
UJAmI Location: A Fuzzy Indoor Location System for the Elderly

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Indoor Location in the Context of Ageing
3. Fuzzy Indoor Location Methodology
3.1. Fuzzy Framework for Indoor Location
- (1)
- A smart environment in which a set of area classes exist is defined as .
- (2)
- There is a set of BLE beacons that is associated with a unique area or in an object of this area, .
- (3)
- Each inhabitant has an associated mobile device D. The mobile device can be a smartphone, smartwatch or wearable device, the only requirement is that it receives the RSSI value provided by the BLE beacons deployed in the smart environment. Each device receives the RSSI value reading frequency, and these readings generate the RSSI signal stream . In this work, the stream is defined by a set of measures where each measure is defined by a 3-tuple , where is the beacon that has an associated area , and is the RSSI value of this beacon in a timestamp .
- (4)
- A fuzzy linguistic term called proximity P is defined with membership function , being the membership degree of in contained in for the linguistic term P [54].
- (5)
- A fuzzy temporal window, , is defined with membership function [54], where is described directly as a distance function of each sample timestamp to the current time .
3.2. Fuzzy Aggregation for Indoor Location
4. Case Study
4.1. UCAmI Cup Dataset
4.2. Intelligent Processing Using the Fuzzy Indoor Location Methodology
- Temporal Window (TW) represents the temporal window identifier to manage the fluctuations of the RSSI values from BLE beacons. The most accurate correlation between the activity carried out and the inhabitant’s location is obtained using a 5-second temporal window.
- Datetime (DT) is the date and time at which the RSSI value of the beacon was obtained by the mobile device.
- Beacon (Bc) shows the name of the beacon from which the RSSI value has been obtained by the mobile device.
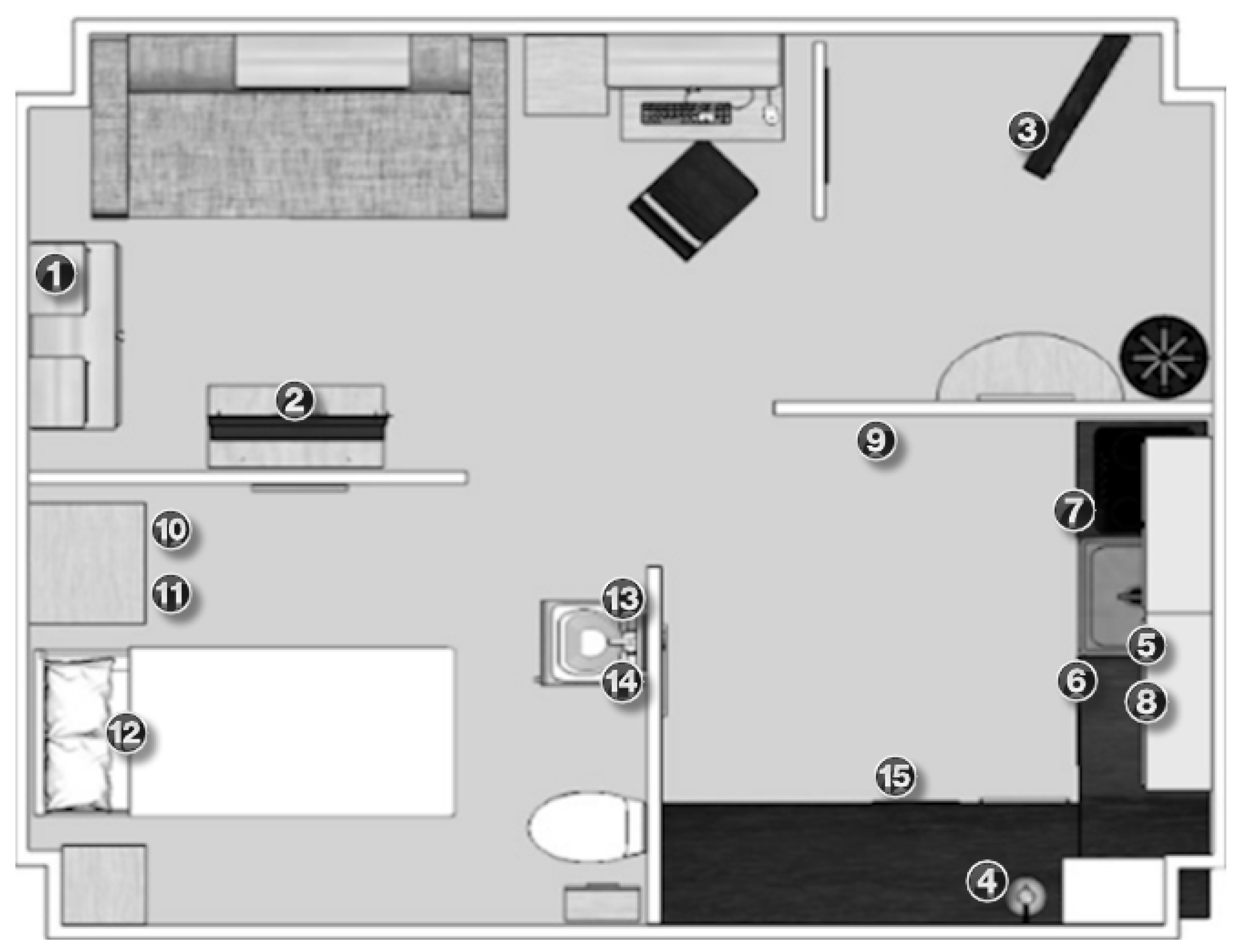
- Beacon Area (Bc Area) indicates the area where the beacon is located in the smart lab, as illustrated in Figure 2.
- RSSI is the value received in the mobile device for the signal emitted by the beacon.
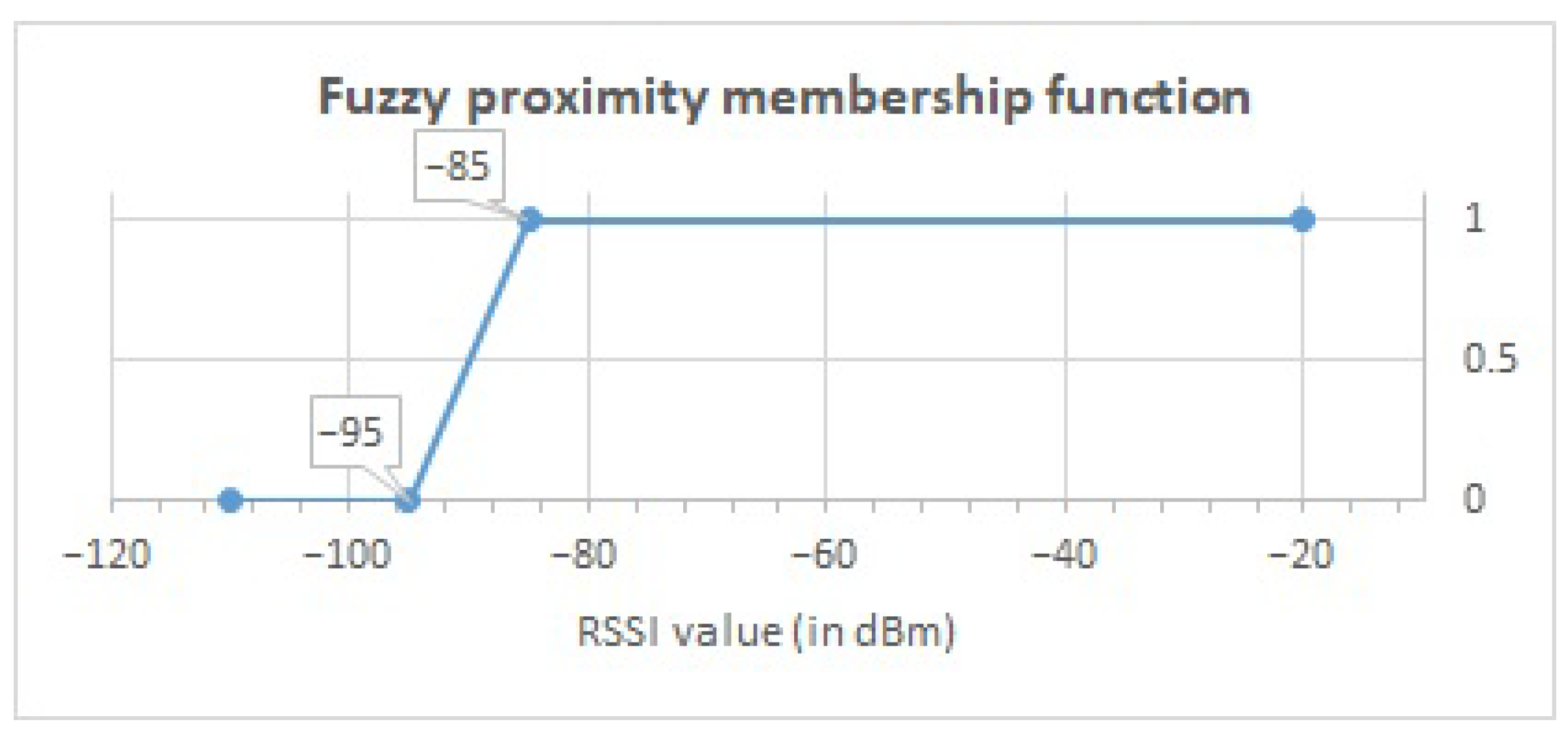
- Fuzzy Value represents the fuzzy RSSI value obtained from the fuzzy proximity membership function proposed in Figure 3.
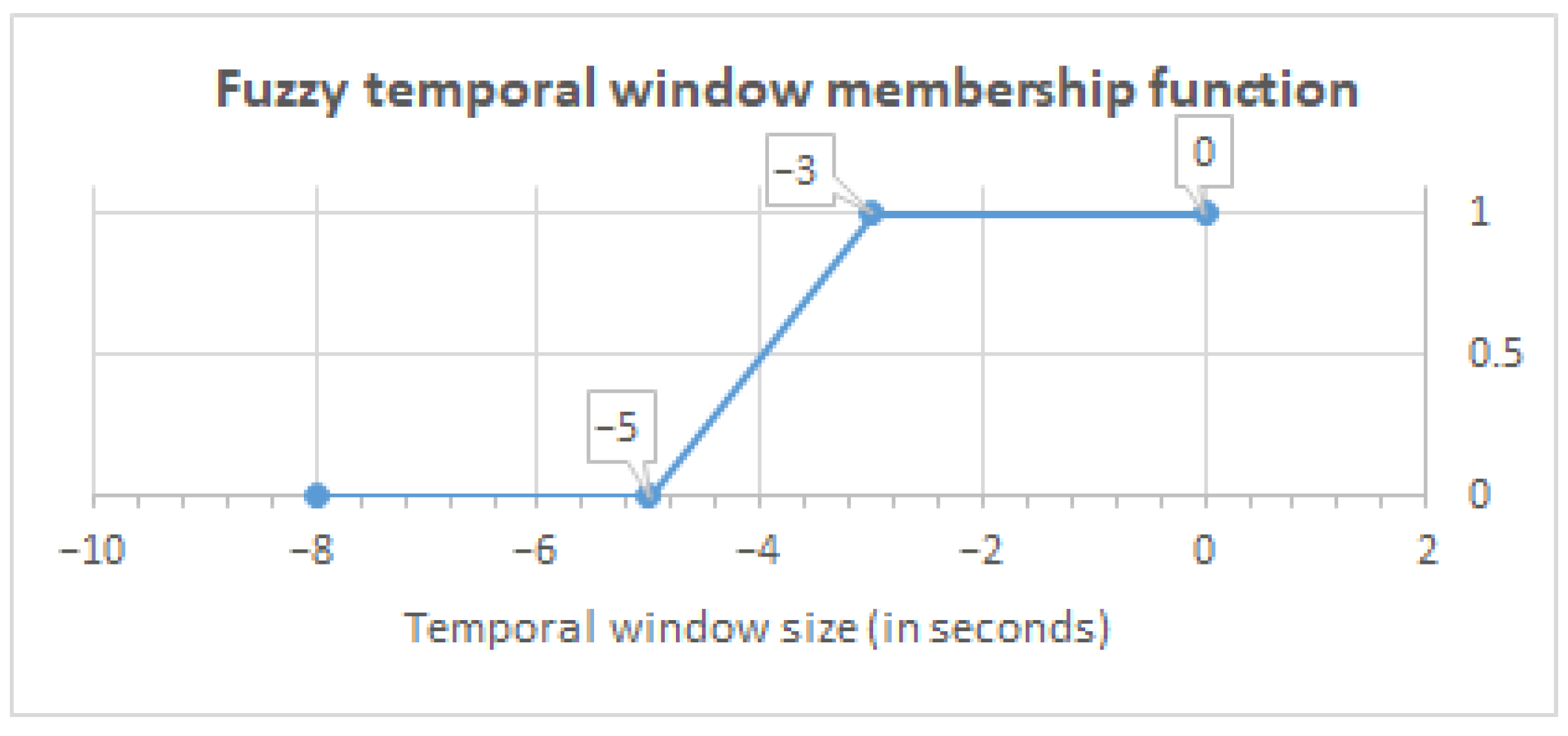
- Bathroom area (BTA) specifies the calculated fuzzy values grouped in the defined temporal window, after applying the membership function proposed in Figure 4, and that belong to beacons located in the bathroom area.
- Bedroom area (BDA) shows the calculated fuzzy values that are grouped in the temporal window, to which the fuzzy temporal window membership function shown in Figure 4 has been applied, and that belong to beacons in the same bedroom area.
- Kitchen area (KTA) groups the calculated fuzzy values in the defined temporal window, as considered in Figure 4, and that belong to beacons located in the same kitchen area.
- Average Bathroom (Av BTA) shows the average value of the grouped values of the same bathroom area.
- Average Bedroom (Av BDA) represents the average value of the grouped fuzzy values of the same bedroom area.
- Average Kitchen (Av KTA) provides the average value of the grouped values of the same kitchen area.
- Location (Loc) is the location of the inhabitant in the smart lab based on the highest value of the averages obtained in each area.
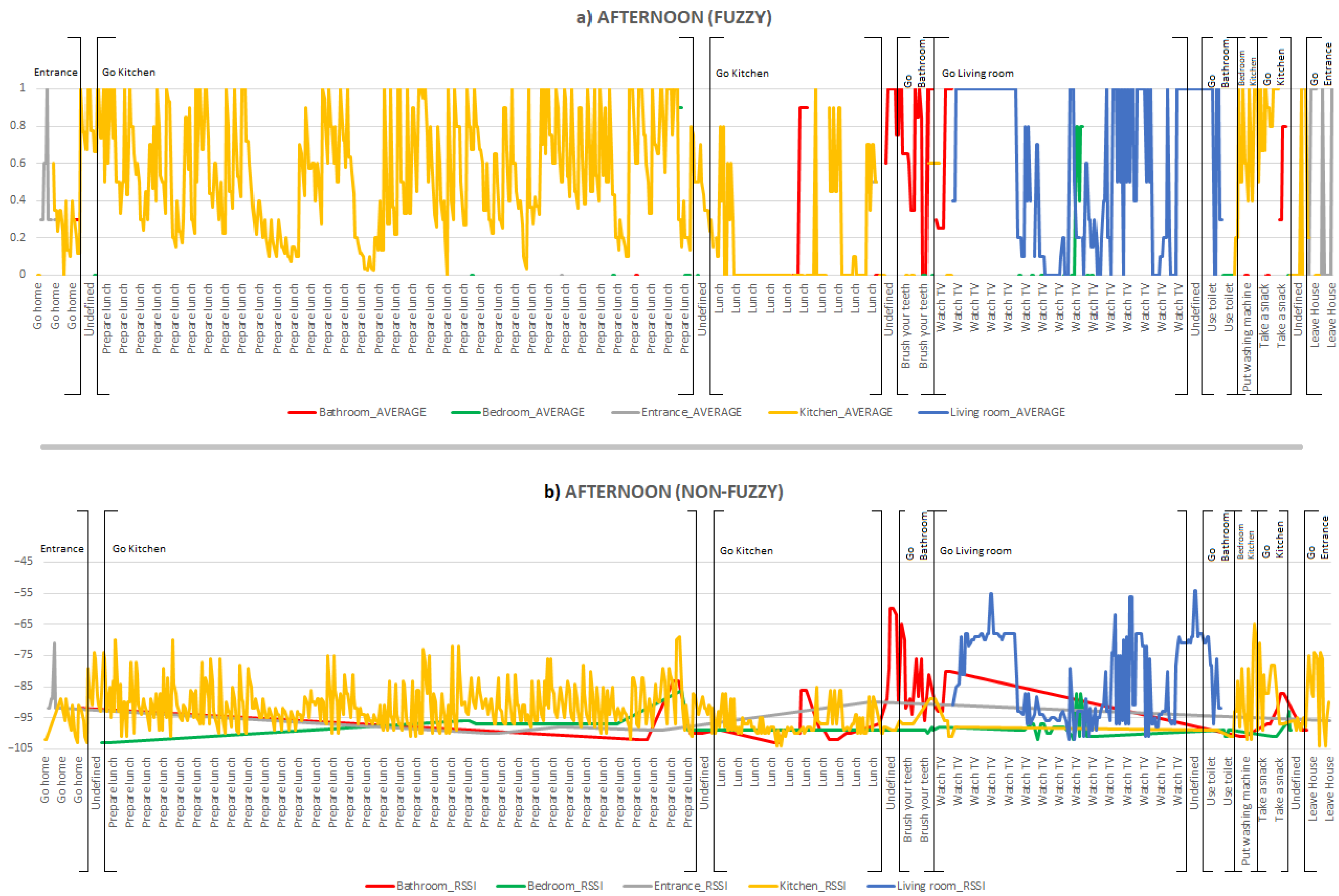
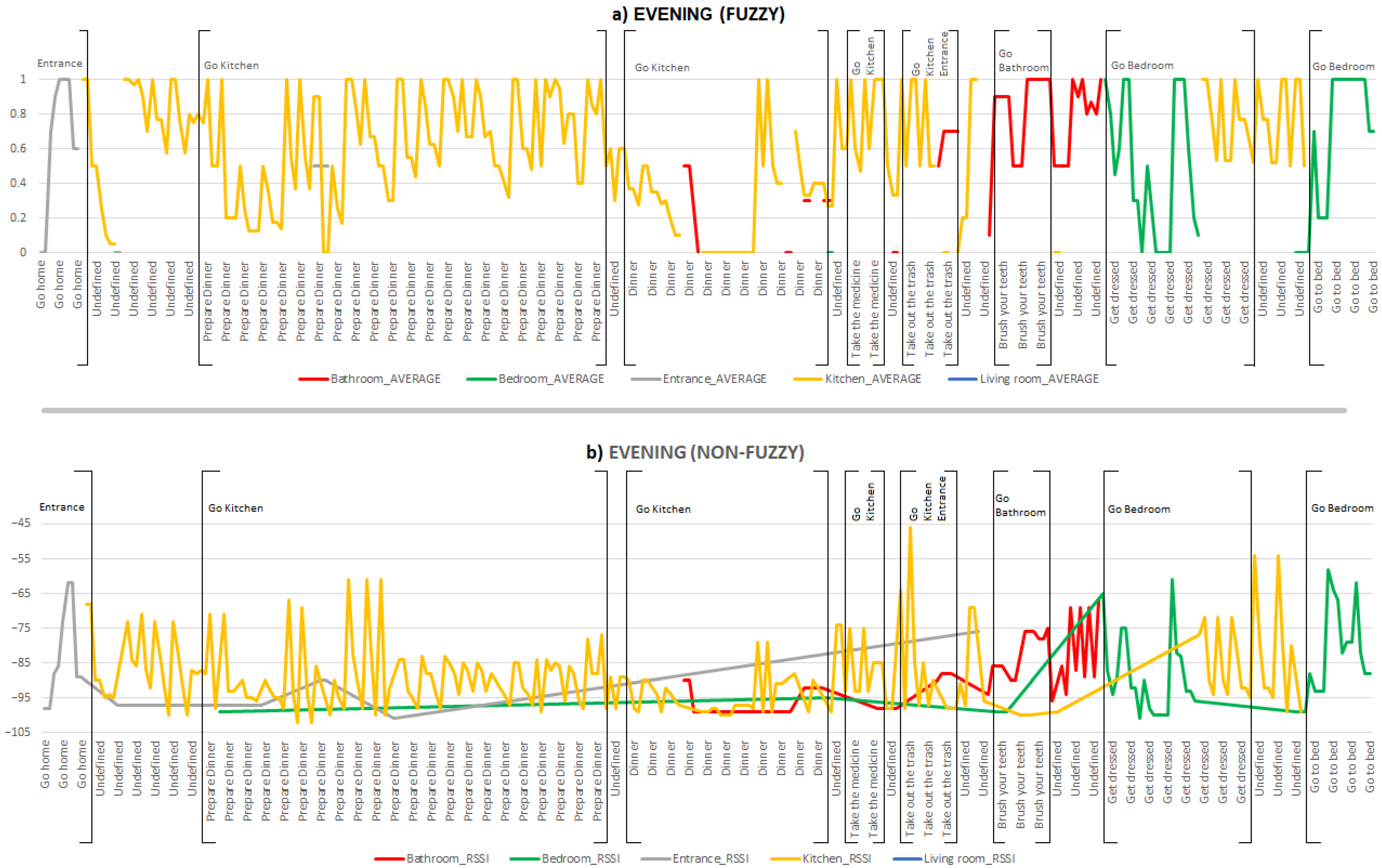
4.3. Fuzzy vs. Non-Fuzzy Comparison
5. UJAmI Location
5.1. General Description
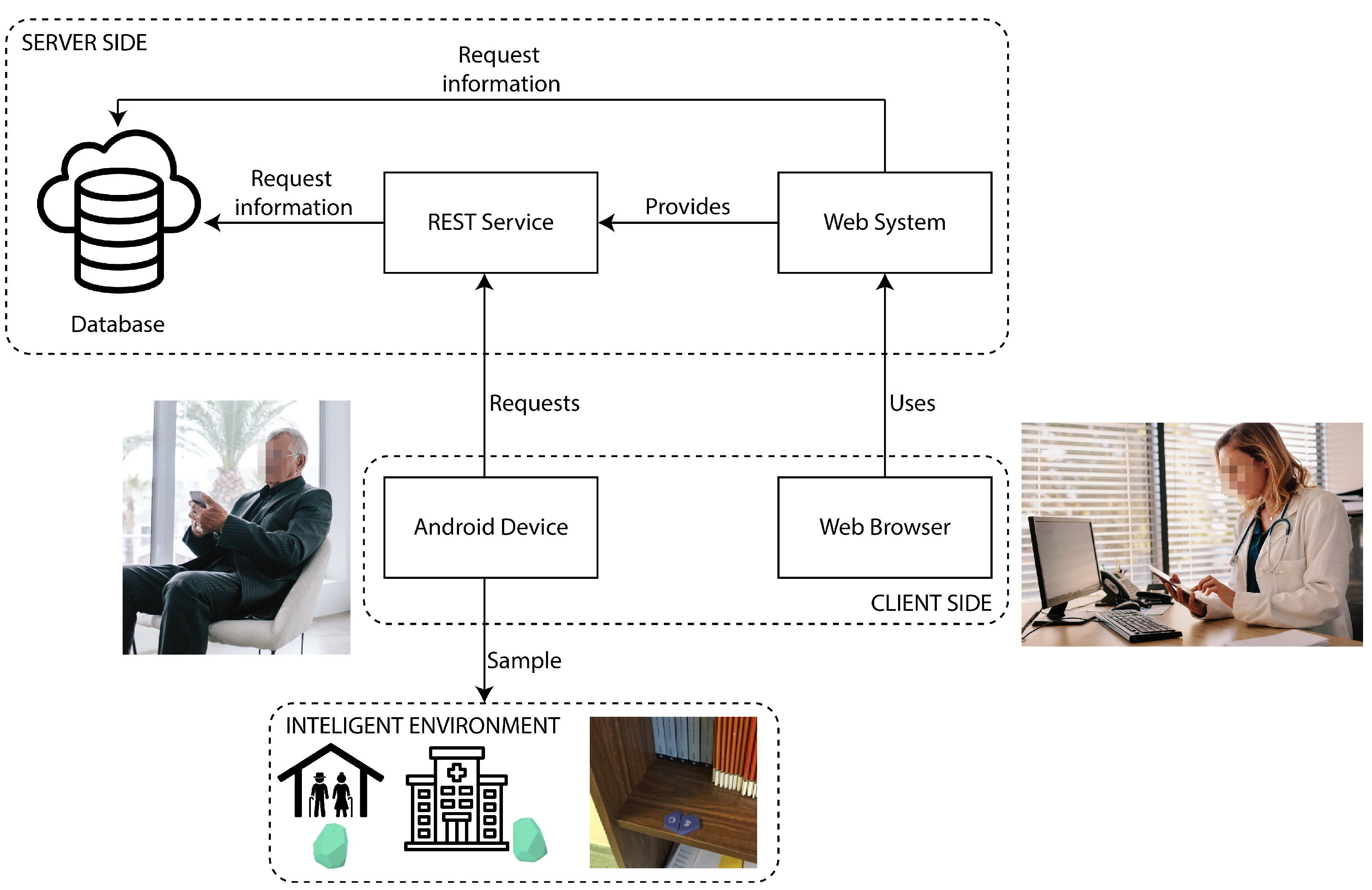
5.2. UJAmI Location Architecture
- The database with the model that is responsible for receiving, storing and retrieving the data.
- The REST service that acts as an intermediary between the database and any application that needs to store or retrieve information.
- The web service used to support the REST service and the web application to monitor the inhabitants.
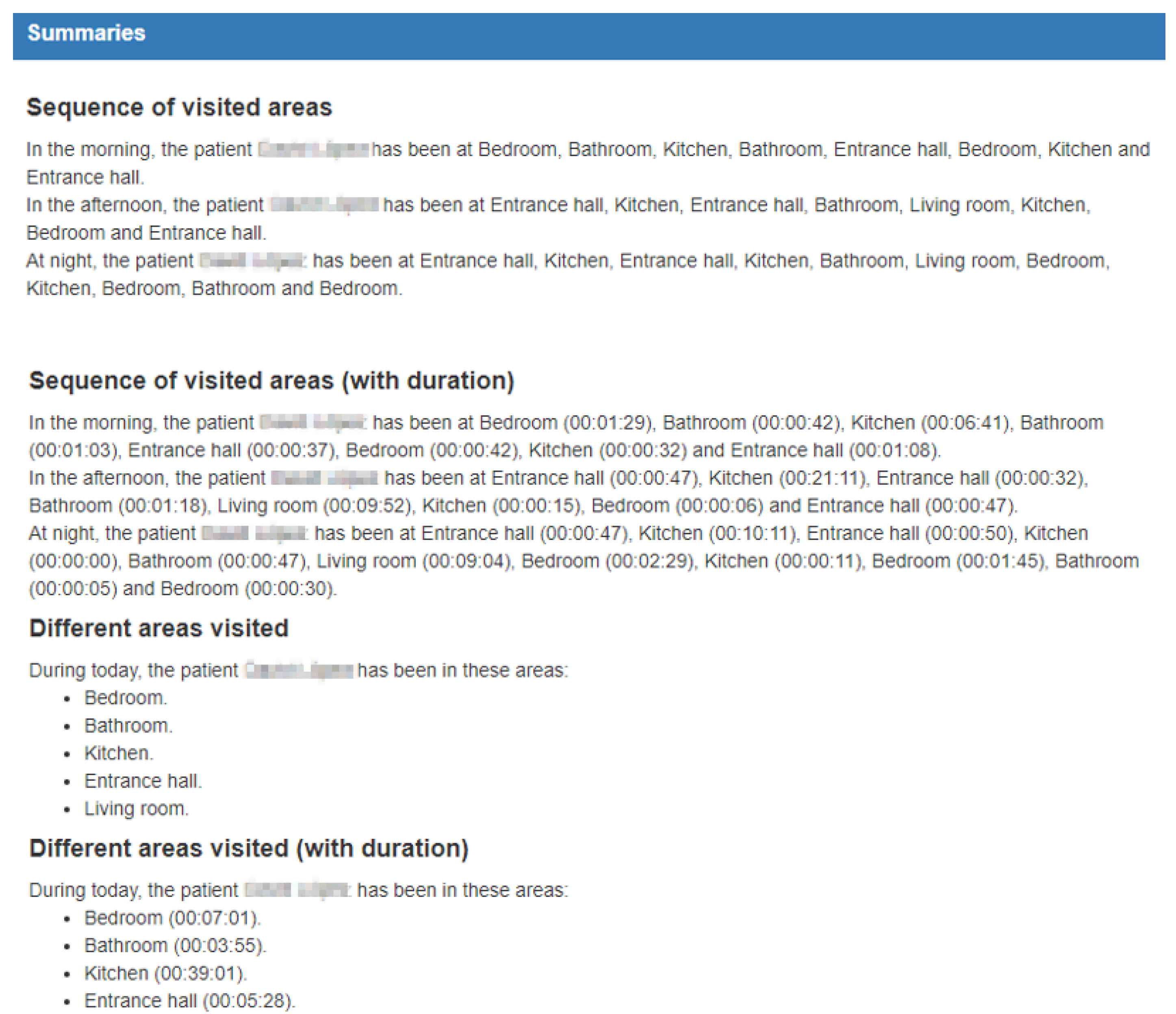
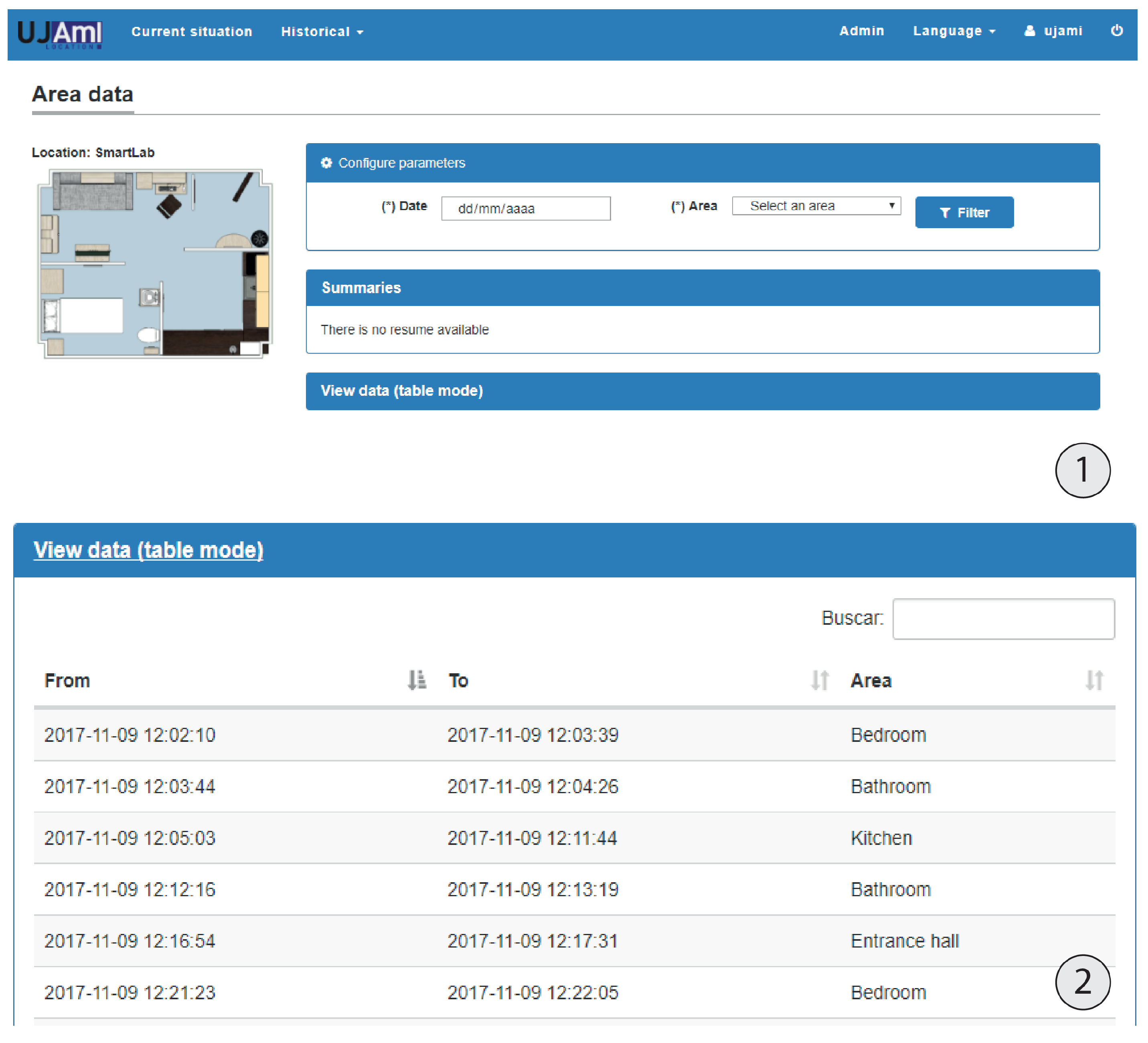
5.3. UJAmI Location Functionality
- 1.
- Each inhabitant has an associated mobile device where the UJAmI Location application is started up.
- 2.
- The mobile device collects samples from RSSI beacons from a time frequency.
- 3.
- The mobile device processes the RSSI samples with the proposed fuzzy method in a fuzzy temporal window to compute the area where the inhabitant is according to the model presented in Section 3.
- 4.
- The mobile device sends the computed area to the server to store it.
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BLE | Bluetooth Low Energy |
| IoT | Internet of Things |
| IPS | Indoor Positioning Systems |
| RP | Reference Points |
| RSS | Radio Signal Strength |
| RSSI | Received Signal Strength Indicator |
| UJAmI Smart Lab | Smart Lab of the University of Jaén |
References
- United Nations Department of Economic and Social Affairs, Population Division. World Population Ageing 2020 Highlights: Living Arrangements of Older Persons. 2020. Available online: https://www.un.org/development/desa/pd/sites/www.un.org.development.desa.pd/files/undesa_pd-2020_world_population_ageing_highlights.pdf (accessed on 9 March 2021).
- Domaradzki, J.; Kozieł, S.; Ignasiak, Z.; Sławińska, T.; Skrzek, A.; Kołodziej, M. The Risk for Fall and Functional Dependence in Polish Adults 60–87 Years Old. Coll. Antropol. 2017, 41, 81–87. [Google Scholar] [PubMed]
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J. Evolution of Indoor Positioning Technologies: A Survey. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Horng, G.J.; Chen, K.H. The Smart Fall Detection Mechanism for Healthcare Under Free-Living Conditions. Wirel. Pers. Commun. 2021, 118, 715–753. [Google Scholar] [CrossRef]
- Pan, Z.; Wei, C. Human activity monitoring based on indoor map positioning. Microsyst. Technol. 2021, 27, 2919–2923. [Google Scholar] [CrossRef]
- López-Medina, M.A.; Espinilla, M.; Cleland, I.; Nugent, C.; Medina, J. Fuzzy cloud-fog computing approach application for human activity recognition in smart homes. J. Intell. Fuzzy Syst. 2020, 38, 709–721. [Google Scholar] [CrossRef]
- Selvakanmani, S.; Sumathi, M. Fuzzy assisted fog and cloud computing with MIoT system for performance analysis of health surveillance system. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 3423–3436. [Google Scholar] [CrossRef]
- Montoliu, R.; Sansano, E.; Gascó, A.; Belmonte, O.; Caballer, A. Indoor Positioning for Monitoring Older Adults at Home: Wi-Fi and BLE Technologies in Real Scenarios. Electronics 2020, 9, 728. [Google Scholar] [CrossRef]
- Hamad, R.; Salguero, A.; Bouguelia, M.R.; Espinilla, M.; Medina, J. Efficient Activity Recognition in Smart Homes Using Delayed Fuzzy Temporal Windows on Binary Sensors. IEEE J. Biomed. Health Inform. 2020, 24, 387–395. [Google Scholar] [CrossRef]
- Lopez, M.; Espinilla, M.; Paggeti, C.; Quero, J. Activity recognition for IoT devices using fuzzy spatio-temporal features as environmental sensor fusion. Sensors 2019, 19, 3512. [Google Scholar] [CrossRef] [Green Version]
- Bernal Monroy, E.; Polo Rodriguez, A.; Espinilla Estevez, M.; Medina Quero, J. Fuzzy monitoring of in-bed postural changes for the prevention of pressure ulcers using inertial sensors attached to clothing. J. Biomed. Inform. 2020, 107, 103476. [Google Scholar] [CrossRef]
- Espinilla, M.; Medina, J.; Garcia-Fernandez, A.L.; Campana, S.; Londono, J. Fuzzy Intelligent System for Patients with Preeclampsia in Wearable Devices. Mob. Inf. Syst. 2017, 2017, 7838464. [Google Scholar] [CrossRef]
- Medina Quero, J.; Fernandez Olmo, M.; Pelaez Aguilera, M.; Espinilla Estevez, M. Real-Time Monitoring in Home-Based Cardiac Rehabilitation Using Wrist-Worn Heart Rate Devices. Sensors 2017, 17, 2892. [Google Scholar] [CrossRef] [Green Version]
- Pelaez-Aguilera, M.; Espinilla, M.; Fernandez Olmo, M.; Medina, J. Fuzzy Linguistic Protoforms to Summarize Heart Rate Streams of Patients with Ischemic Heart Disease. Complexity 2019, 2019, 2694126. [Google Scholar] [CrossRef] [Green Version]
- Espinilla, M.; Martínez, L.; Medina, J.; Nugent, C. The Experience of Developing the UJAmI Smart Lab. IEEE Access 2018, 6, 34631–34642. [Google Scholar] [CrossRef]
- Espinilla, M.; Medina, J.; Nugent, C. UCAmI Cup. Analyzing the UJA Human Activity Recognition Dataset of Activities of Daily Living. Proceedings 2018, 2, 1267. [Google Scholar] [CrossRef] [Green Version]
- Hwang, I.; Jang, Y.J. Process Mining to Discover Shoppers’ Pathways at a Fashion Retail Store Using a WiFi-Base Indoor Positioning System. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1786–1792. [Google Scholar] [CrossRef]
- Suciu, G.; Balanean, C.; Pasat, A.; Istrate, C.; Ijaz, H.; Matei, R. A new concept of smart shopping platform based on IoT solutions. In Proceedings of the 2020 12th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Bucharest, Romania, 25–27 June 2020. [Google Scholar]
- Chaiwongven, A.; Kovavisaruch, L.; Sanpechuda, T.; Chinda, K.; Wisadsud, S.; Wongsatho, T.; Kaemarungsi, K. An Analyze Movement Path of Employees in Fire Drill by Indoor Location System Using Bluetooth. In Proceedings of the 2018 International Joint Symposium on Artificial Intelligence and Natural Language Processing (iSAI-NLP), Pattaya, Thailand, 15–17 November 2018. [Google Scholar]
- Demirkan, D.C.; Duzgun, S. An Evaluation of AR-Assisted Navigation for Search and Rescue in Underground Spaces. In Proceedings of the 2020 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Recife, Brazil, 9–13 November 2020; pp. 241–246. [Google Scholar]
- Yang, C.; Shao, H. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Almeida, A.; Mulero, R.; Rametta, P.; Urošević, V.; Andrić, M.; Patrono, L. A critical analysis of an IoT—Aware AAL system for elderly monitoring. Future Gener. Comput. Syst. 2019, 97, 598–619. [Google Scholar] [CrossRef]
- Kok, M.; Hol, J.D.; Schön, T.B. Indoor Positioning Using Ultrawideband and Inertial Measurements. IEEE Trans. Veh. Technol. 2015, 64, 1293–1303. [Google Scholar] [CrossRef] [Green Version]
- Đošić, S.; Stojanović, I.; Jovanovic, M.; Nikolic, T.; Djordjevic, G. Fingerprinting-Assisted UWB-based Localization Technique for Complex Indoor Environments. Expert Syst. Appl. 2020, 167, 114188. [Google Scholar] [CrossRef]
- Feldmann, S.; Kyamakya, K.; Zapater, A.; Lue, Z. An Indoor Bluetooth-Based Positioning System: Concept, Implementation and Experimental Evaluation. In Proceedings of the International Conference on Wireless Networks, Las Vegas, NV, USA, 23–26 June 2003; pp. 109–113. [Google Scholar]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Mohebbi, P.; Stroulia, E.; Nikolaidis, I. Sensor-Data Fusion for Multi-Person Indoor Location Estimation. Sensors 2017, 17, 2377. [Google Scholar] [CrossRef] [Green Version]
- AL-Madani, B.; Orujov, F.; Maskeliūnas, R.; Damaševičius, R.; Venčkauskas, A. Fuzzy Logic Type-2 Based Wireless Indoor Localization System for Navigation of Visually Impaired People in Buildings. Sensors 2019, 19, 2114. [Google Scholar] [CrossRef] [Green Version]
- Ni, L.; Liu, Y.; Lau, Y.; Patil, A. Landmarc: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, 2003, (PerCom 2003), Fort Worth, TX, USA,, 26 March 2003; pp. 407–415. [Google Scholar] [CrossRef]
- Weinstein, R. RFID: A technical overview and its application to the enterprise. IT Prof. 2005, 7, 27–33. [Google Scholar] [CrossRef]
- Ceipidor, U.; Medaglia, C.; Serbanati, A.; Azzalin, G.; Barboni, M.; Rizzo, F.; Sironi, M. SeSaMoNet: An RFID-based economically viable navigation system for the visually impaired. Int. J. Technol. Res. Appl. 2009, 1, 214–224. [Google Scholar] [CrossRef]
- Ahsan, K.; Hanifa, S.; Kingston, P. RFID Applications: An Introductory and Exploratory Study. Int. J. Comput. Sci. Issues 2010, 7, 1–7. [Google Scholar]
- Blasio, G.; Quesada-Arencibia, A.; García, C.; Rodríguez-Rodríguez, J. Bluetooth Low Energy Technology Applied to Indoor Positioning Systems: An Overview. In Computer Aided Systems Theory—EUROCAST 2019; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020; pp. 83–90. [Google Scholar] [CrossRef]
- Bluetooth SIG Proprietary: Bluetooth 4.0 Core Specification. Available online: https://www.bluetooth.org/docman/handlers/downloaddoc.ashx?doc_id=456433 (accessed on 16 March 2021).
- Bluetooth SIG Proprietary: Bluetooth 5.0 Core Specification. Available online: https://www.bluetooth.org/docman/handlers/DownloadDoc.ashx?doc_id=421043 (accessed on 16 March 2021).
- Bluetooth SIG Proprietary: Bluetooth 5.1 Core Specification. Available online: https://www.bluetooth.org/docman/handlers/downloaddoc.ashx?doc_id=457080te (accessed on 16 March 2021).
- Bluetooth SIG Proprietary: Bluetooth 5.2 Core Specification. Available online: https://www.bluetooth.org/docman/handlers/downloaddoc.ashx?doc_id=478726 (accessed on 16 March 2021).
- Anastasi, G.; Bandelloni, R.; Conti, M.; Delmastro, F.; Gregori, E.; Mainetto, G. Experimenting an indoor bluetooth-based positioning service. In Proceedings of the 23rd International Conference on Distributed Computing Systems Workshops, Providence, RI, USA, 19–22 May 2003; pp. 480–483. [Google Scholar] [CrossRef] [Green Version]
- Hallberg, J.; Nilsson, M.; Synnes, K. Positioning with Bluetooth. In Proceedings of the 10th International Conference on Telecommunications, 2003, ICT 2003, Papeete, France, 23 February–1 March 2003; pp. 954–958. [Google Scholar] [CrossRef] [Green Version]
- Gwon, Y.; Jain, R.; Kawahara, T. Robust indoor location estimation of stationary and mobile users. In Proceedings of the IEEE INFOCOM 2004, Hong Kong, China, 7–11 March 2004; pp. 1032–1043. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P. Optimization of BLE Beacon Density for RSSI-Based Indoor Localization. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mendoza-Silva, G.M.; Matey-Sanz, M.; Torres-Sospedra, J.; Huerta, J. BLE RSS Measurements Dataset for Research on Accurate Indoor Positioning. Data 2019, 4, 12. [Google Scholar] [CrossRef] [Green Version]
- Campos, R.; Lovisolo, L. RF POSITIONING Fundamentals, Applications and Tools; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- Zhu, J.; Luo, H.; Chen, Z.; Li, Z. RSSI based Bluetooth low energy indoor positioning. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 526–533. [Google Scholar] [CrossRef]
- Neburka, J.; Tlamsa, Z.; Benes, V.; Polak, L.; Kaller, O.; Bolecek, L.; Sebesta, J.; Kratochvil, T. Study of the performance of RSSI based Bluetooth Smart indoor positioning. In Proceedings of the 2016 26th International Conference Radioelektronika (RADIOELEKTRONIKA), Kosice, Slovakia, 19–20 April 2016; pp. 121–125. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.Y. Practical Fingerprinting Localization for Indoor Positioning System by Using Beacons. J. Sens. 2017, 2017, 9742170. [Google Scholar] [CrossRef] [Green Version]
- Mendoza Silva, G.; Torres-Sospedra, J.; Huerta, J. A Meta-Review of Indoor Positioning Systems. Sensors 2019, 19, 4507. [Google Scholar] [CrossRef] [Green Version]
- Faragher, R.; Harle, R. An analysis of the accuracy of bluetooth low energy for indoor positioning applications. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 201–210. [Google Scholar]
- Bouchard, K.; Ramezani, R.; Naeim, A. Features based proximity localization with Bluetooth emitters. In Proceedings of the 2016 IEEE 7th Annual Ubiquitous Computing, Electronics Mobile Communication Conference (UEMCON), New York, NY, USA, 20–22 October 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Jeon, K.E.; She, J.; Soonsawad, P.; Ng, P.C. BLE Beacons for Internet of Things Applications: Survey, Challenges, and Opportunities. IEEE Internet Things J. 2018, 5, 811–828. [Google Scholar] [CrossRef]
- Ahmed, Z.E.; Saeed, R.A.; Mukherjee, A.; Ghorpade, S.N. 10 - Energy optimization in low-power wide area networks by using heuristic techniques. In LPWAN Technologies for IoT and M2M Applications; Chaudhari, B.S., Zennaro, M., Eds.; Academic Press: Cambridge, MA, USA, 2020; pp. 199–223. [Google Scholar] [CrossRef]
- Datta, P.; Namin, A.S.; Chatterjee, M. A Survey of Privacy Concerns in Wearable Devices. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 4549–4553. [Google Scholar] [CrossRef]
- Chen, L.; Hoey, J.; Nugent, C.D.; Cook, D.J.; Yu, Z. Sensor-Based Activity Recognition. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 790–808. [Google Scholar] [CrossRef]
- Dong, W.; Wong, F. Fuzzy weighted averages and implementation of the extension principle. Fuzzy Sets Syst. 1987, 21, 183–199. [Google Scholar] [CrossRef]
- Jiménez, A.; Seco, F.; Peltola, P.; Espinilla, M. Location of Persons Using Binary Sensors and BLE Beacons for Ambient Assitive Living. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 206–212. [Google Scholar] [CrossRef]
- Beuchelt, G. Securing Web Applications, Services, and Servers. In Computer and Information Security Handbook; Morgan Kaufmann: Burlington, MA, USA, 2013; pp. 143–163. [Google Scholar]
- United Nations Sustainable Development Group. Sustainable Development Goals. 2020. Available online: https://www.un.org/sustainabledevelopment/ (accessed on 22 July 2021).
- Espinosa, Á.V.; López Ruiz, J.L.; Mata, F.; Estevez, M. Application of IoT in Healthcare: Keys to Implementation of the Sustainable Development Goals. Sensors 2021, 21, 2330. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID Activity | Activity | Areas |
|---|---|---|
| Act01 | Take medicine | Kitchen |
| Act02 | Prepare breakfast | Kitchen |
| Act03 | Prepare lunch | Kitchen |
| Act04 | Prepare dinner | Kitchen |
| Act05 | Breakfast | Kitchen |
| Act06 | Lunch | Kitchen |
| Act07 | Dinner | Kitchen |
| Act08 | Take a snack | Kitchen |
| Act09 | Watch TV | Living room |
| Act10 | Go home | Entrance |
| Act11 | Play a video game | Living room |
| Act12 | Relax on the sofa | Living room |
| Act13 | Leave house | Entrance |
| Act14 | Visit in the smart lab | Entrance |
| Act15 | Take out the trash | Kitchen, Entrance |
| Act16 | Wash | Bathroom |
| Act17 | Brush teeth | Bathroom |
| Act18 | Use toilet | Bathroom |
| Act19 | Wash dishes | Kitchen |
| Act20 | Turn on washing machine | Bedroom, Kitchen |
| Act21 | Work at the table | Workplace |
| Act22 | Get dressed | Bedroom |
| Act23 | Go to bed | Bedroom |
| Act24 | Get up from bed | Bedroom |
| Act25 | Read a book | Living room |
| TW | DT | Bc | Bc Area | RSSI | Fuzzy Value | BTA | BDA | KTA | Av BTA | Av BDA | Av KTA | Loc |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 13:29:29 | BT | BTA | −89 | 0.6 | [0.6] | - | - | 0.6 | - | - | BTA |
| 2 | 13:29:29 | TB | BTA | −88 | 0.7 | [0.7, 0.6] | - | - | 0.65 | - | - | BTA |
| 3 | 13:29:33 | WB | KTA | −93 | 0.2 | [0.35, 0.3] | - | [0.2] | 0.35 | - | 0.2 | BTA |
| 4 | 13:29:33 | PD | BDA | −92 | 0.3 | [0.35, 0.3] | [0.3] | [0.2] | 0.35 | 0.3 | 0.2 | BTA |
| 5 | 13:29:33 | BT | BTA | −76 | 1.0 | [1.0, 0.35, 0.3] | [0.3] | [0.2] | 0.55 | 0.3 | 0.2 | BTA |
| 6 | 13:29:33 | TB | BTA | −88 | 0.7 | [0.7, 1.0, 0.35, 0.3] | [0.3] | [0.2] | 0.59 | 0.3 | 0.2 | BTA |
| 7 | 13:29:39 | BT | BTA | −76 | 1.0 | [1.0] | - | - | 1.0 | - | - | BTA |
| 8 | 13:29:39 | PD | BDA | −94 | 0.1 | [1.0] | [0.1] | - | 1.0 | 0.1 | - | BTA |
| 9 | 13:29:39 | TB | BTA | −88 | 0.7 | [0.7, 1.0] | [0.1] | - | 0.85 | 0.1 | - | BTA |
| 10 | 13:29:40 | TB | BTA | −88 | 0.7 | [0.7, 0.7, 1.0] | [0.1] | - | 0.8 | 0.1 | - | BTA |
| 11 | 13:29:43 | WD | BDA | −92 | 0.3 | [0.7, 0.35, 0.5] | [0.3, 0.05] | - | 0.52 | 0.17 | - | BTA |
| 12 | 13:29:44 | PD | BDA | −100 | 0.0 | [0.35, 0.0, 0.0] | [0.0, 0.3, 0.0] | - | 0.12 | 0.1 | - | BTA |
| Time of Day | Samples | Fuzzy TP | Fuzzy Accuracy | Non-Fuzzy TP | Non-Fuzzy Accuracy |
|---|---|---|---|---|---|
| Morning | 219 | 193 | 88.13% | 166 | 75.80% |
| Afternoon | 773 | 712 | 92.11% | 613 | 79.30% |
| Evening | 226 | 211 | 93.36% | 209 | 92.48% |
| Full-day | 1218 | 1116 | 91.63% | 988 | 81.12% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Albín-Rodríguez, A.-P.; De-La-Fuente-Robles, Y.-M.; López-Ruiz, J.-L.; Verdejo-Espinosa, Á.; Espinilla Estévez, M. UJAmI Location: A Fuzzy Indoor Location System for the Elderly. Int. J. Environ. Res. Public Health 2021, 18, 8326. https://doi.org/10.3390/ijerph18168326
Albín-Rodríguez A-P, De-La-Fuente-Robles Y-M, López-Ruiz J-L, Verdejo-Espinosa Á, Espinilla Estévez M. UJAmI Location: A Fuzzy Indoor Location System for the Elderly. International Journal of Environmental Research and Public Health. 2021; 18(16):8326. https://doi.org/10.3390/ijerph18168326
Chicago/Turabian StyleAlbín-Rodríguez, Antonio-Pedro, Yolanda-María De-La-Fuente-Robles, José-Luis López-Ruiz, Ángeles Verdejo-Espinosa, and Macarena Espinilla Estévez. 2021. "UJAmI Location: A Fuzzy Indoor Location System for the Elderly" International Journal of Environmental Research and Public Health 18, no. 16: 8326. https://doi.org/10.3390/ijerph18168326
APA StyleAlbín-Rodríguez, A.-P., De-La-Fuente-Robles, Y.-M., López-Ruiz, J.-L., Verdejo-Espinosa, Á., & Espinilla Estévez, M. (2021). UJAmI Location: A Fuzzy Indoor Location System for the Elderly. International Journal of Environmental Research and Public Health, 18(16), 8326. https://doi.org/10.3390/ijerph18168326