
Intelligent Evacuation Route Planning Algorithm Based on Maximum Flow



Abstract
:1. Introduction
2. Related Works
2.1. Macromodel of the Evacuation Path Problem
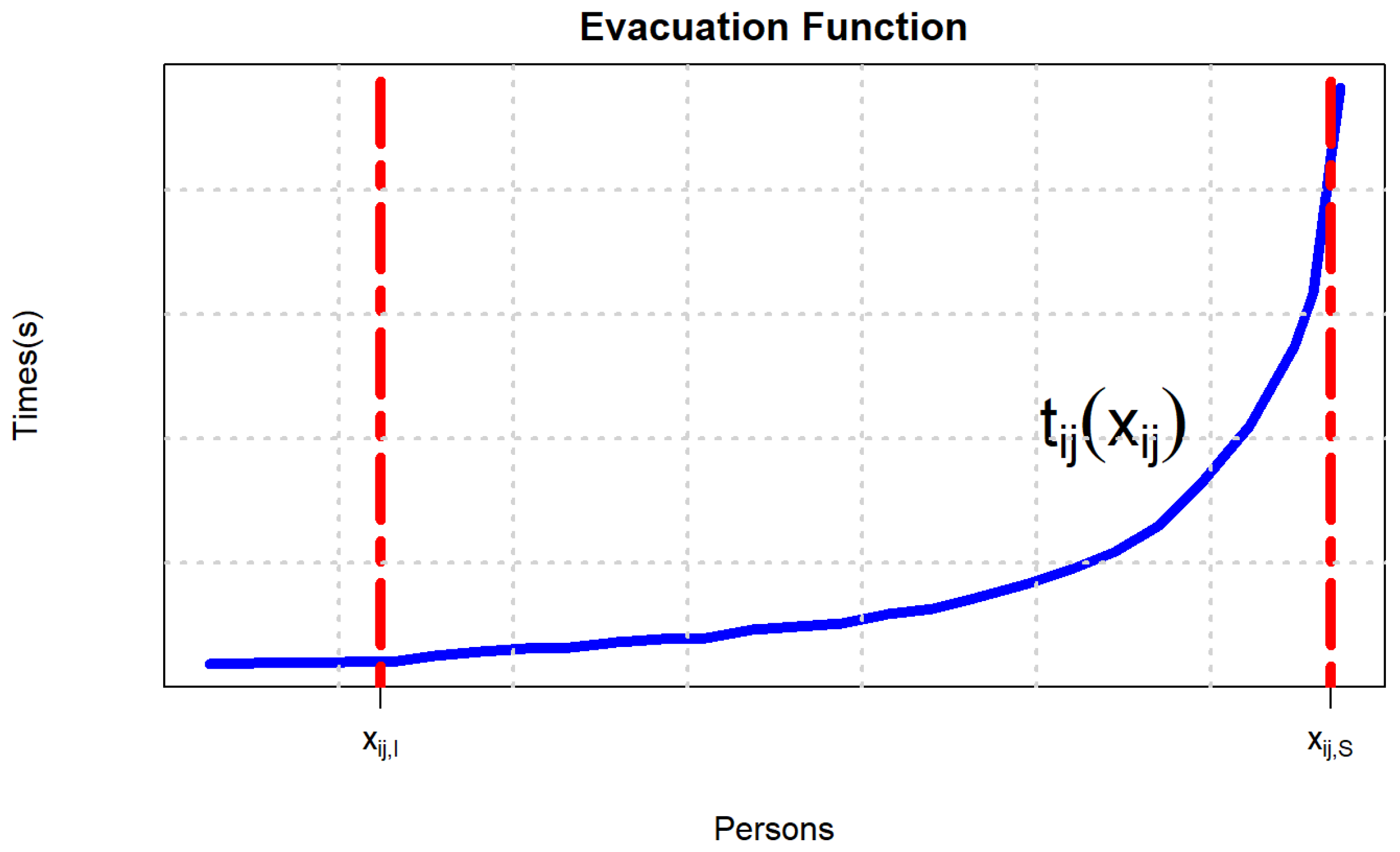
2.2. Nonlinear Evacuation Planning
3. Materials and Methods
3.1. Community Evacuation Problem
3.2. Approximation Algorithm Based on Network Flow
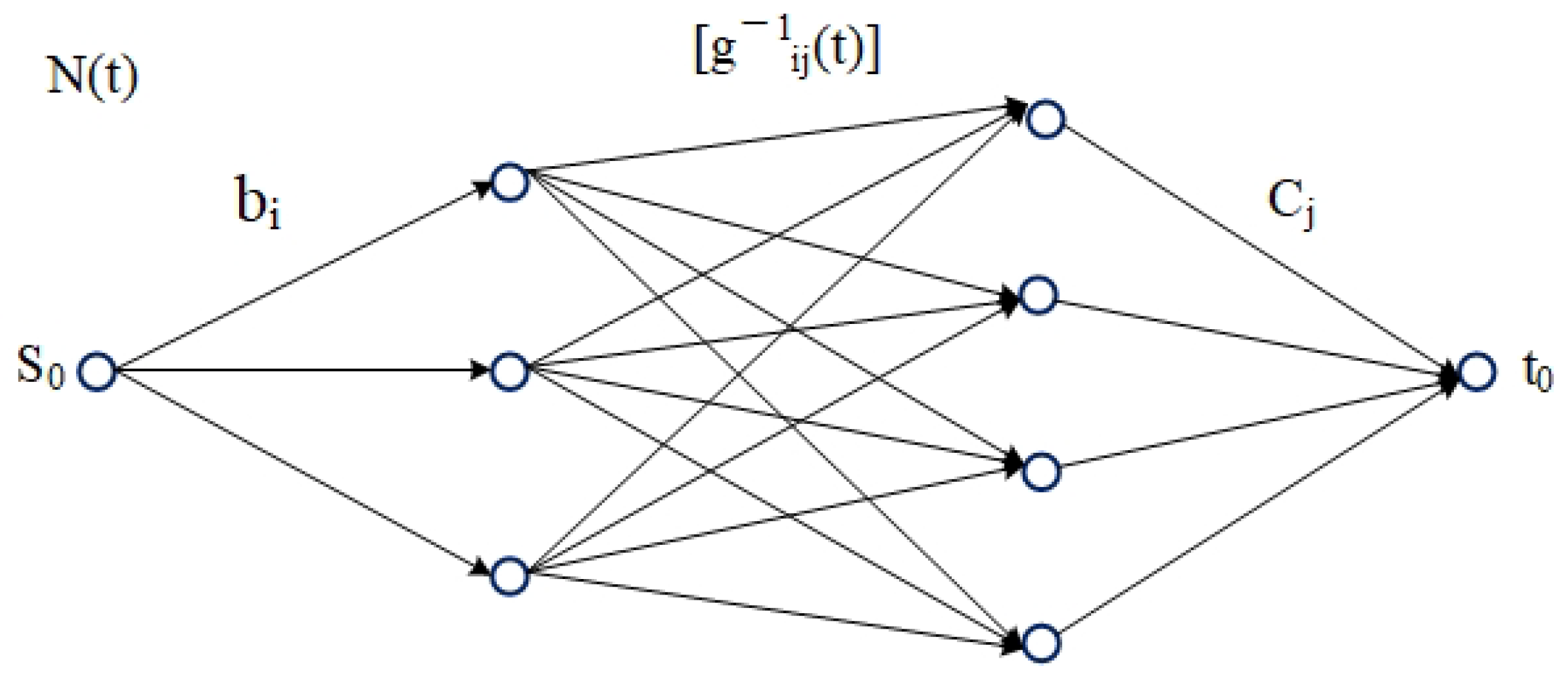
3.2.1. Network Flow Graph Structure Construction
- When the corresponding capacity is .
- When , the corresponding capacity is .
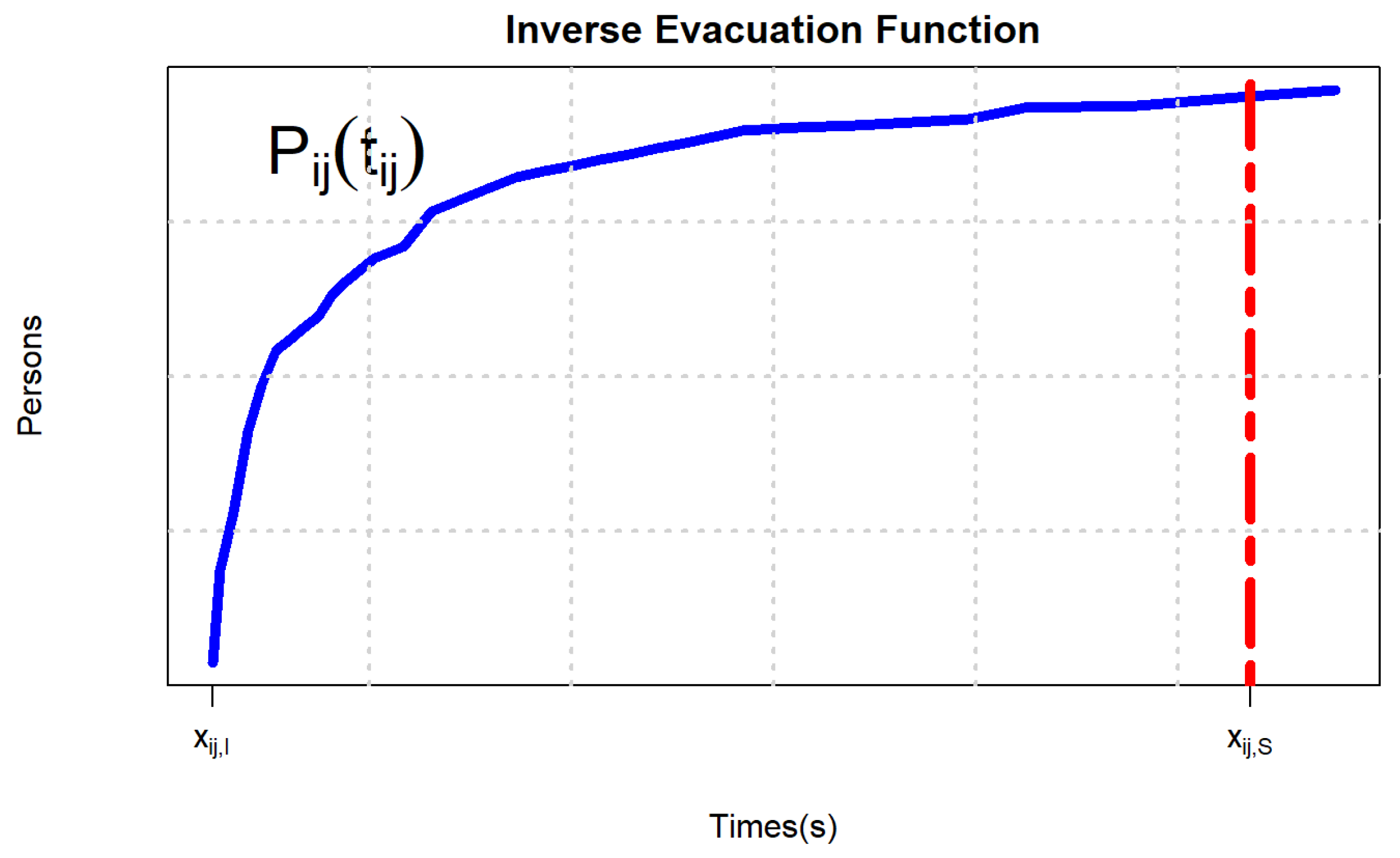
- In the arc between I and J, the set of arcs whose time required for a single person i to j transfer to the network is less than the parameter t is incorporated into the network. That is, if and only if , then the capacity limit on this arc is , where represents the inverse function of and ⌊⌋ represents the same but rounded down. Since the function is a one-to-one mapping, its inverse function must exist.
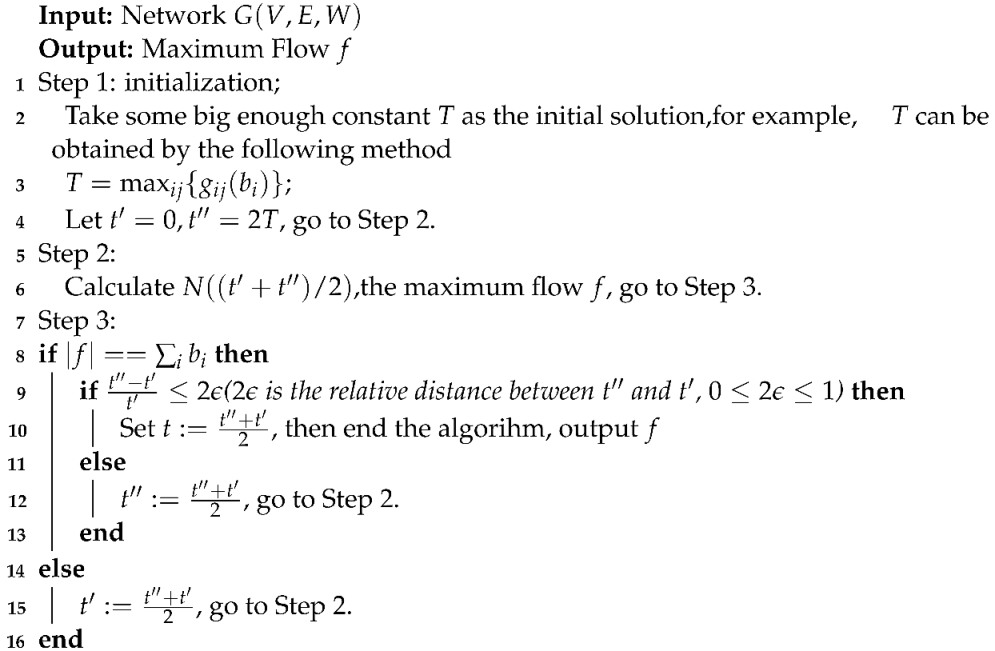
3.2.2. Binary Search Algorithm Based on Network Flow
| Algorithm 1: Binary search algorithm based on network flow |
 |
3.2.3. Theoretical Comparison
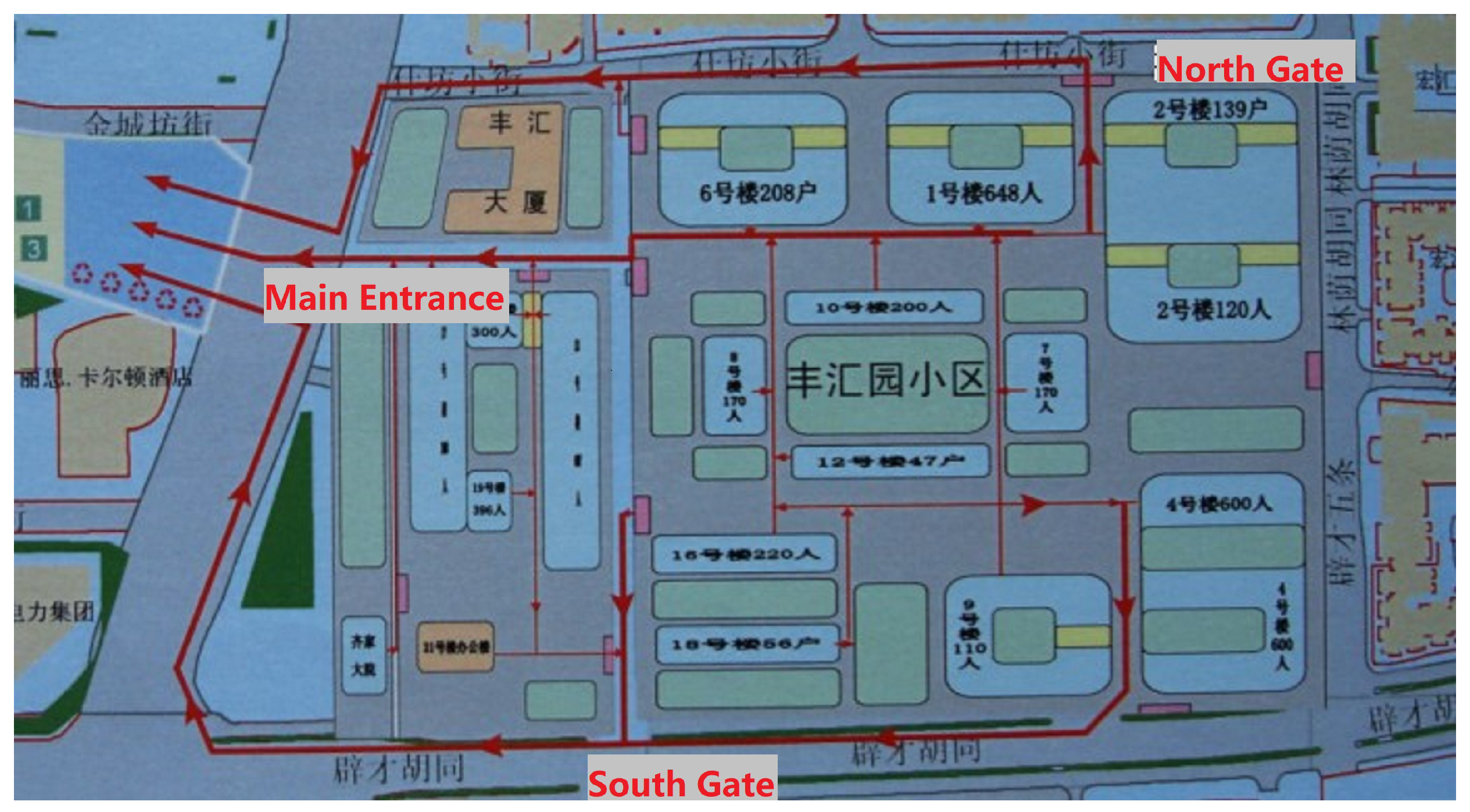
4. Empirical Study of the Evacuation Route Planning Problem
Experiment Description
5. Computational Results of the Empirical Study
Analysis of Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lekkas, A.M.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Aldair, A.A.; Rashid, M.T.; Rashid, A.T. Navigation of Mobile Robot with Polygon Obstacles Avoidance Based on Quadratic Bezier Curves. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 43, 757–771. [Google Scholar] [CrossRef]
- Tharwat, A.; Elhoseny, M.; Hassanien, A.E.; Gabel, T.; Sangaiah, A.K. Intelligent Bézier curve-based path planning model using Chaotic Particle Swarm Optimization algorithm. Clust. Comput. 2019, 22, 4745–4766. [Google Scholar] [CrossRef]
- Beknazarov, Z.; Rustamov, D. A review of existing pension services in developed and developing countries. E3S Web Conf. 2021, 258, 05040. [Google Scholar] [CrossRef]
- Neshat, M.; Pourahmad, A.A.; Rohani, Z. Improving the cooperation of fuzzy simplified memory A* search and particle swarm optimisation for path planning. Int. J. Swarm Intell. 2020, 5, 1–21. [Google Scholar] [CrossRef]
- Duchoň, F.; Babinec, A.; Kajan, M.; Beňo, P.; Florek, M.; Fico, T.; Jurišica, L. Path Planning with Modified a Star Algorithm for a Mobile Robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Sheng, J.; He, G.; Guo, W.; Li, J. An Improved Artificial Potential Field Algorithm for Virtual Human Path Planning. In Entertainment for Education. Digital Techniques and Systems. Edutainment 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 592–601. [Google Scholar]
- Hoppe, B.; Tardos, E. Polynomial Time Algorithms for Some Evacuation Problems. In Proceedings of the Fifth Annual ACM-SIAM Symposium on Discrete Algorithms, Society for Industrial and Applied Mathematics (SODA ’94), Arlington, VA, USA, 23–25 January 1994; pp. 433–441. [Google Scholar]
- Hamacher, H.; Tjandra, S. Mathematical Modelling of Evacuation Problems: A State of Art; Technical Report 24; Fraunhofer (ITWM): Kaiserslautern, Germany, 2001. [Google Scholar]
- Kaur, M.; Singh, D. Fusion of medical images using deep belief networks. Clust. Comput. 2020, 23, 1439–1453. [Google Scholar] [CrossRef]
- Ali, R.; Siddiqi, M.H.; Idris, M.; Ali, T.; Hussain, S.; Huh, E.N.; Kang, B.H.; Lee, S. GUDM: Automatic Generation of Unified Datasets for Learning and Reasoning in Healthcare. Sensors 2015, 15, 15772–15798. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Hu, Q.; Liu, J. Path Planning of Mobile Robot Based on Improved Multiobjective Genetic Algorithm. Wirel. Commun. Mob. Comput. 2021, 2021, 8836615. [Google Scholar] [CrossRef]
- Guo, N.; Li, C.; Wang, D.; Song, Y.; Liu, G.; Gao, T. Local Path Planning of Mobile Robot Based on Long Short-Term Memory Neural Network. Autom. Control Comput. Sci. 2021, 55, 53–65. [Google Scholar] [CrossRef]
- Li, F.F.; Du, Y.; Jia, K.J. Path planning and smoothing of mobile robot based on improved artificial fish swarm algorithm. Sci. Rep. 2022, 12, 659. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Zhang, H.; Li, Z.; Huang, Y.; Yin, Z. A Novel Self-Adaptation Hybrid Artificial Fish-Swarm Algorithm. IFAC Proc. Vol. 2013, 46, 583–588. [Google Scholar] [CrossRef]
- Babaee Tirkolaee, E.; Goli, A.; Weber, G.W. Fuzzy Mathematical Programming and Self-Adaptive Artificial Fish Swarm Algorithm for Just-in-Time Energy-Aware Flow Shop Scheduling Problem with Outsourcing Option. IEEE Trans. Fuzzy Syst. 2020, 28, 2772–2783. [Google Scholar] [CrossRef]
- Li, W.; Wang, G.G.; Gandomi, A.H. A Survey of Learning-Based Intelligent Optimization Algorithms. Arch. Comput. Methods Eng. 2021, 28, 3781–3799. [Google Scholar] [CrossRef]
- Burkard, R.E.; Dlaska, K.; Klinz, B. The quickest flow problem. Z. Oper. Res. 1993, 37, 31–58. [Google Scholar] [CrossRef]
- Hoppe, B.; Tardos, E. The Quickest Transshipment Problem. Math. Oper. Res. 2000, 25, 36–62. [Google Scholar] [CrossRef] [Green Version]
- Zeisberger, M.; Nowik, D.; Beck, L.; Märtin, S.; Beckmann, U.; Meyer, T. Quality management in medical rehabilitative care by the German statutory pension insurance scheme. Eur. J. Phys. Rehabil. Med. 2019, 55, 845–851. [Google Scholar] [CrossRef]
- Dunn, C.E.; Newton, D. Optimal Routes in GIS and Emergency Planning Applications. Area 1992, 24, 259–267. [Google Scholar]
- Yamada, T. A network flow approach to a city emergency evacuation planning. Int. J. Syst. Sci. 1996, 27, 931–936. [Google Scholar] [CrossRef]
- Cova, T.J.; Johnson, J.P. A network flow model for lane-based evacuation routing. Transp. Res. Part A Policy Pract. 2003, 37, 579–604. [Google Scholar] [CrossRef]
- Pursals, S.C.; Garzón, F.G. Optimal building evacuation time considering evacuation routes. Eur. J. Oper. Res. 2009, 192, 692–699. [Google Scholar] [CrossRef]
- Zhu, Z.; Quiel, S.E. Near-Field Radiant Heat Flux from Open-Air Gasoline and Diesel Pool Fires: Modified Point Source and Discretized Solid Flame Models. Fire Technol. 2021, 57, 1901–1926. [Google Scholar] [CrossRef]
- Carey, M.; Subrahmanian, E. An approach to modelling time-varying flows on congested networks. Transp. Res. Part B Methodol. 2000, 34, 157–183. [Google Scholar] [CrossRef]
- CHEN, G.; SHUAI, B. Traffic Evacuation of Cellular Network after Dangerous Goods Spill. J. Transp. Syst. Eng. Inf. Technol. 2012, 12, 143–148. [Google Scholar] [CrossRef]
- Atyabi, A.; Powers, D. Review of classical and heuristic-based navigation and path planning approaches. Int. J. Adv. Comput. Technol. (IJACT) 2013, 5. Available online: https://www.researchgate.net/profile/Adham-Atyabi/publication/257919874_Review_of_classical_and_heuristic-based_navigation_and_path_planning_approaches/links/00b7d52614e352a139000000/Review-of-classical-and-heuristic-based-navigation-and-path-planning-approaches.pdf (accessed on 15 May 2022).
- Wang, Q.; Wang, Y. Route Planning Based on Combination of Artificial Immune Algorithm and Ant Colony Algorithm. In Foundations of Intelligent Systems; Wang, Y., Li, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 121–130. [Google Scholar]
- Schrijver, A. On the history of the transportation and maximum flow problems. Math. Program. 2002, 91, 437–445. [Google Scholar] [CrossRef]
- Soni, R.; Varma, S. Solving Maximum Flow and Minimum Cut Network Problems by Labeling Method. Int. J. Comput. Sci. Technol. (IJCST) 2015, 6, 103–104. [Google Scholar]
- Gilimyanov, R.F. Recursive method of smoothing curvature of path in path planning problems for wheeled robots. Autom. Remote. Control 2011, 72, 1548–1556. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exit | Building No. | Total Number of People |
|---|---|---|
| The north gate | 1, 2, 6 | 749 |
| Main entrance | 7, 8, 12, 13, 15, 17 | 1855 |
| The south gate | 4, 9, 10, 16, 18, 19, 21 | 1525 |
| No. | Location | Available Area (m2) | Capacity (2 m2/Person) |
|---|---|---|---|
| 1 | The green belt on WSK Road | 10,000 | 5000 |
| 2 | Shiyan Middle School | 1000 | 500 |
| 3 | Lu Xun Secondary School | 1000 | 500 |
| 4 | Fendou Primary School | 1000 | 500 |
| 5 | No. 159 Middle School | 2000 | 1000 |
| 6 | Jiexin Park, Financial Street | 10,000 | 5000 |
| 7 | Chenghuang Temple | 1000 | 500 |
| Path | Length: (km) | Width: (m) | Available Area: (m2) |
|---|---|---|---|
| i = 1, j = 1 | 1.4 | 4 | 450 |
| i = 1, j = 2 | 1.35 | 4 | 450 |
| i = 1, j = 3 | 1.6 | 4 | 450 |
| i = 1, j = 4 | 1.1 | 4 | 450 |
| i = 1, j = 5 | 0.85 | 4 | 450 |
| i = 1, j = 6 | 1.1 | 4 | 450 |
| i = 1, j = 7 | 2 | 4 | 450 |
| i = 2, j = 1 | 1.9 | 5 | 750 |
| i = 2, j = 2 | 2 | 5 | 750 |
| i = 2, j = 3 | 2.1 | 5 | 750 |
| i = 2, j = 4 | 1.9 | 5 | 750 |
| i = 2, j = 5 | 2.3 | 5 | 750 |
| i = 2, j = 6 | 1.5 | 5 | 750 |
| i = 2, j = 7 | 1.4 | 5 | 750 |
| i = 3, j = 1 | 1.5 | 4 | 600 |
| i = 3, j = 2 | 1.4 | 4 | 600 |
| i = 3, j = 3 | 1.1 | 4 | 600 |
| i = 3, j = 4 | 1.5 | 4 | 600 |
| i = 3, j = 5 | 1.5 | 4 | 600 |
| i = 3, j = 6 | 1.2 | 4 | 600 |
| i = 3, j = 7 | 1.6 | 4 | 600 |
| No. | Path: | Toll: | Speed: (m/s) | Time: (s) |
|---|---|---|---|---|
| 1 | (2, 5) | 749 | 0.8144 | 7574.0769 |
| 2 | (3, 5) | 829 | 0.8013 | 12,734.4399 |
| 3 | (4, 5) | 998 | 1.1766 | 6565.7510 |
| 4 | (4, 6) | 500 | 0.7213 | 12,810.9734 |
| 5 | (4, 7) | 27 | 1.1995 | 11,871.4152 |
| 6 | (3, 8) | 500 | 0.7523 | 10,290.5930 |
| 7 | (3, 10) | 526 | 1.1620 | 12,723.9683 |
| Total Evacuation Time | min |
|---|---|
| Upper and lower bounds of last iteration | [1495.18, 1495.79] |
| The number of iterations | |
| Results in the accuracy |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Jin, H.; Liu, Y.; Zhang, X. Intelligent Evacuation Route Planning Algorithm Based on Maximum Flow. Int. J. Environ. Res. Public Health 2022, 19, 7865. https://doi.org/10.3390/ijerph19137865
Liu L, Jin H, Liu Y, Zhang X. Intelligent Evacuation Route Planning Algorithm Based on Maximum Flow. International Journal of Environmental Research and Public Health. 2022; 19(13):7865. https://doi.org/10.3390/ijerph19137865
Chicago/Turabian StyleLiu, Li, Huan Jin, Yangguang Liu, and Xiaomin Zhang. 2022. "Intelligent Evacuation Route Planning Algorithm Based on Maximum Flow" International Journal of Environmental Research and Public Health 19, no. 13: 7865. https://doi.org/10.3390/ijerph19137865
APA StyleLiu, L., Jin, H., Liu, Y., & Zhang, X. (2022). Intelligent Evacuation Route Planning Algorithm Based on Maximum Flow. International Journal of Environmental Research and Public Health, 19(13), 7865. https://doi.org/10.3390/ijerph19137865