
Measuring the Effect of Pack Shape on Gravel’s Pore Characteristics and Permeability Using X-ray Diffraction Computed Tomography




Abstract
:1. Introduction
2. Materials and Methods
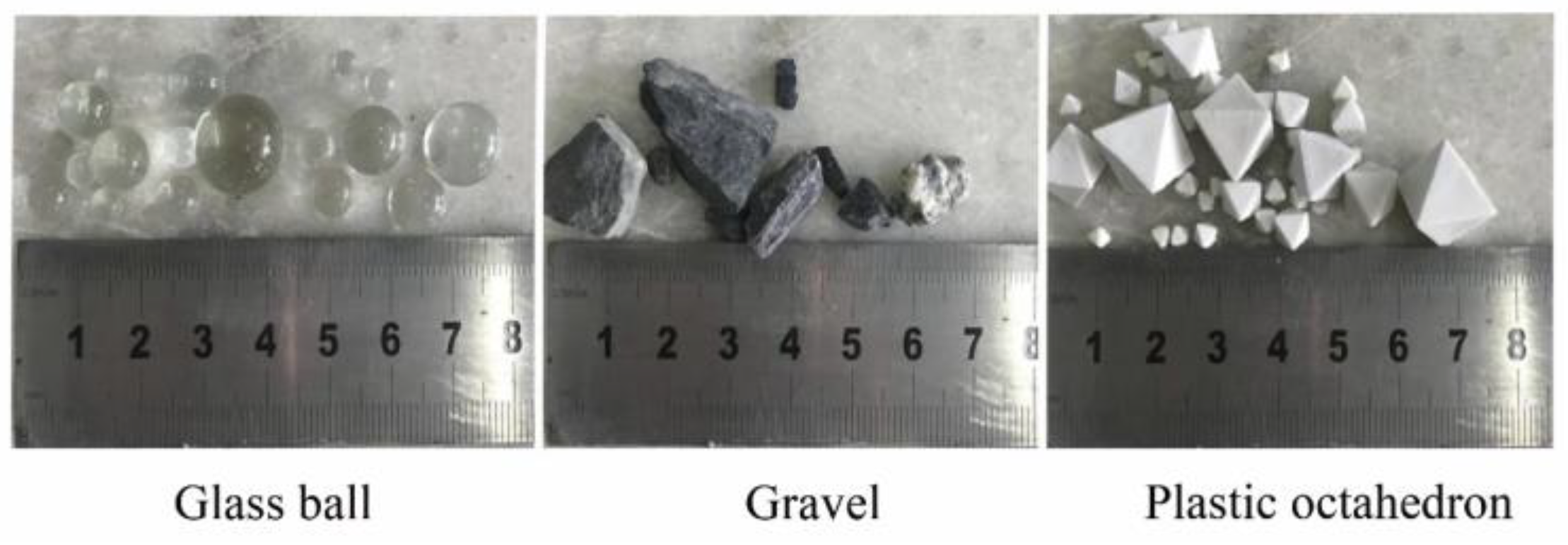
2.1. Materials
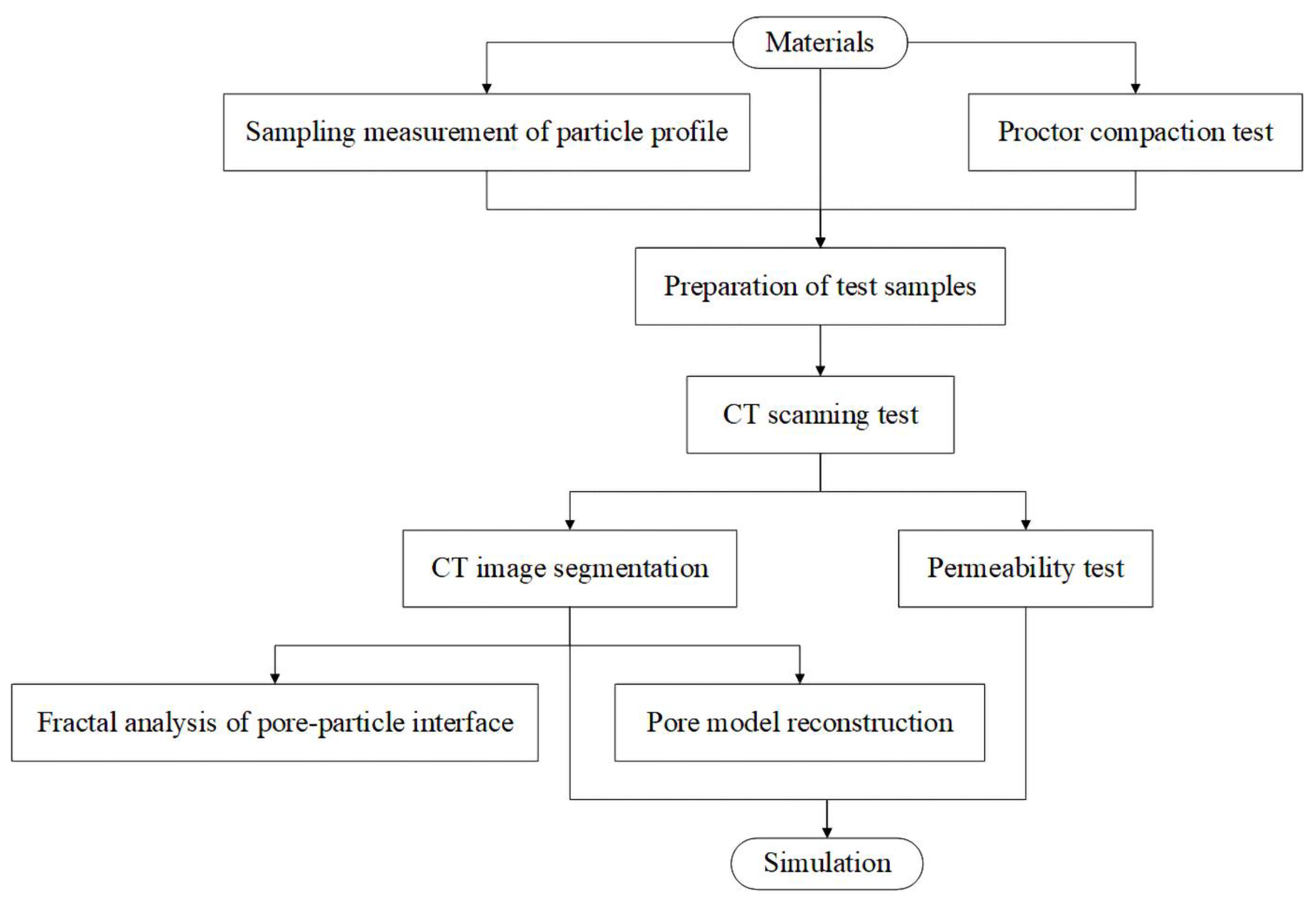
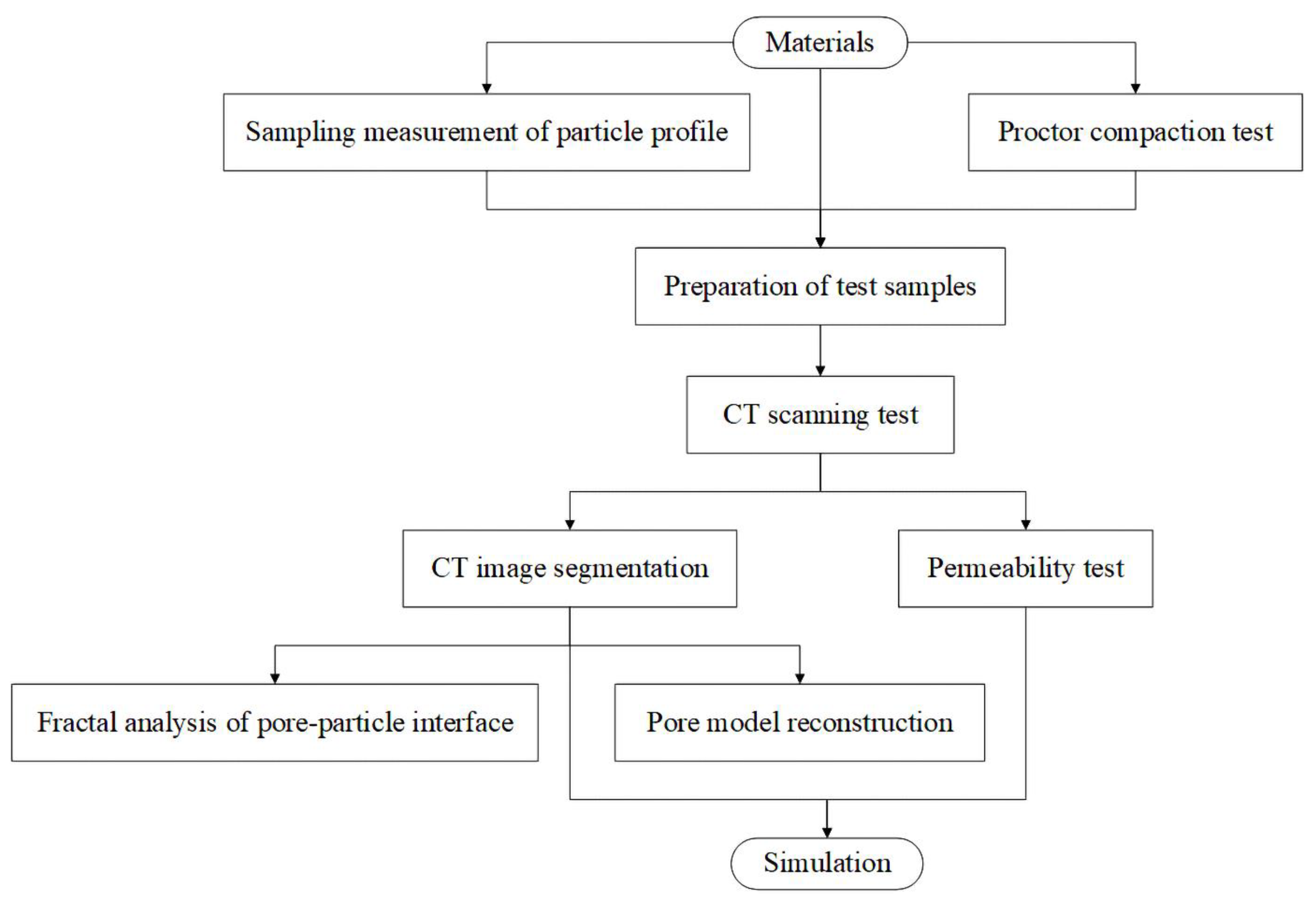
2.2. Experimental Process and Operation
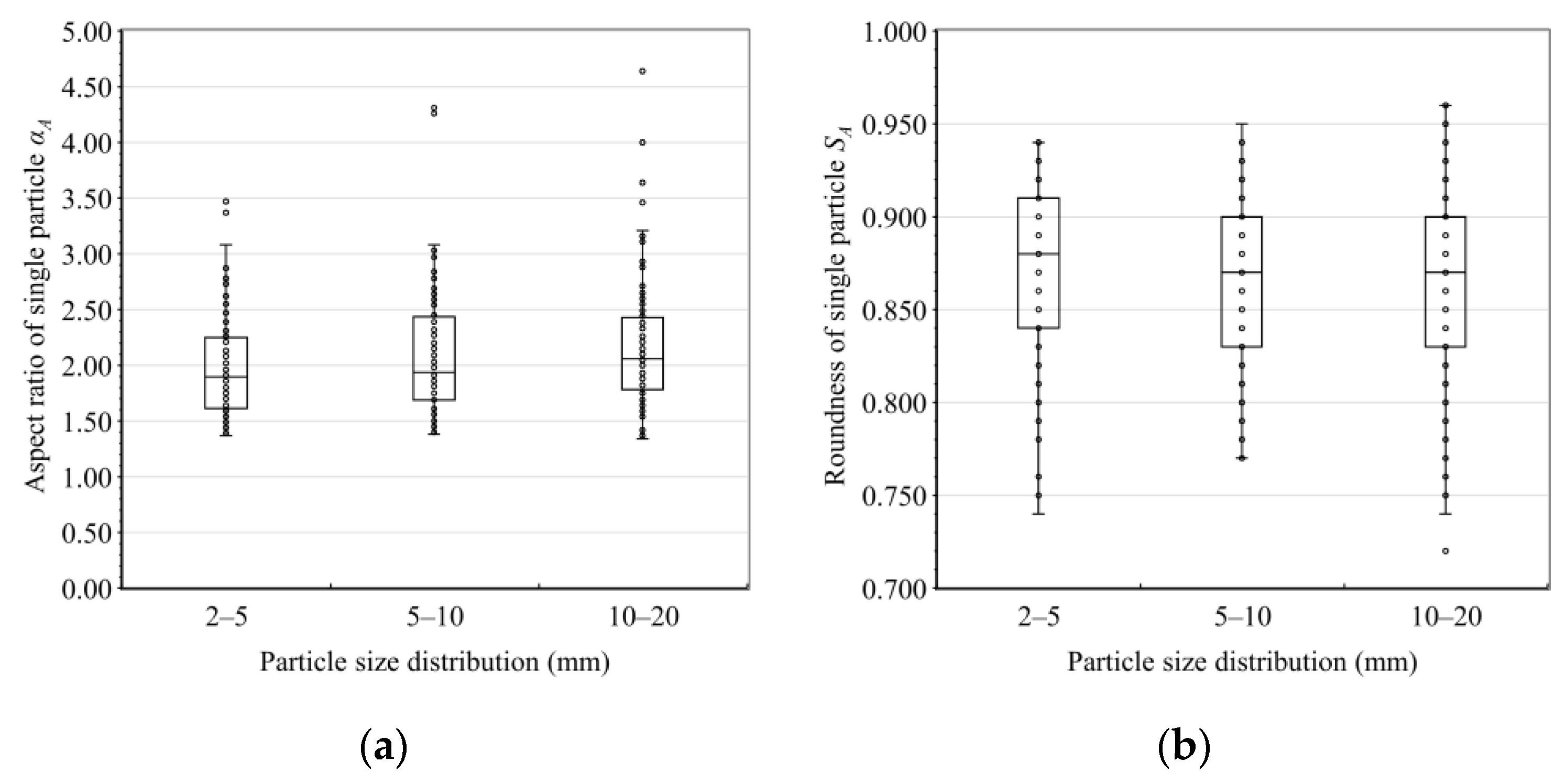
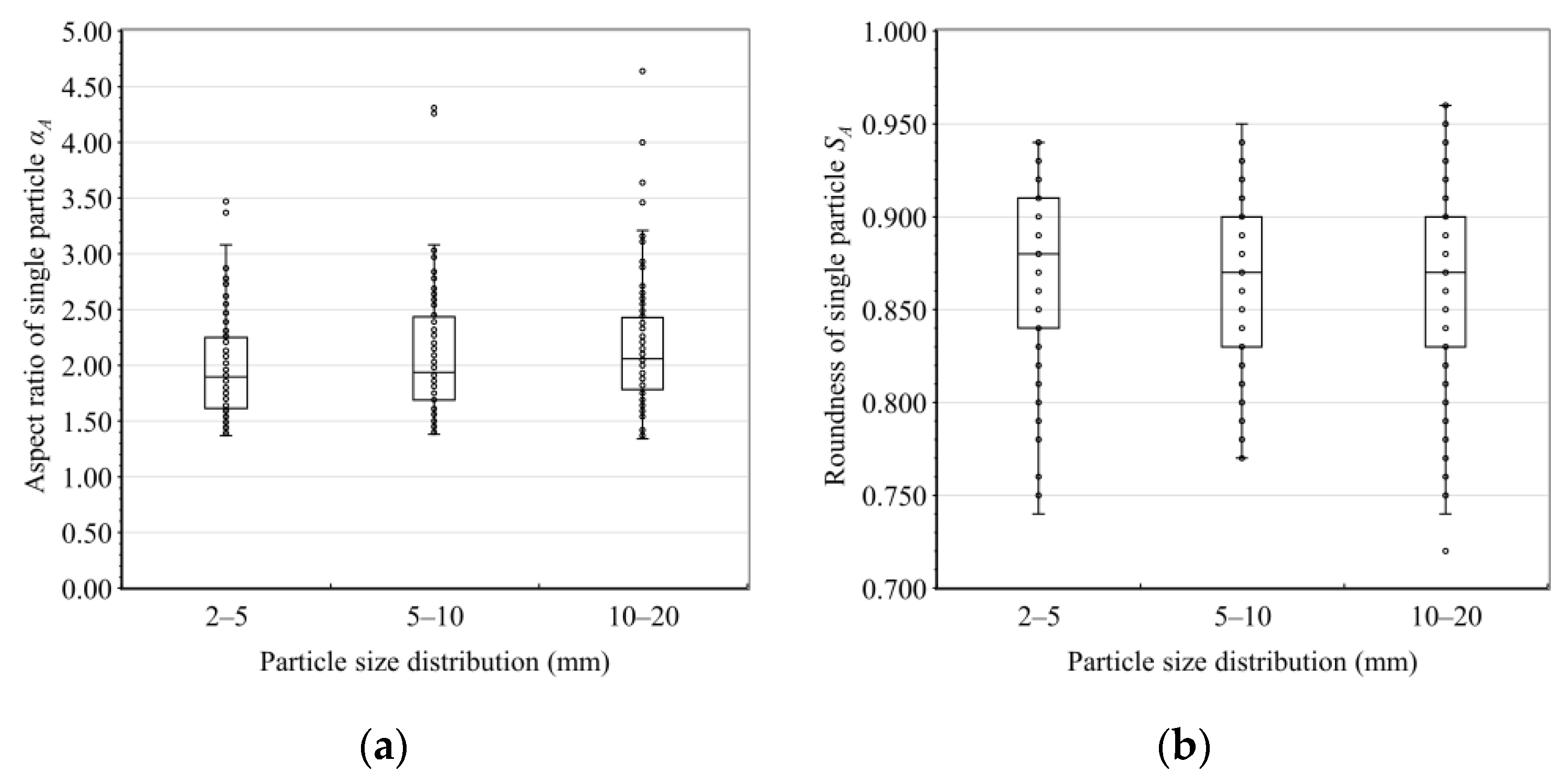
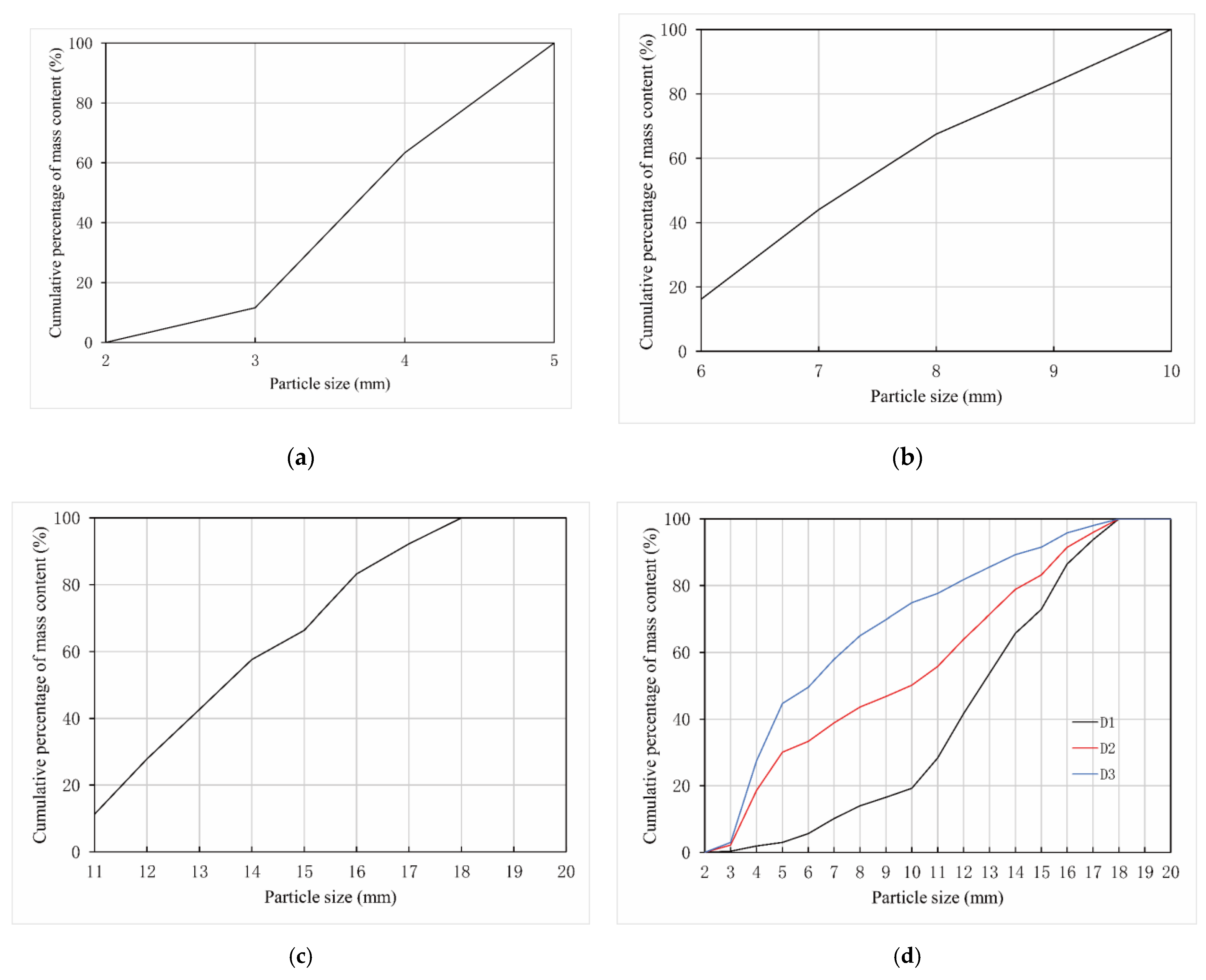
2.2.1. Sampling Measurement of the Gravel’s Shape and the Design of the Particle Size Distribution
2.2.2. Proctor Compacion Test
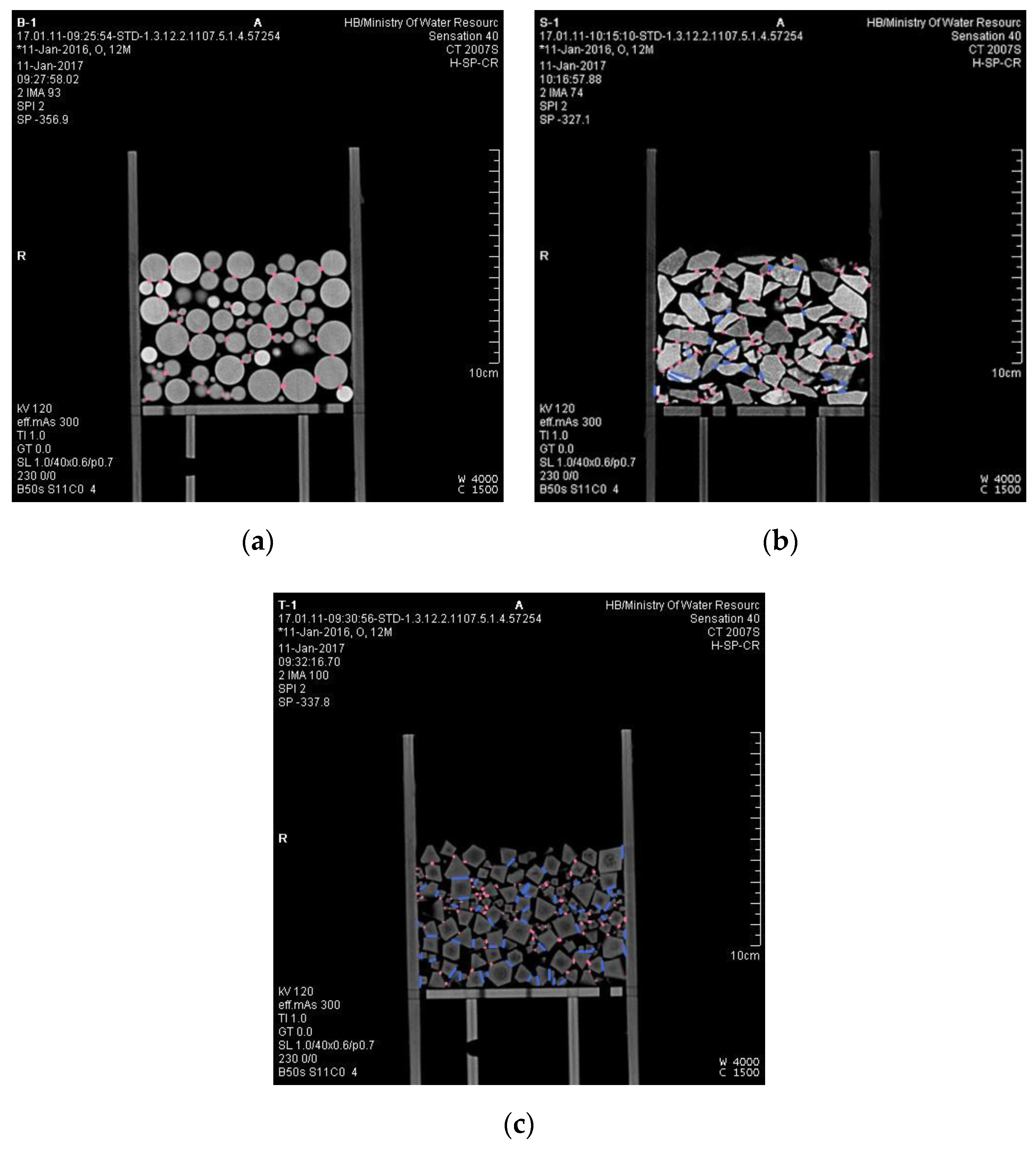
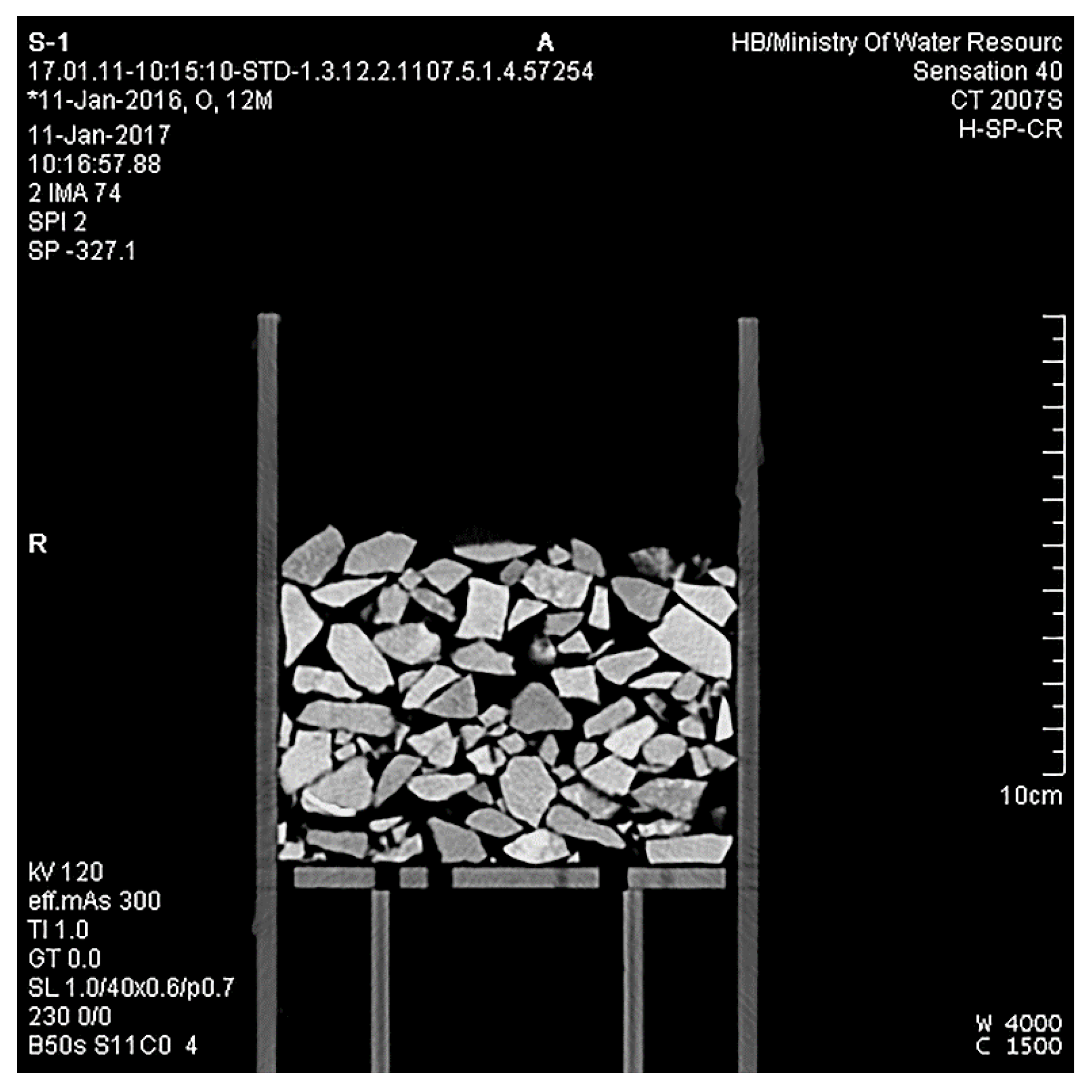
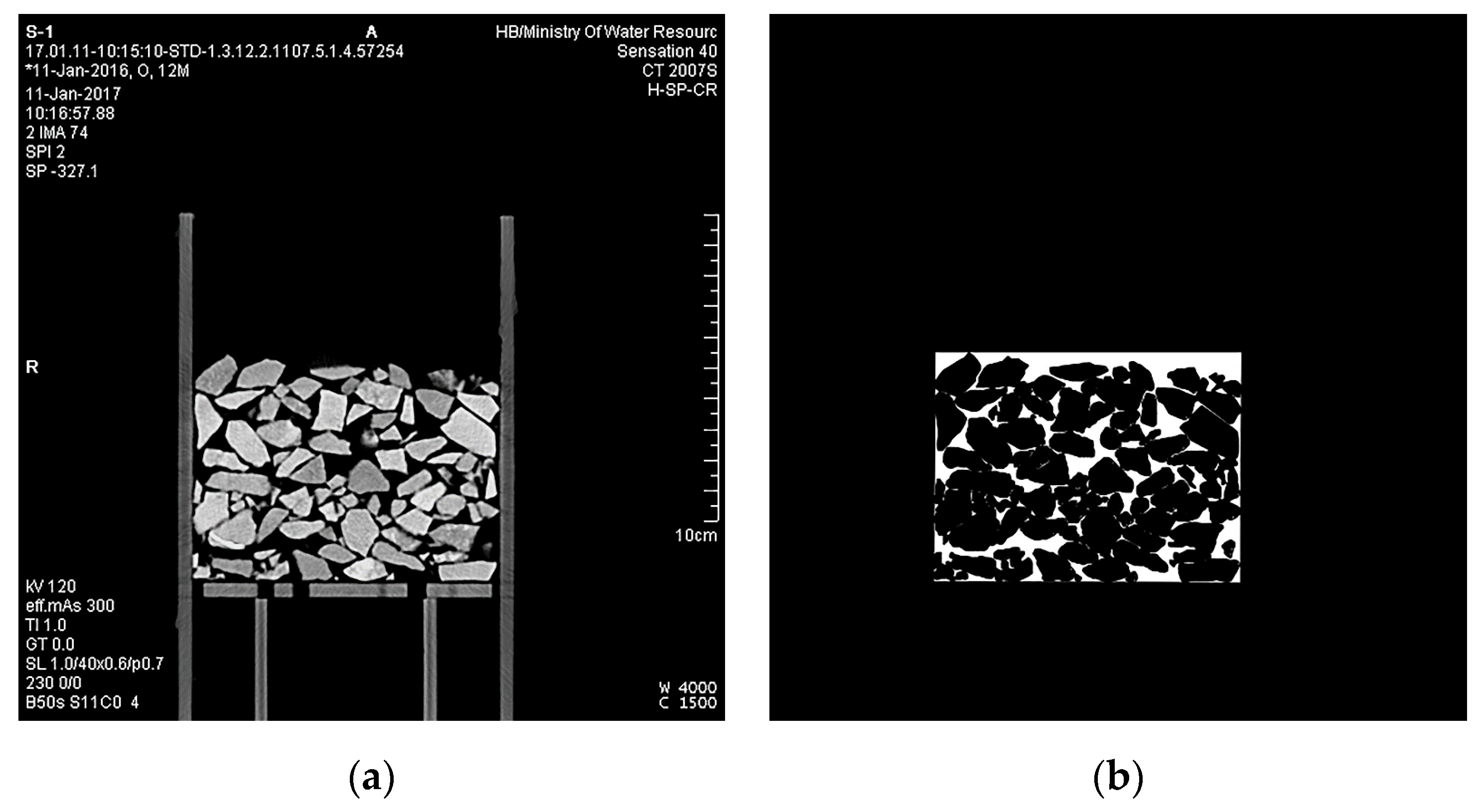
2.2.3. Computed Tomography Scanning Test
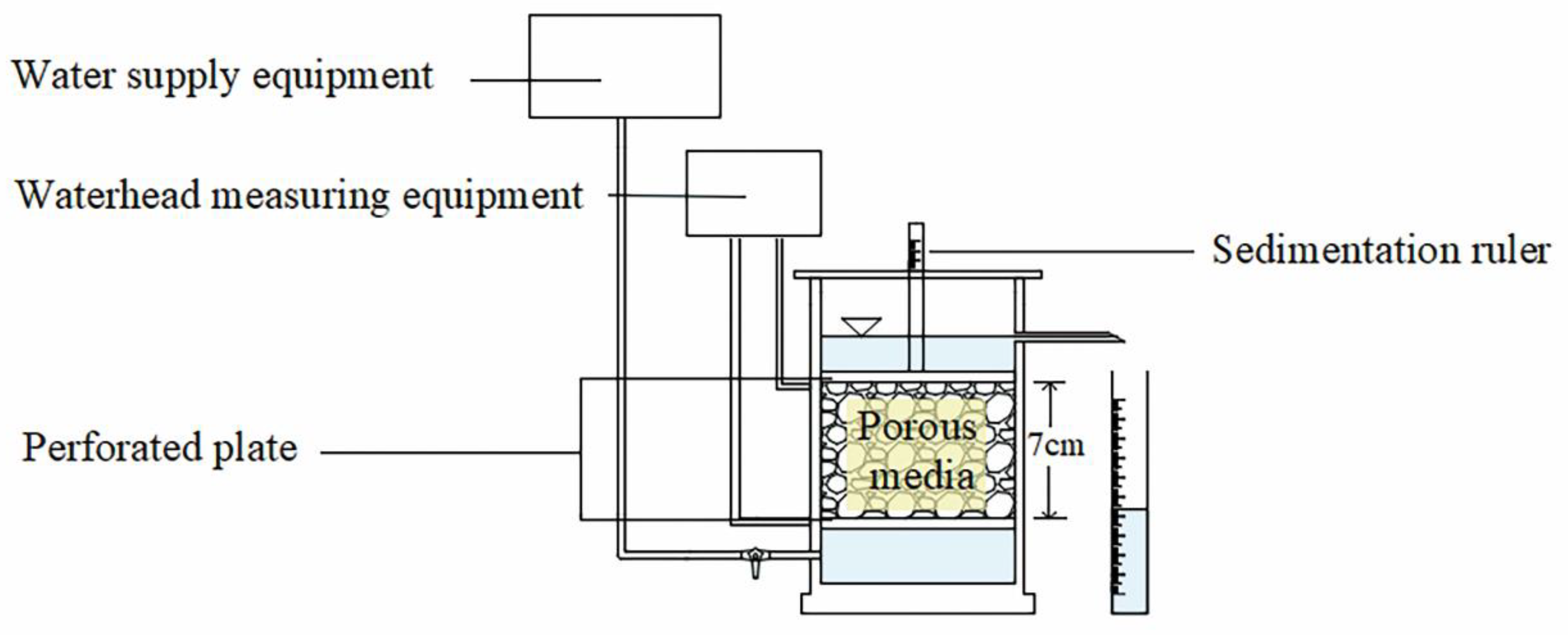
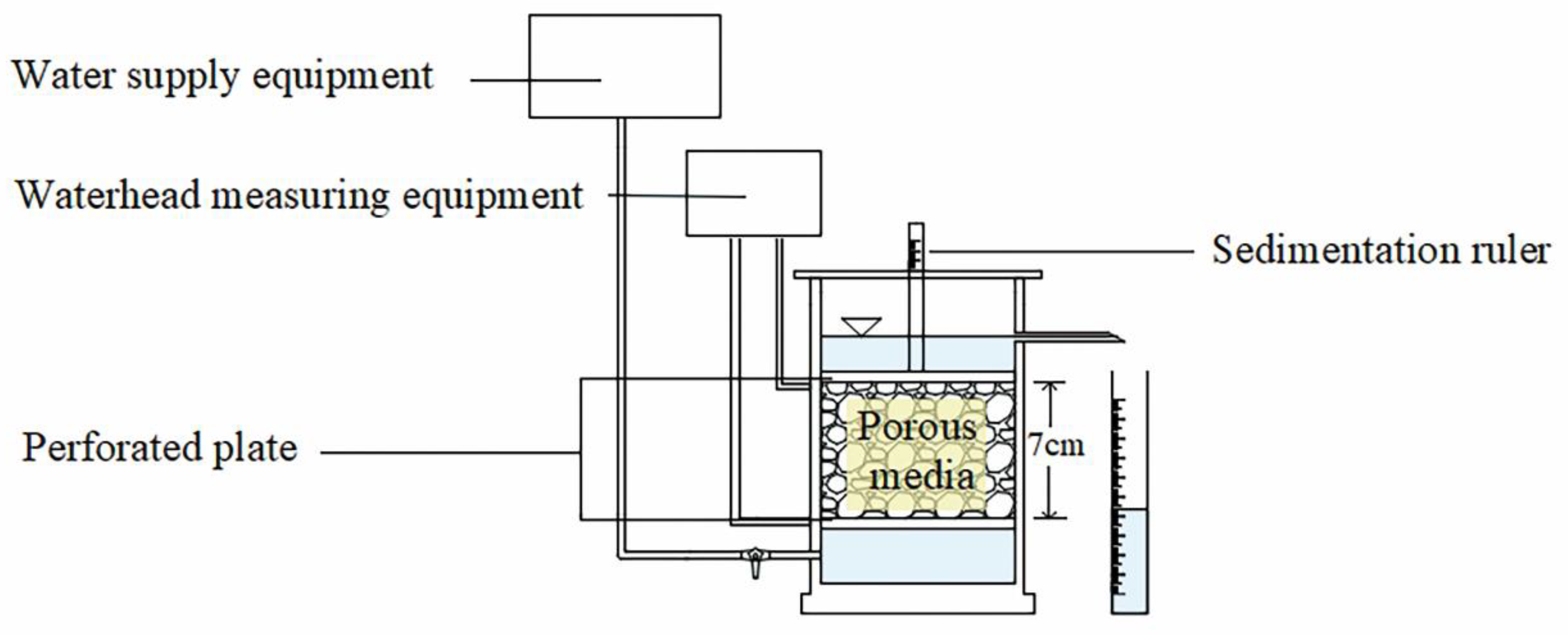
2.2.4. Constant-Head Permeability Test
2.3. The New Method of Surface Area Measurement Based on CT Image Segmentation Using SVM
2.4. Fractal Analysis Method
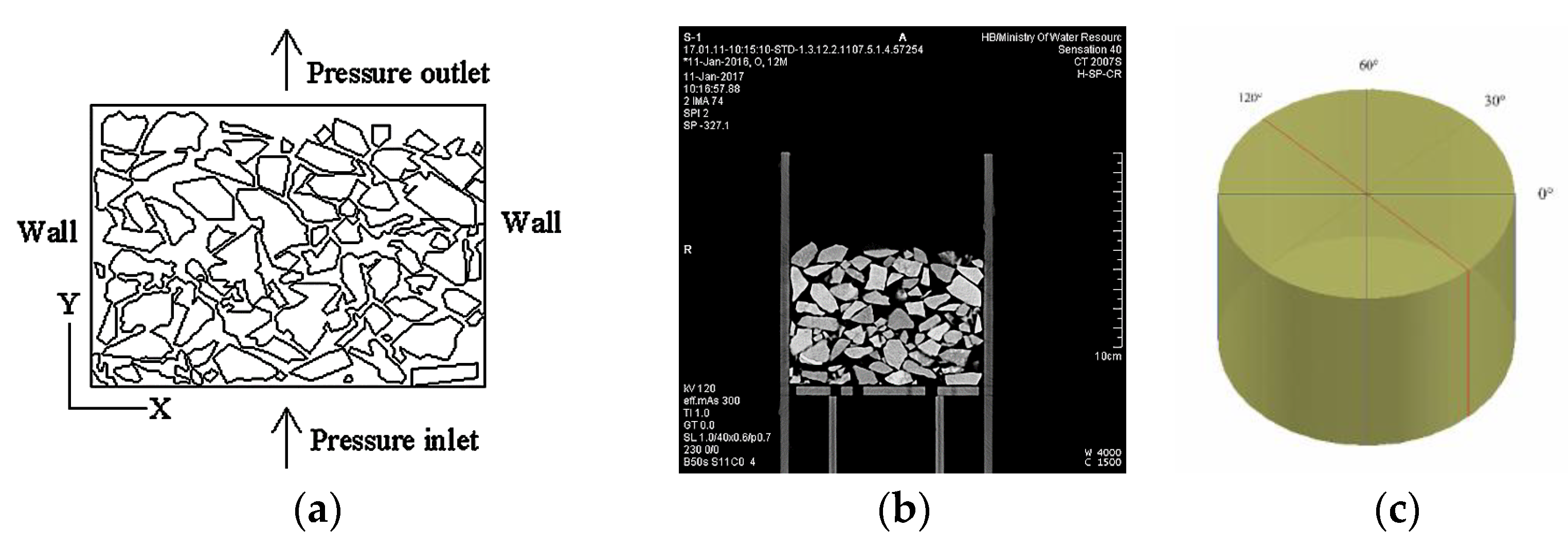
2.5. Pore Scale Simulation
3. Results and Discussion
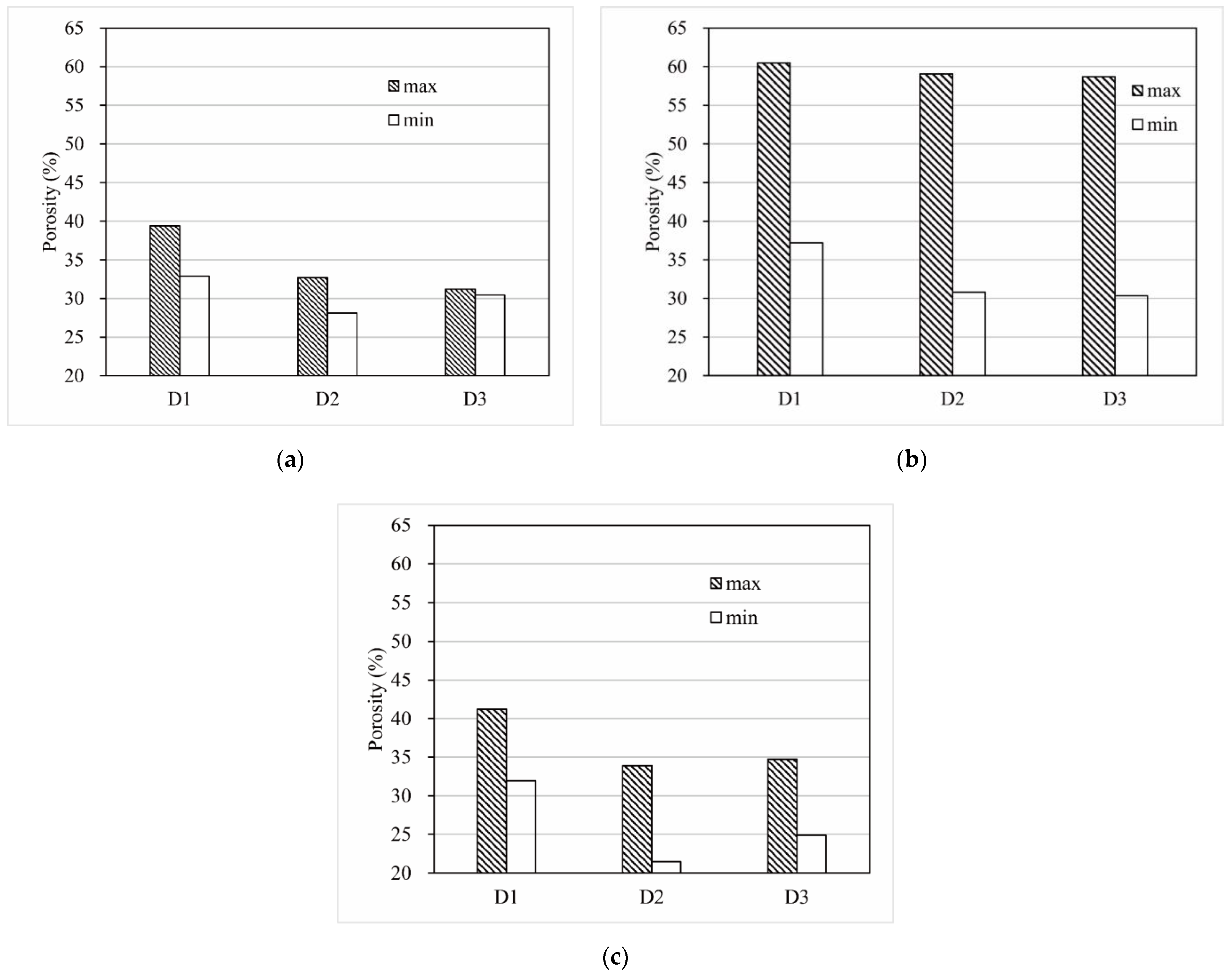
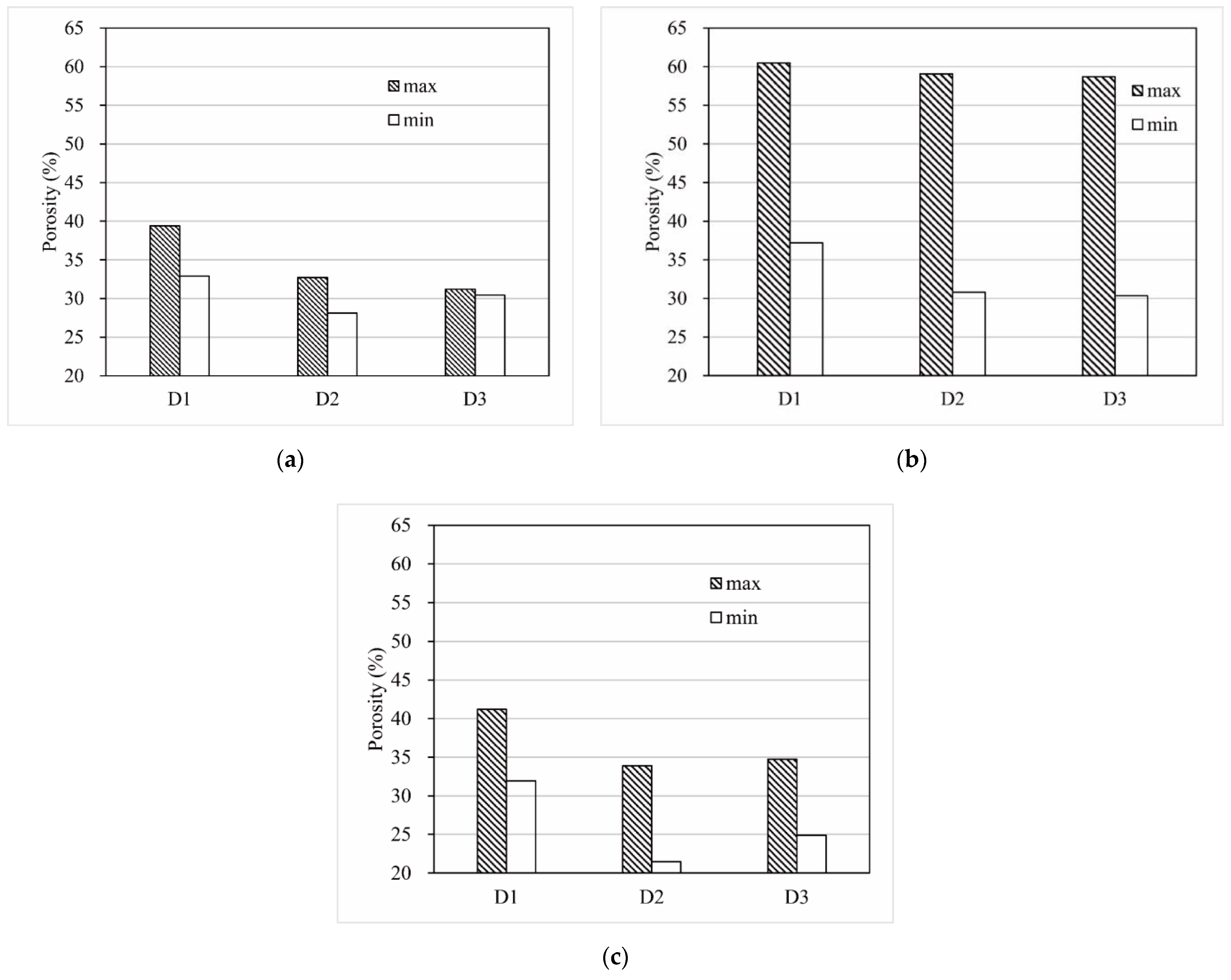
3.1. Gravel Pack Shape, Particle Size Distribution, and Porosity
3.2. Effect of the Particle Pack Shape on the Pore Characteristics of Gravels
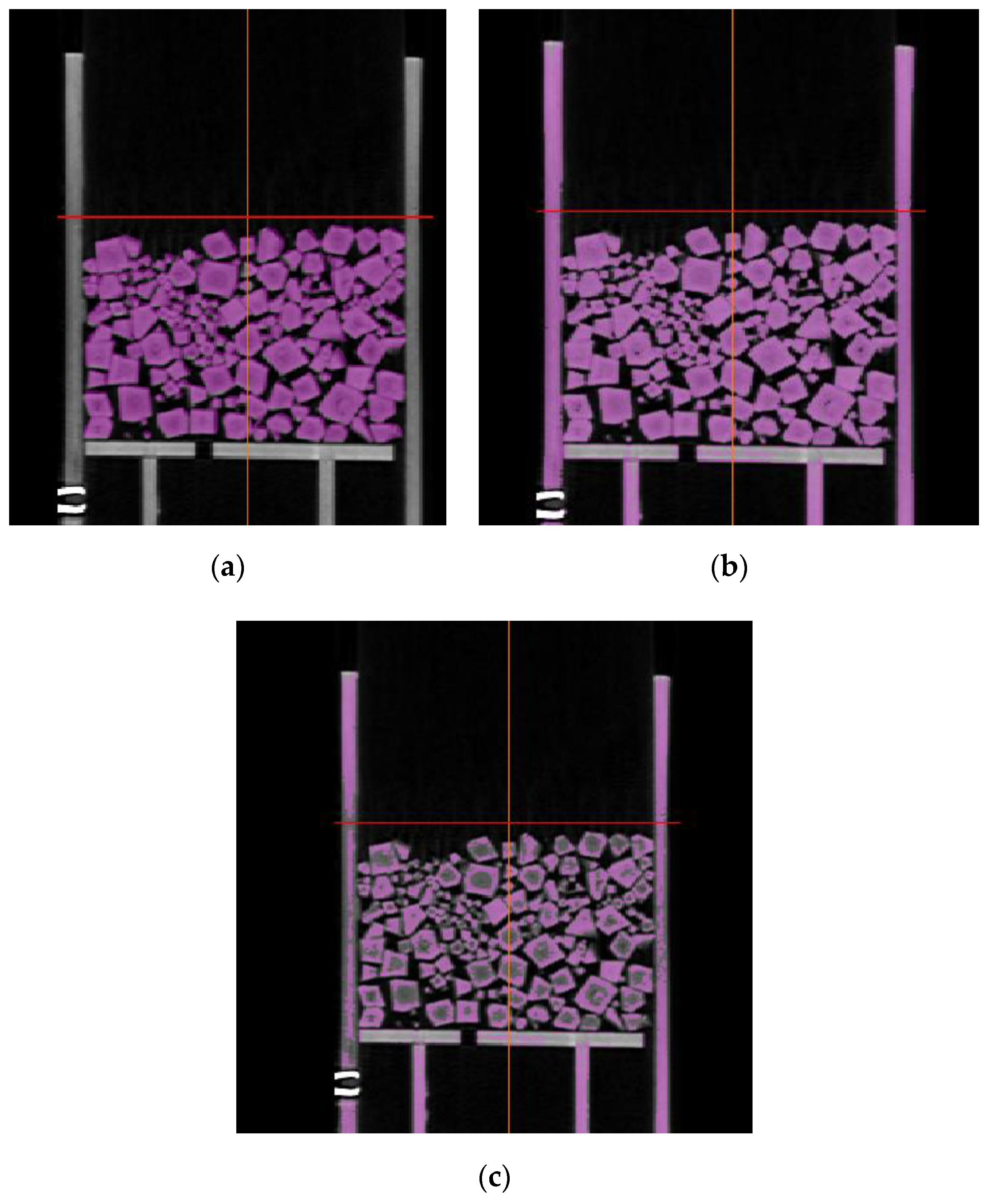
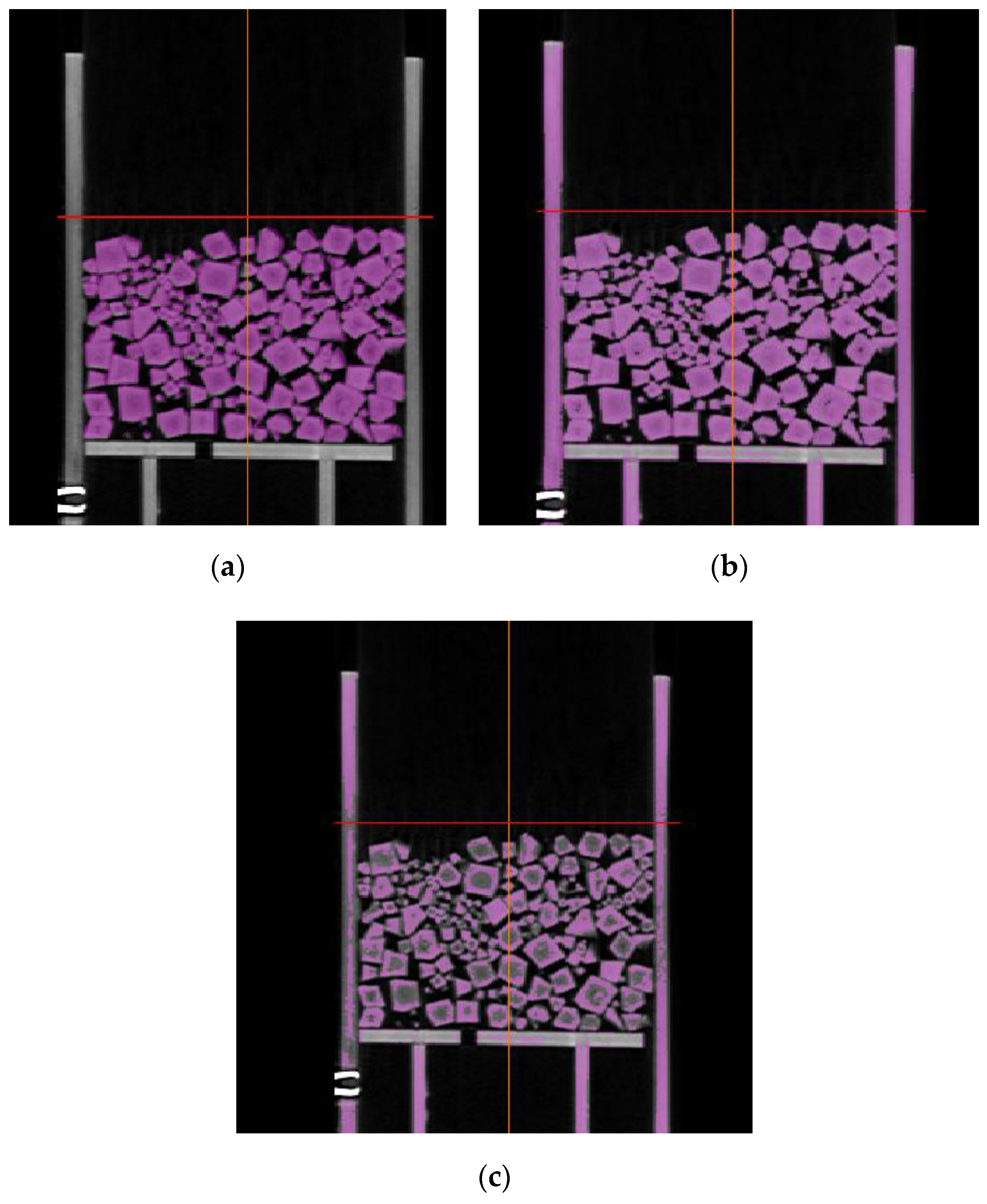
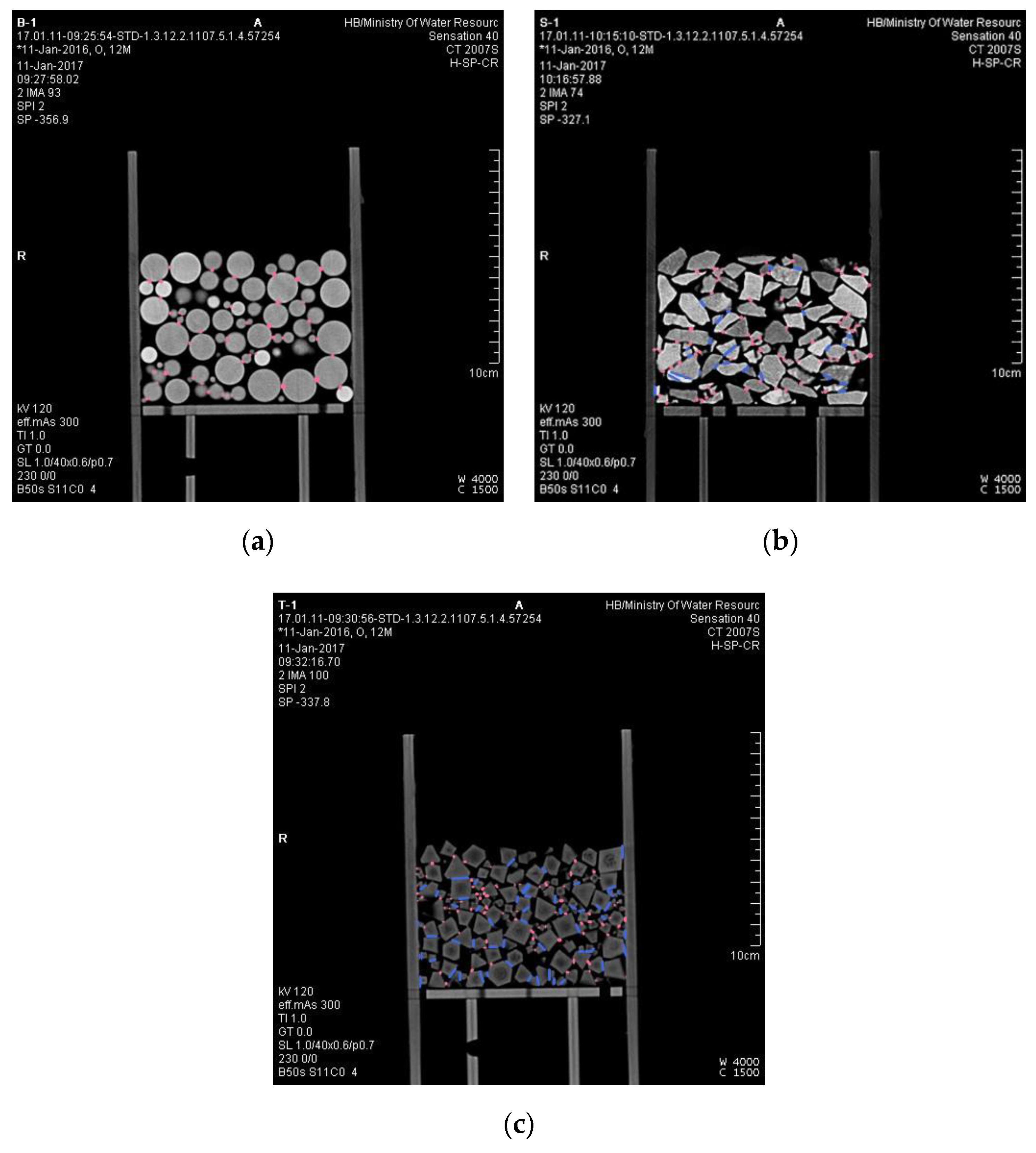
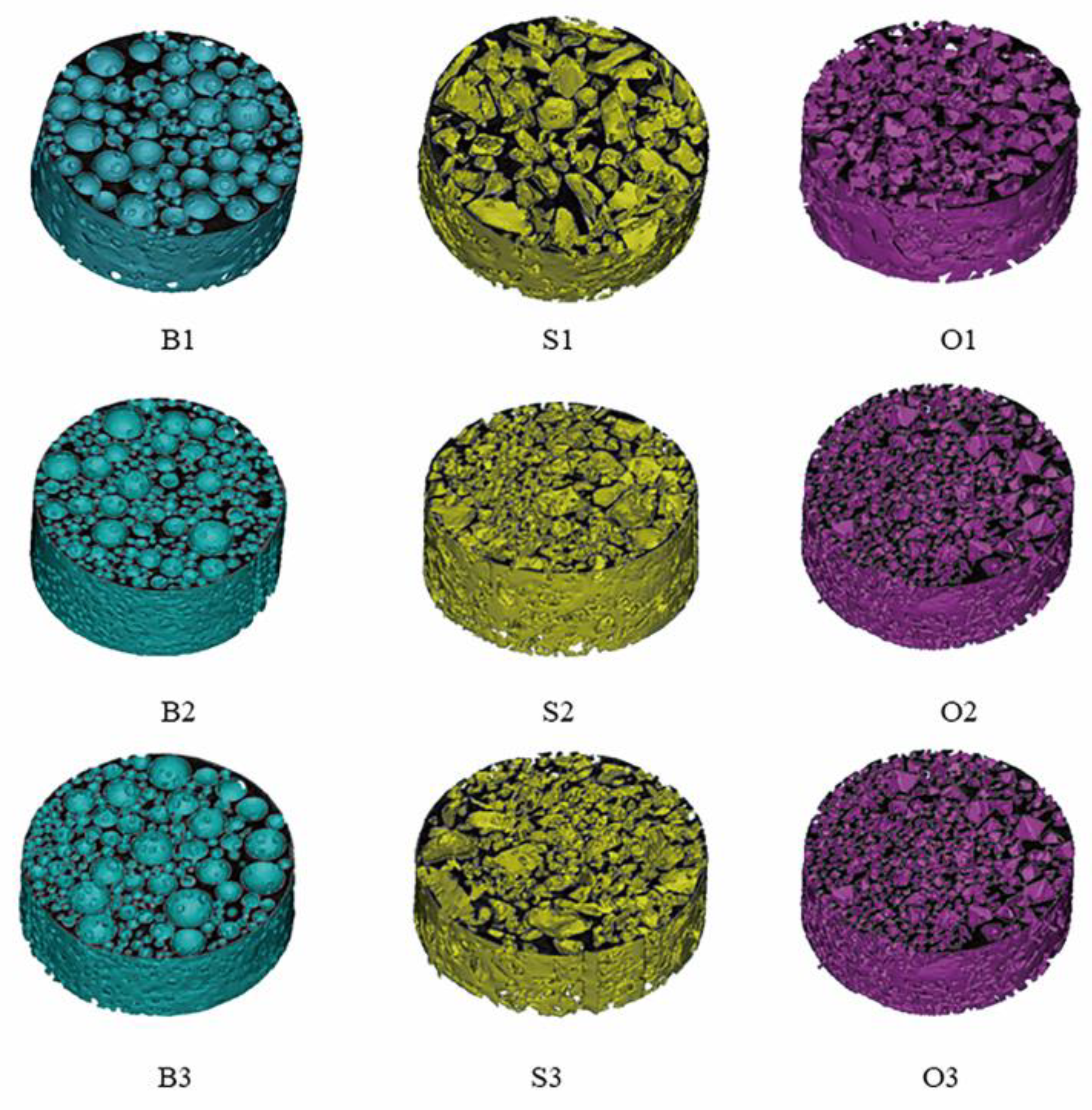
3.2.1. CT Image Segmentation
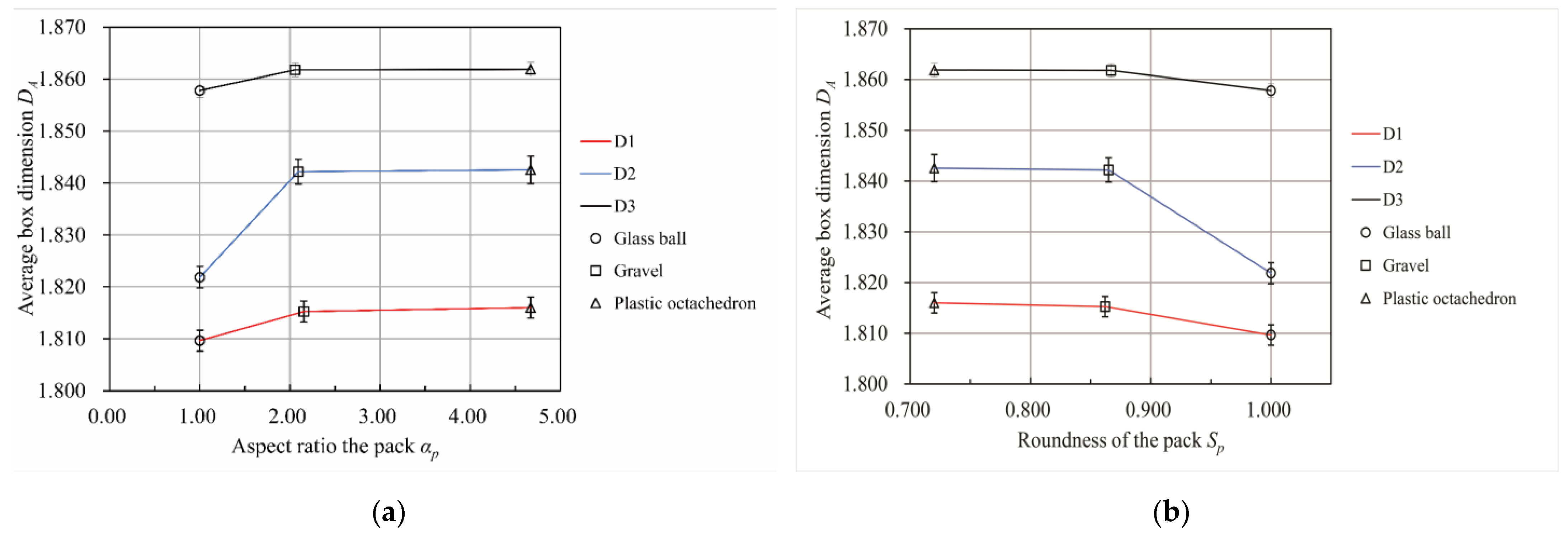
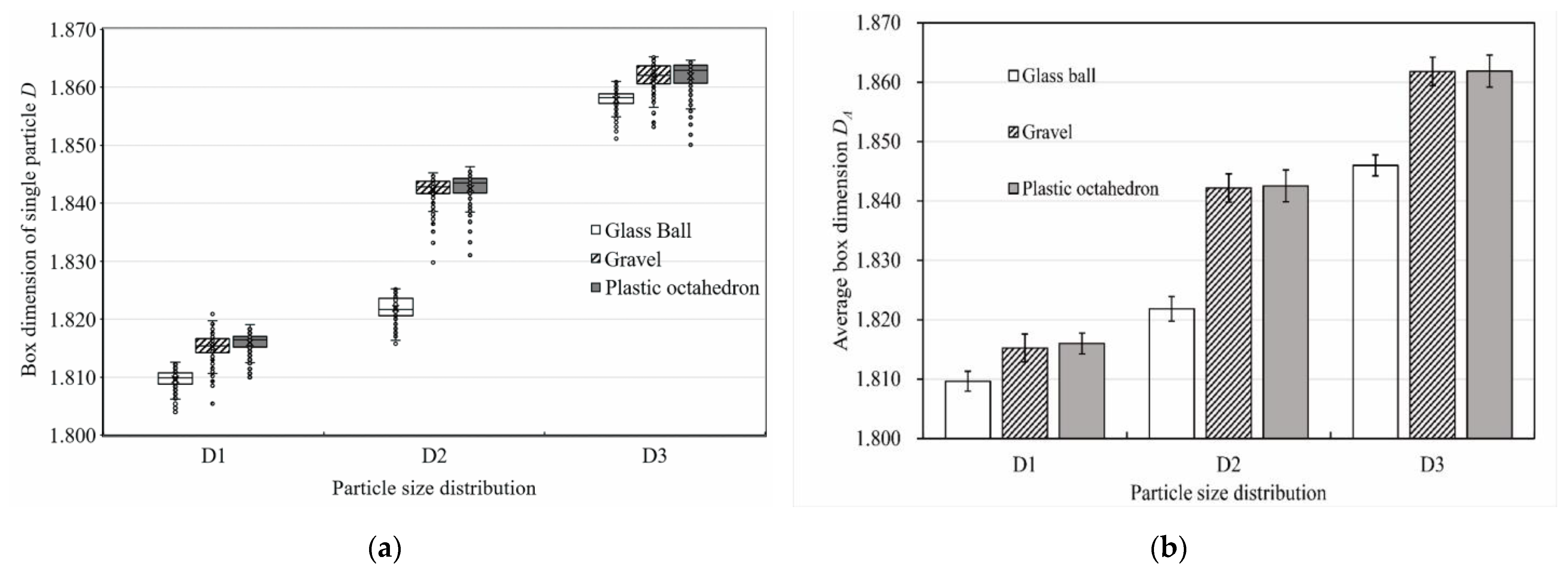
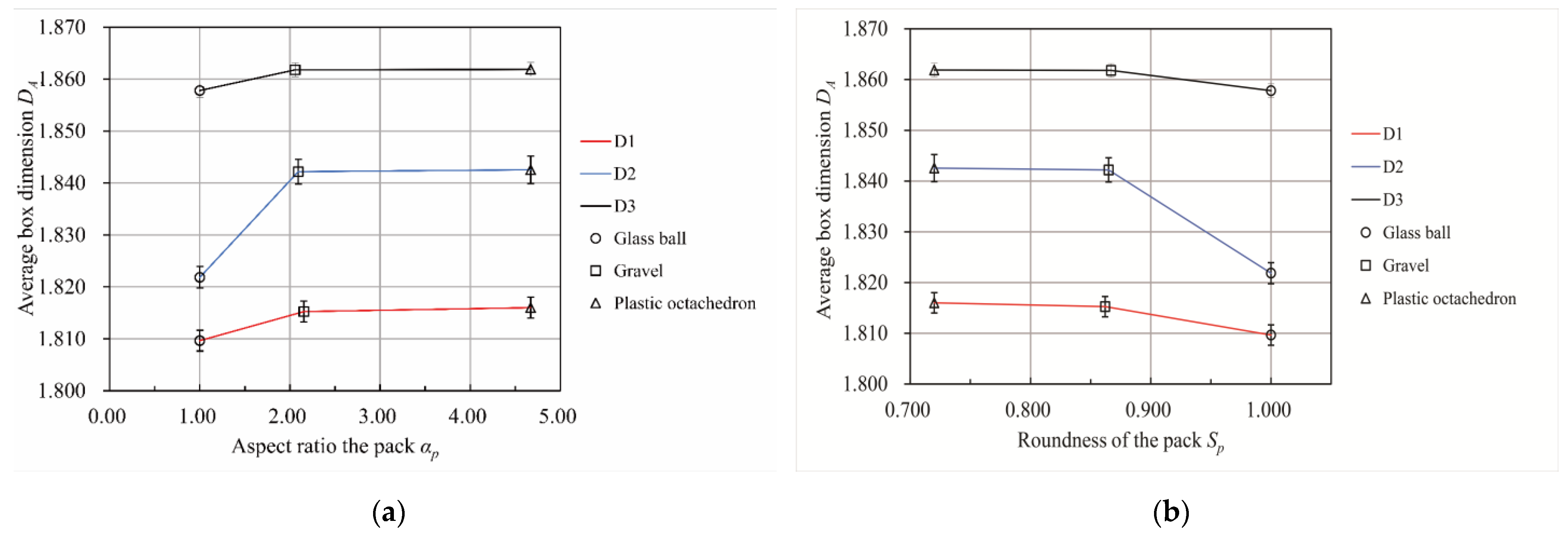
3.2.2. Fractal Analysis of the Pore–Particle Interface Based on CT Images
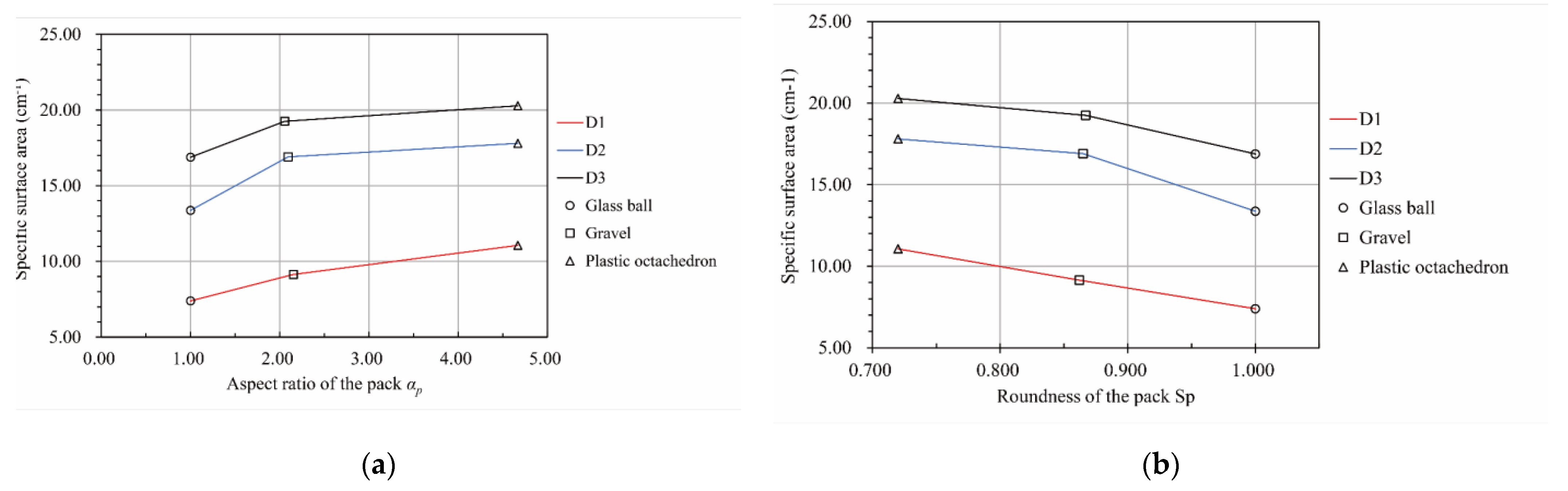
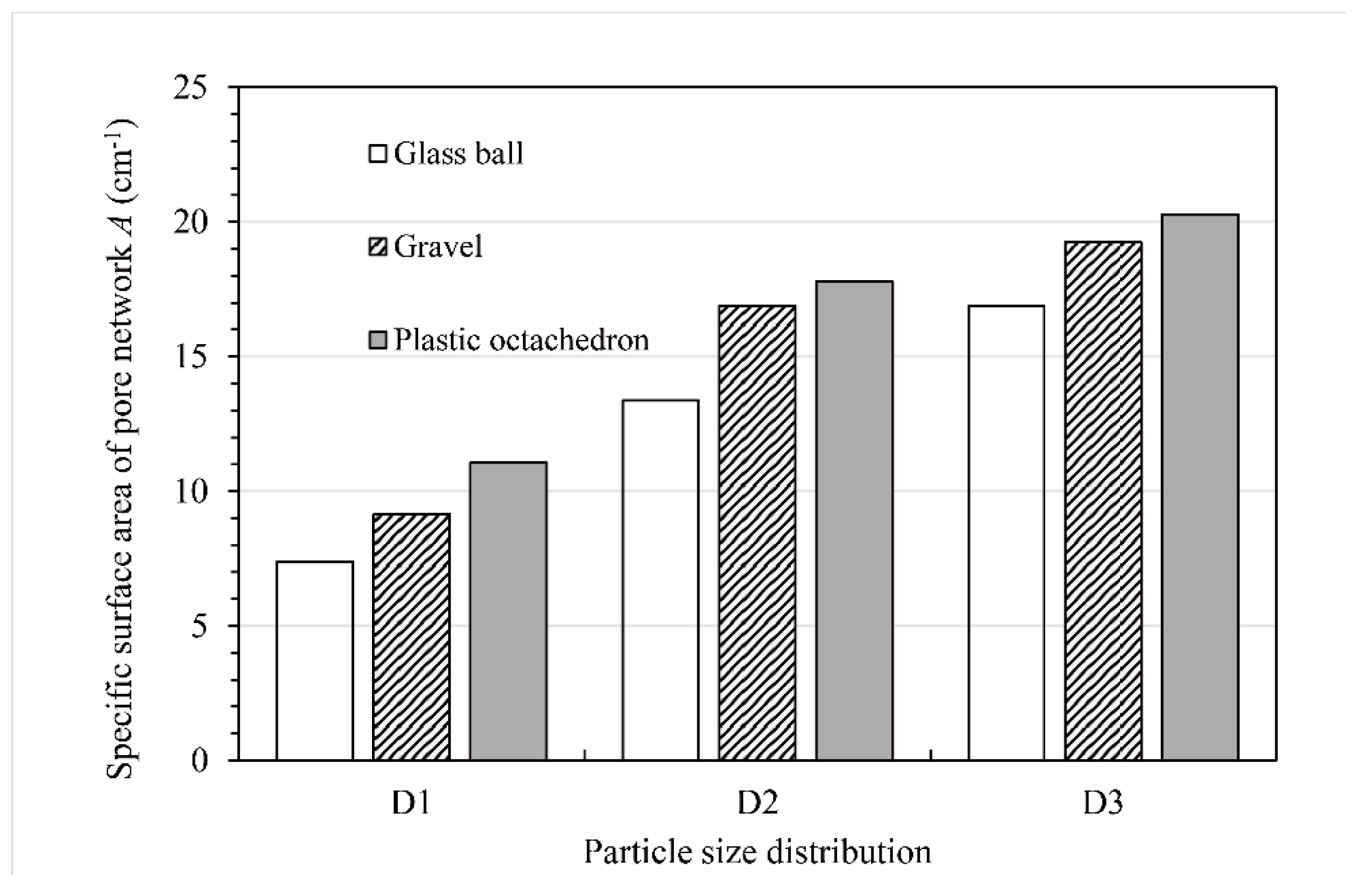
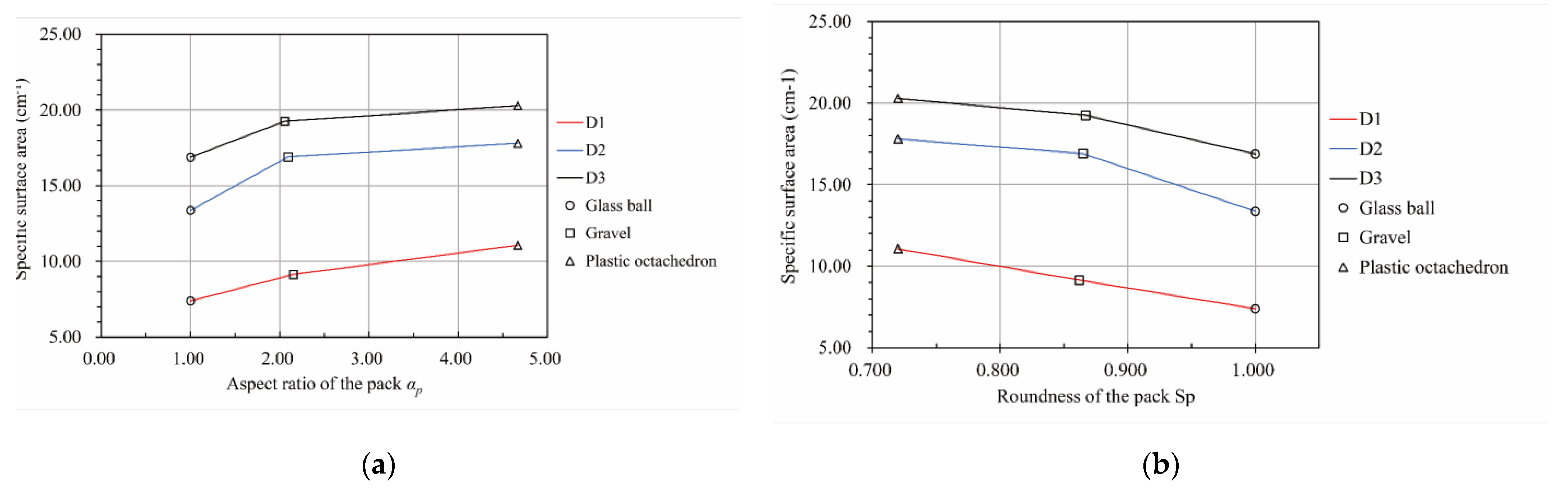
3.2.3. Analysis of the Specific Surface Area of the Reconstructed Pore Network Model
3.3. Effect of the Particle Pack Shape on the Permeability of Gravel
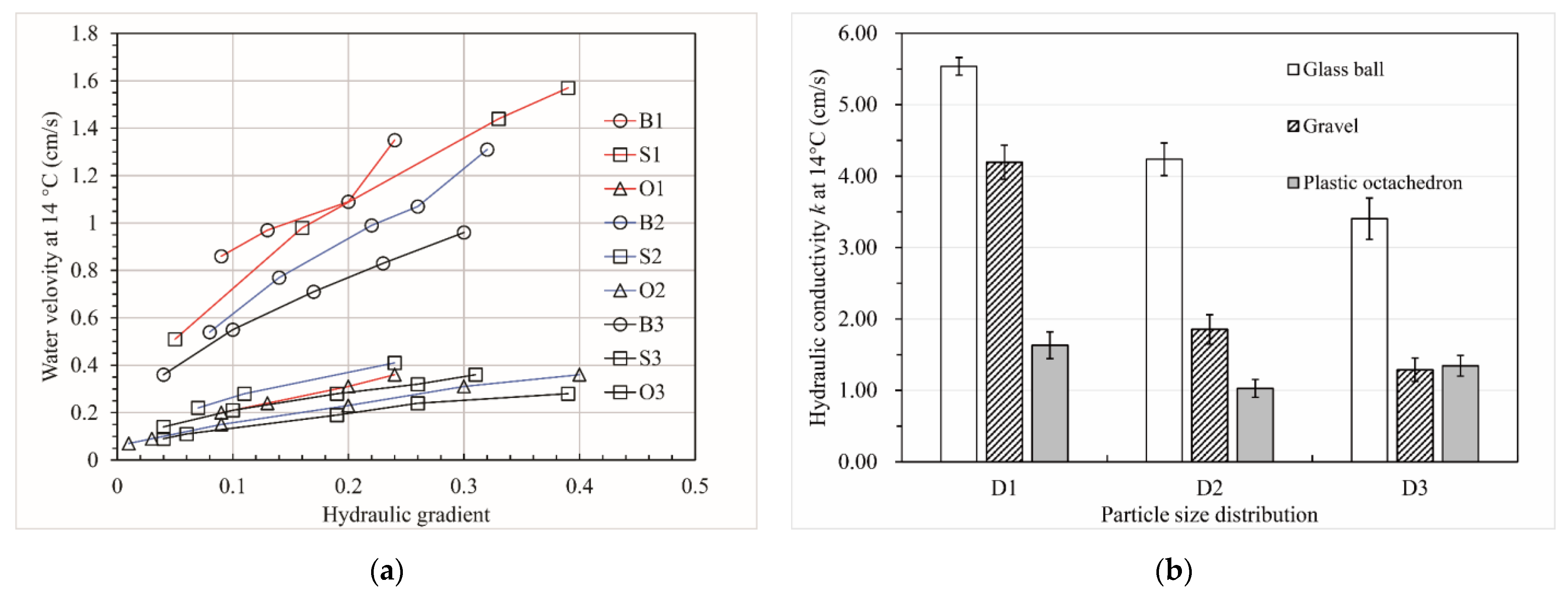
3.3.1. Constant-Head Permeability Test Result
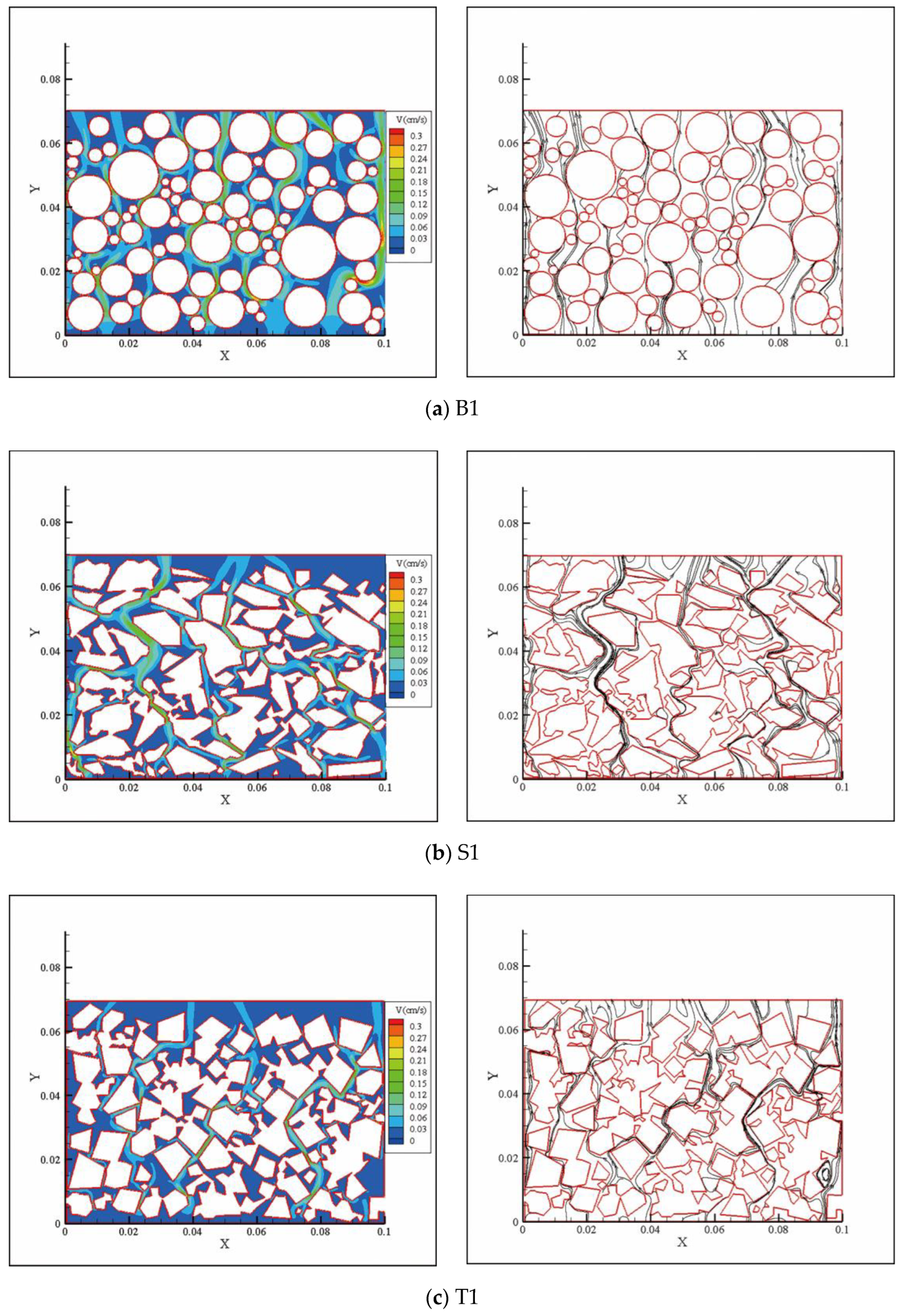
3.3.2. Simulation
3.4. Contributions, Applications, and Limitations
- A method for estimating the shape of a gravel pack via manual sampling and measuring the shape factor of gravel with three-dimensional physical meaning was proposed. Previous studies showed that the hydraulic conductivity of the filter material in a natural quarry is higher than that in a blasting quarry under the same conditions [3,22]. However, because the shape of the gravel pack is difficult to quantify through the laboratory test, few studies have considered the particle shape in the design and selection of the filter material. Many dams are built in alpine and canyon areas for higher economic benefits. They use blasted gravel as dam building materials, which is different from the current design specification and does not consider the particle shape. According to our results, for better anti-seepage, the dam building material should preferably be blasted gravel with a large aspect ratio and small roundness. After particle size sieving in the stockyard, gravel of the same particle size group can be sieved again for particle shape using a rectangular or rhombus sieve.
- A method for measuring the surface area of gravel and its pore network based on SVM segmentation and the reconstruction of CT images was proposed. This method can self-adjust the parameters through deep learning to measure the surface area of particles with different densities and sizes, which is suitable for engineering applications. In addition, it has few requirements in terms of vessel materials and can be coupled with other hydraulic and mechanical tests. This method increases the practicability of the formula for predicting the hydraulic conductivity of gravel using the specific surface area in engineering applications [11,14,15,16,62,63,64,69,70,71]. During a dam’s construction, a laboratory is set up on the site to test the particle size distribution and dry density of the filled part to control the construction quality. As filling uses rolling technology, the gravel may break during the rolling process, which causes the actual particle size distribution and dry density of the filling material to deviate from the design value. Based on the consensus that material with a more significant specific surface area has low permeability [11,14,15,16,62,63,64,69,70,71], the specific surface area can be added for construction control in the filter using our measurement method.
4. Conclusions
- A new method was proposed to estimate the gravel pack shape; this method involved manual sampling and measuring the gravel’s aspect ratio and roundness with three-dimensional physical significance, which is expected to be popularized for the study of the shape of actual gravel packs and their related hydraulic or mechanical properties. One should pay attention to making the gravel pack’s particle size distribution consistent with the sample’s particle size distribution and control the particle size to the centimeter level when using this method.
- A new method was put forward that uses SVM segmentation and the reconstruction of CT images to measure the surface area of a gravel pack and its pore network. The advantage of the method is that it can be coupled with other hydraulic and mechanical tests and can automatically adjust the parameters according to different testing materials for convenient use in engineering. The specific surface area can be added for construction control of the filter using this method.
- A gravel pack with a larger aspect ratio and smaller roundness had a larger box dimension associated with its pore–particle interface and a greater specific surface area of the pore network, which meant it had a more complex pore structure. The content of particles less than 5 mm affected the relationship between the shape factor, pore–particle interface, and specific surface area of the pore network. The influence degree of particle shape was dependent upon the content of fine particles.
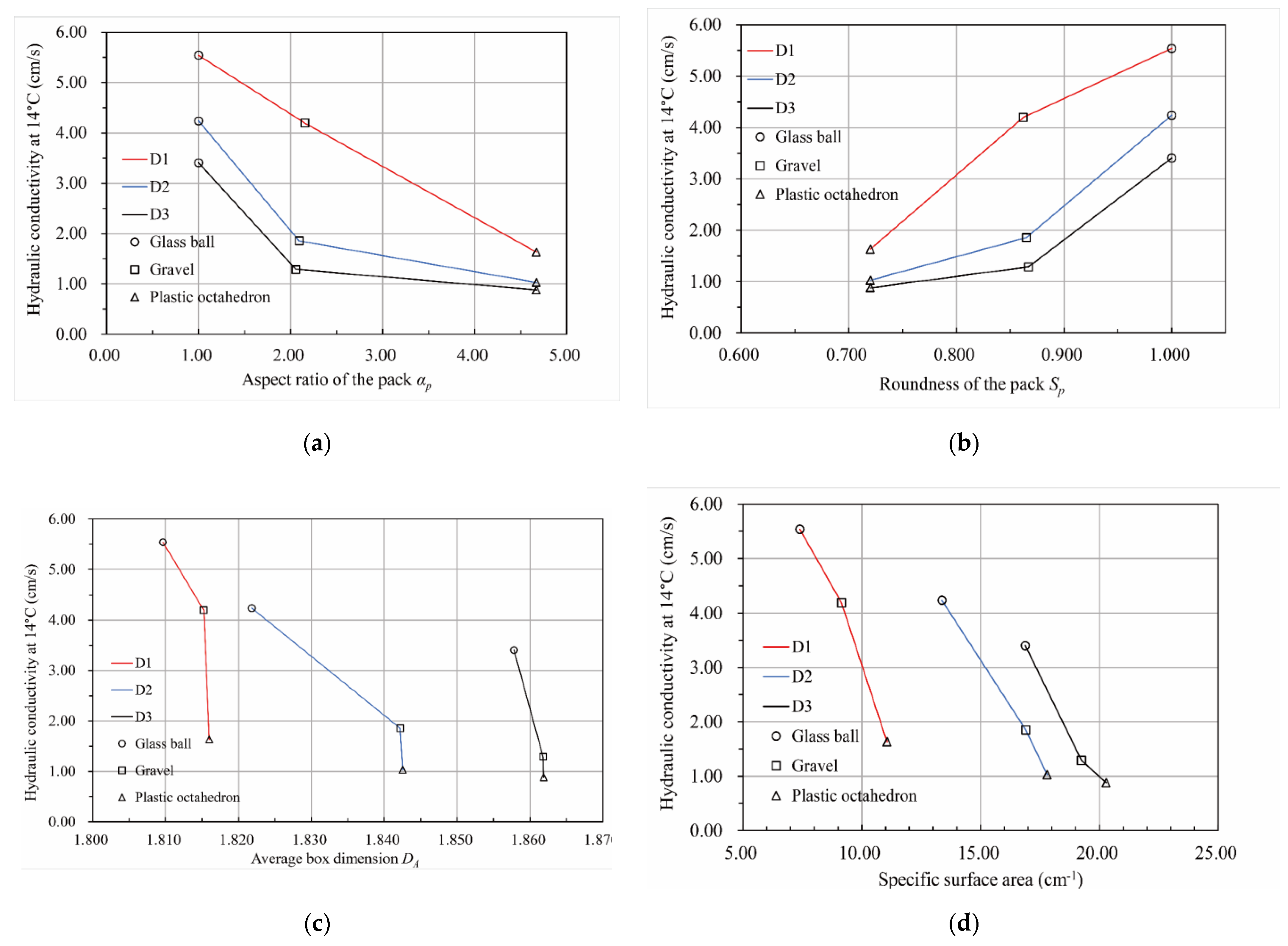
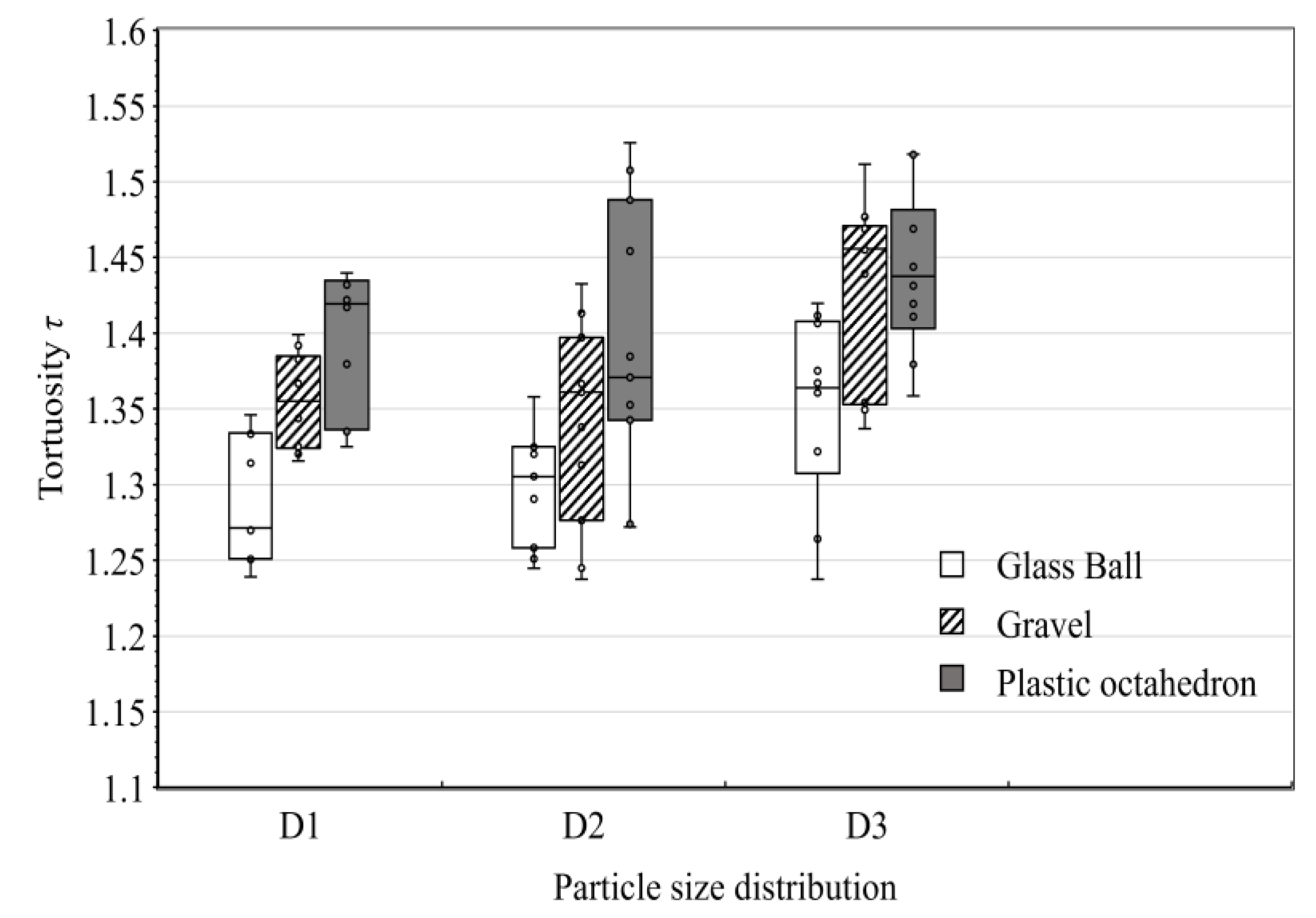
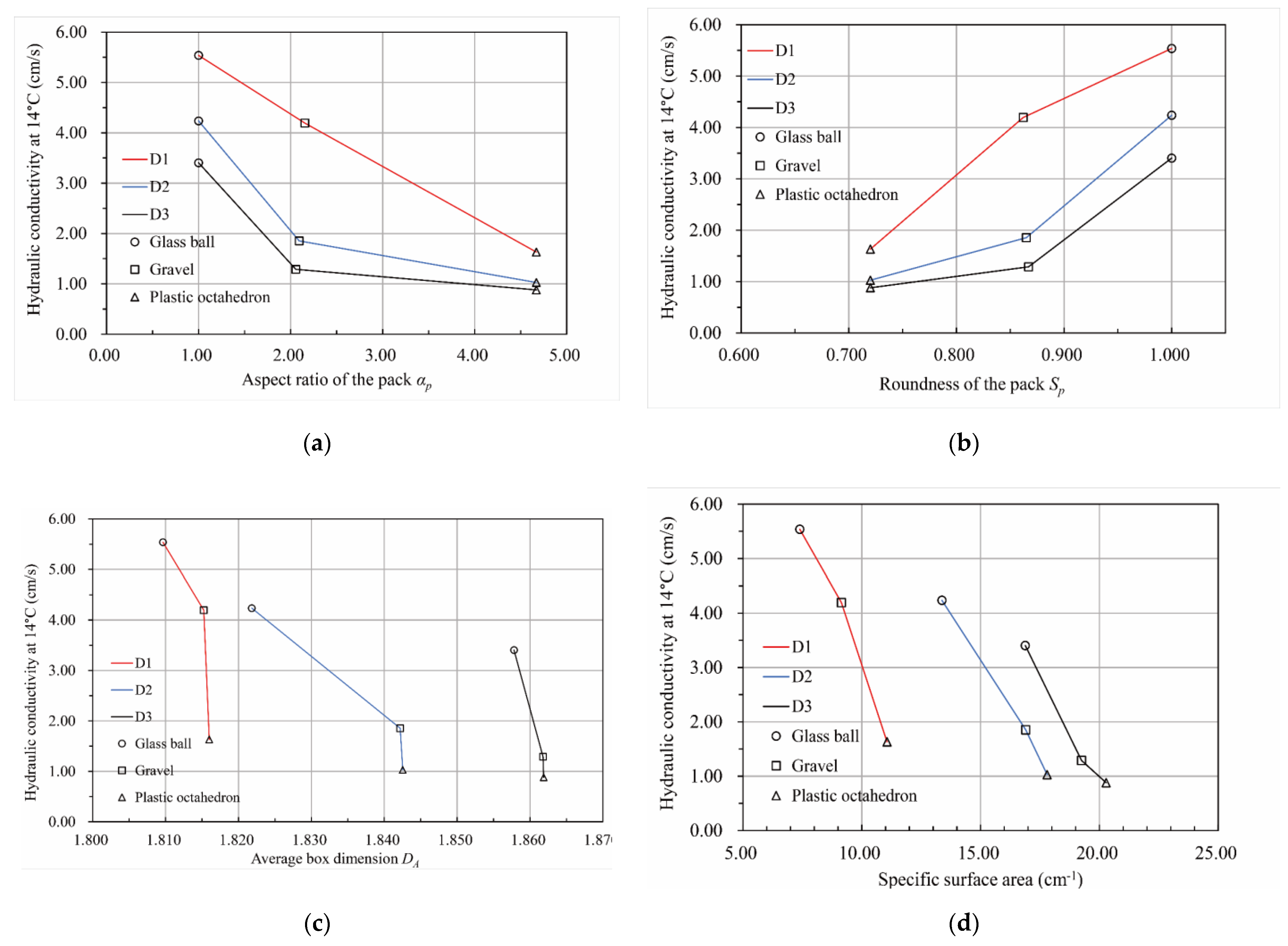
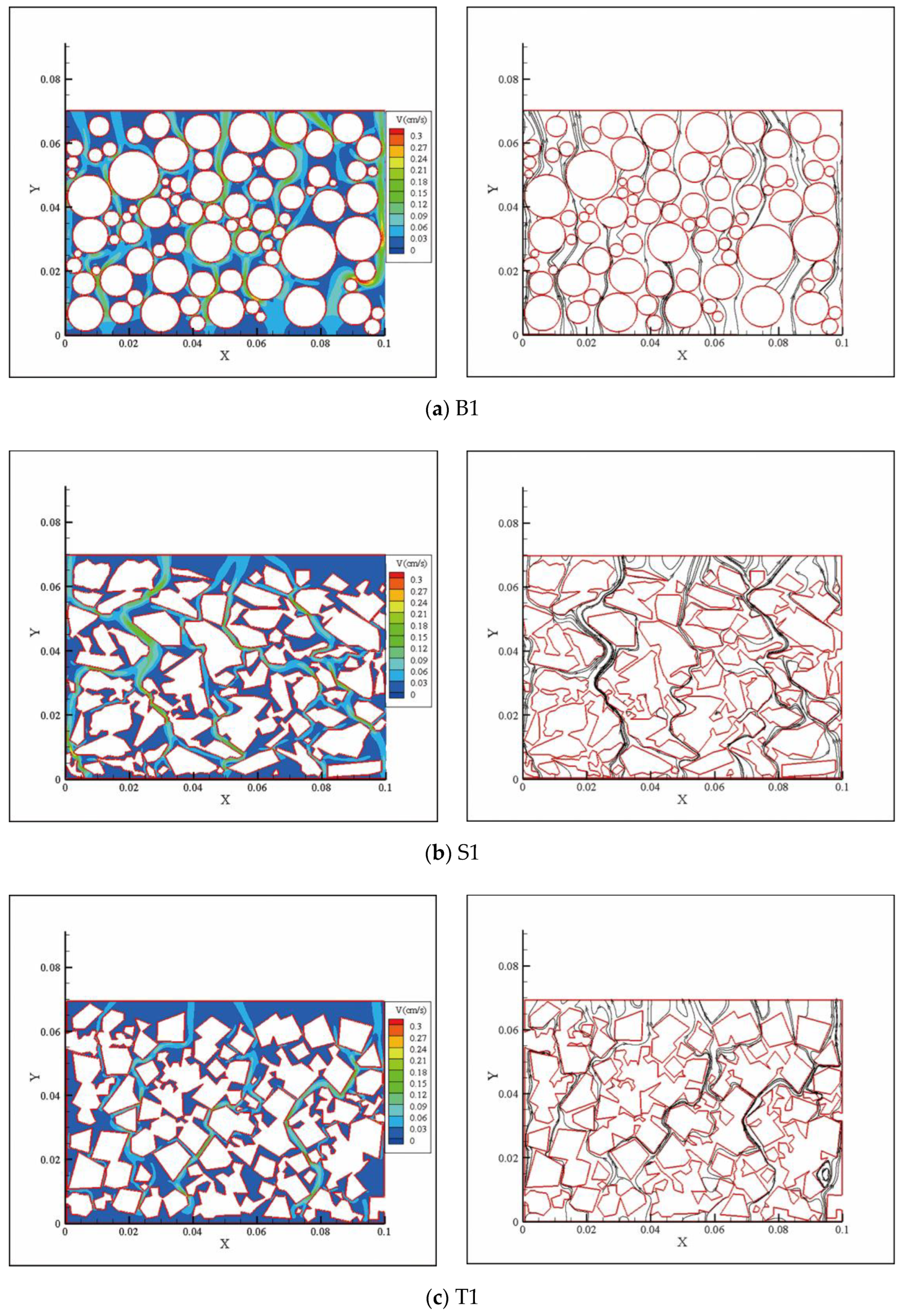
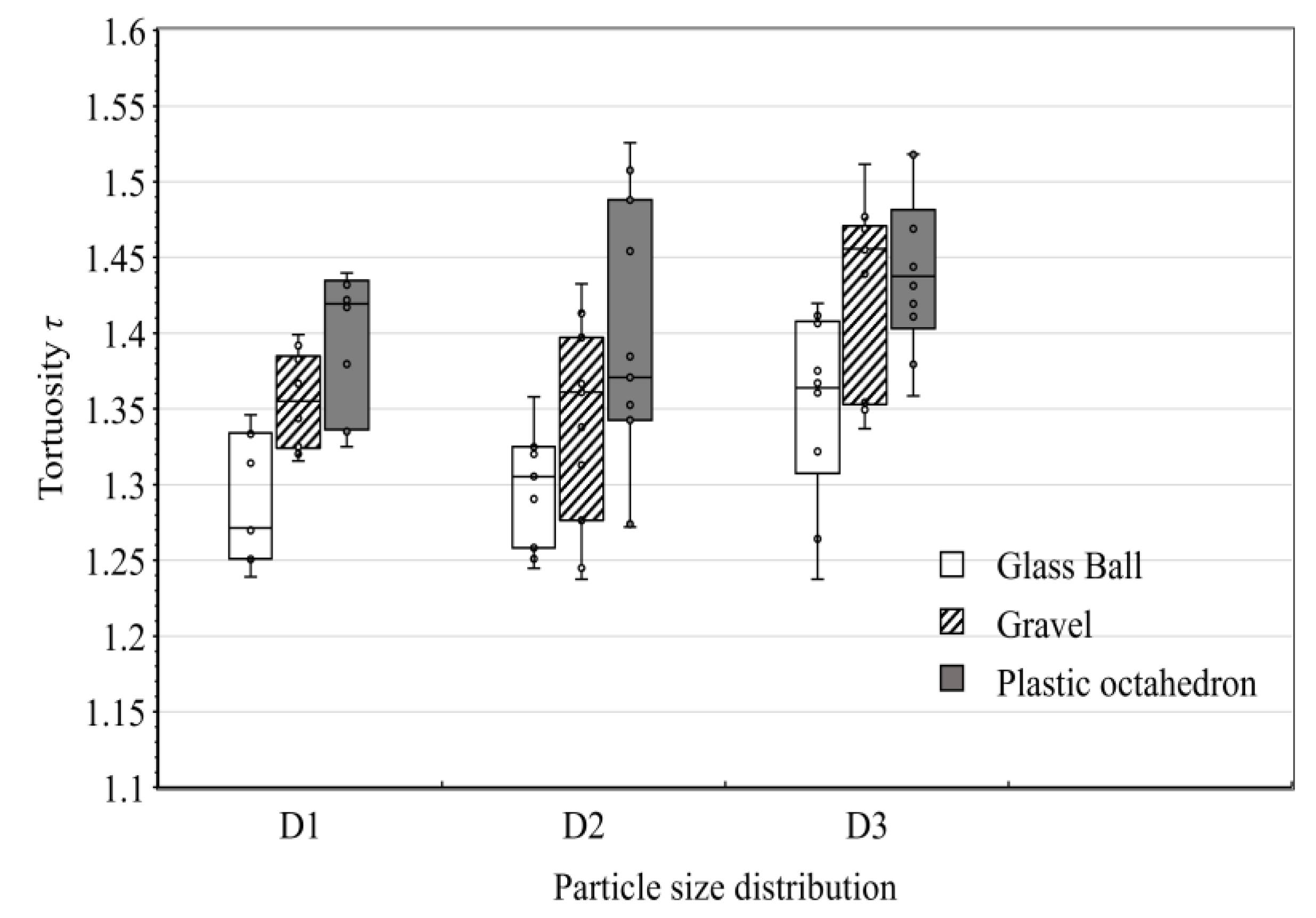
- A gravel pack with a larger aspect ratio and smaller roundness had a smaller hydraulic conductivity. This was because the CT scanning results showed that the larger the aspect ratio and the smaller the roundness, the more contact points and contact relationships there were between the particles in a gravel pack with a complex pore structure. This would increase the number, length, and tortuosity of the seepage channels when seepage occurs in such gravel packs in a two-dimensional simulation seepage field.
- In addition to allowing the particle size distribution and dry density to meet the requirements of the dam design specifications, the filter material should preferentially use blasting gravel with a larger aspect ratio and a smaller roundness for better anti-seepage performance.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Warren, A.L. Investigation of Dam Incidents and Failures. Forensic Eng. 2011, 164, 33–41. [Google Scholar] [CrossRef]
- Bear, J. Modeling Flow and Contaminant Transport in Fractured Rocks. Flow Contam. Transp. Fract. Rock 1993, 1–37. [Google Scholar] [CrossRef]
- Zhang, J.F.; Ding, P.Z.; Zhang, W.; Hu, Z.J. Studies of Mechanism for Transition Zone to Control Seepage Field in Concrete Faced Rockfill Dam. Rock Soil Mech. 2011, 32, 3544–3548. [Google Scholar]
- Hazen, A. Discussion of Dams on Sand Foundation by A.C. Transp. ASAE 1911, 73, 199–203. [Google Scholar]
- Kozeny, J. Unber Kapillare Leitung Des Wassers Im Boden. Sitz. Akad. Wiss WIEN 1927, 136, 271–306. [Google Scholar]
- Carman, P.C. Permeability of Saturated Sands, Soils and Clays. J. Agric. Sci. 1939, 29, 262–273. [Google Scholar] [CrossRef]
- Terzaghi, K.; Peck, R.B.; Mesri, G. Soil Mechanics in Engineering Practice. Available online: https://www.wiley.com/en-us/Soil+Mechanics+in+Engineering+Practice%2C+3rd+Edition-p-9780471086581 (accessed on 8 June 2022).
- Sanford, W.E.; Steenhuis, T.S.; Parlange, J.-Y.; Surface, J.M.; Peverly, J.H. Hydraulic Conductivity of Gravel and Sand as Substrates in Rock-Reed Filters. Ecol. Eng. 1995, 4, 321–336. [Google Scholar] [CrossRef]
- Xu, S.; Zhu, Y.; Cai, Y.; Sun, H.; Cao, H.; Shi, J. Predicting the Permeability Coefficient of Polydispersed Sand via Coupled CFD–DEM Simulations. Comput. Geotech. 2022, 144, 104634. [Google Scholar] [CrossRef]
- Sanchez Lizarraga, H.; Lai, C.G. Effects of Spatial Variability of Soil Properties on the Seismic Response of an Embankment Dam. Soil Dyn. Earthq. Eng. 2014, 64, 113–128. [Google Scholar] [CrossRef]
- Chapuis, R.P.; Aubertin, M. On the Use of the Kozeny-Carman Equation to Predict the Hydraulic Conductivity of Soils. Can. Geotech. J. 2003, 40, 616–628. [Google Scholar] [CrossRef]
- Chapuis, R.P.; Dallaire, V.; Marcotte, D.; Chouteau, M.; Acevedo, N.; Gagnon, F. Evaluating the Hydraulic Conductivity at Three Different Scales within an Unconfined Sand Aquifer at Lachenaie, Quebec. Can. Geotech. J. 2005, 42, 1212–1220. [Google Scholar] [CrossRef]
- Xu, P.; Yu, B. Developing a New Form of Permeability and Kozeny–Carman Constant for Homogeneous Porous Media by Means of Fractal Geometry. Adv. Water Resour. 2008, 31, 74–81. [Google Scholar] [CrossRef]
- Henderson, N.; Brêttas, J.C.; Sacco, W.F. A Three-Parameter Kozeny–Carman Generalized Equation for Fractal Porous Media. Chem. Eng. Sci. 2010, 65, 4432–4442. [Google Scholar] [CrossRef]
- Schulz, R.; Ray, N.; Zech, S.; Rupp, A.; Knabner, P. Beyond Kozeny–Carman: Predicting the Permeability in Porous Media. Transp. Porous Media 2019, 130, 487–512. [Google Scholar] [CrossRef]
- Safari, M.; Gholami, R.; Jami, M.; Ananthan, M.A.; Rahimi, A.; Khur, W.S. Developing a Porosity-Permeability Relationship for Ellipsoidal Grains: A Correction Shape Factor for Kozeny-Carman’s Equation. J. Pet. Sci. Eng. 2021, 205, 108896. [Google Scholar] [CrossRef]
- Stewart, M.L.; Ward, A.L.; Rector, D.R. A Study of Pore Geometry Effects on Anisotropy in Hydraulic Permeability Using the Lattice-Boltzmann Method. Adv. Water Resour. 2006, 29, 1328–1340. [Google Scholar] [CrossRef]
- Garcia, X.; Akanji, L.T.; Blunt, M.J.; Matthai, S.K.; Latham, J.P. Numerical Study of the Effects of Particle Shape and Polydispersity on Permeability. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2009, 80, 021304. [Google Scholar] [CrossRef]
- Côté, J.; Fillion, M.-H.; Konrad, J.-M. Estimating Hydraulic and Thermal Conductivities of Crushed Granite Using Porosity and Equivalent Particle Size. J. Geotech. Geoenvironmental Eng. 2011, 137, 834–842. [Google Scholar] [CrossRef]
- Belkhatir, M.; Schanz, T.; Arab, A. Effect of Fines Content and Void Ratio on the Saturated Hydraulic Conductivity and Undrained Shear Strength of Sand-Silt Mixtures. Environ. Earth Sci. 2013, 70, 2469–2479. [Google Scholar] [CrossRef]
- Su, L.J.; Zhang, Y.J.; Wang, T.X. Investigation on Permeability of Sands with Different Particle Sizes. Available online: https://www.researchgate.net/publication/288721987_Investigation_on_permeability_of_sands_with_different_particle_sizes (accessed on 8 June 2022).
- Zhang, J.F.; Ye, J.B.; Chen, J.S.; Li, S.L. A Preliminary Study of Measurement and Evaluation of Breakstone Grain Shape. Rock Soil Mech. 2016, 37, 343–349. [Google Scholar] [CrossRef]
- Duan, Y.; Feng, X.T.; Li, X.; Yang, B. Mesoscopic Damage Mechanism and a Constitutive Model of Shale Using In-Situ X-Ray CT Device. Eng. Fract. Mech. 2022, 269, 108576. [Google Scholar] [CrossRef]
- Kaut, H.; Singh, R. A Review on Image Segmentation Techniques for Future Research Study. Int. J. Eng. Trends Technol. 2016, 35, 504–505. [Google Scholar] [CrossRef]
- Guo, D.; Zhang, G.; Peng, H.; Yuan, J.; Paul, P.; Fu, K.; Zhu, M. Segmentation and Measurements of Carotid Intima-Media Thickness in Ultrasound Images Using the Improved Convolutional Neural Network and Support Vector Machine. J. Med. Imaging Health Inform. 2020, 11, 15–24. [Google Scholar] [CrossRef]
- Halder, A.; Chatterjee, S.; Dey, D.; Kole, S.; Munshi, S. An Adaptive Morphology Based Segmentation Technique for Lung Nodule Detection in Thoracic CT Image. Comput. Methods Programs Biomed. 2020, 197, 105720. [Google Scholar] [CrossRef] [PubMed]
- Sabzi, M.; Dezfuli, S.M. Post Weld Heat Treatment of Hypereutectoid Hadfield Steel: Characterization and Control of Microstructure, Phase Equilibrium, Mechanical Properties and Fracture Mode of Welding Joint. J. Manuf. Processes 2018, 34, 313–328. [Google Scholar] [CrossRef]
- Sabzi, M.; Mousavi Anijdan, S.H.; Chalandar, A.R.B.; Park, N.; Jafarian, H.R.; Eivani, A.R. An Experimental Investigation on the Effect of Gas Tungsten Arc Welding Current Modes upon the Microstructure, Mechanical, and Fractography Properties of Welded Joints of Two Grades of AISI 316L and AISI310S Alloy Metal Sheets. Mater. Sci. Eng. A 2022, 840, 142877. [Google Scholar] [CrossRef]
- Mousavi Anijdan, S.H.; Sabzi, M.; Najafi, H.; Jafari, M.; Eivani, A.R.; Park, N.; Jafarian, H.R. The Influence of Aluminum on Microstructure, Mechanical Properties and Wear Performance of Fe–14%Mn–1.05%C Manganese Steel. J. Mater. Res. Technol. 2021, 15, 4768–4780. [Google Scholar] [CrossRef]
- Mandelbrot, B.B. The Fractal Geometry of Nature; W.H. Freeman and Company: San Francisco, CA, USA, 1982. [Google Scholar]
- Nie, B.; Wang, K.; Fan, Y.; Zhao, J.; Zhang, L.; Ju, Y.; Ge, Z. Small Angle X-ray Scattering Test of Hami Coal Sample Nanostructure Parameters with Gas Adsorbed Under Different Pressures. J. Nanosci. Nanotechnol. 2021, 21, 538–546. [Google Scholar] [CrossRef]
- Xiaoqin, S.; Dongli, S.; Yuanhang, F.; Hongde, W.; Lei, G. Three-Dimensional Fractal Characteristics of Soil Pore Structure and Their Relationships with Hydraulic Parameters in Biochar-Amended Saline Soil. Soil Tillage Res. 2021, 205, 104809. [Google Scholar] [CrossRef]
- Ojeda-Magaña, B.; Ruelas, R.; Quintanilla-Domínguez, J.; Robledo-Hernández, J.G.; Sturrock, C.J.; Mooney, S.J.; Tarquis, A.M. Detection and Quantification of Pore, Solid and Gravel Spaces in CT Images of a 3D Soil Sample. Appl. Math. Model. 2020, 85, 360–377. [Google Scholar] [CrossRef]
- Ahmadi, M.; Madadi, M.; Disfani, M.; Shire, T.; Narsilio, G. Reconstructing the Microstructure of Real Gap-Graded Soils in DEM: Application to Internal Instability. Powder Technol. 2021, 394, 504–522. [Google Scholar] [CrossRef]
- Wang, J.; Guo, L.; Bai, Z.; Yang, L. Using Computed Tomography (CT) Images and Multi-Fractal Theory to Quantify the Pore Distribution of Reconstructed Soils during Ecological Restoration in Opencast Coal-Mine. Ecol. Eng. 2016, 92, 148–157. [Google Scholar] [CrossRef]
- Blott, S.J.; Pye, K. Particle Shape: A Review and New Methods of Characterization and Classification. Sedimentology 2008, 55, 31–63. [Google Scholar] [CrossRef]
- Wadell, H. Volume, Shape, and Roundness of Quartz Particles. J. Geol. 1935, 43, 250–280. [Google Scholar] [CrossRef]
- Wadell, H. Sphericity and Roundness of Rock Particles. J. Geol. 1933, 41, 310–331. [Google Scholar] [CrossRef]
- Wadell, H. Volume, Shape, and Roundness of Rock Particles. J. Geol. 1932, 40, 443–451. [Google Scholar] [CrossRef]
- Sneed, E.D.; Folk, R.L. Pebbles in the Lower Colorado River, Texas a Study in Particle Morphogenesis. J. Geol. 2015, 66, 114–150. [Google Scholar] [CrossRef]
- Hentschel, M.L.; Page, N.W. Selection of Descriptors for Particle Shape Characterization. Part. Part. Syst. Charact. 2003, 20, 25–38. [Google Scholar] [CrossRef]
- Landauer, J.; Kuhn, M.; Nasato, D.S.; Foerst, P.; Briesen, H. Particle Shape Matters—Using 3D Printed Particles to Investigate Fundamental Particle and Packing Properties. Powder Technol. 2020, 361, 711–718. [Google Scholar] [CrossRef]
- Touiti, L.; Kim, T.; Jung, Y.H. Analysis of Calcareous Sand Particle Shape Using Fourier Descriptor Analysis. Int. J. Geo-Eng. 2020, 11, 15. [Google Scholar] [CrossRef]
- Xiong, Y.; Long, X.; Huang, G.; Furman, A. Impact of Pore Structure and Morphology on Flow and Transport Characteristics in Randomly Repacked Grains with Different Angularities. Soils Found. 2019, 59, 1992–2006. [Google Scholar] [CrossRef]
- Mir, B.A. Manual of Geotechnical Laboratory Soil Testing, 1st ed.; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar] [CrossRef]
- Rieck, K.; Sonnenburg, S.; Mika, S.; Schäfer, C.; Laskov, P.; Tax, D.; Müller, K.-R. Support Vector Machines. In Handbook of Computational Statistics; Springer: Berlin/Heidelberg, Germany, 2012; pp. 883–926. [Google Scholar] [CrossRef]
- Vapnik, V.N. An Overview of Statistical Learning Theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef] [PubMed]
- Jiang, L.; Yao, R. Modelling Personal Thermal Sensations Using C-Support Vector Classification (C-SVC) Algorithm. Build. Environ. 2016, 99, 98–106. [Google Scholar] [CrossRef]
- Ballester, C.; Bertalmio, M.; Caselles, V.; Sapiro, G.; Verdera, J. Filling-in by Joint Interpolation of Vector Fields and Gray Levels. IEEE Trans. Image Process. 2001, 10, 1200–1211. [Google Scholar] [CrossRef] [PubMed]
- Liebovitch, L.S.; Toth, T. A Fast Algorithm to Determine Fractal Dimensions by Box Counting. Phys. Lett. A 1989, 141, 386–390. [Google Scholar] [CrossRef]
- Kadapa, C.; Dettmer, W.G.; Perić, D. Accurate Iteration-Free Mixed-Stabilised Formulation for Laminar Incompressible Navier–Stokes: Applications to Fluid–Structure Interaction. J. Fluids Struct. 2020, 97, 103077. [Google Scholar] [CrossRef]
- Shekhar, S.; Xiong, H. Root-Mean-Square Error. In Encyclopedia of GIS.; Springer: Boston, MA, USA, 2008; p. 979. [Google Scholar] [CrossRef]
- Nahler, G. Pearson Correlation Coefficient; Springer: Vienna, Austria, 2009; Volume 1025. [Google Scholar]
- Nash, J.E.; Sutcliffe, J.V. River Flow Forecasting through Conceptual Models Part I—A Discussion of Principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Parvati, K.; Prakasa Rao, B.S.; Mariya Das, M. Image Segmentation Using Gray-Scale Morphology and Marker-Controlled Watershed Transformation. Discret. Dyn. Nat. Soc. 2008, 2008, 384346. [Google Scholar] [CrossRef]
- Sezgin, M. Survey over Image Thresholding Techniques and Quantitative Performance Evaluation. J. Electron. Imaging 2004, 13, 146–168. [Google Scholar] [CrossRef]
- Li, X.; Wei, W.; Wang, L.; Ding, P.; Zhu, L.; Cai, J. A New Method for Evaluating the Pore Structure Complexity of Digital Rocks Based on the Relative Value of Fractal Dimension. Mar. Pet. Geol. 2022, 141, 105694. [Google Scholar] [CrossRef]
- Wang, X.; Dang, Z.; Hou, S.; Yuan, Y.; Wang, X.; Pan, S. Fractal Characteristics of Pulverized High Volatile Bituminous Coals with Different Particle Size Using Gas Adsorption. Fuel 2022, 315, 122814. [Google Scholar] [CrossRef]
- Han, X.; Wang, B.; Feng, J. Relationship between Fractal Feature and Compressive Strength of Concrete Based on MIP. Constr. Build. Mater. 2022, 322, 126504. [Google Scholar] [CrossRef]
- Xiu, H.; Ma, F.; Li, J.; Zhao, X.; Liu, L.; Feng, P.; Yang, X.; Zhang, X.; Kozliak, E.; Ji, Y. Using Fractal Dimension and Shape Factors to Characterize the Microcrystalline Cellulose (MCC) Particle Morphology and Powder Flowability. Powder Technol. 2020, 364, 241–250. [Google Scholar] [CrossRef]
- Ari, A.; Akbulut, S. Effect of Fractal Dimension on Sand-Geosynthetic Interface Shear Strength. Powder Technol. 2022, 401, 117349. [Google Scholar] [CrossRef]
- Nomura, S.; Yamamoto, Y.; Sakaguchi, H. Modified Expression of Kozeny–Carman Equation Based on Semilog–Sigmoid Function. Soils Found. 2018, 58, 1350–1357. [Google Scholar] [CrossRef]
- Xiao, B.; Wang, W.; Zhang, X.; Long, G.; Fan, J.; Chen, H.; Deng, L. A Novel Fractal Solution for Permeability and Kozeny-Carman Constant of Fibrous Porous Media Made up of Solid Particles and Porous Fibers. Powder Technol. 2019, 349, 92–98. [Google Scholar] [CrossRef]
- Yin, P.; Song, H.; Ma, H.; Yang, W.; He, Z.; Zhu, X. The Modification of the Kozeny-Carman Equation through the Lattice Boltzmann Simulation and Experimental Verification. J. Hydrol. 2022, 609, 127738. [Google Scholar] [CrossRef]
- Zakhari, M.E.A.; Anderson, P.D.; Hütter, M. Modeling the Shape Dynamics of Suspensions of Permeable Ellipsoidal Particles. J. Non-Newton. Fluid Mech. 2018, 259, 23–31. [Google Scholar] [CrossRef]
- Liu, Y.F.; Jeng, D.S. Pore Scale Study of the Influence of Particle Geometry on Soil Permeability. Adv. Water Resour. 2019, 129, 232–249. [Google Scholar] [CrossRef]
- Conzelmann, N.A.; Partl, M.N.; Clemens, F.J.; Müller, C.R.; Poulikakos, L.D. Effect of Artificial Aggregate Shapes on the Porosity, Tortuosity and Permeability of Their Packings. Powder Technol. 2022, 397, 117019. [Google Scholar] [CrossRef]
- Li, M.; Chen, H.; Li, X.; Liu, L.; Lin, J. Permeability of Granular Media Considering the Effect of Grain Composition on Tortuosity. Int. J. Eng. Sci. 2022, 174, 103658. [Google Scholar] [CrossRef]
- Steiakakis, E.; Gamvroudis, C.; Alevizos, G. Kozeny-Carman Equation and Hydraulic Conductivity of Compacted Clayey Soils. Geomaterials 2012, 2, 37–41. [Google Scholar] [CrossRef]
- Wei, W.; Cai, J.; Xiao, J.; Meng, Q.; Xiao, B.; Han, Q. Kozeny-Carman Constant of Porous Media: Insights from Fractal-Capillary Imbibition Theory. Fuel 2018, 234, 1373–1379. [Google Scholar] [CrossRef]
- Kobayashi, I.; Owada, H.; Ishii, T.; Iizuka, A. Evaluation of Specific Surface Area of Bentonite-Engineered Barriers for Kozeny-Carman Law. Soils Found. 2017, 57, 683–697. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Number | Material | Name | Particle Size Distribution | Porosity |
|---|---|---|---|---|
| 1 | Glass ball | B1 | D1 | P1 |
| 2 | Gravel | S1 | ||
| 3 | Octahedron | O1 | ||
| 4 | Glass ball | B2 | D2 | P2 |
| 5 | Gravel | S2 | ||
| 6 | Octahedron | O2 | ||
| 7 | Glass ball | B3 | D3 | P3 |
| 8 | Gravel | S3 | ||
| 9 | Octahedron | O3 |
| Particle Size (mm) | Particle Size Distribution | |||
|---|---|---|---|---|
| D1 | D2 | D3 | ||
| Proportion (%) | 2~5 | 3 | 30 | 45 |
| 5~10 | 16 | 20 | 30 | |
| 10~20 | 81 | 50 | 25 | |
| Particle Size Distribution | Material | Name | φ (%) | αp | Sp |
|---|---|---|---|---|---|
| D1 | Glass ball | B1 | 38.81 | 1.00 | 1.000 |
| Gravel | S1 | 2.16 | 0.862 | ||
| Plastic octahedron particle | O1 | 4.67 | 0.720 | ||
| D2 | Glass ball | B2 | 32.29 | 1.00 | 1.000 |
| Gravel | S2 | 2.09 | 0.865 | ||
| Plastic octahedron particle | O2 | 4.67 | 0.720 | ||
| D3 | Glass ball | B3 | 31.22 | 1.00 | 1.000 |
| Gravel | S3 | 2.06 | 0.867 | ||
| Plastic octahedron particle | O3 | 4.67 | 0.720 |
| Test Number | V (cm3) | φsim (%) | φLab (%) | R (%) |
|---|---|---|---|---|
| B1 | 234.46 | 38.40 | 38.81 | 1.05 |
| S1 | 259.67 | 37.80 | 2.59 | |
| O1 | 212.85 | 38.74 | 0.19 | |
| B2 | 177.83 | 32.36 | 32.29 | 0.22 |
| S2 | 179.89 | 32.74 | 1.38 | |
| O2 | 184.25 | 33.53 | 3.84 | |
| B3 | 176.45 | 32.11 | 31.22 | 2.85 |
| S3 | 170.61 | 31.05 | 0.55 | |
| O3 | 174.20 | 31.70 | 1.54 |
| Test Number | RMSE | PCC | NSE |
|---|---|---|---|
| B1 | 0.000 | 1.000 | 1.000 |
| S1 | 0.322 | 0.998 | 0.839 |
| O1 | 0.139 | 1.000 | 0.998 |
| B2 | 0.173 | 0.998 | 0.980 |
| S2 | 0.020 | 1.000 | 1.000 |
| O2 | 0.043 | 1.000 | 1.000 |
| B3 | 0.269 | 1.000 | 0.974 |
| S3 | 0.069 | 1.000 | 0.999 |
| O3 | 0.054 | 1.000 | 1.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, J.; Shen, Z.; Zhang, J. Measuring the Effect of Pack Shape on Gravel’s Pore Characteristics and Permeability Using X-ray Diffraction Computed Tomography. Materials 2022, 15, 6173. https://doi.org/10.3390/ma15176173
Peng J, Shen Z, Zhang J. Measuring the Effect of Pack Shape on Gravel’s Pore Characteristics and Permeability Using X-ray Diffraction Computed Tomography. Materials. 2022; 15(17):6173. https://doi.org/10.3390/ma15176173
Chicago/Turabian StylePeng, Jiayi, Zhenzhong Shen, and Jiafa Zhang. 2022. "Measuring the Effect of Pack Shape on Gravel’s Pore Characteristics and Permeability Using X-ray Diffraction Computed Tomography" Materials 15, no. 17: 6173. https://doi.org/10.3390/ma15176173
APA StylePeng, J., Shen, Z., & Zhang, J. (2022). Measuring the Effect of Pack Shape on Gravel’s Pore Characteristics and Permeability Using X-ray Diffraction Computed Tomography. Materials, 15(17), 6173. https://doi.org/10.3390/ma15176173