
Quantification of the Psychoacoustic Effect of Noise from Small Unmanned Aerial Vehicles

 , ,
, ,  ,
,
Abstract
:1. Introduction
- Turbulent inflow noise, which can produce significant ‘quasi-tonal noise’ at harmonics of the blade passing frequency. This noise source requires the flow incident on the propeller disc to be turbulent. Turbulent inflow noise can be predicted using a computational method such as that described in [21] or analytical methods such as that described by [22]. Note that tests conducted in anechoic chambers or confined spaces will produce a recirculating flow, which can produce high levels of turbulent inflow noise [23,24];
- The periodic unsteady blade motion caused by the pulsing motion of the propeller blades can also produce tonal noise [25];
- ‘Self-noise’ caused by the unsteady loading on the propeller blades generated by the turbulent flow in the boundary layers, near wake and tip vortex produced by the rotor blades can produce broadband noise at high frequencies [17];
- Blade vortex interaction and blade wake interaction noise caused by the rotor blades interacting with the tip vortex and wake from the preceding rotor blades can produce broadband noise [16].
- a.
- How annoying is the noise from different types of UAVs operating in different flight modes (i.e., hover vs. flyby, high vs. low altitude)?
- b.
- What effect does UAV altitude have on the annoyance caused by UAV noise?
- c.
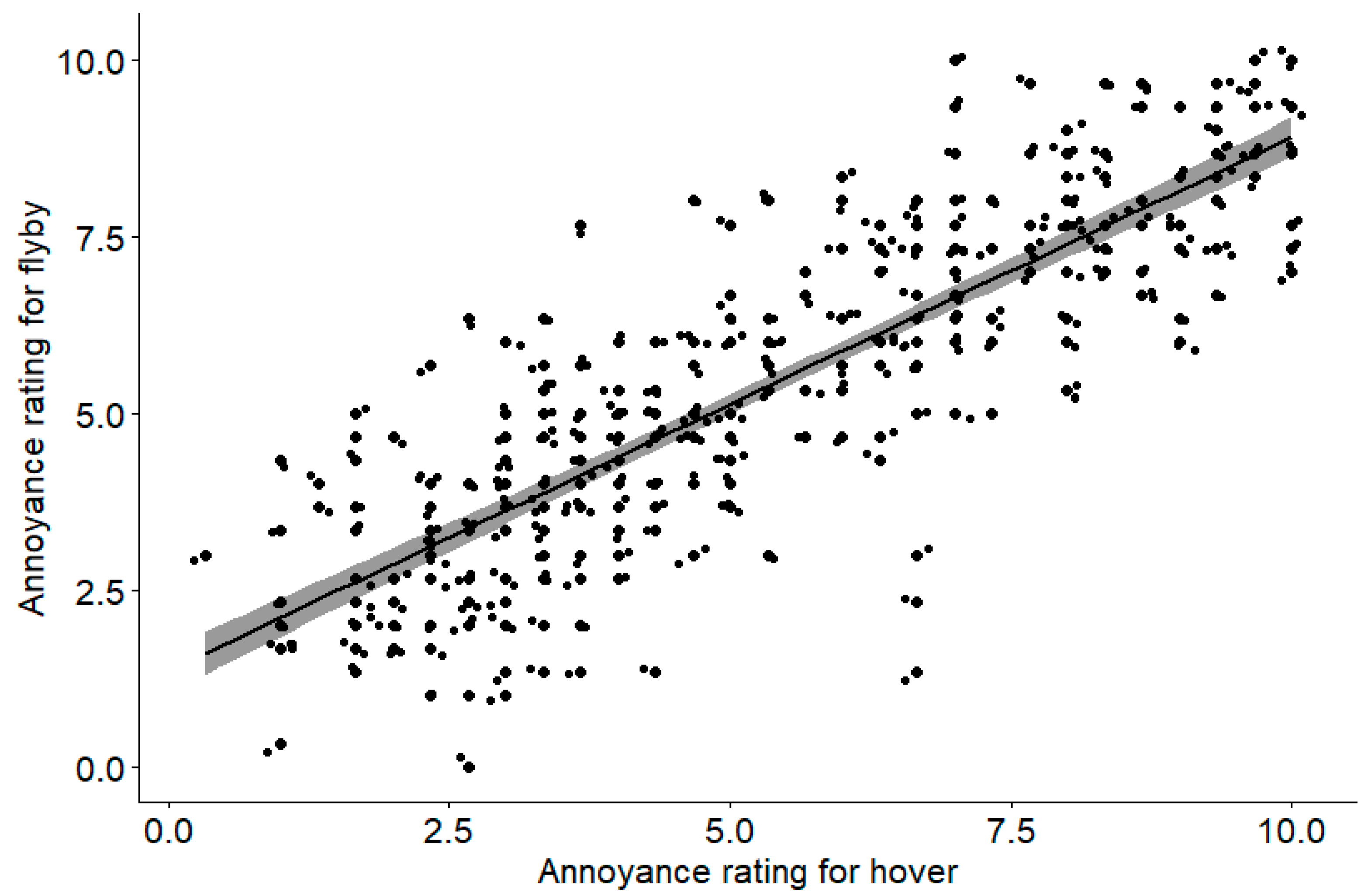
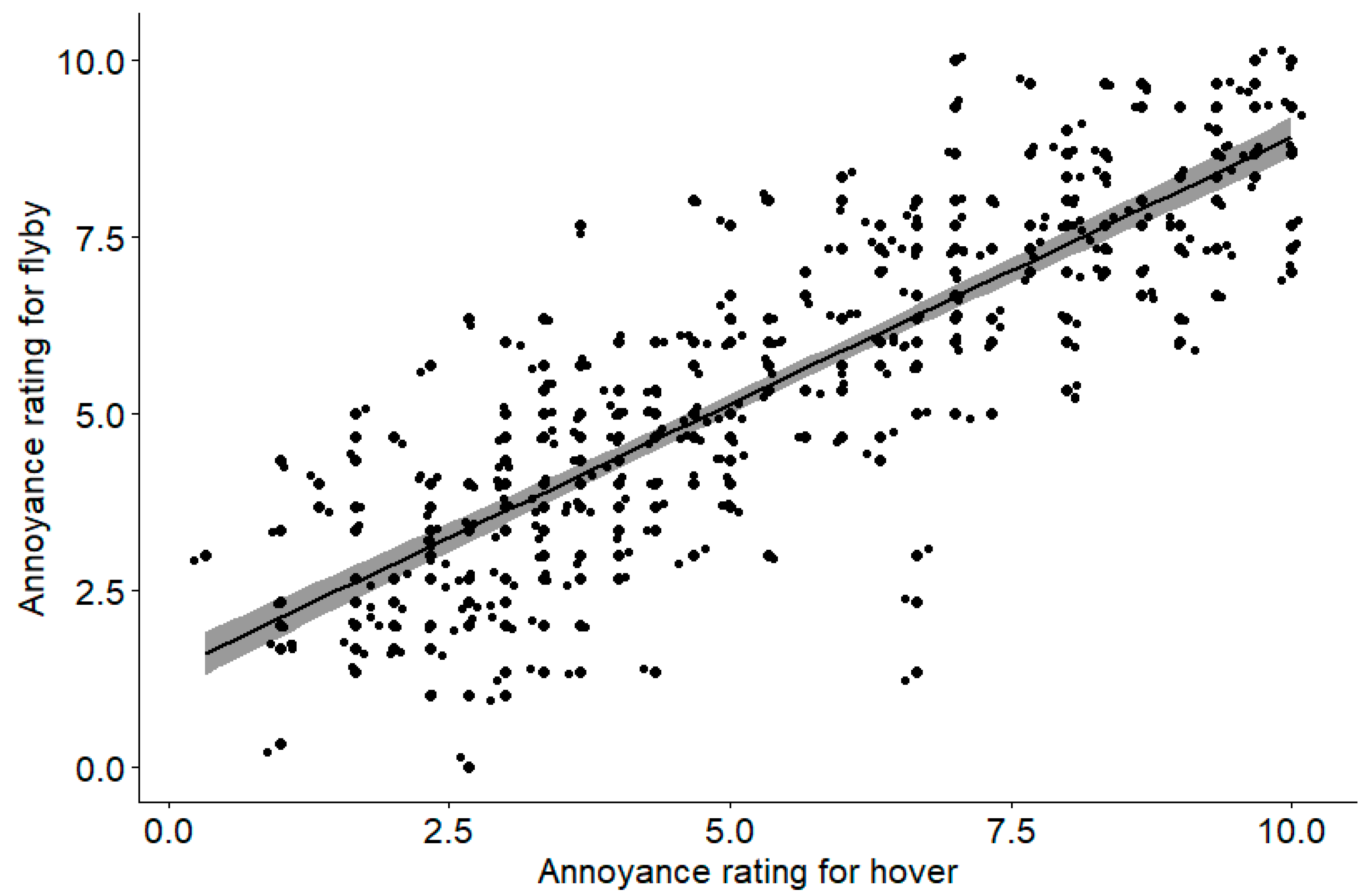
- Is there a relationship between the annoyance caused by the noise produced by a hovering UAV and that produced by a UAV in flyby?
- d.
- What metric correlates best with the annoyance caused by the noise from UAVs operating in either hover or in flyby?
- e.
- How does drone noise affect performance during a cognitive distraction test?
2. Quadcopter UAVs and Flight Conditions
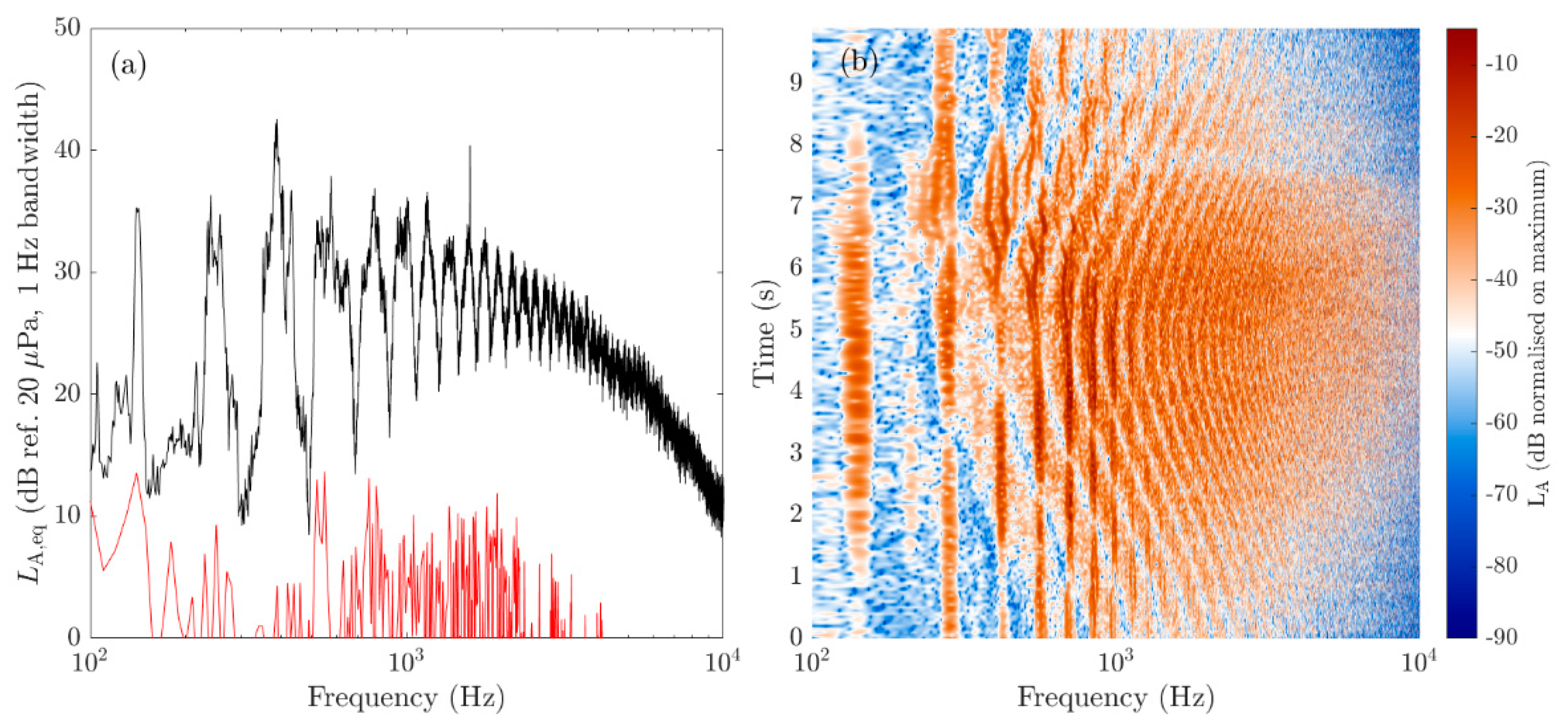
3. Noise Recording/Measurement and Analysis
| F5 | 5th percentile of the time-varying fluctuation strength in vacil calculated according to the methods described in [31] and ISO 532-1 [47] and calculated using Matlab’s Audio Toolbox; |
| LA,eq | A-weighted continuous equivalent sound pressure level; |
| LA,f,max | A-weighted maximum sound pressure level (using a fast time weighting); |
| LA,f,5 | A-weighted sound pressure level exceeded 5% of the time (using a fast time weighting); |
| LPN,m | Mean perceived noise level in dB calculated using the method described in Part 36 of the noise certification requirements of the United States Code of Federal Regulations; |
| LPN,5 | 5th percentile perceived noise level in dB calculated using the method described in Part 36 of the noise certification requirements of the United States Code of Federal Regulations; |
| LTPN,m | Mean tone-corrected perceived noise level in dB calculated using the method described in Part 36 of the noise certification requirements of the United States Code of Federal Regulations; |
| LTPN,5 | 5th percentile tone-corrected perceived noise level in dB calculated using the method described in Part 36 of the noise certification requirements of the United States Code of Federal Regulations; |
| Nm | Mean time-varying loudness in sones based on Zwicker’s method and described in ISO 532-1 [47] and calculated using Matlab’s Audio Toolbox; |
| N5 | 5th percentile of the time-varying loudness in sones based on Zwicker’s method and described in ISO 532-1 [47] and calculated using Matlab’s Audio Toolbox; |
| PA | Zwicker psychoacoustic annoyance (see, for example, [36]) calculated as , where if and if ; and ; |
| Rm | Mean time-varying roughness in aspers based on the method described by [31] and ISO 532-1 [47] and calculated using Matlab’s Audio Toolbox; |
| R5 | 5th percentile of the time-varying roughness in aspers based on the method described by [31] and ISO 532-1 [47] and calculated using Matlab’s Audio Toolbox; |
| S5 | 5th percentile of the time-varying sharpness in acums calculated according to DIN 45692 [48] and ISO 532-1 [47] and calculated using Matlab’s Audio Toolbox. |
| LEA | A-weighted sound exposure level calculated over the period in which the noise level was within 10 dB of the maximum A-weighted sound pressure level, or over the entire recording period if the level never dropped below 10 dB of the maximum A-weighted sound pressure level; |
| LTPN,max | Maximum tone-corrected perceived noise level in dB calculated using the method described in Part 36 of the noise certification requirements of the United States Code of Federal Regulations. |
4. Psychoacoustic Test Procedure and Data Analysis
4.1. Participant Group
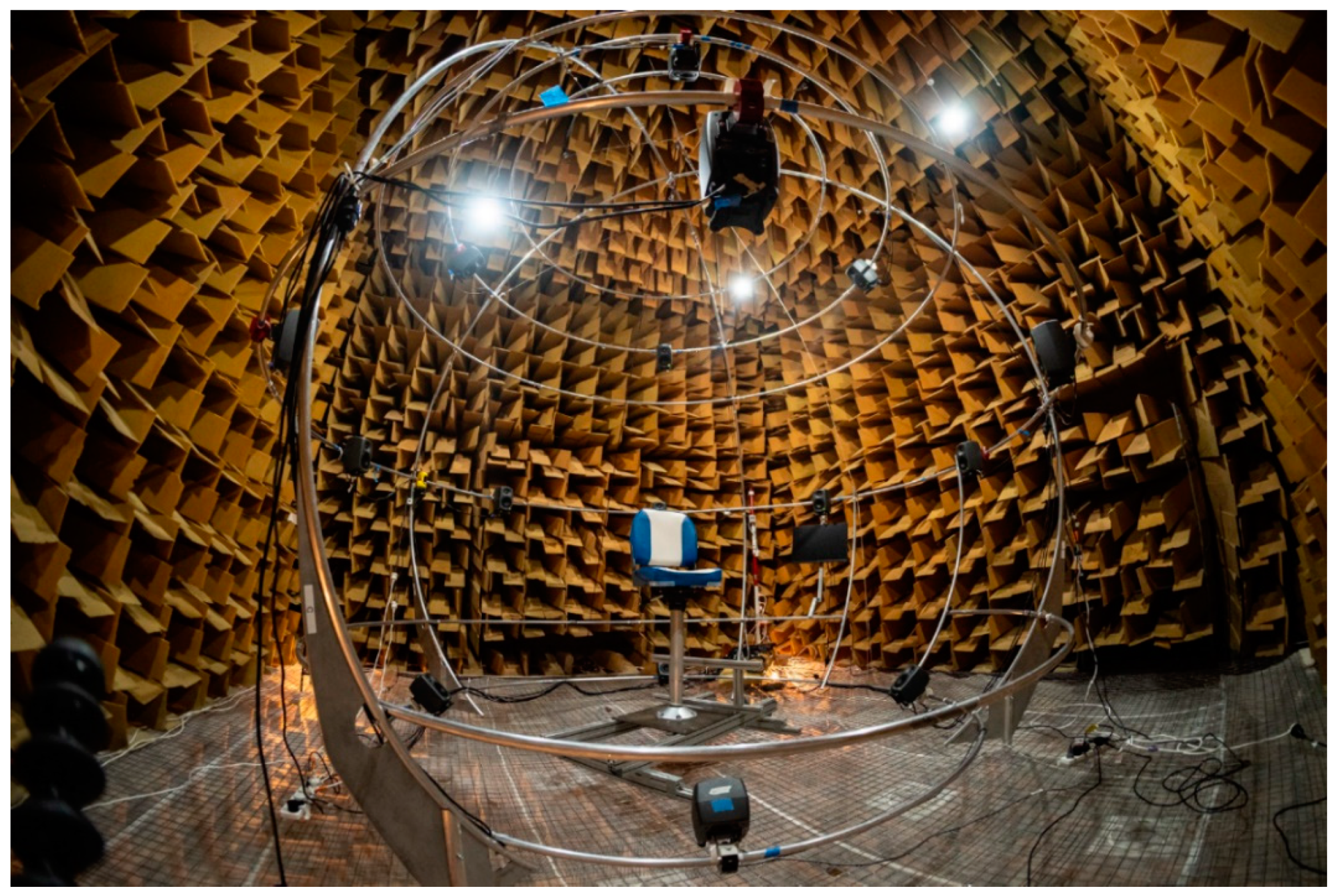
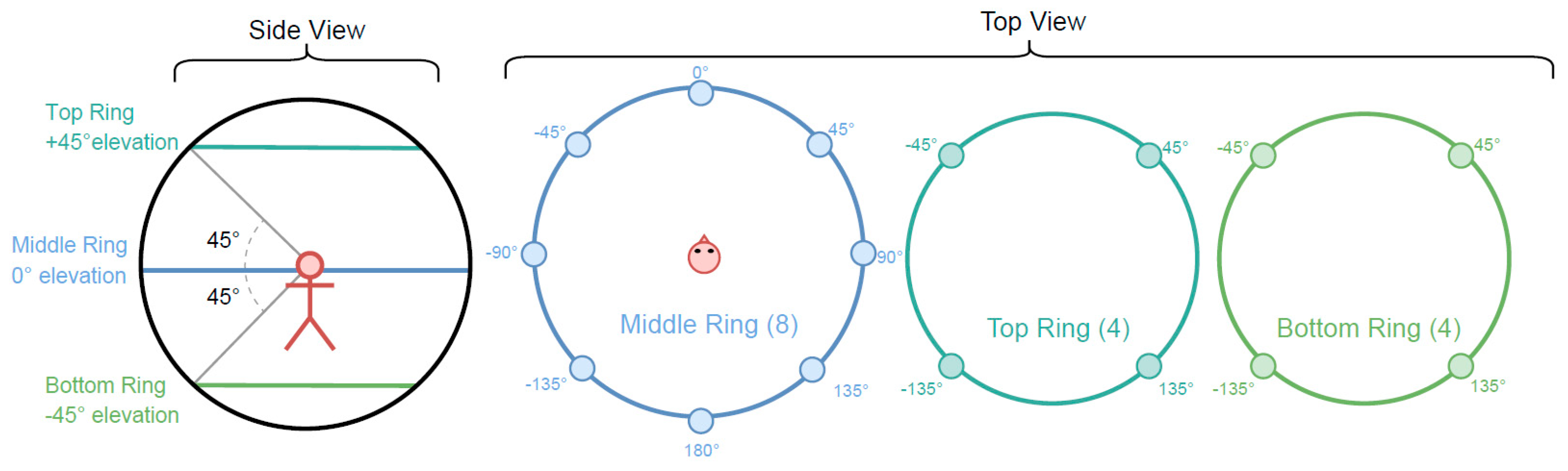
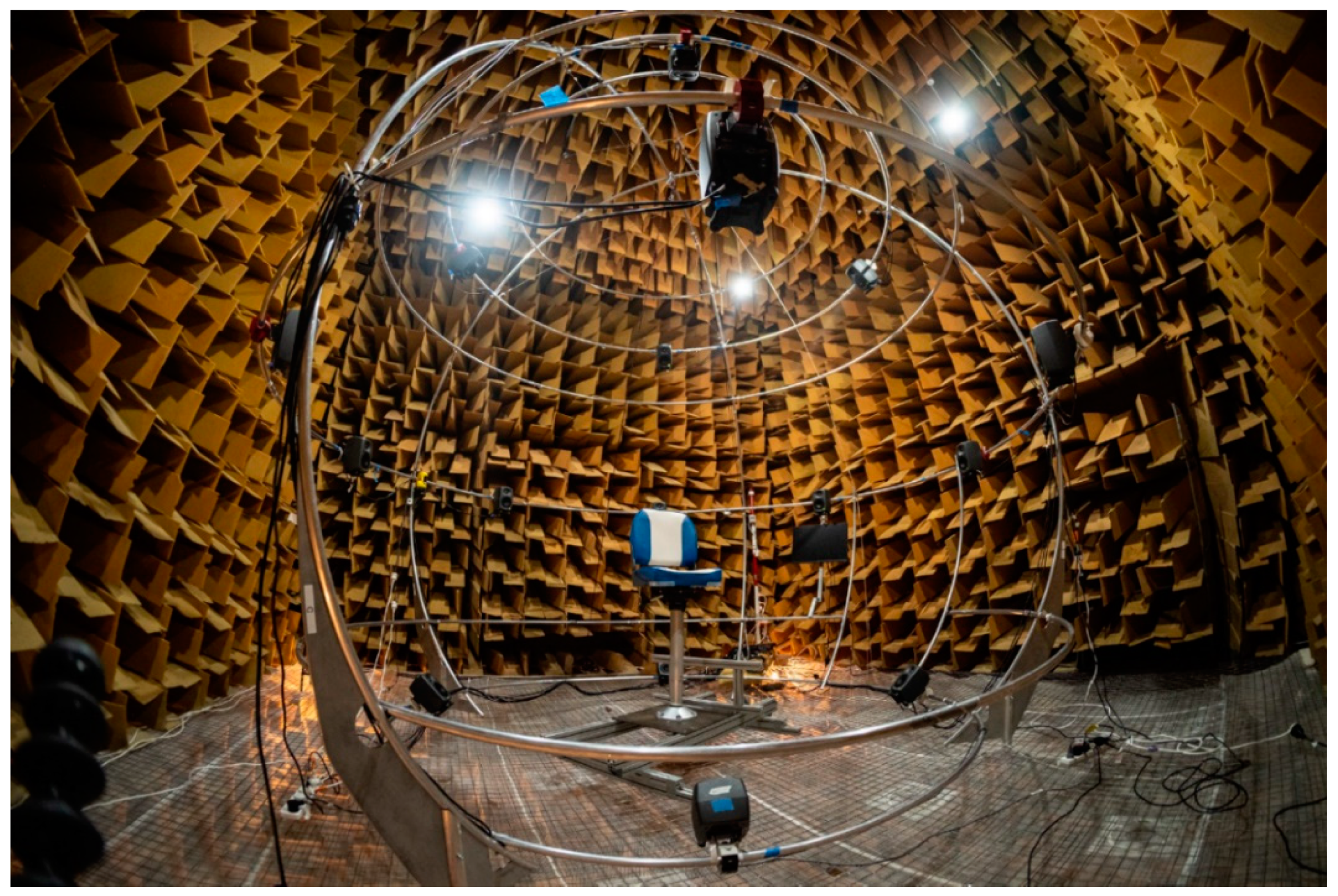
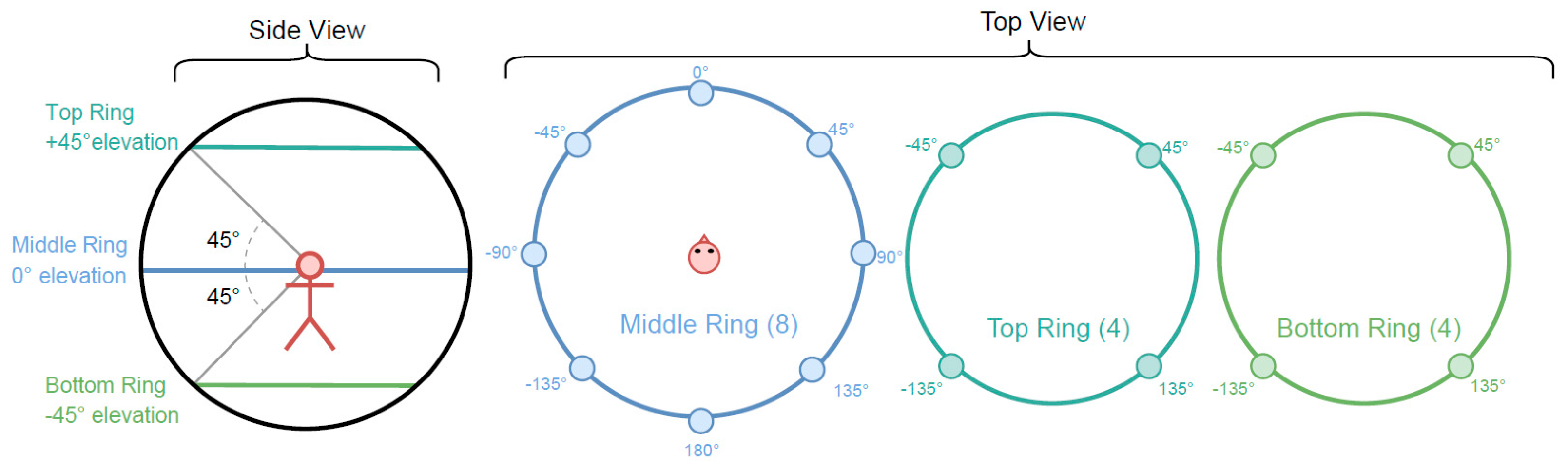
4.2. Sound Reproduction
4.3. Administration of the Questionnaire
Statistical Analysis
5. Results and Discussion
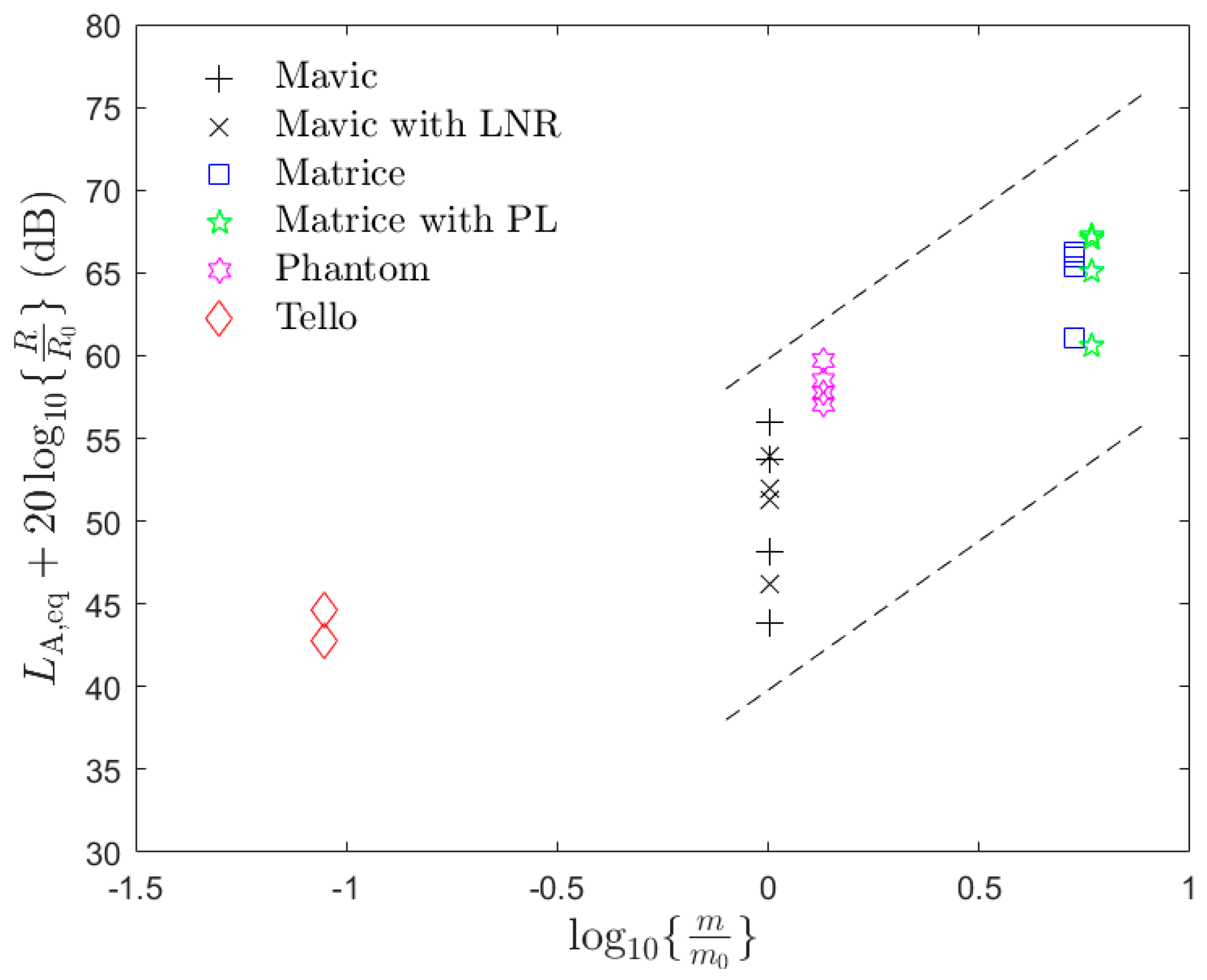
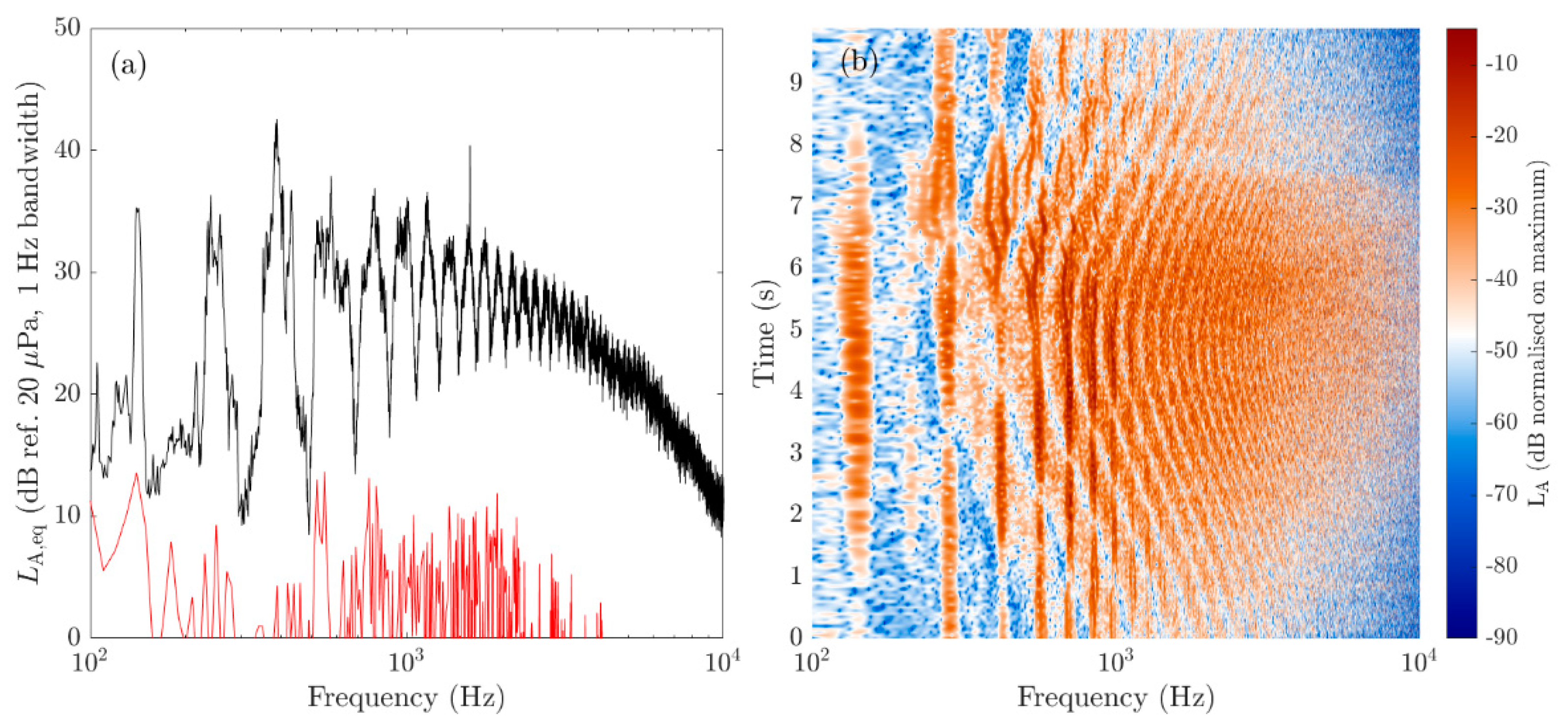
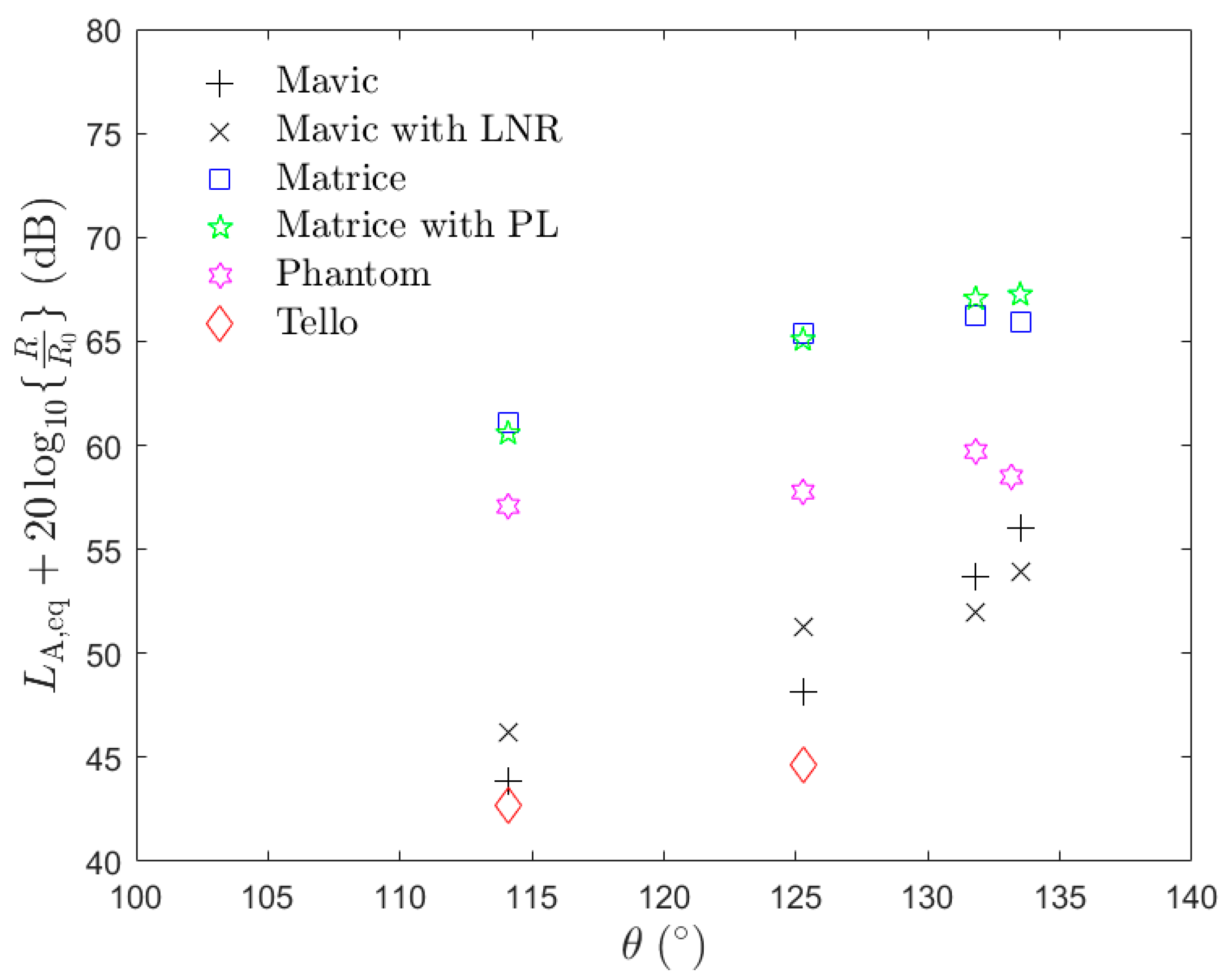
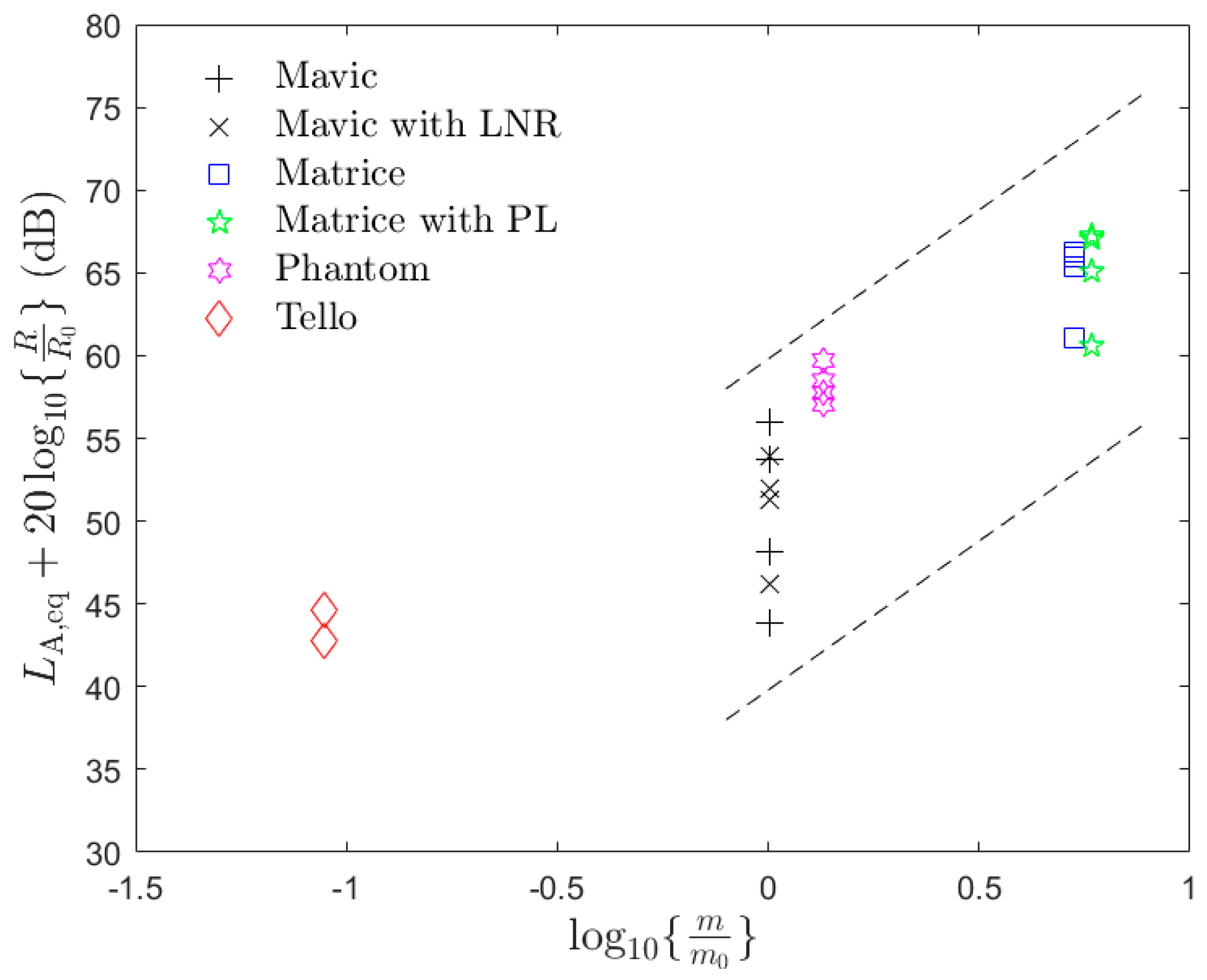
5.1. Noise Level Measurement Results
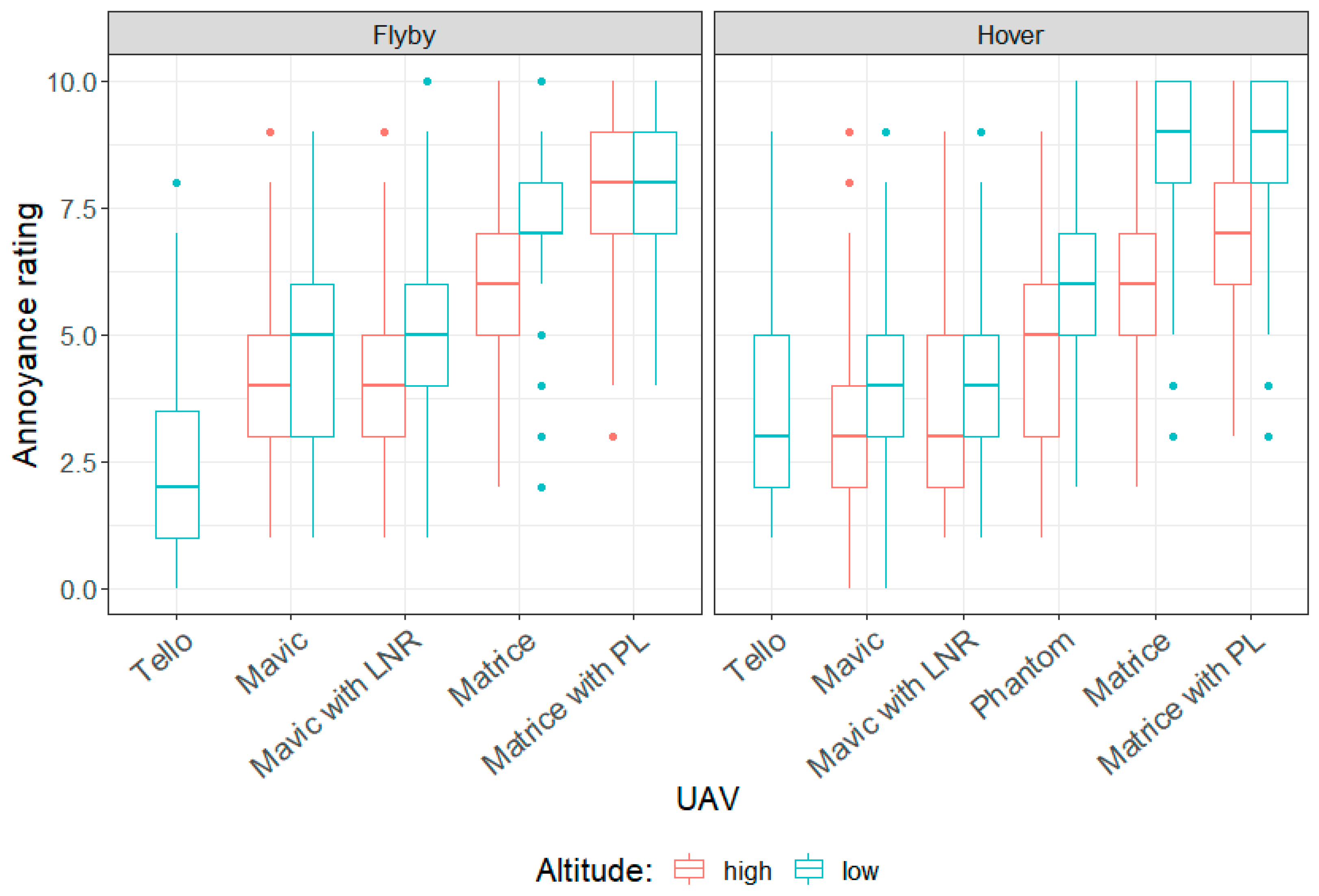
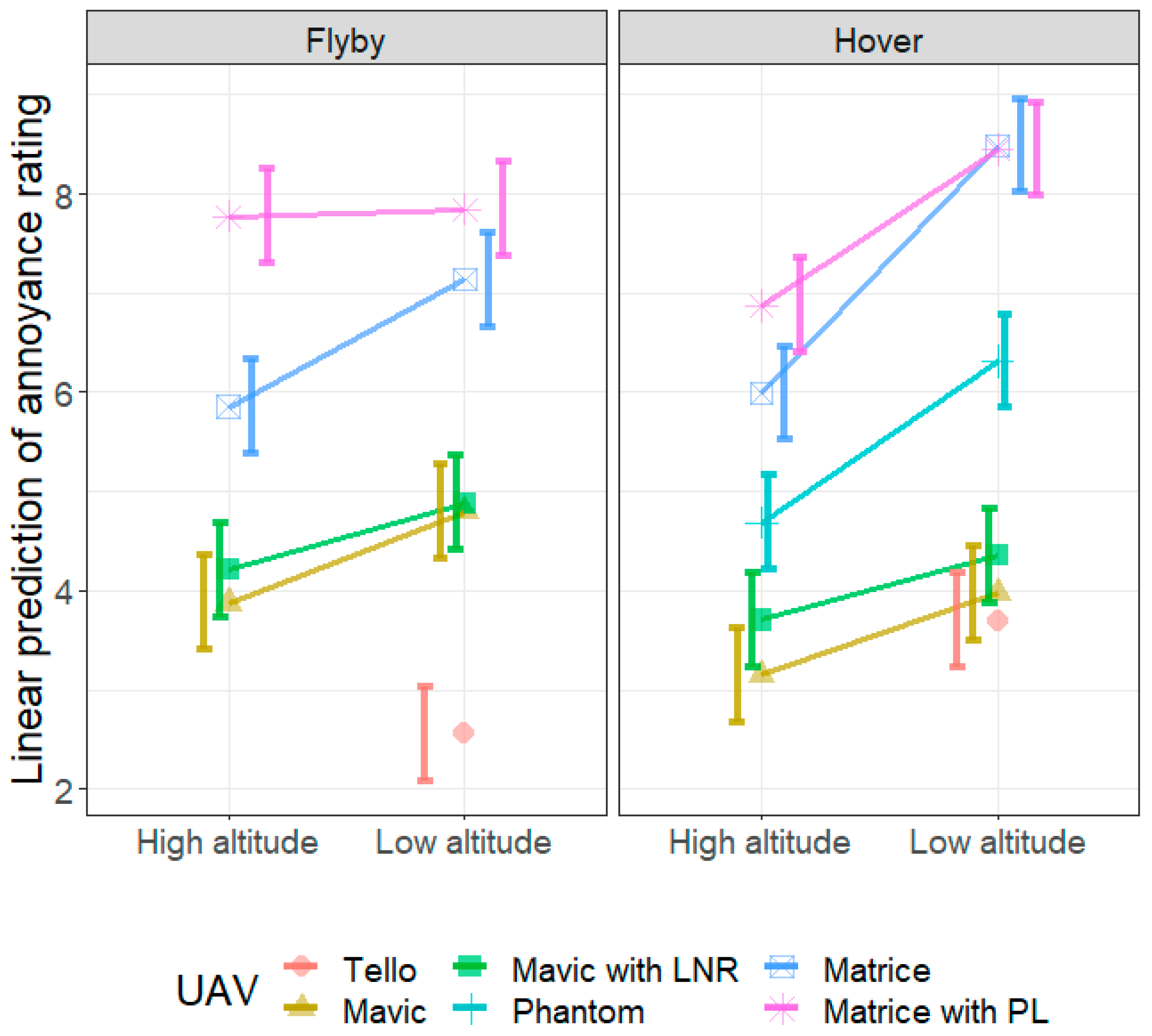
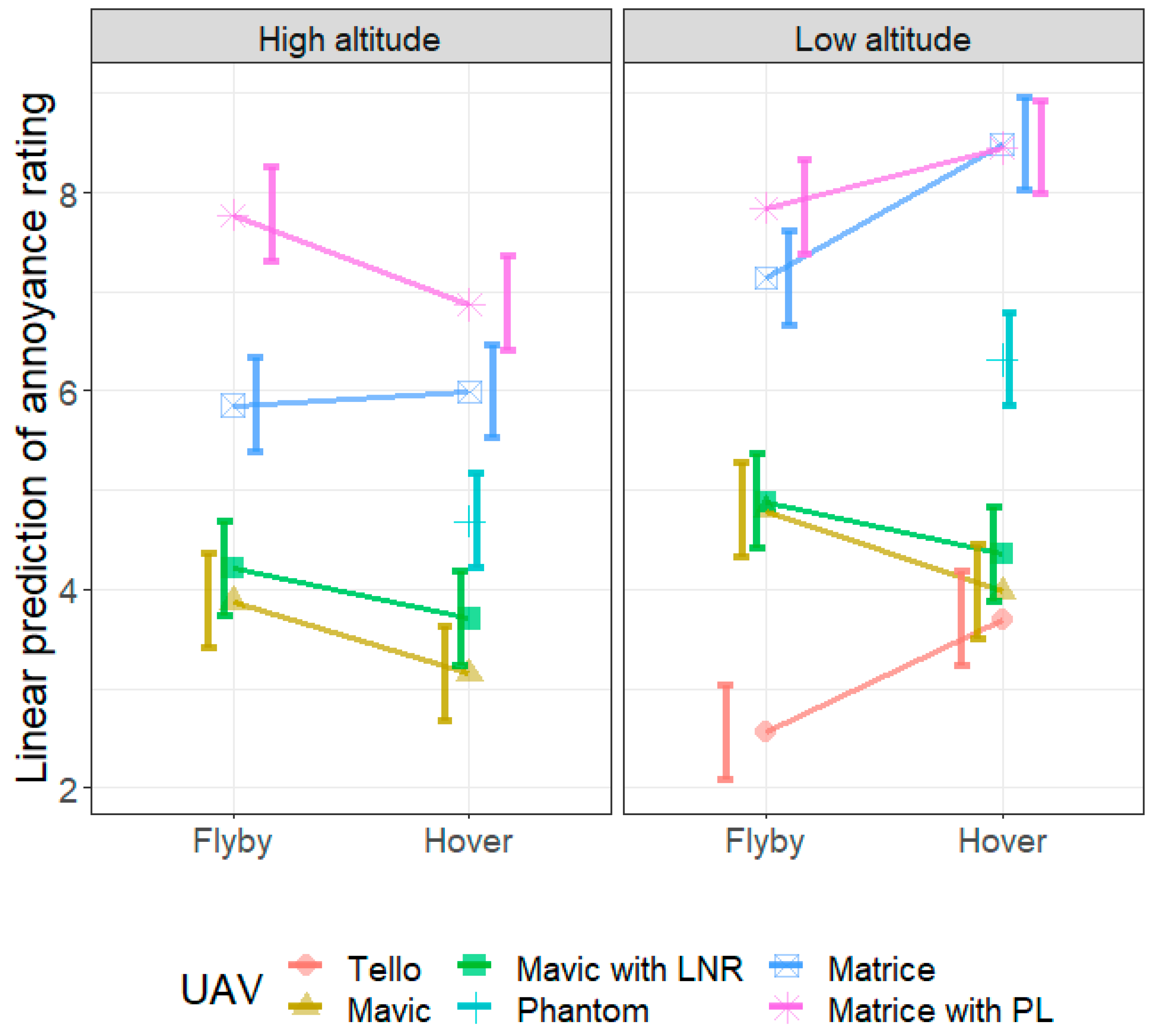
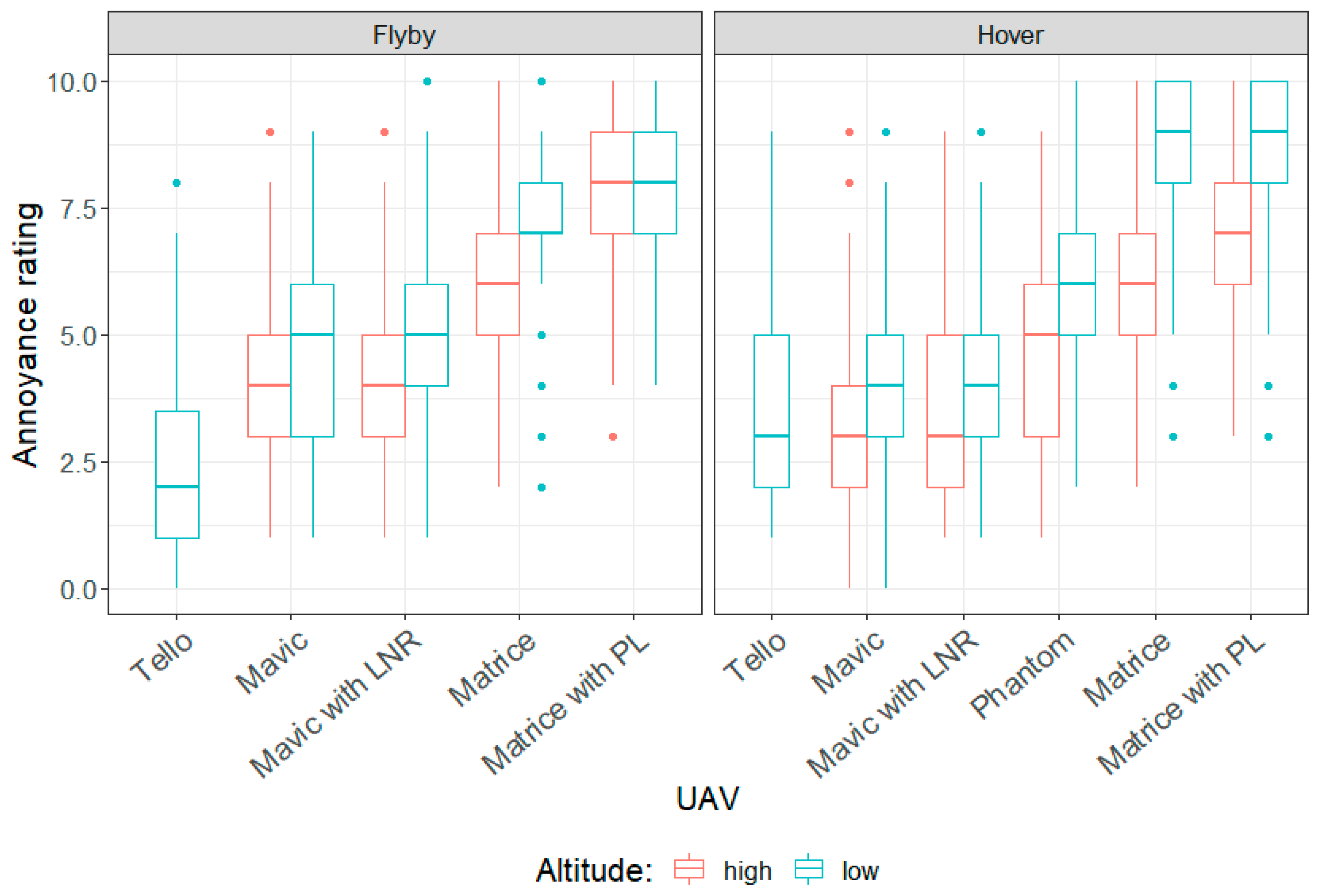
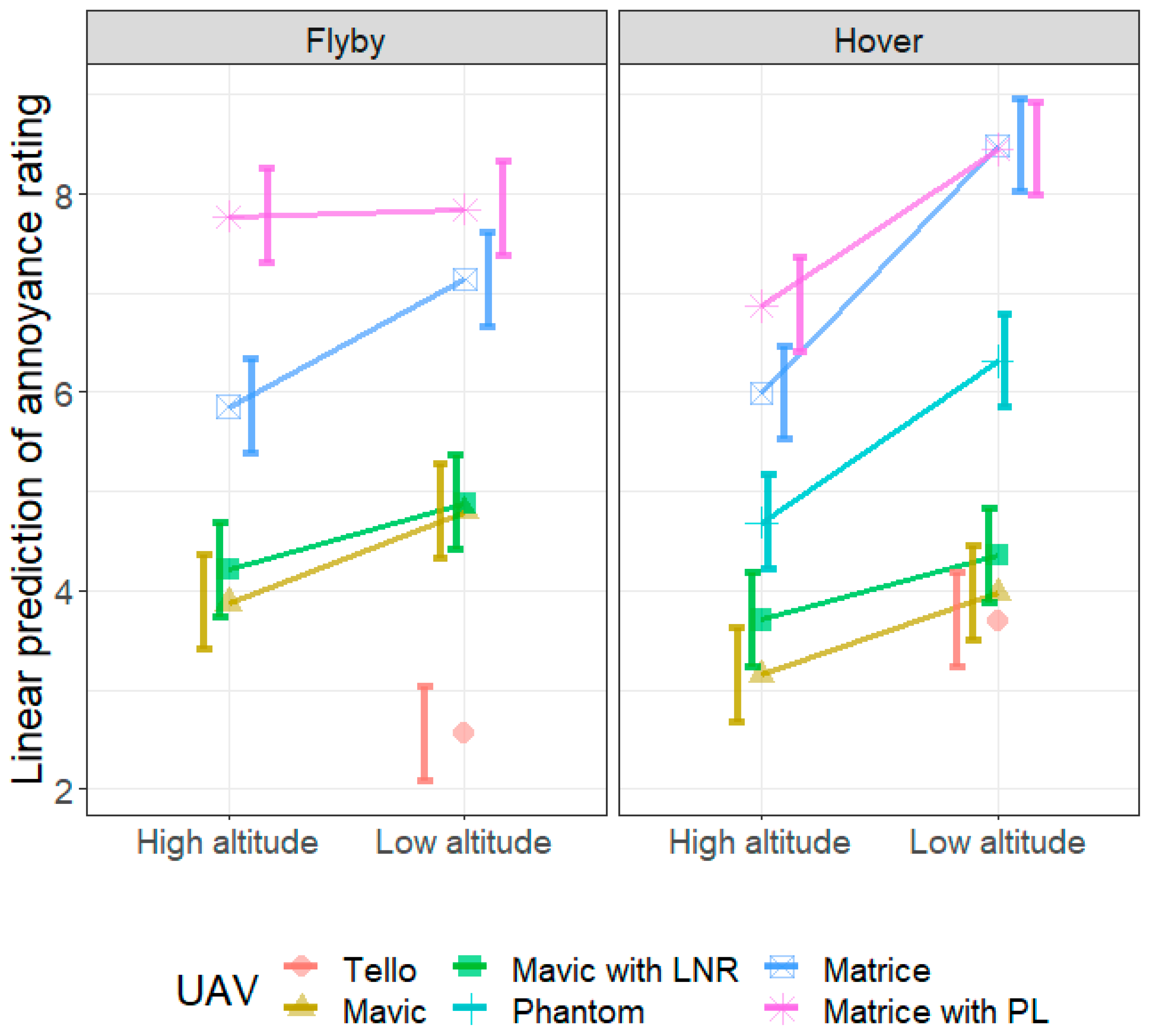
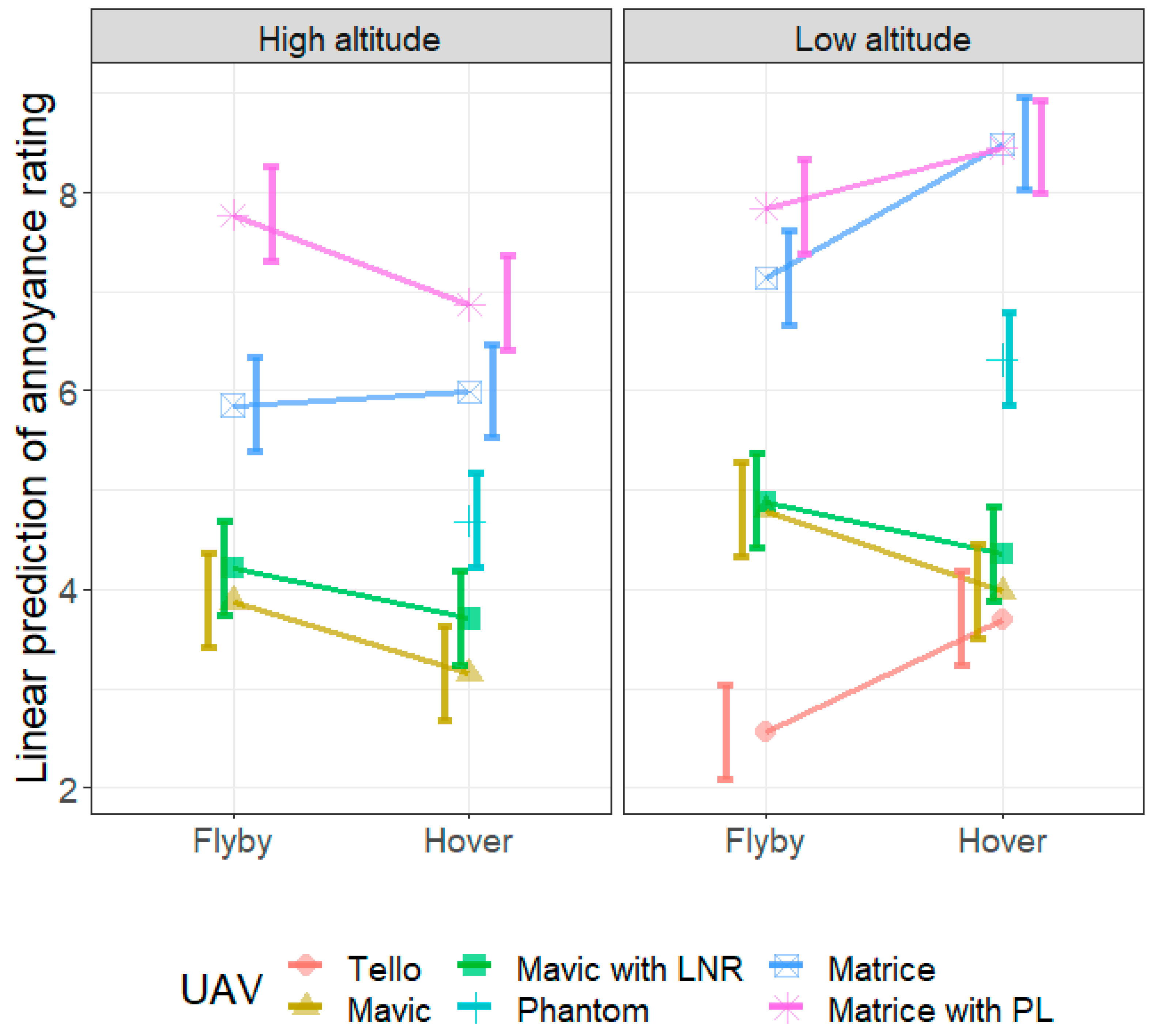
5.2. Annoyance Rating Analysis
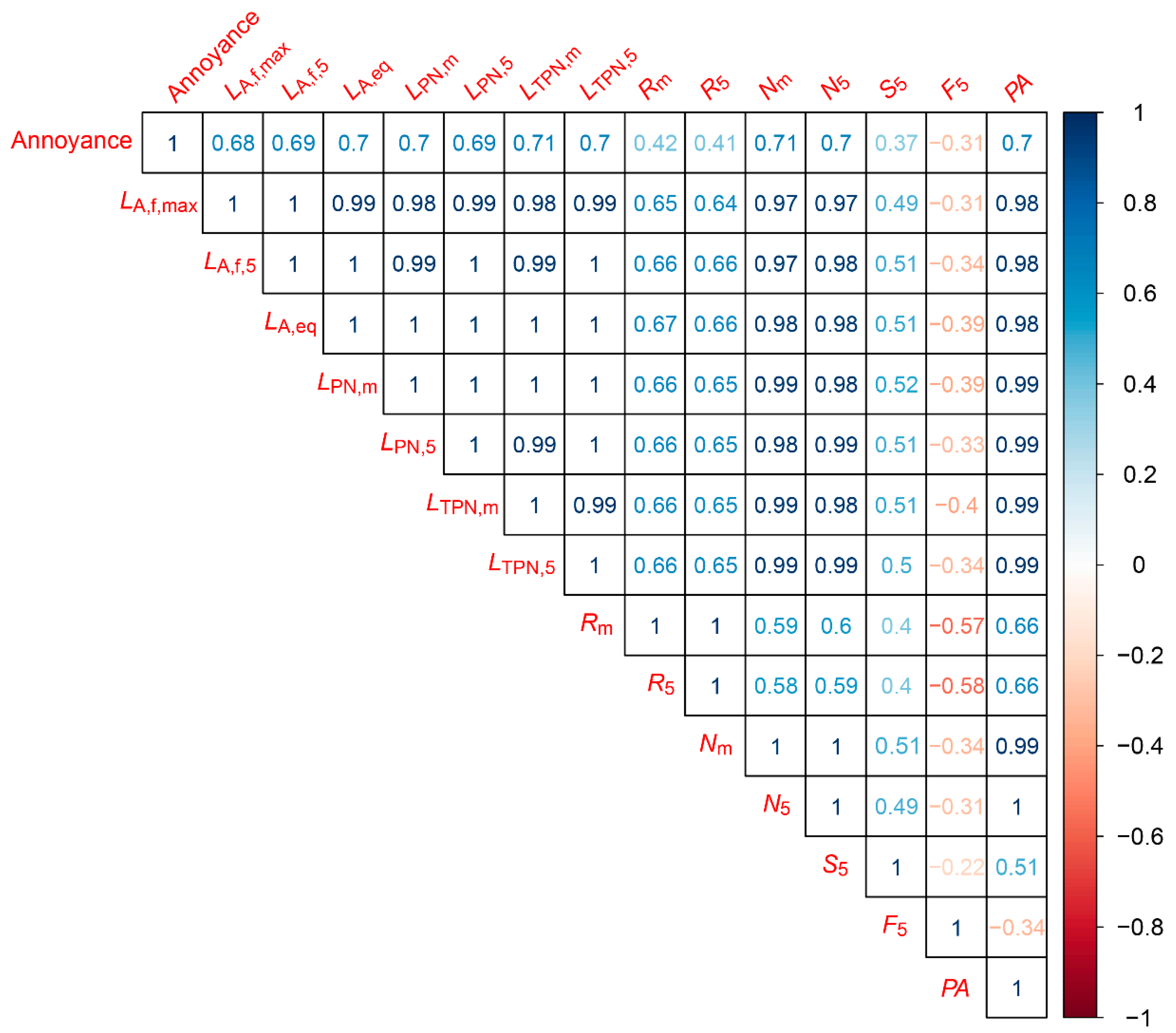
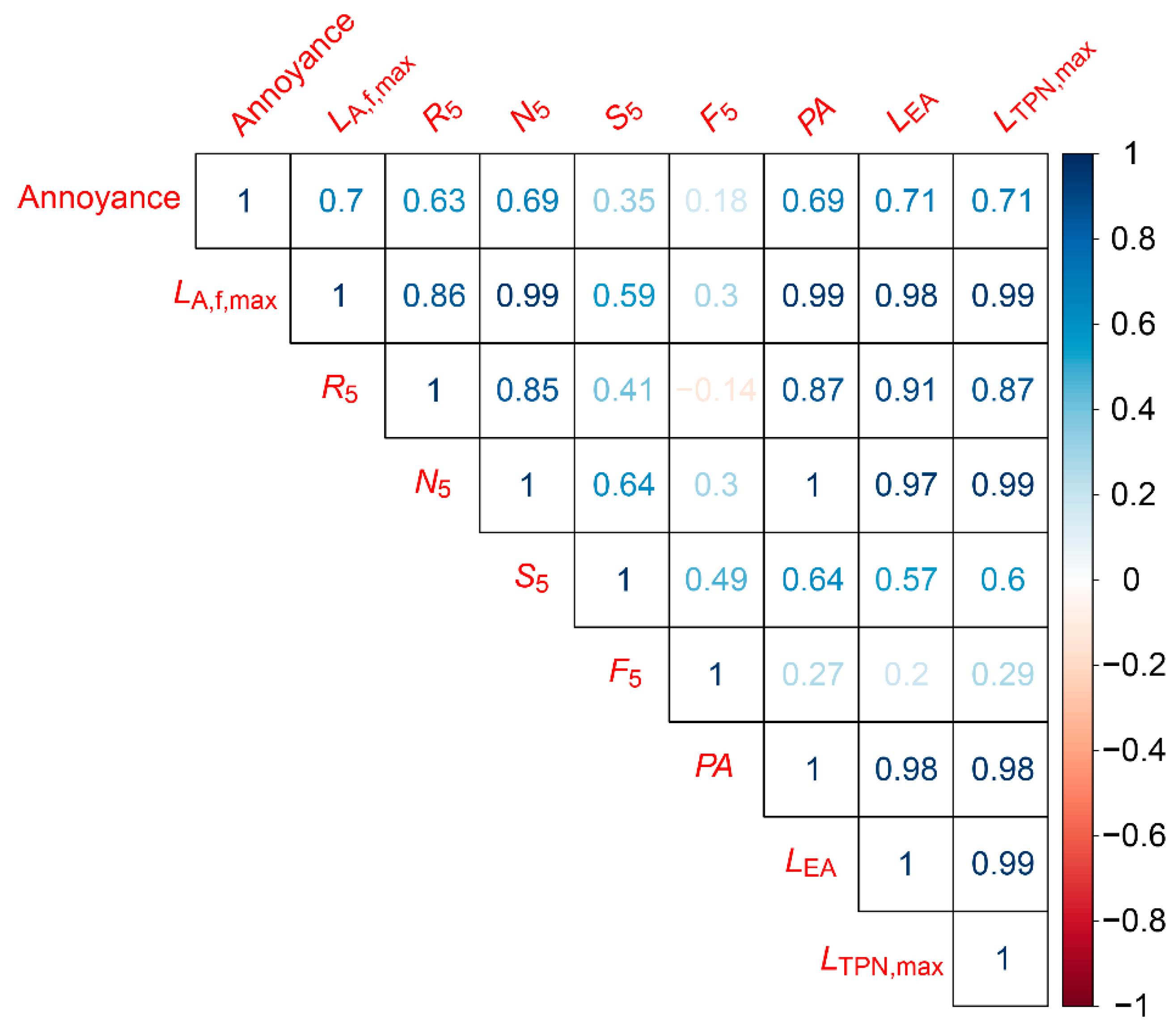
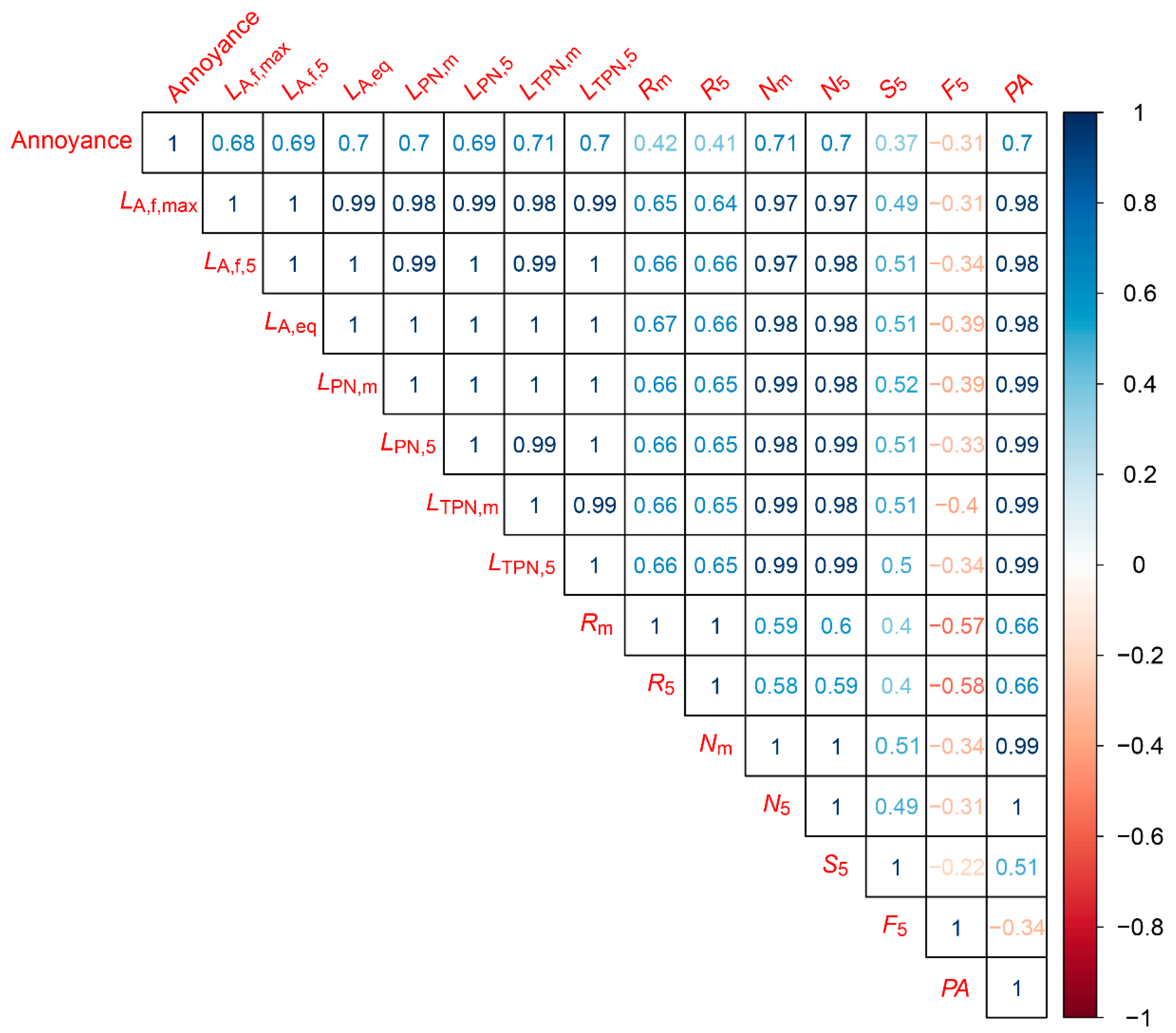
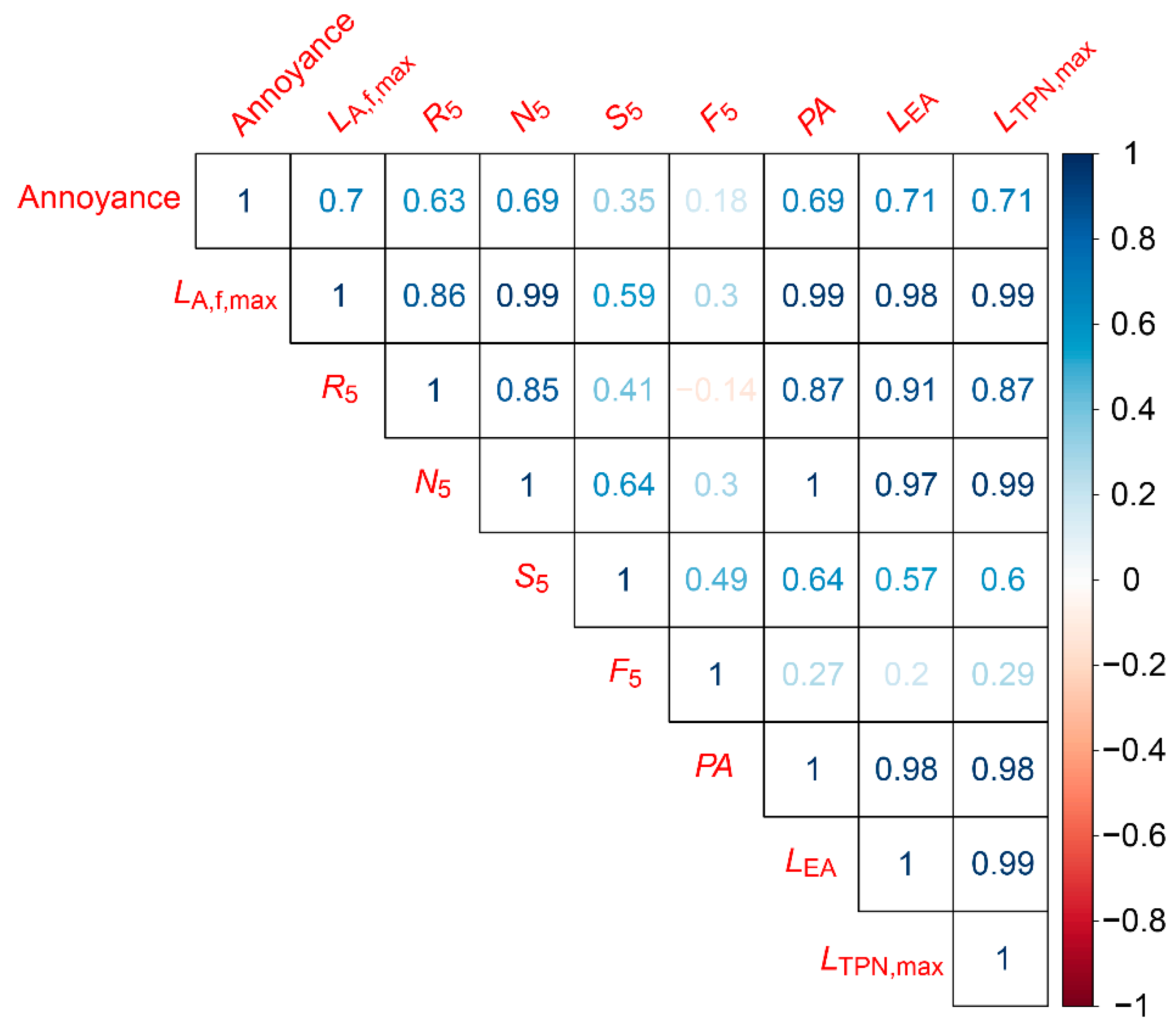
5.3. Correlation between Objective Measurements and Annoyance Ratings
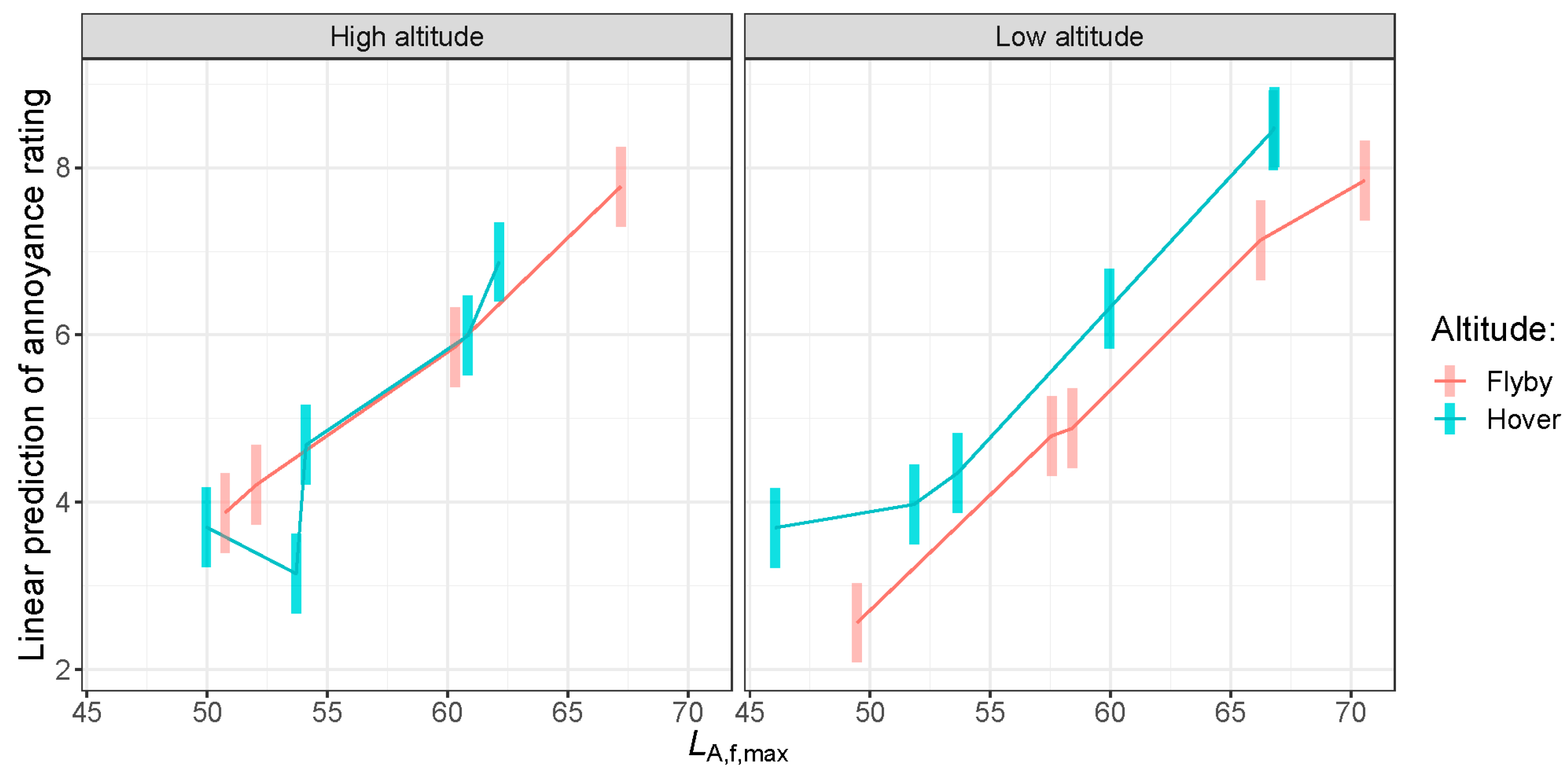
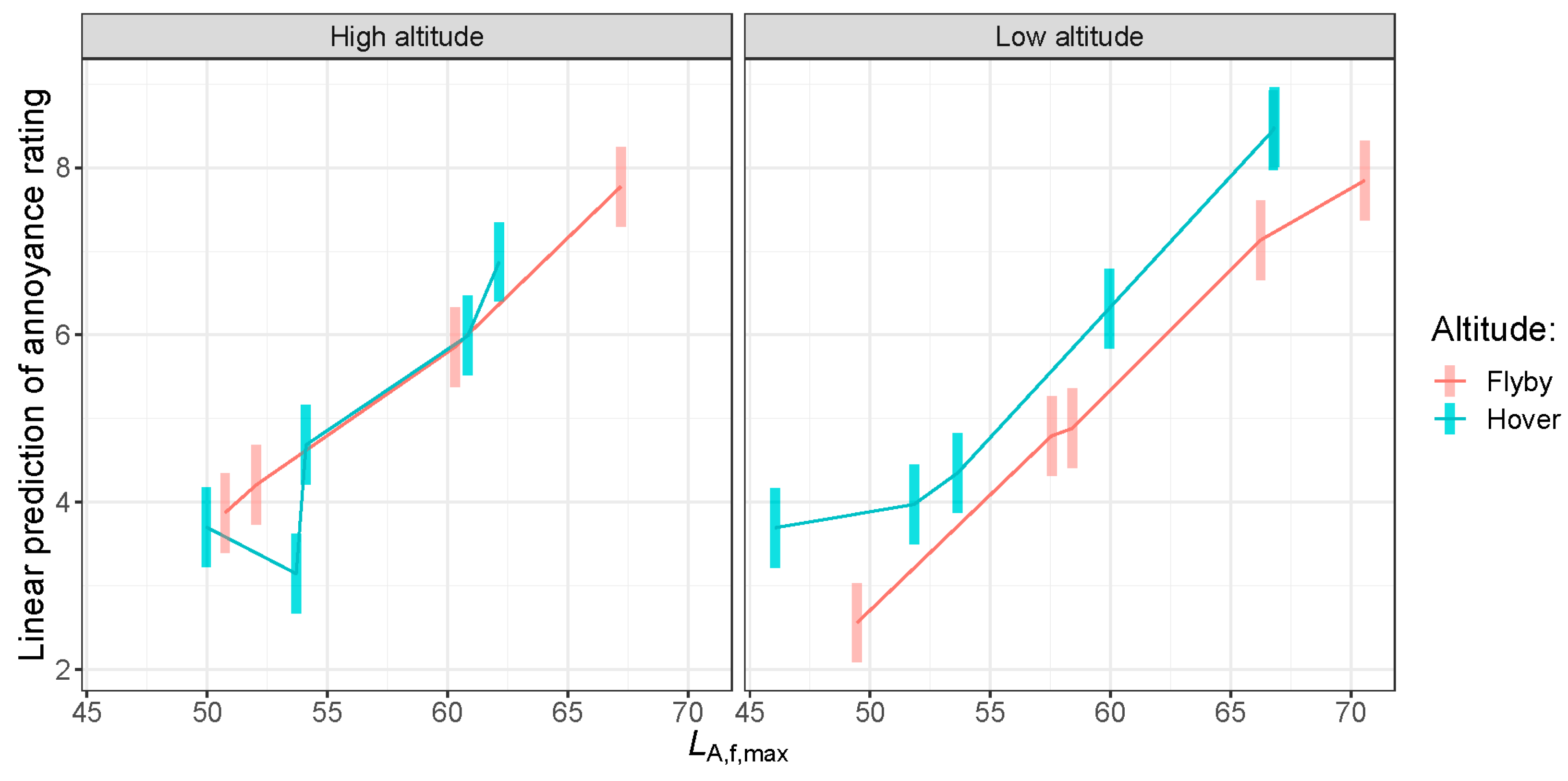
5.4. Effect of LA,f,max on Annoyance Rating
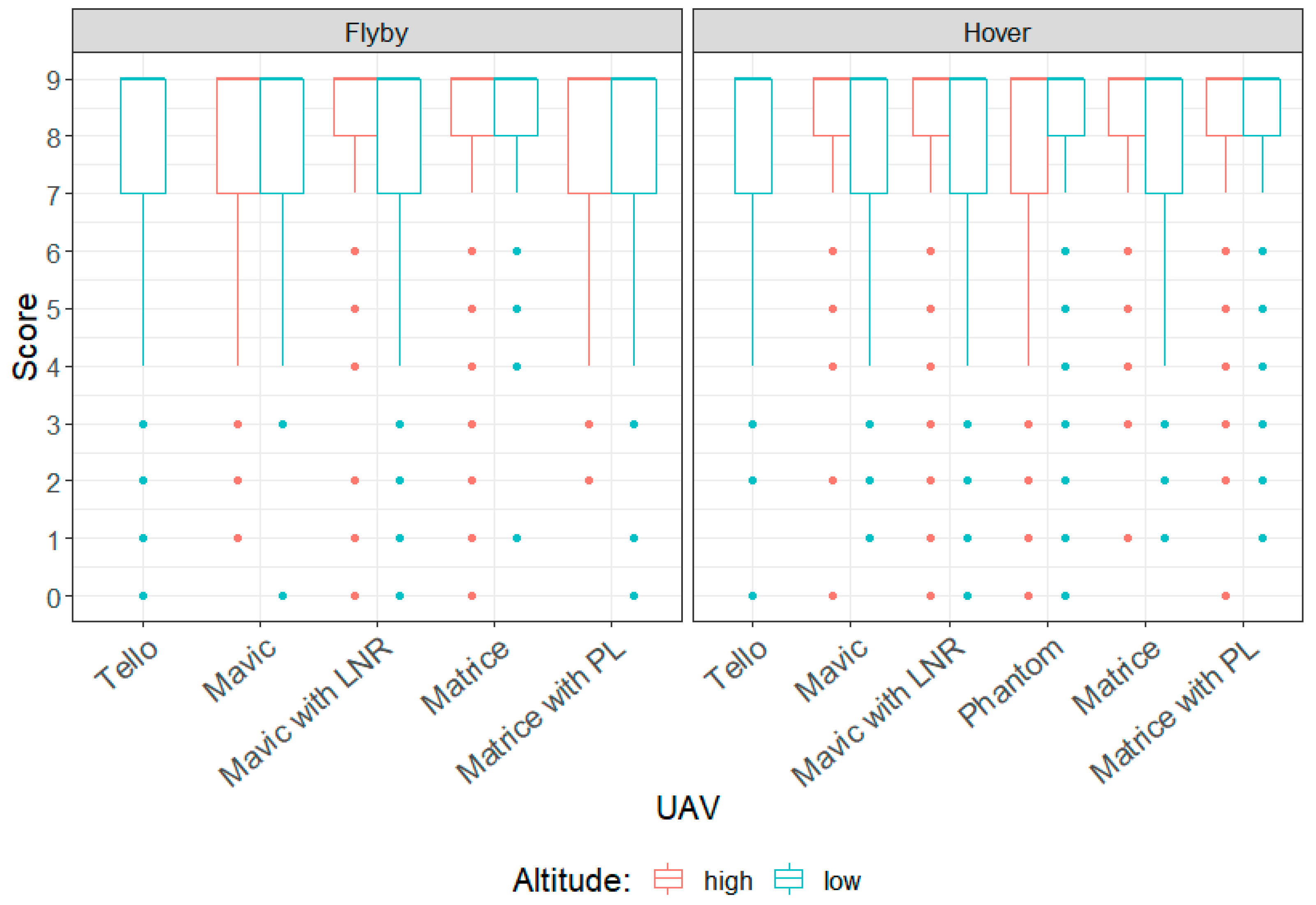
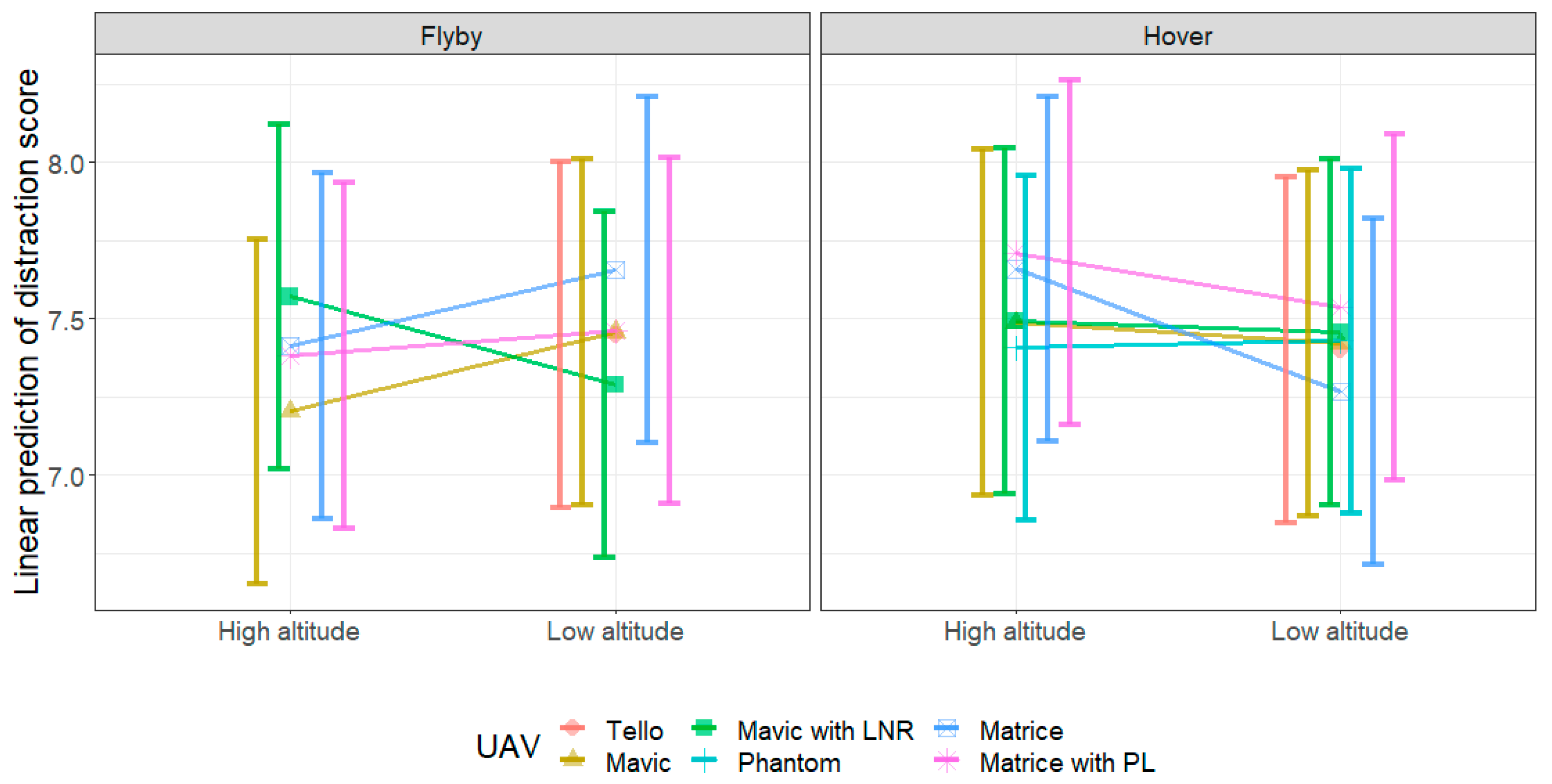
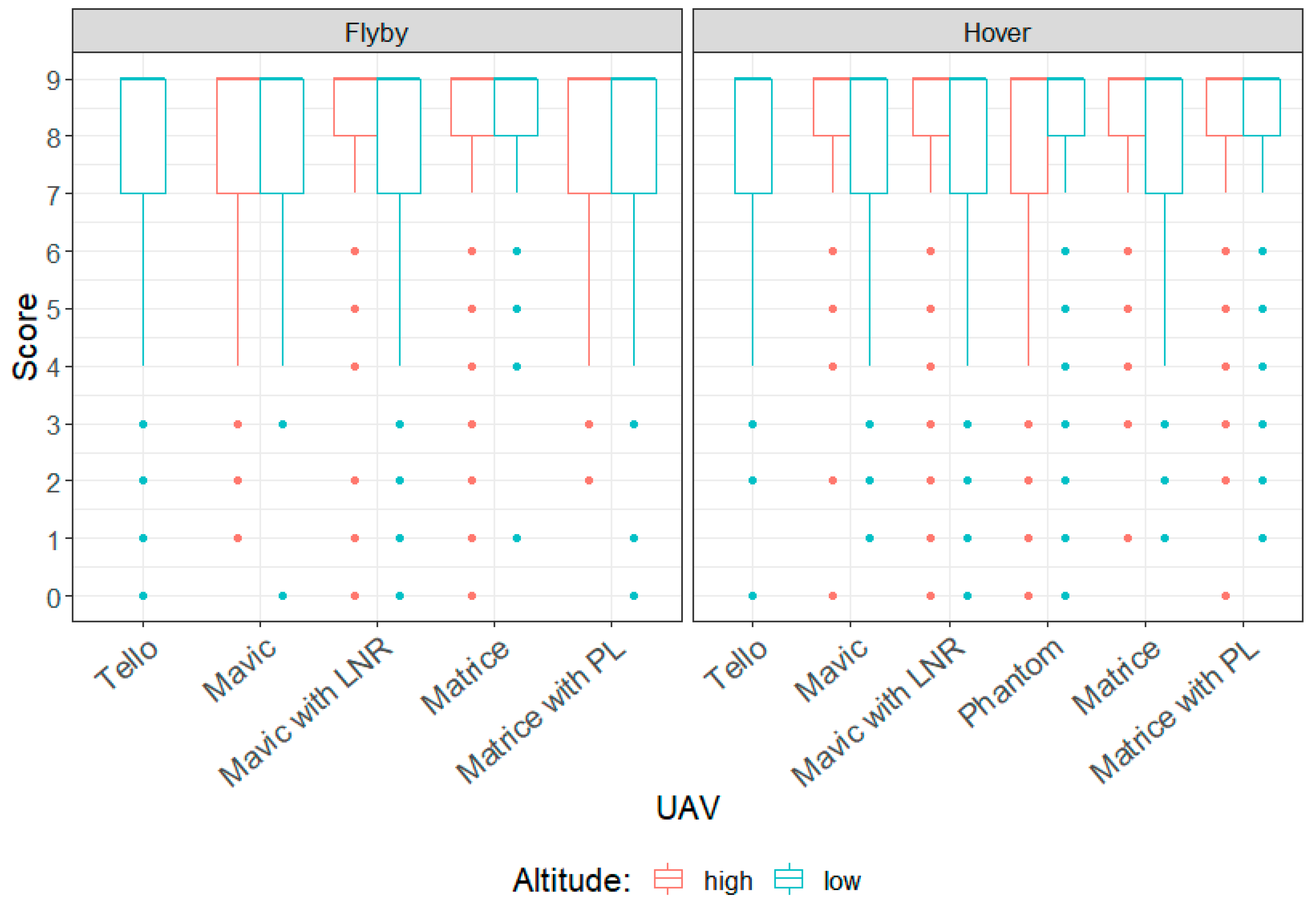
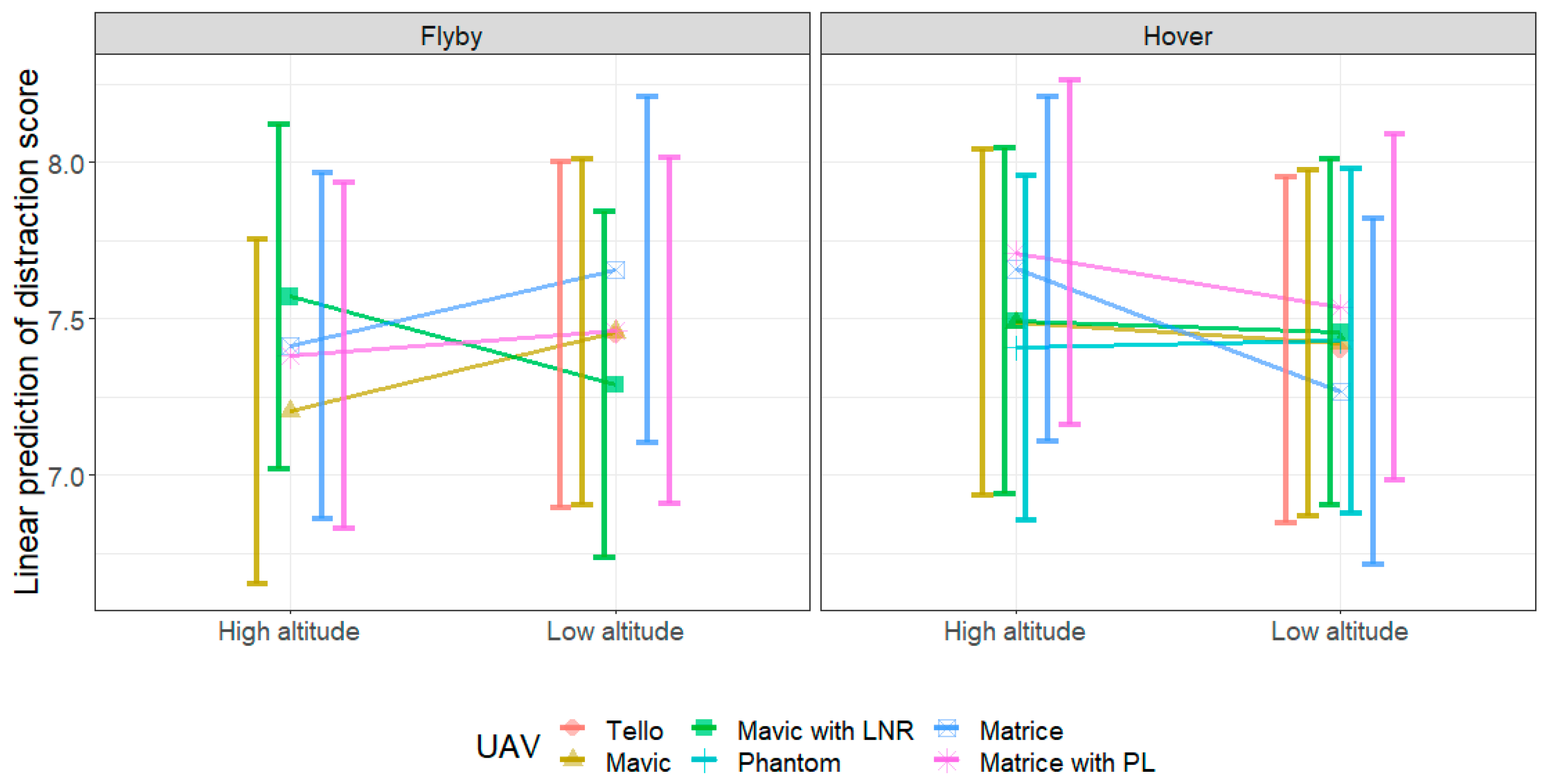
5.5. Cognitive Distraction Test Score Analysis
6. Conclusions and Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tello | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| low flyby–low hover | −1.1351 | 0.162 | 2202 | −7.017 | <0.0001 |
| Mavic | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| high flyby–low flyby | −0.9189 | 0.162 | 2202 | −5.681 | <0.0001 |
| high hover–low hover | −0.8288 | 0.162 | 2202 | −5.124 | <0.0001 |
| high flyby–high hover | 0.7297 | 0.162 | 2202 | 4.511 | <0.0001 |
| low flyby–low hover | 0.8198 | 0.162 | 2202 | 5.068 | <0.0001 |
| Mavic LNR | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| high flyby–low flyby | −0.6757 | 0.162 | 2202 | −4.177 | 0.0002 |
| high hover–low hover | −0.6486 | 0.162 | 2202 | −4.01 | 0.0004 |
| high flyby–high hover | 0.5045 | 0.162 | 2202 | 3.119 | 0.0099 |
| low flyby–low hover | 0.5315 | 0.162 | 2202 | 3.286 | 0.0057 |
| Phantom | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| high hover–low hover | −1.6306 | 0.162 | 2202 | −10.08 | <0.0001 |
| Matrice | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| high flyby–low flyby | −1.2793 | 0.162 | 2202 | −7.908 | <0.0001 |
| high hover–low hover | −2.4955 | 0.162 | 2202 | −15.427 | <0.0001 |
| high flyby–high hover | −0.1351 | 0.162 | 2202 | −0.835 | 0.8376 |
| low flyby–low hover | −1.3514 | 0.162 | 2202 | −8.354 | <0.0001 |
| Matrice PL | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| high flyby–low flyby | −0.0721 | 0.162 | 2202 | −0.446 | 0.9705 |
| high hover–low hover | −1.5766 | 0.162 | 2202 | −9.746 | <0.0001 |
| high flyby–high hover | 0.9009 | 0.162 | 2202 | 5.569 | <0.0001 |
| low flyby–low hover | −0.6036 | 0.162 | 2202 | −3.731 | 0.0011 |
| High-Altitude Flyby | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| Mavic–Mavic with LNR | −0.3333 | 0.162 | 2202 | −2.061 | 0.3086 |
| Mavic–Matrice | −1.982 | 0.162 | 2202 | −12.252 | <0.0001 |
| Mavic–Matrice with PL | −3.9009 | 0.162 | 2202 | −24.115 | <0.0001 |
| Mavic with LNR–Matrice | −1.6486 | 0.162 | 2202 | −10.192 | <0.0001 |
| Mavic with LNR–Matrice with PL | −3.5676 | 0.162 | 2202 | −22.054 | <0.0001 |
| Matrice–Matrice with PL | −1.9189 | 0.162 | 2202 | −11.862 | <0.0001 |
| Low-Altitude Flyby | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| Mavic–Mavic with LNR | −0.0901 | 0.162 | 2202 | −0.557 | 0.9937 |
| Mavic–Matrice | −2.3423 | 0.162 | 2202 | −14.48 | <0.0001 |
| Mavic–Matrice with PL | −3.0541 | 0.162 | 2202 | −18.88 | <0.0001 |
| Mavic–Tello | 2.2342 | 0.162 | 2202 | 13.812 | <0.0001 |
| Mavic with LNR–Matrice | −2.2523 | 0.162 | 2202 | −13.923 | <0.0001 |
| Mavic with LNR–Matrice with PL | −2.964 | 0.162 | 2202 | −18.323 | <0.0001 |
| Mavic with LNR–Tello | 2.3243 | 0.162 | 2202 | 14.369 | <0.0001 |
| Matrice–Matrice with PL | −0.7117 | 0.162 | 2202 | −4.4 | 0.0002 |
| Matrice–Tello | 4.5766 | 0.162 | 2202 | 28.292 | <0.0001 |
| Matrice with PL–Tello | 5.2883 | 0.162 | 2202 | 32.691 | <0.0001 |
| High-Altitude Hover | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| Mavic–Mavic with LNR | −0.5586 | 0.162 | 2202 | −3.453 | 0.0075 |
| Mavic–Phantom | −1.5405 | 0.162 | 2202 | −9.523 | <0.0001 |
| Mavic–Matrice | −2.8468 | 0.162 | 2202 | −17.599 | <0.0001 |
| Mavic–Matrice with PL | −3.7297 | 0.162 | 2202 | −23.057 | <0.0001 |
| Mavic with LNR–Phantom | −0.982 | 0.162 | 2202 | −6.07 | <0.0001 |
| Mavic with LNR–Matrice | −2.2883 | 0.162 | 2202 | −14.146 | <0.0001 |
| Mavic with LNR–Matrice with PL | −3.1712 | 0.162 | 2202 | −19.604 | <0.0001 |
| Phantom–Matrice | −1.3063 | 0.162 | 2202 | −8.075 | <0.0001 |
| Phantom–Matrice with PL | −2.1892 | 0.162 | 2202 | −13.533 | <0.0001 |
| Matrice–Matrice with PL | −0.8829 | 0.162 | 2202 | −5.458 | <0.0001 |
| Low-Altitude Hover | |||||
| Contrast | Estimate | SE | df | t-ratio | p-value |
| Mavic–Mavic with LNR | −0.3784 | 0.162 | 2202 | −2.339 | 0.1789 |
| Mavic–Phantom | −2.3423 | 0.162 | 2202 | −14.48 | <0.0001 |
| Mavic–Matrice | −4.5135 | 0.162 | 2202 | −27.902 | <0.0001 |
| Mavic–Matrice with PL | −4.4775 | 0.162 | 2202 | −27.679 | <0.0001 |
| Mavic–Tello | 0.2793 | 0.162 | 2202 | 1.726 | 0.5143 |
| Mavic with LNR–Phantom | −1.964 | 0.162 | 2202 | −12.141 | <0.0001 |
| Mavic with LNR–Matrice | −4.1351 | 0.162 | 2202 | −25.563 | <0.0001 |
| Mavic with LNR–Matrice with PL | −4.0991 | 0.162 | 2202 | −25.34 | <0.0001 |
| Mavic with LNR–Tello | 0.6577 | 0.162 | 2202 | 4.066 | 0.0007 |
| Phantom–Matrice | −2.1712 | 0.162 | 2202 | −13.422 | <0.0001 |
| Phantom–Matrice with PL | −2.1351 | 0.162 | 2202 | −13.199 | <0.0001 |
| Phantom–Tello | 2.6216 | 0.162 | 2202 | 16.206 | <0.0001 |
| Matrice–Matrice with PL | 0.036 | 0.162 | 2202 | 0.223 | 0.9999 |
| Matrice–Tello | 4.7928 | 0.162 | 2202 | 29.628 | <0.0001 |
| Matrice with PL–Tello | 4.7568 | 0.162 | 2202 | 29.405 | <0.0001 |
| Mavic SE = 0.11, df = 7499 | Mavic with LNR SE = 0.11, df = 7499−7500 | |||||
| Contrast | Estimate | t-ratio | p-value | Estimate | t-ratio | p-value |
| High flyby–low flyby | −0.259 | −2.31 | 0.0959 | 0.287 | 2.581 | 0.0485 |
| Low flyby–low hover | 0.037 | 0.329 | 0.9877 | −0.172 | −1.542 | 0.4124 |
| High flyby–high hover | −0.289 | −2.59 | 0.0473 | 0.078 | 0.702 | 0.8964 |
| High hover–low hover | 0.067 | 0.603 | 0.9312 | 0.038 | 0.34 | 0.9865 |
| Matrice SE = 0.11, df = 7499–7500 | Matrice with PL SE = 0.11, df = 7499 | |||||
| Contrast | Estimate | t-ratio | p-value | Estimate | t-ratio | p-value |
| High flyby–low flyby | −0.248 | −2.218 | 0.1185 | −0.081 | −0.722 | 0.8885 |
| Low flyby–low hover | 0.397 | 3.563 | 0.0021 | −0.077 | −0.692 | 0.9001 |
| High flyby–high hover | −0.250 | −2.244 | 0.1116 | −0.336 | −3.009 | 0.014 |
| High hover–low hover | 0.399 | 3.598 | 0.0018 | 0.178 | 1.599 | 0.3792 |
| Phantom SE = 0.11, df = 7499 | Tello SE = 0.11, df = 7499 | |||||
| Contrast | Estimate | t-ratio | p-value | Estimate | t-ratio | p-value |
| Low flyby–low hover | n/a | n/a | n/a | 0.052 | 0.463 | 0.9671 |
| High hover–low hover | −0.023 | −0.204 | 0.997 | n/a | n/a | n/a |
| Low, Hover | Low, Flyby | |||||
| Contrast | Estimate | t-ratio | p-value | Estimate | t-ratio | p-value |
| Mavic–Mavic with LNR | −0.03521 | −0.317 | 0.9996 | 0.17312 | 1.55 | 0.6317 |
| Mavic–Phantom | −0.00755 | −0.068 | 1 | n/a | n/a | n/a |
| Mavic–Matrice | 0.15791 | 1.422 | 0.7138 | −0.20188 | −1.808 | 0.4608 |
| Mavic–Matrice with PL | −0.11671 | −1.05 | 0.9008 | −0.0027 | −0.024 | 1 |
| Mavic–Tello | 0.02299 | 0.207 | 0.9999 | 0.00809 | 0.072 | 1 |
| Mavic with LNR–Phantom | 0.02766 | 0.25 | 0.9999 | n/a | n/a | n/a |
| Mavic with LNR–Matrice | 0.19312 | 1.74 | 0.5052 | −0.375 | −3.37 | 0.0098 |
| Mavic with LNR–Matrice with PL | −0.0815 | −0.734 | 0.9778 | −0.17581 | −1.574 | 0.6157 |
| Mavic with LNR–Tello | 0.0582 | 0.524 | 0.9952 | −0.16503 | −1.478 | 0.6787 |
| Phantom–Matrice | 0.16546 | 1.494 | 0.6684 | n/a | n/a | n/a |
| Phantom–Matrice with PL | −0.10916 | −0.985 | 0.9229 | n/a | n/a | n/a |
| Phantom–Tello | 0.03054 | 0.276 | 0.9998 | n/a | n/a | n/a |
| Matrice–Matrice with PL | −0.27462 | −2.473 | 0.1324 | 0.19919 | 1.783 | 0.4766 |
| Matrice–Tello | −0.13492 | −1.216 | 0.8294 | 0.20997 | 1.88 | 0.4146 |
| MatricePL–Tello | 0.1397 | 1.258 | 0.8079 | 0.01078 | 0.096 | 1 |
| High, Hover | High, Flyby | |||||
| Contrast | Estimate | t-ratio | p-value | Estimate | t-ratio | p-value |
| Mavic–Mavic with LNR | −0.0059 | −0.053 | 1 | −0.37287 | −3.339 | 0.0109 |
| Mavic–Phantom | 0.08201 | 0.739 | 0.9771 | n/a | n/a | n/a |
| Mavic–Matrice | −0.174 | −1.57 | 0.6187 | −0.21294 | −1.901 | 0.4017 |
| Mavic–Matrice with PL | −0.22747 | −2.048 | 0.3152 | −0.18059 | −1.612 | 0.5906 |
| Mavic with LNR–Phantom | 0.08791 | 0.793 | 0.9688 | n/a | n/a | n/a |
| Mavic with LNR–Matrice | −0.16811 | −1.518 | 0.6523 | 0.15994 | 1.432 | 0.7075 |
| Mavic with LNR–Matrice with PL | −0.22157 | −1.998 | 0.3437 | 0.19228 | 1.722 | 0.5174 |
| Phantom–Matrice | −0.25602 | −2.31 | 0.1902 | n/a | n/a | n/a |
| Phantom–Matrice with PL | −0.30948 | −2.786 | 0.0597 | n/a | n/a | n/a |
| Matrice–Matrice with PL | −0.05347 | −0.482 | 0.9968 | 0.03234 | 0.289 | 0.9997 |
References
- Torija, A.J.; Clark, C. A psychoacoustic approach to building knowledge about human response to noise of unmanned aerial vehicles. Int. J. Environ. Res. Public Health 2021, 18, 682. [Google Scholar] [CrossRef]
- Mahony, R.; Kumar, V. Aerial Robotics and the Quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 19. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Elsayed, M.; Mohamed, M. The impact of airspace regulations on unmanned aerial vehicles in last-mile operation. Transp. Res. Part D Transp. Environ. 2020, 87, 102480. [Google Scholar] [CrossRef]
- Christian, A.W.; Cabell, R. Initial investigation into the psychoacoustic properties of small unmanned aerial system noise. In Proceedings of the AIAA Aviation Technology, Integration and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Torija, A.J.; Li, Z.; Self, R.H. Effects of a hovering unmanned aerial vehicle on urban soundscapes perception. Transp. Res. Part D Transp. Environ. 2020, 78, 102195. [Google Scholar] [CrossRef]
- Cabell, R.; Grosveld, F.; McSwain, R. Measured noise from small unmanned aerial vehicles. In Proceedings of the Inter-Noise and Noise-Con Congress and Conference Proceedings, Providence, RI, USA, 13–15 June 2016; pp. 345–354. [Google Scholar]
- Zhou, T.; Jiang, H.; Sun, Y.; Fattah, R.J.; Zhang, X.; Huang, B.; Cheng, L. Acoustic characteristics of a quad-copter under realistic flight conditions. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019; pp. 2019–2587. [Google Scholar] [CrossRef]
- Alexander, W.N.; Whelchel, J.; Intaratep, N.; Trani, A. Predicting community noise of sUAS. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar] [CrossRef]
- Alexander, W.N.; Whelchel, J. Flyover noise of multi-rotor sUAS. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Madrid, Spain, 16–19 June 2019; Volome 259, pp. 2548–2558. [Google Scholar]
- Whelchel, J.; Alexander, W.N.; Intaratep, N. Propeller Noise in Confined Anechoic and Open Environments. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Intaratep, N.; Alexander, W.N.; Devenport, W.J. Experimental study of quadcopter acoustics and performance at static thrust conditions. In Proceedings of the 22nd AIAA/CEAS Aeroacoustics Conference, Lyon, France, 30 May–1 June 2016. [Google Scholar]
- Tinney, C.E.; Sirohi, J. Multirotor UAV noise at static thrust. AIAA J. 2018, 57, 2816–2826. [Google Scholar] [CrossRef]
- Zawodny, N.S.; Boyd, D.D., Jr. Investigation of rotor-airframe interaction noise associated with small-scale rotary-wing unmanned aircraft systems. In Proceedings of the 73rd American Helicopter Society (AHS) Annual Forum, Fort Worth, TX, USA, 9–11 May 2017. [Google Scholar] [CrossRef] [Green Version]
- McKay, R.S.; Kingan, M.J.; Go, S.T.; Jung, R. Experimental and analytical investigation of contra-rotating multi-rotor UAV propeller noise. Appl. Acoust. 2021, 177, 107850. [Google Scholar] [CrossRef]
- Fattah, R.; Chen, W.; Wu, H.; Wu, Y.; Zhang, X. Noise measurements of generic small-scale propellers. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar]
- Zawodny, N.S.; Boyd, D.D., Jr.; Burley, C.L. Acoustic characterization and prediction of representative, small-scale rotary-wing unmanned aircraft system components. In Proceedings of the 72nd American Helicopter Society (AHS) Annual Forum, West Palm Beach, FL, USA, 17–19 May 2016. [Google Scholar]
- Yang, Y.; Liu, Y.; Li, Y.; Arcondoulis, E.; Wang, Y. Aerodynamic and aeroacoustic performance of an isolated multicopter rotor during forward flight. AIAA J. 2020, 58, 1171–1181. [Google Scholar] [CrossRef]
- Zawodny, N.; Pettingill, N. Acoustic wind tunnel measurements of a quadcopter in hover and forward flight conditions. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Chicago, IL, USA, 26–29 August 2018. [Google Scholar]
- Lee, H.; Lee, D.-J. Rotor interactional effects on aerodynamic and noise characteristics of a small multirotor unmanned aerial vehicle. Phys. Fluids 2020, 32, 047107. [Google Scholar] [CrossRef] [Green Version]
- Nardari, C.; Casalino, D.; Polidoro, F.; Coralic, V.; Lew, P.-T.; Brodie, J. Numerical and Experimental Investigation of Flow Confinement Effects on UAV Rotor Noise. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019; pp. 2019–2497. [Google Scholar] [CrossRef]
- Robison, R.A.; Peake, N. Noise generation by turbulence–propeller interaction in asymmetric flow. J. Fluid Mech. 2014, 758, 121–149. [Google Scholar] [CrossRef] [Green Version]
- Stephenson, J.H.; Weitsman, D.; Zawodny, N.S. Effects of flow recirculation on unmanned aircraft system (UAS) acoustic measurements in closed anechoic chambers. J. Acoust. Soc. Am. 2019, 145, 1153–1155. [Google Scholar] [CrossRef] [PubMed]
- Weitsman, D.; Stephenson, J.H.; Zawodny, N.S. Effects of flow recirculation on acoustic and dynamic measurements of rotary-wing systems operating in closed anechoic chambers. J. Acoust. Soc. Am. 2020, 148, 1325. [Google Scholar] [CrossRef] [PubMed]
- McKay, R.S.; Kingan, M.J. Multirotor Unmanned Aerial System Propeller Noise Caused by Unsteady Blade Motion. In Proceedings of the 25th AIAA/CEAS Aeroacoustics Conference, Delft, The Netherlands, 20–23 May 2019. [Google Scholar] [CrossRef]
- Huff, D.L.; Henderson, B.S. Electric motor noise for small quadcopters: Part 1–Acoustic Measurements. In Proceedings of the 2018 AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 25–29 June 2018; pp. 2018–2952. [Google Scholar]
- Henderson, B.S.; Huff, D. Electric motor noise for small quadcopters: Part II—Source characteristics and predictions. In Proceedings of the AIAA/CEAS Aeroacoustics Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- McKay, R.S.; Kingan, M.J. Multi-rotor unmanned aerial system noise: Quantifying the motor’s contribution. In Proceedings of the Conference of the Acoustical Society of New Zealand, Auckland, New Zealand, 12–14 November 2018. [Google Scholar]
- Senzig, D.A.; Marsan, M.; Downs, R.S.; Hastings, A.L.; Cutler, C.J.; Samiljan, R.W. UAS Noise Certification and Measurements Status Report; USA Department of Transportation Report No. DOT-VNTSC-FAA-18-01; USA Department of Transportation: Washington, DC, USA, 2017.
- Torija, A.J.; Self, R.H.; Lawrence, J.L. Psychoacoustic Characterisation of a Small Fixed-Pitch Quadcopter. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise19, Madrid, Spain, 16–19 June 2019; Institute of Noise Control Engineering: Madrid, Spain, 2019; pp. 1884–1894. [Google Scholar]
- Zwicker, E.; Fastl, H. Psychoacoustics: Facts and Models; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Di, G.-Q.; Chen, X.-W.; Song, K.; Zhou, B.; Pei, C.-M. Improvement of Zwicker’s psychoacoustic annoyance model aiming at tonal noises. Appl. Acoust. 2016, 105, 164–170. [Google Scholar] [CrossRef]
- More, S.R. Aircraft Noise Characteristics and Metrics. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2010. [Google Scholar]
- Gwak, D.Y.; Han, D.; Lee, S. Sound quality factors influencing annoyance from hovering UAV. J. Sound Vib. 2020, 489, 115651. [Google Scholar] [CrossRef]
- Torija, A.J.; Li, Z. Metrics for Assessing the Perception of UAV Noise. In Proceedings of the E-Forum Acusticum 2020, Lyon, France, 7–11 December 2020; European Acoustics Association (EAA): Lyon, France, 2020. [Google Scholar]
- Torija, A.J.; Chaitanya, P.; Li, Z. Psychoacoustic analysis of contra-rotating propeller noise for unmanned aerial vehicles. J. Acoustic. Soc. Am. 2021, 149, 835. [Google Scholar] [CrossRef] [PubMed]
- Torija, A.J.; Roberts, S.; Woodward, R.; Flindell, I.H.; McKenzie, A.R.; Self, R.H. On the assessment of subjective response to tonal content of contemporary aircraft noise. Appl. Acoust. 2019, 146, 190–203. [Google Scholar] [CrossRef] [Green Version]
- McAlpine, A.; Schwaller, P.J.G.; Fisher, M.J.; Tester, B.J. Buzz-saw noise: Prediction of the rotor-alone pressure field. J. Sound Vib. 2012, 331, 4901–4918. [Google Scholar] [CrossRef]
- Rizzi, S.A.; Palumbo, D.L.; Rathsam, J.; Christian, A. Annoyance to noise produced by a distributed electric propulsion high-lift system. In Proceedings of the 23rd AIAA/CEAS Aeroacoustics Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Read, D.R.; Roof, C. Research to Support New Entrants to Public Airspace and Aircraft Noise Certification. In Proceedings of the Quiet Drones, an International E-Symposium on UAV/UAS Noise, Paris, France, 19–21 October 2020. [Google Scholar]
- USA Federal Government. Code of Federal Regulations, Title 14, Part. 36; Federal Register: Washington, DC, USA, 2017.
- Senzig, D.; Marsan, M. UAS Noise Certification. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Chicago, IL, USA, 26–29 August 2018; Volume 258, pp. 3718–3726. [Google Scholar]
- USA Federal Government. Code of Federal Regulations, Title 14, Part. 107; Federal Register: Washington, DC, USA, 2018.
- Hellweg, R.D. ANSI/ASA Standards activity on measurement of UAS noise. In Proceedings of the Quiet Drones, an International E-Symposium on UAV/UAS Noise, Paris, France, 19–21 October 2020. [Google Scholar]
- European Commission. Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on Unmanned Aircraft Systems and on Third-Country Operators of Unmanned Aircraft Systems; European Commission: Brussel, Belgium, 2019. [Google Scholar]
- Wieland, M.; Liebsch, R.; Vyshnevskyy, M. Noise Requirements of Unmanned Aircraft due to European Regulation 2019/945. In Proceedings of the QUIET UAVS, International E-Symposium on UAV/UAS Noise, Paris, France, 19–21 October 2020; International Institute of Noise Control Engineering: Paris, France, 2020; pp. 484–491. [Google Scholar]
- ISO 532-1:2017(E). Acoustics–Methods for Calculating Loudness–Part 1: Zwicker Method; International Organization for Standardization: Geneva, Switzerland, 2017. [Google Scholar]
- DIN 45692. Measurement Technique for the Simulation of the Auditory Sensation of Sharpness; German Institute for Standardization: Berlin, Germany, 2009. [Google Scholar]
- McCormack, L. Spatial Audio Real-time Applications (SPARTA). 2020. Available online: http://research.spa.aalto.fi/projects/sparta{_}vsts/ (accessed on 1 April 2021).
- McCormack, L.; Delikaris-Manias, S.; Farina, A.; Pinardi, D.; Pulkki, V. Real-time conversion of sensor array signals into spherical harmonic signals with applications to spatially localised sub-band sound-field analysis. In Proceedings of the 144th Audio Engineering Society Convention, Milan, Italy, 23–26 May 2018. [Google Scholar]
- Au, E.; Xiao, S.; Hui, C.T.; Hioka, Y.; Masuda, H.; Watson, C.I. Speech intelligibility in noise with varying spatial acoustics under Ambisonics-based sound reproduction system. Appl. Acoust. 2021, 174, 107707. [Google Scholar] [CrossRef]
- Fields, J.M.; de Jong, R.G.; Gjestland, T.; Flindell, I.H.; Job, R.F.; Kurra, S.; Lercher, P.; Vallet, M.; Yano, T.; Guski, R.; et al. Standardized general-purpose noise reaction questions for community noise surveys: Research and a recommendation. J. Sound Vib. 2001, 242, 641–679. [Google Scholar] [CrossRef] [Green Version]
- Haberlandt, A. Serial Recall. In Encyclopedia of Clinical Neuropsychology; Kreutzer, J., DeLuca, J., Caplan, B., Eds.; Springer: New York, NY, USA, 2011. [Google Scholar]
- Hioka, Y.; James, J.; Watson, C.I. Masker design for real-time informational masking with mitigated annoyance. Appl. Acoust. 2020, 159, 107073. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing. 2015. Available online: https://www.r-project.org/ (accessed on 1 April 2021).
- Bates, D.; Machler, M.; Bolker, B.; Walker, S. Fitting linear mixed-effects models using lme4. J. Stat. Softw. 2015, 67, 1–48. [Google Scholar] [CrossRef]
- Kuznetsova, A.; Brockhoff, B.; Christensen, R.H.B. lmerTest package: Tests in linear mixed effects models. J. Stat. Softw. 2017, 82. [Google Scholar] [CrossRef] [Green Version]
- Lenth, R. Emmeans: Estimated Marginal Means, Aka Least-Squares Means. 2019. Available online: https://cran.r-project.org/package=emmeans (accessed on 1 April 2021).
- Harrell, F. Hmisc: Harrell Miscellaneous. 2021. Available online: https://cran.r-project.org/package=Hmisc (accessed on 1 April 2021).
- Dittrich, K.; Oberfeld, D. A Comparison of the Temporal Weighting of Annoyance and Loudness. J. Acoust. Soc. Am. 2009, 126, 3168–3178. [Google Scholar] [CrossRef]
- Kenji, F. A Logistic Prediction Model for Individual Allowable Noise Levels. J. Acoust. Soc. Am. 2008, 124, 3544–3560. [Google Scholar] [CrossRef]

| No. | UAV | Flight Condition | Height of UAV | No. | UAV | Flight Condition | Height of UAV |
|---|---|---|---|---|---|---|---|
| 1 | Tello | SLF | 10 m | 11 | Phantom | Hover | 10 m |
| 2 | Tello | Hover | 10 m | 12 | Phantom | Hover | 27 m |
| 3 | Mavic | SLF | 10 m | 13 | Matrice | SLF | 10 m |
| 4 | Mavic | SLF | 30 m | 14 | Matrice | SLF | 30 m |
| 5 | Mavic | Hover | 10 m | 15 | Matrice | Hover | 10 m |
| 6 | Mavic | Hover | 30 m | 16 | Matrice | Hover | 30 m |
| 7 | Mavic with LNR | SLF | 10 m | 17 | Matrice with PL | SLF | 10 m |
| 8 | Mavic with LNR | SLF | 30 m | 18 | Matrice with PL | SLF | 30 m |
| 9 | Mavic with LNR | Hover | 10 m | 19 | Matrice with PL | Hover | 10 m |
| 10 | Mavic with LNR | Hover | 30 m | 20 | Matrice with PL | Hover | 30 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hui, C.T.J.; Kingan, M.J.; Hioka, Y.; Schmid, G.; Dodd, G.; Dirks, K.N.; Edlin, S.; Mascarenhas, S.; Shim, Y.-M. Quantification of the Psychoacoustic Effect of Noise from Small Unmanned Aerial Vehicles. Int. J. Environ. Res. Public Health 2021, 18, 8893. https://doi.org/10.3390/ijerph18178893
Hui CTJ, Kingan MJ, Hioka Y, Schmid G, Dodd G, Dirks KN, Edlin S, Mascarenhas S, Shim Y-M. Quantification of the Psychoacoustic Effect of Noise from Small Unmanned Aerial Vehicles. International Journal of Environmental Research and Public Health. 2021; 18(17):8893. https://doi.org/10.3390/ijerph18178893
Chicago/Turabian StyleHui, C. T. Justine, Michael J. Kingan, Yusuke Hioka, Gian Schmid, George Dodd, Kim N. Dirks, Shaun Edlin, Sean Mascarenhas, and Young-Min Shim. 2021. "Quantification of the Psychoacoustic Effect of Noise from Small Unmanned Aerial Vehicles" International Journal of Environmental Research and Public Health 18, no. 17: 8893. https://doi.org/10.3390/ijerph18178893
APA StyleHui, C. T. J., Kingan, M. J., Hioka, Y., Schmid, G., Dodd, G., Dirks, K. N., Edlin, S., Mascarenhas, S., & Shim, Y.-M. (2021). Quantification of the Psychoacoustic Effect of Noise from Small Unmanned Aerial Vehicles. International Journal of Environmental Research and Public Health, 18(17), 8893. https://doi.org/10.3390/ijerph18178893