Research on the Comfort of Vehicle Passengers Considering the Vehicle Motion State and Passenger Physiological Characteristics: Improving the Passenger Comfort of Autonomous Vehicles


Abstract
1. Introduction
1.1. Background
1.2. Research Status
1.2.1. Research Method of Relationship between Vehicle Motion Characteristics and Passenger Comfort
1.2.2. Research on the Relationship between Passenger Physiological Characteristics and Ride Comfort
1.2.3. Intelligent Driving Technology Considering Passenger Comfort
2. Materials and Methods
2.1. Experimental Equipment
2.1.1. Vehicle Motion Parameter Collection Equipment
2.1.2. Real-Time Collection Equipment for Subjective Passenger Comfort
2.1.3. Communication Equipment
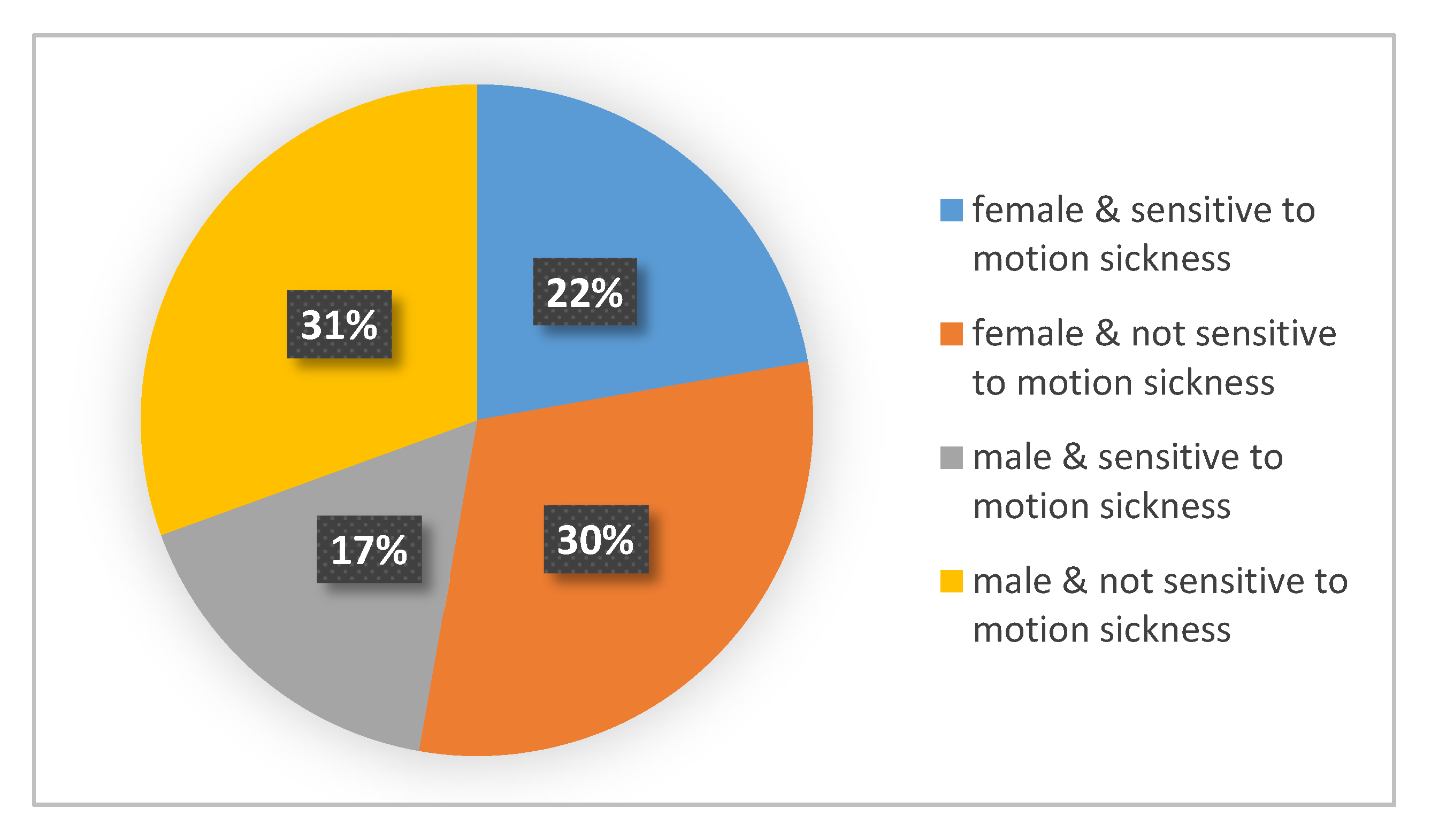
2.2. Participants
2.3. Driver and Maneuvers
2.4. Experimental Site
2.5. Experimental Procedure
2.6. Data Processing
3. Results
3.1. Reliability Test of Subjective Comfort Evaluation of Subjects
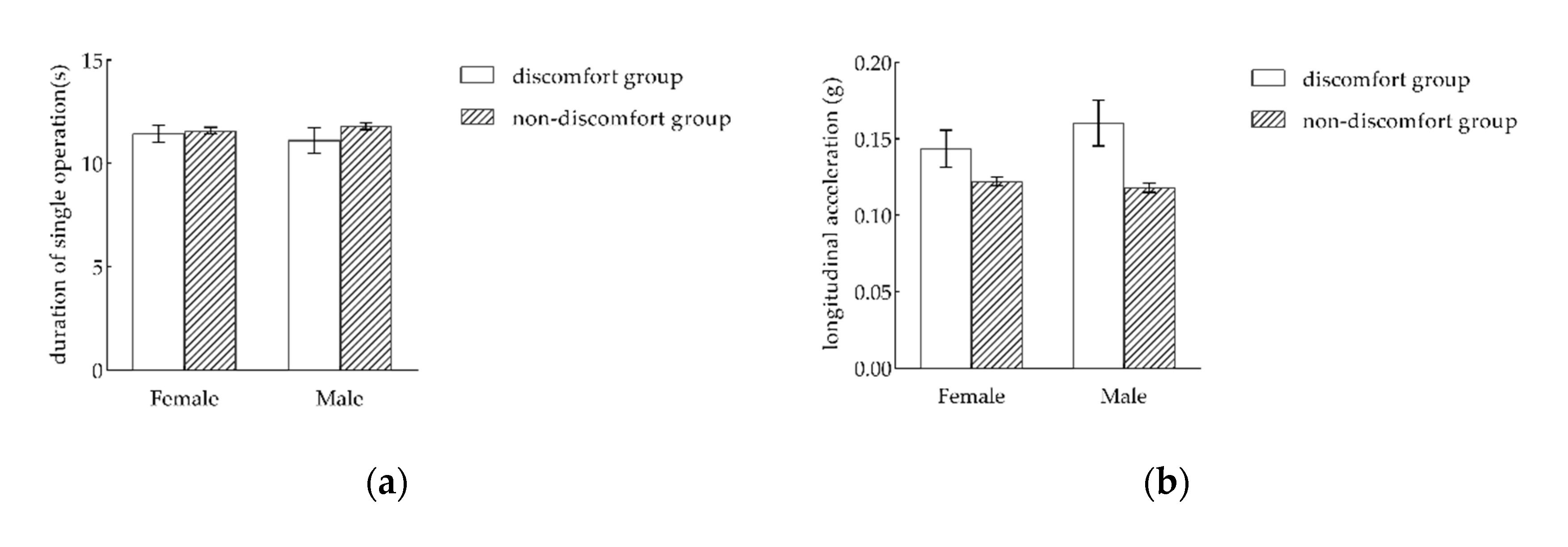
3.2. The Relationships between the Evaluation Results of Passenger Comfort and Their Physiological Characteristics and Vehicle Operating Parameters
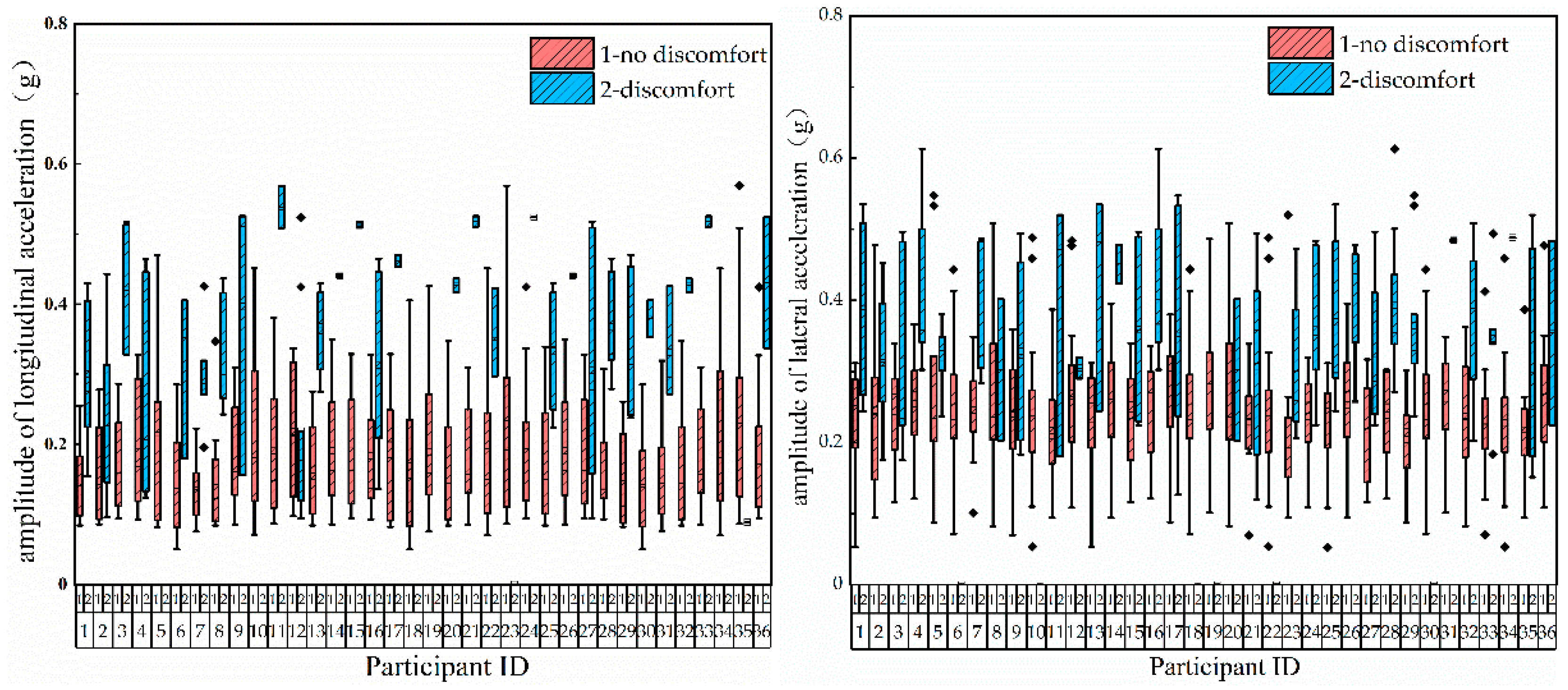
3.3. Analysis of the Difference in Passengers’ Acceptance of the Vehicle Motion State Parameters
4. Passenger Comfort Evaluation and Prediction Method Based on BiLSTM
4.1. Model Input Parameters
4.2. Model Evaluation Indicators
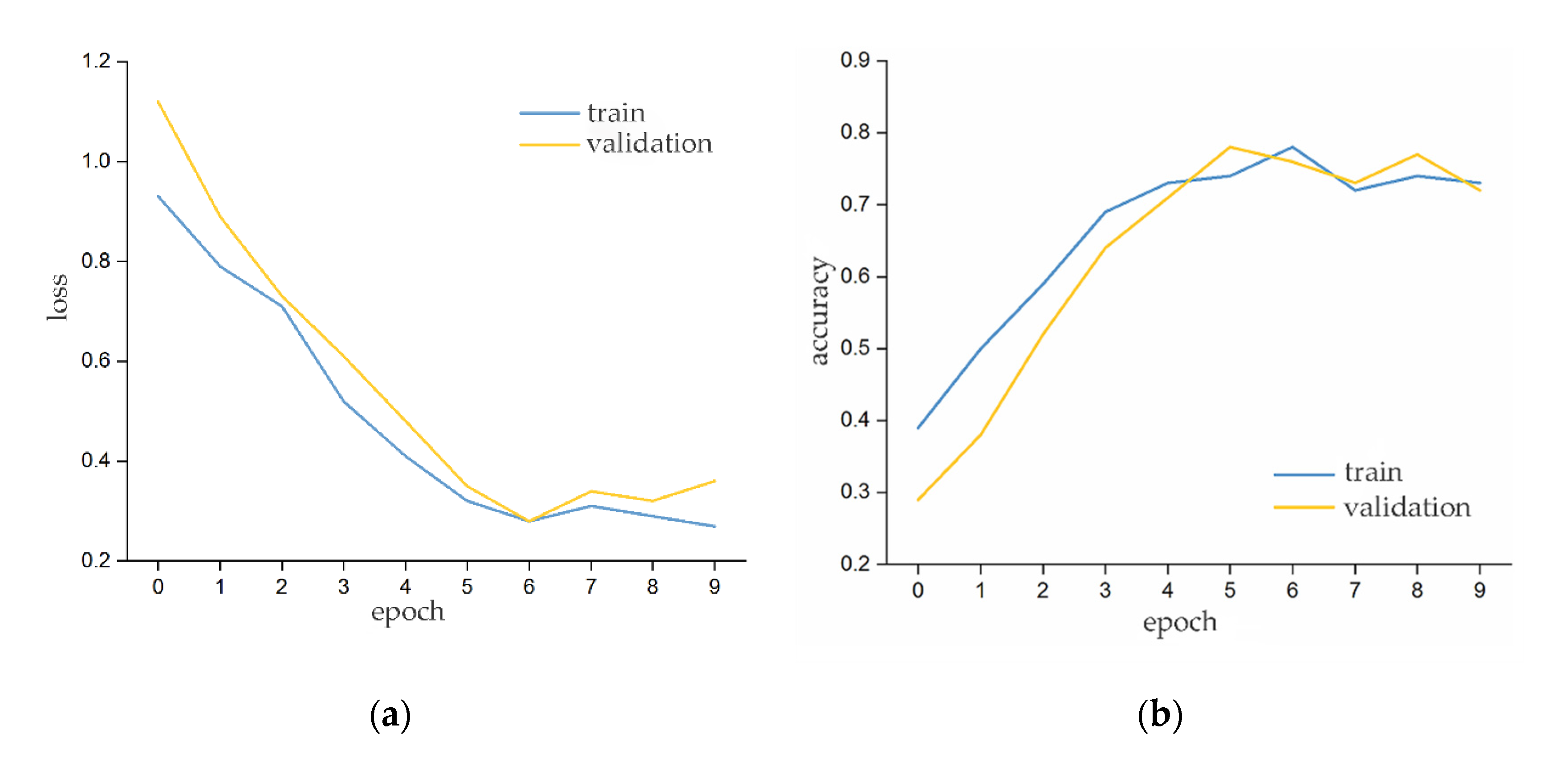
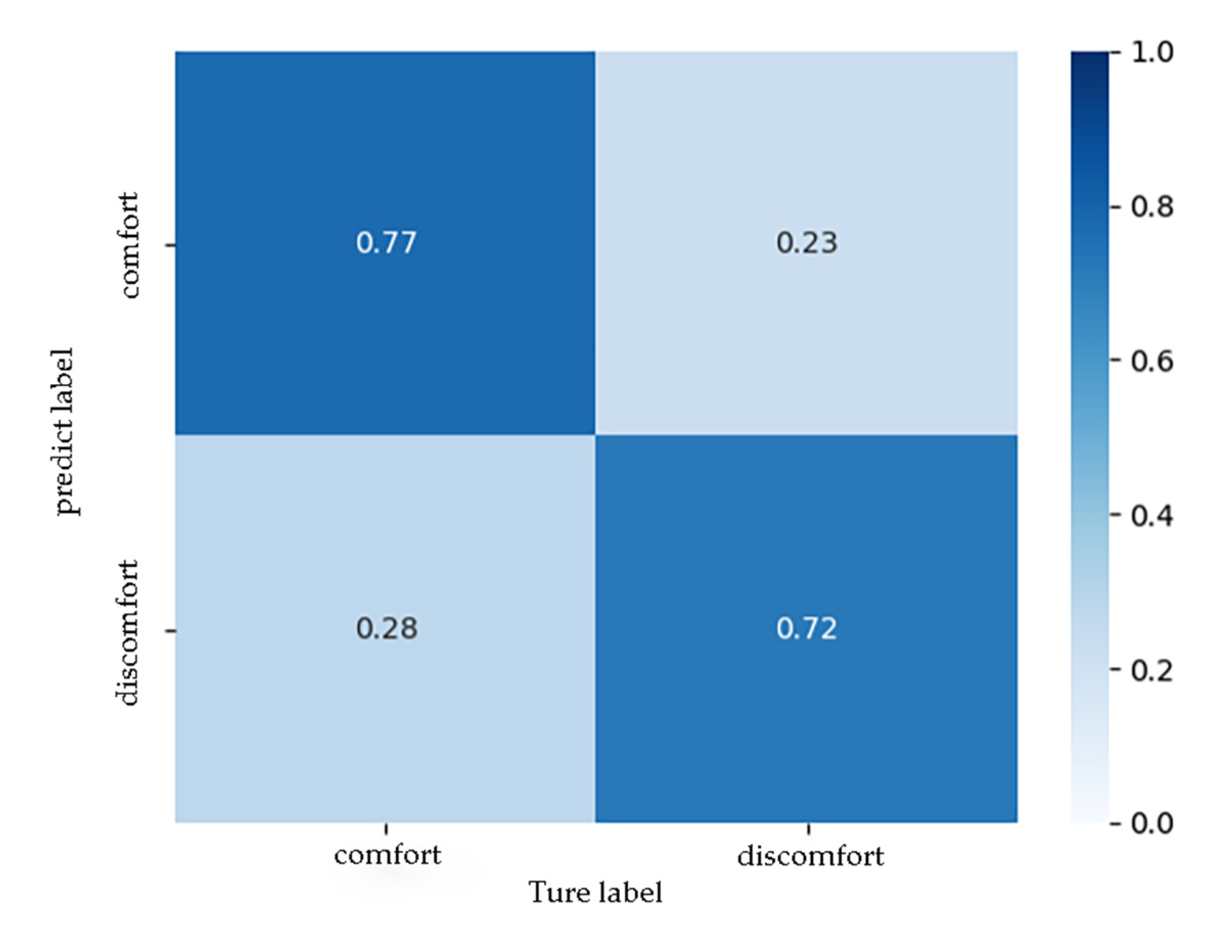
4.3. Model Prediction Results
5. Conclusions
6. Limitations and Future Works
- (1)
- Increasing the number of subjects to validate the reliability of our model;
- (2)
- Increasing the number of motion conditions, such as lane changing or overtaking, to explore the comfort of passengers under these typical conditions;
- (3)
- Carrying out autonomous vehicle trials to explore the comfort of autonomous vehicles in the future;
- (4)
- Considering the difference of passenger posture changes under different vehicle motion states and exploring the influence of this factor on passenger comfort evaluation.
Author Contributions
Funding
Conflicts of Interest
References
- Paddeu, D.; Parkhurst, G.; Shergold, I. Passenger comfort and trust on first-time use of a shared autonomous shuttle vehicle. Trans. Res. Part C Emerg. Technol. 2020, 115, 102604. [Google Scholar] [CrossRef]
- Schmidt, E.A.; Kuiper, O.X.; Wolter, S.; Diels, C.; Bos, J.E. An international survey on the incidence and modulating factors of carsickness. Trans. Res. Part F Traffic Psychol. Behav. 2020, 71, 76–87. [Google Scholar] [CrossRef]
- Floyd, W.F.; Roberts, D.F. Anatomical and physiological principles in chair and table design. Ergonomics 1958, 2, 1–16. [Google Scholar] [CrossRef]
- Lu, Z.; Li, S.; Felix, S.; Zhou, J.; Cheng, B. Driving comfort evaluation of passenger vehicles with natural language processing and improved AHP. J. Tsinghua Univ. Sci. Technol. 2016, 56, 137–143. [Google Scholar] [CrossRef]
- Xu, L.; Liu, Y. Evaluation Study of Public Traffic Comfort. J. Dalian Jiaotong Univ. 2017, 38, 31–37. [Google Scholar] [CrossRef]
- Roman, C.; Martin, J.C.; Espino, R. Using Stated Preferences to Analyze the Service Quality of Public Transport. Int. J. Sustain. Trans. 2014, 8, 28–46. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. A Survey of Public Opinion about Autonomous and Self-Driving Vehiclesin the U.S., The U.K., and Australia; The University of Michigan Transportation Research Institute: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Hoberock, L.L. A Survey of Longitudinal Acceleration Comfort Studies in Ground Transportation Vehicles. J. Dyn. Syst. Measur. Control Trans. Asme 1977, 99, 76–84. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. Public Opinion about Self-Driving Vehicles in China, India, Japan, the US, the UK, and Australia; University of Michigan, Ann Arbor, Transportation Research Institute: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Bellem, H.; Thiel, B.; Schrauf, M.; Krems, J.F. Comfort in automated driving: An analysis of preferences for different automated driving styles and their dependence on personality traits. Trans. Res. Part F Traffic Psychol. Behav. 2018, 55, 90–100. [Google Scholar] [CrossRef]
- Kamijo, K.; Tsujimura, H.; Obara, H.; Katsumata, M. Evaluation of seating comfort. SAE Trans. 1982, 2615–2620. [Google Scholar] [CrossRef]
- Kim, Y.Y.; Kim, H.J.; Kim, E.N.; Ko, H.; Kim, H.T. Characteristic changes in the physiological components of cybersickness. Psychophysiology 2005, 42, 616–625. [Google Scholar] [CrossRef]
- Min, B.; Chung, S.; Min, Y.; Sakamoto, K. Psychophysiological evaluation of simulator sickness evoked by a graphic simulator. Appl. Ergon. 2004, 35, 549–556. [Google Scholar] [CrossRef] [PubMed]
- Hu, S.; Grant, W.F.; Stern, R.M.; Koch, K.L. Motion sickness severity and physiological correlates during repeated exposures to a rotating optokinetic drum. Aviat. Space Environ. Med. 1991, 62, 308–314. [Google Scholar] [PubMed]
- Liu, R.; Peli, E.; Hwang, A.D. Measuring visually induced motion sickness using wearable devices. Electr. Imag. 2017, 2017, 218–223. [Google Scholar] [CrossRef]
- Yang, X.; Wang, D.; Hu, H.; Yue, K. P-31: Visual fatigue assessment and modeling based on ECG and EOG caused by 2D and 3D displays. In Proceedings of the SID Symposium Digest of Technical Papers; SID: San Jose, CA, USA, 2016; pp. 1237–1240. [Google Scholar]
- Himi, N.; Koga, T.; Nakamura, E.; Kobashi, M.; Yamane, M.; Tsujioka, K. Differences in autonomic responses between subjects with and without nausea while watching an irregularly oscillating video. Auto. Neurosci. Basic Clin. 2004, 116, 46–53. [Google Scholar] [CrossRef]
- Powell, J.P.; Palacín, R. Passenger Stability within Moving Railway Vehicles: Limits on Maximum Longitudinal Acceleration. Urban Rail. Transit. 2015, 1, 95–103. [Google Scholar] [CrossRef]
- Koslucher, F.; Haaland, E.; Malsch, A.; Webeler, J.; Stoffregen, T.A. Sex Differences in the Incidence of Motion Sickness Induced by Linear Visual Oscillation. Aerospace Med. Human Perform. 2015, 86, 787–793. [Google Scholar] [CrossRef]
- Ahmadpour, N.; Robert, J.; Lindgaard, G. Aircraft passenger comfort experience: Underlying factors and differentiation from discomfort. Appl. Ergon. 2016, 52, 301–308. [Google Scholar] [CrossRef]
- Wang, P.W.; Wang, L.; Li, Y.H.; Guo, W.W. Improved Cooperative Collision Avoidance (CCA) Model Considering Driver Comfort. Int. J. Automot. Technol. 2015, 16, 989–996. [Google Scholar] [CrossRef]
- Lee, J.; Litkouhi, B.B. A unified framework of the automated lane centering/changing control for motion smoothness adaptation. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; pp. 282–287. [Google Scholar]
- Heil, T.; Lange, A.; Cramer, S. Adaptive and efficient lane change path planning for automated vehicles. In Proceedings of the International Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 1–4 November 2016; pp. 479–484. [Google Scholar]
- Artunedo, A.; Godoy, J.; Villagra, J. Smooth path planning for urban autonomous driving using OpenStreetMaps. In Proceedings of the IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017; pp. 837–842. [Google Scholar]
- Villagra, J.; Milanes, V.; Perez, J.; Godoy, J. Smooth path and speed planning for an automated public transport vehicle. Robot. Auto. Syst. 2012, 60, 252–265. [Google Scholar] [CrossRef]
- Salter, S.; Diels, C.; Herriotts, P.; Kanarachos, S.; Thake, D. Motion sickness in automated vehicles with forward and rearward facing seating orientations. Appl. Ergon. 2019, 78, 54–61. [Google Scholar] [CrossRef]
- Johnson, D.A.; Trivedi, M.M. Driving style recognition using a smartphone as a sensor platform. In Proceedings of the International Conference on Intelligent Transportation Systems, Washington, DC, USA, 5–7 October 2011; pp. 1609–1615. [Google Scholar]
- Golding, J.F. Motion sickness susceptibility. Auton. Neurosci. 2006, 129, 67–76. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Li, S.; Li, C.; Shen, B. Lateral Acceleration Characteristics of Curves with Small Radius on Two-lane Highway. J. Beijing Univ. Technol. 2019, 45, 452–458. [Google Scholar]
- Xu, J.; Yang, K.; Shao, Y. Ride Comfort of Passenger Cars on Two-Lane Mountain Highways Based on Tri-axial Acceleration from Field Driving Tests. Int. J. Civ. Eng. 2018, 16, 335–351. [Google Scholar] [CrossRef]
- Chang, X.; Rong, J.; Zhou, C.; Li, H. Relationship between driver’s feeling and vehicle operating characteristics on urban road. In Proceedings of the World Congress on Intelligent Control and Automation, Guilin, China, 12–15 June 2016; pp. 3033–3037. [Google Scholar]
- Chen, M. Modular Design of Passenger Car Seat Based on Safety and Comfort Analysis. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2016. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural. Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Graves, A.; Schmidhuber, J. Framewise phoneme classification with bidirectional LSTM and other neural network architectures. Neural. Netw. 2005, 18, 602–610. [Google Scholar] [CrossRef]
- He, Y.; Yan, X.; Wu, C.; Chu, D.; Peng, L. Effects of Driver’s Unsafe Acceleration Behaviors on Passengers’ Comfort for Coach Buses. In Proceedings of the International Conference on Transportation Information and Safety, Wuhan, China, 25–28 June 2015; pp. 1649–16551. [Google Scholar]
- De Looze, M.P.; Kuijtevers, L.F.M.; Van Dieen, J.H. Sitting comfort and discomfort and the relationships with objective measures. Ergonomics 2003, 46, 985–997. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | B | S.E. | Walds | Sig. | Exp(B) | Exp(B) 95% Confidence Interval | |
|---|---|---|---|---|---|---|---|
| Lower Limit | Upper Limit | ||||||
| Acceleration | 16.963 | 4.814 | 12.416 | 0.000 | 2.3 × 107 | 1.9 × 103 | 2.9 × 1011 |
| Motion sickness susceptibility | −1.563 | 0.481 | 10.564 | 0.001 | 0.210 | 0.082 | 0.538 |
| Constant | −4.077 | 0.724 | 31.715 | 0.000 | 0.017 | ||
| Category | Input Variables |
|---|---|
| A | vehicle motion state, longitudinal acceleration, lateral acceleration |
| B | vehicle motion state, longitudinal jerk, lateral jerk |
| C | vehicle motion state, longitudinal acceleration, lateral acceleration, longitudinal jerk, lateral jerk |
| Input Variables | Precision | Recall | F1 Score |
|---|---|---|---|
| Parameter combination A | 76.7% | 73.1% | 0.75 |
| Parameter combination B | 71.8% | 66.7% | 0.69 |
| Parameter combination C | 80.6% | 76.9% | 0.79 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Zhao, X.; Fu, R.; Li, Z. Research on the Comfort of Vehicle Passengers Considering the Vehicle Motion State and Passenger Physiological Characteristics: Improving the Passenger Comfort of Autonomous Vehicles. Int. J. Environ. Res. Public Health 2020, 17, 6821. https://doi.org/10.3390/ijerph17186821
Wang C, Zhao X, Fu R, Li Z. Research on the Comfort of Vehicle Passengers Considering the Vehicle Motion State and Passenger Physiological Characteristics: Improving the Passenger Comfort of Autonomous Vehicles. International Journal of Environmental Research and Public Health. 2020; 17(18):6821. https://doi.org/10.3390/ijerph17186821
Chicago/Turabian StyleWang, Chang, Xia Zhao, Rui Fu, and Zhen Li. 2020. "Research on the Comfort of Vehicle Passengers Considering the Vehicle Motion State and Passenger Physiological Characteristics: Improving the Passenger Comfort of Autonomous Vehicles" International Journal of Environmental Research and Public Health 17, no. 18: 6821. https://doi.org/10.3390/ijerph17186821
APA StyleWang, C., Zhao, X., Fu, R., & Li, Z. (2020). Research on the Comfort of Vehicle Passengers Considering the Vehicle Motion State and Passenger Physiological Characteristics: Improving the Passenger Comfort of Autonomous Vehicles. International Journal of Environmental Research and Public Health, 17(18), 6821. https://doi.org/10.3390/ijerph17186821