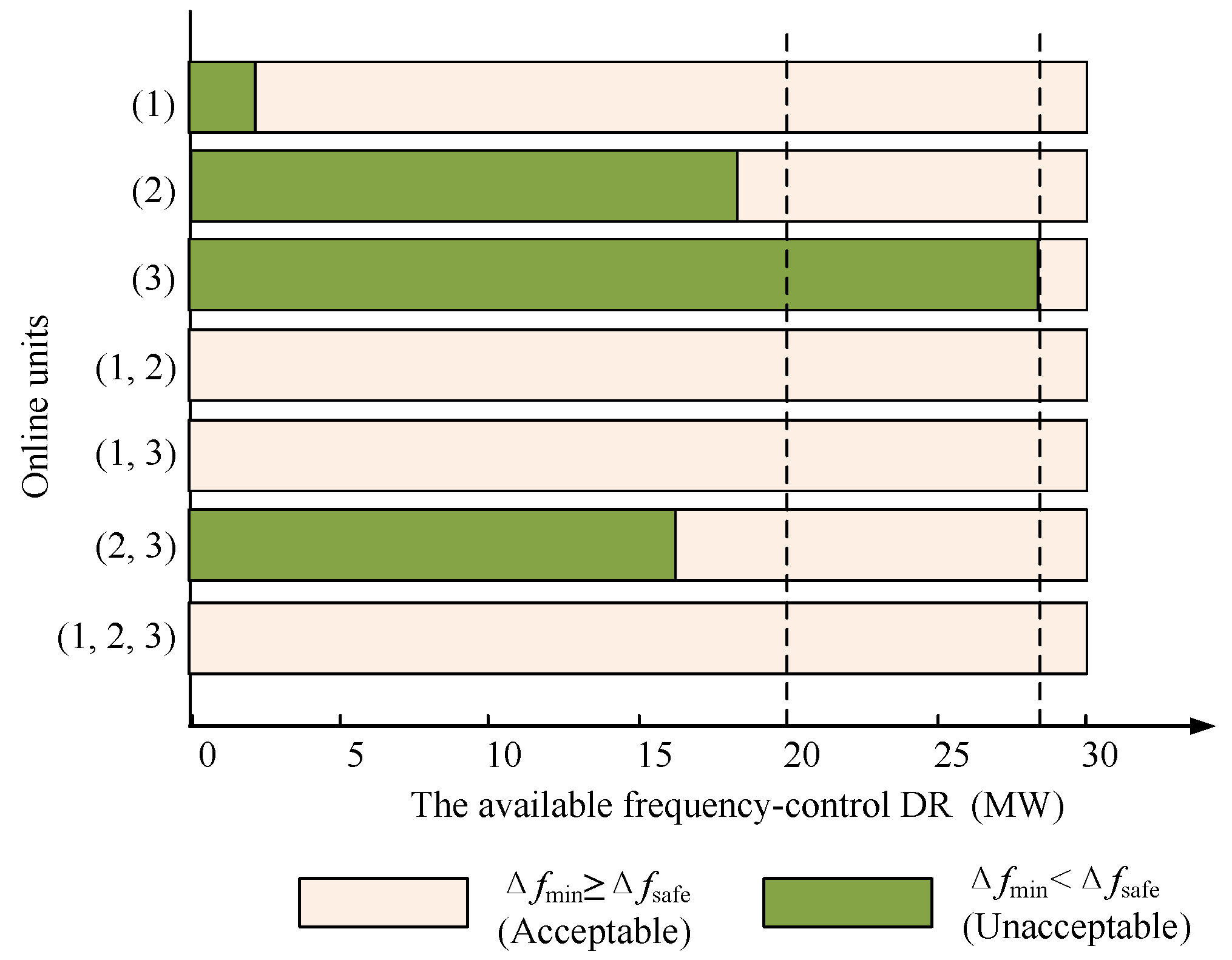
The DR equations are listed in Equations (7)–(10), Equations (7) and (8) define the maximum limits of the dispatched DR for load-shifting and DR for frequency control, respectively. Equation (9) defines the limits of the total amount of dispatched DR for load-shifting and frequency control. Note that frequency-control DR and load-shifting DR are not independent from each other. Some of the DR resources that participate in the load-shifting can at the same time support frequency control. The relationship between the maximum available DR resources and the load-shifting and frequency control is shown in
Figure 1.
Equation (10) imposes a limit to the total allowable load change over the scheduling period 3. The curtailed load will be fully shifted to other periods if Emax is set at 0.
(3) System Frequency Equation
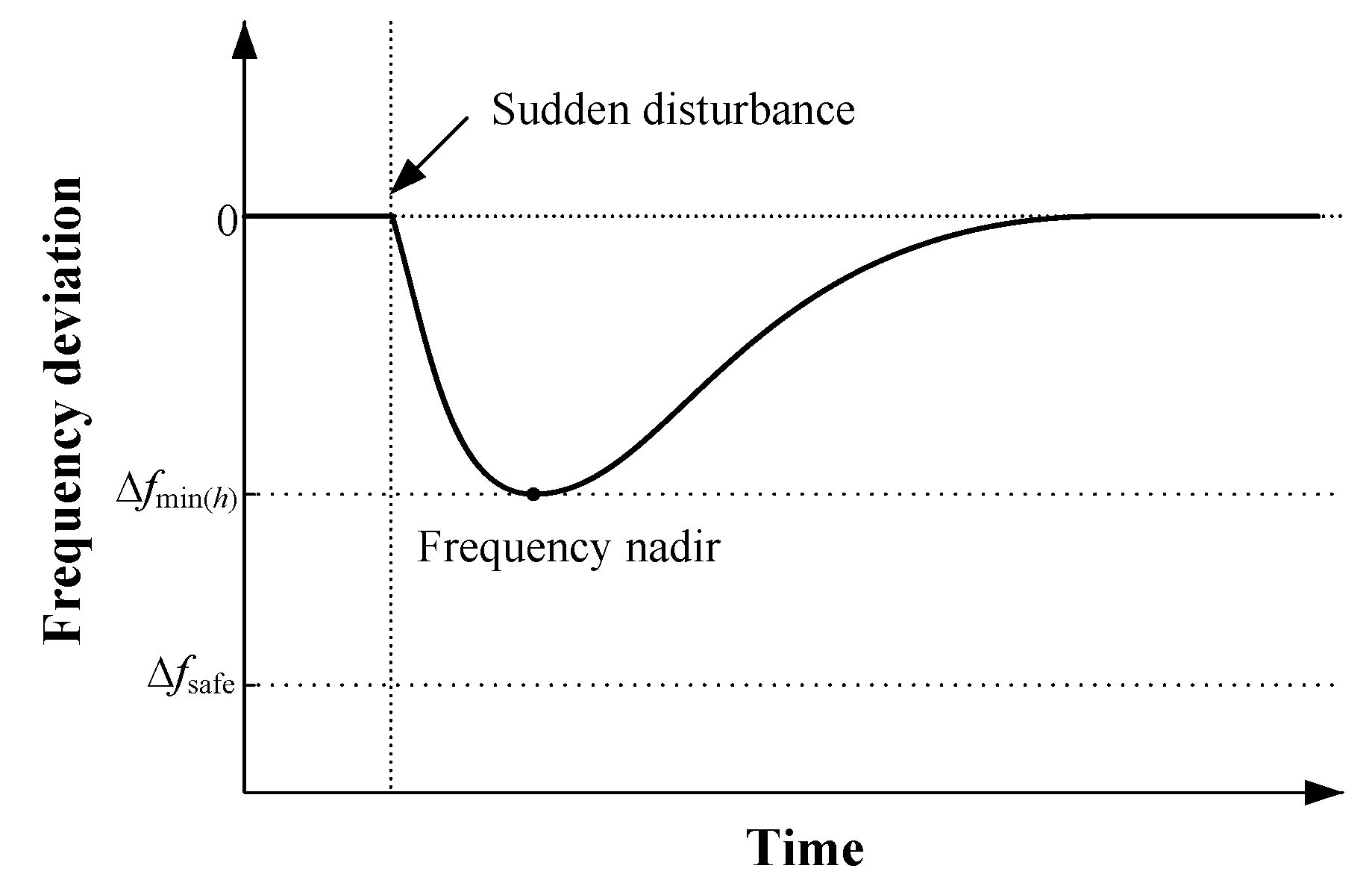
System frequency reflects the balance between the electric power supply and consumption. When there is imbalance between electric supply and demand, system frequency will increase or decrease. Generally, system frequency control can be separated into primary, secondary, and tertiary control. Primary control is proportional feedback control that operated by the speed governors of the generation units. It takes the first step to intercept the load frequency fluctuation. Secondary control is performed by some selected generators that adjust the load frequency to the nominal value. Tertiary control is activated manually to release the secondary control reserves. Among primary, secondary, and tertiary control, the primary control is to compensate large and sudden disturbances. In this paper, we focus on the primary frequency control by DR.
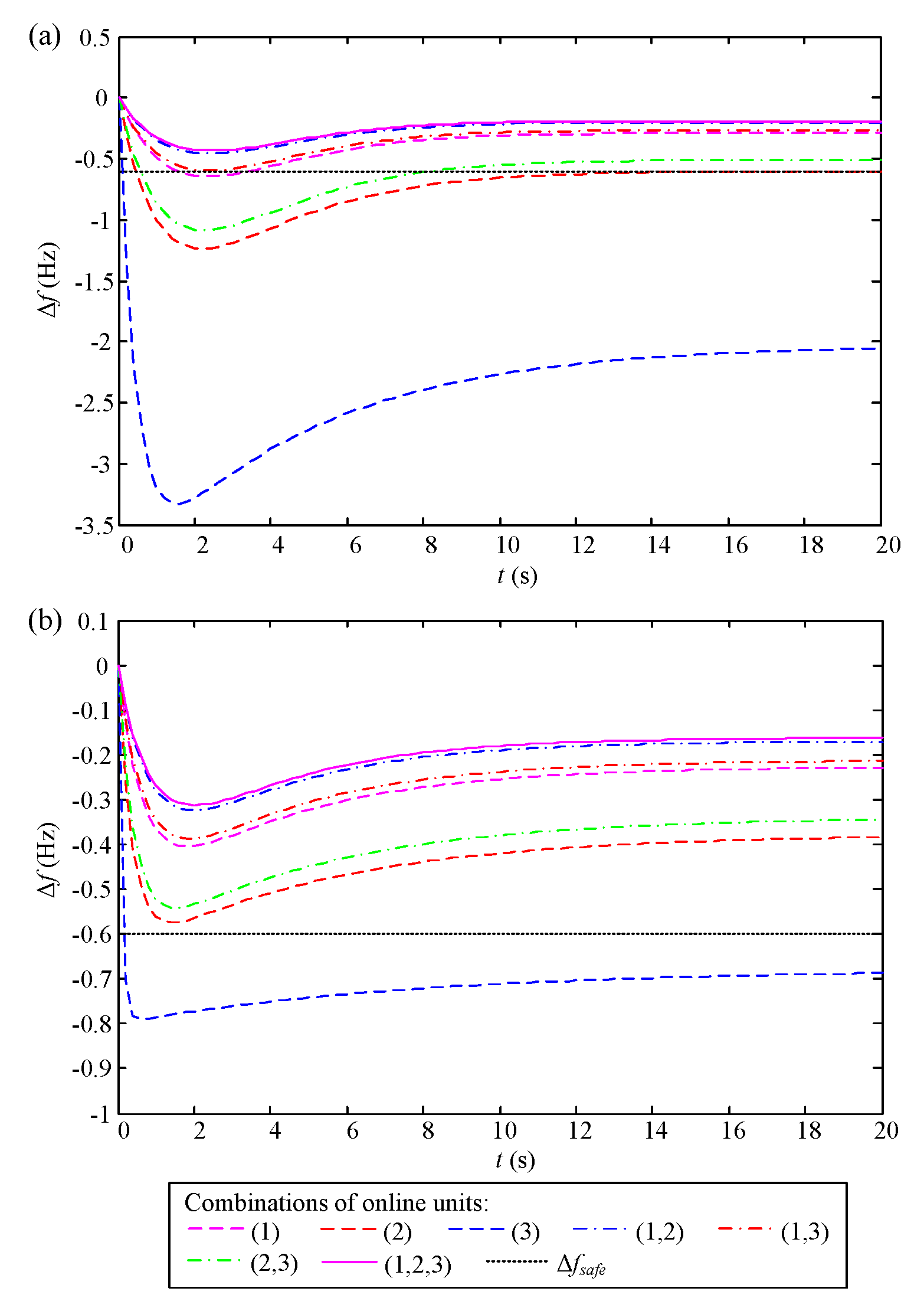
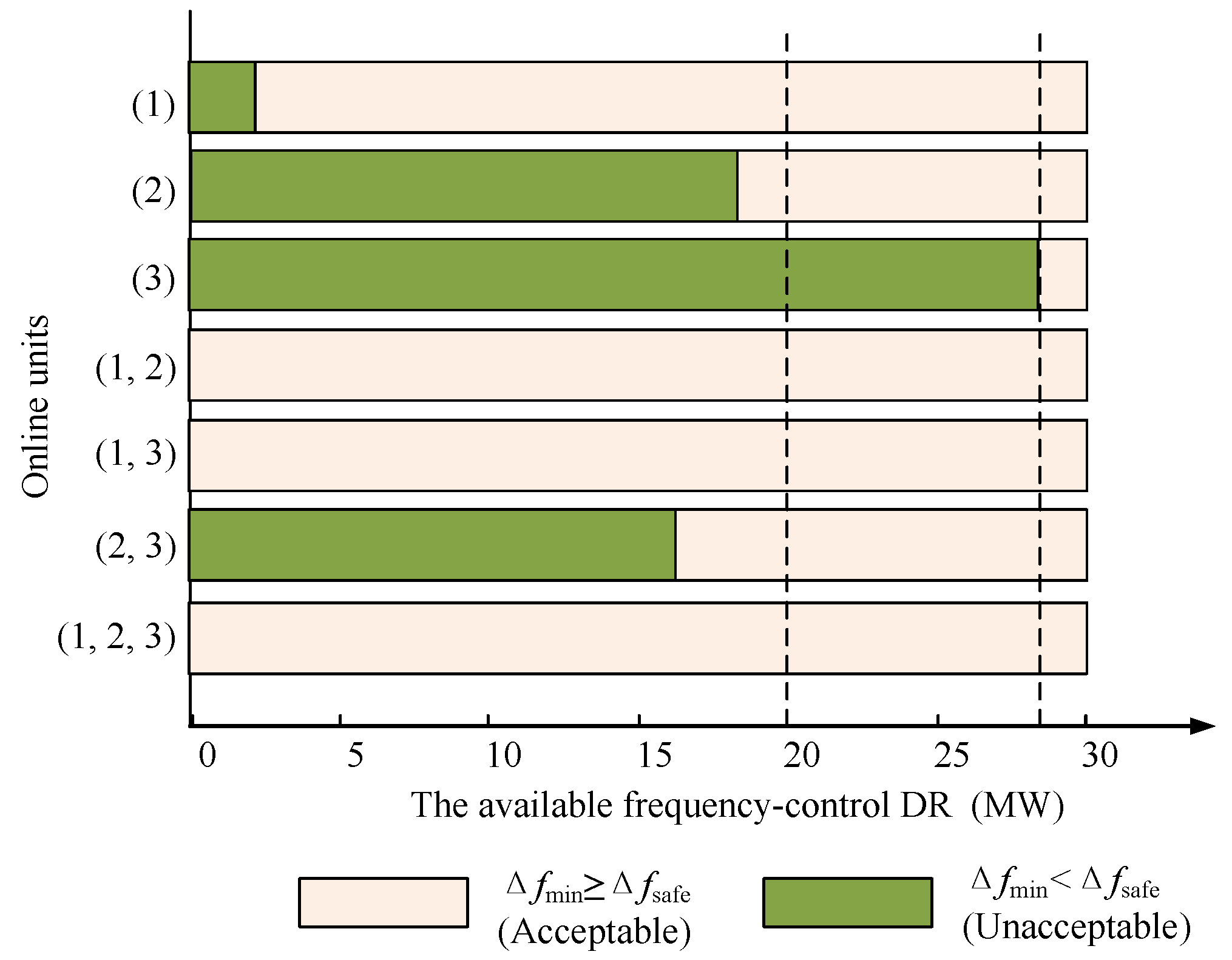
In our model, the task of the primary frequency control is constraining the frequency in the expected normal range when a sudden disturbance occurs. If the frequency drops too low (e.g., 0.6Hz lower than the nominal frequency), UFLS may operate to avoid system collapse. However, UFLS will cause power failure to the power consumers. To avoid trigging UFLS, it is necessary to consider the primary frequency control in the scheduling problem. Usually, the primary frequency control is incorporated in the scheduling problem by defining a reserve equation [
21,
22]. Though easily modeled, the primary reserve only reflects the steady-state frequency deviation in about 5 to 10 s. However, the maximum system frequency drop cannot be reflected. In many cases, the under frequency relay triggers instantly when the system frequency is detected below one threshold. Therefore, in order to avoid trigging UFLS, it is necessary to consider the frequency limit equation instead of the reserve equation.
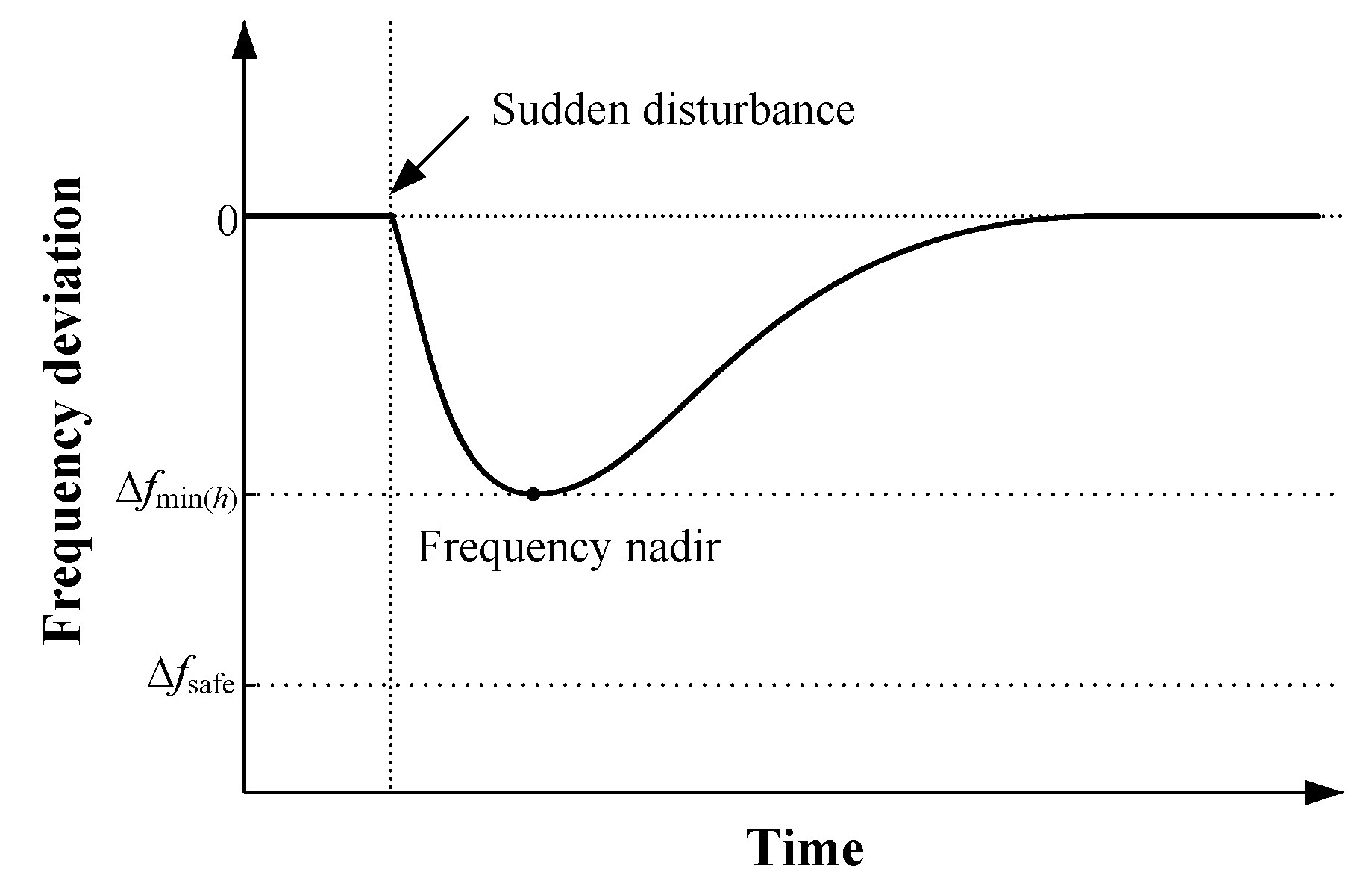
To model the frequency limit equation, here we define a safe frequency level Δ
fsafe, shown in
Figure 2. For a supposed contingency (e.g., 10% generation loss or the frailer of the largest generator), the frequency nadir should be above Δ
fsafe [
8]. The system frequency limit equation is defined in Equation (11).
However, Equation (11) is not easy to calculate due to the non-linear nature of the system frequency response characteristic. The details about calculating the frequency limit equation are presented in the next section.
3. Frequency Limit Equation Modeling
The purpose of this section is to find a way of modeling the frequency limit equation, and transform the frequency limit equation into an inequality relationship between ui,h and FDRh.
3.1. Calculation of the Frequency Nadir
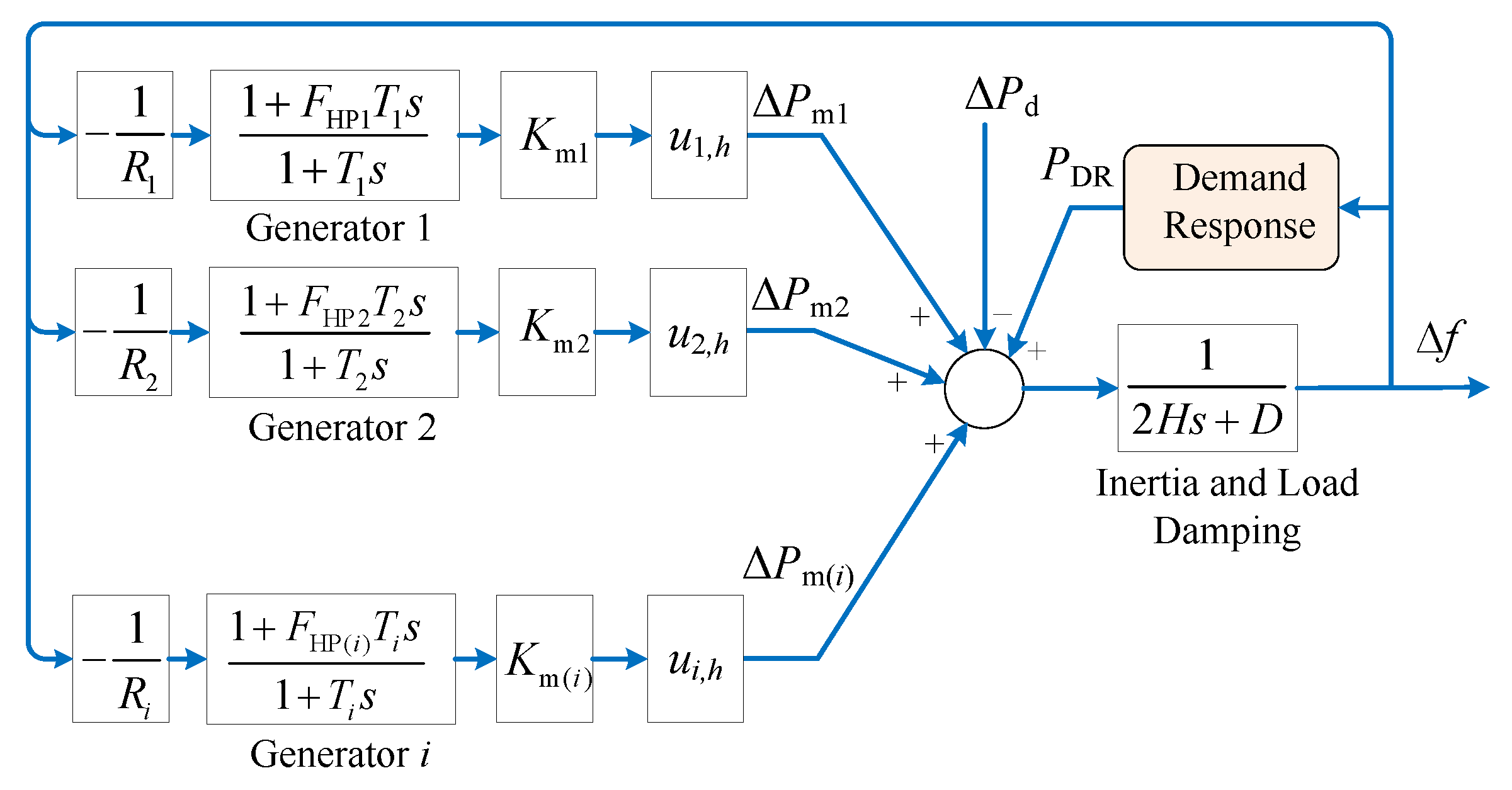
The frequency response model is an effective tool to study the dynamic characteristics of the frequency in response to the time-varying supply or demand.
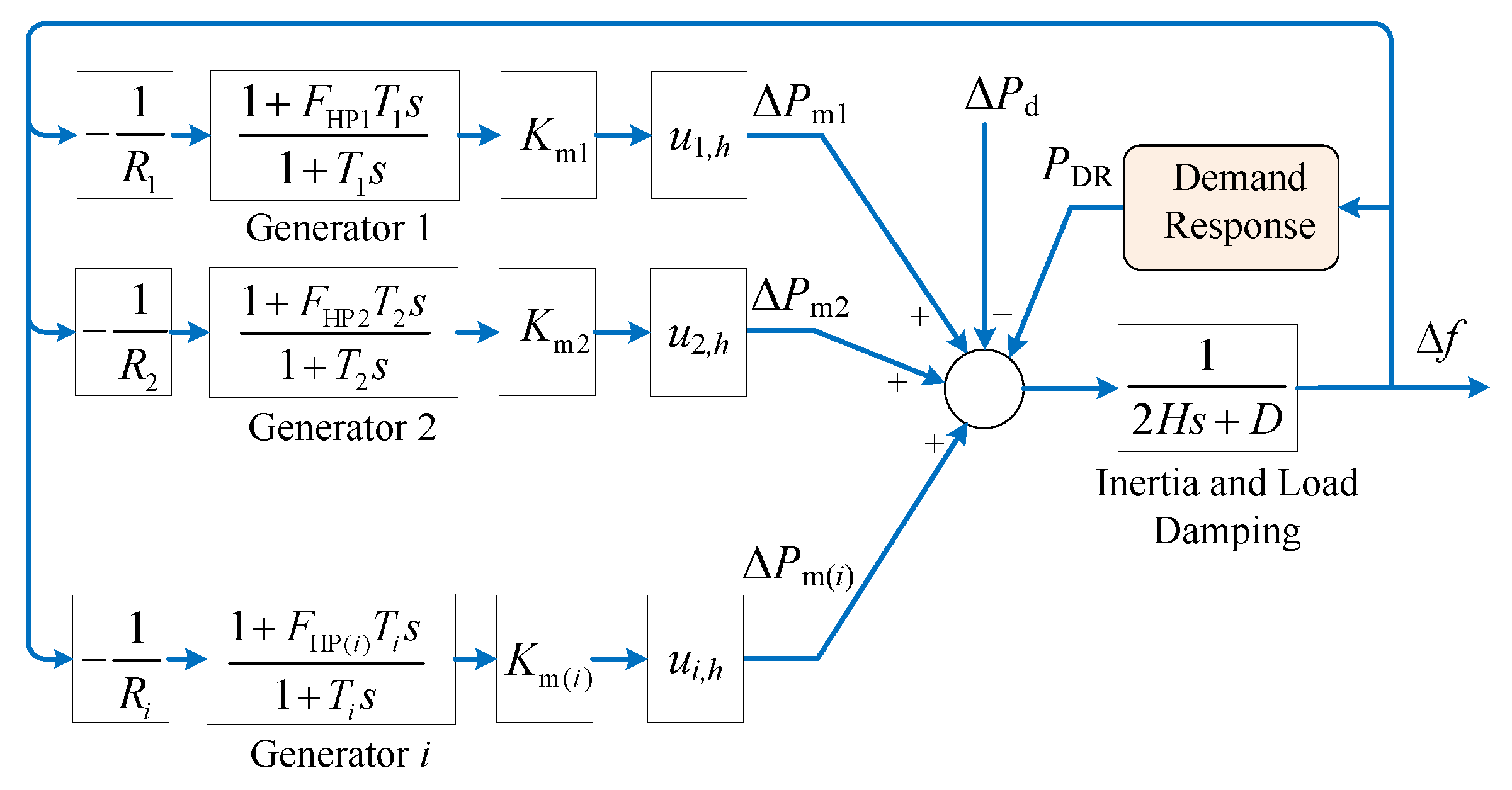
Figure 3 shows a low order frequency response model with multiple generator units. Note that
ui,h is the unit commitment (UC) parameter, which was introduced in
Section 2. Since this paper focuses on the primary frequency control of the scheduling problem, in
Figure 3 each generation unit is equipped with a governor system. Because the response time of secondary frequency control could be a minute or two (much longer than the response time of primary control), the secondary frequency control is not involved in
Figure 3.
According to
Figure 3, the function of ∆
f can be derived as following:
Sudden disturbances usually take the form of a step function:
where
Pstep denotes the disturbance magnitude.
The effect of DR in the frequency control has been studied in many earlier researches. To provide primary frequency control, the manipulated responsive DR for the frequency control should be based on the frequency deviation [
10,
23]. For a negative frequency deviation ∆
f < 0, the amount manipulated DR is determined by:
where
kDR is a pre-defined parameter, which is calculated as:
where ∆
fprm is the frequency deviation at which all the primary reserves are delivered and
FDRh is the available frequency-control DR, which was introduced in
Section 2.
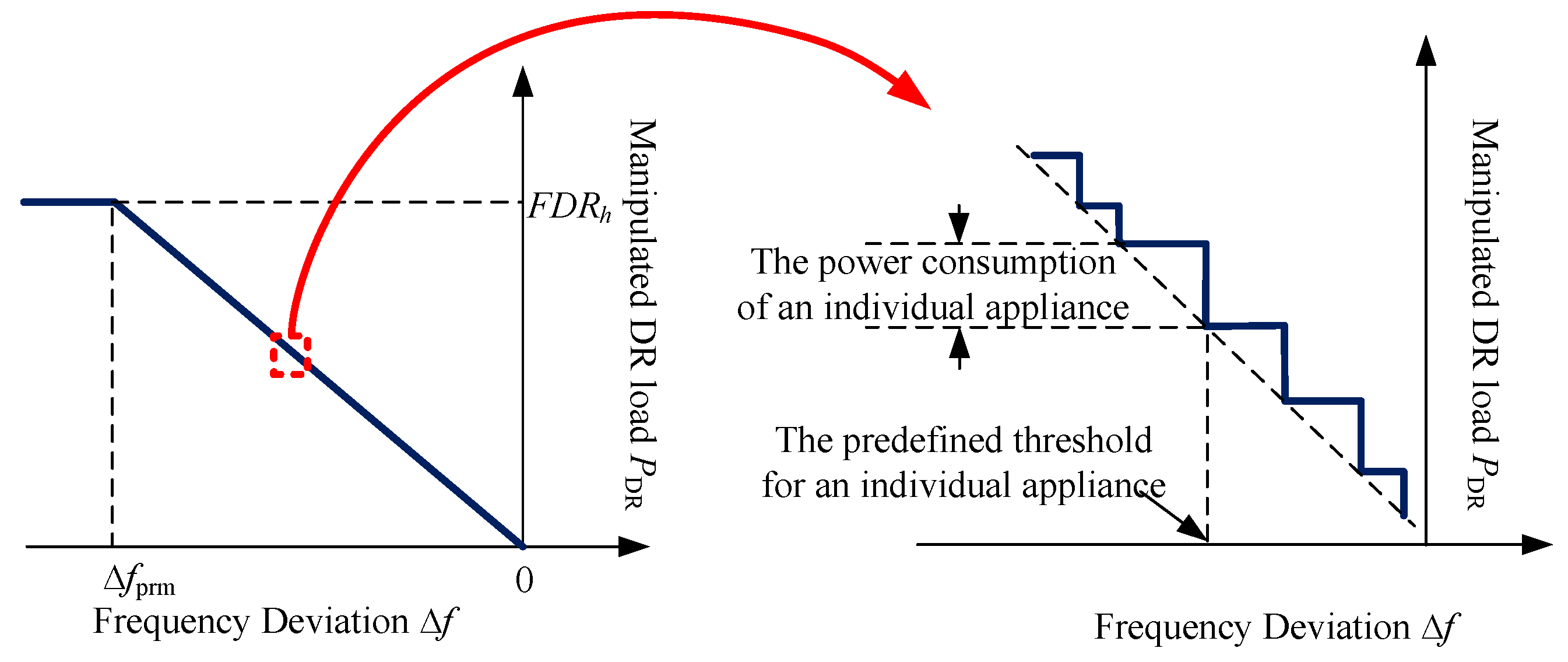
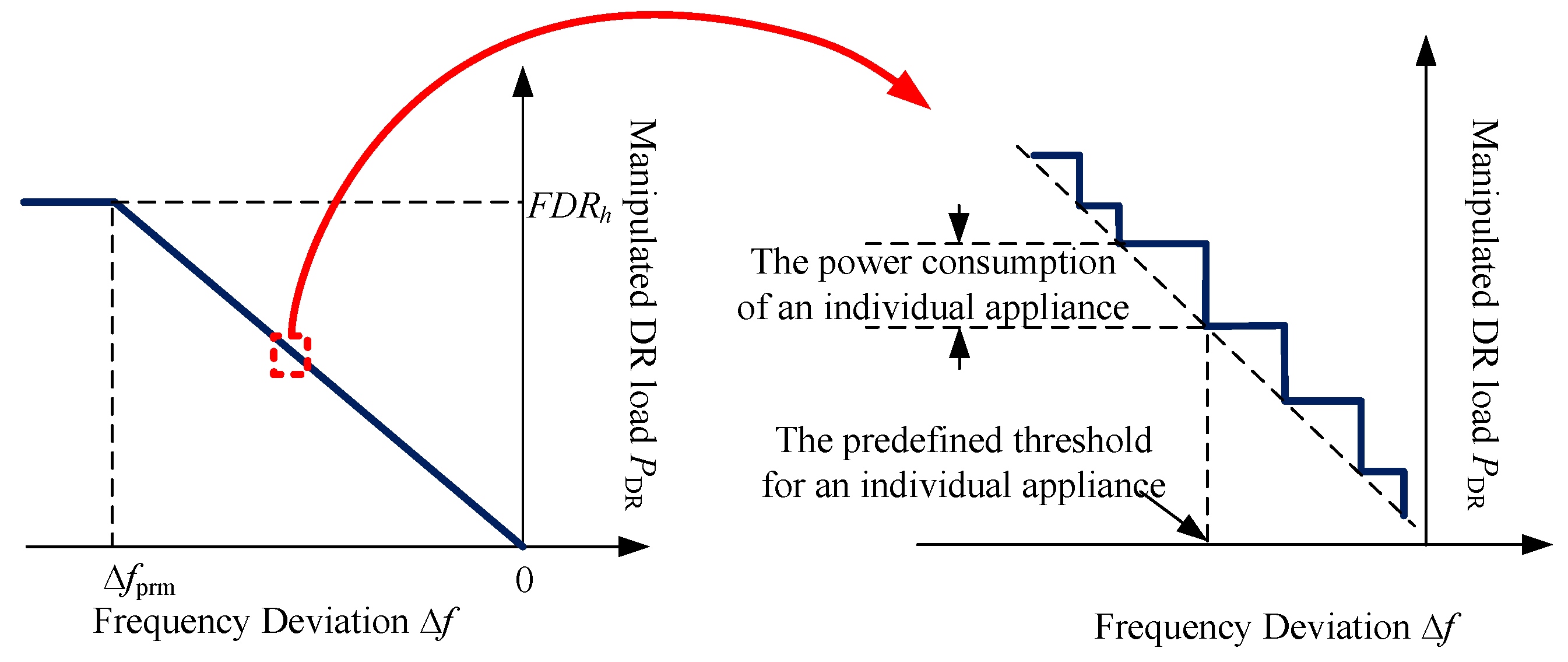
Note that the DR may not give a continuous response like Equation (14) because most of the appliances that participate in DR are ON/OFF appliances (i.e., refrigerators, freezers, and water heaters without frequency variation speed control) that can only provide a discrete response. To implement DR with these appliances, a number of frequency thresholds are usually set in advance. If one controller detects ∆
f below a predefined threshold ∆
fth, the controller outputs a switching signal and switches the appliance off. However, we can define different ∆
fth for different appliances properly so that their aggregated frequency response characteristic is similar to Equation (14), as can be seen in
Figure 4. The overall control framework can be based on a hierarchical framework [
10] that combines the centralized and decentralized control framework together. In such a control framework, individual controllers measure the system frequency and compute control signals by themselves; meanwhile, the control parameters are given by the control centre. The response delay is very small and can be neglected [
10]. More details of this DR control strategy can refer [
10].
To ensure a large enough frequency regulation range, the parameter ∆
fprm should be below or at least equal to the safe frequency level ∆
fsafe. If we do not consider the situation that ∆
f < ∆
fprm,
PDR(
s) can be expressed as following:
Equation (16) neglects the dynamics of DR. If there exists a communication delay of DR, a pure delay
is needed to be considered in Equation (16):
. However, in a hierarchical control framework such as [
10], the response delay of DR is so small that can be neglected.
Substituting Equations (13) and (16) in Equation (12) yields
It can be seen from (17) that the introduction of DR is equivalent to adding the load-damping factor
D of the frequency response model. By assuming an identical
TE instead of
Ti for all the generators [
24], Equation (17) can be simplified as follows
where
Note that the parameters
KR,
KF are functions of
ui,h. And the parameter
H is also a function of
ui,h.
H can be calculated by:
By computing the inverse Laplace transform of Equation (18), the time domain equation can be obtained as follows
where
At the time of the frequency nadir Δ
fmin(h), the slope of the frequency deviation is zero. By solving dΔ
f(
t)/d
t = 0, the time of the frequency nadir
tz can be obtained as follows
Substituting Equation (27) in (22), the frequency nadir can be obtained:
3.2. Piece Wise Linearization of the Frequency Limit Equation
From Equation (15) and Equations (19)–(28), we can see that Δfmin(h) is a function of ui,h and FDRh. However, the expression of Δfmin(h) is nonlinear and is too complicated to be solved by traditional methods, e.g., mixed integer linear programming. It is necessary to linearize the function of Δfmin(h).
Since TE and D are predefined parameters for Equation (18), and is not directly affected by the parameters ui,t and FDRh. Only the four variables H, kDR, KF, KR are considered in the linearization of the function Δfmin(h).
Suppose that
H,
kDR,
KF,
KR have the following maximum and minimum limits:
For linearization, the domains of H, kDR, KF, KR are divided equally into iim, jjm, kkm, llm pieces, respectively. Therefore, the definition domain has totally iim×jjm×kkm×llm pieces.
Suppose that
H,
kDR,
KF,
KR are in the range of
ii,
jj,
kk,
ll pieces, which is denoted as (
ii,
jj,
kk,
ll), that is:
Δ
fmin(h) can be estimated by a linear function:
where
AA(ii, jj, kk, ll),
BB(ii, jj, kk, ll),
CC(ii, jj, kk, ll),
DD(ii, jj, kk, ll),
EE(ii, jj, kk, ll) are parameters that are determined by least squares estimation. By introducing a large enough
ε, the conditions from Equations (33)–(36) and Equation (37) can be transformed to the following equivalent linear relations:
where
v(ii, jj, kk, ll) is a binary variable indicating the piece (
ii,
jj,
kk,
ll) if
v(ii, jj, kk, ll) is 1. Since the Equations (38)–(47) are for the piece (
ii,
jj,
kk,
ll), the system frequency equation can be expressed by:
The linear Equations (38)–(48) are equivalent to the Equation (11) and can be easily solved by the method of MILP.
5. Conclusions
DR is a flexible resource that can provide not only load-shifting, but also frequency control for the power systems. In this paper, the day-ahead scheduling problem considering DR as a frequency control resource is modeled, solved, and analyzed in detail. From the testing results we find that the frequency-control DR can help in reducing the amount of required online generators, so that the total operation cost can be lowered.
Compared with previous studies, the main contributions of this paper can be summarized as following:
A framework incorporating the frequency-control DR in the day-ahead scheduling problem is proposed. Instead of the simple reserve constraint [
19], this paper models the frequency limit equation by using the frequency response model of the system, and the system dynamic characteristics, e.g., the inertia of the generators, are considered.
A method for modeling the frequency limit equation is present. The frequency limit equations considering DR is modeled based on the frequency response model of the power system. The nonlinear frequency limit equation is transformed to a linear arithmetic equation by piecewise linearization, so that the scheduling problem can be solved by MILP.
Notwithstanding the contributions of this paper, there remain some areas to be improved in our future work:
In this paper, the scheduling problem is treated as a deterministic problem. However, the uncertainties of DR are not considered. In some of the references [
1,
27], the uncertainty nature of DR is investigated in detail. To accommodate DR uncertainties, the scheduling model should be modified as a stochastic programming formulation.
The proposed scheduling method is based on an assumption that the system frequency is the same at any part of the grid. However, for a multi-area power system, the frequency of different areas may be different. To investigate the scheduling of a multi-area power system, the frequency response model (in
Figure 3) needs to be modified and the problem will become more complicated.
In addition, though the proposed frequency limit modeling approach can better reflect the system dynamic characteristics, it is more time-consuming to solve the optimization problem, because of the additional Equations (38)–(48). The processing time may be the main challenge when applying the proposed method to larger power systems.
Therefore, our future work may be to develop an improved scheduling model taking into consideration the above problems.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}