A Multicriteria Model for the Assessment of Countries’ Environmental Performance


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Source
2.2. Basics on Goal Programming
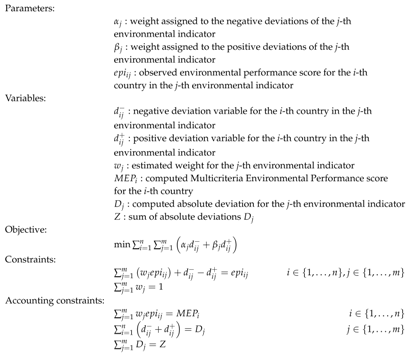
2.3. Measuring Environmental Performance through a Goal Programming Model


3. Empirical Results
3.1. Descriptive Statistics
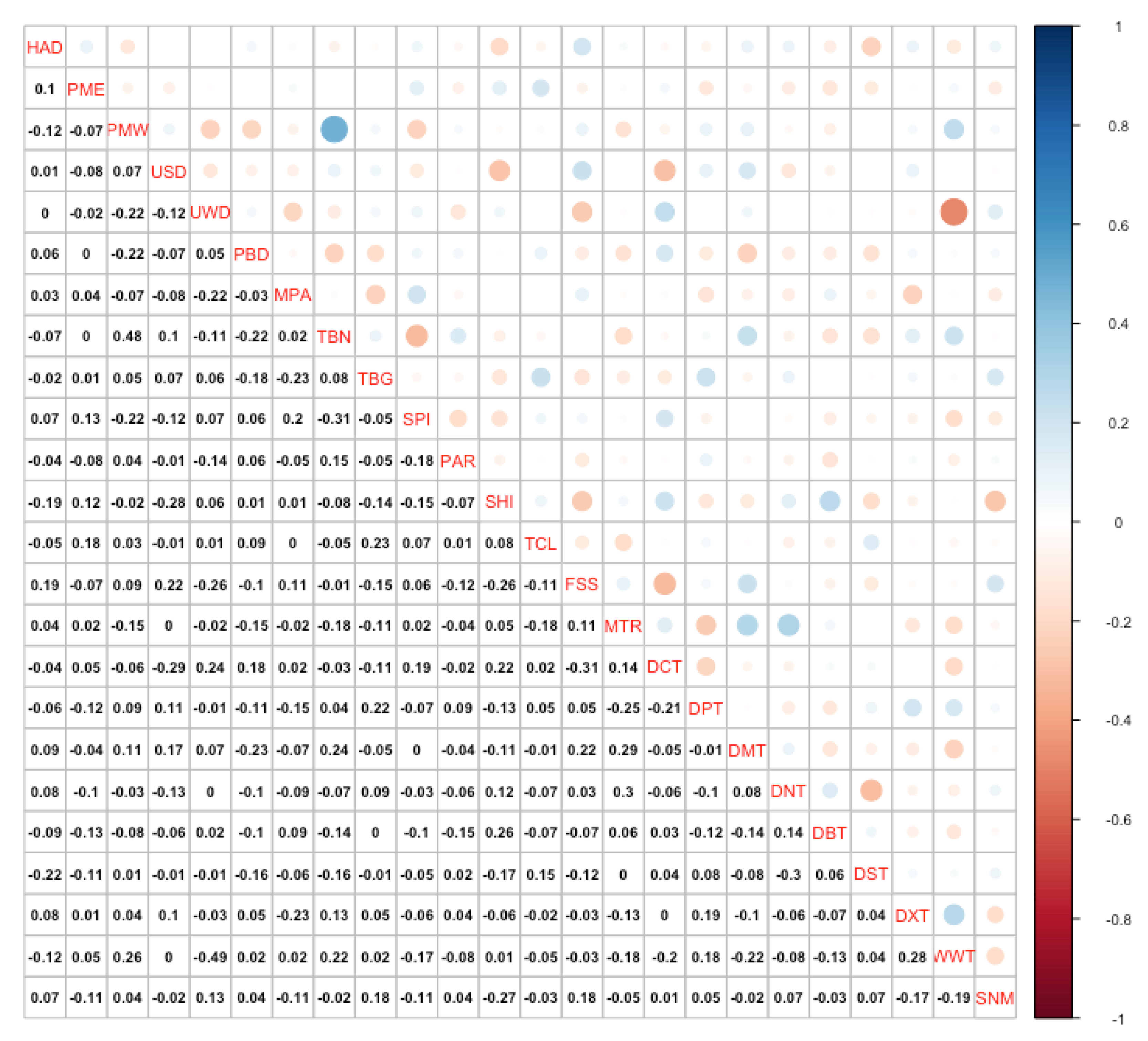
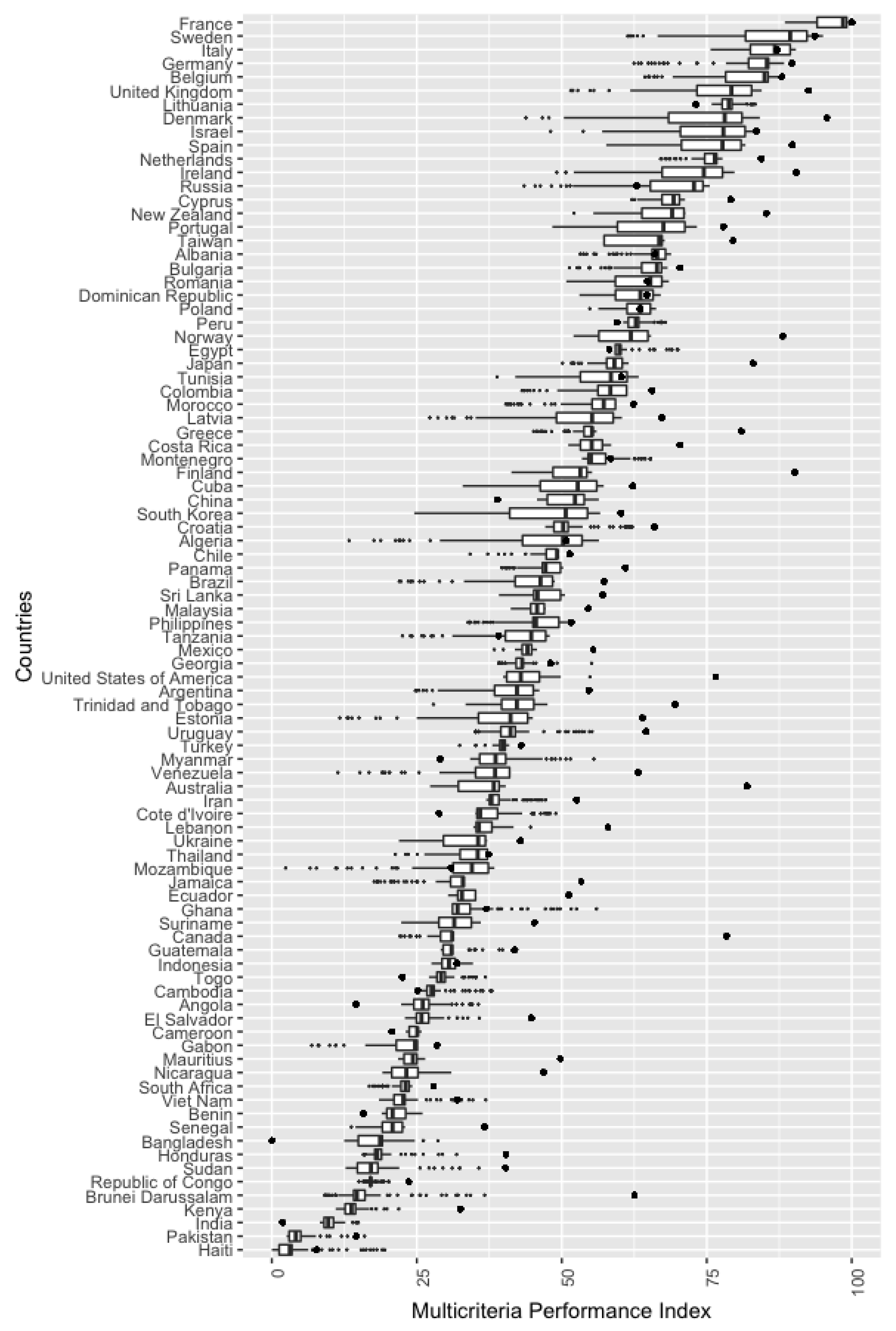
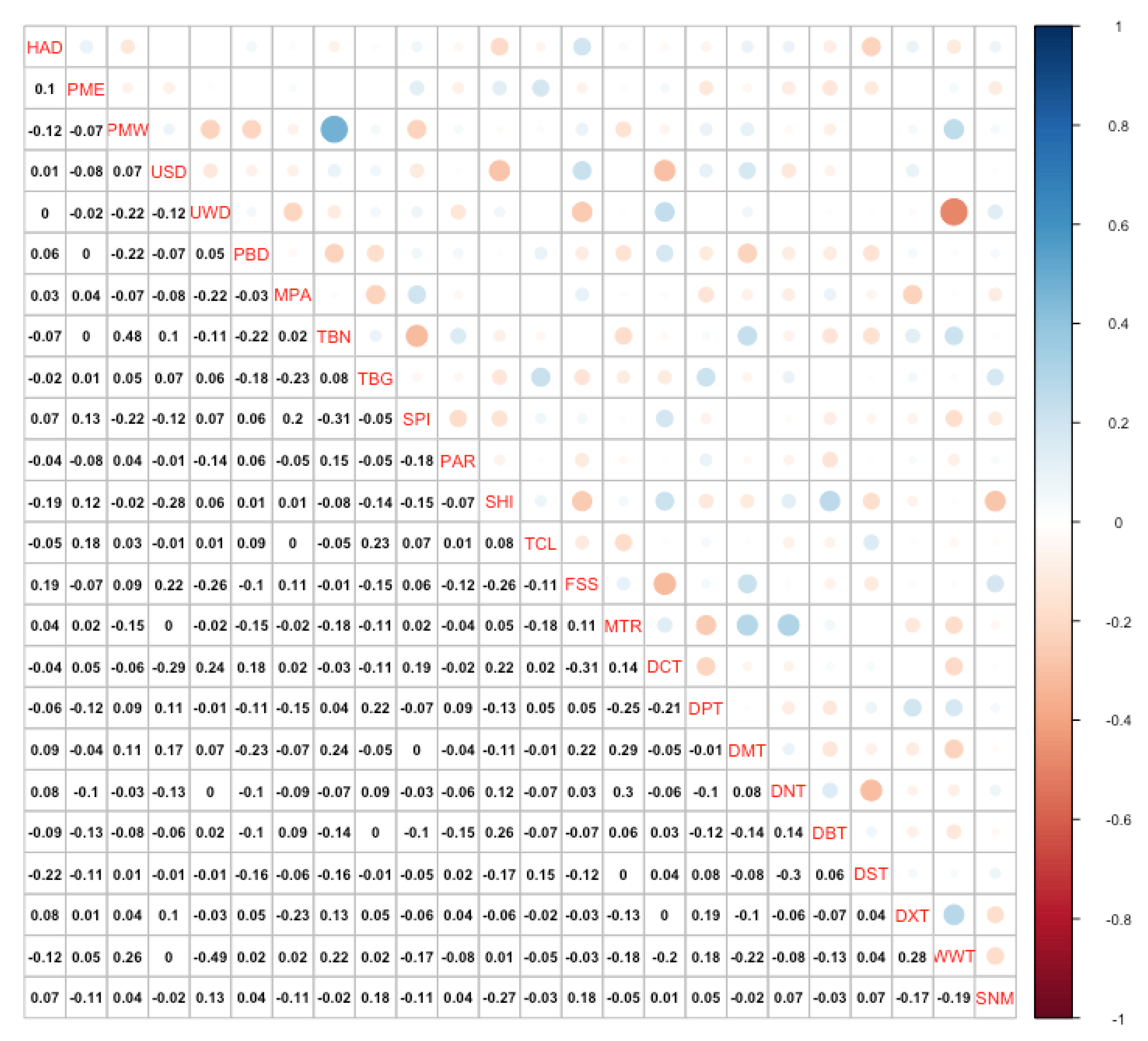
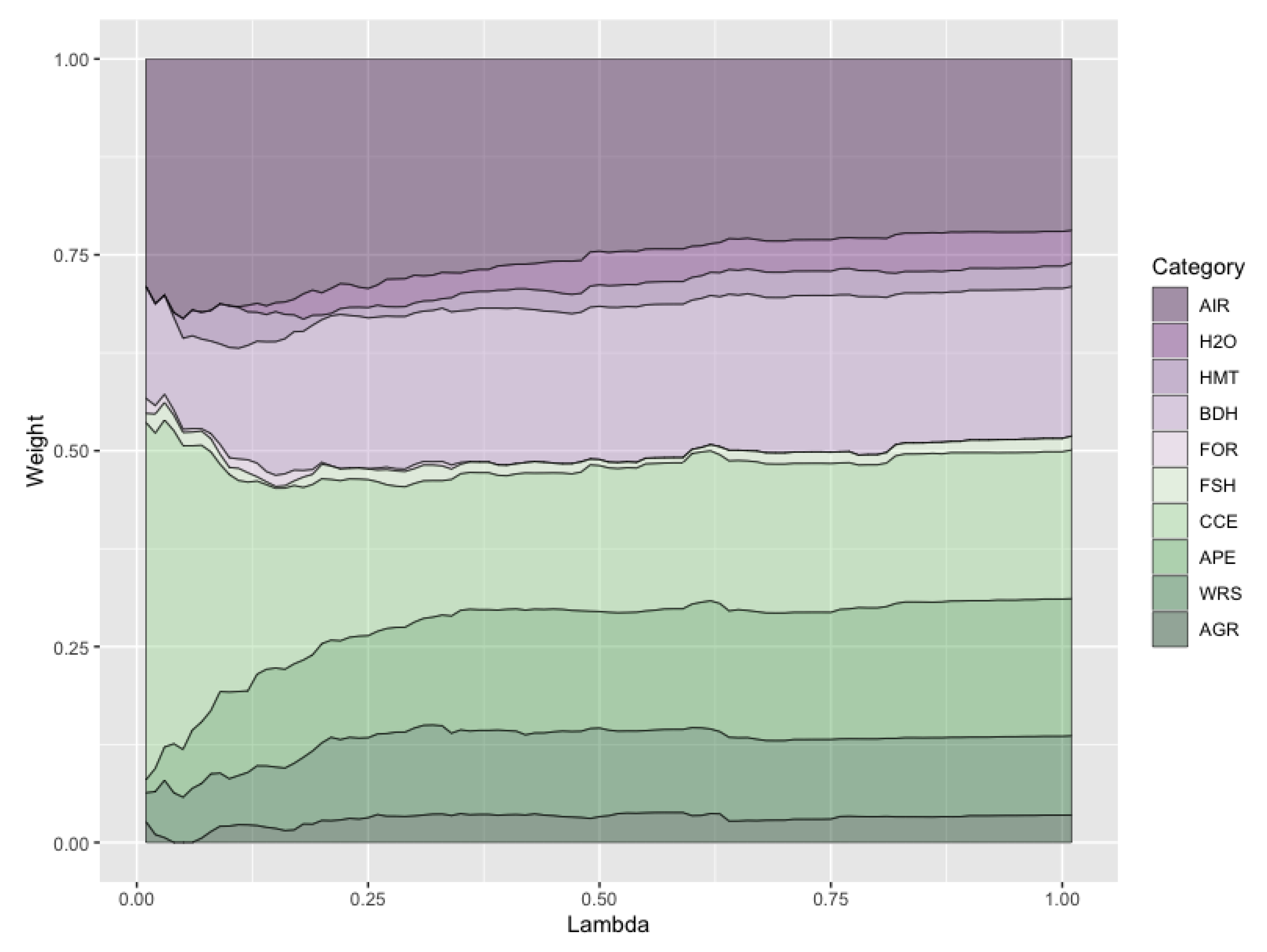
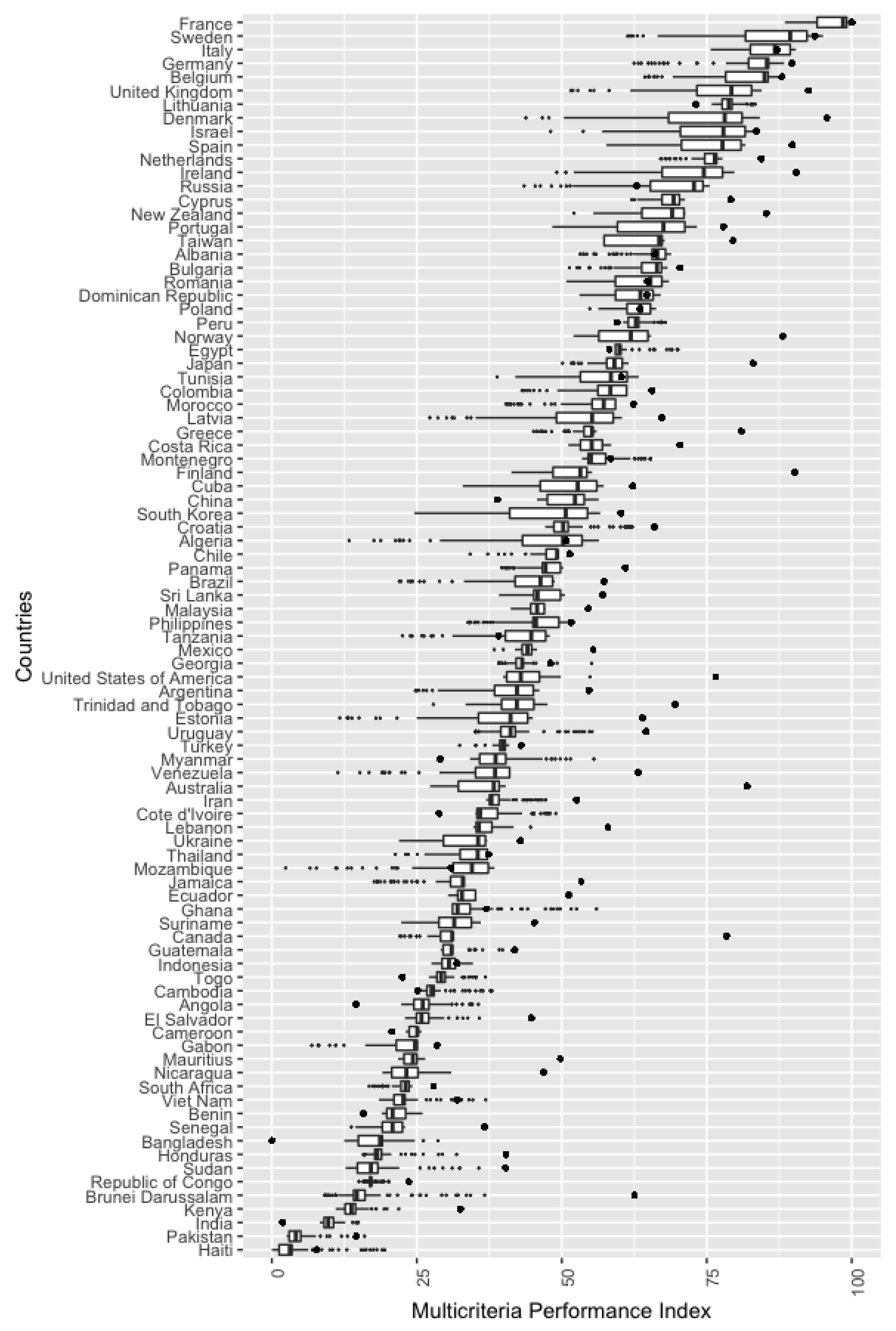
3.2. Assessing Multicriteria Environmental Performance
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DM | Decision Maker |
| EPI | Environmental Performance Index |
| GP | Goal Programming |
| MEP | Multicriteria Environmental Performance |
| WGP | Weighted Goal Programming |
| WHO | World Health Organization |
References
- Hamilton, L.C. Education, politics and opinions about climate change evidence for interaction effects. Clim. Chang. 2011, 104, 231–242. [Google Scholar] [CrossRef]
- Li, Y.; Qin, Y. The Response of Net Primary Production to Climate Change: A Case Study in the 400 mm Annual Precipitation Fluctuation Zone in China. Int. J. Environ. Res. Public Health 2019, 16, 1497. [Google Scholar] [CrossRef] [PubMed]
- McMichael, A.J.; Woodruff, R.E.; Hales, S. Climate change and human health: present and future risks. Lancet 2006, 367, 859–869. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, B.; Zhou, D.; Wu, Z.; Wang, T. Asymmetric Soil Warming under Global Climate Change. Int. J. Environ. Res. Public Health 2019, 16, 1504. [Google Scholar] [CrossRef] [PubMed]
- Pachauri, R.K.; Allen, M.R.; Barros, V.R.; Broome, J.; Cramer, W.; Christ, R.; Church, J.A.; Clarke, L.; Dahe, Q.; Dasgupta, P.; et al. Climate Change 2014: Synthesis Report; Contribution of Working Groups I, II and III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2014. [Google Scholar]
- Short, F.T.; Kosten, S.; Morgan, P.A.; Malone, S.; Moore, G.E. Impacts of climate change on submerged and emergent wetland plants. Aquat. Bot. 2016, 135, 3–17. [Google Scholar] [CrossRef]
- Lynch, A.J.; Myers, B.J.; Chu, C.; Eby, L.A.; Falke, J.A.; Kovach, R.P.; Krabbenhoft, T.J.; Kwak, T.J.; Lyons, J.; Paukert, C.P.; et al. Climate change effects on North American inland fish populations and assemblages. Fisheries 2016, 41, 346–361. [Google Scholar] [CrossRef]
- Wang, Z.X.; Hao, P.; Yao, P.Y. Non-linear relationship between economic growth and CO2 emissions in China: An empirical study based on panel smooth transition regression models. Int. J. Environ. Res. Public Health 2017, 14, 1568. [Google Scholar] [CrossRef]
- Wendling, Z.A.; Emerson, J.W.; Esty, D.C.; Levy, M.A.; de Sherbinin, A.; Emerson, J.W. 2018 Environmental Performance Index; Yale Center for Environmental Law & Policy: New Haven, CT, USA, 2018. [Google Scholar]
- Bandura, R. A Survey of Composite Indices Measuring Country Performance: 2008 Update; UNDP/ODS Working Paper; United Nations Development Programme, Office of Development Studies: New York, NY, USA, 2008.
- Greco, S.; Ishizaka, A.; Tasiou, M.; Torrisi, G. On the methodological framework of composite indices: A review of the issues of weighting, aggregation, and robustness. Soc. Indic. Res. 2019, 141, 61–94. [Google Scholar] [CrossRef]
- Joint Research Centre, European Commission. Handbook on Constructing Composite Indicators: Methodology and User Guide; OECD Publishing: Paris, France, 2008. [Google Scholar]
- Biggeri, M.; Clark, D.A.; Ferrannini, A.; Mauro, V. Tracking the SDGs in an ‘integrated’ manner: A proposal for a new index to capture synergies and trade-offs between and within goals. World Dev. 2019, 122, 628–647. [Google Scholar] [CrossRef]
- Munda, G.; Nardo, M. Noncompensatory/nonlinear composite indicators for ranking countries: a defensible setting. Appl. Econ. 2009, 41, 1513–1523. [Google Scholar] [CrossRef] [Green Version]
- Munda, G. Choosing aggregation rules for composite indicators. Soc. Indic. Res. 2012, 109, 337–354. [Google Scholar] [CrossRef]
- Ding, Y.; Fu, Y.; Lai, K.K.; Leung, W.J. Using ranked weights and acceptability analysis to construct composite indicators: A case study of regional sustainable society index. Soc. Indic. Res. 2018, 139, 871–885. [Google Scholar] [CrossRef]
- Zhou, P.; Ang, B.; Poh, K. A mathematical programming approach to constructing composite indicators. Ecol. Econ. 2007, 62, 291–297. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W.; Rhodes, E. Measuring the efficiency of decision making units. Eur. J. Oper. Res. 1978, 2, 429–444. [Google Scholar] [CrossRef]
- Zhou, L.; Tokos, H.; Krajnc, D.; Yang, Y. Sustainability performance evaluation in industry by composite sustainability index. Clean Technol. Environ. Policy 2012, 14, 789–803. [Google Scholar] [CrossRef]
- García, F.; Guijarro, F.; Moya, I. A goal programming approach to estimating performance weights for ranking firms. Comput. Oper. Res. 2010, 37, 1597–1609. [Google Scholar] [CrossRef]
- García, F.; Guijarro, F.; Moya, I. Ranking Spanish savings banks: A multicriteria approach. Math. Comput. Model. 2010, 52, 1058–1065. [Google Scholar] [CrossRef]
- García-Martínez, G.; Guijarro, F.; Poyatos, J.A. Measuring the social responsibility of European companies: A goal programming approach. Int. Trans. Oper. Res. 2019, 26, 1074–1095. [Google Scholar] [CrossRef]
- Guijarro, F.; Poyatos, J.A. Designing a sustainable development goal index through a goal programming model: The Case of EU-28 Countries. Sustainability 2018, 10, 3167. [Google Scholar] [CrossRef]
- Juwana, I.; Muttil, N.; Perera, B. Indicator-based water sustainability assessment—A review. Sci. Total Environ. 2012, 438, 357–371. [Google Scholar] [CrossRef]
- Wiréhn, L.; Danielsson, Å.; Neset, T.S.S. Assessment of composite index methods for agricultural vulnerability to climate change. J. Environ. Manag. 2015, 156, 70–80. [Google Scholar] [CrossRef] [PubMed]
- Charnes, A.; Cooper, W.W.; Ferguson, R.O. Optimal estimation of executive compensation by linear programming. Manag. Sci. 1955, 1, 138–151. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W. Management Models and Industrial Applications of Linear Programming; Wiley: Hoboken, NJ, USA, 1961. [Google Scholar]
- Tamiz, M.; Jones, D.; Romero, C. Goal programming for decision making: An overview of the current state-of-the-art. Eur. J. Oper. Res. 1998, 111, 569–581. [Google Scholar] [CrossRef]
- Linares, P.; Romero, C. Aggregation of preferences in an environmental economics context: A goal-programming approach. Omega 2002, 30, 89–95. [Google Scholar] [CrossRef]
- Romero, C. Extended lexicographic goal programming: a unifying approach. Omega 2001, 29, 63–71. [Google Scholar] [CrossRef]
- Jones, D.; Tamiz, M. Practical Goal Programming; Springer: New York, NY, USA, 2010; Volume 141. [Google Scholar]
- Schniederjans, M. Goal Programming: Methodology and Applications: Methodology and Applications; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Romero, C. Handbook of Critical Issues in Goal Programming; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Dunlap, R.E.; Mertig, A.G. Global concern for the environment: is affluence a prerequisite? J. Soc. Issues 1995, 51, 121–137. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| Policy Objective | TLA | Weight | Issue Category | TLA | Weight | Indicator | TLA | Weight | w |
|---|---|---|---|---|---|---|---|---|---|
| Environmental Health | HLT | 40% | Air Quality | AIR | 65% | Household Solid Fuels | HAD | 40% | 10.4% |
| PM2.5 Exposure | PME | 30% | 7.8% | ||||||
| PM2.5 Exceedance | PMW | 30% | 7.8% | ||||||
| Water & Sanitation | H2O | 30% | Drinking Water | UWD | 50% | 6.0% | |||
| Sanitation | USD | 50% | 6.0% | ||||||
| Heavy Metals | HMT | 5% | Lead Exposure | PBD | 100% | 2.0% | |||
| Ecosystem Vitality | ECO | 60% | Biodiversity & Habitat | BDH | 25% | Marine Protected Areas | MPA | 20% | 3.0% |
| Biome Protection (National) | TBN | 20% | 3.0% | ||||||
| Biome Protection (Global) | TBG | 20% | 3.0% | ||||||
| Species Protection Index | SPI | 20% | 3.0% | ||||||
| Representativeness Index | PAR | 10% | 1.5% | ||||||
| Species Habitat Index | SHI | 10% | 1.5% | ||||||
| Forests | FOR | 10% | Tree Cover Loss | TCL | 100% | 6.0% | |||
| Fisheries | FSH | 10% | Fish Stock Status | FSS | 50% | 3.0% | |||
| Regional Marine Trophic Index | MTR | 50% | 3.0% | ||||||
| Climate & Energy | CCE | 30% | CO2 Emissions – Total | DCT | 50% | 9.0% | |||
| CO2 Emissions – Power | DPT | 20% | 3.6% | ||||||
| Methane Emissions | DMT | 20% | 3.6% | ||||||
| N2O Emissions | DNT | 5% | 0.9% | ||||||
| Black Carbon Emissions | DBT | 5% | 0.9% | ||||||
| Air Pollution | APE | 10% | SO2 Emissions | DST | 50% | 3.0% | |||
| NOX Emissions | DXT | 50% | 3.0% | ||||||
| Water Resources | WRS | 10% | Wastewater Treatment | WWT | 100% | 6.0% | |||
| Agriculture | AGR | 5% | Sustainable Nitrogen Management | SNM | 100% | 3.0% |
| TLA | Mean | Sd | Median | Skewness | Kurtosis |
|---|---|---|---|---|---|
| HAD | 53.95 | 27.16 | 56.17 | −0.09 | −1.08 |
| PME | 59.04 | 33.55 | 63.43 | −0.30 | −1.26 |
| PMW | 58.85 | 30.47 | 58.83 | −0.12 | −1.21 |
| USD | 51.67 | 29.88 | 49.66 | 0.01 | −1.07 |
| UWD | 61.46 | 26.74 | 63.79 | −0.49 | −0.51 |
| PBD | 68.25 | 26.44 | 67.57 | −0.46 | −0.81 |
| MPA | 60.58 | 26.34 | 60.13 | −0.17 | −0.82 |
| TBN | 67.74 | 29.60 | 67.77 | −0.47 | −0.94 |
| TBG | 61.72 | 27.78 | 63.72 | −0.41 | −0.82 |
| SPI | 48.98 | 32.27 | 44.22 | 0.21 | −1.19 |
| PAR | 52.43 | 28.78 | 51.34 | −0.01 | −1.21 |
| SHI | 70.36 | 27.16 | 76.51 | −0.59 | −0.90 |
| TCL | 59.19 | 29.15 | 59.69 | −0.14 | −1.21 |
| FSS | 57.92 | 25.68 | 59.14 | −0.14 | −0.68 |
| MTR | 55.88 | 28.47 | 60.36 | −0.13 | −1.14 |
| DCT | 69.43 | 29.33 | 77.72 | −0.69 | −0.66 |
| DPT | 58.24 | 27.00 | 54.63 | −0.06 | −1.25 |
| DMT | 60.09 | 27.75 | 62.54 | −0.18 | −1.00 |
| DNT | 57.32 | 26.81 | 53.22 | 0.09 | −1.06 |
| DBT | 62.89 | 29.98 | 64.31 | −0.31 | −1.22 |
| DST | 66.77 | 29.17 | 71.26 | −0.59 | −0.80 |
| DXT | 54.90 | 28.39 | 53.08 | 0.03 | −0.98 |
| WWT | 60.22 | 29.92 | 61.03 | −0.33 | −1.05 |
| SNM | 57.44 | 28.65 | 57.15 | −0.18 | −0.93 |
| 0.0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.000 | 0.080 | 0.102 | 0.099 | 0.106 | 0.122 | 0.124 | 0.126 | 0.129 | 0.129 | 0.128 | |
| 0.291 | 0.219 | 0.146 | 0.128 | 0.114 | 0.084 | 0.073 | 0.055 | 0.047 | 0.041 | 0.040 | |
| 0.000 | 0.017 | 0.045 | 0.050 | 0.042 | 0.041 | 0.041 | 0.050 | 0.052 | 0.050 | 0.051 | |
| 0.000 | 0.001 | 0.032 | 0.032 | 0.027 | 0.016 | 0.007 | 0.007 | 0.004 | 0.005 | 0.000 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.004 | 0.027 | 0.031 | 0.033 | 0.040 | 0.041 | 0.042 | |
| 0.000 | 0.052 | 0.003 | 0.013 | 0.024 | 0.028 | 0.029 | 0.031 | 0.031 | 0.028 | 0.030 | |
| 0.030 | 0.028 | 0.024 | 0.023 | 0.036 | 0.044 | 0.045 | 0.045 | 0.048 | 0.047 | 0.047 | |
| 0.000 | 0.014 | 0.047 | 0.062 | 0.049 | 0.026 | 0.015 | 0.027 | 0.037 | 0.037 | 0.039 | |
| 0.000 | 0.015 | 0.015 | 0.003 | 0.022 | 0.040 | 0.053 | 0.043 | 0.033 | 0.036 | 0.033 | |
| 0.034 | 0.024 | 0.045 | 0.040 | 0.032 | 0.031 | 0.028 | 0.032 | 0.029 | 0.023 | 0.025 | |
| 0.079 | 0.060 | 0.061 | 0.065 | 0.061 | 0.056 | 0.048 | 0.053 | 0.051 | 0.048 | 0.046 | |
| 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.019 | 0.012 | 0.000 | 0.004 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.011 | 0.008 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.000 | 0.007 | 0.017 | 0.020 | 0.013 | 0.007 | 0.006 | 0.015 | 0.014 | 0.016 | 0.018 | |
| 0.071 | 0.043 | 0.040 | 0.039 | 0.039 | 0.041 | 0.044 | 0.041 | 0.043 | 0.044 | 0.045 | |
| 0.144 | 0.079 | 0.031 | 0.014 | 0.019 | 0.024 | 0.027 | 0.024 | 0.021 | 0.024 | 0.022 | |
| 0.042 | 0.015 | 0.045 | 0.042 | 0.070 | 0.057 | 0.058 | 0.057 | 0.054 | 0.061 | 0.057 | |
| 0.137 | 0.117 | 0.057 | 0.042 | 0.015 | 0.024 | 0.029 | 0.027 | 0.027 | 0.022 | 0.025 | |
| 0.062 | 0.015 | 0.033 | 0.039 | 0.030 | 0.038 | 0.034 | 0.041 | 0.038 | 0.038 | 0.040 | |
| 0.000 | 0.068 | 0.056 | 0.059 | 0.066 | 0.072 | 0.084 | 0.081 | 0.084 | 0.090 | 0.093 | |
| 0.017 | 0.039 | 0.068 | 0.077 | 0.090 | 0.078 | 0.076 | 0.081 | 0.084 | 0.084 | 0.082 | |
| 0.037 | 0.063 | 0.106 | 0.114 | 0.106 | 0.109 | 0.112 | 0.102 | 0.100 | 0.100 | 0.101 | |
| 0.027 | 0.023 | 0.028 | 0.035 | 0.036 | 0.034 | 0.035 | 0.030 | 0.033 | 0.034 | 0.035 | |
| 1980.0 | 1780.4 | 1694.4 | 1687.3 | 1671.4 | 1639.6 | 1638.4 | 1635.8 | 1630.7 | 1626.8 | 1631.2 | |
| 1980.0 | 2030.8 | 2099.5 | 2130.4 | 2172.6 | 2246.4 | 2278.1 | 2317.6 | 2331.7 | 2351.7 | 2358.3 | |
| 1980.0 | 1903.1 | 1846.9 | 1839.6 | 1861.4 | 1877.0 | 1886.4 | 1883.2 | 1879.5 | 1887.7 | 1890.6 | |
| 1980.0 | 1796.1 | 1773.0 | 1760.8 | 1775.1 | 1757.9 | 1762.8 | 1768.0 | 1764.8 | 1766.0 | 1772.3 | |
| 1980.0 | 1737.6 | 1706.6 | 1694.2 | 1690.2 | 1655.7 | 1654.8 | 1656.7 | 1648.3 | 1647.0 | 1651.1 | |
| 1980.0 | 1830.8 | 1868.0 | 1837.3 | 1820.9 | 1802.1 | 1797.4 | 1791.0 | 1788.5 | 1789.5 | 1785.6 | |
| 1980.0 | 1974.8 | 1935.5 | 1934.5 | 1915.1 | 1921.9 | 1926.1 | 1933.8 | 1933.5 | 1940.6 | 1941.3 | |
| 1980.0 | 1972.8 | 1976.9 | 2000.4 | 2000.0 | 2035.5 | 2046.9 | 2048.7 | 2056.4 | 2063.3 | 2064.1 | |
| 1980.0 | 1949.9 | 1970.9 | 1995.8 | 1989.7 | 2016.3 | 2020.6 | 2026.3 | 2034.3 | 2040.9 | 2041.2 | |
| 1980.0 | 1992.2 | 1957.6 | 1978.1 | 1984.4 | 1981.1 | 1985.0 | 1972.3 | 1978.2 | 1988.0 | 1984.2 | |
| 1980.0 | 1915.0 | 1890.6 | 1879.7 | 1864.9 | 1861.5 | 1865.8 | 1853.2 | 1855.0 | 1860.3 | 1863.2 | |
| 1980.0 | 1801.0 | 1827.3 | 1829.7 | 1835.2 | 1848.7 | 1856.0 | 1865.5 | 1869.3 | 1878.1 | 1878.0 | |
| 1980.0 | 1974.8 | 1950.5 | 1944.5 | 1962.8 | 1968.9 | 1973.2 | 1970.5 | 1973.8 | 1978.9 | 1978.5 | |
| 1980.0 | 2030.8 | 2099.5 | 2114.5 | 2120.1 | 2117.6 | 2114.9 | 2107.3 | 2109.5 | 2111.8 | 2109.9 | |
| 1980.0 | 1925.8 | 1912.4 | 1910.9 | 1917.1 | 1919.0 | 1917.6 | 1900.5 | 1903.1 | 1897.1 | 1892.7 | |
| 1980.0 | 2030.8 | 2024.0 | 2034.0 | 2020.4 | 2004.8 | 1991.5 | 1991.0 | 1990.1 | 1985.4 | 1981.1 | |
| 1980.0 | 2030.8 | 2099.5 | 2115.9 | 2107.2 | 2073.9 | 2064.3 | 2061.3 | 2062.6 | 2057.3 | 2057.2 | |
| 1980.0 | 1985.9 | 1911.8 | 1906.3 | 1874.5 | 1874.0 | 1864.5 | 1854.2 | 1853.5 | 1840.7 | 1841.9 | |
| 1980.0 | 2030.8 | 2099.5 | 2130.4 | 2164.7 | 2151.8 | 2145.6 | 2135.0 | 2135.8 | 2140.8 | 2138.7 | |
| 1980.0 | 1962.3 | 1894.8 | 1863.4 | 1846.7 | 1814.5 | 1801.6 | 1782.4 | 1778.7 | 1761.6 | 1759.0 | |
| 1980.0 | 1736.2 | 1672.5 | 1644.5 | 1614.9 | 1591.5 | 1568.1 | 1568.2 | 1560.9 | 1546.6 | 1543.8 | |
| 1980.0 | 1857.8 | 1765.0 | 1719.0 | 1693.5 | 1684.0 | 1671.2 | 1659.1 | 1650.4 | 1638.0 | 1635.7 | |
| 1980.0 | 1579.3 | 1472.0 | 1431.8 | 1412.6 | 1402.7 | 1398.1 | 1416.2 | 1414.2 | 1408.6 | 1409.2 | |
| 1980.0 | 1919.5 | 1880.9 | 1853.2 | 1840.7 | 1822.0 | 1813.4 | 1820.8 | 1811.7 | 1803.6 | 1801.2 | |
| Z | 47,519 | 45,749 | 45,330 | 45,236 | 45,156 | 45,068 | 45,042 | 45,019 | 45,014 | 45,010 | 45,010 |
| D | 1980.0 | 2030.8 | 2099.5 | 2130.4 | 2172.6 | 2246.4 | 2278.1 | 2317.6 | 2331.7 | 2351.7 | 2358.3 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guijarro, F. A Multicriteria Model for the Assessment of Countries’ Environmental Performance. Int. J. Environ. Res. Public Health 2019, 16, 2868. https://doi.org/10.3390/ijerph16162868
Guijarro F. A Multicriteria Model for the Assessment of Countries’ Environmental Performance. International Journal of Environmental Research and Public Health. 2019; 16(16):2868. https://doi.org/10.3390/ijerph16162868
Chicago/Turabian StyleGuijarro, Francisco. 2019. "A Multicriteria Model for the Assessment of Countries’ Environmental Performance" International Journal of Environmental Research and Public Health 16, no. 16: 2868. https://doi.org/10.3390/ijerph16162868
APA StyleGuijarro, F. (2019). A Multicriteria Model for the Assessment of Countries’ Environmental Performance. International Journal of Environmental Research and Public Health, 16(16), 2868. https://doi.org/10.3390/ijerph16162868