
Residual Self-Calibration and Self-Attention Aggregation Network for Crop Disease Recognition

Abstract
:1. Introduction
- A residual self-calibration and self-attention aggregation network is proposed for crop disease recognition in actual scenarios. For the problem of crop disease recognition in actual scenarios, the proposed RCAA-Net can achieve a double improvement of accuracy and robustness.
- A feedback self-calibration module is proposed to further suppress the background noise in the original deep features by fine filtering and adjusting the network features again, thereby effectively improving the robustness of the model.
- A self-attention aggregation module is proposed to automatically focus on discriminative regions by capturing multi-scale information in different semantic spaces, thereby further improving the robustness and accuracy of the model.
2. Related Work
2.1. Traditional Image Processing Methods
2.2. Deep Neural Network Methods
3. Methods
3.1. Overview
3.2. Multi-Scale Residual Module
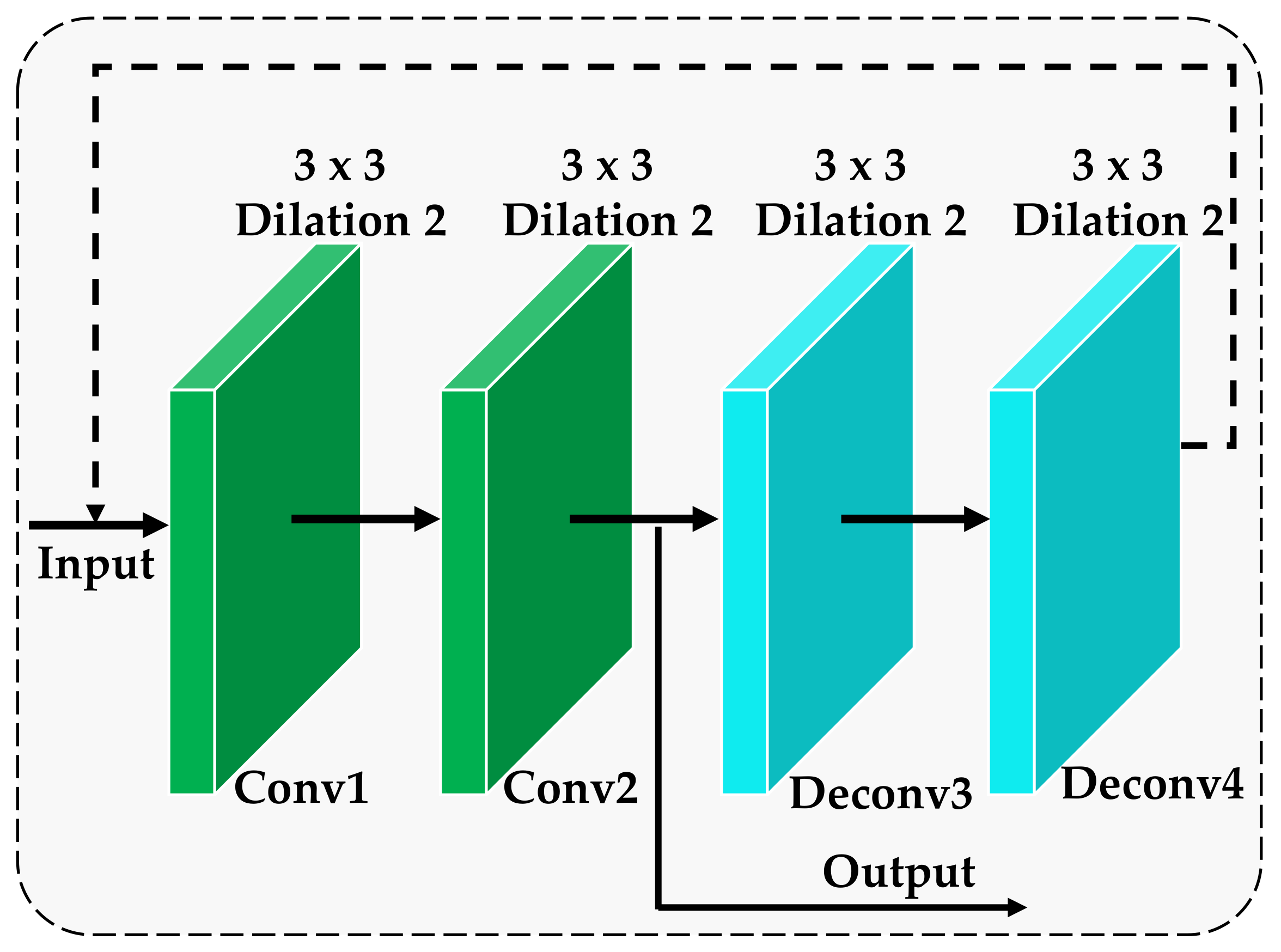
3.3. Feedback Self-Calibration Module
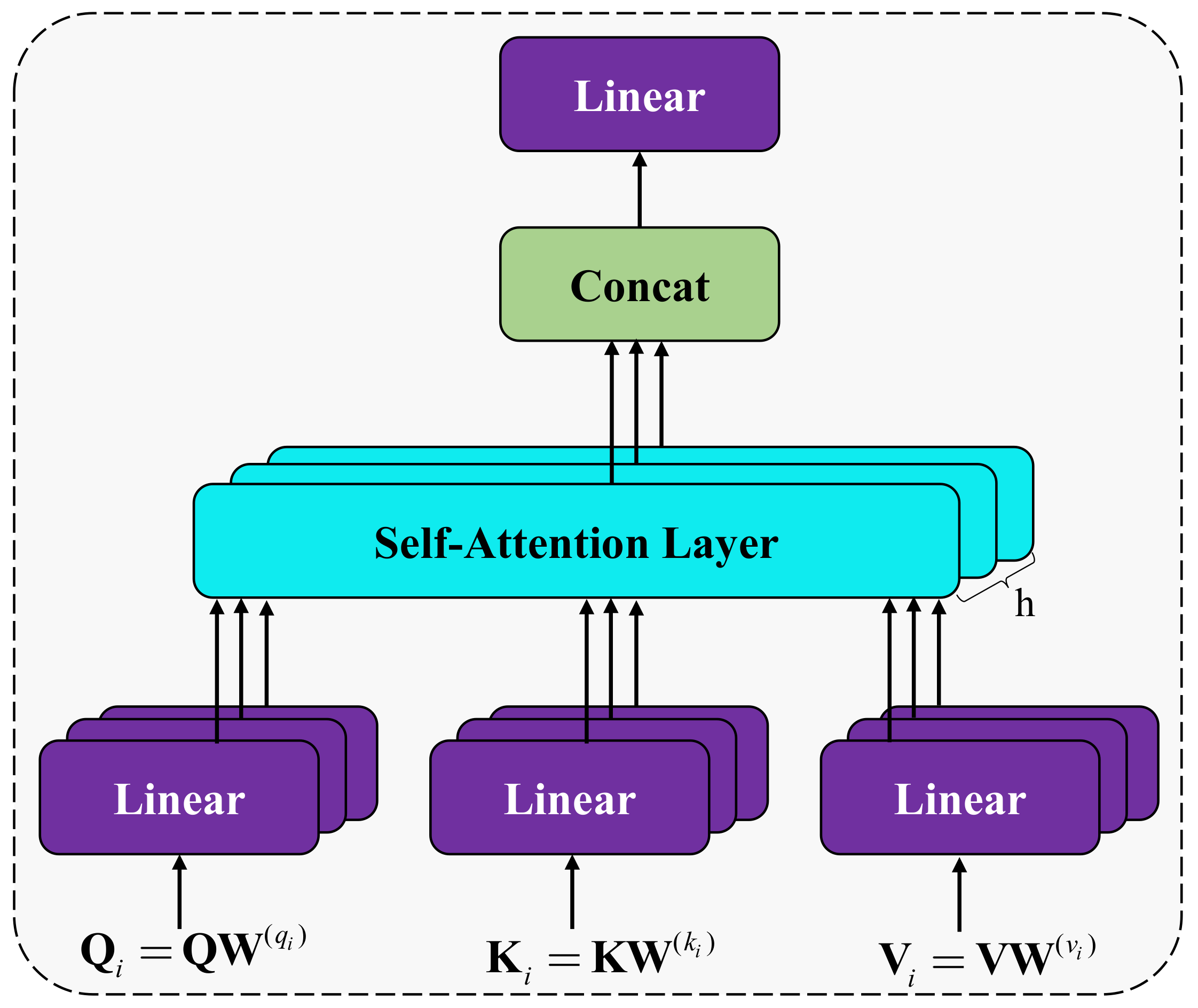
3.4. Self-Attention Aggregation Module
- (1)
- Firstly, the and matrices are mapped into multiple subspaces:where , , and are the query, key and value matrix of each subspace. , and are conversion matrices.
- (2)
- Secondly, the scaled dot-product attention in each subspace is calculated in parallel, and then the results are concatenated to obtain the context matrix after linear transformation:where is the scaled dot-product attention of each subspace, and MultiHead is the final result.
3.5. Network Parameters and Loss Function
4. Experiment
4.1. Experiment Setup
4.1.1. Dataset
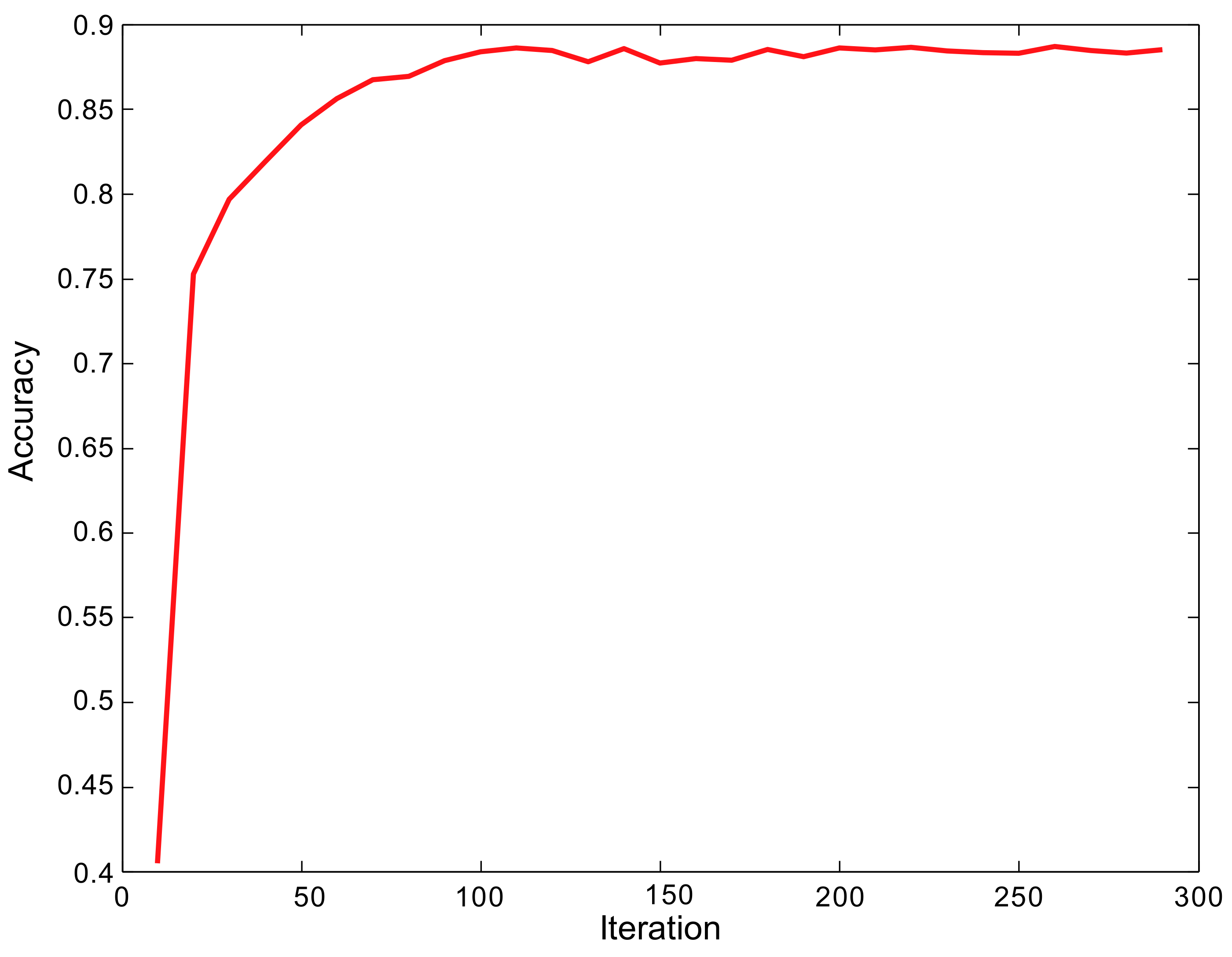
4.1.2. Implementation Details
4.1.3. Comparison Methods
4.2. Comparison with State-of-the-Art Methods
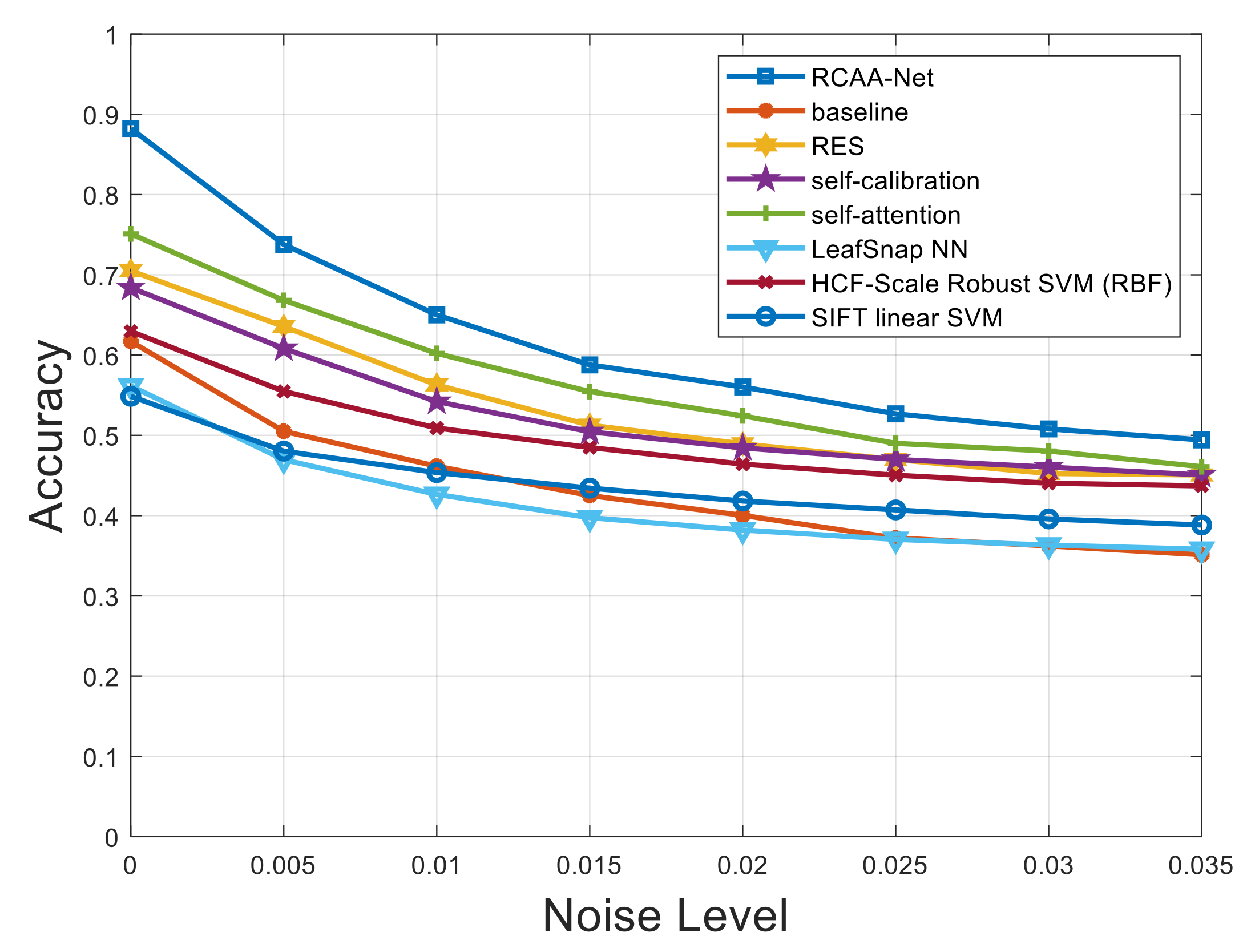
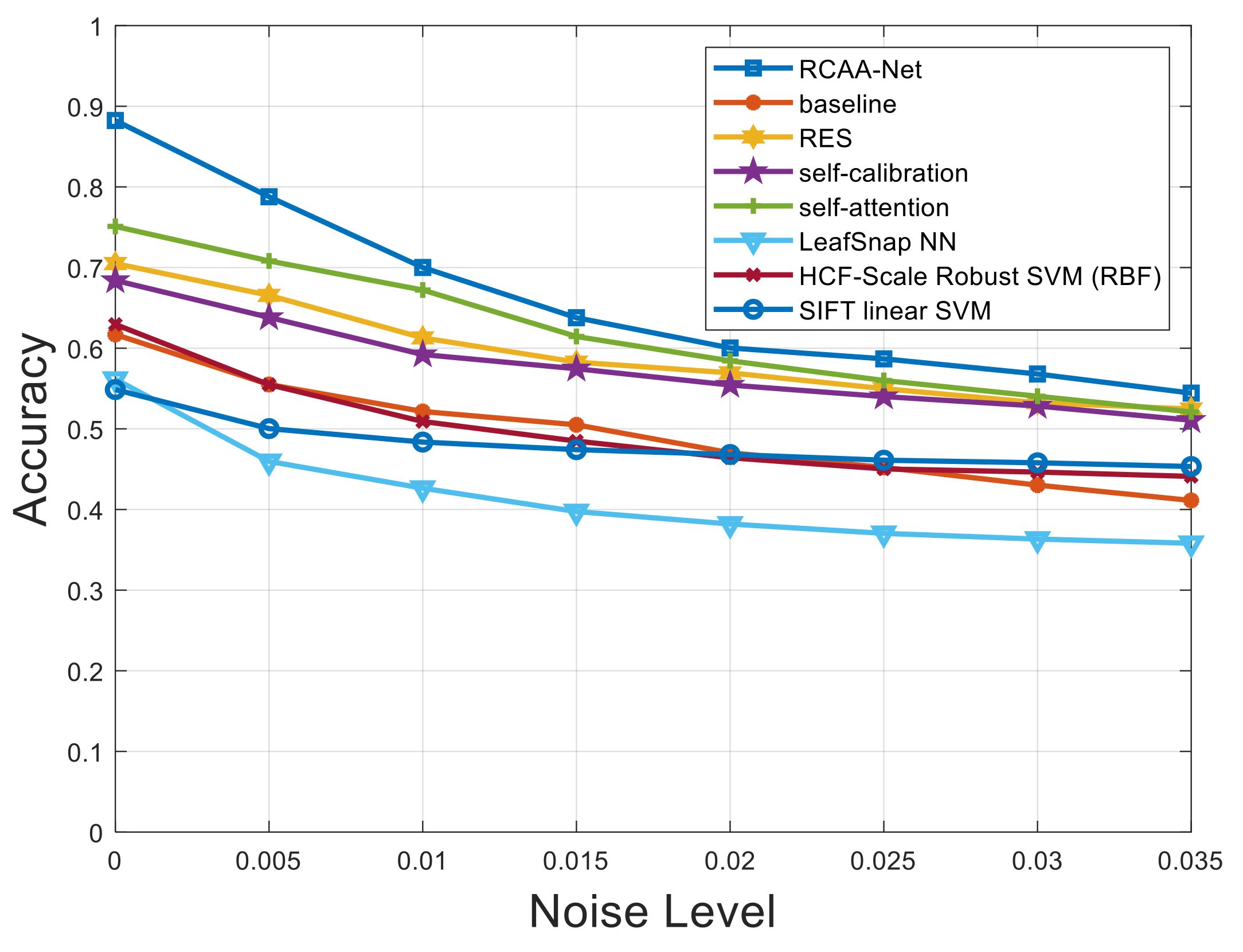
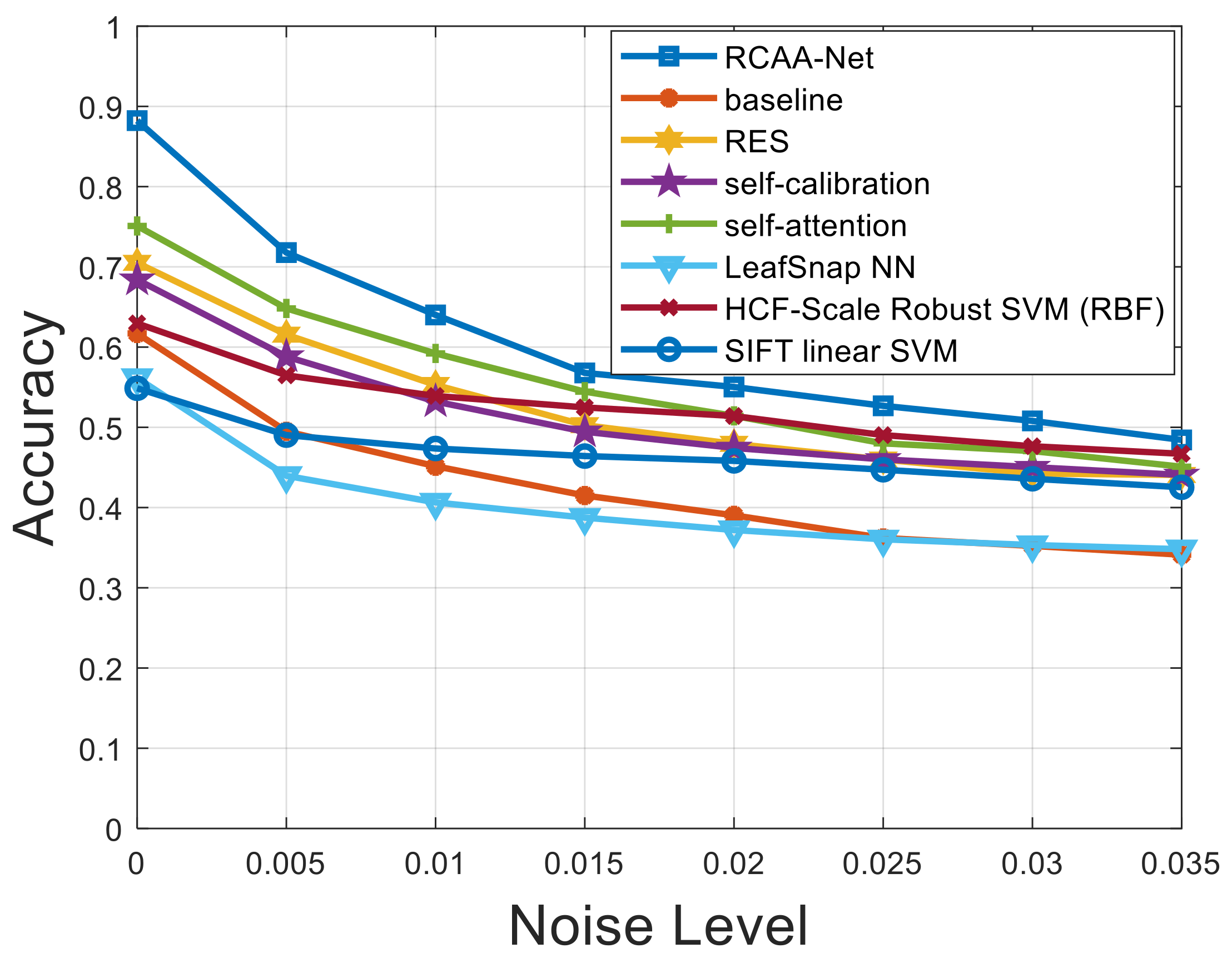
4.3. The Discussion under Different Noise Conditions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, H.; Kang, Z.; Li, X.; Li, Y.; Li, Y.; Wang, S.; Liu, D. Identification of Wheat Leaf Rust Resistance Genes in Chinese Wheat Cultivars and the Improved Germplasms. Plant Dis. 2020, 104, 2669–2680. [Google Scholar] [CrossRef] [PubMed]
- Boulent, J.; Foucher, S.; Théau, J.; St-Charles, P.L. Convolutional neural networks for the automatic identification of plant diseases. Front. Plant Sci. 2019, 10, 941. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, X.; Liu, J.; Zhu, X. Early real-time detection algorithm of tomato diseases and pests in the natural environment. Plant Methods 2021, 17, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Hughes, D.; Salathé, M. An open access repository of images on plant health to enable the development of mobile disease diagnostics. arXiv 2015, arXiv:1511.08060. [Google Scholar]
- Guettari, N.; Capelle-Laizé, A.S.; Carré, P. Blind image steganalysis based on evidential k-nearest neighbors. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 2742–2746. [Google Scholar]
- Deepa, S.; Umarani, R. Steganalysis on Images using SVM with Selected Hybrid Features of Gini Index Feature Selection Algorithm. Int. J. Adv. Res. Comput. Sci. 2017, 8, 1503–1509. [Google Scholar]
- Ramezani, M.; Ghaemmaghami, S. Towards genetic feature selection in image steganalysis. In Proceedings of the 2010 7th IEEE Consumer Communications and Networking Conference, Las Vegas, NV, USA, 9–12 January 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–4. [Google Scholar]
- Sheikhan, M.; Pezhmanpour, M.; Moin, M. Improved contourlet-based steganalysis using binary ppaper swarm optimization and radial basis neural networks. Neural Comput. Appl. 2012, 21, 1717–1728. [Google Scholar] [CrossRef]
- Kodovsky, J.; Fridrich, J.; Holub, V. Ensemble classifiers for steganalysis of digital media. IEEE Trans. Inf. Forensics Secur. 2011, 7, 432–444. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Hastie, T.; Tibshirani, R. Regularized linear discriminant analysis and its application in microarrays. Biostatistics 2007, 8, 86–100. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, S.; Wang, Z. Cucumber disease recognition based on global-local singular value decomposition. Neurocomputing 2016, 205, 341–348. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, X.; You, Z.; Zhang, L. Leaf image based cucumber disease recognition using sparse representation classification. Comput. Electron. Agric. 2017, 134, 135–141. [Google Scholar] [CrossRef]
- Ning, H.; Zhao, B.; Yuan, Y. Semantics-Consistent Representation Learning for Remote Sensing Image-Voice Retrieval. IEEE Trans. Geosci. Remote. Sens. 2021. [Google Scholar] [CrossRef]
- Almabadi, E.S.; Bauman, A.; Akhter, R.; Gugusheff, J.; Van Buskirk, J.; Sankey, M.; Eberhard, J. The Effect of a Personalized Oral Health Education Program on Periodontal Health in an At-Risk Population: A Randomized Controlled Trial. Int. J. Environ. Res. Public Health 2021, 18, 846. [Google Scholar] [CrossRef] [PubMed]
- Alsoghair, M.; Almazyad, M.; Alburaykan, T.; Alsultan, A.; Alnughaymishi, A.; Almazyad, S.; Alsuhaibani, M. Medical Students and COVID-19: Knowledge, Preventive Behaviors, and Risk Perception. Int. J. Environ. Res. Public Health 2021, 18, 842. [Google Scholar] [CrossRef] [PubMed]
- Duan, C.; Xiao, N. Parallax-based second-order mixed attention for stereo image super-resolution. IET Comput. Vis. 2021. [Google Scholar] [CrossRef]
- Xie, X.; Yang, T.; Zhang, Y.; Liang, B.; Liu, L. Accurate localization of moving objects in dynamic environment for small unmanned aerial vehicle platform using global averaging. IET Comput. Vis. 2021. [Google Scholar] [CrossRef]
- Hu, J.; Kong, H.; Fan, L.; Zhou, J. Enhancing feature fusion with spatial aggregation and channel fusion for semantic segmentation. IET Comput. Vis. 2021. [Google Scholar] [CrossRef]
- Kong, J.; Shen, H.; Huang, K. DualPathGAN: Facial reenacted emotion synthesis. IET Comput. Vis. 2021. [Google Scholar] [CrossRef]
- Sohrabi Nasrabadi, M.; Safabakhsh, R. 3D object recognition with a linear time-varying system of overlay layers. IET Comput. Vis. 2021. [Google Scholar] [CrossRef]
- Mohanty, S.P.; Hughes, D.P.; Salathé, M. Using deep learning for image-based plant disease detection. Front. Plant Sci. 2016, 7, 1419. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, J.; Du, K.; Zheng, F.; Zhang, L.; Gong, Z.; Sun, Z. A recognition method for cucumber diseases using leaf symptom images based on deep convolutional neural network. Comput. Electron. Agric. 2018, 154, 18–24. [Google Scholar] [CrossRef]
- Kawasaki, Y.; Uga, H.; Kagiwada, S.; Iyatomi, H. Basic study of automated diagnosis of viral plant diseases using convolutional neural networks. In Proceedings of the International Symposium on Visual Computing, Monte Carlo, Monaco, 14–16 December 2015; Springer: Cham, Switzerland, 2015; pp. 638–645. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Adam, H. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Lin, M.; Chen, Q.; Yan, S. Network in network. arXiv 2013, arXiv:1312.4400. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. PMLR 2015, 37, 448–456. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ding, H.; Jiang, X.; Shuai, B.; Liu, A.Q.; Wang, G. Semantic correlation promoted shape-variant context for segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 8885–8894. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Polosukhin, I. Attention is all you need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Kumar, N.; Belhumeur, P.; Biswas, A.; Jacobs, D.; Kress, W.; Lopez, I.; Soares, J. Leafsnap: A computer vision system for automatic plant species identification. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2012; pp. 502–516. [Google Scholar]
- Hall, D.; McCool, C.; Dayoub, F.; Sunderhauf, N.; Upcroft, B. Evaluation of features for leaf classification in challenging conditions. In Proceedings of the 2015 IEEE Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 5–9 January 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 797–804. [Google Scholar]
- Yang, J.; Yu, K.; Gong, Y.; Huang, T. Linear spatial pyramid matching using sparse coding for image classification. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1794–1801. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layers | Output Size |
|---|---|
| Convolution layer | |
| Residual block1 | |
| Residual block2 | |
| Residual block3 | |
| Feedback self-calibration module 1 | |
| Feedback self-calibration module 2 | |
| Feedback self-calibration module 3 | |
| Self-attention aggregation module | |
| FC layer | |
| Softmax layer |
| Methods | Accuracy | Image Size |
|---|---|---|
| RCAA-Net | 0.892 | |
| RCAA-Net (adaptive) | 0.895 | |
| LeafSnap SVM (RBF) | 0.407 | |
| LeafSnap NN | 0.569 | |
| HCF SVM (RBF) | 0.676 | |
| HCF-Scale Robust SVM (RBF) | 0.625 | |
| Combined linear SVM | 0.871 | |
| SIFT linear SVM | 0.548 |
| Methods | Accuracy |
|---|---|
| RCAA-Net | 0.892 |
| Baseline | 0.617 |
| RES | 0.705 |
| Self-calibration | 0.684 |
| Self-attention | 0.751 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Sun, B.; Cheng, Y.; Li, X. Residual Self-Calibration and Self-Attention Aggregation Network for Crop Disease Recognition. Int. J. Environ. Res. Public Health 2021, 18, 8404. https://doi.org/10.3390/ijerph18168404
Zhang Q, Sun B, Cheng Y, Li X. Residual Self-Calibration and Self-Attention Aggregation Network for Crop Disease Recognition. International Journal of Environmental Research and Public Health. 2021; 18(16):8404. https://doi.org/10.3390/ijerph18168404
Chicago/Turabian StyleZhang, Qiang, Banyong Sun, Yaxiong Cheng, and Xijie Li. 2021. "Residual Self-Calibration and Self-Attention Aggregation Network for Crop Disease Recognition" International Journal of Environmental Research and Public Health 18, no. 16: 8404. https://doi.org/10.3390/ijerph18168404
APA StyleZhang, Q., Sun, B., Cheng, Y., & Li, X. (2021). Residual Self-Calibration and Self-Attention Aggregation Network for Crop Disease Recognition. International Journal of Environmental Research and Public Health, 18(16), 8404. https://doi.org/10.3390/ijerph18168404