
Modeling the Evolution of Major Storm-Disaster-Induced Accidents in the Offshore Oil and Gas Industry


Abstract
1. Introduction
- GT is developed to objectively identify accident causal factors from original data, which can reduce personnel subjective influences imposed by their knowledge and skill level.
- The use of DEMATEL-ISM can compensate for the shortcomings of insufficient information and high computing costs. In addition, the way to establish the direct influence matrix is improved according to the interaction matrix obtained from the objective analysis in the previous step.
- A hybrid algorithm that can calculate multiple shortest paths of the accident evolution under the same node pair is proposed. Combined with the causal factors and interaction relationships obtained by GT and DETAMEL-ISM, CN can quantitatively describe the evolution process of accidents.
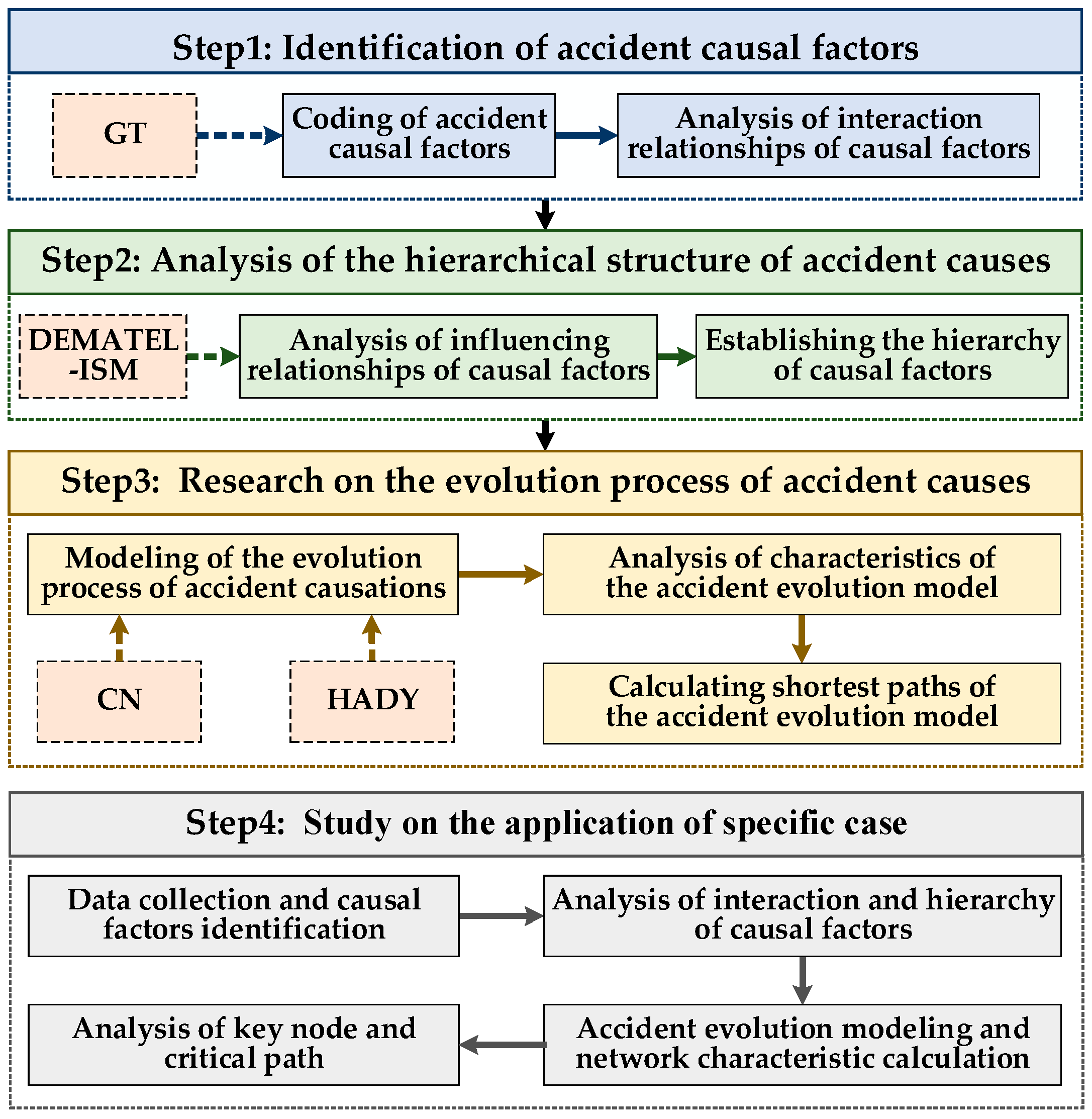
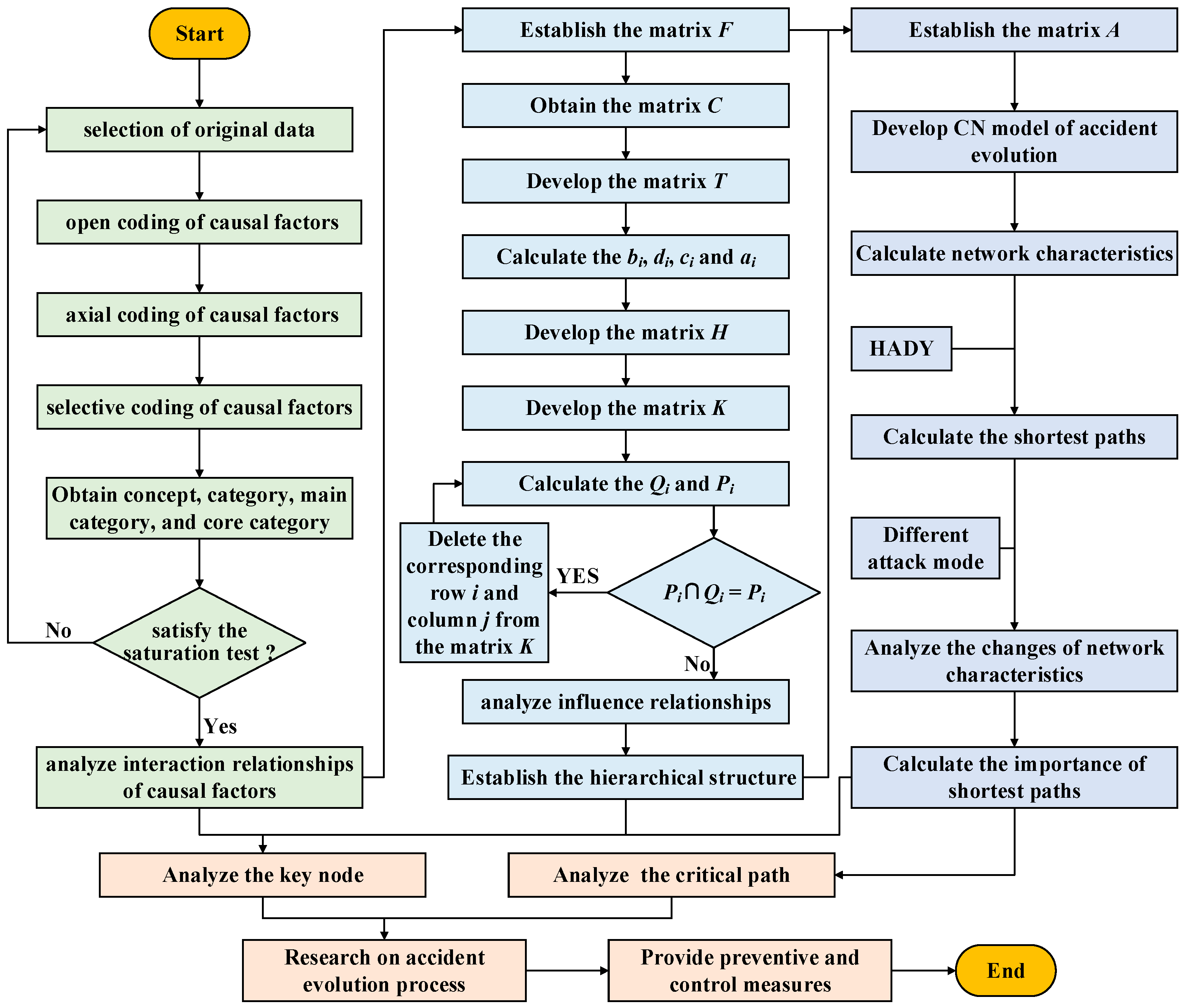
2. Methodology
- Identification of accident causal factors.
- Analysis of the hierarchical structure of accident causes.
- Research on the evolution process of accident causes.
- Study of the application in a specific case
2.1. Identification of Accident Causal Factors
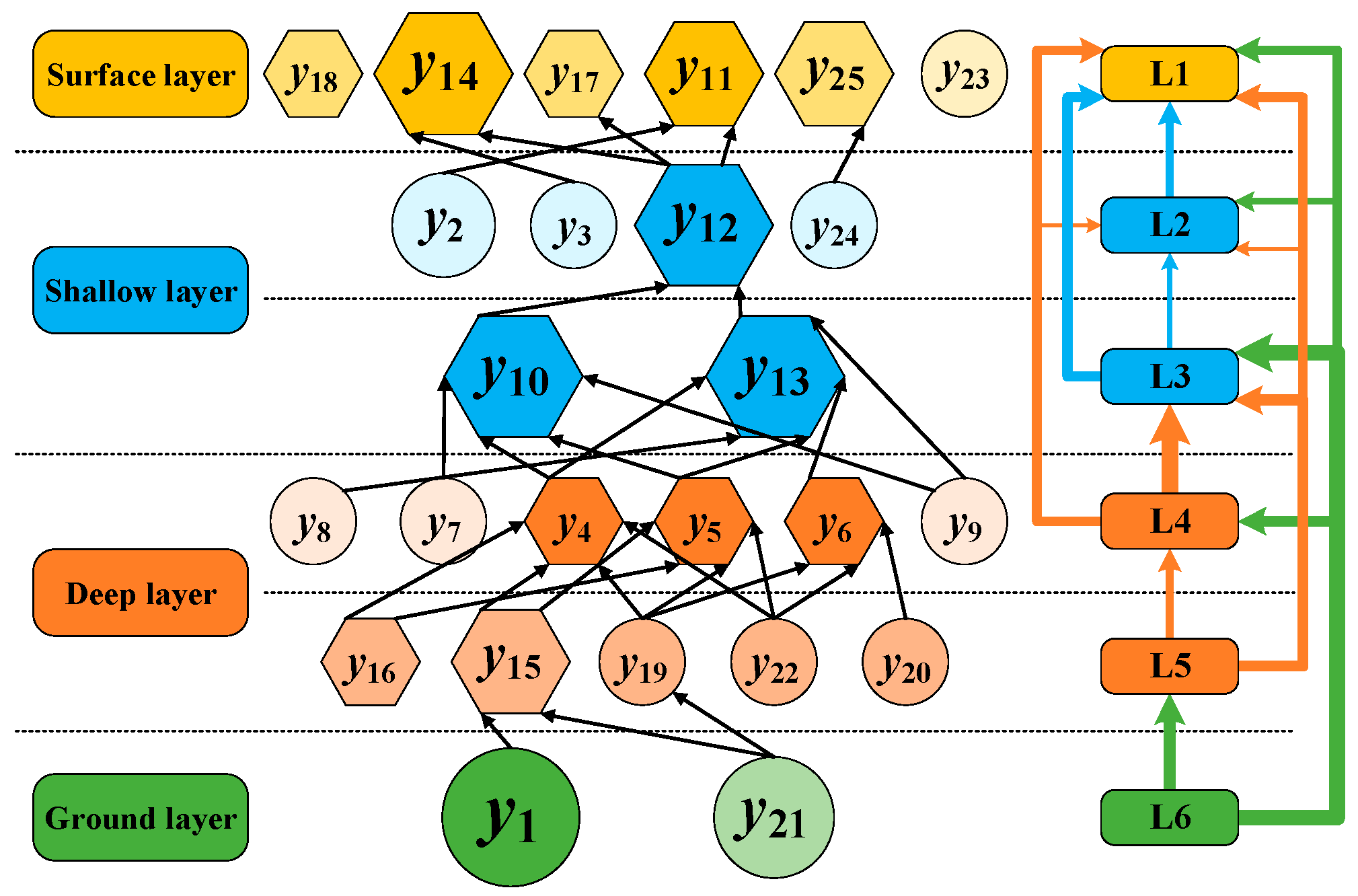
2.2. Analysis of the Hierarchical Structure of Accident Causes
- When constructing the index system of causal factors, the categories obtained from GT are absorbed, and are put into the set Y (yi&yj ∈ Y, i = 1, 2, …, n; j = 1, 2, …, n) of causal factors, to reduce the influence of subjectivity and avoid the inconsistency of the index scope.
- When establishing the matrix F, the matrix R is referred based on expert scoring, to obtain more objective analysis results.
- In the evolutionary hierarchy of accidents obtained from ISM analysis, the category frequency and the strength of influence relationships among factors obtained from GT and DEMATEL are presented simultaneously.
- Establish the matrix F = [fij]n×n, where fij represents the direct influence of factor yi on factor yj (yi&yj ∈ Y, i = 1, 2,…, n; j = 1, 2,…, n. Y is a set of system factors.). {0, 1, 2, 3} respectively represent {no influence, weak influence, medium influence, strong influence} in the matrix F.
- Normalize the matrix F and obtain the matrix C = [cij]n×n, where cij ∈ [0, 1]:
- 3.
- Develop the matrix T = [tij]n×n which is established to couple the direct and indirect influence relationships among factors:
- 4.
- Calculate the bi, di, ci and ai of each factor:
- 5.
- Develop the matrix H = [hij]n×n mainly for the purpose of considering the influence of factors on itself:
- 6.
- Develop the matrix K = [kij]n×n, which is established to simplify the weak influence relationship between factors and highlight the hierarchy of the system by selecting an appropriate threshold:
- 7.
- Calculate the Qi and Pi:
- 8.
- Establish the condition for hierarchical partitioning:
2.3. Research on the Evolution Process of Accident Causes
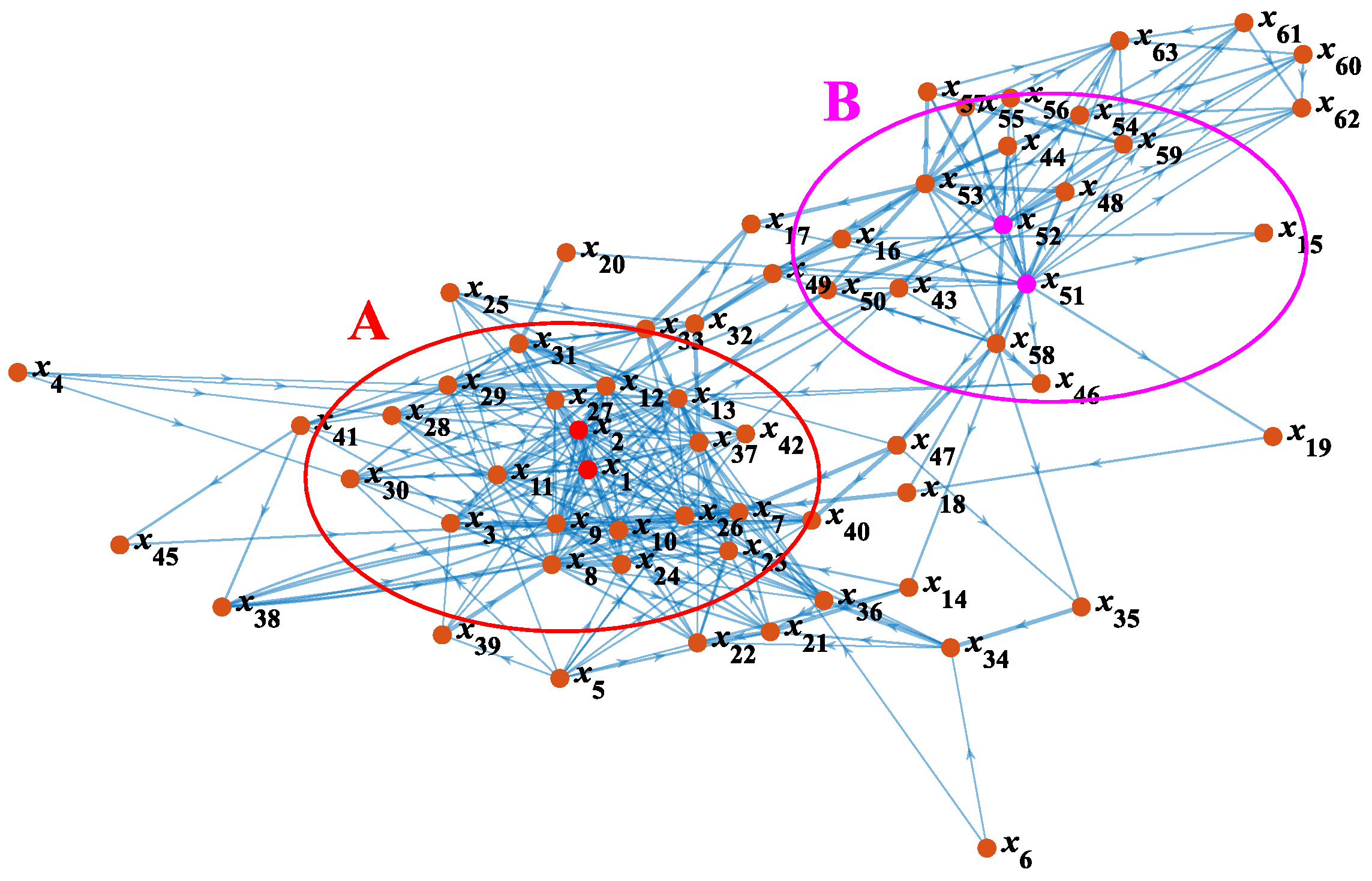
2.3.1. Modeling of CN
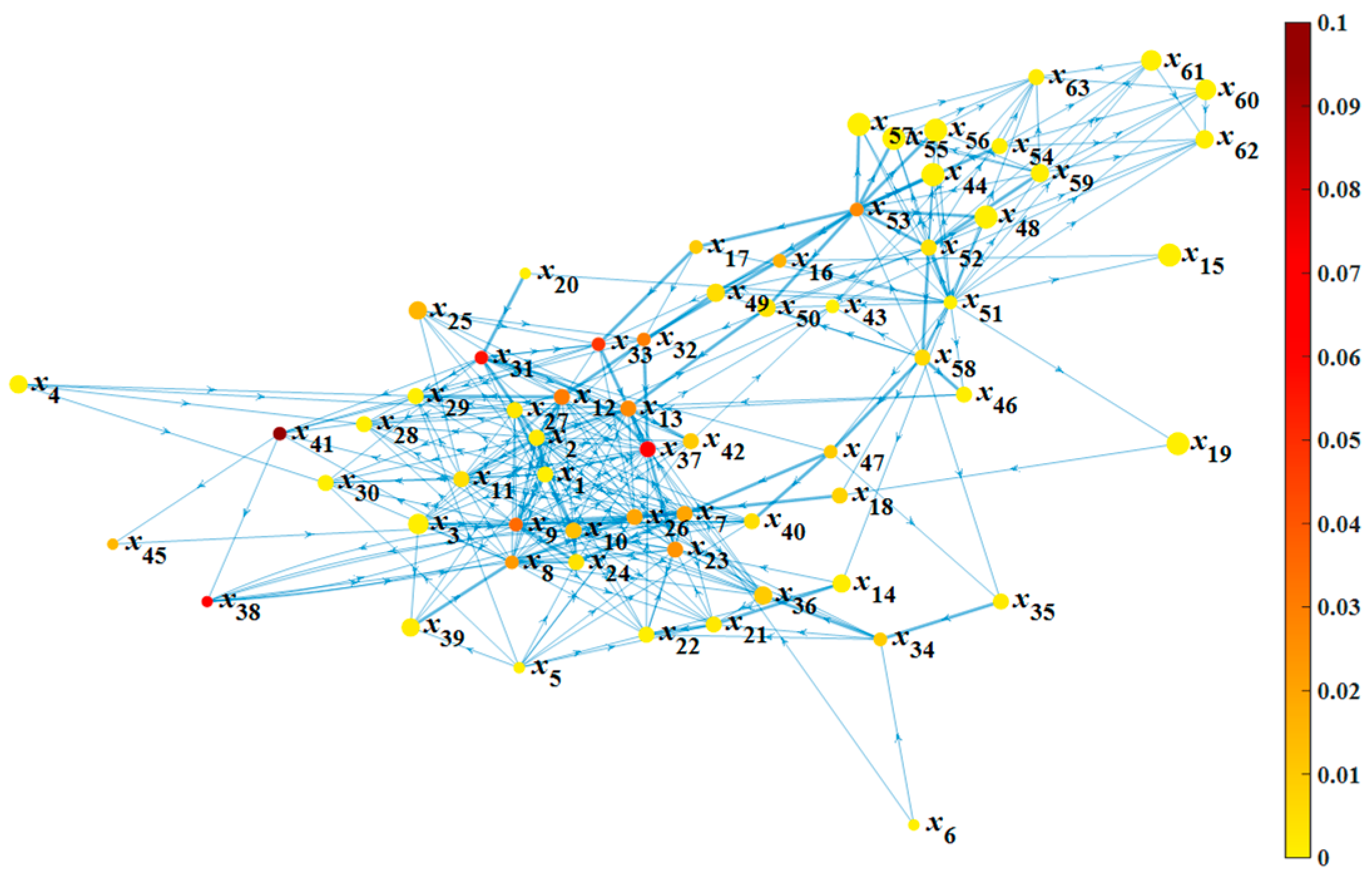
2.3.2. Characterization of CN
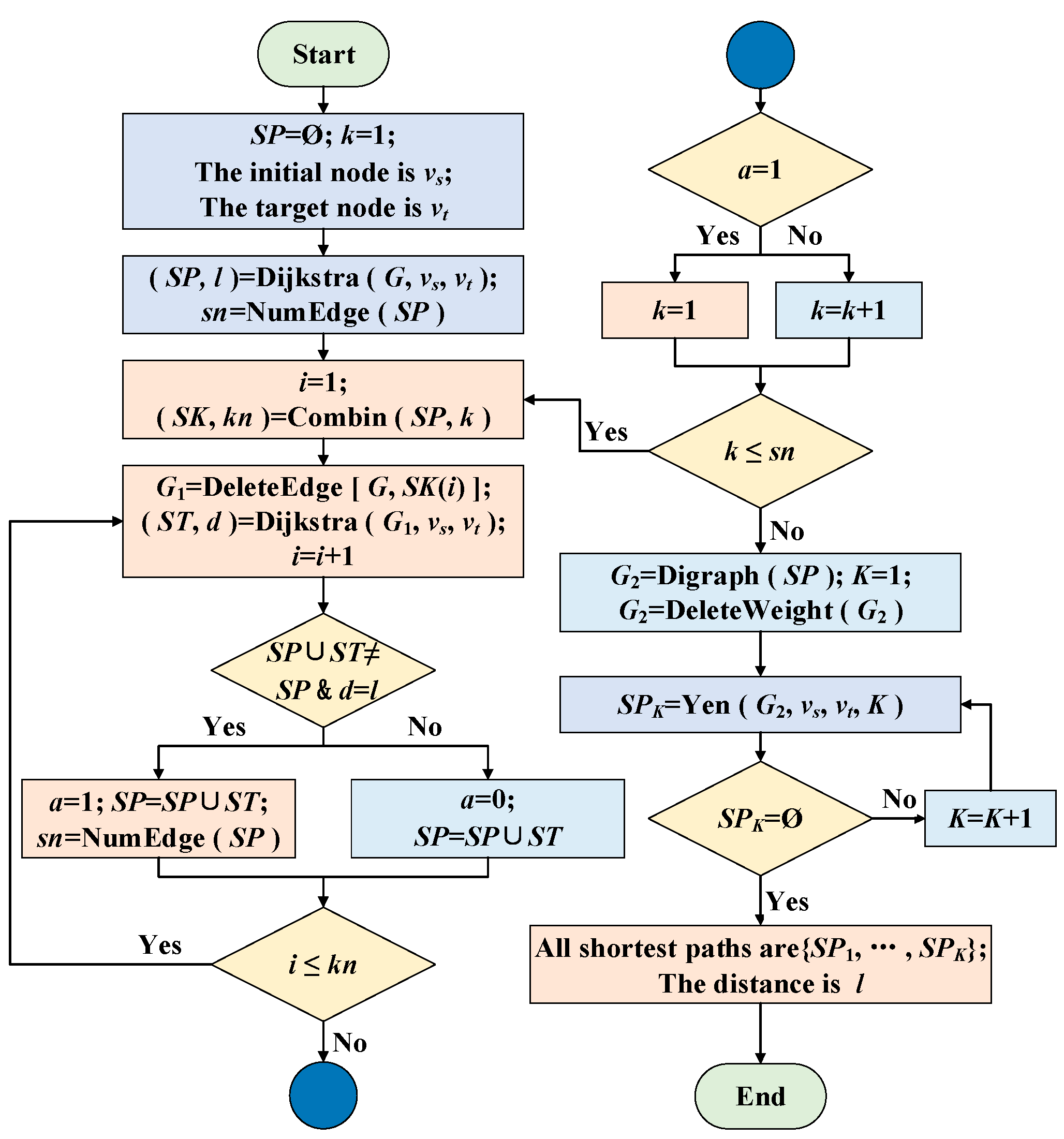
2.3.3. Shortest Paths of CN
- Set the edge set of shortest paths SP = Ø (the initial SP is the empty set). The initial node is vs, and the target node is vt. The initial k is 1.
- The Dijkstra algorithm is used to obtain a shortest path from vs to vt in the original network G. All edges of the shortest path are put into the set SP. The number of edges is denoted as sn, and the length of the path is denoted as l.
- List all combinations of k edges taken from the set SP and put them into the set SK. There are kn combinations in total, and the initial i is 1.
- Take the i-th combination from SK and delete the set of corresponding edges SK(i) in the original network G. The Dijkstra algorithm is used to find the shortest path from vs to vt in the modified network G1, and all edges of the shortest path are put into the set ST. The length of the path is denoted as d, and i = i + 1.
- Determine whether a new edge of the shortest path is added. If d = l and SP ∪ ST ≠ SP, a new edge has been added. Then, the logical value a = 1, SP = SP ∪ ST, and the number of edges is recalculated and denoted as sn. Otherwise, no new edge is added, the logical value a = 0, SP = SP, and the number of edges is denoted as sn.
- Determine whether all combinations have been taken out. If i ≤ kn, not all combinations are taken out, and step 4 will be taken. Otherwise, if all combinations have been taken out, step 7 will be taken.
- Determine whether this combination should be carried out again. If a = 1, this combination should be carried out again, then k = 1. Otherwise, there is no need to carry out this combination again, then k = k + 1.
- Determine whether all combinations have been listed. If k ≤ sn, not all combinations have been listed, then step 3 will be taken. Otherwise, all combinations have been listed, then step 9 will be taken.
- The set of all edges of shortest paths SP is used to form the shortest path network graph G2. All edge weights in G2 are set to 1 (i.e., unweighted network), and K = 1.
- K shortest paths from vs to vt in the unweighted shortest path network graph G2 are obtained by the Yen algorithm and put into the set SPK.
- Determine whether the combined algorithm has been completed. If SPK = Ø, step 12 will be taken; otherwise, K = K + 1 and step 10 will been taken.
- The sets SP1 to SPK are all the shortest paths from vs to vt in the original network G, and the length of the shortest path is l.
3. Case Study
3.1. Identifying Causal Factors of Offshore Storm Accidents
3.1.1. Coding of Accident Causal Factors
3.1.2. Analyzing Interaction Relationships among Causal Factors
3.2. Developing the Hierarchy of Causes of Offshore Storm Accidents
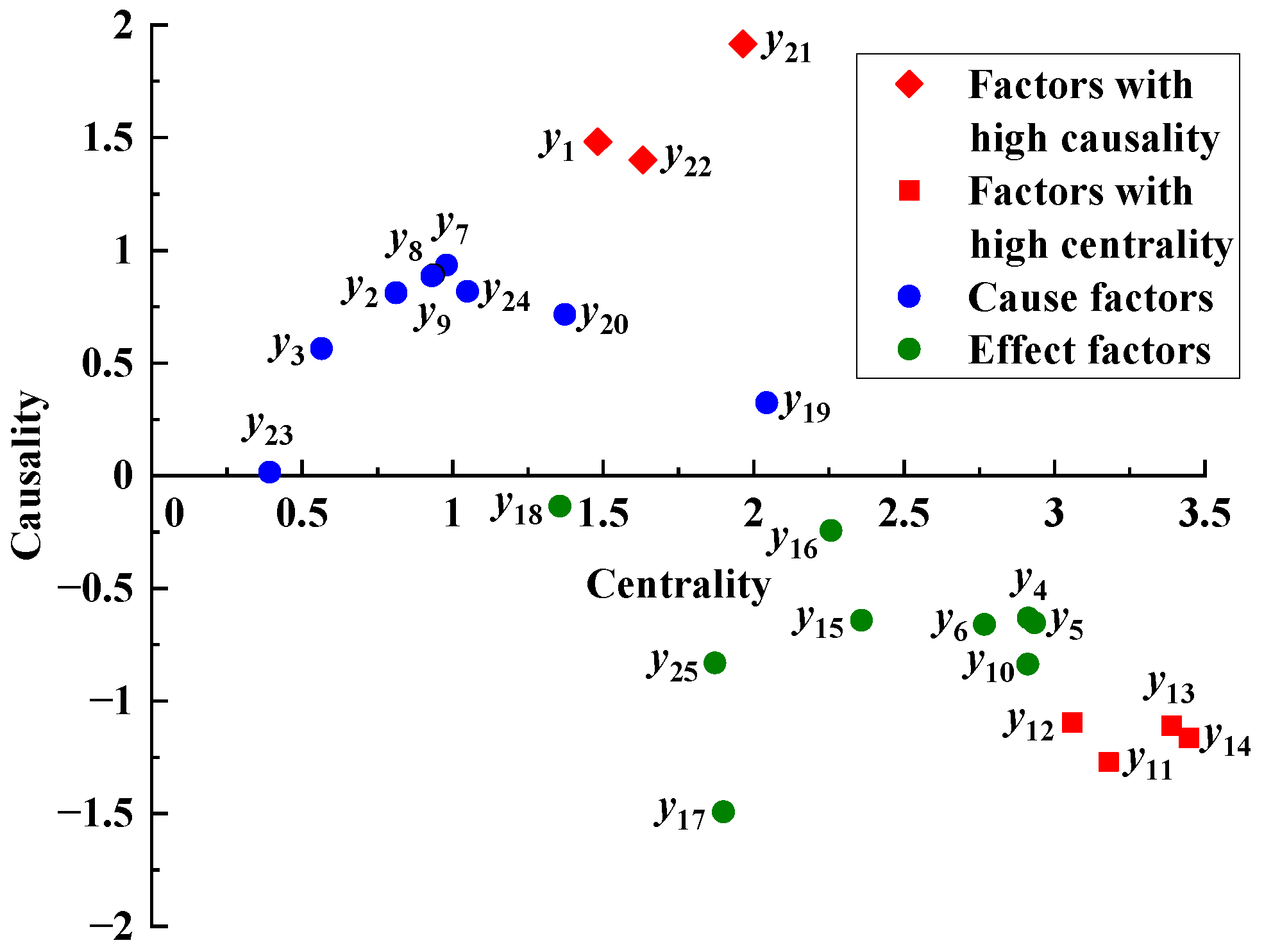
3.2.1. Analyzing Influence Relationships among Causal Factors
3.2.2. Establishing the Hierarchical Structure of Causal Factors
3.3. Analyzing the Evolution Process of Offshore Storm Accidents
3.3.1. Modeling the Evolution Process of Accident Causes
3.3.2. Analyzing the Evolution Characteristic of Accident Causes
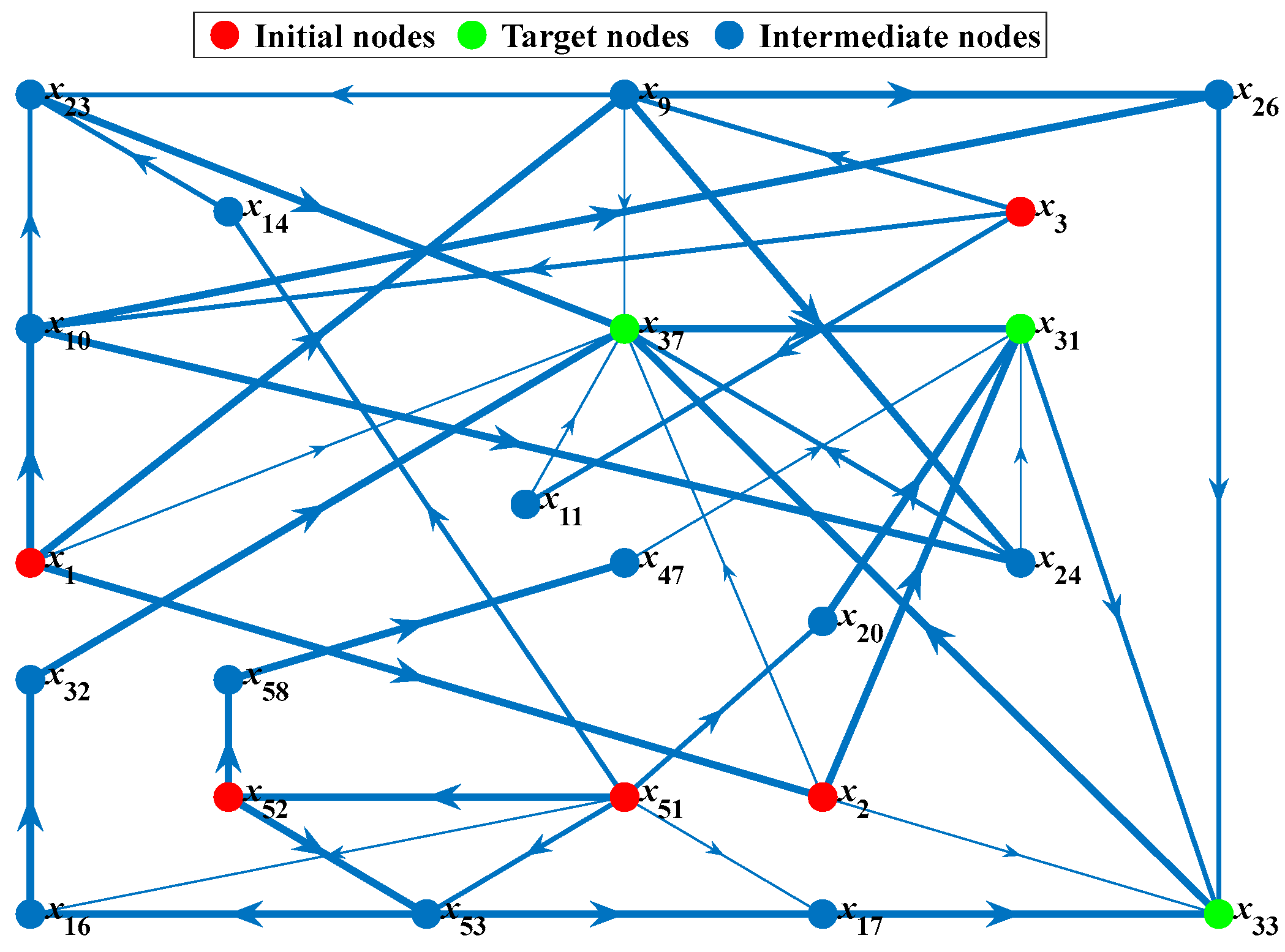
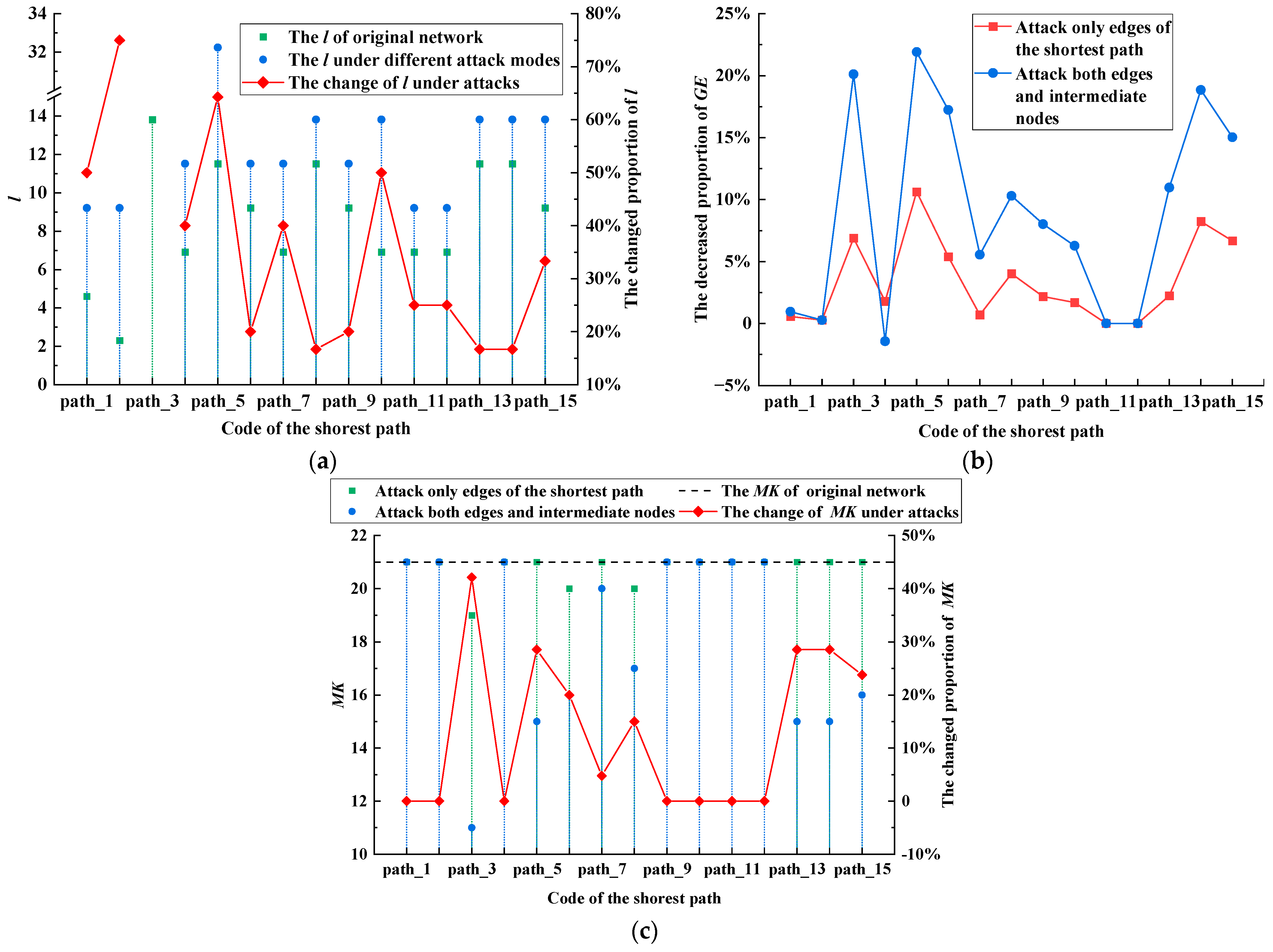
3.3.3. Calculating Shortest Evolution Paths of Accident Causations
- Attack only the edges of the shortest path;
- Attack both the edges and intermediate nodes of the shortest path.
3.4. Results of the Case Study
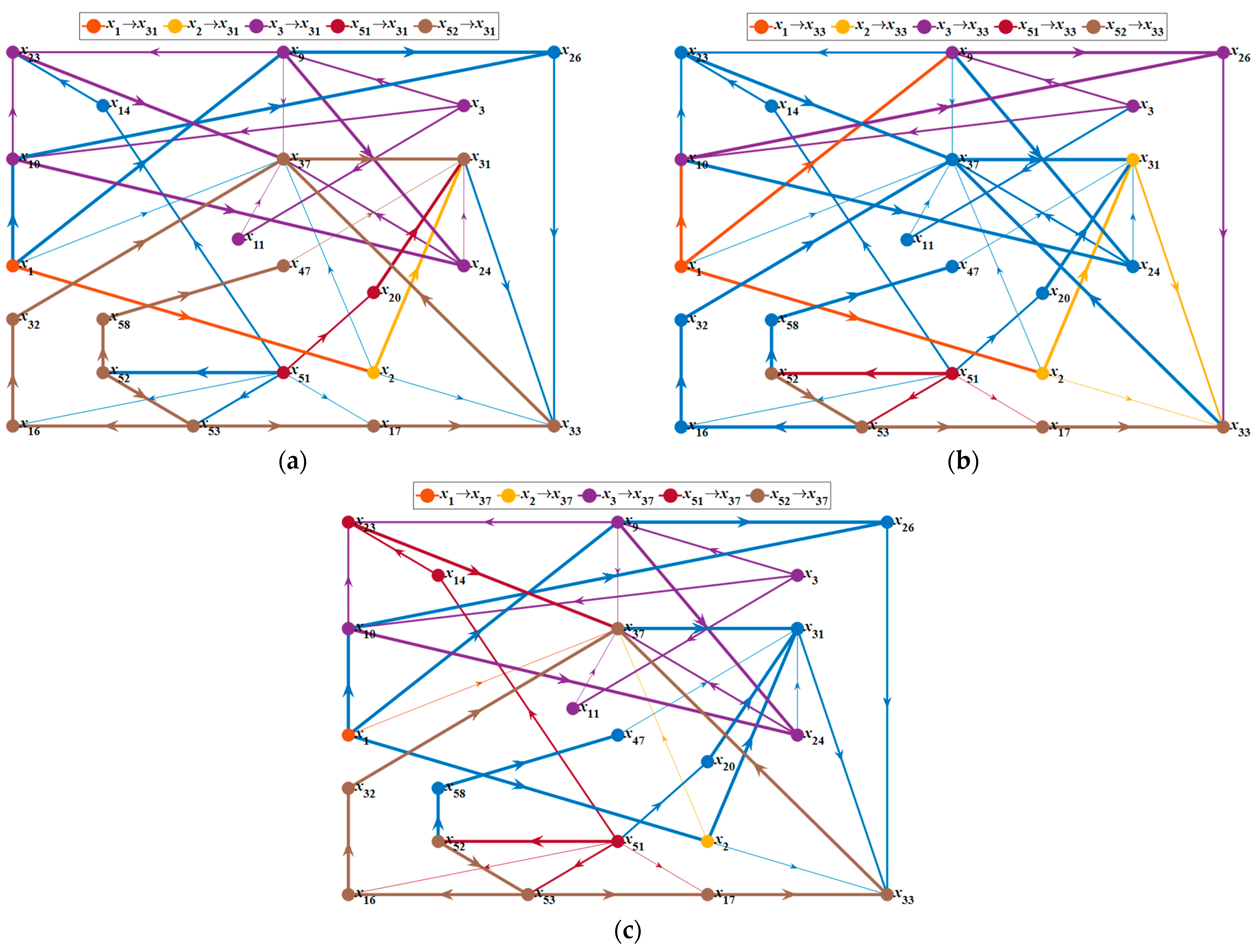
- The path_3 (x3, x31), which is the shortest path group hardest to prevent, i.e., the one with the most paths. There are eight shortest paths, and each path contains the initial node x3 (rapid ocean current) and the target node x31 (flooding of decks). The intermediate nodes are x9 (collision of vessels), x10 (collision of debris), x11 (collision of cantilever deck), x23 (fracture of legs), x24 (collision of vessels) and x37 (list of the platform).
- The path_2 (x2, x31), which is the shortest path group most likely to occur, i.e., the one with the minimum shortest path length. The path length is 2.30 and the initial node x2 (huge ocean wave) of this path is directly connected to the target node x31 (flooding of decks) without passing through any intermediate nodes.
- The path_5 (x52, x31) and path_14 (x51, x37), which are the shortest path groups hardest to block, i.e., the one with the most edges. There are four shortest paths with five edges: the path_5B, the path_5C, the path_14F and the path_14G.
- The path_3E, x3 (rapid ocean current) → x9 (collision of vessels) → x23 (fracture of legs) → x37 (list of the platform) → x31 (flooding of decks).
- The path_5C, x52 (inadequate risk response) → x53 (inadequate preventive measures) → x17 (lack of watertight subdivision isolation) → x33 (flooding of cabins) → x37 (list of the platform) → x31 (flooding of decks).
- The path_14G, x51 (inadequate risk perception) → x52 (inadequate risk response) → x53 (inadequate preventive measures) → x17 (lack of watertight subdivision isolation) → x33 (flooding of cabins) → x37 (list of the platform).
- The path_6C, x1 (strong ocean storm) → x9 (collision of vessels) → x26 (fracture of hulls) → x33 (flooding of cabins).
- The path_15B, x52 (inadequate risk response) → x53 (inadequate preventive measures) → x17 (lack of watertight subdivision isolation) → x33 (flooding of cabins) → x37 (list of the platform).
- Preventive measures before accidents: accurate storm forecast and early warning; redundant design of structure and equipment; regular detection of structural defects; fixing movable items on the deck; ensuring the strength of towing ropes; ensuring water-tightness; enhancing risk awareness and strengthening safety training; complete operation regulations and emergency plans; adequate emergency equipment.
- Control measures in accidents: closing sea valves on the platform; timely drainage of cabin and deck; adjusting ballast conditions of the platform; avoiding excessive oscillation and list of the platform; avoiding hot work; disconnecting from the wellhead; ensuring the normal operation of the power system; ensuring the normal operation of the dynamic positioning system; timely strengthening the support structure; stay out of the storm zone by towing or self-propulsion.
- Emergency measures after getting out of control: activating the alarm system; emergency muster at the designated location; evacuating platform personnel in sequence; calling for outside help; shutting down unessential electrical equipment; distributing personal survival equipment; lowering lifeboats, life rafts and emergency escape ladders; rescue assist of guard ships.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
Annotations
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Region | Platform Type | Consequence | No. | Region | Platform Type | Consequence |
|---|---|---|---|---|---|---|---|
| 1 | GOM | Jack up | Sinking | 40 | WP | Vessel | Sinking |
| 2 | UKCS | Semi-sub | Sinking | 41 | GOM | Vessel | Major damage |
| 3 | GOM | Jack up | Sinking | 42 | GOM | Jack up | Major damage |
| 4 | GOM | Jack up | Sinking | 43 | GOM | Spar | Major damage |
| 5 | UKCS | Jack up | Sinking | 44 | GOM | Jacket | Collapse |
| 6 | UKCS | Semi-sub | Capsizing | 45 | GOM | Semi-sub | Major damage |
| 7 | GOM | Jack up | Sinking | 46 | WP | Jacket | Collapse |
| 8 | NCS | Jack up | Sinking | 47 | GOM | Semi-sub | Major damage |
| 9 | NCS | Semi-sub | Capsizing | 48 | GOM | Tension leg | Major damage |
| 10 | GOM | Jack up | Capsizing | 49 | GOM | Jack up | Major damage |
| 11 | WP | Jack up | Sinking | 50 | GOM | Jack up | Major damage |
| 12 | NCS | Jack up | Sinking | 51 | GOM | Jack up | Sinking |
| 13 | WP | Jack up | Major damage | 52 | GOM | Semi-sub | Major damage |
| 14 | GOM | Jack up | Sinking | 53 | GOM | Jacket | Collapse |
| 15 | NCS | Semi-sub | Capsizing | 54 | GOM | Jack up | Major damage |
| 16 | GOM | Jack up | Sinking | 55 | GOM | Tension leg | Major damage |
| 17 | NCS | Jack up | Sinking | 56 | GOM | Jack up | Collapse |
| 18 | NCS | Jack up | Sinking | 57 | GOM | Jack up | Collapse |
| 19 | NCS | Jack up | Sinking | 58 | GOM | Jacket | Major damage |
| 20 | GOM | Semi-sub | Capsizing | 59 | GOM | Jack up | Sinking |
| 21 | NCS | Jack up | Capsizing | 60 | GOM | Jack up | Sinking |
| 22 | GOM | Jack up | Major damage | 61 | GOM | Jack up | Major damage |
| 23 | WP | Vessel | Capsizing | 62 | GOM | Jack up | Sinking |
| 24 | NCS | Jack up | Sinking | 63 | GOM | Jacket | Collapse |
| 25 | GOM | Jack up | Capsizing | 64 | GOM | Jacket | Major damage |
| 26 | GOM | Jack up | Sinking | 65 | GOM | Semi-sub | Major damage |
| 27 | WP | Vessel | Capsizing | 66 | GOM | Vessel | Major damage |
| 28 | UKCS | Jack up | Sinking | 67 | WP | Vessel | Major damage |
| 29 | UKCS | Jack up | Capsizing | 68 | WP | Vessel | Major damage |
| 30 | WP | Vessel | Capsizing | 69 | GOM | Semi-sub | Major damage |
| 31 | GOM | Jack up | Major damage | 70 | GOM | Vessel | Capsizing |
| 32 | NCS | Jack up | Sinking | 71 | GOM | Jack up | Major damage |
| 33 | NCS | Jack up | Sinking | 72 | GOM | Jacket | Collapse |
| 34 | GOM | Jack up | Sinking | 73 | GOM | Jacket | Collapse |
| 35 | GOM | Jack up | Capsizing | 74 | WP | Semi-sub | Major damage |
| 36 | GOM | Jack up | Capsizing | 75 | WP | Jack up | Major damage |
| 37 | GOM | Jack up | Capsizing | 76 | WP | Jack up | Capsizing |
| 38 | GOM | Jacket | Major damage | 77 | WP | Jacket | Major damage |
| 39 | GOM | Jacket | Collapse | 78 | WP | Semi-sub | Capsizing |
Appendix B

References
- Misuri, A.; Casson Moreno, V.; Quddus, N.; Cozzani, V. Lessons learnt from the impact of hurricane Harvey on the chemical and process industry. Reliab. Eng. Syst. Safe 2019, 190, 106521. [Google Scholar] [CrossRef]
- Cruz, A.M.; Krausmann, E. Vulnerability of the oil and gas sector to climate change and extreme weather events. Clim. Chang. 2013, 121, 41–53. [Google Scholar] [CrossRef]
- Mikellidou, C.V.; Shakou, L.M.; Boustras, G.; Dimopoulos, C. Energy critical infrastructures at risk from climate change: A state of the art review. Saf. Sci. 2018, 110, 110–120. [Google Scholar] [CrossRef]
- Tay, W.H.; Lau, K.K.; Lai, L.S.; Shariff, A.M.; Wang, T. Current development and challenges in the intensified absorption technology for natural gas purification at offshore condition. J. Nat. Gas Sci. Eng. 2019, 71, 102977. [Google Scholar] [CrossRef]
- Necci, A.; Tarantola, S.; Vamanu, B.; Krausmann, E.; Ponte, L. Lessons learned from offshore oil and gas incidents in the Arctic and other ice-prone seas. Ocean Eng. 2019, 185, 12–26. [Google Scholar] [CrossRef]
- Sargsyan, G.; Venta, E.; Slaydon, J.; Colon, R.; Latiolais, P. Analysis of Risk Management Practices of the Oil and Gas Industry in Southeast Texas During Hurricane Harvey. J. Appl. Bus. Econ. 2020, 22, 104–118. [Google Scholar] [CrossRef]
- Ismail, Z.; Kong, K.K.; Othman, S.Z.; Law, K.H.; Khoo, S.Y.; Ong, Z.C.; Shirazi, S.M. Evaluating accidents in the offshore drilling of petroleum: Regional picture and reducing impact. Measurement 2014, 51, 18–33. [Google Scholar] [CrossRef]
- Liu, S.; Li, X.; Wang, D.; Zhang, D. Investigations on the mechanism of the microstructural evolution of different coal ranks under liquid nitrogen cold soaking. Energy Sources Part A Recovery Util. Environ. Effects 2020, 1–17. [Google Scholar] [CrossRef]
- Qiu, L.; Liu, Z.; Wang, E.; He, X.; Feng, J.; Li, B. Early-warning of rock burst in coal mine by low-frequency electromagnetic radiation. Eng. Geol. 2020, 279, 105755. [Google Scholar] [CrossRef]
- Ma, Y.; Nie, B.; He, X.; Li, X.; Meng, J.; Song, D. Mechanism investigation on coal and gas outburst: An overview. Int. J. Miner. Metall. Mater. 2020, 27, 872–887. [Google Scholar] [CrossRef]
- Crivellari, A.; Bonvicini, S.; Tugnoli, A.; Cozzani, V. Multi-target Inherent Safety Indices for the Early Design of Offshore Oil&Gas Facilities. Process Saf. Environ. 2021, 148, 256–272. [Google Scholar] [CrossRef]
- Chakraborty, A.; Ibrahim, A.; Cruz, A.M. A study of accident investigation methodologies applied to the Natech events during the 2011 Great East Japan earthquake. J. Loss Prev. Proc. 2018, 51, 208–222. [Google Scholar] [CrossRef]
- Garg, T.; Gokavarapu, S. Lessons learnt from root cause analysis of Gulf of Mexico oil spill 2010. In Proceedings of the SPE Kuwait International Petroleum Conference and Exhibition, Kuwait City, Kuwait, 10–12 December 2012. [Google Scholar] [CrossRef]
- Piemontese, M.; Tassone, G.; Sita, F.J.; Bertoldi, L.; Taleballah, E.Y.; Zhao, G.; Crawford, N. Expediting deepwater subsea development with a Batch drilling and completion strategy: Lessons learned Offshore Angola. In Proceedings of the Annual Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2018. [Google Scholar] [CrossRef]
- Naghavi-Konjin, Z.; Mortazavi, S.; Asilian-Mahabadi, H.; Hajizadeh, E. Ranking the occupational incident contributory factors: A Bayesian network model for the petroleum industry. Process Saf. Environ. 2020, 137, 352–357. [Google Scholar] [CrossRef]
- Rahman, M.S.; Khan, F.; Shaikh, A.; Ahmed, S.; Imtiaz, S. Development of risk model for marine logistics support to offshore oil and gas operations in remote and harsh environments. Ocean Eng. 2019, 174, 125–134. [Google Scholar] [CrossRef]
- Badida, P.; Balasubramaniam, Y.; Jayaprakash, J. Risk evaluation of oil and natural gas pipelines due to natural hazards using fuzzy fault tree analysis. J. Nat. Gas Sci. Eng. 2019, 66, 284–292. [Google Scholar] [CrossRef]
- Ramzali, N.; Lavasani, M.R.M.; Ghodousi, J. Safety barriers analysis of offshore drilling system by employing Fuzzy Event Tree Analysis. Saf. Sci. 2015, 78, 49–59. [Google Scholar] [CrossRef]
- BahooToroody, A.; Abaiee, M.M.; Gholamnia, R.; Torody, M.B.; Nejad, N.H. Developing a Risk-Based Approach for Optimizing Human Reliability Assessment in an Offshore Operation. Open J. Saf. Sci. Technol. 2016, 6, 25–34. [Google Scholar] [CrossRef][Green Version]
- Bucelli, M.; Landucci, G.; Haugen, S.; Paltrinieri, N.; Cozzani, V. Assessment of safety barriers for the prevention of cascading events in oil and gas offshore installations operating in harsh environment. Ocean Eng. 2018, 158, 171–185. [Google Scholar] [CrossRef]
- Xue, L.; Fan, J.; Rausand, M.; Zhang, L. A safety barrier-based accident model for offshore drilling blowouts. J. Loss Prev. Proc. 2013, 26, 164–171. [Google Scholar] [CrossRef]
- Bubbico, R.; Lee, S.; Moscati, D.; Paltrinieri, N. Dynamic assessment of safety barriers preventing escalation in offshore Oil&Gas. Saf. Sci. 2020, 121, 319–330. [Google Scholar] [CrossRef]
- Tabibzadeh, M.; Meshkati, N. Applying the AcciMap methodology to investigate a major accident in offshore drilling: A systematic risk management framework for oil and gas industry. In Proceedings of the SPE Western Regional Meeting, Garden Grove, CA, USA, 27–30 April 2015. [Google Scholar] [CrossRef]
- Tabibzadeh, M.; Mokhtari, M. An Integrated System-Oriented Methodology for the Risk Analysis of Offshore Oil and Gas Drilling Industry: AcciMap and Bow-Tie United. In Proceedings of the SPE Western Regional Meeting, Garden Grove, CA, USA, 22–27 April 2018. [Google Scholar] [CrossRef]
- Tabibzadeh, M.; Jain, A. Systematic Root-Cause Analysis of Three Major Offshore Oil and Gas Drilling Accidents Using the AcciMap Methodology. In Proceedings of the SPE Western Regional Meeting, Garden Grove, CA, USA, 22–27 April 2018. [Google Scholar] [CrossRef]
- Wang, L.; Cao, Q.; Zhou, L. Research on the influencing factors in coal mine production safety based on the combination of DEMATEL and ISM. Saf. Sci. 2018, 103, 51–61. [Google Scholar] [CrossRef]
- Li, F.; Wang, W.; Dubljevic, S.; Khan, F.; Xu, J.; Yi, J. Analysis on accident-causing factors of urban buried gas pipeline network by combining DEMATEL, ISM and BN methods. J. Loss Prev. Proc. 2019, 61, 49–57. [Google Scholar] [CrossRef]
- Yang, M.; Khan, F.I.; Sadiq, R. Prioritization of environmental issues in offshore oil and gas operations: A hybrid approach using fuzzy inference system and fuzzy analytic hierarchy process. Process Saf. Environ. 2011, 89, 22–34. [Google Scholar] [CrossRef]
- Sun, Z.; Zhou, J.; Gan, L. Safety assessment in oil drilling work system based on empirical study and Analytic Network Process. Saf. Sci. 2018, 105, 86–97. [Google Scholar] [CrossRef]
- Daneshfar, M.A.; Ardjmand, M. Selecting a suitable model for collecting, transferring, and recycling drilling wastes produced in the operational areas of the Iranian offshore oil company (IOOC) using analytical hierarchy process (AHP). J. Environ. Manag. 2020, 259, 109791. [Google Scholar] [CrossRef]
- Kassem, M.A.; Khoiry, M.A.; Hamzah, N. Structural modelling of internal risk factors for oil and gas construction projects. Int. J. Energy Sect. Manag. 2020, 14, 975–1000. [Google Scholar] [CrossRef]
- Wang, Q.; Sun, X. Crude oil price: Demand, supply, economic activity, economic policy uncertainty and wars—From the perspective of structural equation modelling (SEM). Energy 2017, 133, 483–490. [Google Scholar] [CrossRef]
- Sætrevik, B.; Hystad, S.W. Situation awareness as a determinant for unsafe actions and subjective risk assessment on offshore attendant vessels. Saf. Sci. 2017, 93, 214–221. [Google Scholar] [CrossRef]
- Mentes, A.; Akyildiz, H.; Yetkin, M.; Turkoglu, N. A FSA based fuzzy DEMATEL approach for risk assessment of cargo ships at coasts and open seas of Turkey. Saf. Sci. 2015, 79, 1–10. [Google Scholar] [CrossRef]
- Meng, X.; Chen, G.; Zhu, G.; Zhu, Y. Dynamic quantitative risk assessment of accidents induced by leakage on offshore platforms using DEMATEL-BN. Int. J. Nav. Arch. Ocean 2019, 11, 22–32. [Google Scholar] [CrossRef]
- Wu, W.; Yang, C.; Chang, J.; Château, P.; Chang, Y. Risk assessment by integrating interpretive structural modeling and Bayesian network, case of offshore pipeline project. Reliab. Eng. Syst. Safe 2015, 142, 515–524. [Google Scholar] [CrossRef]
- Wang, W.; Liu, X.; Qin, Y.; Huang, J.; Liu, Y. Assessing contributory factors in potential systemic accidents using AcciMap and integrated fuzzy ISM—MICMAC approach. Int. J. Ind. Ergonom. 2018, 68, 311–326. [Google Scholar] [CrossRef]
- Khakzad, N.; Khan, F.; Amyotte, P. Quantitative risk analysis of offshore drilling operations: A Bayesian approach. Saf. Sci. 2013, 57, 108–117. [Google Scholar] [CrossRef]
- Cai, B.; Liu, Y.; Zhang, Y.; Fan, Q.; Liu, Z.; Tian, X. A dynamic Bayesian networks modeling of human factors on offshore blowouts. J. Loss Prev. Proc. 2013, 26, 639–649. [Google Scholar] [CrossRef]
- Mrozowska, A. Formal Risk Assessment of the risk of major accidents affecting natural environment and human life, occurring as a result of offshore drilling and production operations based on the provisions of Directive 2013/30/EU. Saf. Sci. 2021, 134, 105007. [Google Scholar] [CrossRef]
- Jiang, S.; Chen, G.; Zhu, Y.; Li, X.; Shen, X.; He, R. Real-time risk assessment of explosion on offshore platform using Bayesian network and CFD. J. Loss Prev. Proc. 2021, 72, 104518. [Google Scholar] [CrossRef]
- Yin, B.; Li, B.; Liu, G.; Wang, Z.; Sun, B. Quantitative risk analysis of offshore well blowout using bayesian network. Saf. Sci. 2021, 135, 105080. [Google Scholar] [CrossRef]
- Li, X.; Chen, G.; Zhu, H. Quantitative risk analysis on leakage failure of submarine oil and gas pipelines using Bayesian network. Process Saf. Environ. 2016, 103, 163–173. [Google Scholar] [CrossRef]
- Li, X.; Chen, G.; Khan, F.; Xu, C. Dynamic risk assessment of subsea pipelines leak using precursor data. Ocean Eng. 2019, 178, 156–169. [Google Scholar] [CrossRef]
- Chang, Y.; Chen, G.; Wu, X.; Ye, J.; Chen, B.; Xu, L. Failure probability analysis for emergency disconnect of deepwater drilling riser using Bayesian network. J. Loss Prev. Proc. 2018, 51, 42–53. [Google Scholar] [CrossRef]
- He, R.; Chen, G.; Shen, X.; Jiang, S.; Chen, G. Reliability assessment of repairable closed-loop process systems under uncertainties. ISA Trans. 2020, 104, 222–232. [Google Scholar] [CrossRef] [PubMed]
- He, R.; Li, X.; Chen, G.; Wang, Y.; Jiang, S.; Zhi, C. A quantitative risk analysis model considering uncertain information. Process Saf. Environ. 2018, 118, 361–370. [Google Scholar] [CrossRef]
- Zhu, J.; Chen, G.; Khan, F.; Yang, M.; Li, X.; Meng, X.; He, R. A sequence-based method for dynamic reliability assessment of MPD systems. Process Saf. Environ. 2021, 146, 927–942. [Google Scholar] [CrossRef]
- Meng, X.; Zhu, J.; Fu, J.; Li, T.; Chen, G. An accident causation network for quantitative risk assessment of deepwater drilling. Process Saf. Environ. 2021, 148, 1179–1190. [Google Scholar] [CrossRef]
- Glaser, B.G.; Strauss, A.L. The Discovery of Grounded Theory: Strategies for Qualitative Research, 1st ed.; Routledge: New York, NY, USA, 1999; pp. 1–20. [Google Scholar]
- Strauss, A.L.; Corbin, J.M. Basics of Qualitative Research: Techniques and Procedures for Developing Grounded Theory, 2nd ed.; Sage Publications Inc.: Thousand Oaks, CA, USA, 1998; pp. 1–8. [Google Scholar]
- Charmaz, K. Constructivist and objectivist grounded theory. In Handbook of Qualitative Research, 2nd ed.; Denzin, N.K., Lincoln, Y., Eds.; Sage Publications Inc.: Thousand Oaks, CA, USA, 2000; pp. 509–535. [Google Scholar]
- Mullai, A.; Paulsson, U. A grounded theory model for analysis of marine accidents. Accid. Anal. Prev. 2011, 43, 1590–1603. [Google Scholar] [CrossRef]
- Shojaei, P.; Haeri, S.A.S. Development of supply chain risk management approaches for construction projects: A grounded theory approach. Comput. Ind. Eng. 2019, 128, 837–850. [Google Scholar] [CrossRef]
- Si, S.; You, X.; Liu, H.; Zhang, P.; Marco, P.; Pizzarelli, M. DEMATEL Technique: A Systematic Review of the State-of-the-Art Literature on Methodologies and Applications. Math. Probl. Eng. 2018, 2018, 3696457. [Google Scholar] [CrossRef]
- Li, X.; Han, Z.; Zhang, R.; Zhang, Y.; Zhang, L. Risk assessment of hydrogen generation unit considering dependencies using integrated DEMATEL and TOPSIS approach. Int. J. Hydrogen Energy 2020, 45, 29630–29642. [Google Scholar] [CrossRef]
- Raut, R.D.; Narkhede, B.; Gardas, B.B. To identify the critical success factors of sustainable supply chain management practices in the context of oil and gas industries: ISM approach. Renew. Sustain. Energy Rev. 2017, 68, 33–47. [Google Scholar] [CrossRef]
- Bai, X.; Qin, W.; Luo, X. Study on risk evolution model based on complex networks for fire risk of offshore floating platforms. In Proceedings of the Twenty-Fifth International Ocean and Polar Engineering Conference, Kona, HI, USA, 21 June 2015; pp. 809–813. [Google Scholar]
- Li, K.; Wang, S.A. network accident causation model for monitoring railway safety. Saf. Sci. 2018, 109, 398–402. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, C.; Ding, L.; Sekula, P.; Love, P.E.D.; Zhou, C. Combining association rules mining with complex networks to monitor coupled risks. Reliab. Eng. Syst. Safe 2019, 186, 194–208. [Google Scholar] [CrossRef]
- Koç, Y.; Warnier, M.; Kooij, R.E.; Brazier, F.M.T. An entropy-based metric to quantify the robustness of power grids against cascading failures. Saf. Sci. 2013, 59, 126–134. [Google Scholar] [CrossRef]
- Wang, Z.; Hill, D.J.; Chen, G.; Dong, Z.Y. Power system cascading risk assessment based on complex network theory. Phys. A Stat. Mech. Appl. 2017, 482, 532–543. [Google Scholar] [CrossRef]
- Yang, W.; Yang, H.; Yang, D. Identification of homogeneous regions in terms of flood seasonality using a complex network approach. J. Hydrol. 2019, 576, 726–735. [Google Scholar] [CrossRef]
- Costa, L.D.F.; Rodrigues, F.A.; Travieso, G.; Villas Boas, P.R. Characterization of complex networks: A survey of measurements. Adv. Phys. 2007, 56, 167–242. [Google Scholar] [CrossRef]
- Boccaletti, S.; Latora, V.; Moreno, Y.; Chavez, M.; Hwang, D. Complex networks: Structure and dynamics. Phys. Rep. 2006, 424, 175–308. [Google Scholar] [CrossRef]
- Yanwei, Z.; Gengyu, W.; Fangzhi, G.; Chen, X.; Shedong, R.; Zhiwei, X. Optimal Coordination Path Selecting Method for Conduction Transformation Based on Floyd Algorithm. Procedia Comput. Sci. 2019, 162, 227–234. [Google Scholar] [CrossRef]
- Akram, M.; Habib, A.; Alcantud, J.C.R. An optimization study based on Dijkstra algorithm for a network with trapezoidal picture fuzzy numbers. Neural Comput. Appl. 2020, 33, 1329–1342. [Google Scholar] [CrossRef]
- Singh, A.P.; Singh, D.P. Implementation of K-shortest Path Algorithm in GPU Using CUDA. Procedia Comput. Sci. 2015, 48, 5–13. [Google Scholar] [CrossRef]
- Funnemark, E.; Young, E. Accident Statistics for Fixed Offshore Units on the UK Continental Shelf 1980–2001; Det Norske Veritas: Hovik, Norway, 2003. [Google Scholar]
- Spong, R.; Puskar, F. Assessment of Fixed Offshore Platform Performance in Hurricanes Andrew, Lili and Ivan; Energo Engineering, Inc.: Houston, TX, USA, 2005. [Google Scholar]
- Funnemark, E.; Young, E. Accident Statistics for Floating Offshore Units on the UK Continental Shelf 1980–2005; Det Norske Veritas: Hovik, Norway, 2007. [Google Scholar]
- Puskar, F.; Verret, S. Assessment of Fixed Offshore Platform Performance in Hurricanes Katrina and Rita; Energo Engineering, Inc.: Houston, TX, USA, 2007. [Google Scholar]
- Puskar, F.; Verret, S. Assessment of Damage and Failure Mechanisms for Offshore Structures and Pipelines in Hurricanes Gustav and Ike; Energo Engineering, Inc.: Houston, TX, USA, 2010. [Google Scholar]
- Offshore Incident Statistics. Available online: https://www.bsee.gov/stats-facts/offshore-incident-statistics (accessed on 4 June 2022).









| Core Category (Coding) | Main Category (Coding) | Category (Coding) | Concept (Coding) | Statistical Frequency |
|---|---|---|---|---|
| Factors of the external environment (h1) | Harsh natural environment (z1) | Inclement weather (y1) | Strong ocean storm (x1) | 61 |
| Huge ocean wave (x2) | 61 | |||
| Rapid ocean current (x3) | 61 | |||
| Adverse factors of sea water (y2) | Low temperature of sea water (x4) | 5 | ||
| Corrosion of sea water (x5) | 4 | |||
| Adverse conditions of the seabed (y3) | Loose soil of the seabed (x6) | 4 | ||
| Interference of the objective environment (z2) | Collision of fixed objects at sea (y4) | Collision of rocks (x7) | 1 | |
| Collision of buildings (x8) | 1 | |||
| Collision of floating objects at sea (y5) | Collision of vessels (x9) | 2 | ||
| Collision of debris (x10) | 2 | |||
| Collision of objects on the platform (y6) | Collision of cantilever deck (x11) | 1 | ||
| Collision of cargos (x12) | 2 | |||
| Collision of lifeboats (x13) | 1 | |||
| Factors of structure and equipment (h2) | Defect of structure design (z3) | Defect of structural connection (y7) | Poor quality of welded joints (x14) | 2 |
| Improper screws (x15) | 1 | |||
| Defect of watertight facility (y8) | Lack of weather seal (x16) | 1 | ||
| Lack of watertight subdivision isolation (x17) | 1 | |||
| Defect of dimension and material (y9) | Weak strength of hulls (x18) | 1 | ||
| Design defect of single hull tankers (x19) | 1 | |||
| Insufficient height of decks (x20) | 3 | |||
| Damage to platform structure (z4) | Damage of support structures (y10) | Fatigue propagation of weld cracks (x21) | 3 | |
| Fracture of lateral braces (x22) | 2 | |||
| Fracture of legs (x23) | 10 | |||
| Fracture of pontoons (x24) | 1 | |||
| Damage of watertight structures (y11) | Fracture of portholes (x25) | 4 | ||
| Fracture of hulls (x26) | 7 | |||
| Damage of platform facilities (y12) | Collapse of derricks (x27) | 7 | ||
| Damage of dormitories (x28) | 2 | |||
| Fracture of pipelines (x29) | 3 | |||
| Damage of helidecks (x30) | 2 | |||
| Unbalance state of the platform (z5) | Loss of watertightness (y13) | Flooding of decks (x31) | 21 | |
| Flooding of ballast control rooms (x32) | 2 | |||
| Flooding of cabins (x33) | 12 | |||
| Poor state of the platform (y14) | Excessive oscillation of legs (x34) | 2 | ||
| High center of gravity (x35) | 1 | |||
| Oscillation of the platform (x36) | 3 | |||
| List of the platform (x37) | 12 | |||
| Failure of platform equipment (z6) | Failure of the dynamic positioning system (y15) | Failure of thrusters (x38) | 1 | |
| Breaking of mooring lines (x39) | 2 | |||
| Breaking of towing lines (x40) | 5 | |||
| Failure of the power system (y16) | Failure of the power system (x41) | 3 | ||
| Failure of emergency equipment (y17) | Damage of lifeboats (x42) | 2 | ||
| Sinking of lifeboat (x43) | 2 | |||
| Poor performance of protective clothing (x44) | 1 | |||
| Failure of communication equipment (y18) | Failure of radio equipment (x45) | 1 | ||
| Factors of humans and management (h3) | Inappropriate personnel operation (z7) | Violation operation (y19) | Violation of hot work (x46) | 2 |
| Violation of towing operation (x47) | 2 | |||
| Wrong wellhead connection (x48) | 1 | |||
| Weak fixation of equipment (y20) | Weak fixation of cargos (x49) | 2 | ||
| Weak fixation of lifeboats (x50) | 1 | |||
| Lack of risk management (z8) | Lack of risk awareness (y21) | Inadequate risk perception (x51) | 12 | |
| Inadequate risk response (x52) | 12 | |||
| Inadequate safety training (y22) | Inadequate preventive measures (x53) | 1 | ||
| Inadequate accident treatment experience (x54) | 5 | |||
| Inadequate emergency management (z9) | Insufficient emergency equipment (y23) | Insufficient auxiliary vessels (x55) | 1 | |
| Insufficient lifeboats (x56) | 1 | |||
| Insufficient emergency protective equipment (x57) | 1 | |||
| Incomplete rules and regulations (y24) | Incomplete operation procedures (x58) | 2 | ||
| Incomplete emergency plans (x59) | 1 | |||
| Inappropriate emergency operation (y25) | Inappropriate emergency decision making (x60) | 3 | ||
| Inappropriate emergency commands (x61) | 1 | |||
| Inappropriate emergency measures (x62) | 3 | |||
| Inappropriate emergency rescues (x63) | 3 |
| Node | CCi/10−1 | BCi | Node | CCi/10−1 | BCi | Node | CCi/10−1 | BCi | Node | CCi/10−1 | BCi |
|---|---|---|---|---|---|---|---|---|---|---|---|
| x1 | 1.98 | 0.00 | x17 | 0.83 | 38.54 | x33 | 1.25 | 180.44 | x49 | 3.00 | 18.13 |
| x2 | 1.78 | 6.00 | x18 | 1.67 | 28.00 | x34 | 1.19 | 35.67 | x50 | 3.00 | 15.25 |
| x3 | 3.45 | 0.00 | x19 | 5.00 | 0.00 | x35 | 1.67 | 6.67 | x51 | 0.83 | 0.00 |
| x4 | 2.50 | 0.00 | x20 | 0.00 | 2.12 | x36 | 3.01 | 37.33 | x52 | 1.67 | 12.96 |
| x5 | 0.44 | 0.00 | x21 | 2.45 | 8.00 | x37 | 2.24 | 246.74 | x53 | 1.48 | 101.11 |
| x6 | 0.00 | 0.00 | x22 | 2.27 | 0.00 | x38 | 0.50 | 261.10 | x54 | 2.00 | 0.00 |
| x7 | 1.81 | 75.72 | x23 | 2.42 | 93.12 | x39 | 3.00 | 6.83 | x55 | 4.50 | 0.92 |
| x8 | 1.57 | 85.52 | x24 | 2.36 | 13.35 | x40 | 2.22 | 17.65 | x56 | 4.50 | 0.92 |
| x9 | 1.58 | 131.13 | x25 | 2.62 | 59.22 | x41 | 1.25 | 356.00 | x57 | 4.50 | 0.92 |
| x10 | 2.03 | 47.59 | x26 | 2.00 | 75.23 | x42 | 2.32 | 38.25 | x58 | 1.67 | 22.00 |
| x11 | 2.48 | 16.81 | x27 | 2.09 | 8.45 | x43 | 1.19 | 0.00 | x59 | 3.00 | 2.00 |
| x12 | 2.21 | 114.51 | x28 | 2.00 | 0.00 | x44 | 5.00 | 0.00 | x60 | 3.67 | 0.00 |
| x13 | 2.28 | 100.28 | x29 | 2.08 | 0.00 | x45 | 0.00 | 55.90 | x61 | 3.67 | 0.00 |
| x14 | 2.50 | 3.14 | x30 | 2.08 | 0.00 | x46 | 1.67 | 2.58 | x62 | 2.86 | 1.50 |
| x15 | 5.00 | 0.00 | x31 | 1.21 | 213.13 | x47 | 1.00 | 34.92 | x63 | 2.33 | 5.25 |
| x16 | 1.00 | 62.54 | x32 | 1.43 | 112.70 | x48 | 5.00 | 0.00 |
| No. | Code | Shortest Path | Length | No. | Code | Shortest Path | Length |
|---|---|---|---|---|---|---|---|
| 1 | path_1 | x1 → x2 → x31 | 4.61 | 23 | path_9A | x51 → x17 → x33 | 9.21 |
| 2 | path_2 | x2 → x31 | 2.30 | 24 | path_9B | x51 → x53 → x17 → x33 | |
| 3 | path_3A | x3 → x9 → x24 → x31 | 13.82 | 25 | path_9C | x51 → x52 → x53 → x17 → x33 | |
| 4 | path_3B | x3 → x9 → x37 → x31 | 26 | path_10 | x52 → x53 → x17 → x33 | 6.91 | |
| 5 | path_3C | x3 → x10 → x24 → x31 | 27 | path_11 | x1 → x37 | ||
| 6 | path_3D | x3 → x11 → x37 → x31 | 28 | path_12 | x2 → x37 | ||
| 7 | path_3E | x3 → x9 → x23 → x37 → x31 | 29 | path_13A | x3 → x9 → x37 | 11.51 | |
| 8 | path_3F | x3 → x9 → x24 → x37 → x31 | 30 | path_13B | x3 → x11 → x37 | ||
| 9 | path_3G | x3 → x10 → x23 → x37 → x31 | 31 | path_13C | x3 → x9 → x23 → x37 | ||
| 10 | path_3H | x3 → x10 → x24 → x37 → x31 | 32 | path_13D | x3 → x9 → x24 → x37 | ||
| 11 | path_4 | x51 → x20 → x31 | 6.91 | 33 | path_13E | x3 → x10 → x23 → x37 | |
| 12 | path_5A | x52 → x58 → x47 → x31 | 11.51 | 34 | path_13F | x3 → x10 → x24 → x37 | |
| 13 | path_5B | x52 → x53 → x16 → x32 → x37 → x31 | 35 | path_14A | x51 → x14 → x23 → x37 | 11.51 | |
| 14 | path_5C | x52 → x53 → x17 → x33 → x37 → x31 | 36 | path_14B | x51 → x16 → x32 → x37 | ||
| 15 | path_6A | x1 → x2 → x33 | 9.21 | 37 | path_14C | x51 → x17 → x33 → x37 | |
| 16 | path_6B | x1 → x2 → x31 → x33 | 38 | path_14D | x51 → x53 → x16 → x32 → x37 | ||
| 17 | path_6C | x1 → x9 → x26 → x33 | 39 | path_14E | x51 → x53 → x17 → x33 → x37 | ||
| 18 | path_6D | x1 → x10 → x26 → x33 | 40 | path_14F | x51 → x52 → x53 → x16 → x32 → x37 | ||
| 19 | path_7A | x2 → x33 | 6.91 | 41 | path_14G | x51 → x52 → x53 → x17 → x33 → x37 | |
| 20 | path_7B | x2 → x31 → x33 | 42 43 | path_15A path_15B | x52 → x53 → x16 → x32 → x37 x52 → x53 → x17 → x33 → x37 | 9.21 | |
| 21 | path_8A | x3 → x9 → x26 → x33 | 11.51 | ||||
| 22 | path_8B | x3 → x10 → x26 → x33 |
| Code | GE/10−2 | MK | MS | PS | Sorting | Code | GE/10−2 | MK | MS | PS | Sorting |
|---|---|---|---|---|---|---|---|---|---|---|---|
| path_3A | 3.80 | 18 | 5 | 0.76 | 6 | path_9A | 4.03 | 21 | 2 | 2.00 | 3 |
| path_3B | 3.60 | 18 | 6 | 1.57 | 5 | path_9B | 3.76 | 21 | 2 | 2.80 | 2 |
| path_3C | 3.88 | 19 | 4 | 0.00 | 8 | path_9C | 3.69 | 21 | 2 | 3.00 | 1 |
| path_3D | 3.70 | 19 | 5 | 0.75 | 7 | path_13A | 3.85 | 19 | 2 | 1.70 | 4 |
| path_3E | 3.45 | 15 | 6 | 2.67 | 1 | path_13B | 3.95 | 20 | 0 | 0.00 | 6 |
| path_3F | 3.49 | 16 | 7 | 2.65 | 2 | path_13C | 3.77 | 18 | 3 | 3.00 | 1 |
| path_3G | 3.53 | 16 | 6 | 2.24 | 3 | path_13D | 3.80 | 18 | 3 | 2.81 | 2 |
| path_3H | 3.57 | 17 | 7 | 2.23 | 4 | path_13E | 3.84 | 19 | 2 | 1.75 | 3 |
| path_5A | 3.90 | 21 | 0 | 0.00 | 3 | path_13F | 3.88 | 19 | 2 | 1.56 | 5 |
| path_5B | 3.45 | 19 | 1 | 2.51 | 2 | path_14A | 4.00 | 20 | 0 | 0.00 | 7 |
| path_5C | 3.37 | 18 | 1 | 3.00 | 1 | path_14B | 3.93 | 20 | 2 | 0.63 | 6 |
| path_6A | 3.75 | 20 | 1 | 2.09 | 3 | path_14C | 3.84 | 19 | 2 | 1.81 | 4 |
| path_6B | 3.97 | 21 | 1 | 1.00 | 4 | path_14D | 3.65 | 20 | 4 | 1.67 | 5 |
| path_6C | 3.68 | 18 | 1 | 3.00 | 1 | path_14E | 3.56 | 19 | 4 | 2.85 | 2 |
| path_6D | 3.75 | 19 | 1 | 2.42 | 2 | path_14F | 3.58 | 20 | 4 | 1.81 | 3 |
| path_7A | 3.79 | 20 | 0 | 3.00 | 1 | path_14G | 3.48 | 19 | 4 | 3.00 | 1 |
| path_7B | 4.01 | 21 | 0 | 1.00 | 2 | path_15A | 3.65 | 20 | 1 | 1.00 | 2 |
| path_8A | 3.68 | 18 | 1 | 3.00 | 1 | path_15B | 3.80 | 19 | 1 | 3.00 | 1 |
| path_8B | 3.75 | 19 | 1 | 1.00 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, G.; Chen, G.; Zhu, J.; Meng, X.; Li, X. Modeling the Evolution of Major Storm-Disaster-Induced Accidents in the Offshore Oil and Gas Industry. Int. J. Environ. Res. Public Health 2022, 19, 7216. https://doi.org/10.3390/ijerph19127216
Zhu G, Chen G, Zhu J, Meng X, Li X. Modeling the Evolution of Major Storm-Disaster-Induced Accidents in the Offshore Oil and Gas Industry. International Journal of Environmental Research and Public Health. 2022; 19(12):7216. https://doi.org/10.3390/ijerph19127216
Chicago/Turabian StyleZhu, Gaogeng, Guoming Chen, Jingyu Zhu, Xiangkun Meng, and Xinhong Li. 2022. "Modeling the Evolution of Major Storm-Disaster-Induced Accidents in the Offshore Oil and Gas Industry" International Journal of Environmental Research and Public Health 19, no. 12: 7216. https://doi.org/10.3390/ijerph19127216
APA StyleZhu, G., Chen, G., Zhu, J., Meng, X., & Li, X. (2022). Modeling the Evolution of Major Storm-Disaster-Induced Accidents in the Offshore Oil and Gas Industry. International Journal of Environmental Research and Public Health, 19(12), 7216. https://doi.org/10.3390/ijerph19127216