1. Introduction
In recent years, against the background of demographic change, a variety of technologies and services for older people have been developed in various projects [
1,
2,
3], so-called Ambient or Active Assisted Living systems (AAL for short). AAL is an umbrella term for a variety of systems ranging from wearable devices and cameras to non-invasive solutions [
4,
5] that promote quality aging in the digital age. However, it has become apparent that many of these technologies require training [
6,
7,
8]. Due to the retirement of baby boomers (in Austria, the cohorts 1956 to 1969 [
9]), the number of persons of working age is decreasing and the number of inactive persons is increasing [
10]. The Elderly Dependency Ratio (EDR), a measure capturing the ratio of the number of old adults (over 65 years of age) to productive adults (between 15 and 64 years of age), has increased by 6.2% in EU Member States in the last decade [
11] and is projected to reach 57% by 2100 [
12], which is about twice the value calculated for 2021 (32.5%).
The working lives of the baby boomers were and are characterized by the information age [
13]. Therefore, it can be assumed that they are more familiar with technology, unlike the generations before them. Statistics show that a growing number of them have been involved with technological systems, including social media and online resources, in recent years [
14]. Particularly, the baby boomer generation would be able to use and benefit from new technologies that support them in aging if trained properly. In Germany and Austria, for example, around 90% of 55- to 64-year-olds use a smartphone [
15,
16]. This translates to the fact that more people may want to use new technologies in the future to support them in aging, but due to the demographic change, fewer people will be available to train them.
In this respect, social robots bear great potential to address this issue in the future. Social robots can be described as artificial agents with the characteristics of humans or animals [
17]. They are currently already used in education, particularly in teaching technical skills, especially to children and young people [
18]. With respect to older people, they have so far been used mainly in long-term care settings and for people with dementia, focusing on nursing homes and community dwellings [
17,
19]. More precisely, the use of coaching robots for older people is an active area of research with the goal of improving their quality of life and independence. In this regard, a study conducted in North America demonstrated that older adults have preferences for robot assistance when it comes to tasks related to chores, manipulating objects and information management [
20]. In addition, recent research emphasizes the need to consider the fears and desires of target users before introducing social robots [
21]. These studies highlight the importance of user perceptions when it comes to realizing the full potential of social robots and show that negative perceptions could be a barrier to the success of this technology. However, studies with real robots show good acceptance. An example of this is the study presented in [
22], in which an assistive robot was used to aid seven patients with mild cognitive impairment over a period of 118 days. This has also been highlighted in similar studies evaluating the effect of social robots on older adults’ motivation to engage in physical exercises [
23,
24]. Another study evaluating the readiness of older adults to use social robots was presented in [
25], highlighting that social robots are perceived as futuristic technology to be used in the future, but less likely in the present. This demonstrates an important gap between studies involving real robots and studies only reporting subjective opinions of older adults. It is not clear whether these perceptions/opinions have a direct effect on the potential of using social robots and no clear answers can be found in the literature about if these perceptions are affected by the fact that older adults are less familiar with robots. Therefore, there are several challenges and limitations that need to be considered when developing and implementing these robots.
One of the main challenges is to ensure that the robots are easy to use and can be understood by older people. This includes designing user-friendly interfaces and providing clear instructions and feedback [
26,
27]. Another challenge is adapting robots to the individual needs and preferences of older adults [
27]. This could also include the development of personalized interfaces [
26] that, for example, allow coaching robots to perceive learning progress or even adapt to the user’s learning pace. [
20] Furthermore, there is a need for evaluating the effectiveness of the robots, both in terms of their technical capabilities [
26,
27] and their impact on the quality of life of older people. Overall, while the use of coaching robots for older people has the potential to improve their quality of life and independence, it is important to carefully consider these challenges and limitations when developing and implementing these robots. In addition, there is little evidence for the case of younger seniors and technology education/training. Moreover, in some cases, real robots were not used [
28], making it difficult to assess the actual perception of seniors towards this technology and thus leading to limited conclusions.
The European AgeWell [
29] project addressed, among other things, the question of whether social robots can help train younger seniors (the baby boomer generation) in new technologies in the future, thus ensuring their digital connectivity. This paper therefore investigates the general perception as well as the real interaction with a social coaching robot in the baby boomer generation (older employees and people just retired). In the present study, we therefore examined the use of a coaching robot in training sessions and described participants’ perceptions and experiences of interacting with the robot. Specifically, we observed participants’ expectations before using the robot and their perceived ease of use and experience after interacting with the robot. To achieve the goals of the study, we used a real robot coach (robo-coach) with software developed specifically to support the target group of participants.
The remainder of the paper is structured as follows:
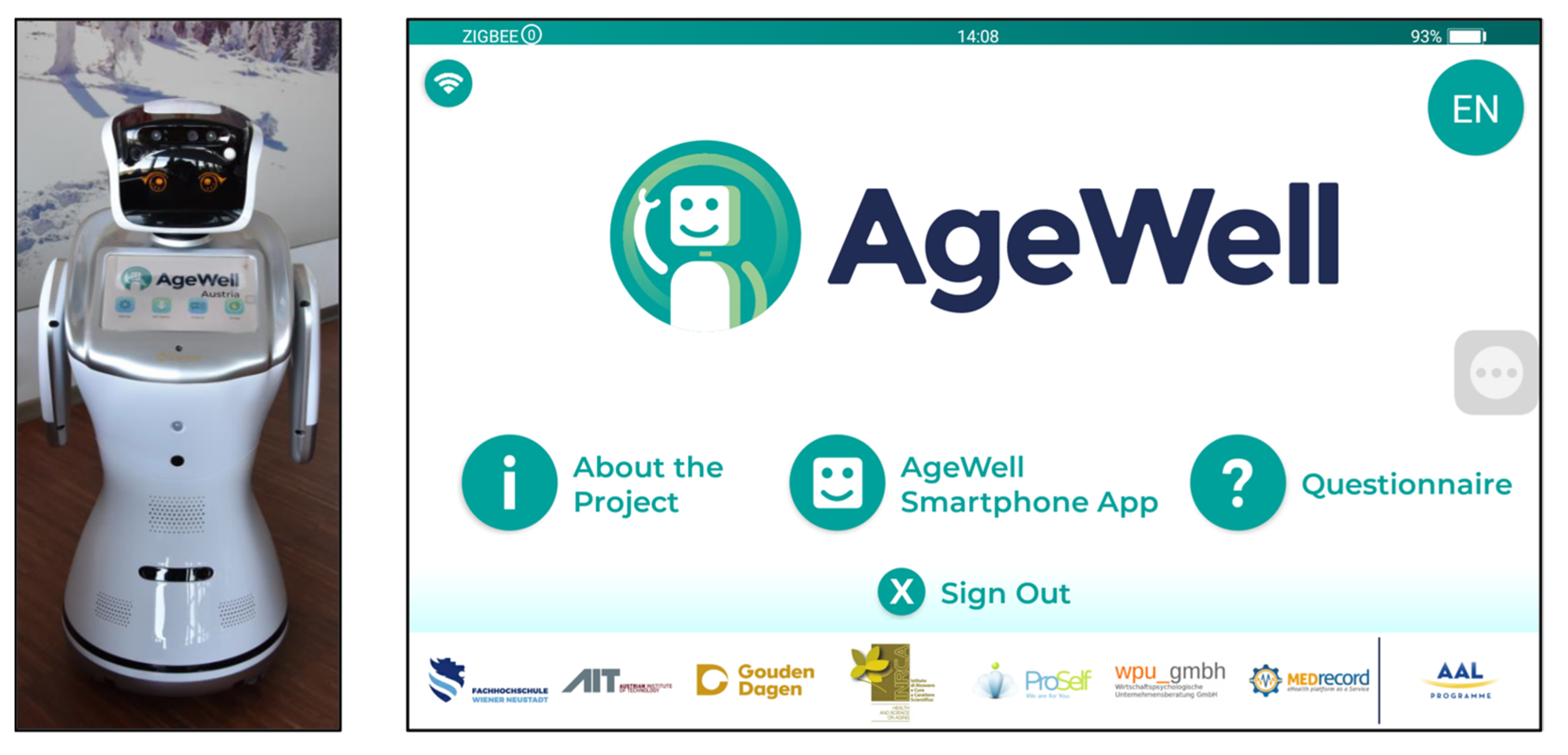
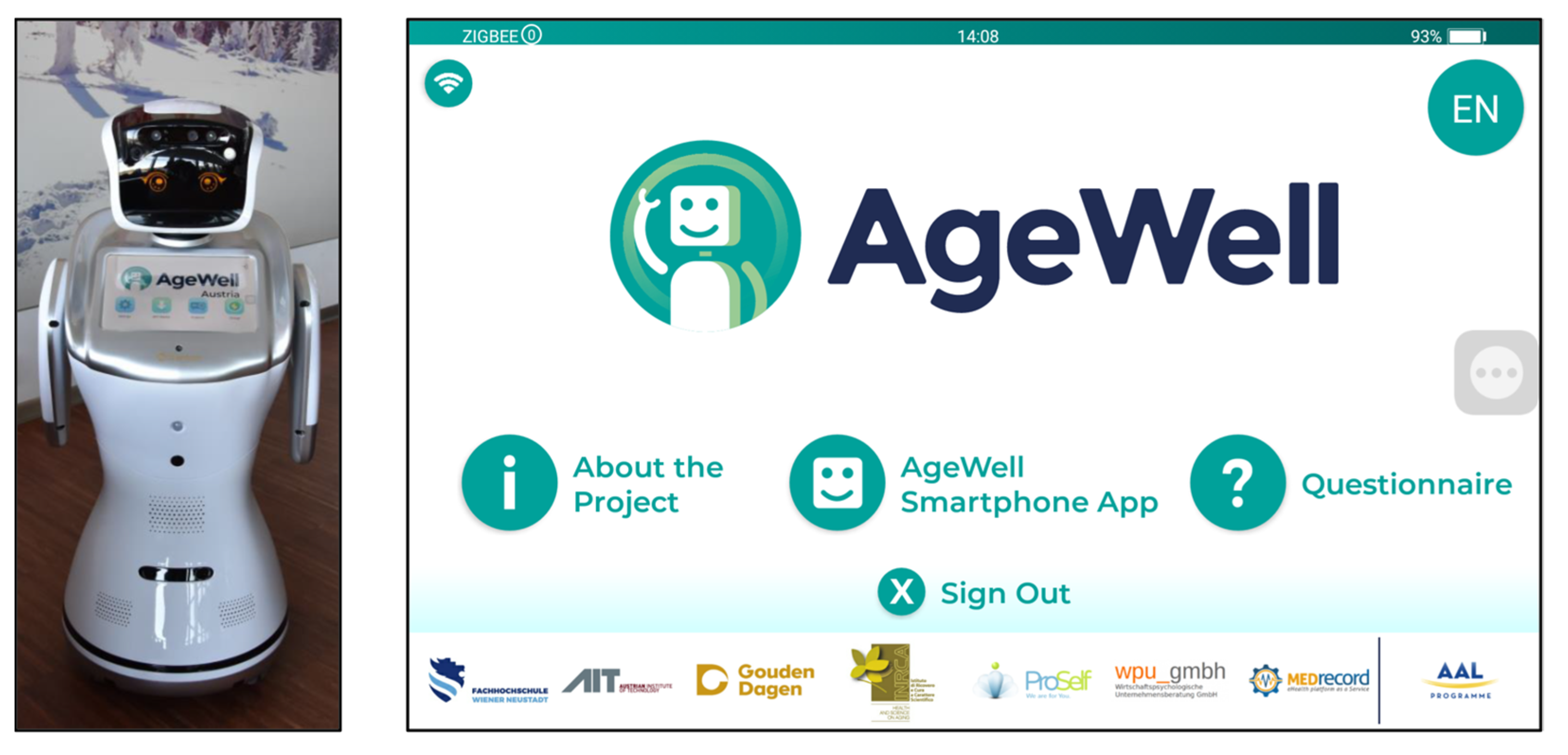
Section 2 introduces the robo-coach developed in the AgeWell project,
Section 3 describes the study design and the different aspects investigated, including recruitment strategy and the methods for data collection,
Section 4 presents the results, in
Section 5 the results are discussed, and
Section 6 provides a conclusion.
3. Methods
This paper aims to investigate the general perception as well as the real interaction with the robo-coach in the baby boomer generation. Thus, a study was conducted to examine the use of the robo-coach in training sessions to describe participants’ perceptions and experiences of interacting with the robo-coach. Particularly, the participants’ expectations before using the robo-coach and their perceived ease of use and experience after interacting with the robo-coach are examined.
3.1. Study Design
The study was conducted with 34 participants in Lower Austria in September 2020. The study (including the informed consents) was reviewed and approved by the independent ethics board of the University of Applied Sciences Wiener Neustadt (17/08/2020; chairperson: Nimmerichter Alfred).
We focused on white-collar workers in good health (no limitations in mobility or cognition) in transition to retirement (baby boomers). In the process, we targeted two target groups (i) white-collar workers who are currently employed but close to retirement age, i.e., 55 years or older (maximum three years before retirement), and (ii) white-collar workers who have just retired (in the last three years) and are 55 years or older. They also had to be interested in the project and be able to sign a consent form. Furthermore, the aim was to involve both groups (employed and retired) in equal numbers. Recruitment was carried out through business networks, clubs and personal contacts. As a COVID-19 wave was just building up in September 2020, measures were developed for the implementation of the study: (i) participants had to wear a mask, (ii) handshaking was avoided and (iii) all devices were disinfected after each participant.
3.2. Intervention
The intervention took place in a usability lab and was scheduled for 60 min per participant. Demographic data, affinity for technology, and expectations of participants with respect to the robot were collected prior to the intervention using a paper-pencil survey (
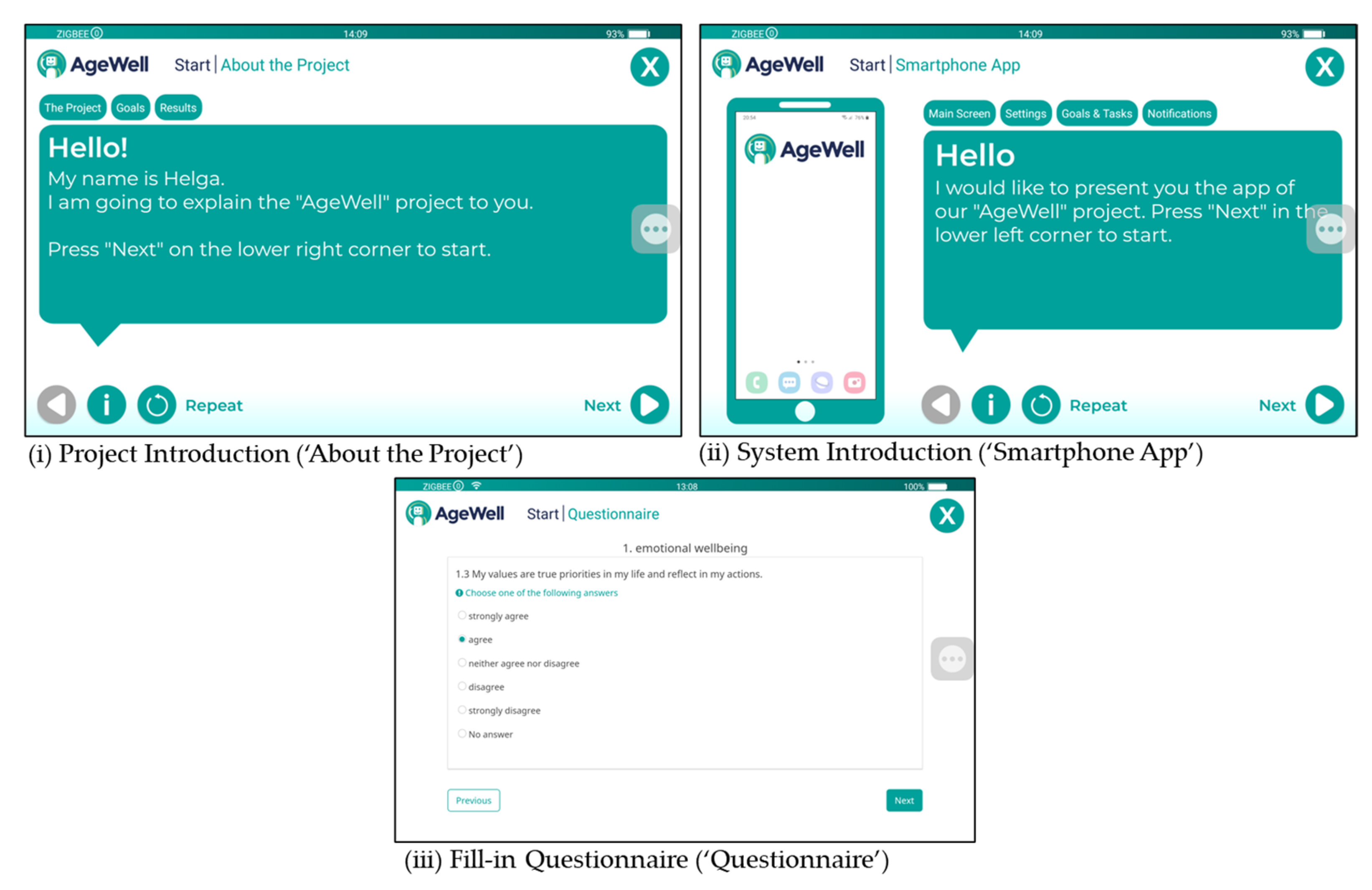
Table 1). The intervention with the robot—‘Project Introduction’, ‘System Introduction’ and ‘Questionnaire’—lasted between 30 and 40 min. After the intervention, participants’ perceptions were examined (perceived ease of use and user experience of the robot) using a paper-pencil survey.
The intervention process can be summarized in six steps: (i) demographic data were collected by people accompanying the study, (ii) participants filled-in a pre-intervention survey concerning their expectations about the robot, (iii) participants received a short introduction into how to use the robot and the three functions by people accompanying the study, (iv) participants used the robot themselves without support (if support was needed, this was documented by people accompanying the study), (v) participants filled-in a post-intervention survey and (vi) people accompanying the study asked participants questions about the project and had them perform simple tasks with the ECA to see if the functions ‘Project Introduction’ and ‘System Introduction’ were successfully used.
At this point, we note that people accompanying the study in the final step of the intervention only took notes on the correct or incorrect performance of the tasks and did not conduct interviews.
3.3. Measures
To investigate the general perception as well as the real-life interaction of the study participants with the robo-coach, recognized measures and adaptations thereof were used.
Table 1 gives an overview of the measures used in the four surveys. The most important aspects and adaptions of the measures are described in the following.
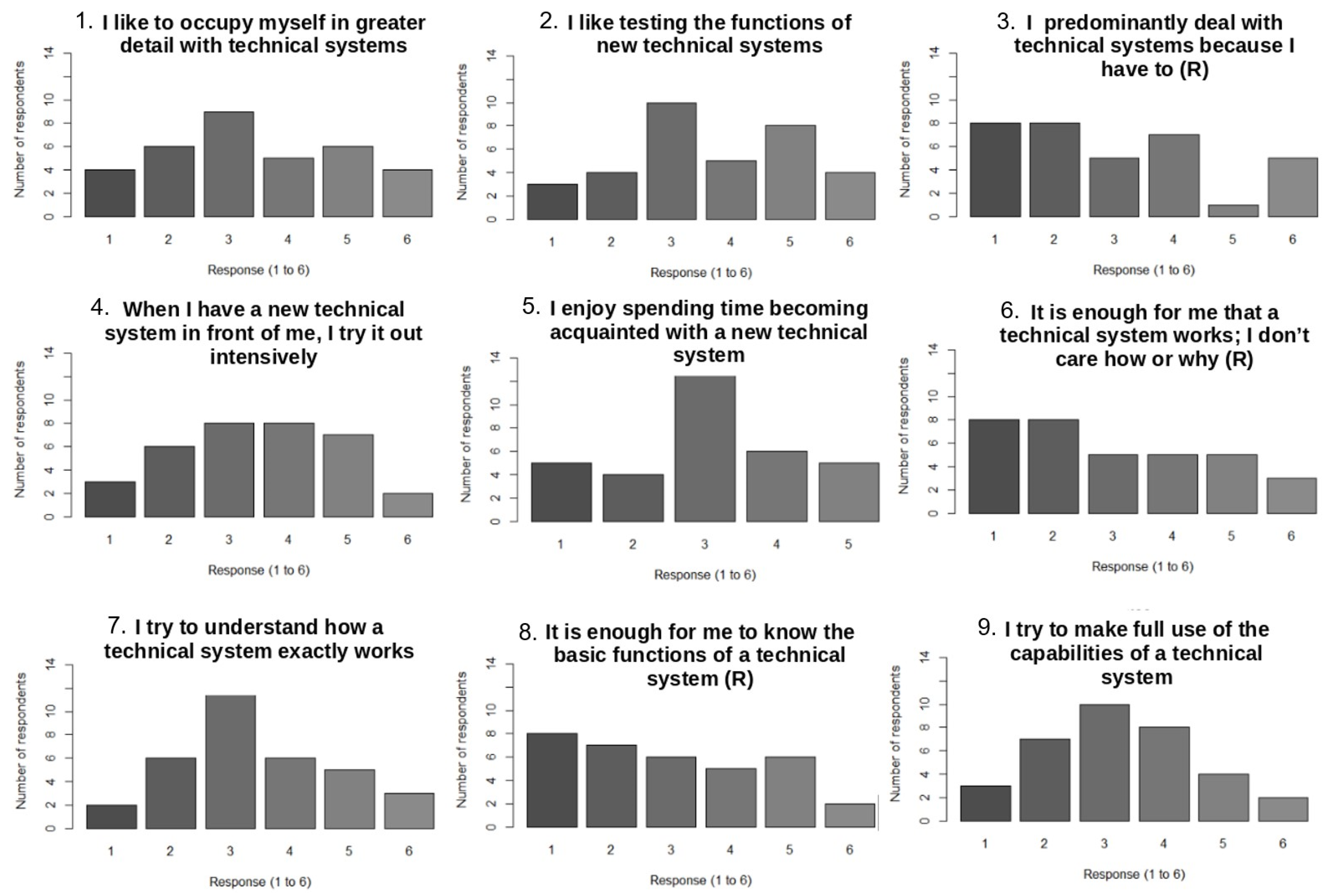
3.3.1. Affinity for Technology (ATI) Scale
This scale assesses the user’s affinity for technology interaction. It is used, among other things, to characterize user diversity in system usability tests [
17]. Although there are several scales available to measure technology affinity, we chose the ATI scale because, with only nine items, it provides a good balance between the factors of time, homogeneity, and clarity.
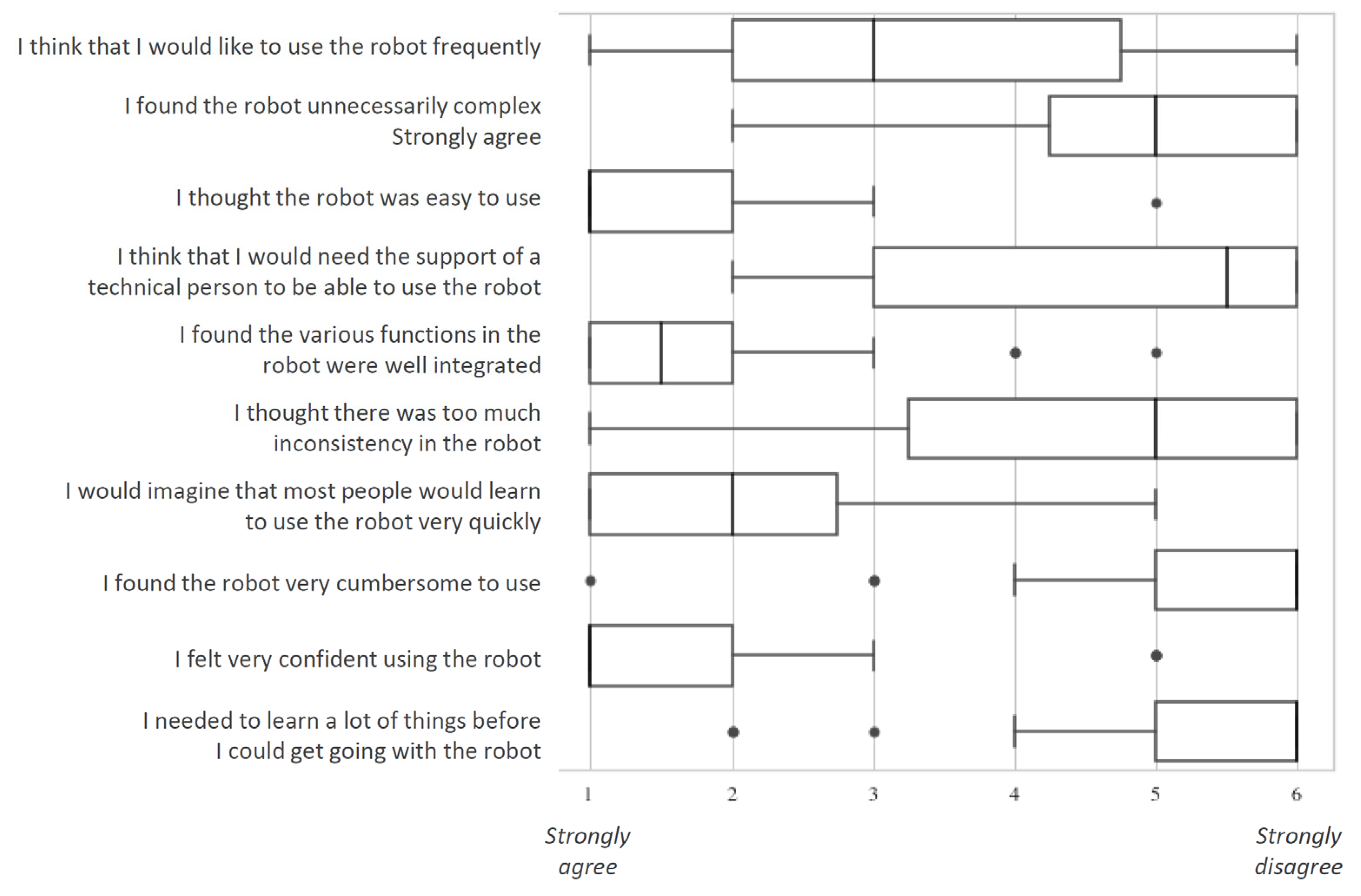
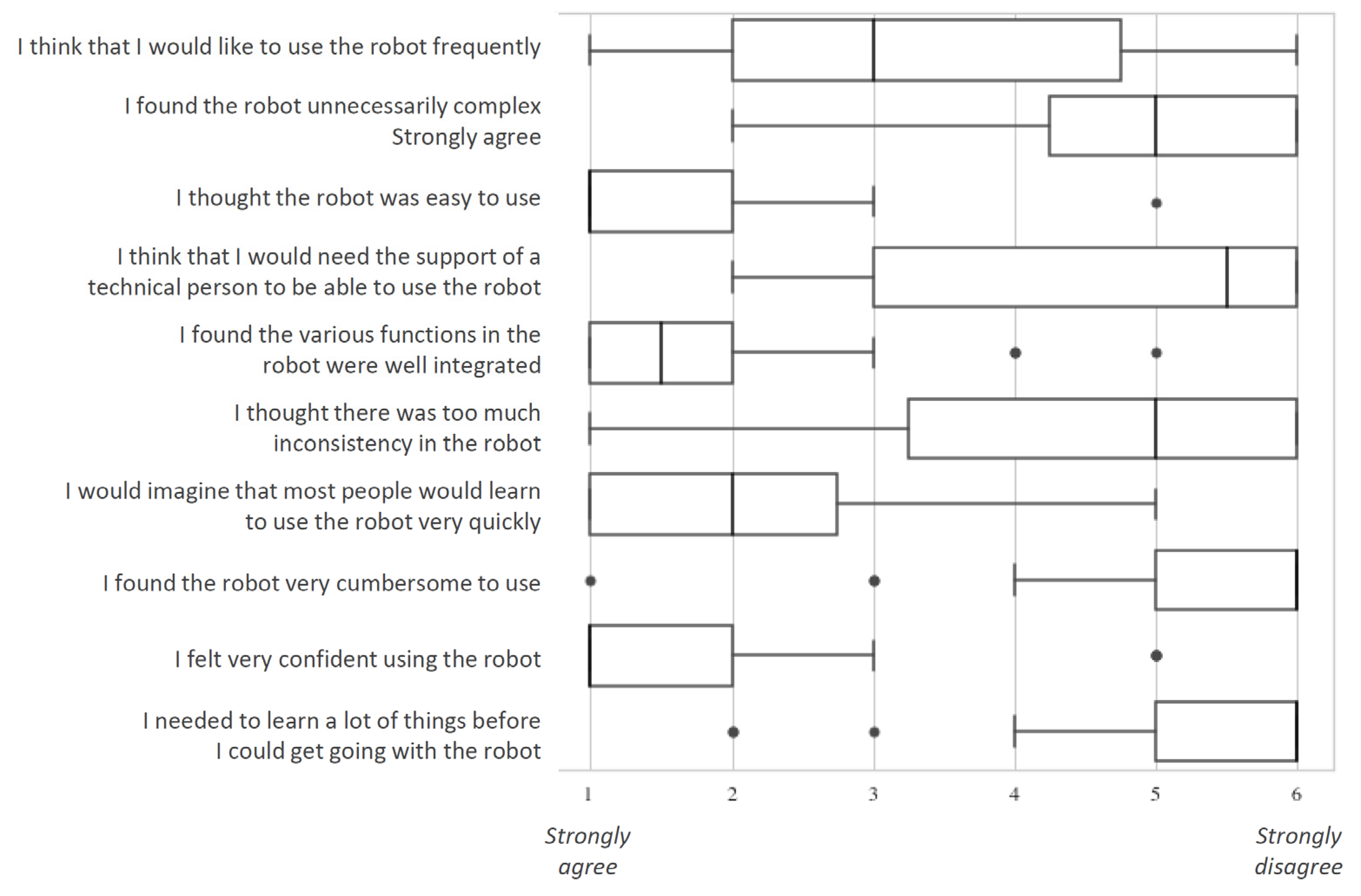
3.3.2. System Usability Scale (SUS)
To quantify the usability as perceived by the participants, a system usability scale (SUS) was used. The SUS is composed of ten items on a five-point Likert scale [
37,
38,
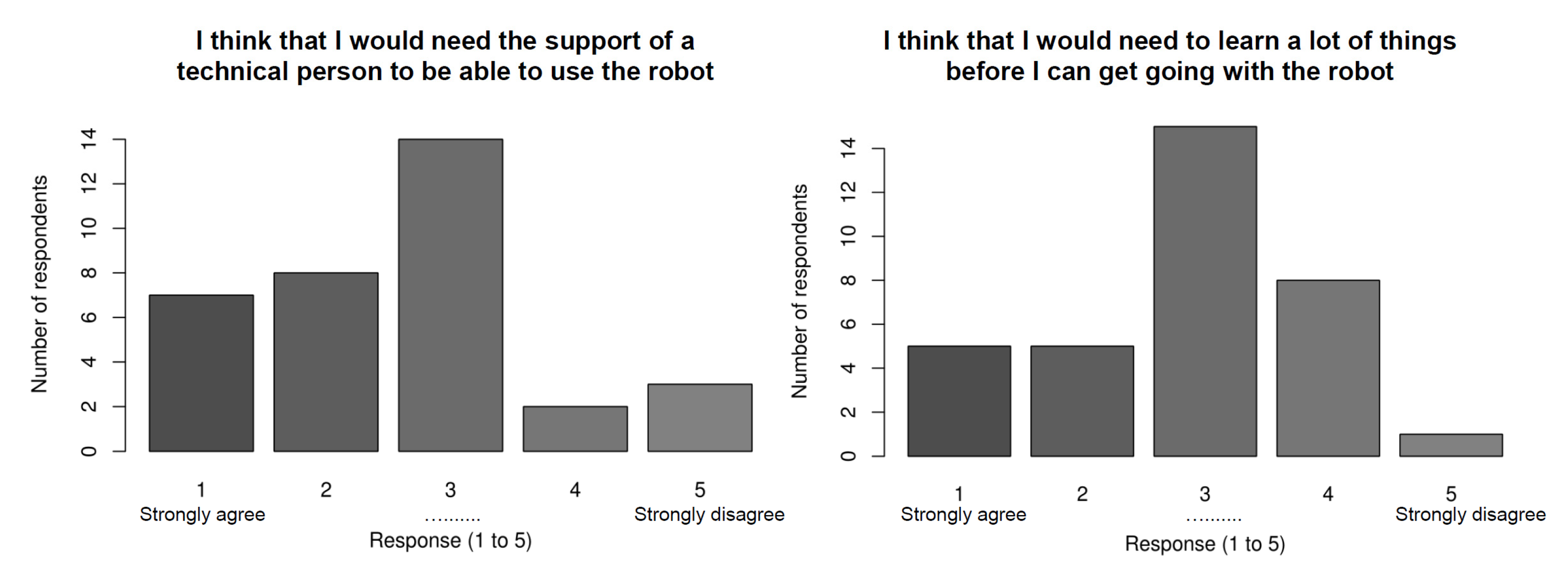
39]. To account for possible bias due to lack of attention when completing the questionnaire, the scale alternates between positive and negative items. The items in the scale represent a series of positive sentences that participants can strongly agree or strongly disagree with. For our study we used SUS at two different times, before and after the first interaction with the robot. Before the interaction, we used two adapted questions to obtain an idea of what participants think about support needs and learnability when they first see the robot:
I think that I would need the support of a technical person to be able to use the robot. (Adapted question number 4 of the SUS)
I think that I would need to learn a lot of things before I can get going with the robot. (Adapted question number 10 of the SUS)
After the first interaction with the robot, we used all ten items of SUS.
3.3.3. User Experience Questionnaire UEQ Short Version
We planned the use of UEQ before and after the first interaction with the robot to measure the impact of the interaction on participants’ opinions. To keep within the planned time frame of 60 min for each study participant, we decided to use UEQ short (UEQ-S). It consists of only 8 items instead of 26 items using a 7-point Likert scale and focuses on measuring the two dimensions of pragmatic and hedonic quality [
40,
41,
42].
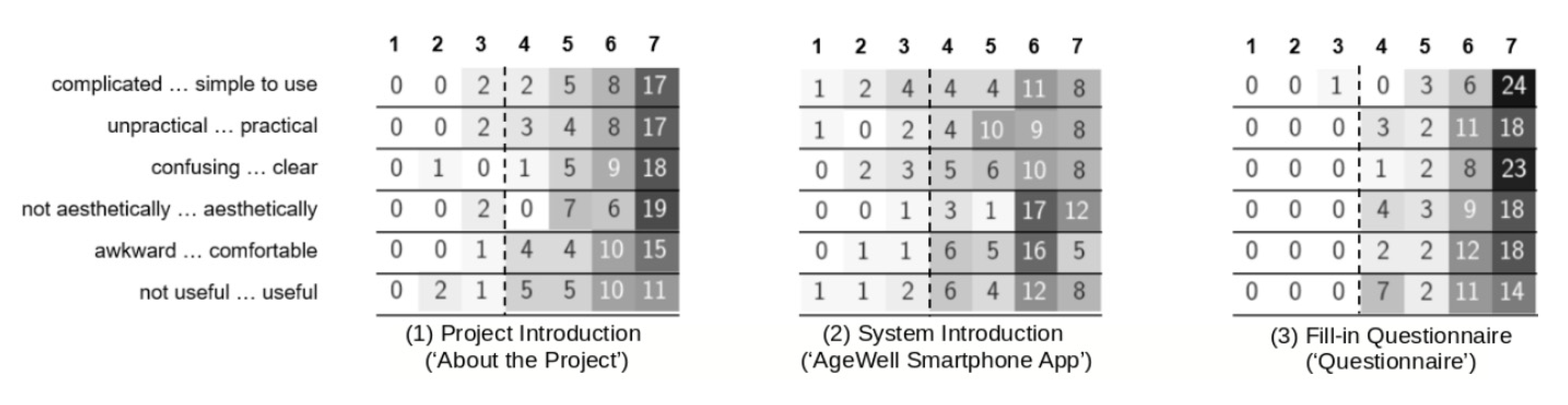
3.3.4. AttrakDiff (Adapted)
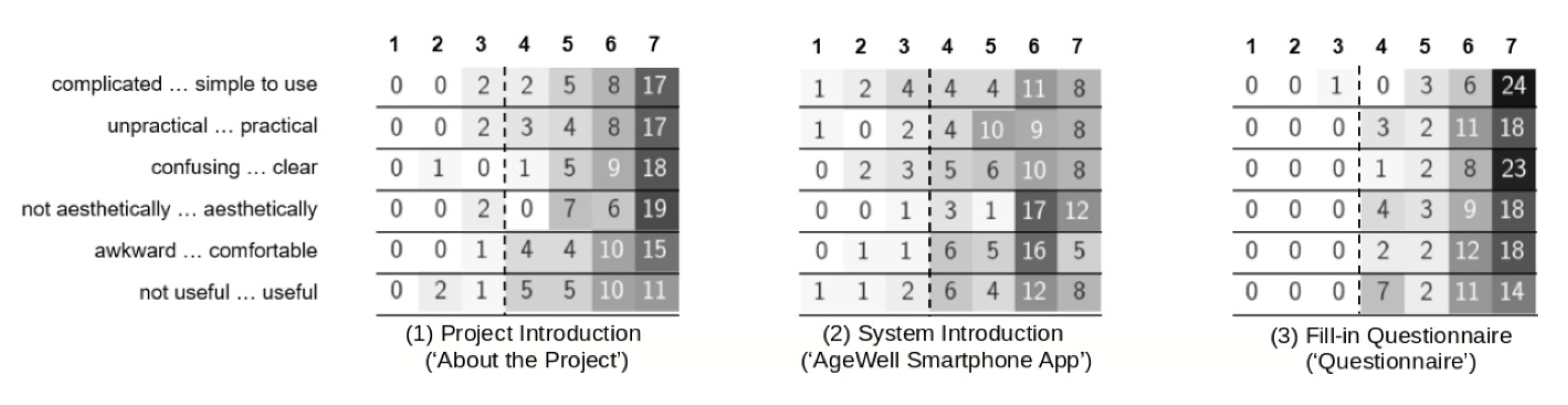
For measuring the attractiveness of the three functions of the robo-coach we used an adapted short version of the AttrakDiff questionnaire with six items [
43,
44] using a 7-point Likert scale. This questionnaire was used in the post-intervention survey.
3.3.5. Tasks/Questions to Check if the Training Has Worked
To assess whether the participants understood the content of the ‘Project Introduction’, we asked three comprehension questions with predefined answer options (five each) and one open question. To check whether the ‘System Introduction’ works, we prepared nine tasks that the participants had to solve with the ECA after the training in front of the study accompanists.
5. Discussion
AAL systems are designed to help older people manage their everyday lives. Training is usually required for these systems to function in everyday life [
6,
7,
8]. Against the background of demographic development with decreasing human resources, the support of training in new technologies by coaching robots could be helpful especially for younger seniors (the baby boomer generation).
With the development of a robo-coach, we have taken a step towards training by a social robot. The robo-coach and its three functions were tested in a study in Austria with 34 participants. Although a large part of the population is familiar with digital tools such as smartphones, tablets and the Internet, the majority of them have never had the opportunity to interact with a robot. This fact can have a direct impact on the perception of this technology and lead to acceptance problems. Therefore, in this study, we investigated participants’ expectations and perceptions before and after a coaching session with a robot. To determine whether the training worked, comprehension questions and tasks were asked afterwards.
The robot had a face, tactile abilities and could speak. Coaching by the robot was possible via three functions (i) Project Introduction, (ii) System Introduction and (iii) Fill-in Questionnaire. The AgeWell project and the Embodied Conversational Agent developed there served as the first application example. The following contributions to the literature are hereby made.
Although the participants were familiar with common digital tools, they showed scepticism about using the robot before interacting with it, which was particularly evident in the ATI scale and its sub-items. Evaluation of their expectations, prior to any interaction with the robot, showed that they overestimated the complexity of the robot and its functions and underestimated their ability to operate the robot without assistance. This finding demonstrates the importance of using real robots when conducting studies [
17,
47]. More specifically, our study is one of the few in the literature to report findings on older adults’ perceptions of a robot as a result of using a real robot. This result was homogeneous between tech-savvy and non-tech-savvy participants. Non-tech-savvy participants were less curious about testing new systems. This aspect could affect the future adoption of this technology and hinder its implementation in real-world environments. This finding underscores the need to provide coaching with real robots to older adults, even those familiar with the technology, to help them overcome some unrealistic assumptions that may be preventing them from fully using the technology. Interestingly, participants’ expectations changed noticeably after they used the robot. Contrary to their expectations, participants found that the robot was easy to use and that they did not need help to operate it. The majority showed a neutral to very positive attitude toward the robot’s functions, as measured by the AttrakDiff questionnaire. They also perceived the three functions and the interaction with the robot as very smooth. Although these results confirm evidence from related studies (e.g., [
48]), they should be interpreted with caution. Participants’ pre-use expectations could not be influenced by design factors as they were measured before interacting with the system. Post-use perceptions, on the other hand, are strongly influenced by several factors such as the robot itself, the UX/UI design, and the participants’ white-collar nature. Thus, generalizing these interpretations of the results remains subject to further research. However, they suggest that policymakers may focus on familiarizing older adults with less common digital tools as a way to overcome negative expectations they may develop towards these technologies.
The questions that were used to check whether the participants had understood the content of the training could largely be answered. Part of the tasks concerning the ‘System Introduction’ could also be solved well. The participants had difficulties with one task in particular. Since the ‘System Introduction’ function was rated worse by the participants than the others, we conclude that the usability problem of the ECA already became apparent during the use of the robot. The users were then unable to distinguish between the robot and the ECA and therefore rated the function worse.
One limitation of this study that may have affected the results is the small number of participants. In addition, although the study used a real robot, it was conducted in a laboratory setting. In future work, the study could be extended by using the robot in real households over a longer period of time. In this way, the actual usefulness of a robo-coach as well as its perception by users in a real environment could be evaluated. In addition, other use cases for coaching should be tested, including assistance with everyday tasks.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}