4.5. Model Analysis
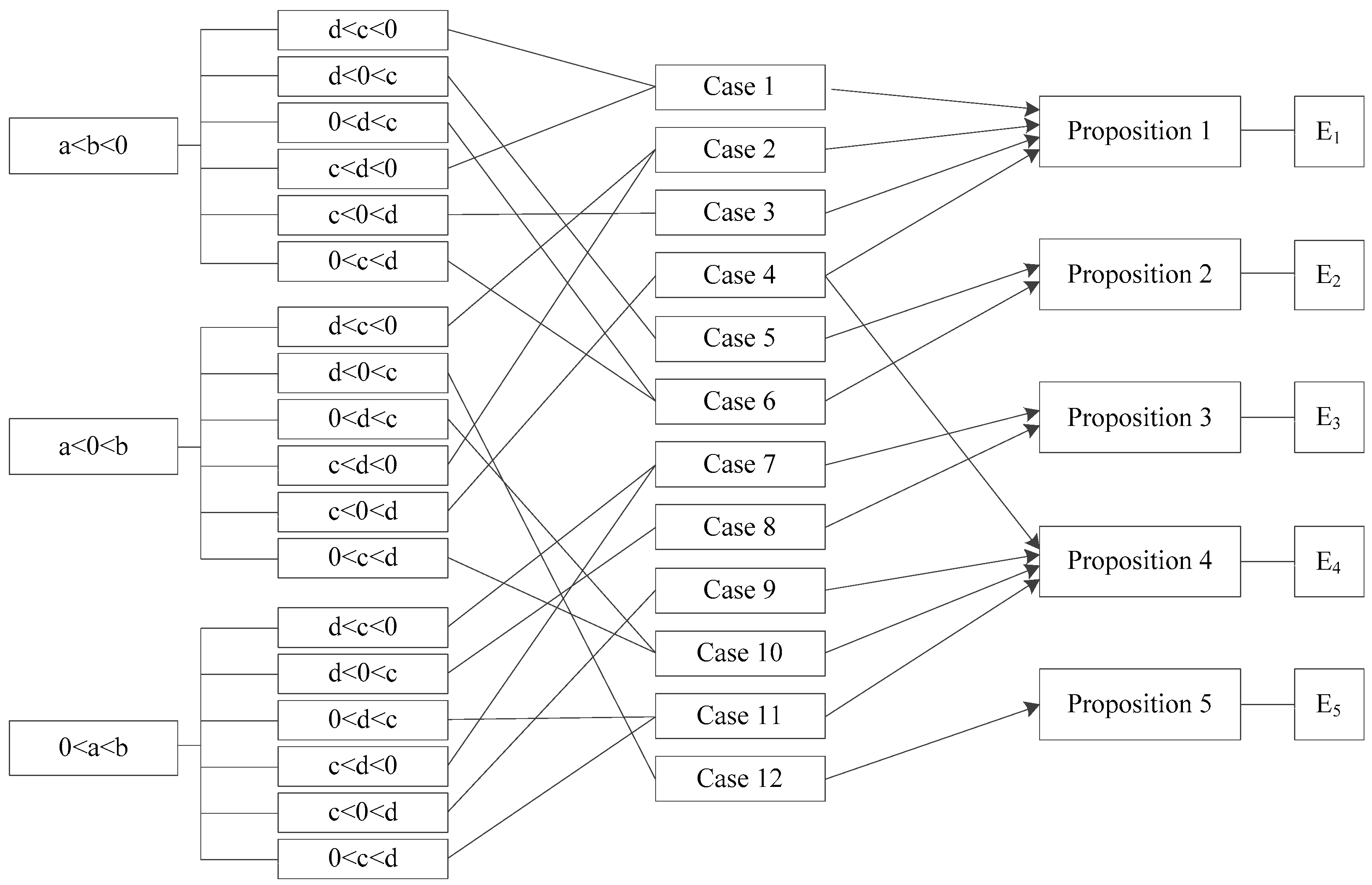
As it is mentioned, whether the possible equilibrium point is stable depends on the signs of detJ and trJ. We conduct an analysis of the local stability of equilibrium in twelve cases and try to find out the stable point of the system based on the judging standard. The diagrams on the dynamic evolution of the equilibrium points are given for further study.
Proposition 1. When and , is an ESS, which means the government and contractors will choose to {not supervise, not obey}.
Proof. This ESS can be subdivided into the following four cases (cases 1–4). □
Case 1: When , and .
On the one hand, when , we could derive that the sign of () is positive and , which is in contradiction with the probability meaning of . On the other hand, when , we could derive that the sign of () is positive and . While , the value of is greater than 1 which is in contradiction with the probability meaning of .
In a word, point
does not exist, and there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
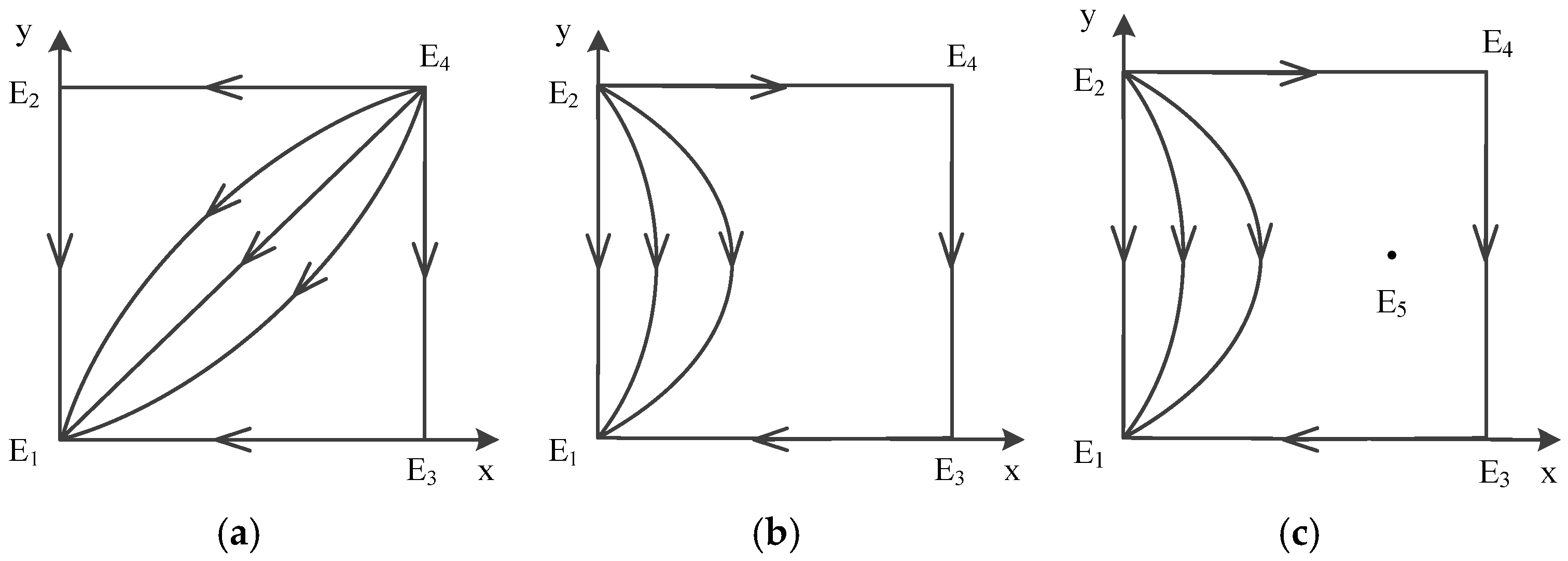
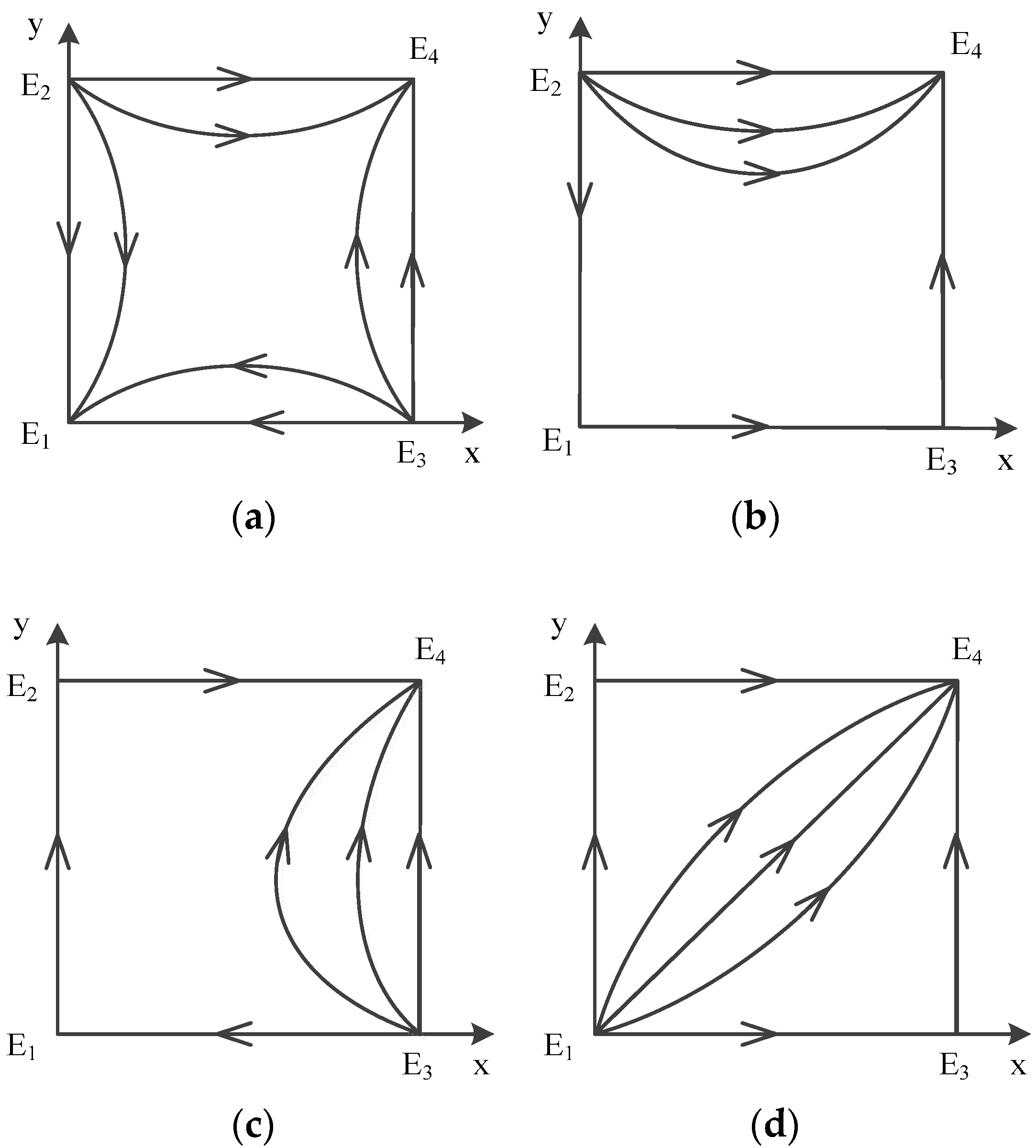
Table 6 (Case 1). According to the conclusion, the trace of dynamic evolution is depicted in
Figure 4a, which shows dynamic evolution diagram of strategies between government and contractors.
We can see that the evolutionary model will eventually converge at no matter which strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {not supervise, not obey}.
Case 2: When , and .
Same as the discussion above, when , the sign of is positive and the sign of, we could derive . Point does not exist, there are only four possible equilibrium points left: , , , .
However, when , the sign of and is negative, we could derive , otherwise , thus . The value of belongs to [0, 1]. In addition, and , we could derive . , we could derive . The value of belongs to [0, 1].
Afterwards, point
exists, and there are five possible equilibrium points left:
,
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
Table 6 (Case 2-1), and about another five points are shown in
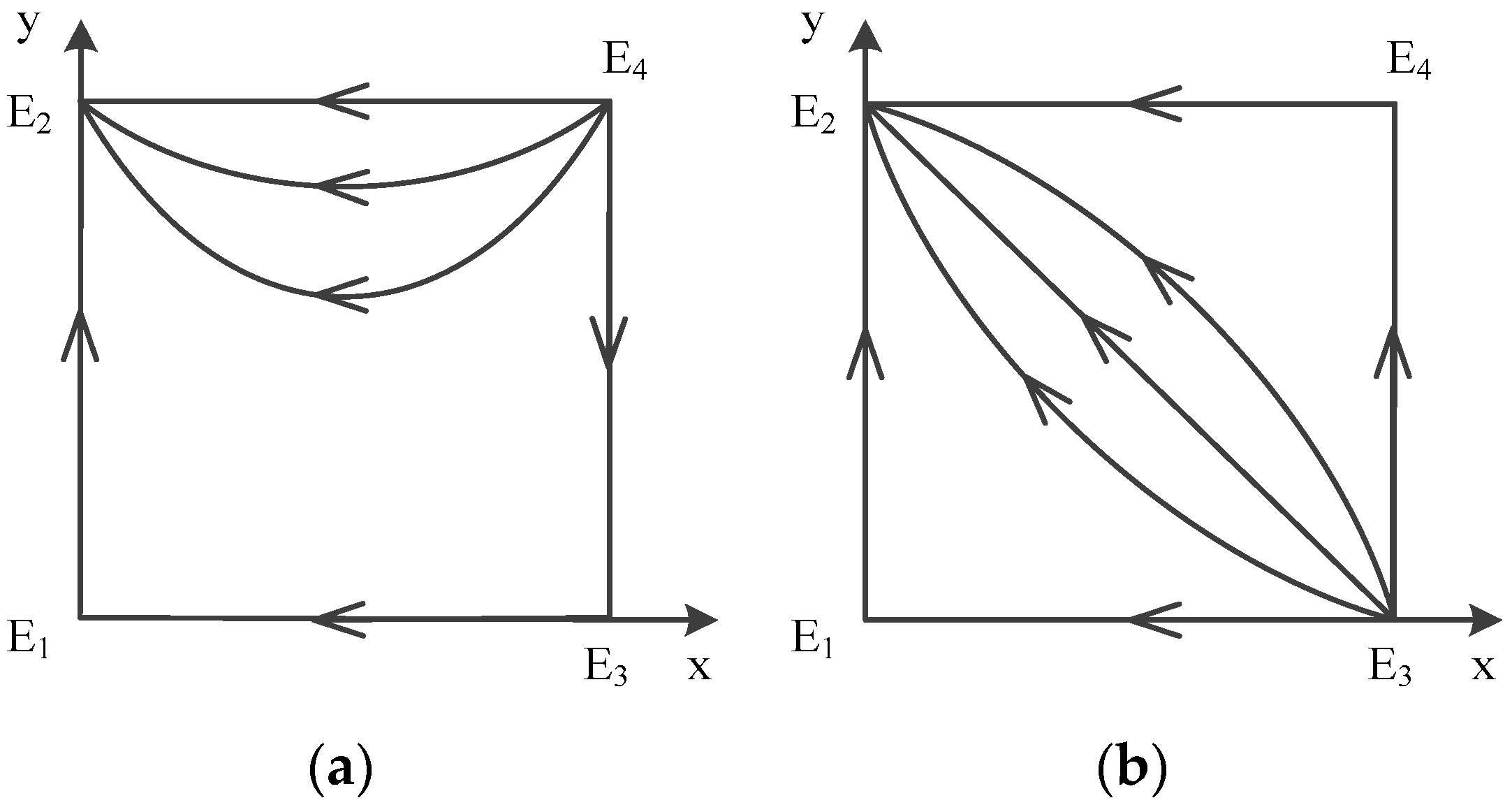
Table 6 (Case 2-2). According to the conclusion, the evolution of mixed strategy is shown in
Figure 4b,c, which depicts dynamic evolution diagram of strategies between government and contractors. The difference between case 1 and case 2 is the unstable point. The difference between the two circumstances in case 2 is the
point.
We can see that the evolutionary model will eventually converge at no matter which strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point; in case 2-2 is the center point. The ESS is {not supervise, not obey}.
Case 3: When and .
In this case, we could derive that the sign of is positive and . While , the value of is greater than 1 which is in contradiction with the probability meaning of .
In a word, point
does not exist. There are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
Table 6 (Case 3). According to the conclusion, the evolution of mixed strategy is shown in
Figure 4d, which depicts dynamic evolution diagram of strategies between government and contractors.
We can see that the evolutionary model will eventually converge at no matter which strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {not supervise, not obey}.
Case 4: When and .
In this case, and , we could derive . Otherwise , the value of is greater than 1 which is in contradiction with the probability meaning of .
In a word, point
does not exist, and there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
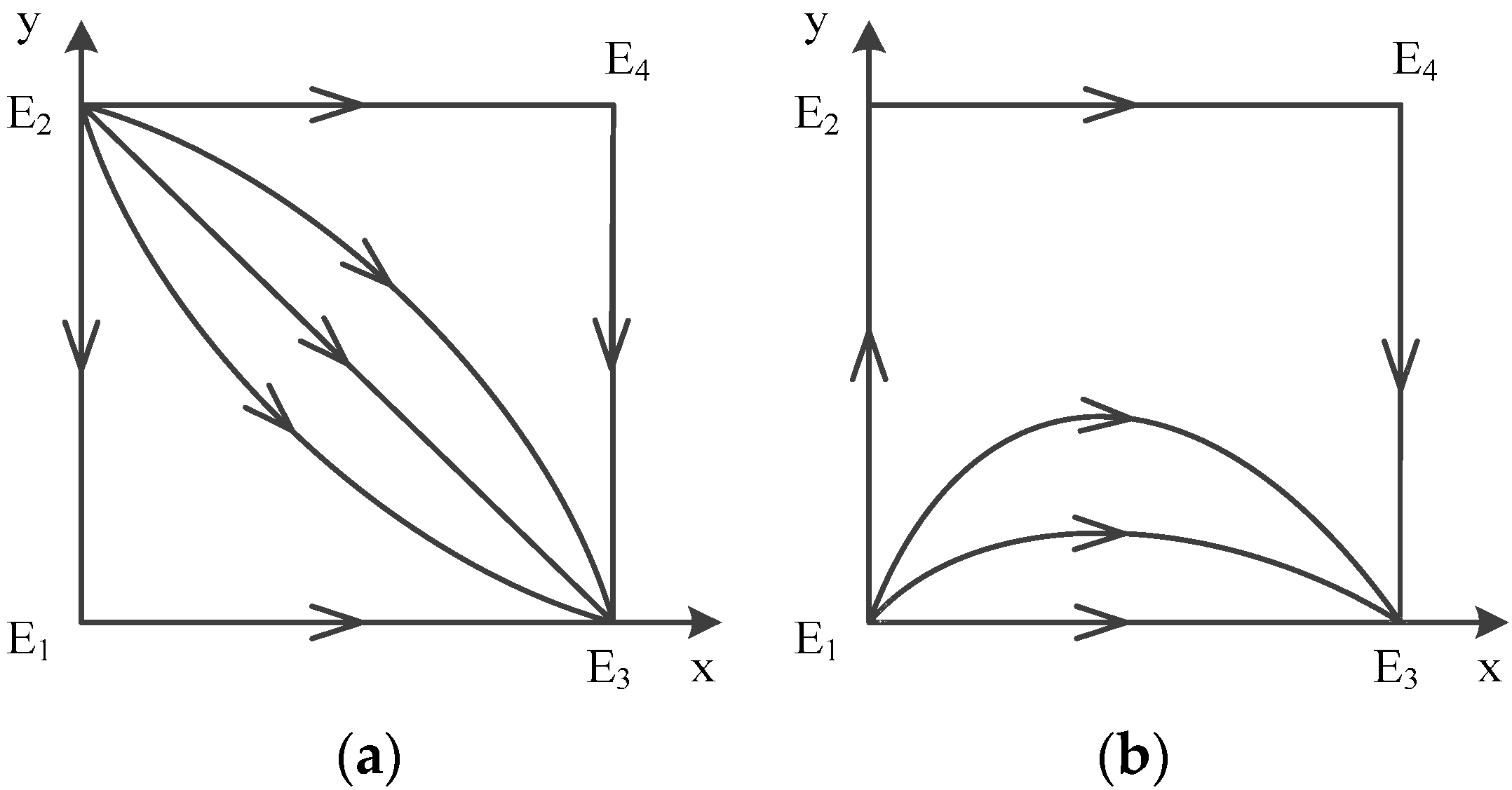
Table 6 (Case 4). According to the conclusion, the evolution of mixed strategy is shown in
Figure 4e, which depicts dynamic evolution diagram of strategies between government and contractors.
We can see that the evolutionary model will eventually converge at and no matter which strategies are initially used by game players. Therefore, and are the evolutionarily stable points; and are the unstable points. The ESSs are {not supervise, not obey} and {supervise, obey}.
According to the conclusion, the evolution of mixed strategy is shown in
Figure 3, which depicts a dynamic evolution diagram of strategies between the government and contractors. It is worth mentioning the situation that both
and
are ESS points in case 4.
Proposition 2. When and , is an ESS, which means the government and contractors will choose to {not supervise, obey}.
Proof. This ESS can be subdivided into the following two cases (case 5, case 6). □
Case 5: When and .
In this case, we could derive . While , the value of is greater than 1 which is in contradiction with the probability meaning of .
In a word, point
does not exist, and there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
Table 7 (Case 5). According to the conclusion, the evolution of mixed strategy is shown in
Figure 5a, which depicts dynamic evolution diagram of strategies between government and contractors.
We can see that the evolutionary model will eventually converge at no matter which strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {not supervise, obey}.
Case 6: When , and .
On the one hand, when , we could derive and , thus . Otherwise , the value of is greater than 1 which is in contradiction with the probability meaning of . On the other hand, when . We could derive and , thus , which is in contradiction with the probability meaning of .
In a word, point
does not exist, and there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
Table 7 (Case 6). According to the conclusion, the evolution of mixed strategy is shown in
Figure 5b, which depicts a dynamic evolution diagram of strategies between government and contractors.
We can see that the evolutionary model will eventually converge at no matter which strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {not supervise, obey}.
According to the conclusion, the evolution of mixed strategy is shown in
Figure 4, which depicts dynamic evolution diagram of strategies between government and contractors.
Proposition 3. When and , is an ESS, which means the government and contractors will choose to {supervise, not obey}.
Proof. This ESS can be subdivided into the following two cases (case 7, case 8). □
Case 7: When , and .
On the one hand, when . The sign of is positive and the sign of is negative, we could derive . On the other hand, when . We could derive that the sign of is positive and .
In a word, point
does not exist, and there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these points is shown in
Table 8 (Case 7). According to the conclusion, the evolution of mixed strategy is shown in
Figure 6a, which depicts a dynamic evolution diagram of strategies between government and contractors.
We can see that the evolutionary model will eventually converge at no matter whichever strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {supervise, not obey}.
Case 8: When and .
In this case, we could derive that the sign of is positive and , which is in contradiction with the probability meaning of .
In a word, point
does not exist, and there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
Table 8 (Case 8). According to the conclusion, the evolution of mixed strategy is shown in
Figure 6b, which depicts a dynamic evolution diagram of strategies between government and contractors.
We can see that the evolutionary model will eventually converge at no matter what strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {supervise, not obey}.
According to the conclusion, the evolution of mixed strategy is shown in
Figure 5, which depicts dynamic evolution diagram of strategies between government and contractors.
Proposition 4. When and , is an ESS, which means the government and contractors will choose to {supervise, obey}.
Proof. This ESS can be subdivided into the following four cases (case 4, case 9-case 11). □
Case 4: According to previous calculations, is an ESS in case 4.
Case 9: When and .
In this case, and , we could derive . Because , the value of is greater than 1 which is in contradiction with the probability meaning of .
In a word, point
does not exist, and there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
Table 9 (Case 9). According to the conclusion, the evolution of mixed strategy is shown in
Figure 7b, which depicts a dynamic evolution diagram of strategies between the government and contractors.
We can see that the evolutionary model will eventually converge at no matter whichever strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {supervise, obey}.
Case 10: When , and .
On the one hand, when , and . We could derive . Otherwise , the value of is greater than 1 which is in contradiction with the probability meaning of . On the other hand, when . Thus and , we could derive .
In a word, point
does not exist, there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
Table 9 (Case 10). According to the conclusion, the evolution of mixed strategy is shown in
Figure 7c, which depicts a dynamic evolution diagram of strategies between the government and contractors.
We can see that the evolutionary model will eventually converge at no matter whichever strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {supervise, obey}.
Case 11: When , and .
On the one hand, when . Thus and , we could derive . Otherwise , the value of is greater than 1 which is in contradiction with the probability meaning of . On the other hand, when , and , we could derive .
In a word, point
does not exist, and there are only four possible equilibrium points left:
,
,
,
. The analysis of local stability of equilibrium about these four points is shown in
Table 9 (Case 11). According to the conclusion, the evolution of mixed strategy is shown in
Figure 7d, which depicts a dynamic evolution diagram of strategies between the government and contractors.
We can see that the evolutionary model will eventually converge at no matter what strategies are initially used by game players. Therefore, is the evolutionarily stable point; and are saddle points; and is the unstable point. The ESS is {supervise, obey}.
According to the conclusion, the evolution of mixed strategy is shown in
Figure 6, which depicts a dynamic evolution diagram of strategies between the government and contractors.
Proposition 5. When and , is an ESS which means the government and contractors will reach a mixed equilibrium point.
Proof. There is only one case for this ESS (case 12). □
Case 12: In this case, and . Thus . Otherwise , we could derive . The value of belongs to [0, 1]. and , we could derive ., we could derive . The value of belongs to [0, 1].
So there are five possible equilibrium points in this case which is special comparing other cases:
,
,
,
,
. The analysis of local stability of equilibrium about these five points is shown in
Table 10.
In
Table 10, we find that
,
,
,
are all unstable points, while
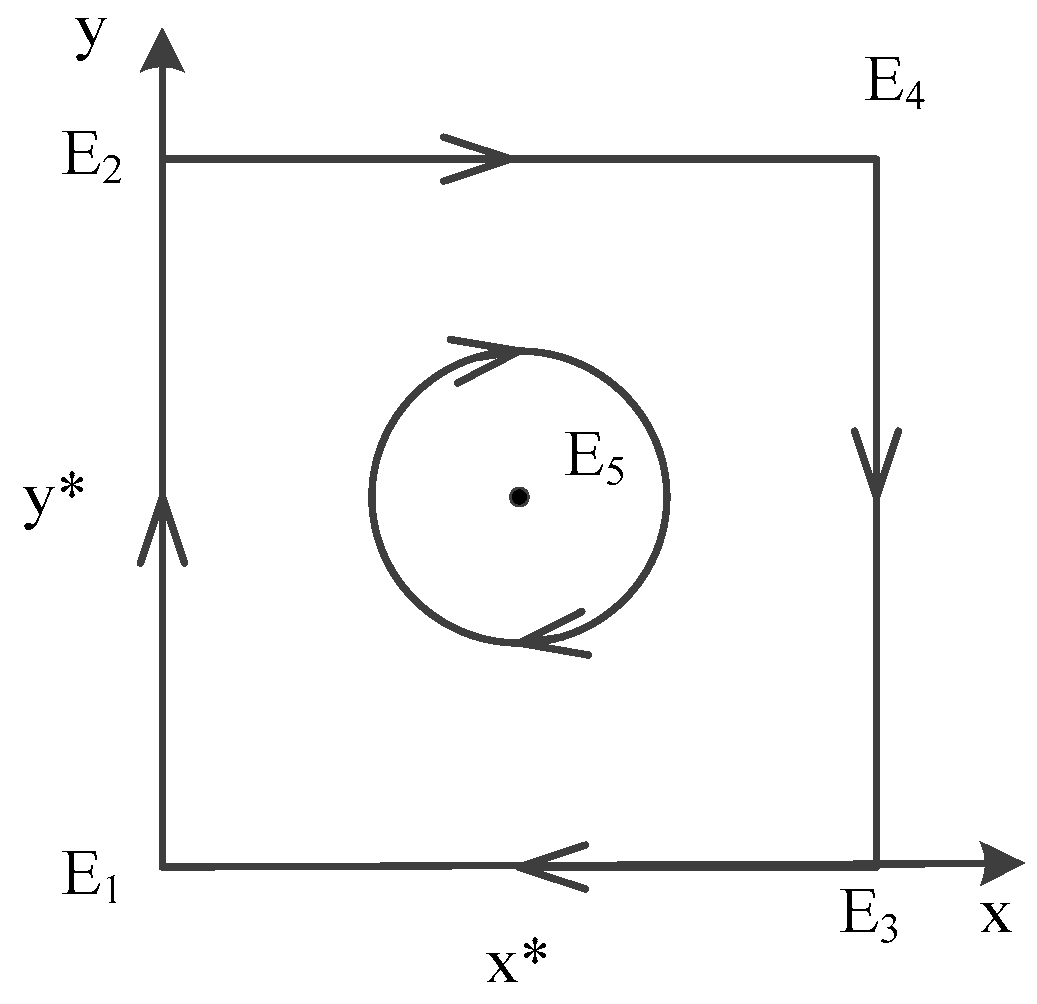
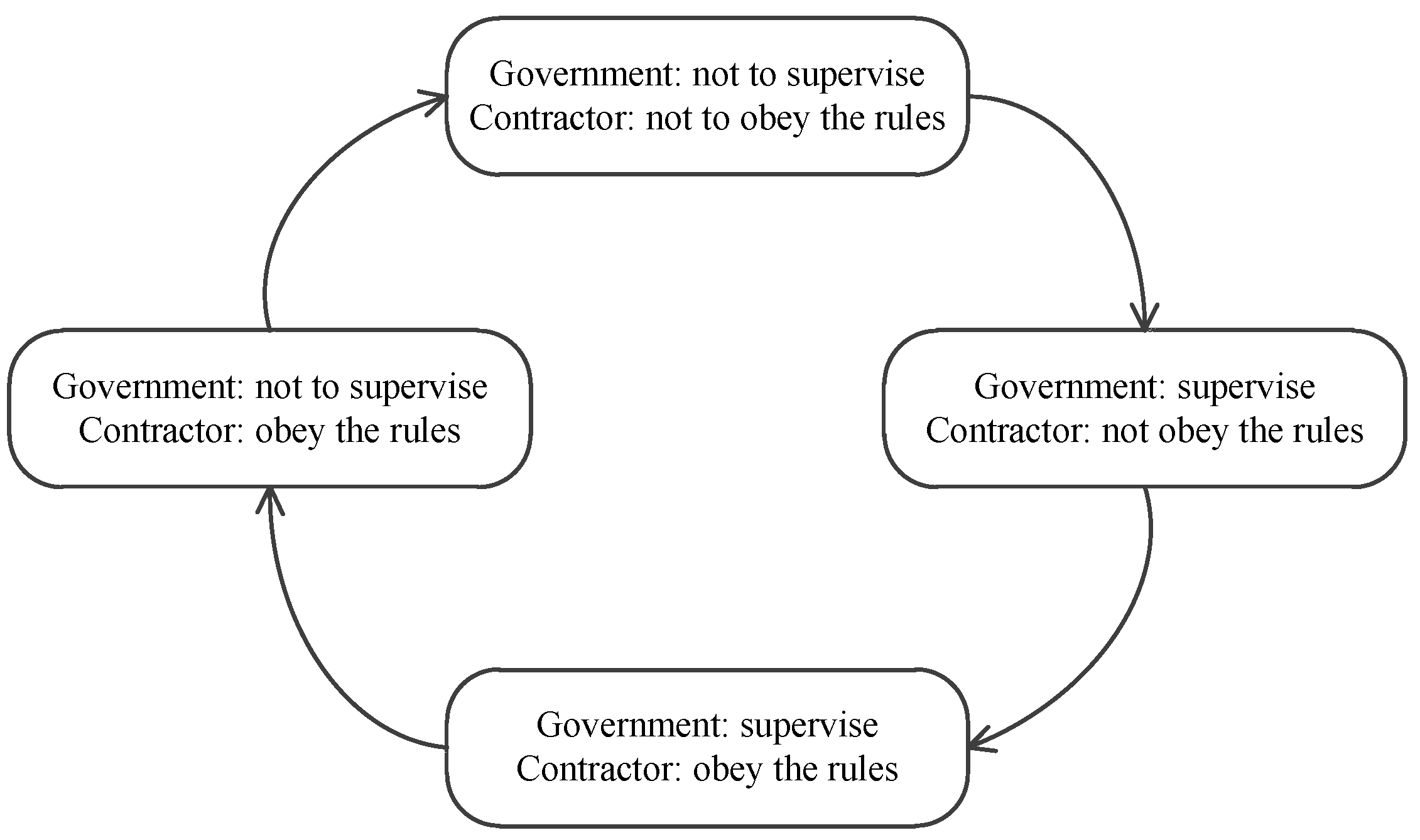
is a center point. The diagram on the dynamic evolution of equilibrium points (
Figure 8) is shown that there is no ESS in this case. The ultimate choice changes dynamically and is affected by the initial strategy made by government and contractors. If the initial strategy between government and contractors is
, the strategy will be changed to
, then come to
, and arrive at
with time going by. It is a circular process, and an ESS does not exist in this case. The circular process is depicted in
Figure 9.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}