Gait Speed with Anti-Slip Devices on Icy Pedestrian Crossings Relate to Perceived Fall-Risk and Balance



Abstract
:1. Introduction
2. Materials and Methods
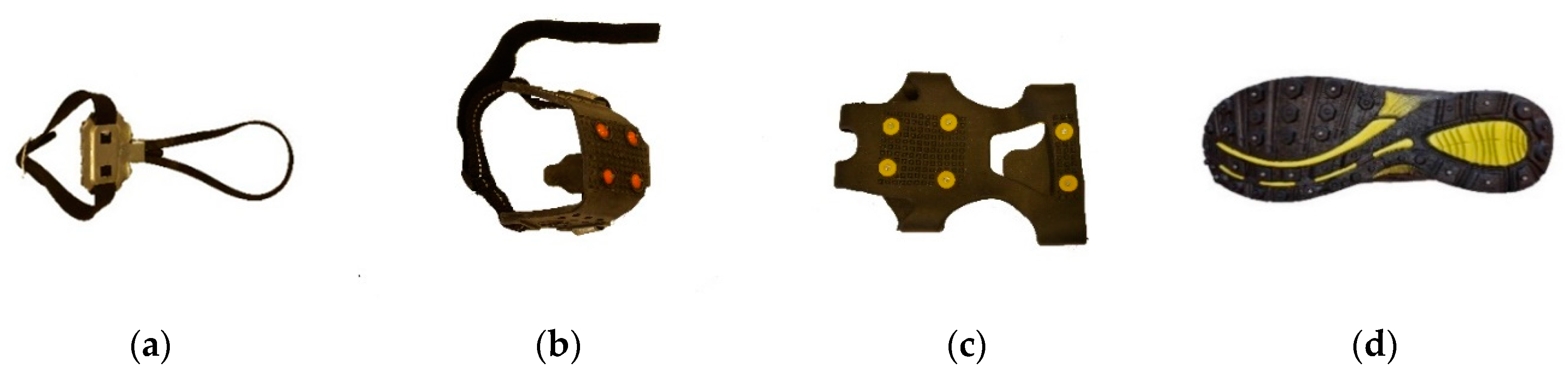
2.1. Anti-Slip Devices Tested
2.2. Measures of DCOF
2.3. Experimental Set-Up
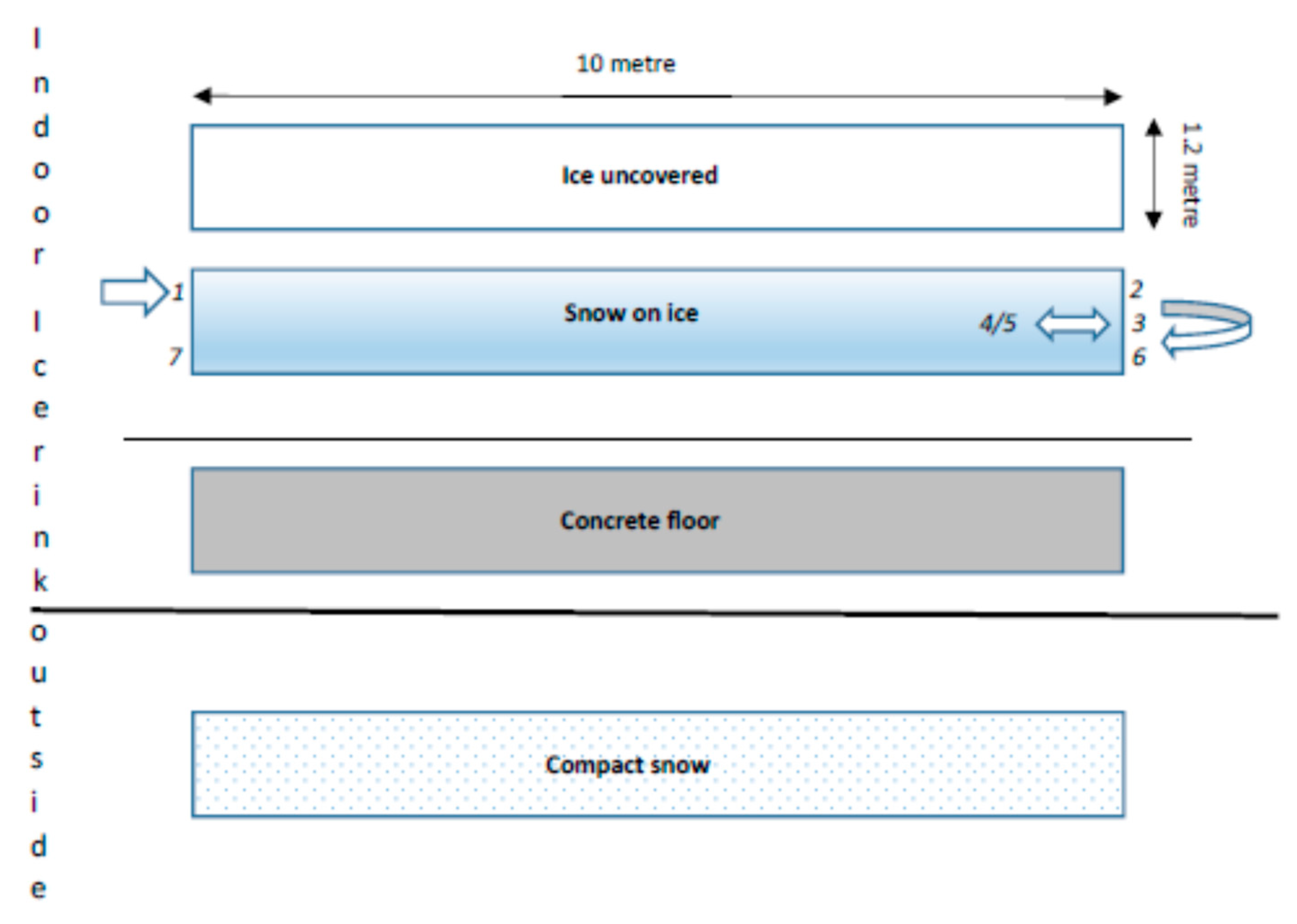
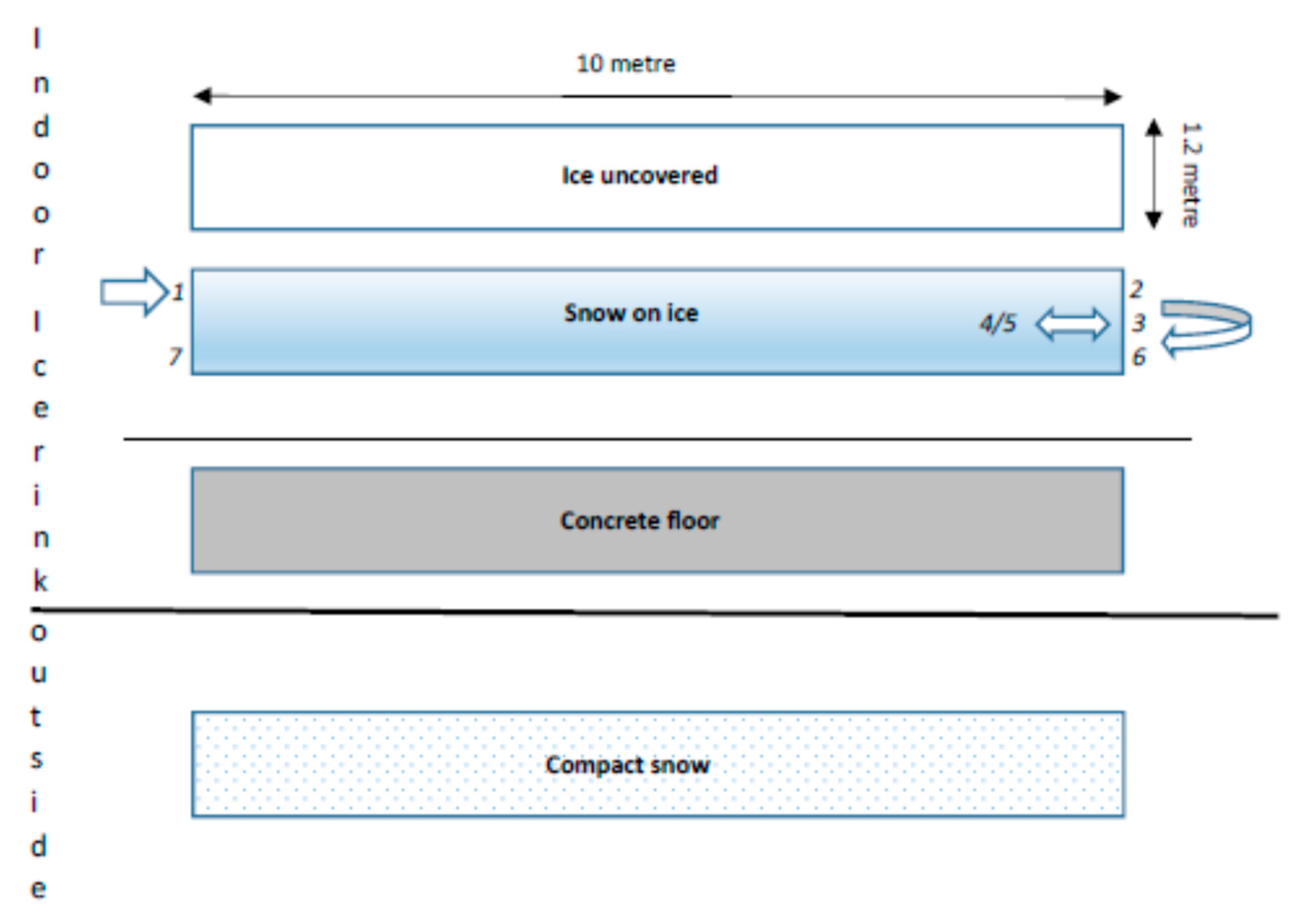
2.3.1. Test Tracks
2.3.2. Preconditions
2.3.3. Participants
2.4. Measurements
2.4.1. Background Gait Parameters of Participants
2.4.2. During the Experiment
2.5. Data Analysis
3. Results
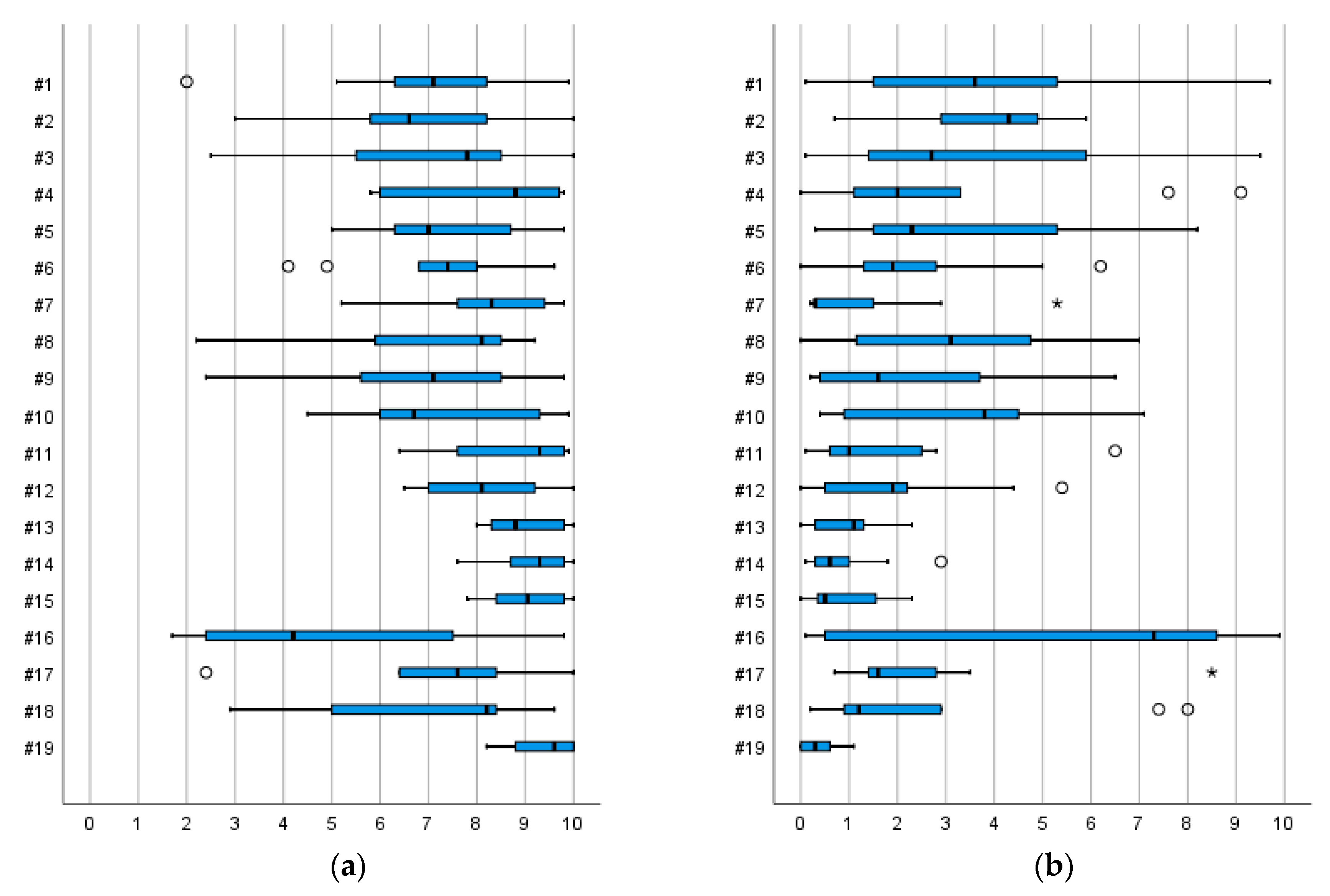
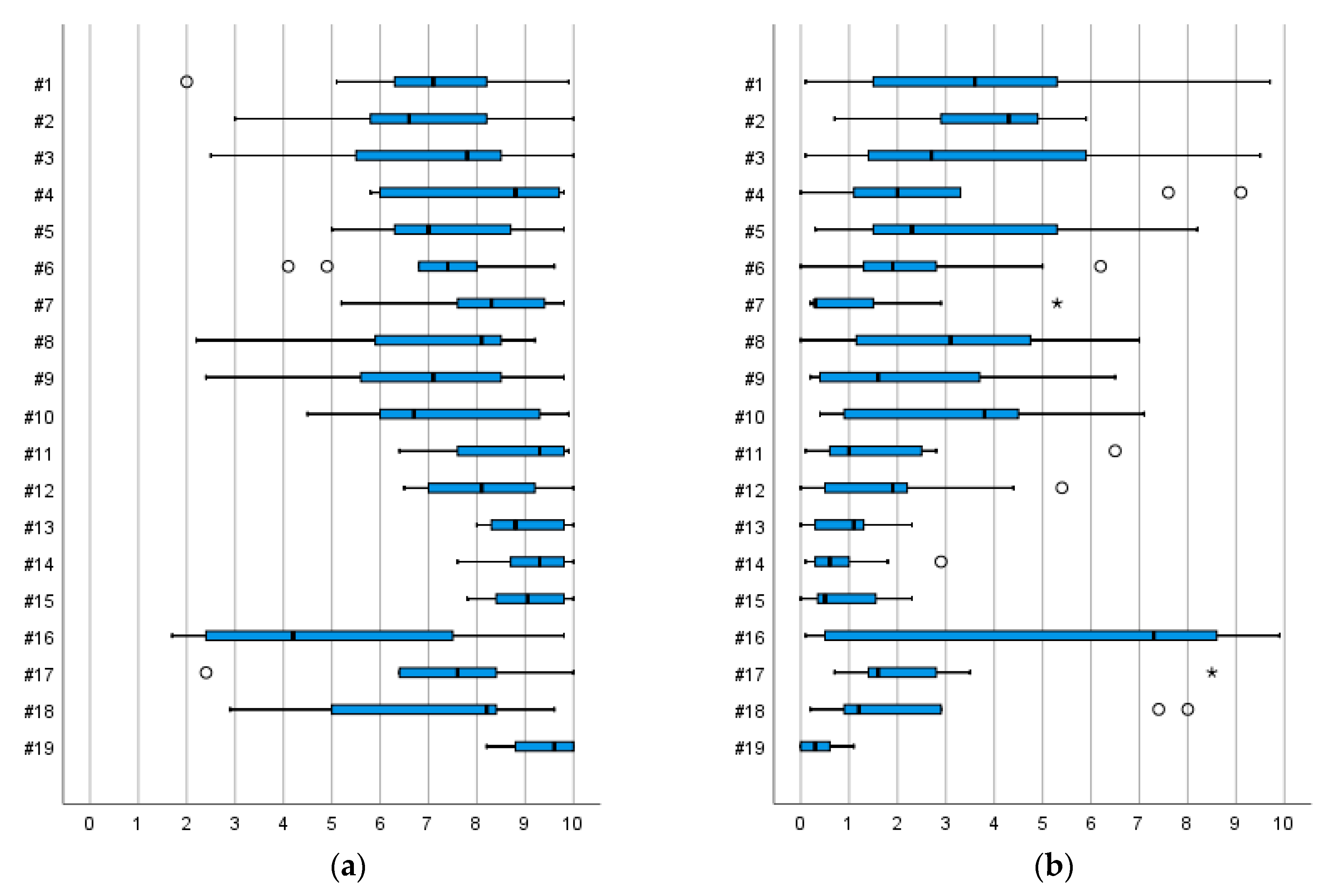
3.1. Pedestrian Ratings of Fall Risk, Balance, and Footfall Transitions on Uncovered Ice and Snow-Covered Ice with Different Anti-Slip Devices
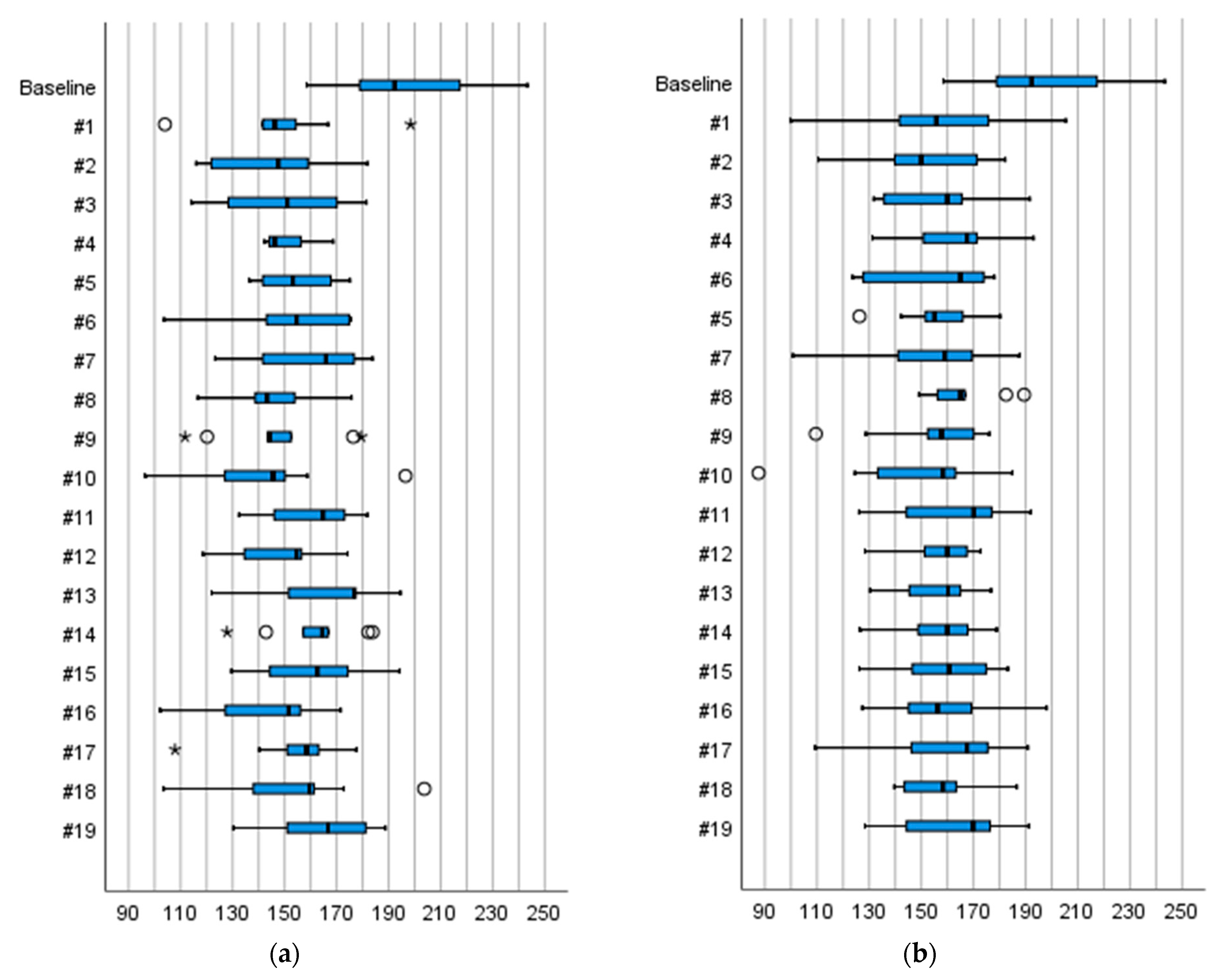
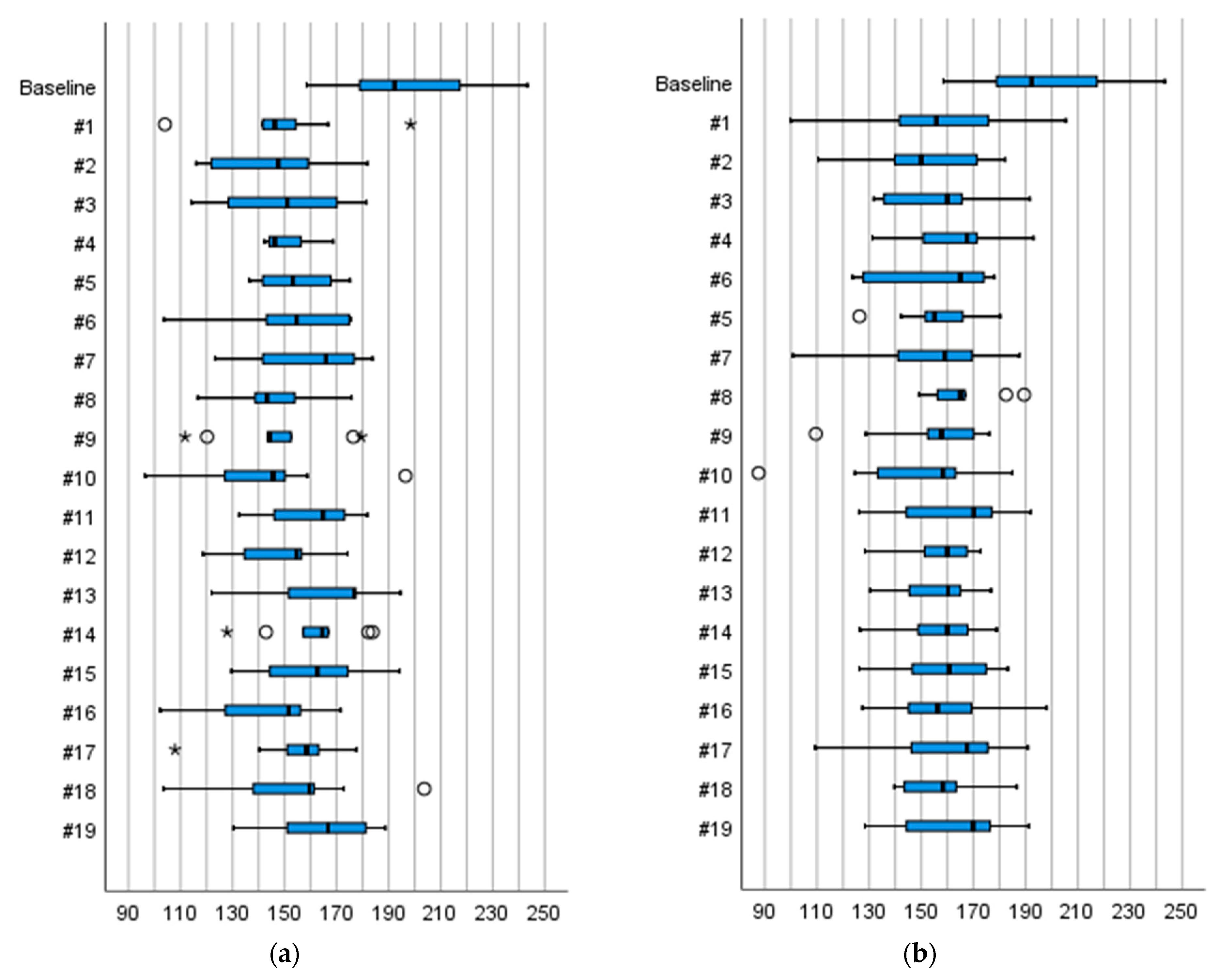
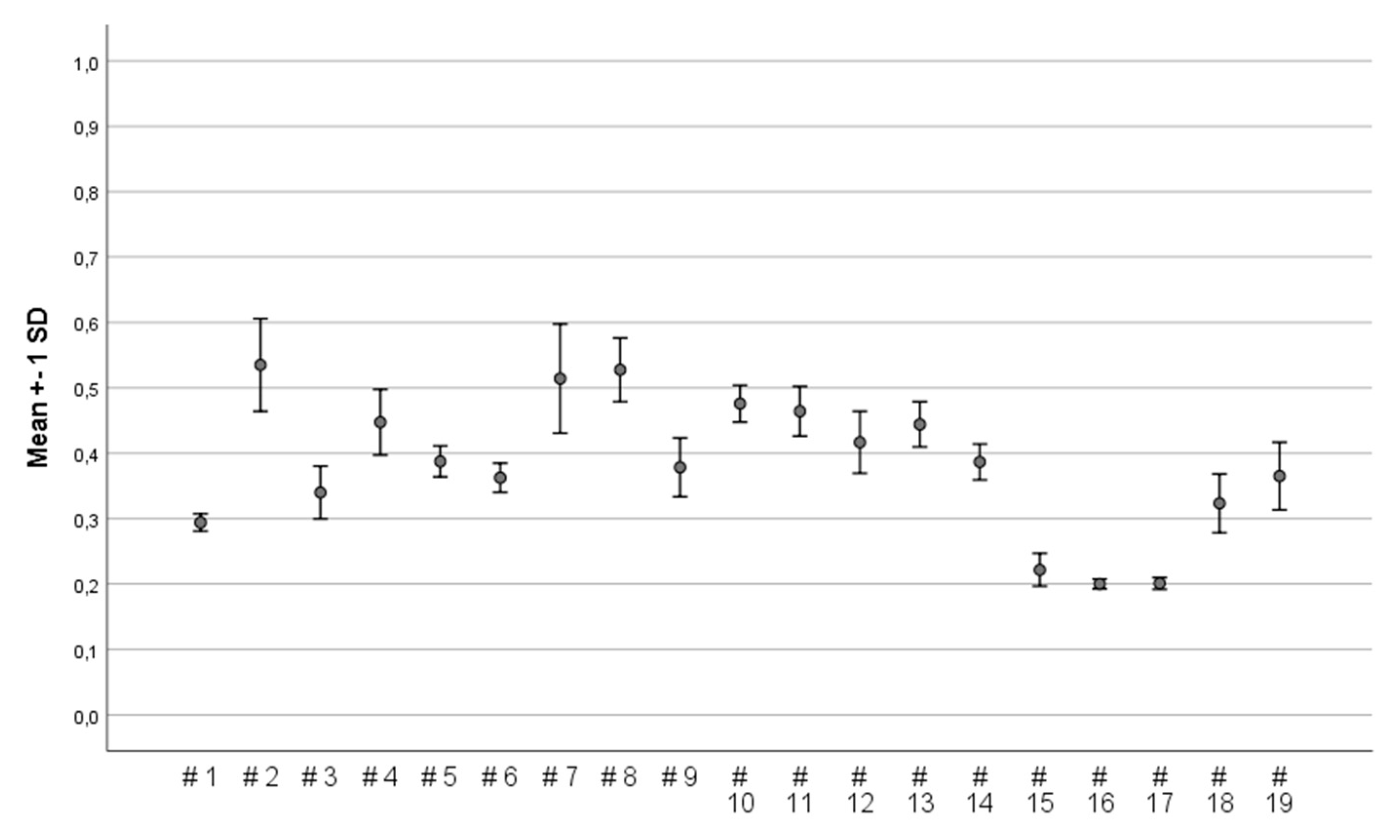
3.2. Gait Speed, DCOF, and the Relations of Pedestrian Ratings to these Measures
4. Discussion
4.1. Pedestrians Ratings of Fall Risk, Balance, and Footfall Transitions on Ice with Different Anti-Slip Devices
4.2. Gait Speed, DCOF, and the Relations of User Ratings to these Measures
4.3. Methodological Considerations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eriksson, J.; Sörensen, G. Winter Weathers’ Impact on Injuries in Single-Pedestrian Accidents; No: VTI Rapport 868; Swedish National Road and Transport Research Institute: Linköping, Sweden, 2015. [Google Scholar]
- Lépy, É.; Rantala, S.; Huusko, A.; Nieminen, P.; Hippi, M.; Rautio, A. Role of winter weather conditions and slipperiness on tourists’ accidents in finland. Int. J. Environ. Res. Public Health 2016, 13, 822. [Google Scholar] [CrossRef]
- Berggård, G. The Effect of Anti-Slip Devices on Pedestrian Safety. Ph.D. Thesis, Luleå University of Technology, Luleå, Sweden, 2010. [Google Scholar]
- MSB—Swedish Civil Contingencies Agency. Fall Accidents, Statistics and Analyses; MSB: Karlstad, Sweden, 2014; Volume 752.
- Gao, C.; Abeysekera, J. A systems perspective of slip and fall accidents on icy and snowy surfaces. Ergonomics 2004, 47, 573–598. [Google Scholar] [CrossRef]
- Chapman, D.; Nilsson, K.L.; Rizzo, A.; Larsson, A. Updating winter: The importance of climate-sensitive urban design for winter settlements. In Arctic Yearbook; Northern Research Forum: Akureyri, Iceland, 2018; pp. 86–105. [Google Scholar]
- Chen, D.; Chen, H.W. Using the Köppen classification to quantify climate variation and change: An example for 1901–2010. Environ. Dev. 2013, 6, 69–79. [Google Scholar] [CrossRef]
- Chapman, D.; Nilsson, K.; Larsson, A.; Rizzo, A. Climatic barriers to soft-mobility in winter: Luleå, Sweden as case study. Sustain. Cities Soc. 2017, 35, 574–580. [Google Scholar] [CrossRef]
- Grönqvist, R.; Abeysekera, J.; Gard, G.; Hsiang, S.; Leamon, T.; Newman, D.; Gielo-Perczak, K.; Lockhart, T.; Pai, C. Human-centered approaches in slipperiness measurement. Ergonomics 2001, 44, 1167–1199. [Google Scholar] [CrossRef]
- Redfern, M.S.; Cham, R.; Gielo-Perczak, K.; Grönqvist, R.; Hirvonen, M.; Lanshammar, H.; Marpet, M.; Pai C.Y.-C., IV; Powers, C. Biomechanics of slips. Ergonomics 2001, 44, 1138–1166. [Google Scholar] [CrossRef]
- Moyer, B.; Chambers, A.; Redfern, M.S.; Cham, R. Gait parameters as predictors of slip severity in younger and older adults. Ergonomics 2006, 49, 329–343. [Google Scholar] [CrossRef]
- Horak, F.B. Postural orientation and equilibrium: What do we need to know about neural control of balance to prevent falls? Age Ageing 2006, 35 (Suppl. 2), ii7–ii11. [Google Scholar] [CrossRef]
- Hu, X.; Qu, X. Differentiating slip-induced falls from normal walking and successful recovery after slips using kinematic measures. Ergonomics 2013, 56, 856–867. [Google Scholar] [CrossRef]
- Chambers, A.J.; Cham, R. Slip-related muscle activation patterns in the stance leg during walking. Gait Posture 2007, 25, 565–572. [Google Scholar] [CrossRef]
- Whitmore, M.W.; Hargrove, L.J.; Perreault, E.J. Gait characteristics when walking on different slippery walkways. IEEE Trans. Biomed. Eng. 2016, 63, 228–239. [Google Scholar] [CrossRef] [PubMed]
- Shumway-Cook, A.; Woollacott, M. Motor Control: Translating Research into Clinical Practice; Lippincott Williams & Wilkins: Baltimore, MD, USA; Philadelphia, PA, USA, 2011. [Google Scholar]
- Shumway-Cook, A.; Taylor, C.; Nooritake Matsuda, P.; Studer, M.; Whetten, B. Expanding the scoring system for the Dynamic Gait Index. Phys. Ther. 2013, 93, 1493–1506. [Google Scholar] [CrossRef] [PubMed]
- Gillespie, L.D.; Robertson, M.C.; Gillespie, W.J.; Sherrington, C.; Gates, S.; Clemson, L.M.; Lamb, S.E. Interventions for preventing falls in older people living in the community. Cochrane Database Syst. Rev. 2012, CD007146. [Google Scholar] [CrossRef] [PubMed]
- Eggenberger, P.; Tomovic, S.; Münzer, T.; de Bruin, E.D. Older adults must hurry at pedestrian lights! A cross-sectional analysis of preferred and fast walking speed under single-and dual-task conditions. PLoS ONE 2017, 12, e0182180. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Global Action Plan on Physical Activity 2018–2030: More Active People for a Healthier World; WHO: Geneva, Switzerland, 2018.
- Cepeda, M.; Koolhaas, C.M.; van Rooij, F.J.; Tiemeier, H.; Guxens, M.; Franco, O.H.; Schoufour, J.D. Seasonality of physical activity, sedentary behavior, and sleep in a middle-aged and elderly population: The Rotterdam study. Maturitas 2018, 110, 41–50. [Google Scholar] [CrossRef]
- Gard, G.; Berggård, G.; Rosander, P.; Larsson, A. Pedestrians perceptions of community walking with anti-slip devices: An explorative case study. J. Transp. Health 2018, 11, 202–208. [Google Scholar] [CrossRef]
- Rosendahl, S. Shape and Surface Characterization Using Diffused Light. Ph.D. Thesis, Luleå University of Technology, Luleå, Sweden, 2013. [Google Scholar]
- Bohannon, R.W. Comfortable and maximum walking speed of adults aged 20–79 years: Reference values and determinants. Age Ageing 1997, 26, 15–19. [Google Scholar] [CrossRef]
- Menz, H.B.; Latt, M.D.; Tiedemann, A.; San Kwan, M.M.; Lord, S.R. Reliability of the GAITRite® walkway system for the quantification of temporo-spatial parameters of gait in young and older people. Gait Posture 2004, 20, 20–25. [Google Scholar] [CrossRef]
- Verlinden, V.J.; van der Geest, J.N.; Hoogendam, Y.Y.; Hofman, A.; Breteler, M.M.; Ikram, M.A. Gait patterns in a community-dwelling population aged 50 years and older. Gait Posture 2013, 37, 500–505. [Google Scholar] [CrossRef] [Green Version]
- Huskisson, E. Measurement of pain. Lancet 1974, 9, 1127–1131. [Google Scholar] [CrossRef]
- Christophersen, J. Universal Design: 17 Ways of Thinking and Teaching; Husbanken: Oslo, Norway, 2002. [Google Scholar]
- Espy, D.D.; Yang, F.; Bhatt, T.; Pai, Y.-C. Independent influence of gait speed and step length on stability and fall risk. Gait Posture 2010, 32, 378–382. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brown, K.C.; Hanson, H.M.; Firmani, F.; Liu, D.; McAllister, M.M.; Merali, K.; Puyat, J.H.; Ashe, M.C. Gait speed and variability for usual pace and pedestrian crossing conditions in older adults using the GAITRite Walkway. Gerontol. Geriatr. Med. 2015, 1. [Google Scholar] [CrossRef] [PubMed]
- Verghese, J.; Holtzer, R.; Lipton, R.B.; Wang, C. Quantitative gait markers and incident fall risk in older adults. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 2009, 64, 896–901. [Google Scholar] [CrossRef] [PubMed]
- Gard, G.; Lundborg, G. Pedestrians on slippery surfaces during winter—Methods to describe the problems and practical tests of anti-skid devices. Accid. Anal. Prev. 2000, 32, 455–460. [Google Scholar] [CrossRef]
- Avineri, E.; Shinar, D.; Susilo, Y.O. Pedestrians’ behaviour in cross walks: The effects of fear of falling and age. Accid. Anal. Prev. 2012, 44, 30–34. [Google Scholar] [CrossRef] [PubMed]
- Tournier, I.; Dommes, A.; Cavallo, V. Review of safety and mobility issues among older pedestrians. Accid. Anal. Prev. 2016, 91, 24–35. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Type/Spikes | Description |
|---|---|---|
| #1 | F/5 | Designed with three and two metal studs, respectively, in two rows on a metal plate under the front part of the shoe. Attached by one elastic band around the forefoot and one around the heel. |
| #2 | F/2 | Designed with two studs under the front part of the shoe attached by an elastic band around the forefoot. |
| #3 | F/5 | Designed with five studs on a rubber plate under the forefoot attached by one elastic band around the forefoot and one around the heel. |
| #4 | H/4 | A heel device designed to cover only the rear and back of the sole, attached by a Velcro band. Four studs attached on a hard rubber plate under the heel. |
| #5 | H/4or5 | Similar to device #4, with 4 (medium size) or 5 (large size) studs, attached by a Velcro band. |
| #6 | H/5 | Similar to device #4, with five studs attached by a Velcro band. |
| #7 | W/8+4 | Designed as a hard rubber plate with eight studs under the forefoot and four under the heel, attached by one elastic band over toes and one behind the heel. |
| #8 | W6+4 | A whole foot device with six studs under the forefoot and four under the heel, attached with two elastic bands over toes and one behind the heel. |
| #9 | W/5+2 | Designed with five studs under the forefoot and two under the heel, attached by one elastic band over the toes and one behind the heel. |
| #10 | W/4+4 | Designed with four studs under the forefoot and four studs under the heel. |
| #11 | W/4+2 | Designed with four studs under the forefoot and two studs under the heel. |
| #12 | W/4+2 | Whole foot device with four studs under the forefoot and two studs under the heel. |
| #13 | W/4+2 | Designed with four studs under the forefoot and two under the heel. |
| #14 | W/4+2 | Whole foot device with four studs under forefoot and two under the heel. |
| #15 | W/sand | Whole foot device designed with one area a sand surface under forefoot and heel, respectively, framed by rubber. |
| #16 | W/rope | Designed with a net of synthetic ropes (and twelve small metal rings on the ropes) covering the whole underfoot surface, from toe to behind the heel. |
| #17 | W/spring | Designed with a net of synthetic ropes covered by springs under the whole underfoot. |
| #18 | Built-in | Fixed and foldable solution with 20 studs, attached to the shoe |
| #19 | Built-in | A solution with 16 retracting studs attached to the sole |
| Test | Median (Min–Max) |
|---|---|
| Comfortable walking speed (cm/sek) 1 | 139.3 (130.7–196.1) |
| Maximum walking speed (cm/sek) 1 | 192.3 (158.5–243.3) |
| Comfortable walking speed (cm/sec) 2 | 128.8 (112.4−156.4) |
| Maximum walking speed (cm/sec) 2 | 183.7 (149.8−239.7) |
| Stride length at comfortable walking speed (cm) 2 | 78.1 (69.5−86.4) |
| Stride length at maximum walking speed (cm) 2 | 88.6 (79.4−104.1) |
| Double-support phase at comfortable walking speed (% of cycle) 2 | 23.3 (19.4−30.56) |
| Double-support phase at maximum walking speed (% of cycle) 2 | 19.6 (13.7−22.5) |
| Ice Uncovered | ||||||||
|---|---|---|---|---|---|---|---|---|
| # | Comfortable Gait Speed 1 | Maximum Gait Speed 1 | Balance 2 | Fall Risk 2 | Heel Strike 2 | Toe Off 2 | p 3 | p 4 |
| 1 | 140.2 (112.1−172.1) | 146.2 (104.0−198.4) | 71 (20−99) | 36 (1−97) | 35 (5−99) | 78 (49−99) | 0.374 | 0.011 |
| 2 | 132.1 (101.2−142.9) | 147.5 (116.9−181.8) | 66 (30−100) | 43 (7−59) | 21 (3−68) | 57 (13−100) | 0.036 | 0.011 |
| 3 | 136.2 (122.0−150.2) | 151.1 (114.2−181.5) | 78 (25−100) | 27 (1−95) | 31 (1−99) | 71 (35−99) | 0.173 | 0.011 |
| 4 | 138.7 (119.9−142.9) | 146.2 (142.2−168.6) | 88 (58−98) | 20 (0−91) | 91 (15−99) | 51 (5−98) | 0.441 | 0.008 |
| 5 | 129.2 (124.7−151.5) | 153.1 (136.4−175.1) | 70 (50−98) | 23 (3−82) | 80 (73−99) | 23 (8−99) | 0.066 | 0.008 |
| 6 | 133.3 (113.9−153.1) | 154.6 (103.6−175.4) | 74 (41−96) | 19 (0−62) | 71 (54−95) | 25 (6−85) | 0.110 | 0.008 |
| 7 | 136.4 (117.6−163.4) | 165.8 (123.3−183.8) | 83 (52−98) | 3 (2−53) | 75 (45−98) | 80 (48−99) | 0.173 | 0.008 |
| 8 | 129.9 (110.7−144.9) | 143.3 (116.7−175.8) | 81 (22−92) | 31 (0−70) | 62 (39−94) | 65 (38−91) | 0.028 | 0.008 |
| 9 | 129.2 (111.5−143.5) | 144.3 (111.7−179.5) | 71 (24−98) | 16 (2−65) | 55 (33−95) | 58 (31−95) | 0.021 | 0.011 |
| 10 | 121.6 (110.4−173.0) | 145.6 (96.3−196.5) | 67 (45−99) | 38 (4−71) | 58 (28−94) | 62 (28−90) | 0.260 | 0.011 |
| 11 | 140.4 (114.2−157.2) | 164.7 (132.4−181.8) | 93 (64−99) | 10 (1−65) | 76 (1−99) | 89 (6−98) | 0.678 | 0.008 |
| 12 | 127.7 (119.8−144.7) | 154.6 (118.6−174.2) | 81 (65−100) | 19 (0−54) | 70 (55−100) | 71 (50−100) | 0.028 | 0.008 |
| 13 | 129.9 (122.6−154.6) | 176.7 (122.0−194.6) | 88 (80−100) | 11 (0−23) | 80 (63−100) | 79 (68−100) | 0.051 | 0.028 |
| 14 | 138.0 (125.9−155.3) | 164.5 (127.9−183.8) | 93 (76−100) | 6 (1−29) | 86 (71−99) | 90 (63−99) | 0.314 | 0.011 |
| 15 | 139.7 (125.3−153.8) | 162.5 (129.5−194.2) | 90 (78−100) | 5 (0−23) | 77 (68−100) | 78 (49−97) | 0.069 | 0.025 |
| 16 | 123.2 (105.8−145.6) | 151.5 102.2−171.5) | 42 (17−98) | 73 (1−99) | 55 (1−95) | 56 (2−95) | 0.015 | 0.008 |
| 17 | 134.4 (99.4−157.5) | 158.5 (107.9−177.6) | 72 (24−100) | 26 (7−85) | 65 (28−100) | 61 (22−95) | 0.021 | 0.008 |
| 18 | 131.6 (107.8−197.6) | 159.5 (103.5−203.7) | 82 (29−96) | 12 (2−80) | 56 (6−95) | 56 (12−96) | 0.139 | 0.008 |
| 19 | 138.5 (118.9−158.2) | 166.7 (130.4−188.7) | 96 (82−100) | 3 (0−11) | 95 (73−100) | 96 (72−100) | 0.214 | 0.011 |
| Snow-Covered Ice | ||||||||
|---|---|---|---|---|---|---|---|---|
| # | Comfortable Gait Speed 1 | Maximum Gait Speed 1 | Balance 2 | Fall Risk 2 | Heel Strike2 | Toe Off 2 | p 3 | p 4 |
| 1 | 148.1 (101.7−176.7) | 155.8 (99.8−205.3) | 68 (27−92) | 32 (3−59) | 40 (4−78) | 60 (30−95) | 0.314 | 0.011 |
| 2 | 132.3 (117.5−151.8) | 149.9 (110.5−182.2) | 62 (32–94) | 44 (0−76) | 20 (3−65) | 52 (4−74) | 0.038 | 0.008 |
| 3 | 135.7 (121.1−157.7) | 160.0 (131.8−191.6) | 68 (5−98) | 22 (3−100) | 35 (2−99) | 67 (40−98) | 0.139 | 0.008 |
| 4 | 142.8 (129.0−177.9) | 167.5 (131.2−193.05) | 92 (64−98) | 14 (2−66) | 79 (11−99) | 31 (16−98) | 0.953 | 0.011 |
| 5 | 135.1 (128.7−153.8) | 155.0 (126.3−180.2) | 78 (47−98) | 23 (2−80) | 80 (56−97) | 54 (14−96) | 0.214 | 0.011 |
| 6 | 143.7 (117.2−170.4) | 165.0 (123.6−177.9) | 74 (60−95) | 21 (0−76) | 62 (42−91) | 55 (13−89) | 0.314 | 0.008 |
| 7 | 139.1 (113.5−173.9) | 159.0 (100.8−187.6) | 82 (21−96) | 6 (1−97) | 80 (18−95) | 76 (17−98) | 0.594 | 0.008 |
| 8 | 142.8 (111.9−159.2) | 165.0 (149.0−189.4) | 92 (22−98) | 19 (2−48) | 84 (27−97) | 82 (27−95) | 0.767 | 0.015 |
| 9 | 138.5 (117.4−154.1) | 157.7 (109.5−176.1) | 74 (21−99) | 15 (3−50) | 71 (38−99) | 71 (39−97) | 0.260 | 0.008 |
| 10 | 133.0 (90.8−170.1) | 158.2 (87.6−184.8) | 61 (28−97) | 25 (2−67) | 60 (26−94) | 63 (26−94) | 0.161 | 0.008 |
| 11 | 141.4 (120.3−161.3) | 170.1 (126.1−191.9) | 90 (63−99) | 12 (1−29) | 78 (56−98) | 79 (34−98) | 0.953 | 0.008 |
| 12 | 133.3 (119.1−157.5) | 160.0 (128.4−172.7) | 91 (64−99) | 11 (0−41) | 66 (41−99) | 62 (15−88) | 0.051 | 0.008 |
| 13 | 136.4 (121.1−156.5) | 160.2 (130.4−176.7) | 90 (66−100) | 11 (0−34) | 93 (64−99) | 92 (8−99) | 0.214 | 0.008 |
| 14 | 139.3 (127.6−164.2) | 160.0 (126.4−178.9) | 87 (70−98) | 10 (2−59) | 91 (59−98) | 83 (35−97) | 0.441 | 0.012 |
| 15 | 140.8 (130.0−154.6) | 160.6 (126.3−183.2) | 88 (81−99) | 8 (1−60) | 76 (50−100) | 76 (44−91) | 0.263 | 0.012 |
| 16 | 142.8 (130.6−159.0) | 156.2 (127.4−198.0) | 87 (37−98) | 9 (2−80) | 86 (7−100) | 88 (11−100) | 0.484 | 0.008 |
| 17 | 141.0 (116.0−159.0) | 167.5 (109.3−190.8) | 83 (55−100) | 18 (0−52) | 69 (41−96) | 63 (40−100) | 0.441 | 0.008 |
| 18 | 137.4 (120.3−158.2) | 158.2 (139.7−186.6) | 92 (48−96) | 8 (0−75) | 84 (12−95) | 82 (14−95) | 0.139 | 0.008 |
| 19 | 147.1 (121.2−171.2) | 169.8 (128.4−191.2) | 96 (77−100) | 4 (0−36) | 95 (5−100) | 94 (34−100) | 0.515 | 0.008 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Larsson, A.; Berggård, G.; Rosander, P.; Gard, G. Gait Speed with Anti-Slip Devices on Icy Pedestrian Crossings Relate to Perceived Fall-Risk and Balance. Int. J. Environ. Res. Public Health 2019, 16, 2451. https://doi.org/10.3390/ijerph16142451
Larsson A, Berggård G, Rosander P, Gard G. Gait Speed with Anti-Slip Devices on Icy Pedestrian Crossings Relate to Perceived Fall-Risk and Balance. International Journal of Environmental Research and Public Health. 2019; 16(14):2451. https://doi.org/10.3390/ijerph16142451
Chicago/Turabian StyleLarsson, Agneta, Glenn Berggård, Peter Rosander, and Gunvor Gard. 2019. "Gait Speed with Anti-Slip Devices on Icy Pedestrian Crossings Relate to Perceived Fall-Risk and Balance" International Journal of Environmental Research and Public Health 16, no. 14: 2451. https://doi.org/10.3390/ijerph16142451
APA StyleLarsson, A., Berggård, G., Rosander, P., & Gard, G. (2019). Gait Speed with Anti-Slip Devices on Icy Pedestrian Crossings Relate to Perceived Fall-Risk and Balance. International Journal of Environmental Research and Public Health, 16(14), 2451. https://doi.org/10.3390/ijerph16142451