
An InSAR Interferogram Filtering Method Based on Multi-Level Feature Fusion CNN


 ,
,
Abstract
:1. Introduction
2. Methods
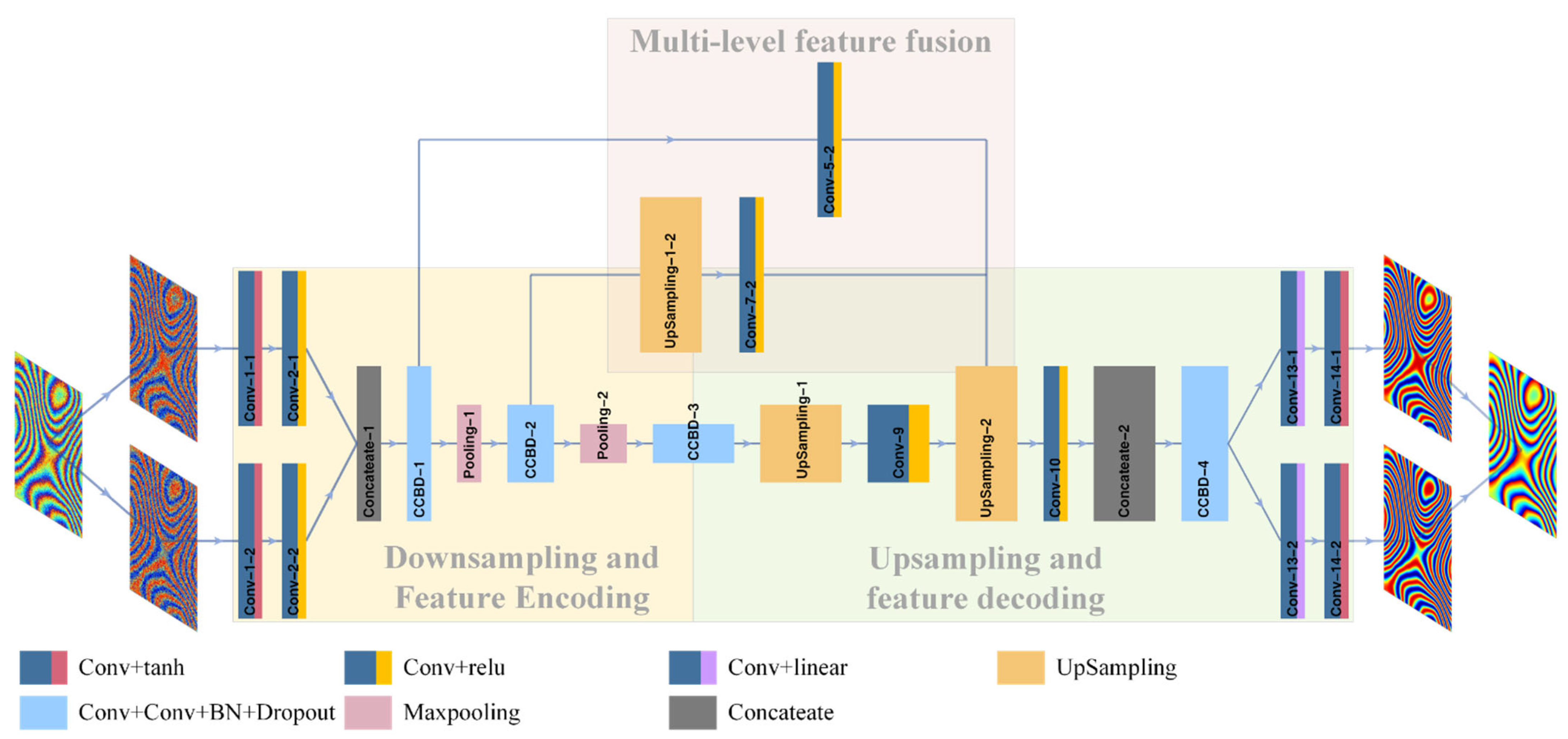
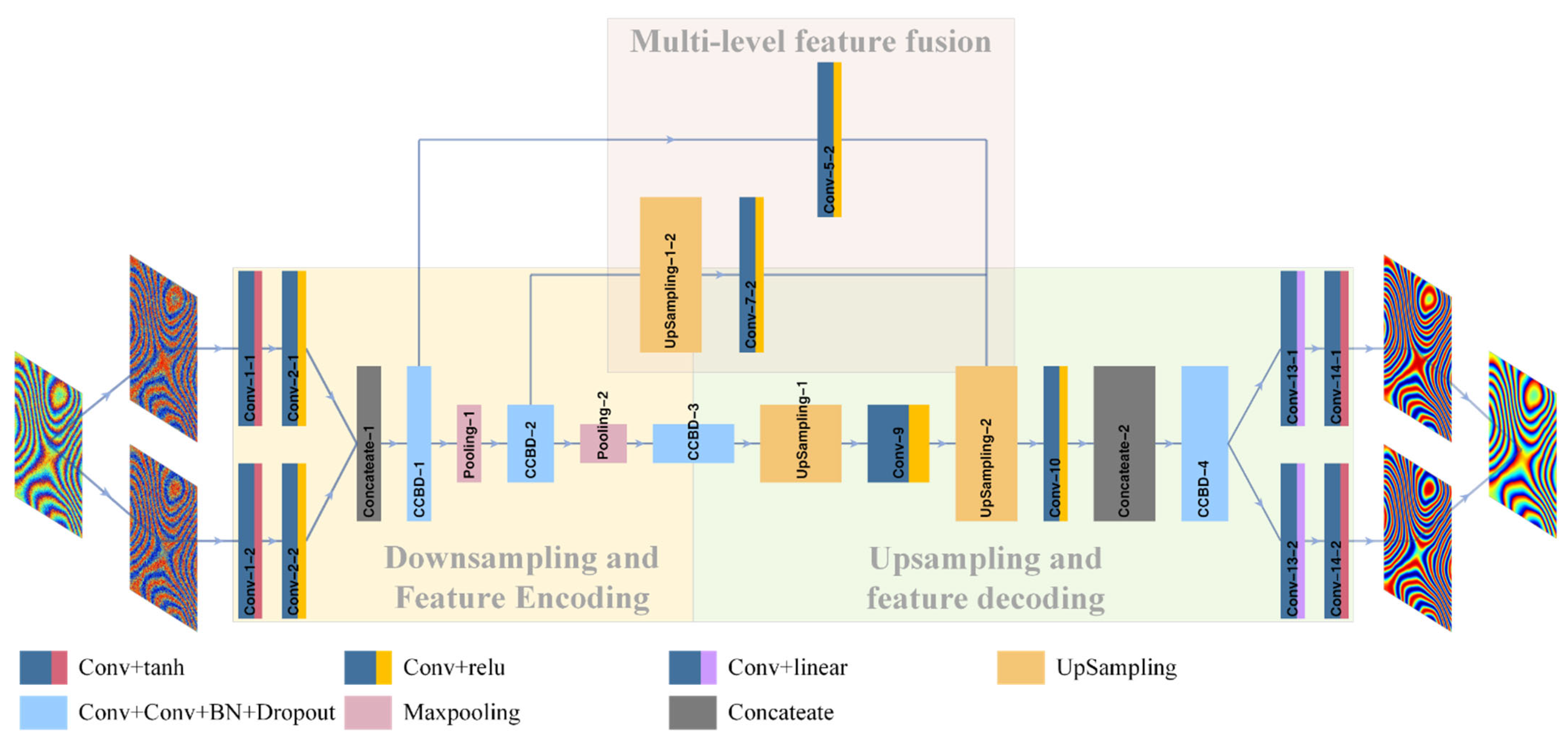
2.1. Proposed Model Network Architecture
2.1.1. Downsampling and Feature Encoding
2.1.2. Upsampling and Multi-Level Feature Fusion
2.1.3. Image Reconstruction and Generation
2.2. Model Training
3. Results
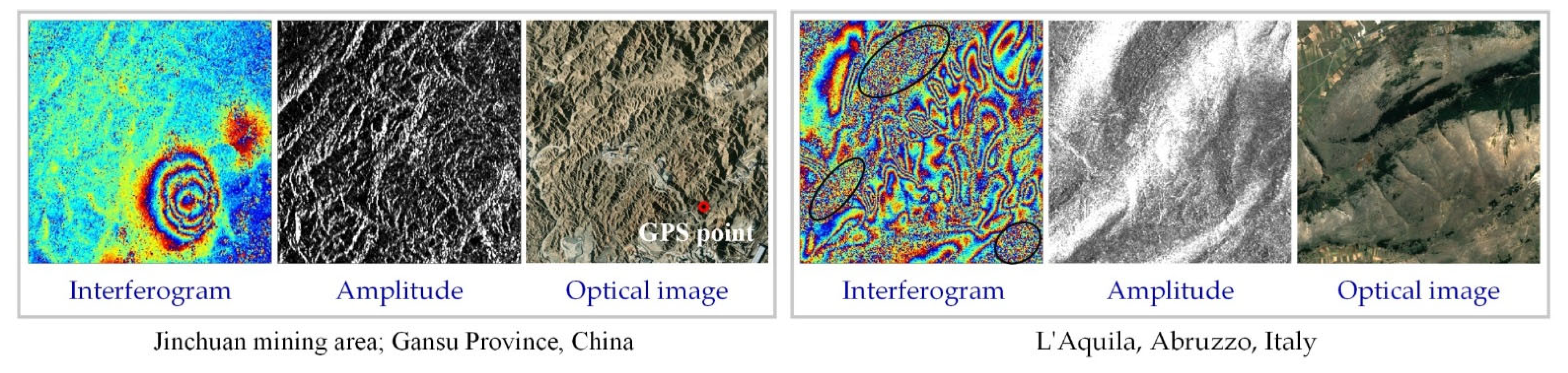
3.1. Experimental Data Set
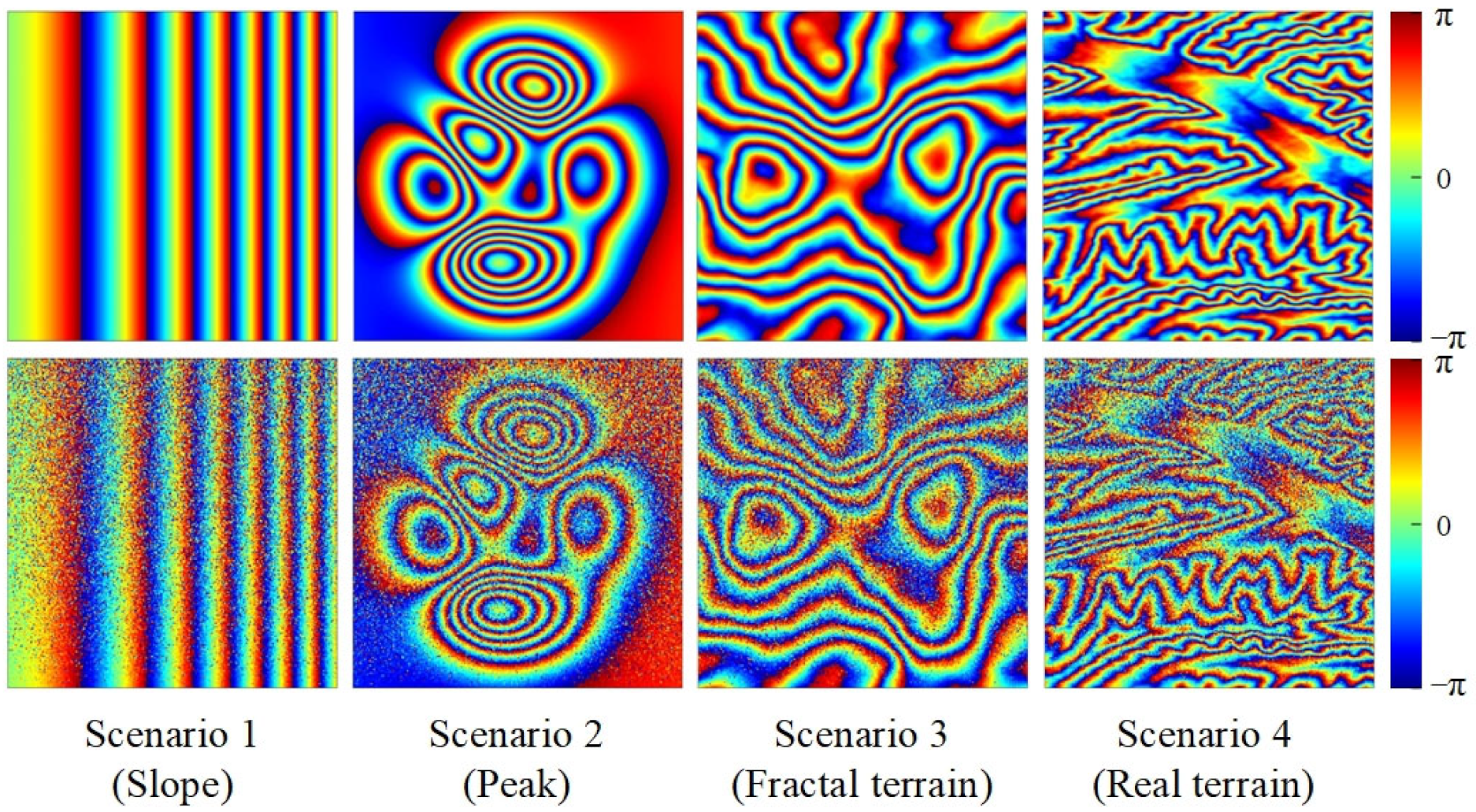
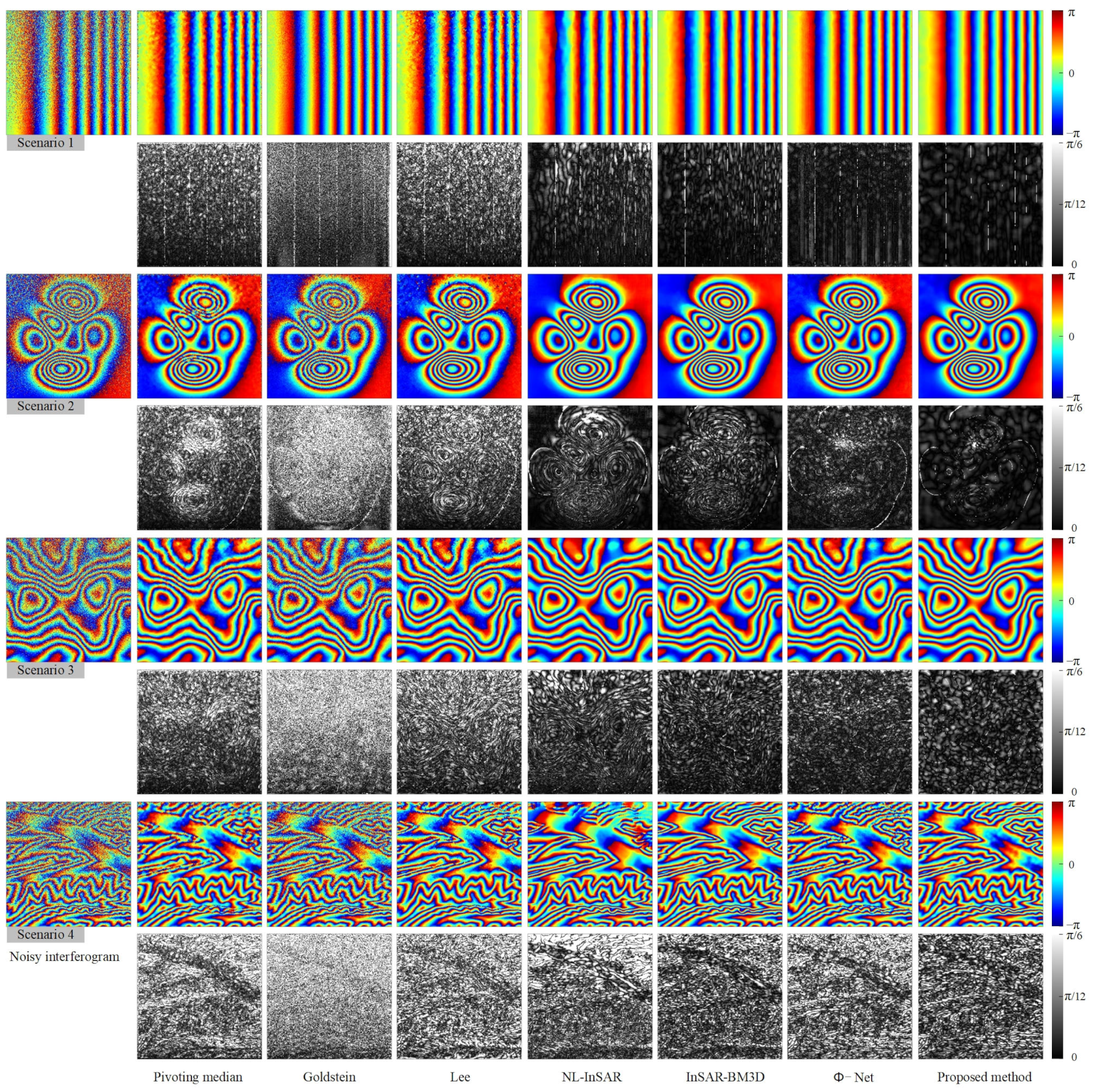
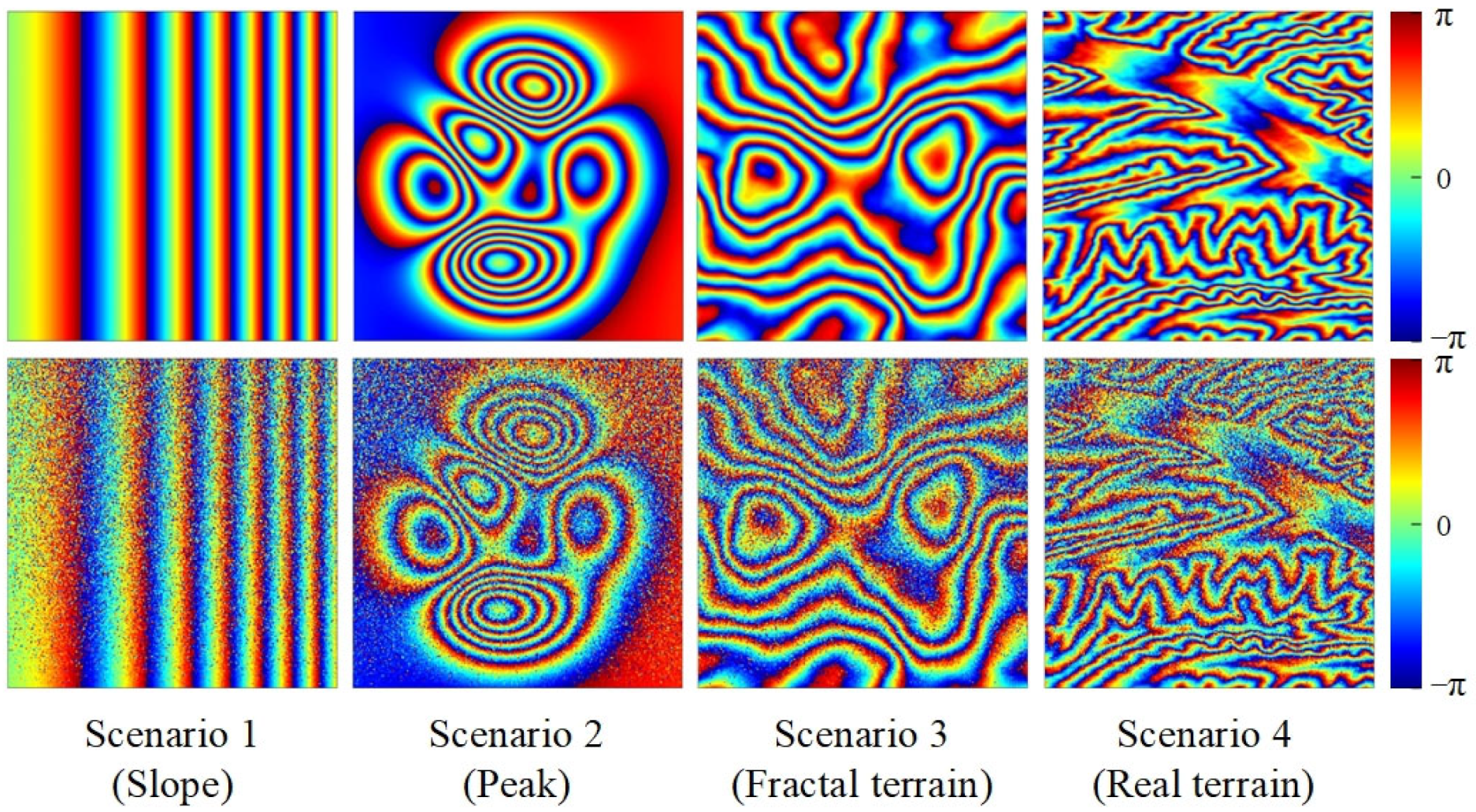
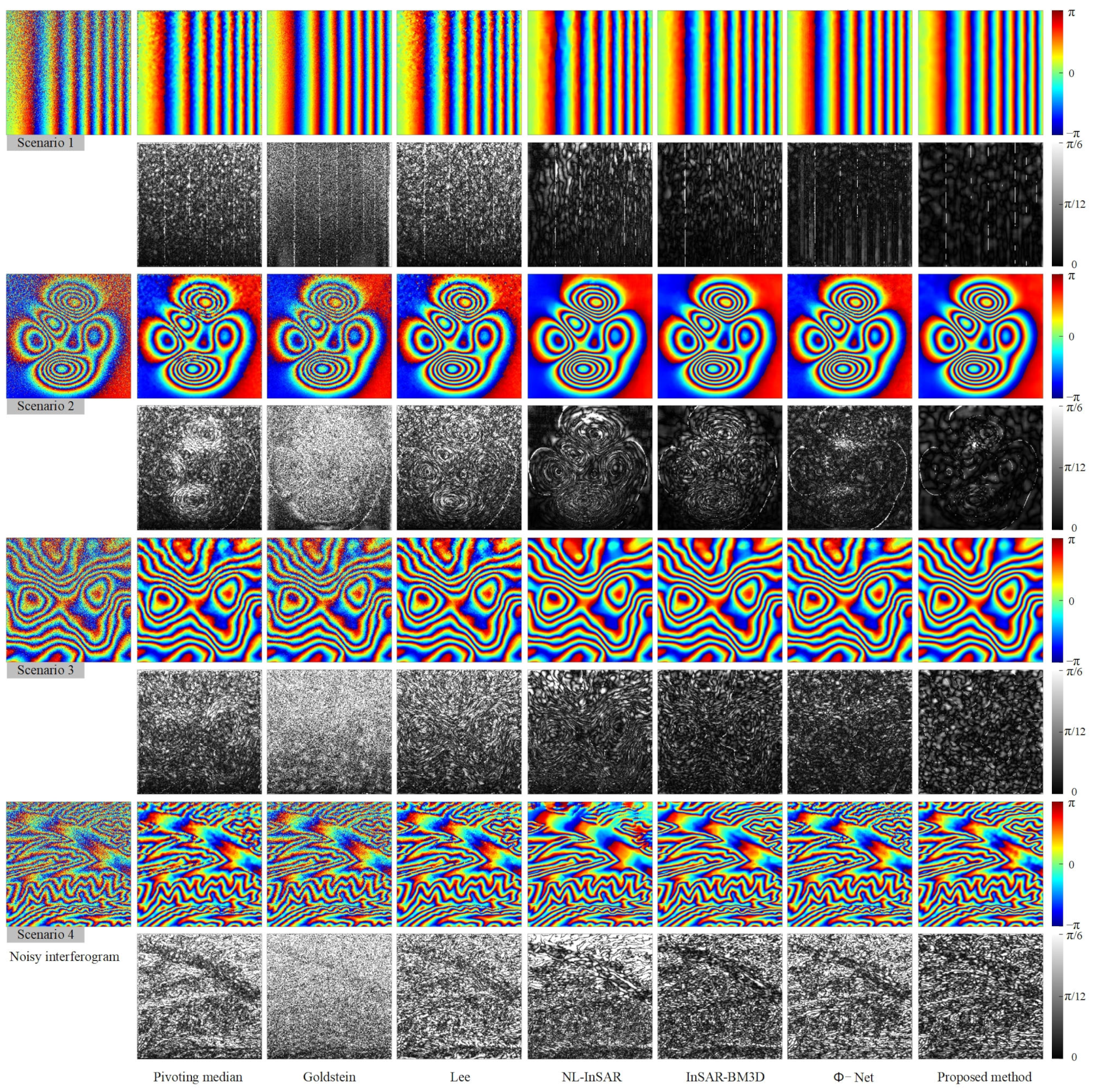
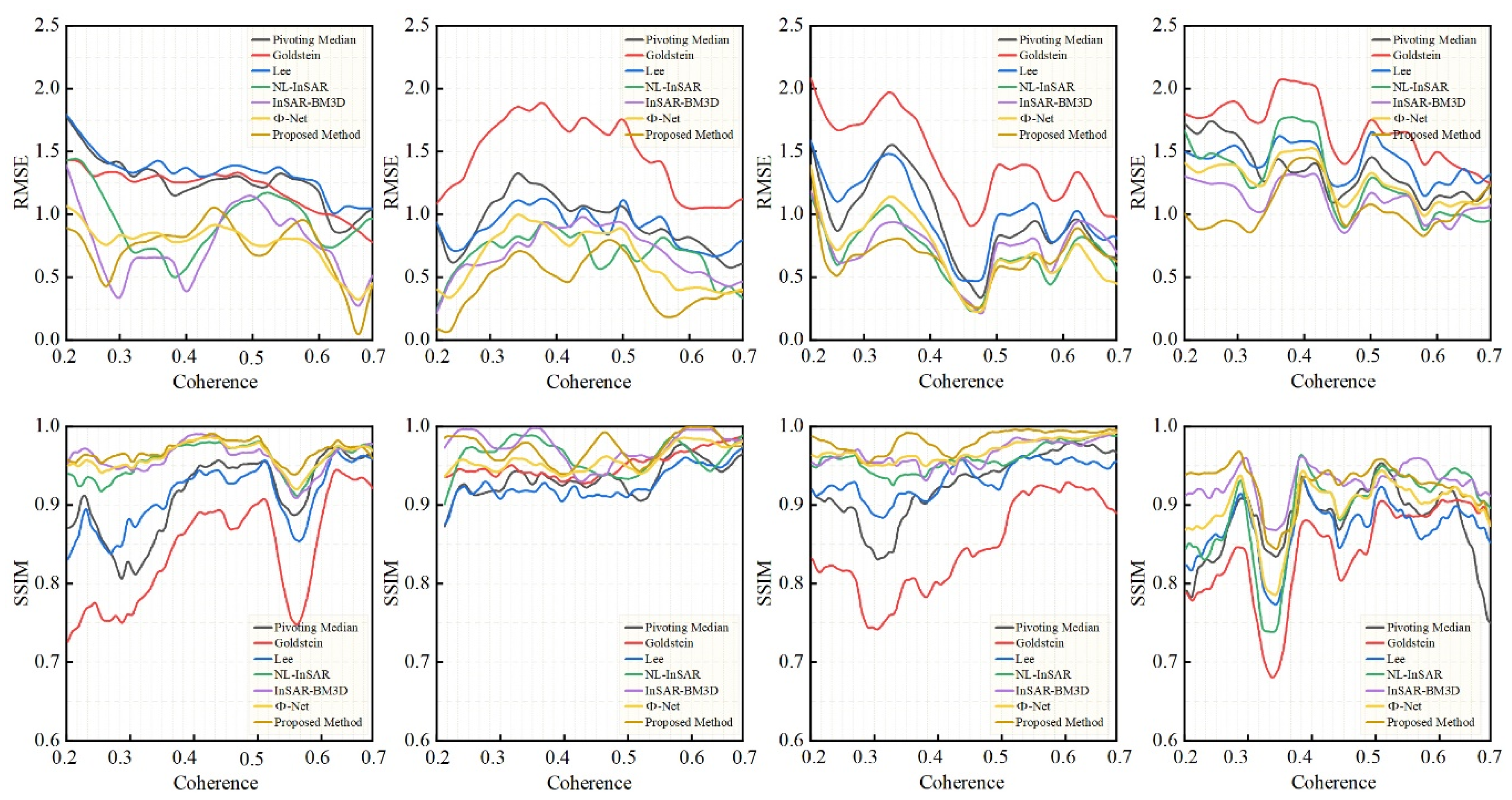
3.2. Experiment Using Simulated Data
- Scenario 1 (Slope): the interferogram was generated from simulated terrain of varying gradient, with fringes spacing from 50 to 24 pixels.
- Scenario 2 (Peak): a mountain-like interferogram was generated by summing Gaussian surfaces with different means and variances.
- Scenario 3 (Fractal terrain): the interferogram was generated from random topography using fractal mathematics.
- Scenario 4 (Real terrain): the interferogram was synthesized using a real DEM, which was randomly cropped from a 30 resolution SRTM DEM of China.
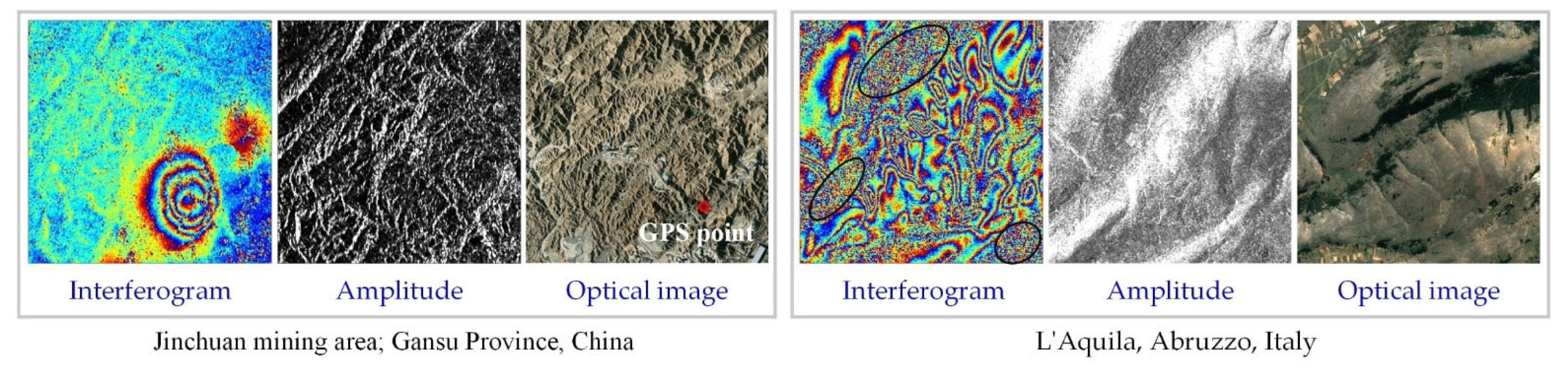
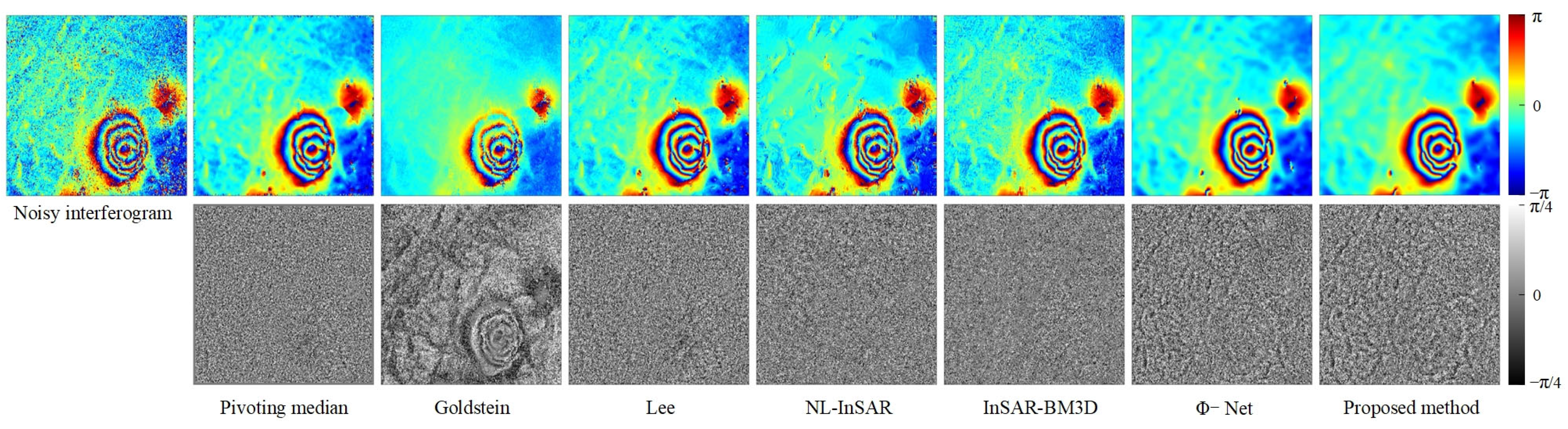
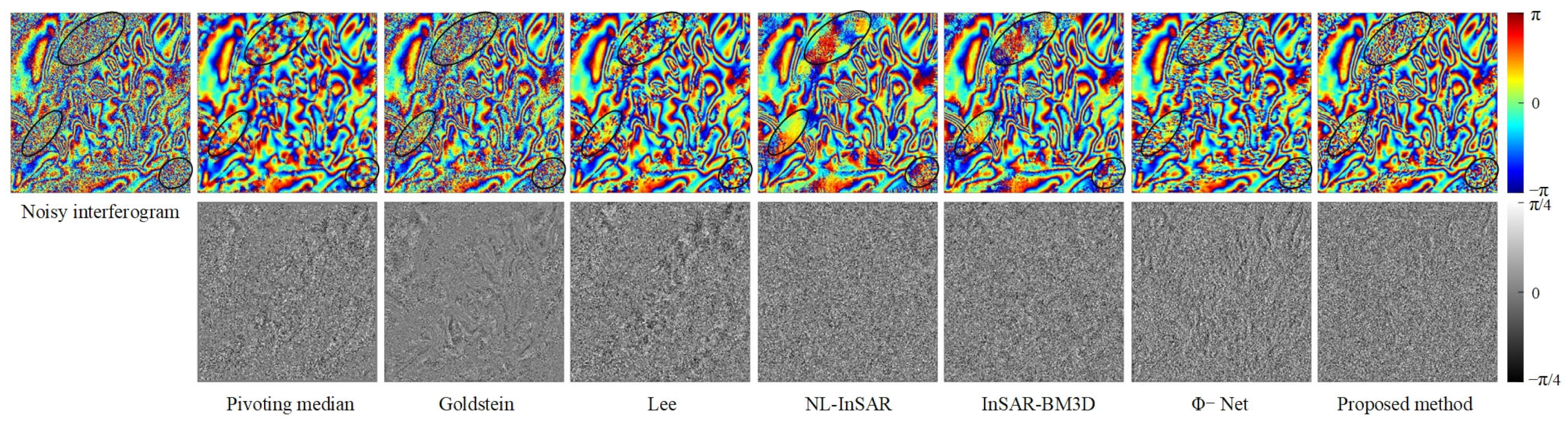
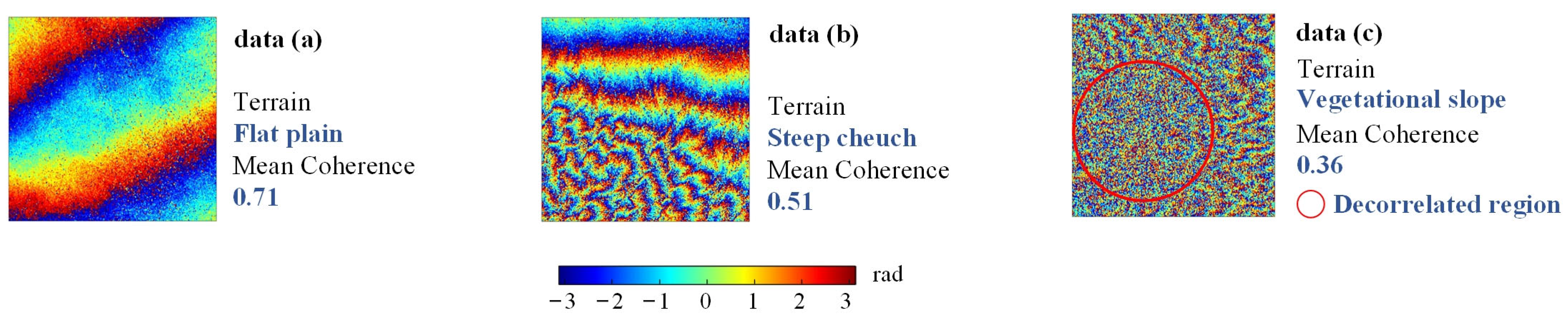
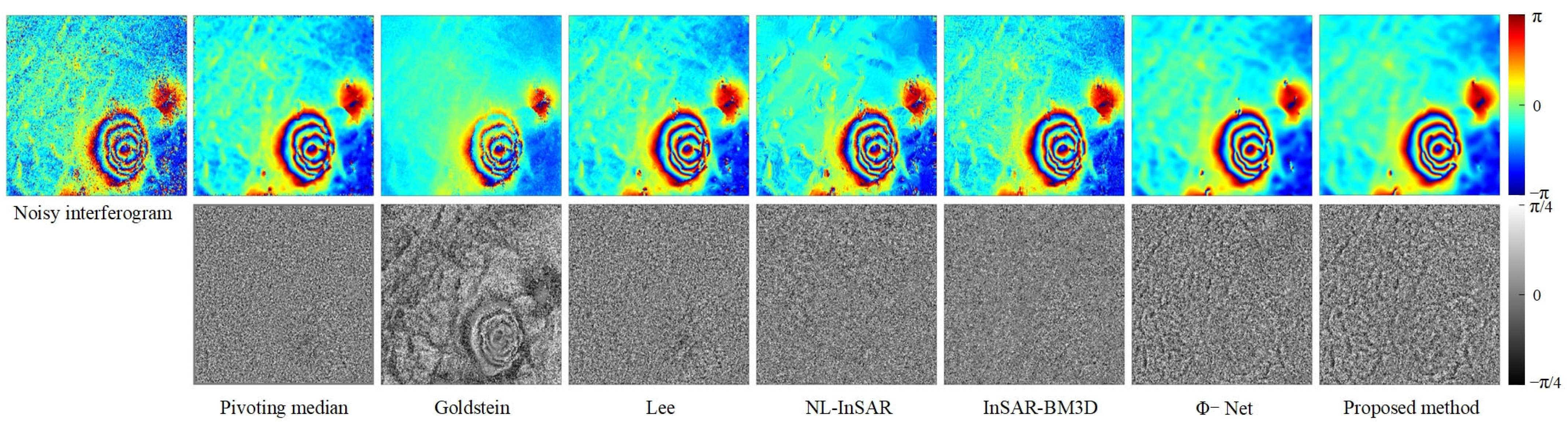
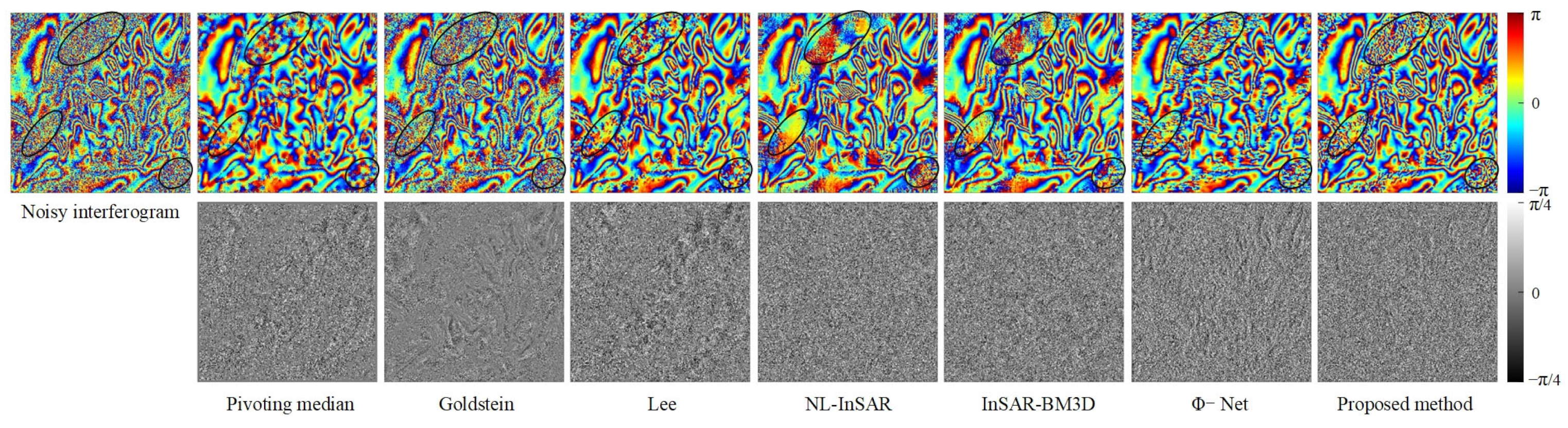
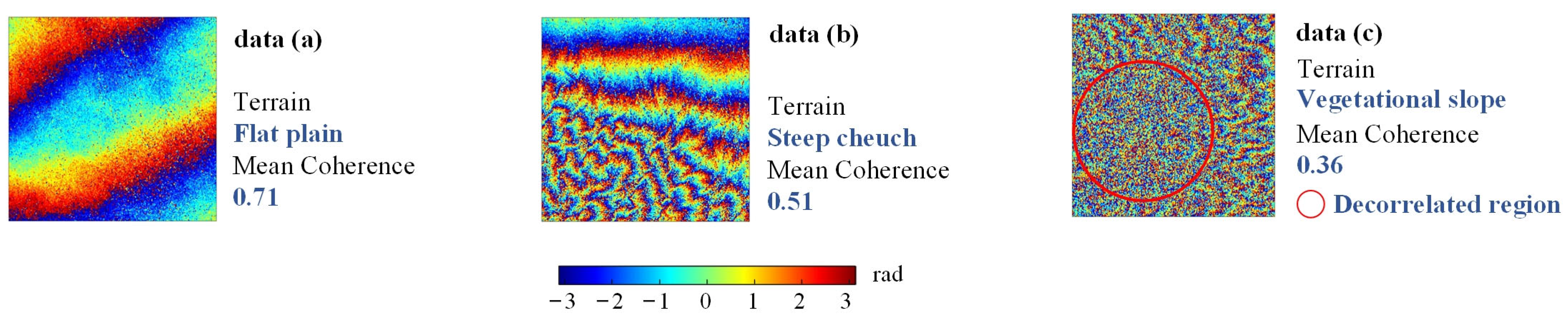
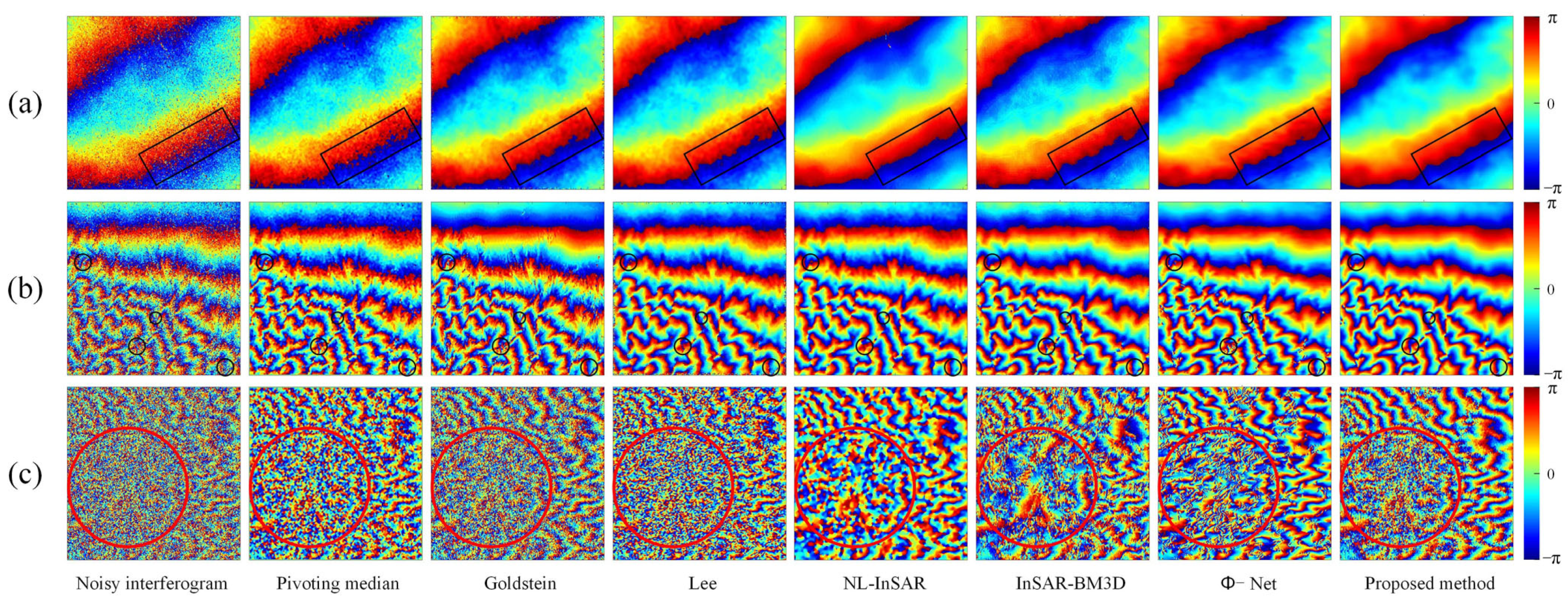
3.3. Experiment Using Real Data
4. Discussion
4.1. Performance Robustness of the Model to Coherence in Real Data
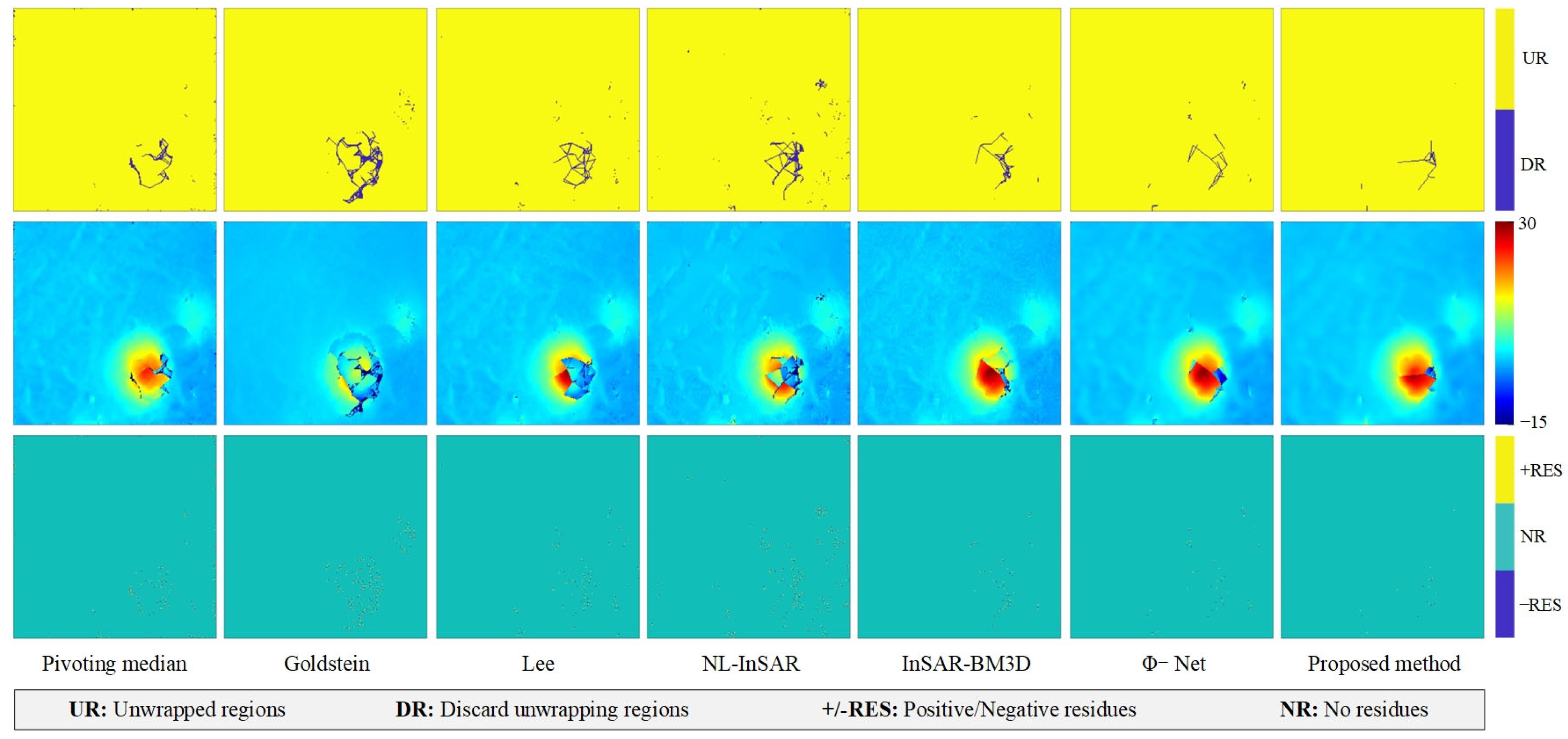
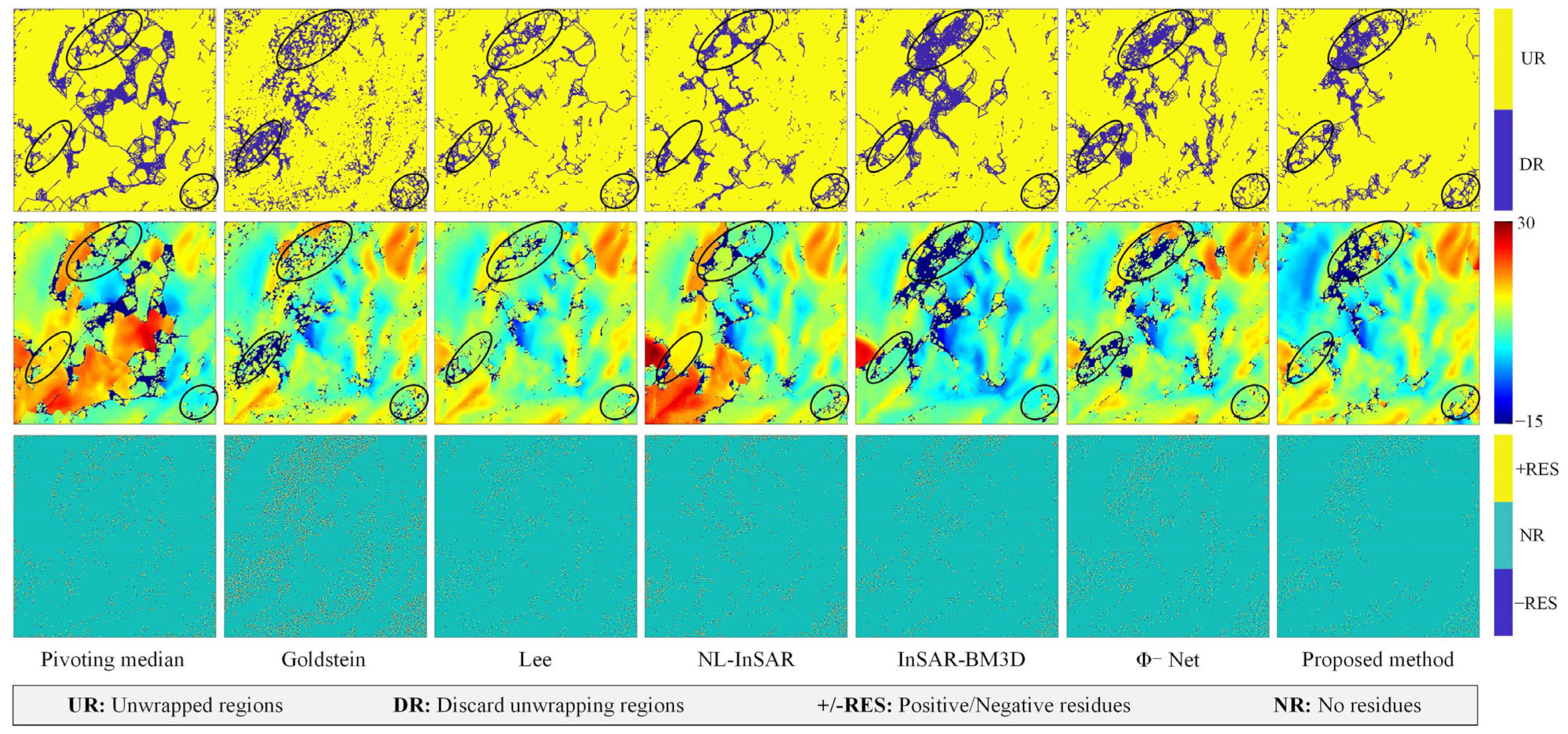
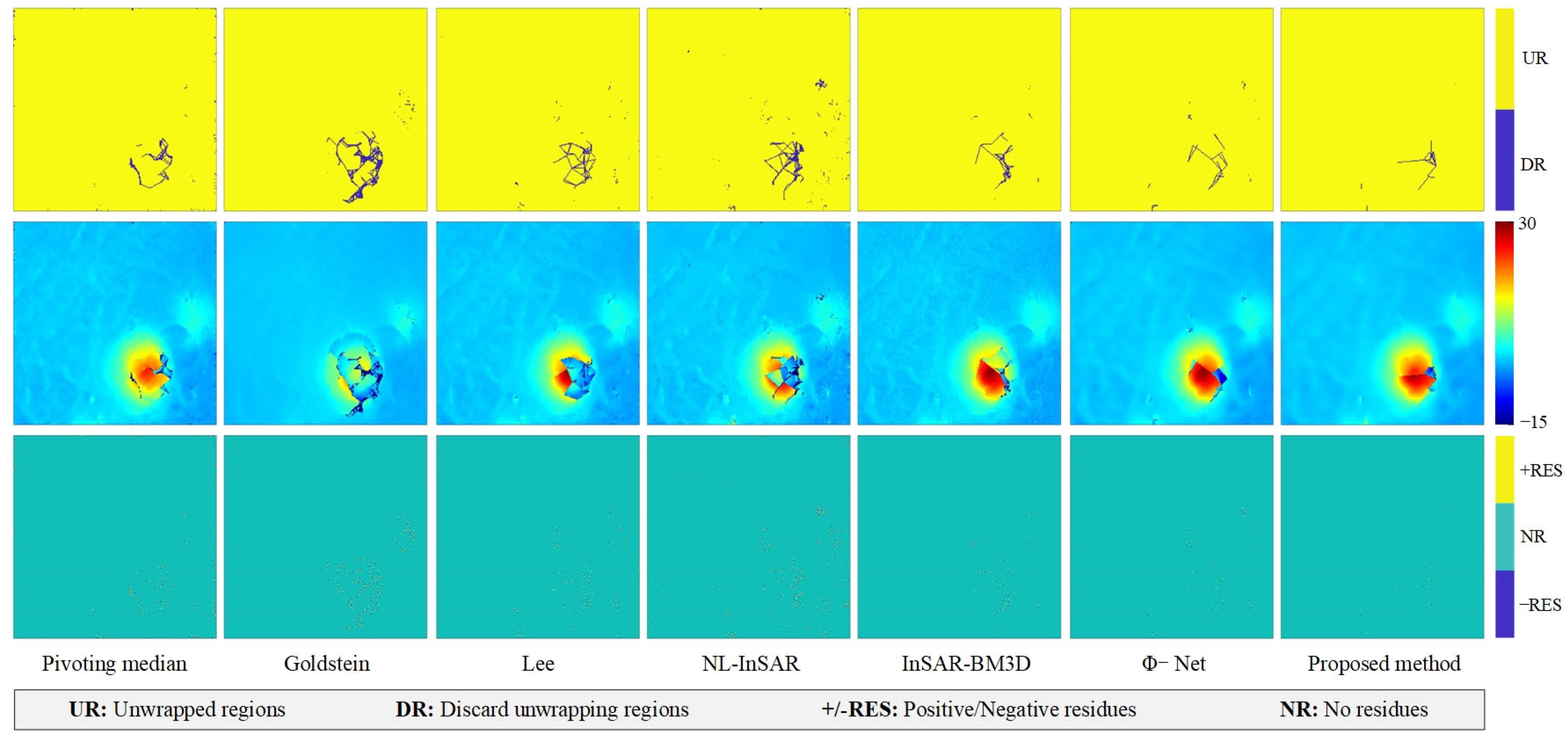
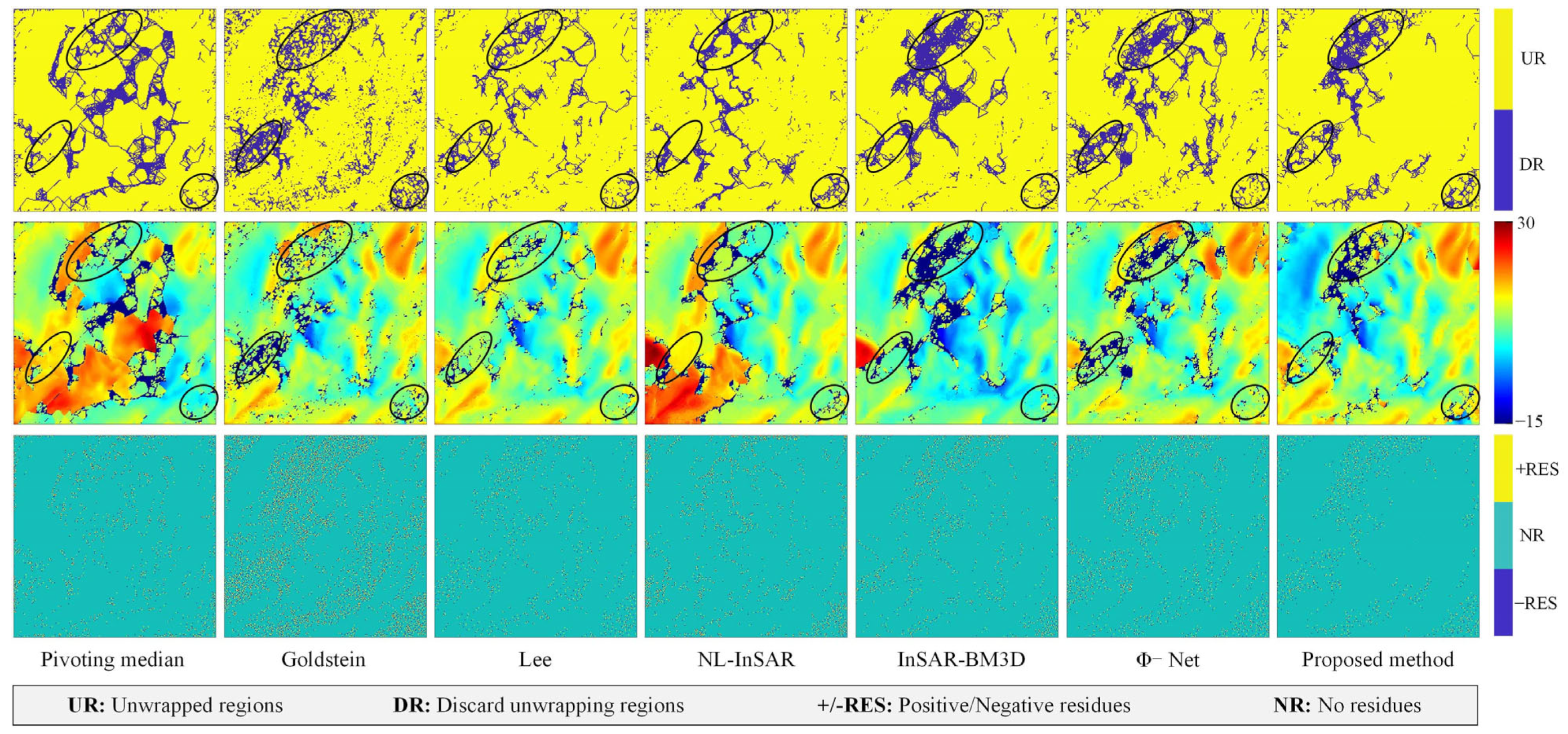
4.2. Evaluation of Filtering Method Performance by Phase Unwrapping
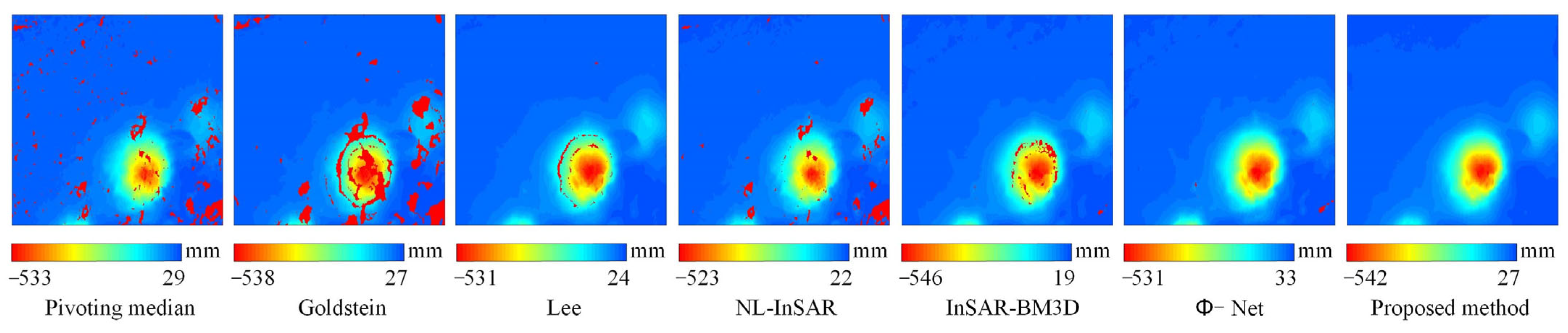
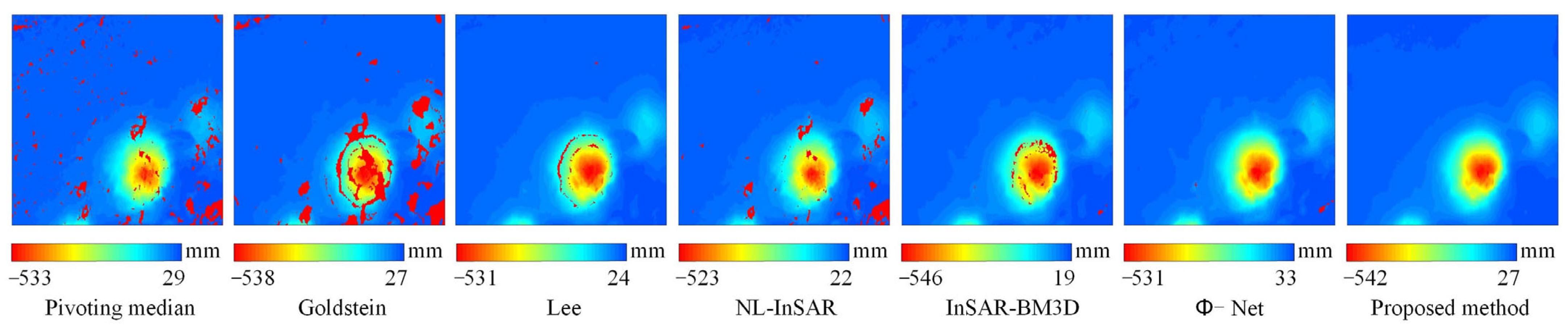
4.3. Evaluation of Filtering Methods Using TS-InSAR
4.4. Existing Problems and Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cigna, F.; Tapete, D. Satellite InSAR survey of structurally-controlled land subsidence due to groundwater exploitation in the Aguascalientes Valley, Mexico. Remote Sens. Environ. 2021, 254, 112254. [Google Scholar] [CrossRef]
- Liu, S.; Tang, H.; Feng, Y.; Chen, Y.; Lei, Z.; Wang, J.; Tong, X. A Comparative Study of DEM Reconstruction Using the Single-Baseline and Multibaseline InSAR Techniques. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8512–8521. [Google Scholar] [CrossRef]
- Yang, W.; He, Y.; Wang, W.H.; Chen, Y.D.; Chen, Y. InSAR monitoring of 3-D surface deformation in Jinchuan Mining area, Gansu Province. Remote Sens. Nat. Resour. 2022, 34, 177–188. [Google Scholar]
- He, Y.; Chen, Y.; Wang, W.; Yan, H.; Zhang, L.; Liu, T. TS-InSAR analysis for monitoring ground deformation in Lanzhou New District, the loess Plateau of China, from 2017 to 2019. Adv. Space Res. 2021, 67, 1267–1283. [Google Scholar] [CrossRef]
- Khaki, M.; Filmer, M.S.; Featherstone, W.E.; Kuhn, M.; Bui, L.K.; Parker, A.L. A sequential Monte Carlo framework for noise filtering in InSAR time series. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1904–1912. [Google Scholar] [CrossRef]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric radar echoes. IEEE Trans. Geosci. Remote Sens. 1992, 30, 950–959. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y. Study on High-Efficiency and High-Precision Filtering Methods for Synthetic Aperture Radar Interferometric Phase Images; National University of Defense Technology: Changsha, China, 2016. [Google Scholar]
- Lanari, R.; Fornaro, G.; Riccio, D.; Migliaccio, M.; Papathanassiou, K.P.; Moreira, J.R.; Coltelli, M. Generation of digital elevation models by using SIR-C/X-SAR multifrequency two-pass interferometry: The Etna case study. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1097–1114. [Google Scholar] [CrossRef]
- Lee, J.S.; Papathanassiou, K.P.; Ainsworth, T.L.; Grunes, M.R.; Reigber, A. A new technique for noise filtering of SAR interferometric phase images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1456–1465. [Google Scholar]
- Deledalle, C.A.; Denis, L.; Tupin, F. NL-InSAR: Nonlocal interferogram estimation. IEEE Trans. Geosci. Remote Sens. 2010, 49, 1441–1452. [Google Scholar] [CrossRef]
- Sica, F.; Cozzolino, D.; Zhu, X.X.; Verdoliva, L.; Poggi, G. InSAR-BM3D: A nonlocal filter for SAR interferometric phase restoration. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3456–3467. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Zhou, J.; Liu, S. Adaptive non-local means filter for image deblocking. Signal Processing Image Commun. 2013, 28, 522–530. [Google Scholar] [CrossRef]
- Wang, Q.; Huang, H.; Yu, A.; Dong, Z. An efficient and adaptive approach for noise filtering of SAR interferometric phase images. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1140–1144. [Google Scholar] [CrossRef]
- Xu, G.; Gao, Y.; Li, J.; Xing, M. InSAR phase denoising: A review of current technologies and future directions. IEEE Geosci. Remote Sens. Mag. 2020, 8, 64–82. [Google Scholar] [CrossRef] [Green Version]
- Baier, G.; Zhu, X.X.; Lachaise, M.; Breit, H.; Bamler, R. Nonlocal InSAR filtering for DEM generation and addressing the staircasing effect. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; pp. 1–4. [Google Scholar]
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef] [Green Version]
- Trouve, E.; Nicolas, J.M.; Maitre, H. Improving phase unwrapping techniques by the use of local frequency estimates. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1963–1972. [Google Scholar] [CrossRef] [Green Version]
- Rao, Y.; Zhao, W.; Zhu, Z.; Lu, J.; Zhou, J. Global filter networks for image classification. Adv. Neural Inf. Processing Syst. 2021, 34, 980–993. [Google Scholar]
- Jiang, M.; Ding, X.; Tian, X.; Malhotra, R.; Kong, W. A hybrid method for optimization of the adaptive Goldstein filter. ISPRS J. Photogramm. Remote Sens. 2014, 98, 29–43. [Google Scholar] [CrossRef]
- Bian, Y.; Mercer, B. Interferometric SAR phase filtering in the wavelet domain using simultaneous detection and estimation. IEEE Trans. Geosci. Remote Sens. 2010, 49, 1396–1416. [Google Scholar] [CrossRef]
- Li, S.; Xu, H.; Gao, S.; Liu, W.; Li, C.; Liu, A. An interferometric phase noise reduction method based on modified denoising convolutional neural network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4947–4959. [Google Scholar] [CrossRef]
- Zhang, K.; Zuo, W.; Chen, Y.; Meng, D.; Zhang, L. Beyond a gaussian denoiser: Residual learning of deep cnn for image denoising. IEEE Trans. Image Processing 2017, 26, 3142–3155. [Google Scholar] [CrossRef] [Green Version]
- Sica, F.; Gobbi, G.; Rizzoli, P.; Bruzzone, L. Φ-Net: Deep residual learning for InSAR parameters estimation. IEEE Trans. Geosci. Remote Sens. 2020, 59, 3917–3941. [Google Scholar] [CrossRef]
- He, Y.; Yao, S.; Yang, W.; Yan, H.; Zhang, L.; Wen, Z.; Liu, T. An extraction method for glacial lakes based on Landsat-8 im-agery using an improved U-Net network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6544–6558. [Google Scholar] [CrossRef]
- Sara, U.; Akter, M.; Uddin, M.S. Image quality assessment through FSIM, SSIM, MSE and PSNR—A comparative study. J. Comput. Commun. 2019, 7, 8–18. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Zhao, Z.A.; Yang, W.; Yan, H.; Wang, W.; Yao, S.; Zhang, L.; Liu, T. A unified network of information considering superimposed landslide factors sequence and pixel spatial neighbourhood for landslide susceptibility mapping. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102508. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 448–456. [Google Scholar]
- Baldi, P.; Sadowski, P. The dropout learning algorithm. Artif. Intell. 2014, 210, 78–122. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Awais, M.; Iqbal, M.T.B.; Bae, S.H. Revisiting internal covariate shift for batch normalization. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 5082–5092. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Pu, L.; Zhang, X.; Zhou, Z.; Shi, J.; Wei, S.; Zhou, Y. A Phase Filtering Method with Scale Recurrent Networks for InSAR. Remote Sens. 2020, 12, 3453. [Google Scholar] [CrossRef]
- Fang, D. The study of terrain simulation based on fractal. WSEAS Trans. Comput. 2009, 8, 133–142. [Google Scholar]
- Rongier, G.; Rude, C.; Herring, T.; Pankratius, V. Generative modeling of InSAR interferograms. Earth Space Sci. 2019, 6, 2671–2683. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Fattahi, H.; Amelung, F. Small baseline InSAR time series analysis: Unwrapping error correction and noise reduction. Comput. Geosci. 2019, 133, 104331. [Google Scholar]
- Martinez-Espla, J.J.; Martinez-Marin, T.; Lopez-Sanchez, J.M. A particle filter approach for InSAR phase filtering and unwrapping. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1197–1211. [Google Scholar] [CrossRef]
- Li, Q. Surface Subsidence Monitoring of Jinchuan Mining Area in Gansu Based on Space-Air-Ground Integration. Master’s Thesis, Southwest University of Science and Technology, Mianyang, China, 2020. [Google Scholar]
- Xu, B.; Feng, G.; Li, Z.; Wang, Q.; Wang, C.; Xie, R. Coastal subsidence monitoring associated with land reclamation using the point target based SBAS-InSAR method: A case study of Shenzhen, China. Remote Sens. 2016, 8, 652. [Google Scholar] [CrossRef] [Green Version]
- Dai, K.; Li, Z.; Xu, Q.; Bürgmann, R.; Milledge, D.G.; Tomas, R.; Fan, X.; Zhao, C.; Liu, X.; Peng, J.; et al. Entering the era of earth observation-based landslide warning systems: A novel and exciting framework. IEEE Geosci. Remote Sens. Mag. 2020, 8, 136–153. [Google Scholar] [CrossRef] [Green Version]
- Sun, Q.; Ma, F.; Guo, J.; Li, G.; Feng, X. Deformation failure mechanism of deep vertical shaft in Jinchuan mining area. Sustainability 2020, 12, 2226. [Google Scholar] [CrossRef] [Green Version]
- Gorbatsevich, V.; Melnichenko, M.; Vygolov, O. Enhancing detail of 3D terrain models using GAN. In Proceedings of the Modeling Aspects in Optical Metrology VII, Munich, Germany, 21 June 2019; Volume 11057, pp. 296–302. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | RMSE | SSIM | T(s) |
|---|---|---|---|
| Pivoting median | 1.38 | 0.83 | 3.5 |
| Goldstein | 1.73 | 0.76 | 10.4 |
| Lee | 1.35 | 0.85 | 11.6 |
| NL-InSAR | 0.95 | 0.91 | 168.1 |
| InSAR-BM3D | 0.88 | 0.93 | 22.1 |
| Φ-Net | 0.84 | 0.93 | 0.21 |
| Proposed Method | 0.74 | 0.96 | 0.14 |
| Case | Platform | Time of Master Image | Time of Master Image | Polarization | Orbital Direction | Band |
|---|---|---|---|---|---|---|
| Jinchuan mine area | Sentinel-1A | 1 December 2014 | 18 May 2015 | VV | Ascending | C |
| L’Aquila | COSMO-SkyMed | 12 April 2009 | 14 May 2009 | HH | Ascending | X |
| Sequence | Time | Sequence | Time |
|---|---|---|---|
| 1 | 14 October 2014 | 9 | 20 December 2015 |
| 2 | 1 December 2014 | 10 | 6 February 2016 |
| 3 | 11 February 2015 | 11 | 25 March 2016 |
| 4 | 31 March 2015 | 12 | 5 June 2016 |
| 5 | 11 June 2015 | 13 | 16 August 2016 |
| 6 | 29 July 2015 | 14 | 3 October 2016 |
| 7 | 9 October 2015 | 15 | 20 November 2016 |
| 8 | 26 November 2015 | 16 | 7 January 2017 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; He, Y.; Yao, S.; Zhang, L.; Cao, S.; Wen, Z. An InSAR Interferogram Filtering Method Based on Multi-Level Feature Fusion CNN. Sensors 2022, 22, 5956. https://doi.org/10.3390/s22165956
Yang W, He Y, Yao S, Zhang L, Cao S, Wen Z. An InSAR Interferogram Filtering Method Based on Multi-Level Feature Fusion CNN. Sensors. 2022; 22(16):5956. https://doi.org/10.3390/s22165956
Chicago/Turabian StyleYang, Wang, Yi He, Sheng Yao, Lifeng Zhang, Shengpeng Cao, and Zhiqing Wen. 2022. "An InSAR Interferogram Filtering Method Based on Multi-Level Feature Fusion CNN" Sensors 22, no. 16: 5956. https://doi.org/10.3390/s22165956
APA StyleYang, W., He, Y., Yao, S., Zhang, L., Cao, S., & Wen, Z. (2022). An InSAR Interferogram Filtering Method Based on Multi-Level Feature Fusion CNN. Sensors, 22(16), 5956. https://doi.org/10.3390/s22165956