
Research on an Efficient Deep-Hole Application Method for Liquid Fertilizer Based on Alternate Drilling








Abstract
:1. Introduction
2. Materials and Methods
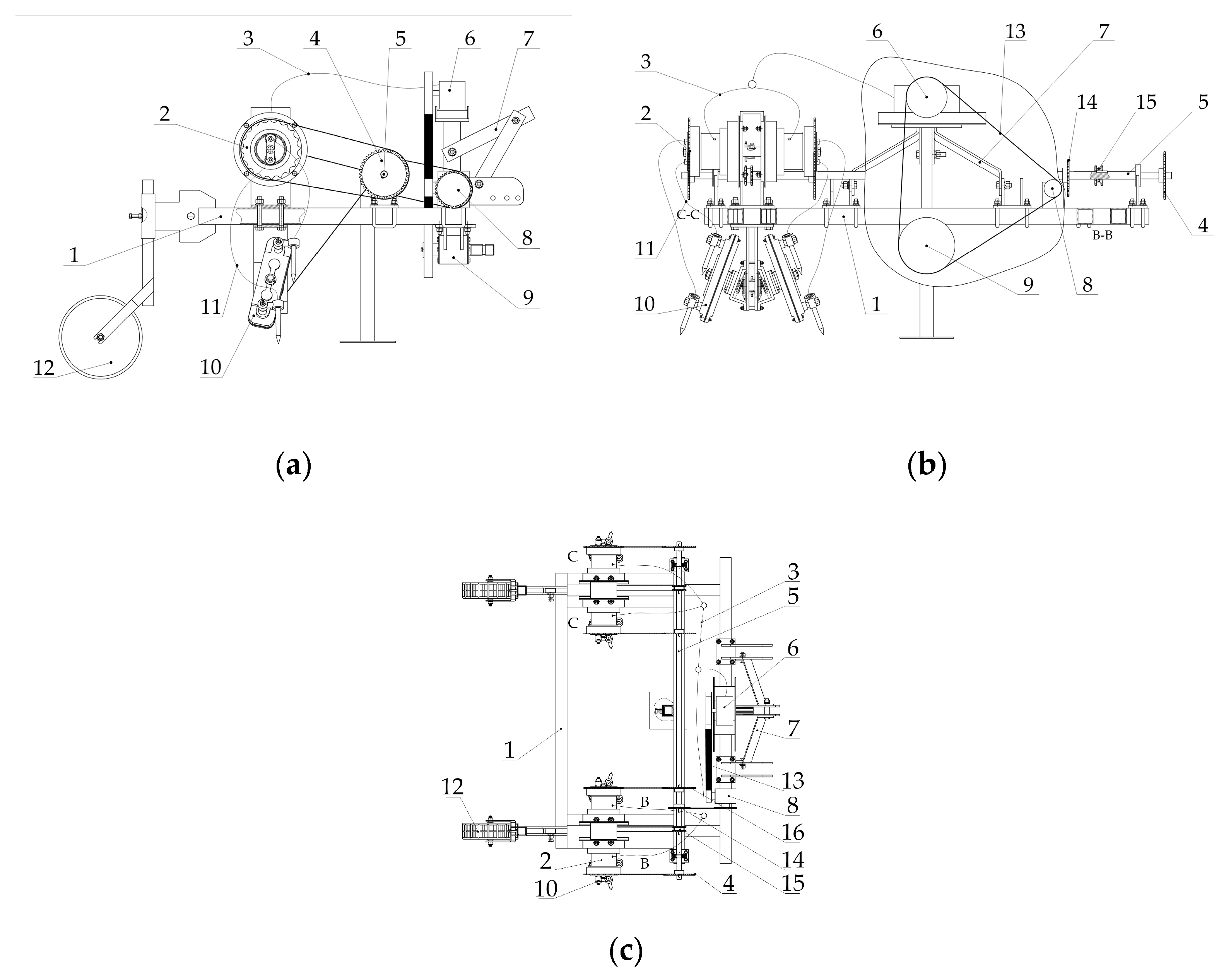
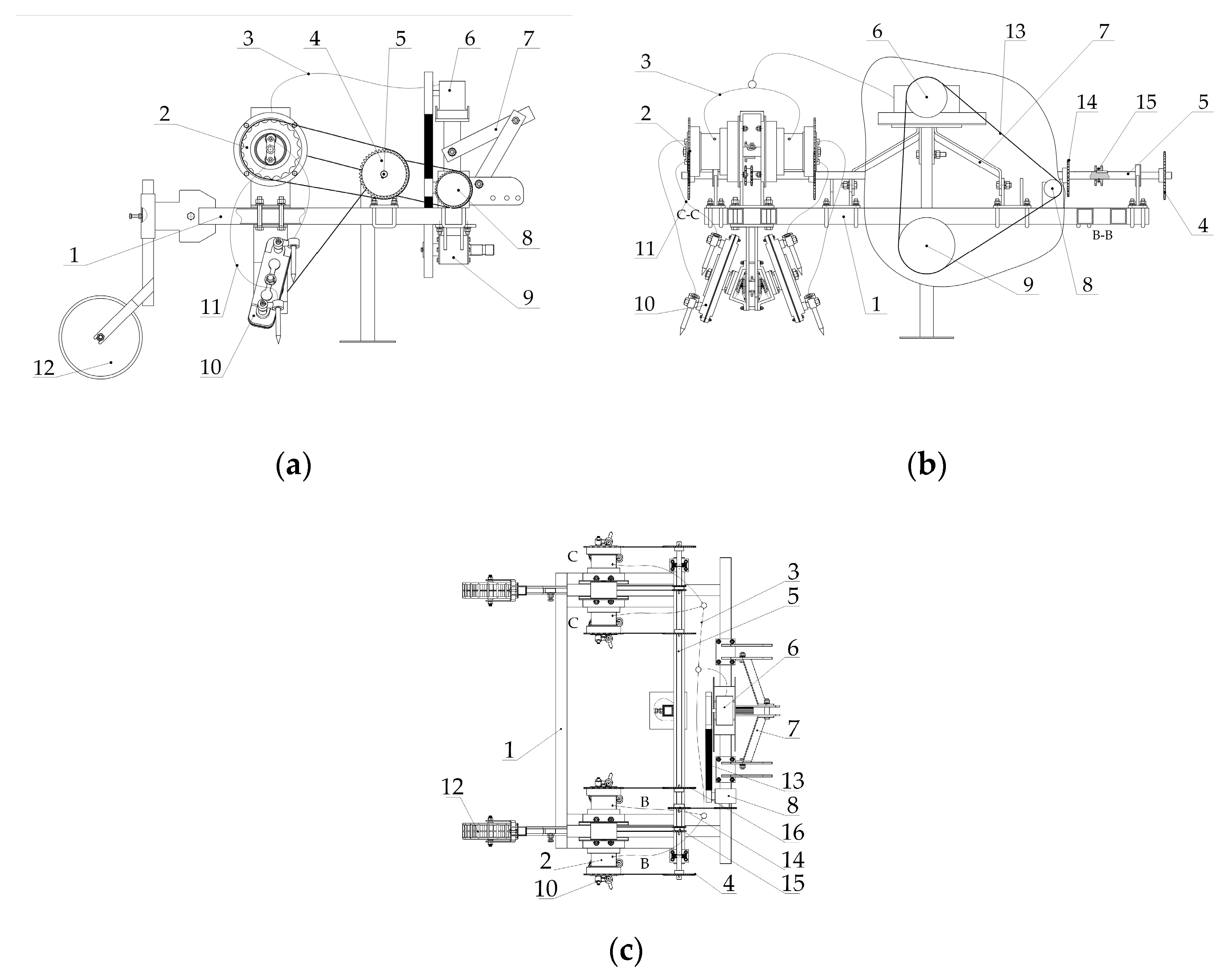
2.1. Machine Structure
2.2. Working Principle of the System
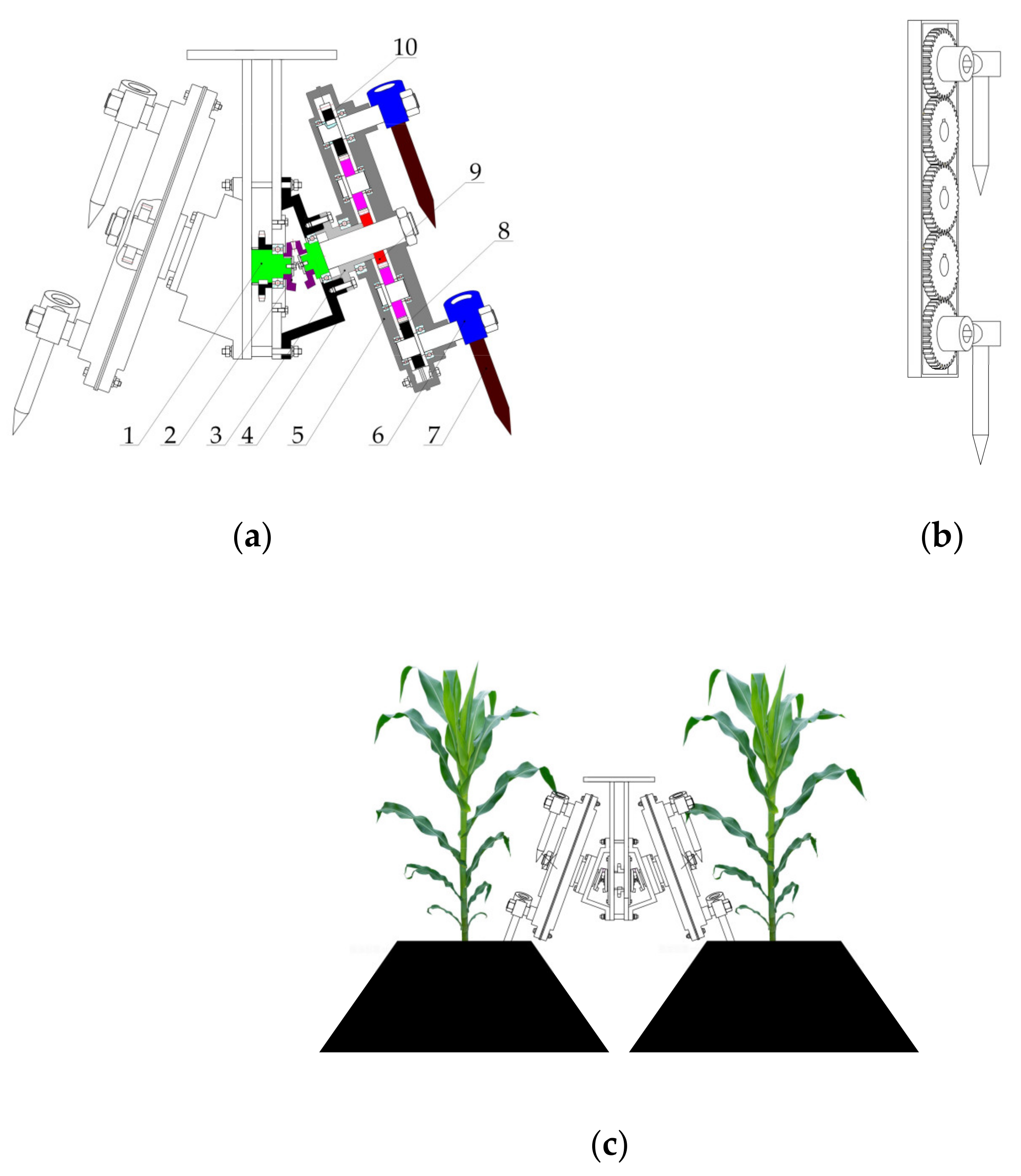
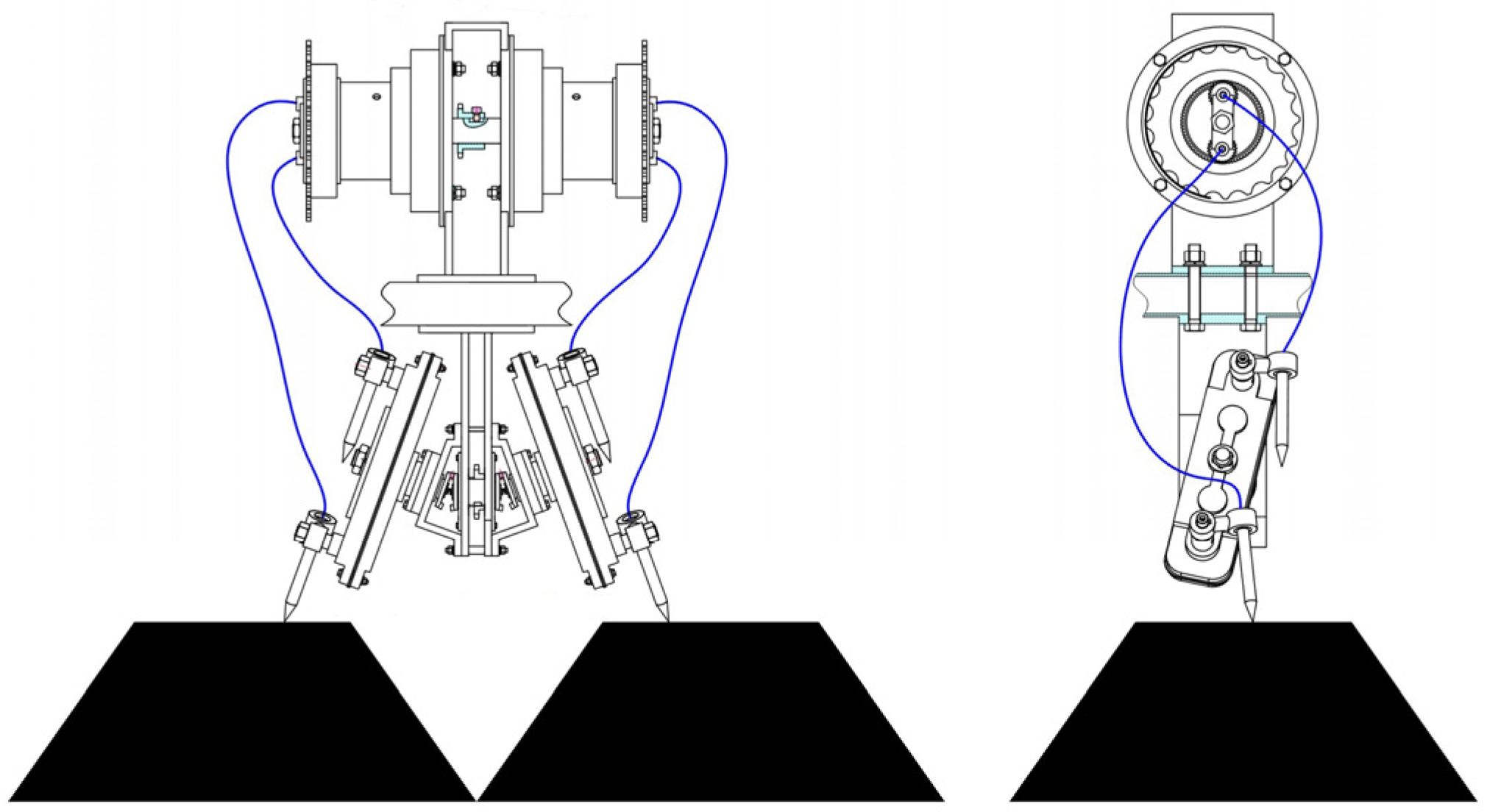
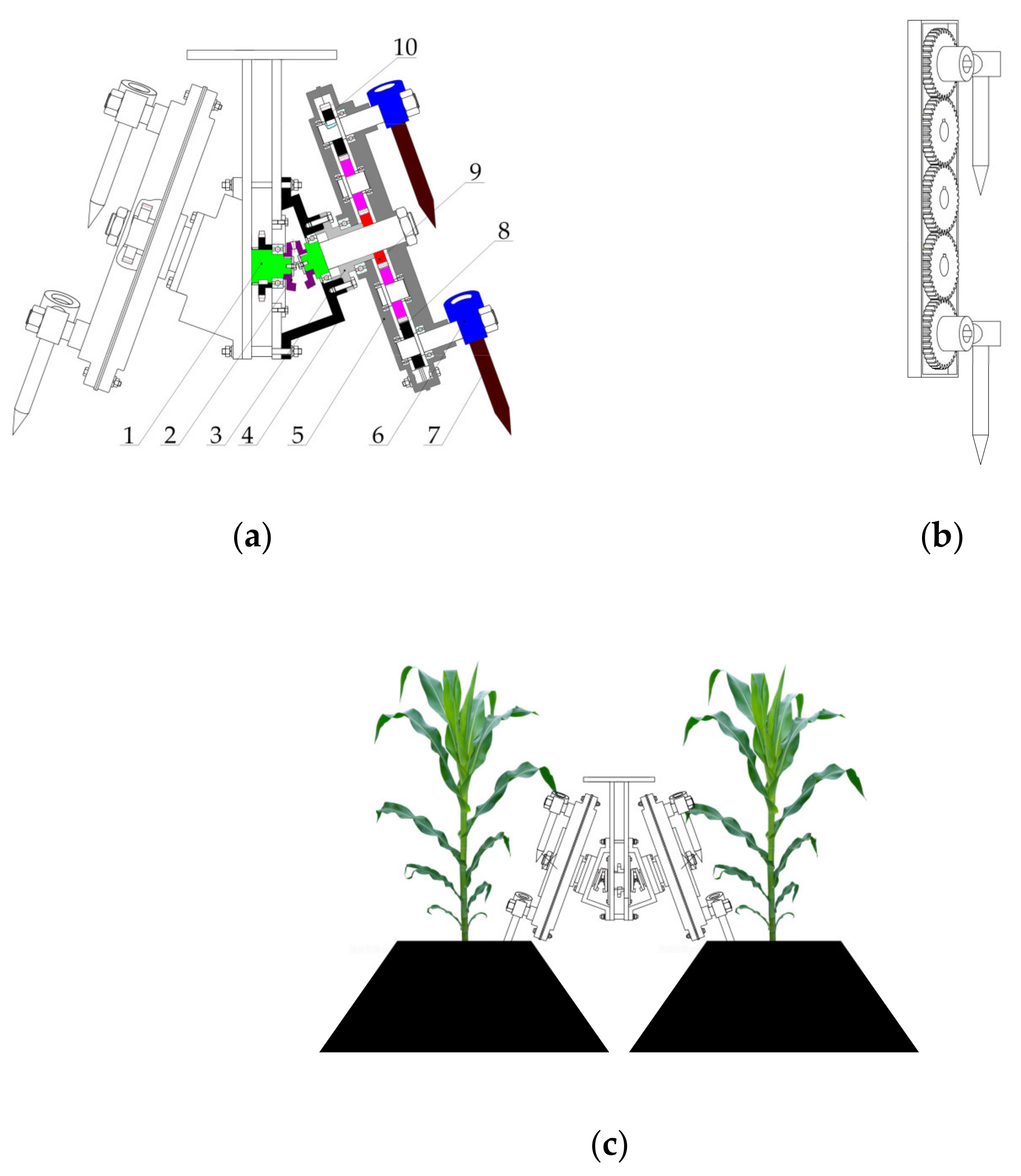
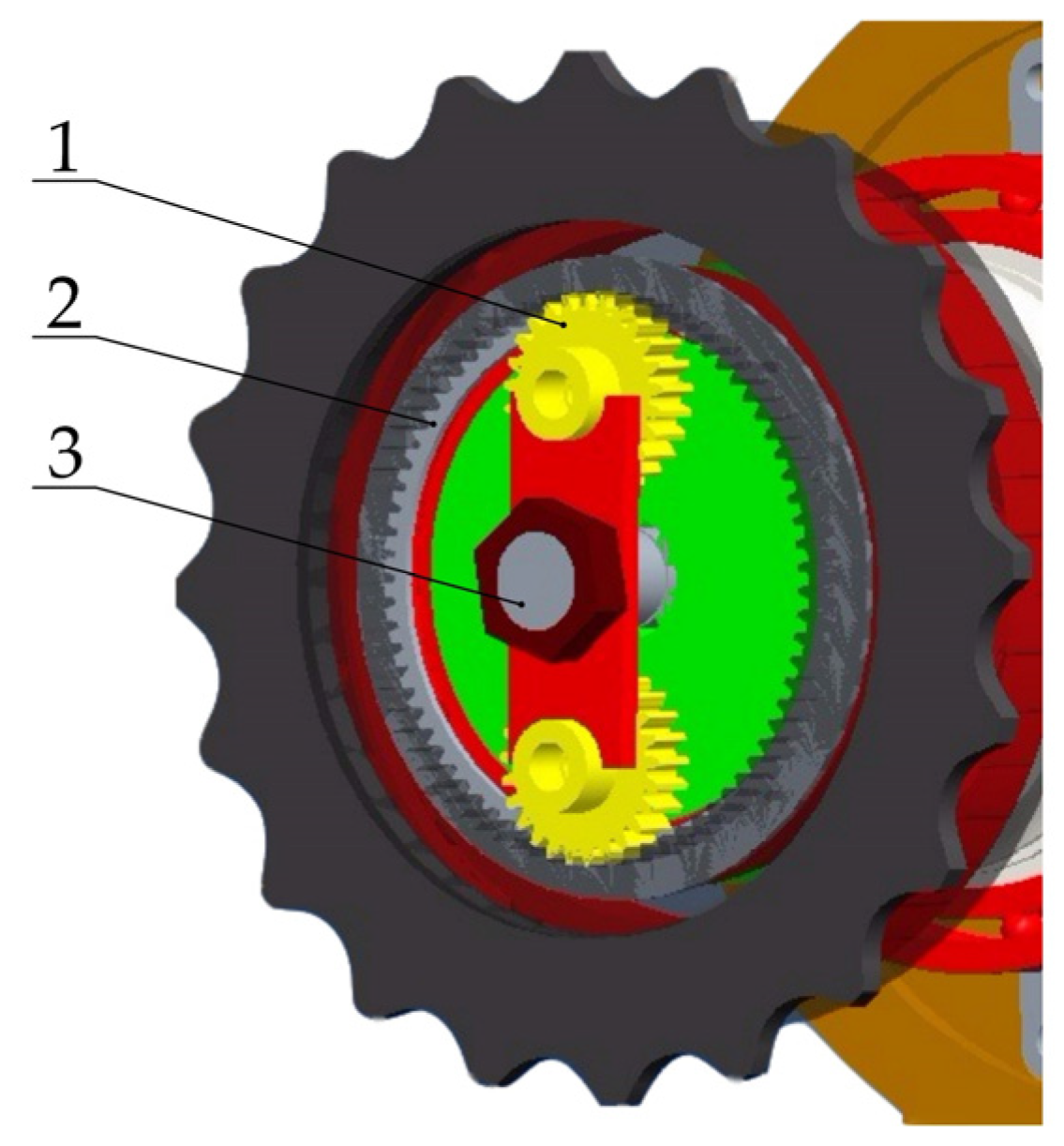
2.3. Structure and Working Principle of Drilling Mechanism
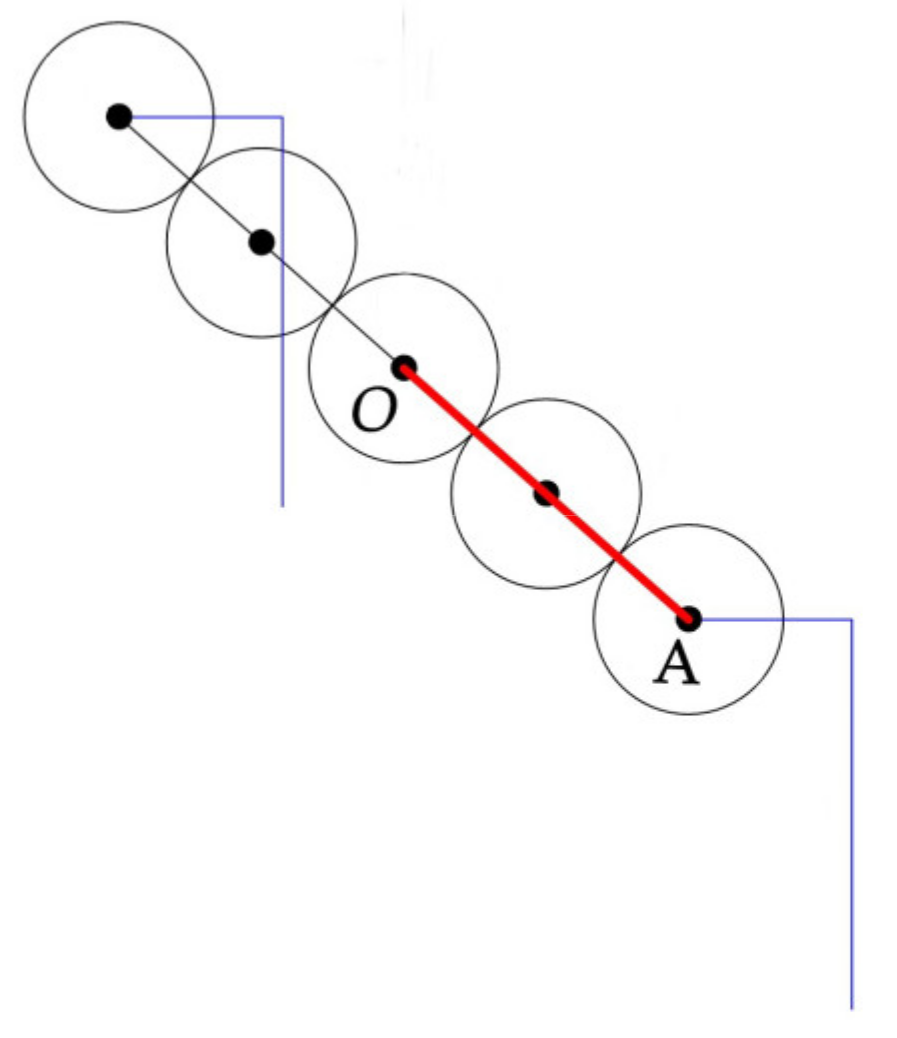
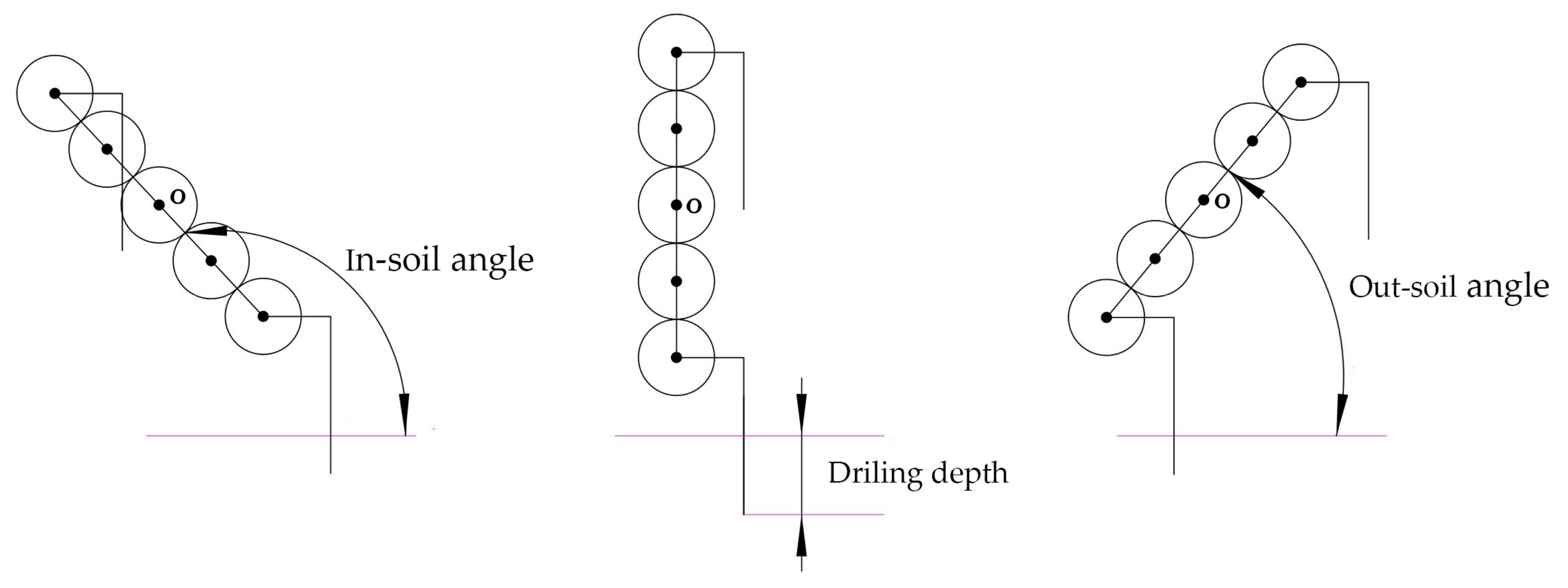
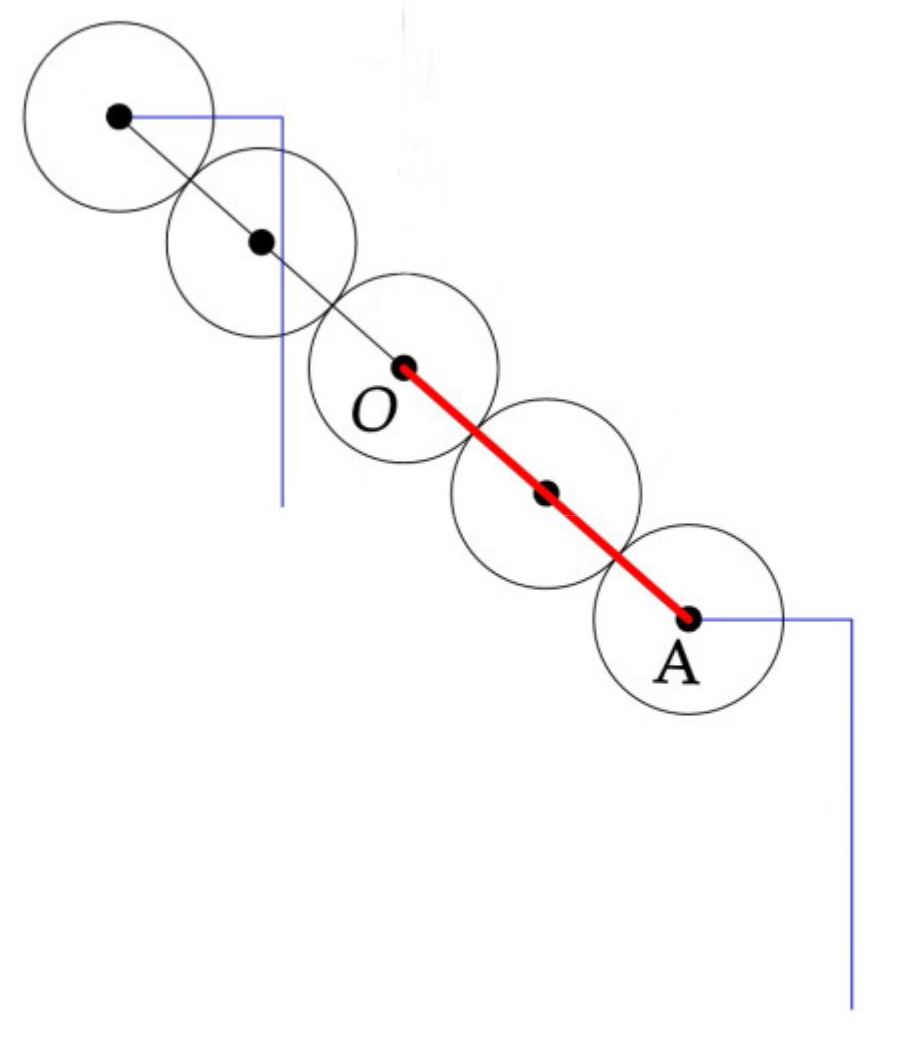
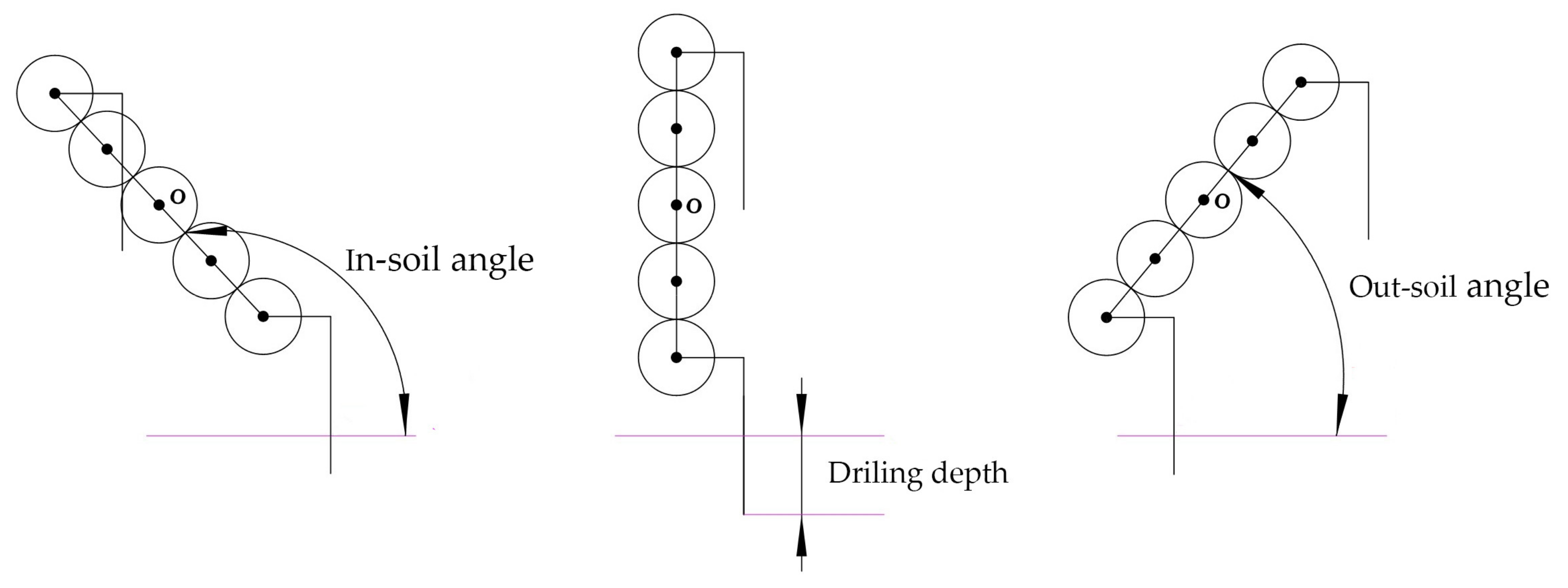
2.4. Parameters of Drilling Mechanism
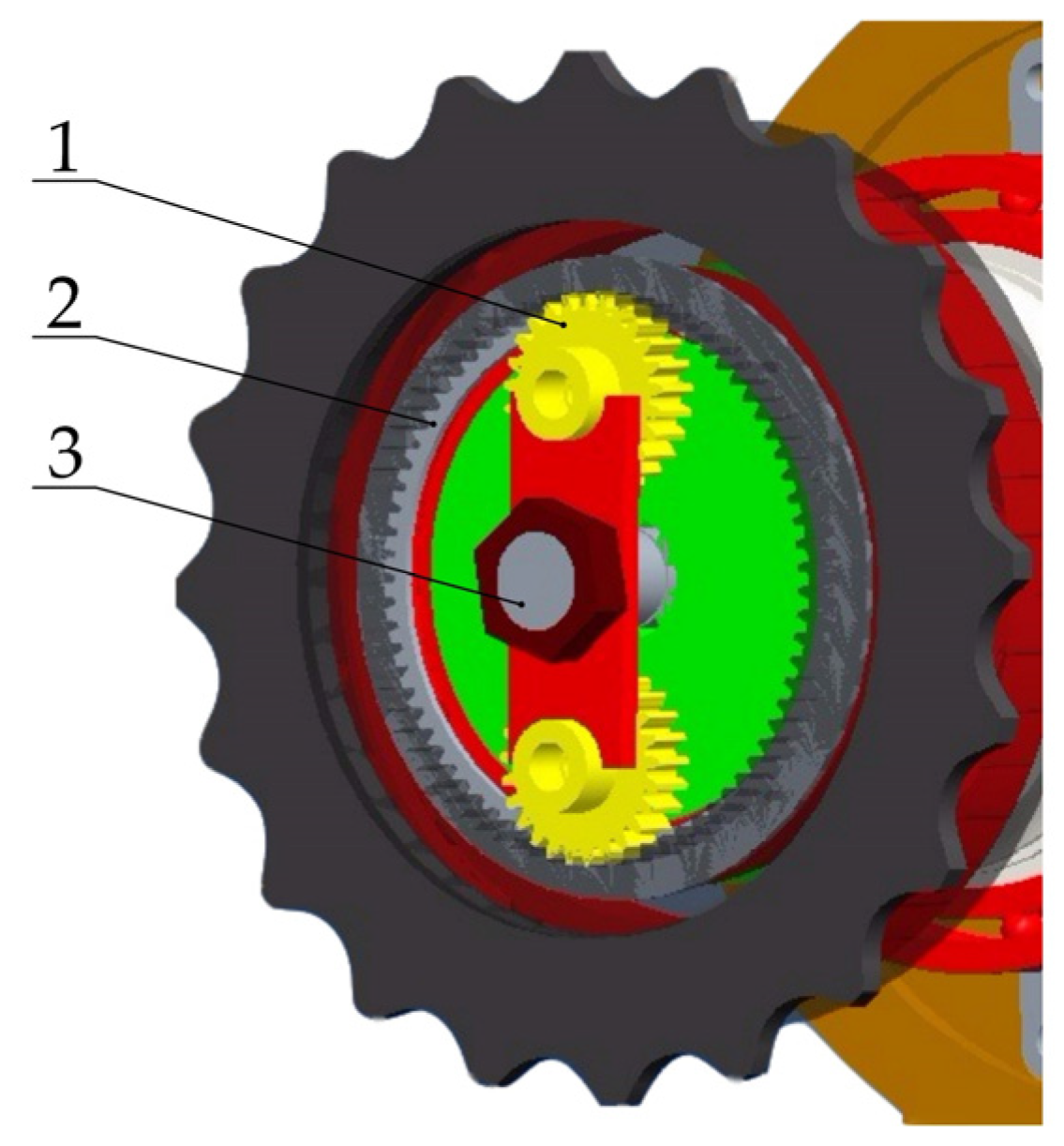
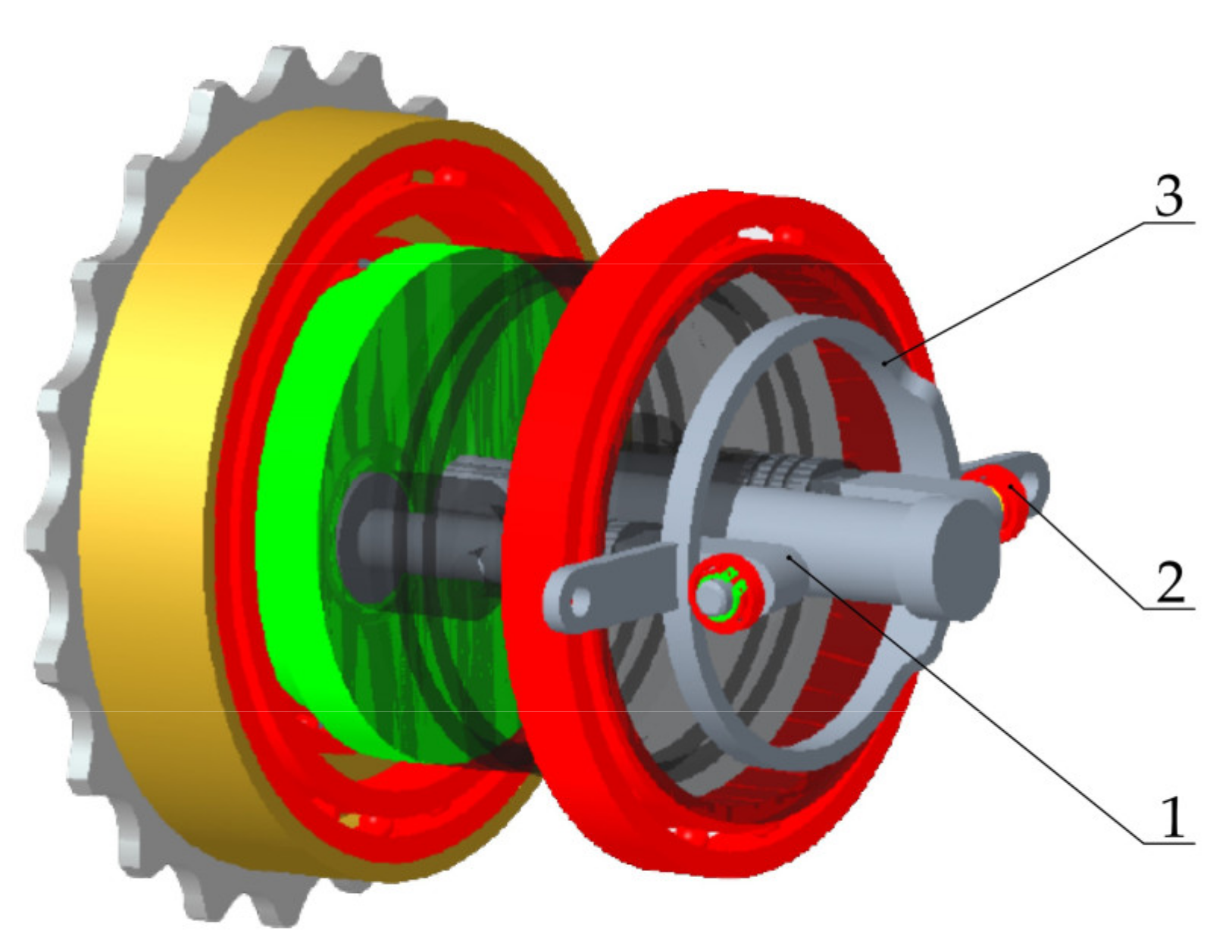
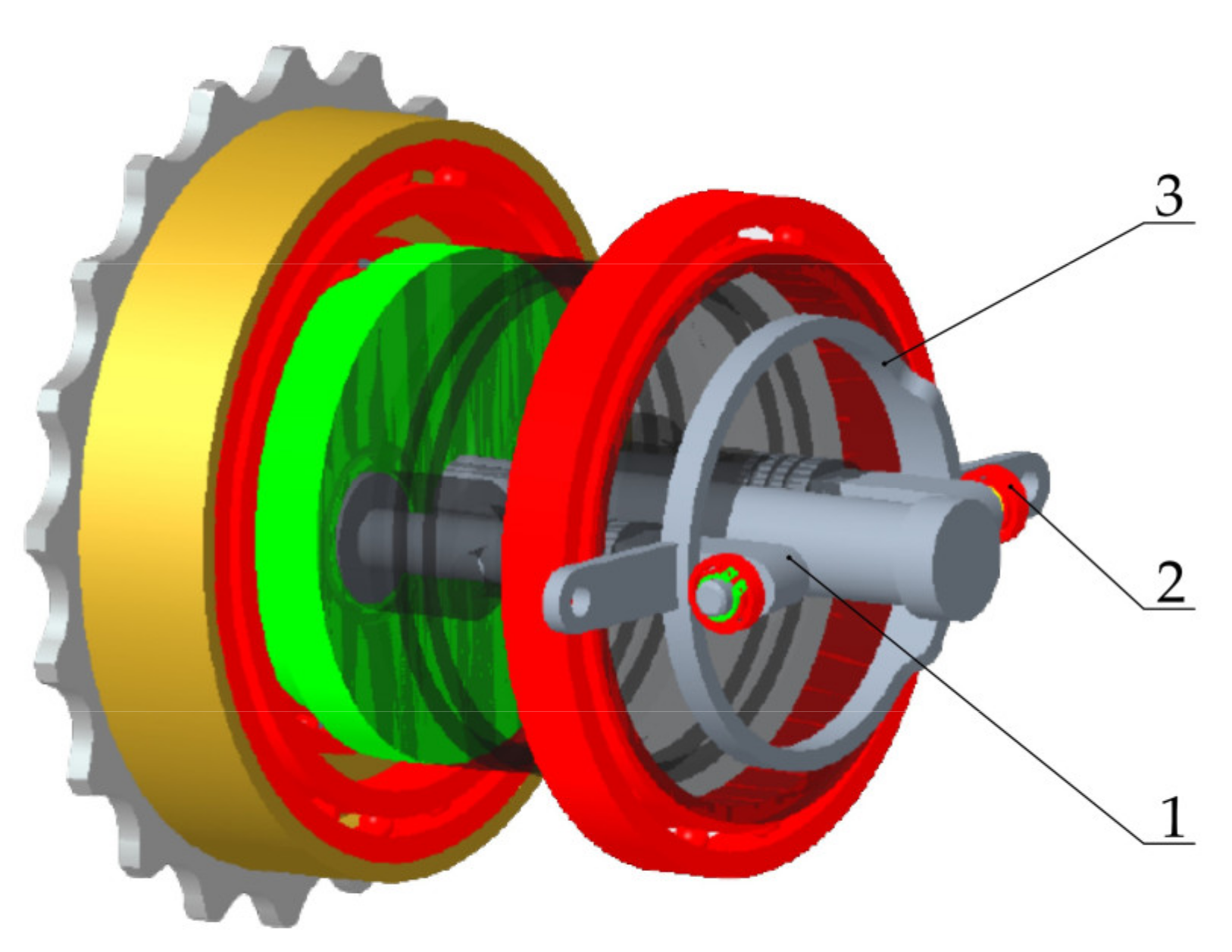
2.5. Structure and Working Principle of Drilling Mechanism
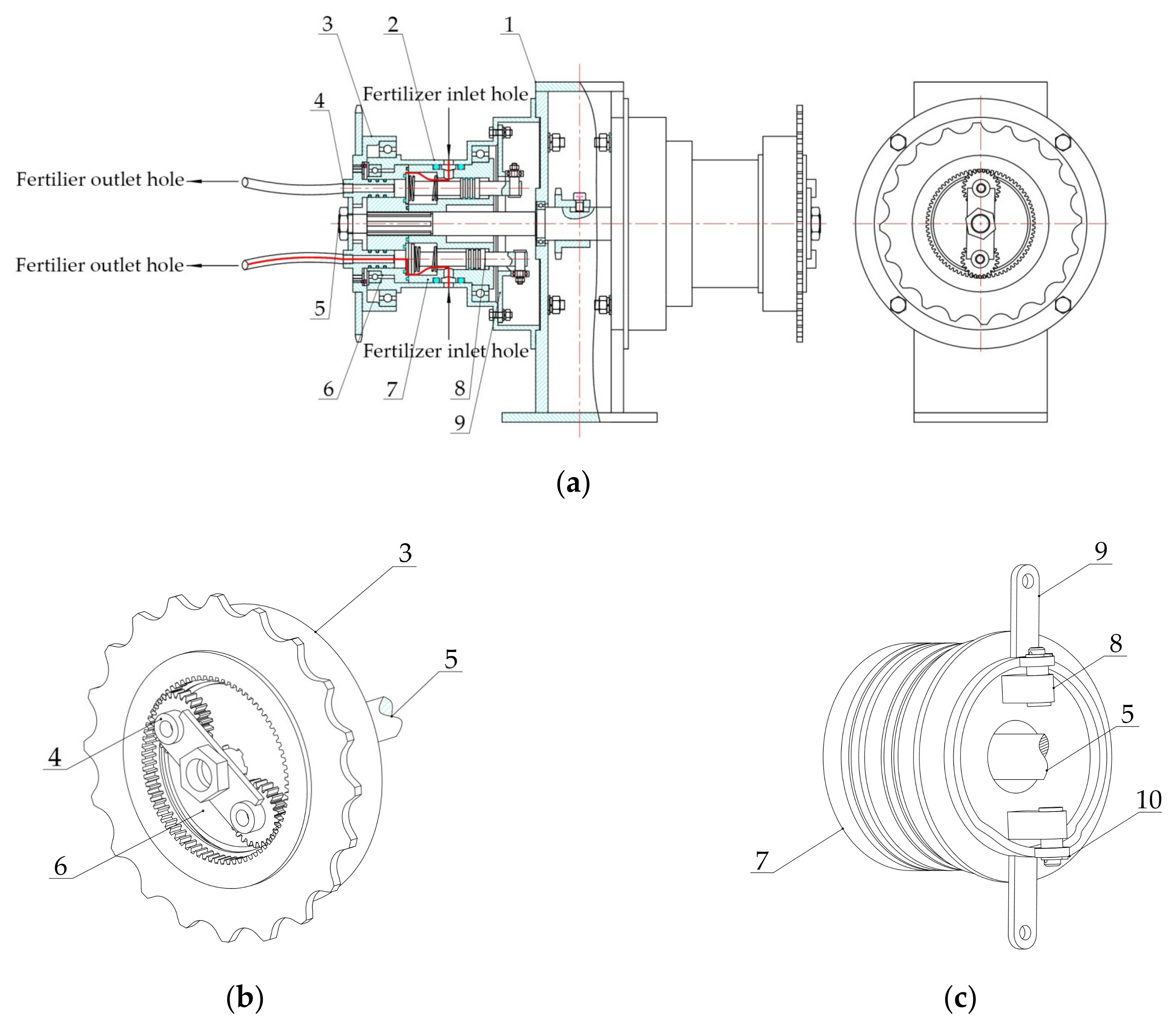
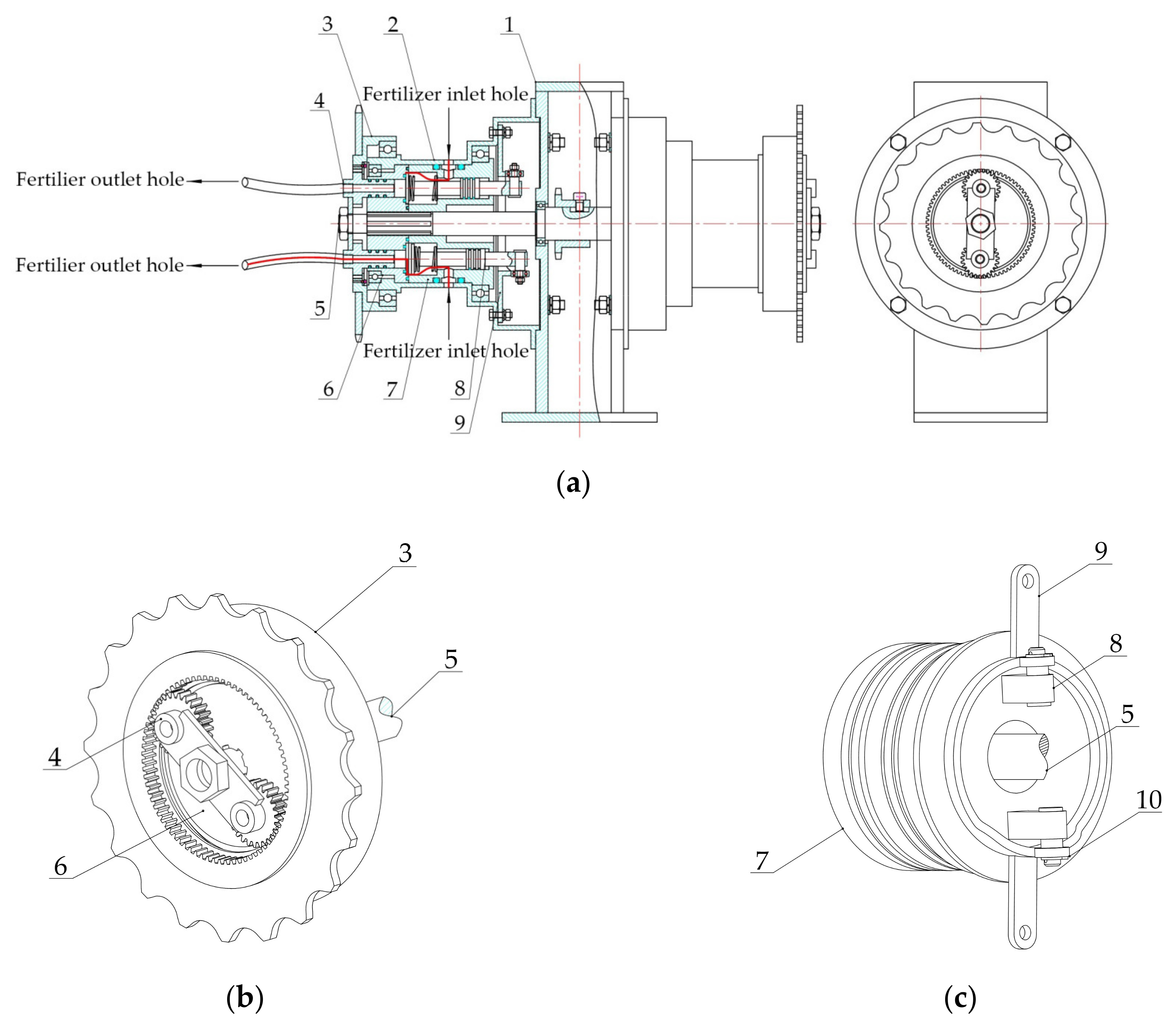
2.6. Fertilizer Injecting Control Mechanism Parameters
2.6.1. Differential Wheel Mechanism
2.6.2. Cylindrical Hollow Cam Mechanism
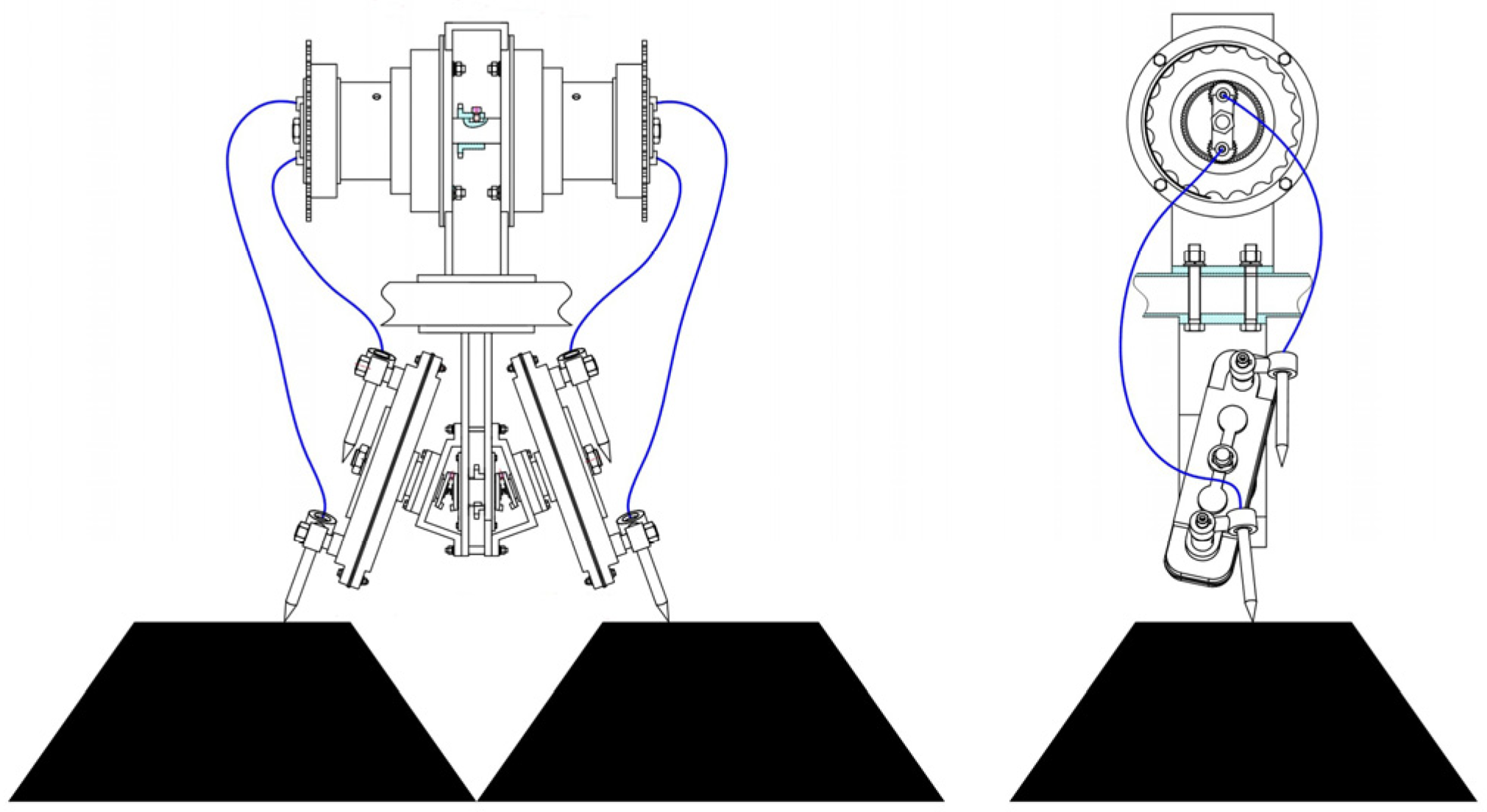
2.7. Traction Equipment
2.8. Bench Test
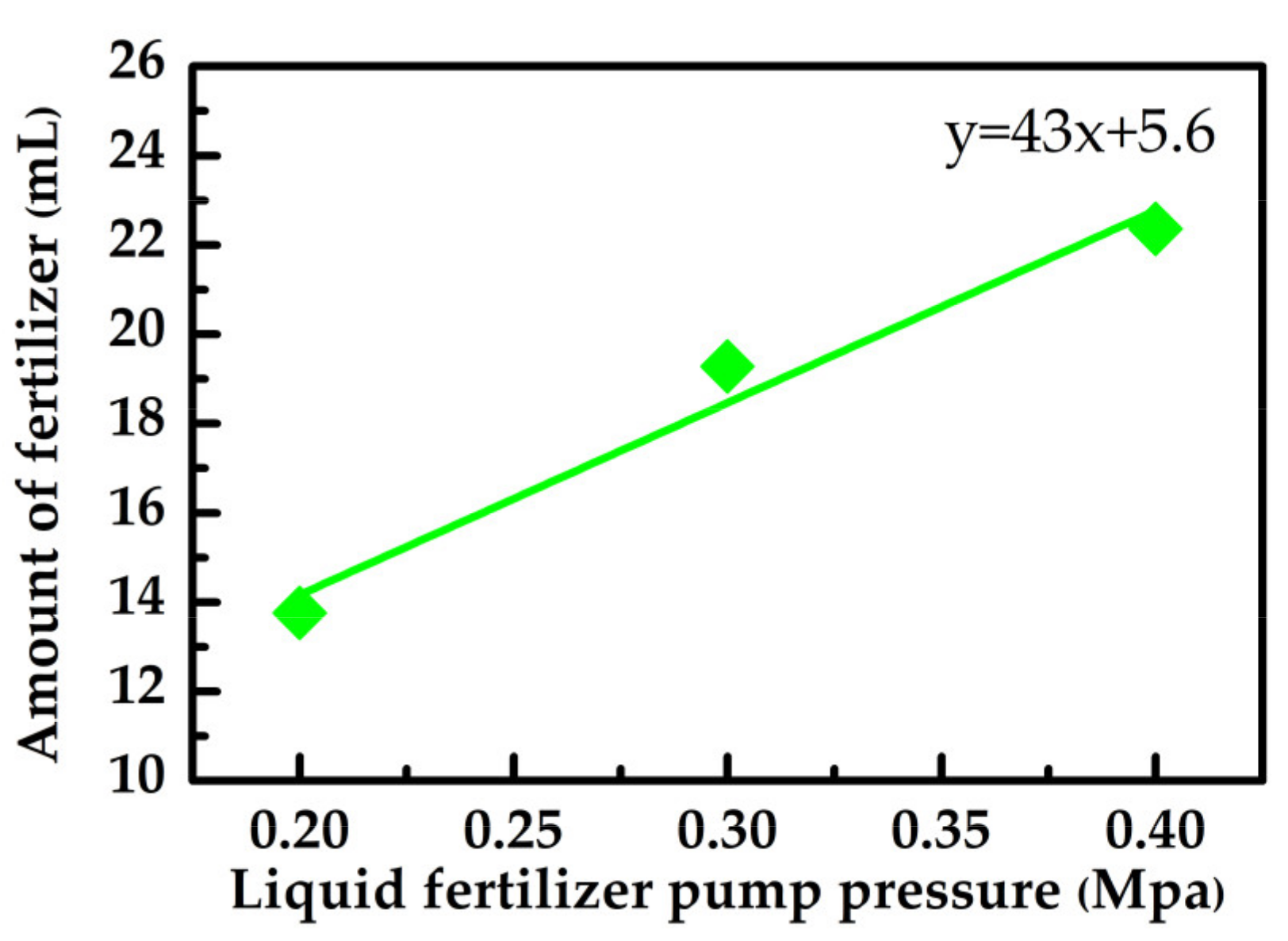
2.8.1. Fertilizer Application Volume and Liquid Fertilizer Pump Pressure Bench Test
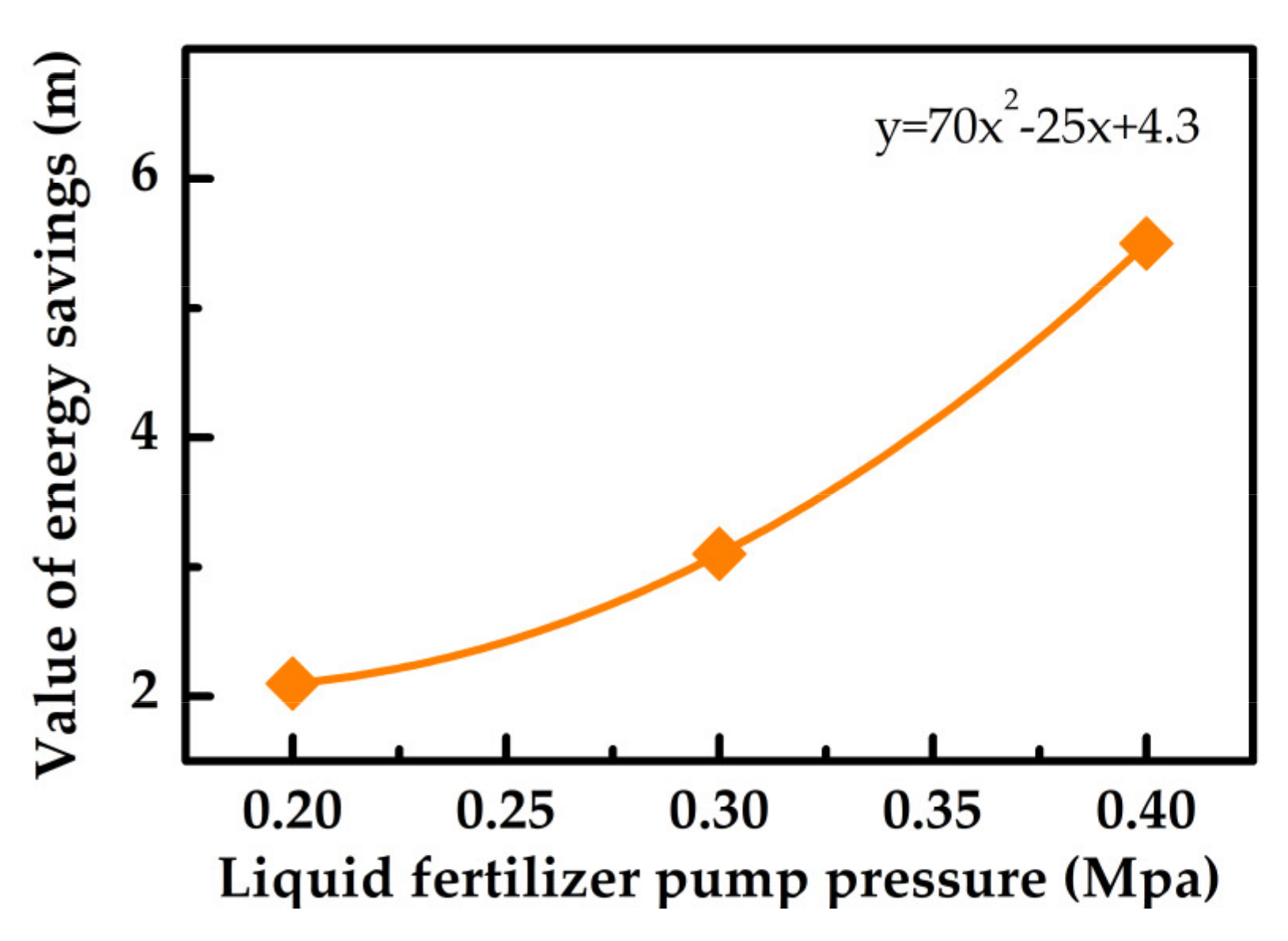
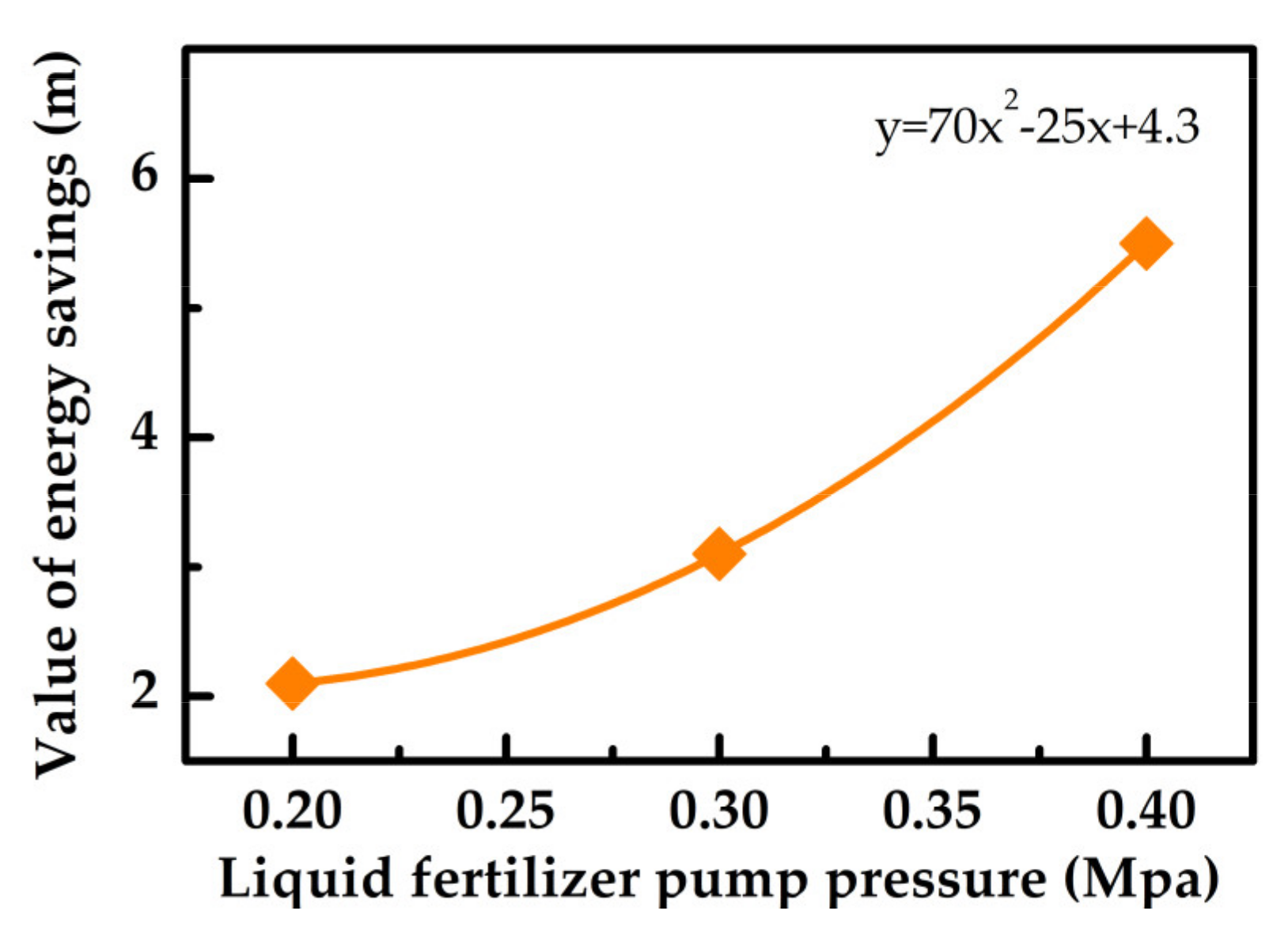
2.8.2. Fertilizer Energy Loss and Liquid Fertilizer Pump Pressure Bench Test
2.9. Field Test
2.10. Test Program
3. Results and Discussion
3.1. Fertilizer Application Volume and Liquid Fertilizer Pump Pressure Bench Test
3.2. Energy Saving Test
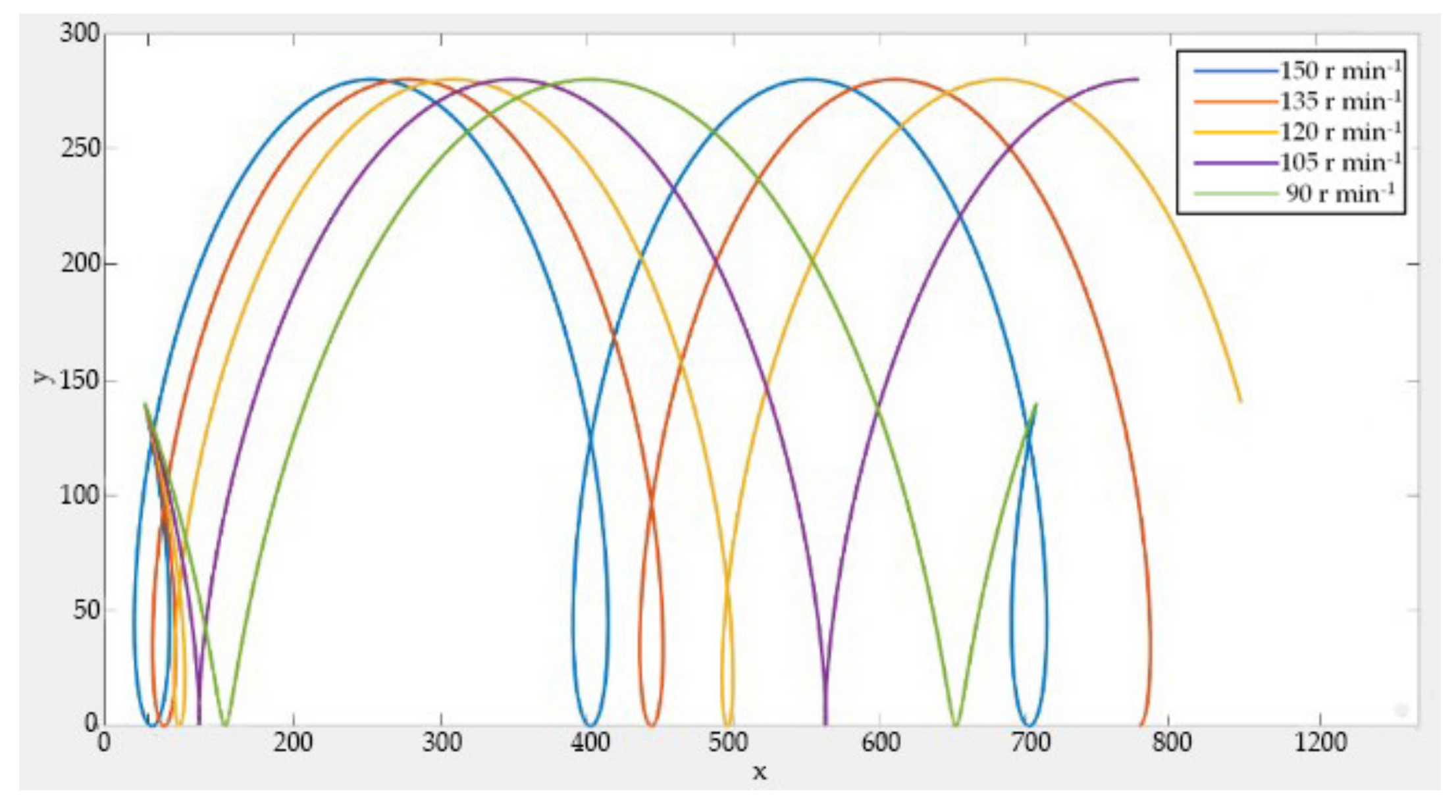
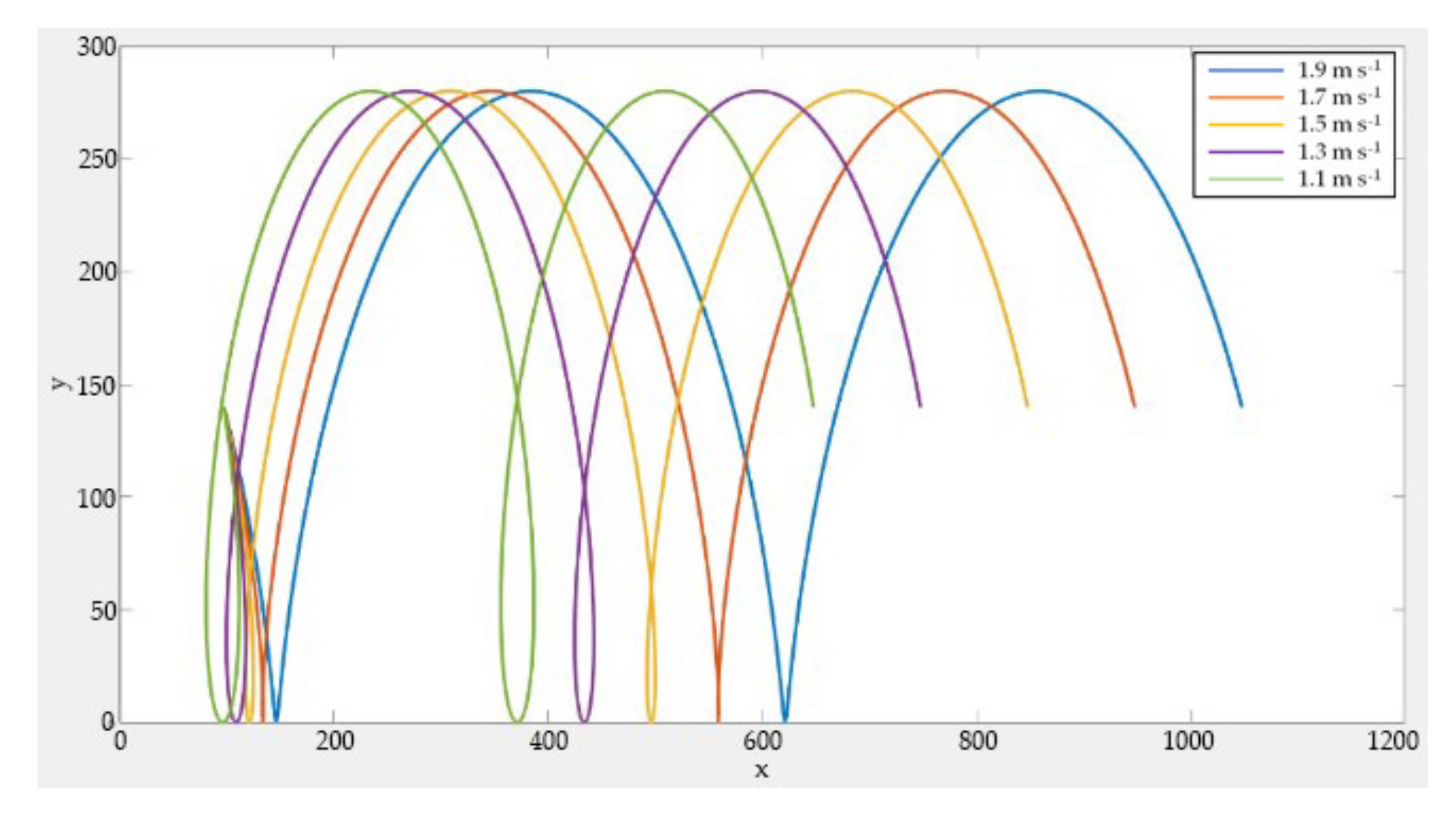
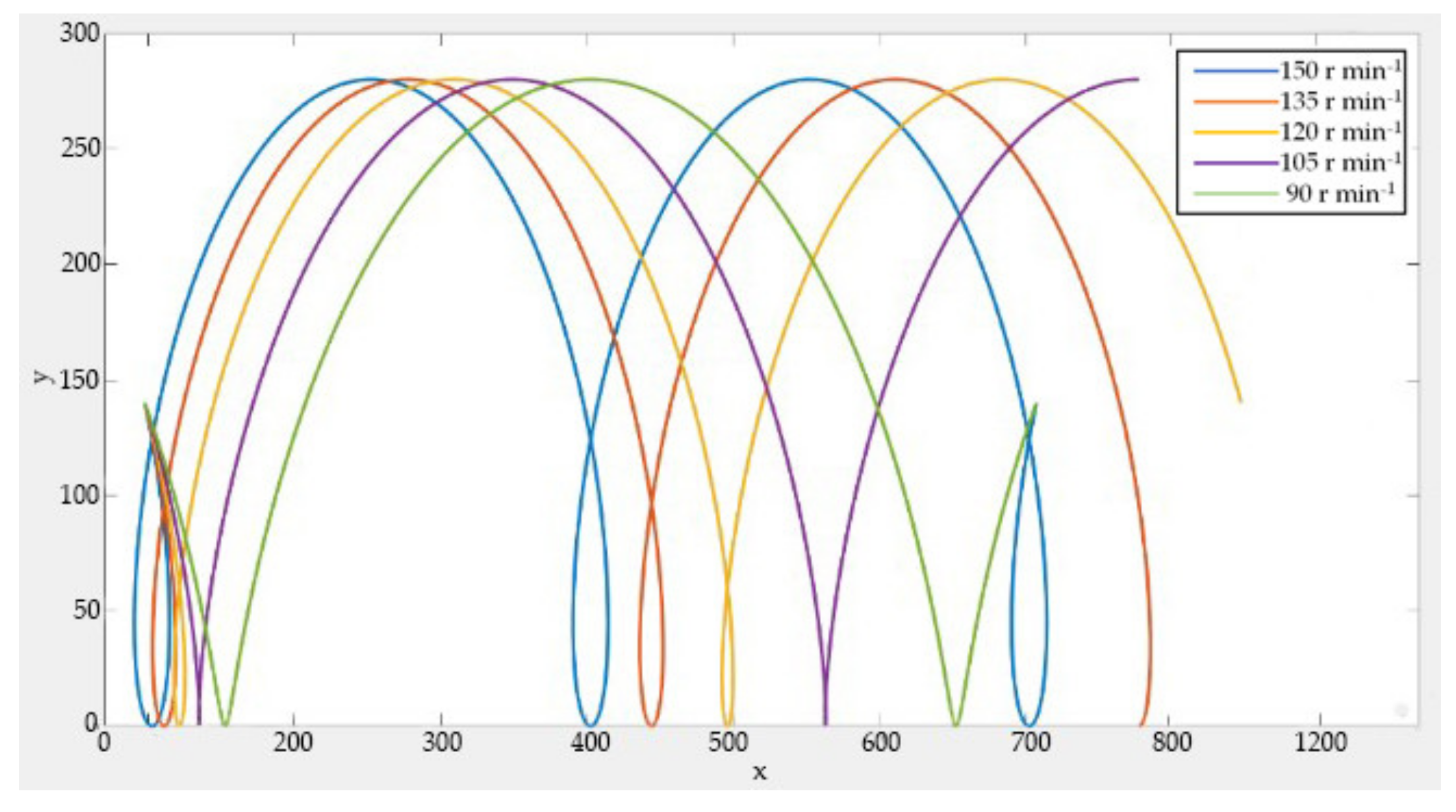
3.3. Effect of Forward Speed and Drilling Speed on Hole Width and Hole Spacing
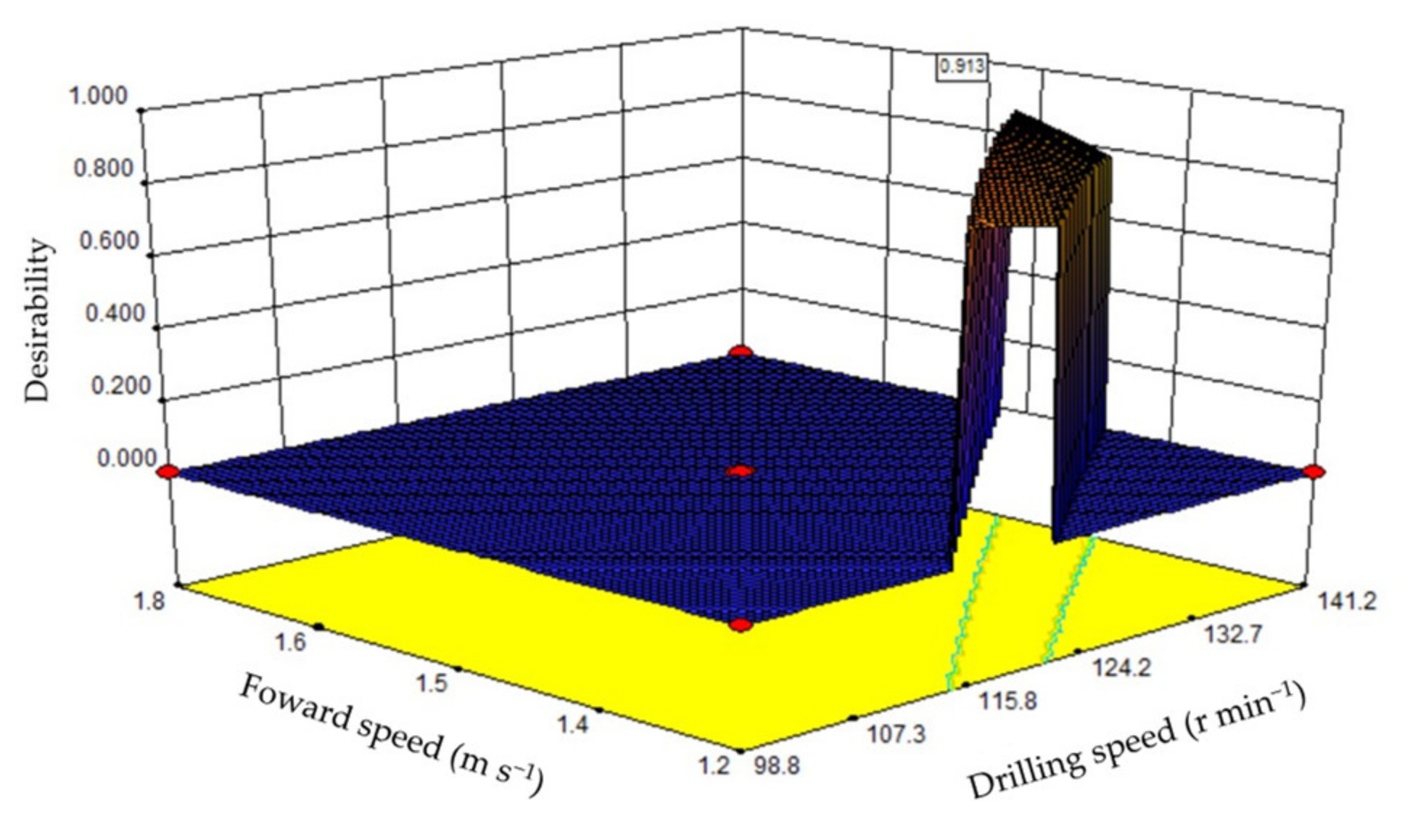
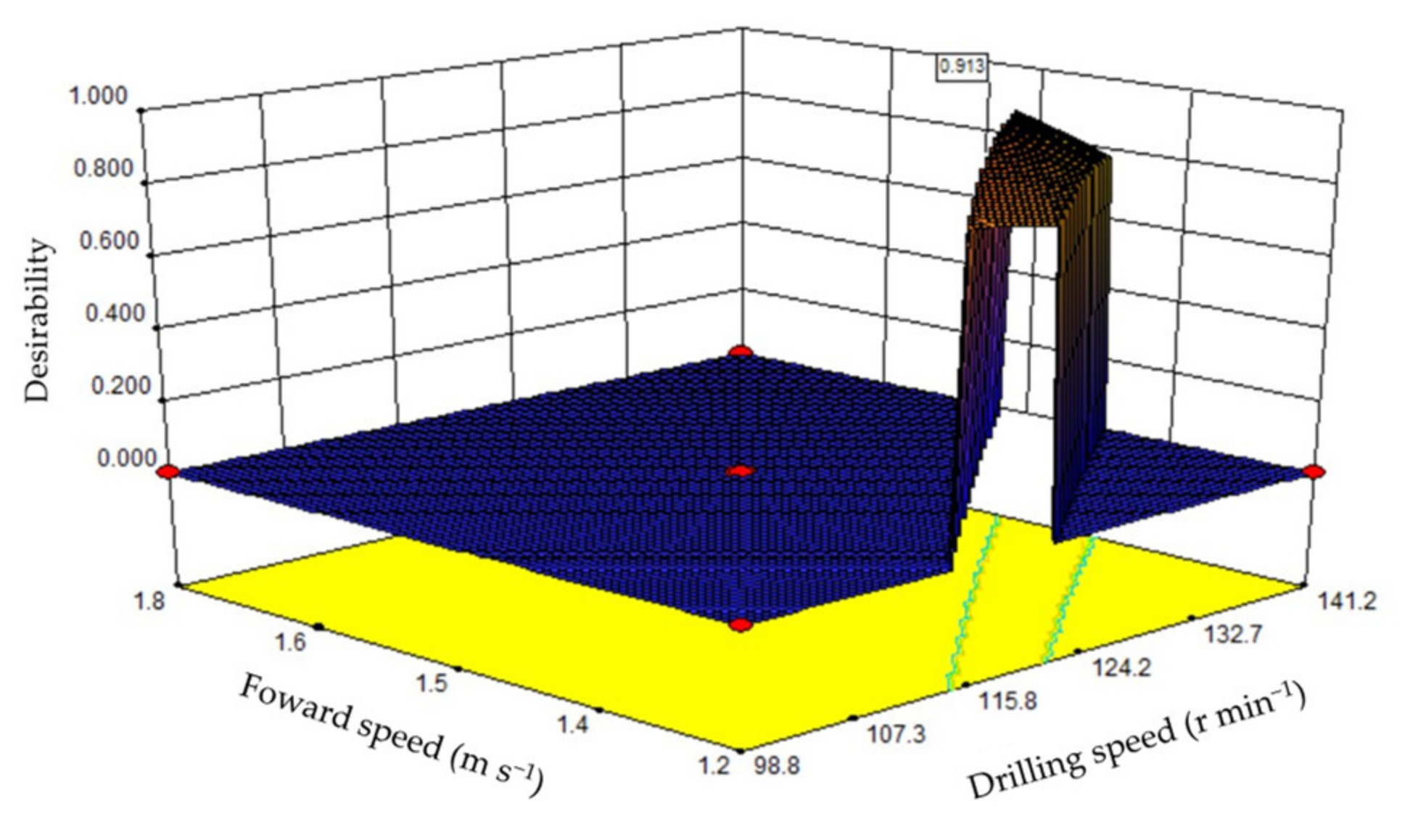
3.4. Parameter Optimization Test Results
3.5. Response Surface Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hong, H.; Zhang, Y.; Chen, W.; Zhao, H. Present research situation and perspective of corn topdressing machinery in China. J. Maize Sci. 2016, 24, 147–152. [Google Scholar]
- Zeng, X.; Peng, Z.; Peng, Y. Structural equation model analyzing relationship among N application-carbonhydrate product-grain yield of maize. Trans. Chin. Soc. Agric. Eng. 2016, 32, 98–104. [Google Scholar]
- Zhan, L.; Yang, H.; Lei, H. Analysis of corn water consumption, carbon assimilation and ecosystem water use efficiency based on flux observations. Trans. Chin. Soc. Agric. Eng. 2016, 32, 88–93. [Google Scholar]
- Hu, H.; Li, H.; Wang, Q.; He, J.; Zhang, Y.; Chen, W.; Wang, X. Design and experiment of targeted hole-pricking and deep-application fertilizer applicator between corn rows. Trans. Chin. Soc. Agric. Eng. 2016, 32, 26–35. [Google Scholar]
- de Castro, S.G.Q.; Decaro, S.T.; Franco, H.C.J.; Graziano Magalhães, P.S.; Garside, A.; Mutton, M.A. Best practices of nitrogen fertilization management for sugarcane under green cane trash blanket in Brazil. Sugar Tech 2017, 19, 51–56. [Google Scholar] [CrossRef]
- Zou, H.; Fan, J.; Zhang, F.; Xiang, Y.; Wu, L.; Yan, S. Optimization of drip irrigation and fertilization regimes for high grain yield, crop water productivity and economic benefits of spring maize in Northwest China. Agric. Water Manag. 2020, 230, 105986. [Google Scholar] [CrossRef]
- Çetin, Ö.; Akalp, E. Efficient use of water and fertilizers in irrigated agriculture: Drip irrigation and fertigation. Acta Hortic. Et Regiotect. 2019, 22, 97–102. [Google Scholar] [CrossRef] [Green Version]
- Nandede, B.; Raheman, H.; Deore, H. Selection of suitable furrow opener and furrow closer for vegetable transplanter. Agric. Mech. Asia Afr. Lat. Am. 2014, 45, 40–47. [Google Scholar]
- Rahman, S.; Chen, Y.; Lobb, D. Soil movement resulting from sweep type liquid manure injection tools. Biosyst. Eng. 2005, 91, 379–392. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, J.; Yin, H.; Zhang, Q.; Li, L.; Wang, Y. Effects of quantitative fertilization by a single plant on the yield, nutrient absorption, and utilization of summer maize. J. Agric. Resour. Environ. 2020, 37, 924–930. [Google Scholar]
- Zheng, Z.; Wang, T.; Liu, Z.; Wang, Q.; Zhao, H.; Liu, S. STUDY ON FILLING PERFORMANCE OF HOLE FERTILIZATION DEVICE AND OPTIMIZATION OF CAVITY. INMATEH-Agric. Eng. 2021, 64, 141–150. [Google Scholar] [CrossRef]
- Ulson, J.A.C.; Benez, S.H.; da Silva, I.N.; de Souza, A.N. An Intelligent System to Control the Fluid Fertilizer Application. In Proceedings of the 2002 ASAE Annual Meeting, Chicago, IL, USA, 28–31 July 2002; p. 1. [Google Scholar]
- O’Shaughnessy, S.A.; Evett, S.R.; Colaizzi, P.D. Dynamic prescription maps for site-specific variable rate irrigation of cotton. Agric. Water Manag. 2015, 159, 123–138. [Google Scholar] [CrossRef]
- Goldstein, A.; Fink, L.; Meitin, A.; Bohadana, S.; Lutenberg, O.; Ravid, G. Applying machine learning on sensor data for irrigation recommendations: Revealing the agronomist’s tacit knowledge. Precis. Agric. 2018, 19, 421–444. [Google Scholar] [CrossRef]
- Bianchini, A.; Valadão Junior, D.D.; Rosa, R.P.; Colhado, F.; Daros, R.F. Soil chiseling and fertilizer location in sugarcane ratoon cultivation. Eng. Agrícola 2014, 34, 57–65. [Google Scholar] [CrossRef] [Green Version]
- Otto, R.; Franco, H.C.J.; Faroni, C.E.; Vitti, A.C.; de Oliveira, E.C.A.; Sermarini, R.A.; Trivelin, P.C.O. The role of nitrogen fertilizers in sugarcane root biomass under field conditions. Agric. Sci. 2014, 5, 1527. [Google Scholar] [CrossRef] [Green Version]
- Karagöz, İ. Fertilization and Fertilizer Types. Appl. Soil Chem. 2021, 123–148. [Google Scholar] [CrossRef]
- Shahena, S.; Rajan, M.; Chandran, V.; Mathew, L. Conventional methods of fertilizer release. In Controlled Release Fertilizers for Sustainable Agriculture; Elsevier: Amsterdam, The Netherlands, 2021; pp. 1–24. [Google Scholar]
- Womac, A.; Tompkins, F. Probe-type injector for fluid fertilizers. Appl. Eng. Agric. 1990, 6, 149–154. [Google Scholar] [CrossRef]
- da Silva, M.J.; Franco, H.C.J.; Magalhães, P.S.G. Liquid fertilizer application to ratoon cane using a soil punching method. Soil Tillage Res. 2017, 165, 279–285. [Google Scholar] [CrossRef]
- Wang, J.; Ji, W.; Feng, J. Design and experimental investigation of the liquid fertilizer applicator. Trans. Chin. Soc. Agric. Eng. 2008, 24, 157–159. [Google Scholar]
- Wang, J.; Pan, Z.; Zhou, W.; Wang, J.; He, J.; Lang, C.; University, N.A. Design and Test of SYJ-2 Type Liquid Variable Fertilizer. Trans. Chin. Soc. Agric. Mach. 2015, 46, 53–58. [Google Scholar]
- Wang, J.; Liu, Y.; Wang, J.; He, J. Optimization design and experiment of liquid-fertilizer applying deep-fertilization mechanism for planetary elliptic gears. Trans. Chin. Soc. Agric. Mach. 2012, 43, 60–65. [Google Scholar]
- Yu, Y.; Luo, C.; Yu, G.; Zhao, X.; Yu, T. Parameters optimization of pick-up mechanism of planetary gear train with ellipse gears and incomplete non-circular gear. Trans. Chin. Soc. Agric. Mach. 2013, 44, 62–68. [Google Scholar]
- Chen, J.; Huang, Q.; Wang, Y.; Zhang, G. Kinematics modeling and analysis of transplanting mechanism with planetary elliptic gears for pot seedling transplanter. Trans. Chin. Soc. Agric. Eng. 2012, 28, 6–12. [Google Scholar]
- Jagannath, R.; Naresh, N.; Pandey, K. Studies on pressure loss in sudden expansion in flow through nozzles: A fuzzy logic approach. ARPN J. Eng. Appl. Sci. 2007, 2, 50–61. [Google Scholar]
- Tassone, A.; Caruso, G.; Del Nevo, A. Influence of PbLi hydraulic path and integration layout on MHD pressure losses. Fusion Eng. Des. 2020, 155, 111517. [Google Scholar] [CrossRef]
- Quaglia, G.; Nisi, M. Design of a self-leveling cam mechanism for a stair climbing wheelchair. Mech. Mach. Theory 2017, 112, 84–104. [Google Scholar] [CrossRef]
- Zhou, C.; Hu, B.; Chen, S.; Ma, L. Design and analysis of high-speed cam mechanism using Fourier series. Mech. Mach. Theory 2016, 104, 118–129. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, T.; Wang, P.; Huang, H.; Zhang, N.; Chen, N. Mathematical modeling and optimization of cam mechanism in delivery system of an offset press. Mech. Mach. Theory 2017, 110, 100–114. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, W.; Bai, H.; Wang, J.; Huang, H.; Wang, Z. Design and experiment of differential-type bidirectional distribution device for fertilizer supply for deep-fertilizer liquid fertilizer application. Trans. Chin. Soc. Agric. Mach. 2018, 49, 105–111. [Google Scholar]
- Wang, J.; Pan, Z.; Yang, X.; Liu, Y.; Zhang, C.; Wang, J. Design and experiment of rotary converter of liquid fertilizer. Trans. Chin. Soc. Agric. Mach. 2014, 45, 110–165. [Google Scholar]
- Da Silva, M.; Magalhães, P. Modeling and design of an injection dosing system for site-specific management using liquid fertilizer. Precis. Agric. 2019, 20, 649–662. [Google Scholar] [CrossRef]
- Fuadi, M.; Sutiarso, L.; Virgawati, S.; Nugraheni, P. Design of liquid fertilizer applicator based on Variable Rate Application (VRA) for Soybean. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Moscow, Russia, 27 May–6 June 2019; p. 012009. [Google Scholar]
- Chen, J.; Huang, Q.; Wang, Y.; Sun, L.; Zhao, X.; Wu, C. Parametric analysis and inversion of transplanting mechanism with planetary non-circular gears for potted-seedling transplanter. Trans. Chin. Soc. Agric. Eng. 2013, 29, 18–26. [Google Scholar]
- Zhao, X.; Chen, J.; Wang, Y.; Zhao, Y.; Li, C. Reverse design and analysis of rice seedling transplanter with D-shape static trajectory. Trans. Chin. Soc. Agric. Eng. 2012, 28, 92–97. [Google Scholar]
- Wu, R.; Zhang, L.; Qian, F.; Cai, H. Design and simulation of cave-fertilizer apparatus for maize. J. Anhui Agric. Univ. 2017, 44, 941–946. [Google Scholar]
- Hoshyarmanesh, H.; Dastgerdi, H.R.; Ghodsi, M.; Khandan, R.; Zareinia, K. Numerical and experimental vibration analysis of olive tree for optimal mechanized harvesting efficiency and productivity. Comput. Electron. Agric. 2017, 132, 34–48. [Google Scholar] [CrossRef]
- Xu, G.; Jian, S.; Song, Y.; Fang, H.; Qiu, X.; Ming, X. Design and Experiment of Cellular Cavitation Mechanism for Crops of Hilly Mountains Transplante. Trans. Chin. Soc. Agric. Mach. 2022, 53, 105–113, 125. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Specifications | Function |
|---|---|---|
| Fertilizer measuring container | 1500 mL | Obtain fertilizer from the fertilizer spray needle |
| Funnel | D-100 mm | Preventing fertilizer from overflowing from the measuring cylinder when measuring |
| Syringes | 30 mL | Accurate acquisition of the residual fertilizer in the fertilizer measuring container |
| Stopwatch | Precision-0.01 s | Measurement of fertilizer injecting time |
| Measuring cylinder | 200 mL | Measuring the volume of fertilizer |
| Liquid fertilizer | Urea ammonium nitrate solution (1%) | Test drug |
| Cone Index (MPa) | Soil Bulk Density (g cm−3) | Soil Water Content (%) | Soil Temperature (°C) | Depth (mm) | pH |
|---|---|---|---|---|---|
| 0.8 | 1.29 | 13.50 | 25.47 | 80 | 7.14 |
| Code Number | Drilling Speed (r min−1) | Forward Speed (m s−1) |
|---|---|---|
| +1.414 | 150.0 | 1.9 |
| +1 | 141.2 | 1.8 |
| 0 | 120.0 | 1.5 |
| −1 | 98.8 | 1.2 |
| −1.414 | 90.0 | 1.1 |
| Liquid Fertilizer Pump Pressure (Mpa) | Amount of Fertilizer | ||||
|---|---|---|---|---|---|
| (mL) | |||||
| First | Second | Third | Fourth | Fifth | |
| 0.2 | 13.8 | 13.7 | 14.1 | 13.6 | 13.6 |
| 0.3 | 19.6 | 19.4 | 19.2 | 19.0 | 19.2 |
| 0.4 | 22.4 | 22.7 | 22.1 | 21.9 | 22.7 |
| No. | Pressure (MPa) | |||||
|---|---|---|---|---|---|---|
| 0.2 | 0.3 | 0.4 | ||||
| Volume (mL) | Time (s) | Volume (mL) | Time (s) | Volume (mL) | Time (s) | |
| First | 852.7 | 4.96 | 1040.4 | 4.91 | 1207.0 | 5.05 |
| Second | 846.4 | 5.00 | 1025.7 | 4.96 | 1204.1 | 5.12 |
| Third | 851.6 | 5.11 | 1021.5 | 5.02 | 1198.3 | 5.10 |
| Fourth | 856.8 | 4.91 | 1018.4 | 5.04 | 1197.5 | 4.96 |
| Fifth | 850.7 | 5.01 | 1021.8 | 5.02 | 1203.6 | 5.02 |
| Total | 4258.2 | 24.99 | 5127.8 | 24.95 | 6010.5 | 25.25 |
| No | Test Factors | Performance Indicator | ||
|---|---|---|---|---|
| X1-Drilling Speed (r min−1) | X2-Forward Speed (m s−1) | Y1-Hole Width (mm) | Y2-Hole Spacing (mm) | |
| 1 | −1 | −1 | 39.6 | 363.7 |
| 2 | 1 | −1 | 66.6 | 255.4 |
| 3 | −1 | 1 | 99.7 | 544.4 |
| 4 | 1 | 1 | 40.9 | 383.3 |
| 5 | −1.414 | 0 | 83.2 | 499.7 |
| 6 | 1.414 | 0 | 54.1 | 300.9 |
| 7 | 0 | −1.414 | 60.9 | 274.2 |
| 8 | 0 | 1.414 | 74.5 | 475.0 |
| 9 | 0 | 0 | 38.2 | 375.0 |
| 10 | 0 | 0 | 41.3 | 372.1 |
| 11 | 0 | 0 | 36.1 | 376.0 |
| 12 | 0 | 0 | 38.6 | 379.0 |
| 13 | 0 | 0 | 35.1 | 371.2 |
| 14 | 0 | 0 | 33.3 | 376.3 |
| 15 | 0 | 0 | 35.3 | 372.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, W.; Wen, N.; Liu, Z.; Wang, Q.; Tang, H.; Wang, J.; Wang, J. Research on an Efficient Deep-Hole Application Method for Liquid Fertilizer Based on Alternate Drilling. Processes 2022, 10, 1320. https://doi.org/10.3390/pr10071320
Zhou W, Wen N, Liu Z, Wang Q, Tang H, Wang J, Wang J. Research on an Efficient Deep-Hole Application Method for Liquid Fertilizer Based on Alternate Drilling. Processes. 2022; 10(7):1320. https://doi.org/10.3390/pr10071320
Chicago/Turabian StyleZhou, Wenqi, Nuan Wen, Ziming Liu, Qi Wang, Han Tang, Jinwu Wang, and Jinfeng Wang. 2022. "Research on an Efficient Deep-Hole Application Method for Liquid Fertilizer Based on Alternate Drilling" Processes 10, no. 7: 1320. https://doi.org/10.3390/pr10071320
APA StyleZhou, W., Wen, N., Liu, Z., Wang, Q., Tang, H., Wang, J., & Wang, J. (2022). Research on an Efficient Deep-Hole Application Method for Liquid Fertilizer Based on Alternate Drilling. Processes, 10(7), 1320. https://doi.org/10.3390/pr10071320