1. Introduction
A variety of studies are under way today in developing driver assistance systems. A driver assistance system aims to help drivers to drive more safely under various traffic environments. Modern technologies, such as video detection, Light Detection and Ranging (LiDAR), and V2X communication, have been tested and used in some cases [
1]. However, a new question arises with such rapid development of information-based systems: how do intelligent driving systems (including assistance driving systems) deal with these forms of information? Will they respond like a machine or a human being? Responding like a machine means using a pre-set unchangeable process mode as the core of the system without consideration of drivers’ personal needs. A humanized system learns to respond in human recognition mode that takes both a driver’s perspective and real-time mechanical data into consideration, which would thereby provide suitable assistance according to different driving conditions.
In this research study, an intelligent driving system is regarded as the interaction between a driver and a vehicle. The advanced driver assistance system (ADAS) has been improved a lot in recent years, with many features such as obstacle warning, collision warning, lane control and traffic light assistance strategy, to keep drivers informed of the latest information or warnings during the driving process [
2,
3,
4,
5]. In such systems, the so-called “Perception-response time” (PR time) or “Perception-response distance” is usually defined as an empirical value (e.g., 3 s) according to the Chinese Highway Standard [
6] or a fixed range (e.g., 1.5 to 3.5 km) [
7]. However, perception-response (PR) time as defined by Olson and Sivak is “the time from the first sighting of an obstacle until the driver applies the brakes” [
8]. It was tested that the PR time of over 95% of tested drivers, including young and old, was 1.6 s. This indicates that the value suggested by the current national standard is improper, due to the loss of real individual data. However, timely, relevant, and comprehensive information is quite vital when providing drivers with more choices and perception-response time to an emergency situation [
9].
As PR time varies among individuals, personal driving behavior should to be included in order to meet drivers’ humanized demands. Past studies mainly treat this factor as driving experience, which appeared to be a safe-relevant element in comparative study. It showed a positive impact in drivers’ response time to static roadway hazards [
10]. By estimating the performance of novice, experienced, highly-experienced, and taxi drivers through video and eye movement data, Borowsky and Oron-Gilad revealed that drivers who had more driving experience were more skilled in the awareness of materialized hidden hazards [
11]. Moreover, skilled drivers alter their driving behavior more frequently than the unexperienced ones to adapt accordingly to changing driving situations [
12]. Although more driving experience would help drivers to respond more properly than new drivers [
13], its impact differs among drivers. It is not always important in all situations. According to Sagberg and Bjørnskau [
14], driving experience did not show a strong relationship with hazard perception time. It also did not show a significant influence on obvious risk perception. Some detailed methods have been introduced to describe the effects of different driving behaviors, such as driving habit graph (DHG) which can be utilized to explain different driving performances [
15]. Naturalistic driving factors are also considered in individual-targeted driving response time studies, including safety margin adjusting [
16], braking control [
17], and eye-off-road ratio [
18]. Drivers’ gaze data were also used in ADAS to identify simulation information for drivers and to make predictions of behaviors [
19,
20].
The factors above reflect drivers’ performance and differentiation, but ultimately the performance of drivers is still largely based upon the perception and decisions of drivers. A driving assistance system based on these elements loses the “Perception-Response” process. It cannot really “think” as a real driver from the first identification of a changing driving circumstance. Human-simulated ADAS needs to respond like a human in advance, such as the graphical model proposed by Oliver and Pentland who established the relationship between driver and vehicle with vehicle data, road geometric elements, and drivers’ vision data [
21].
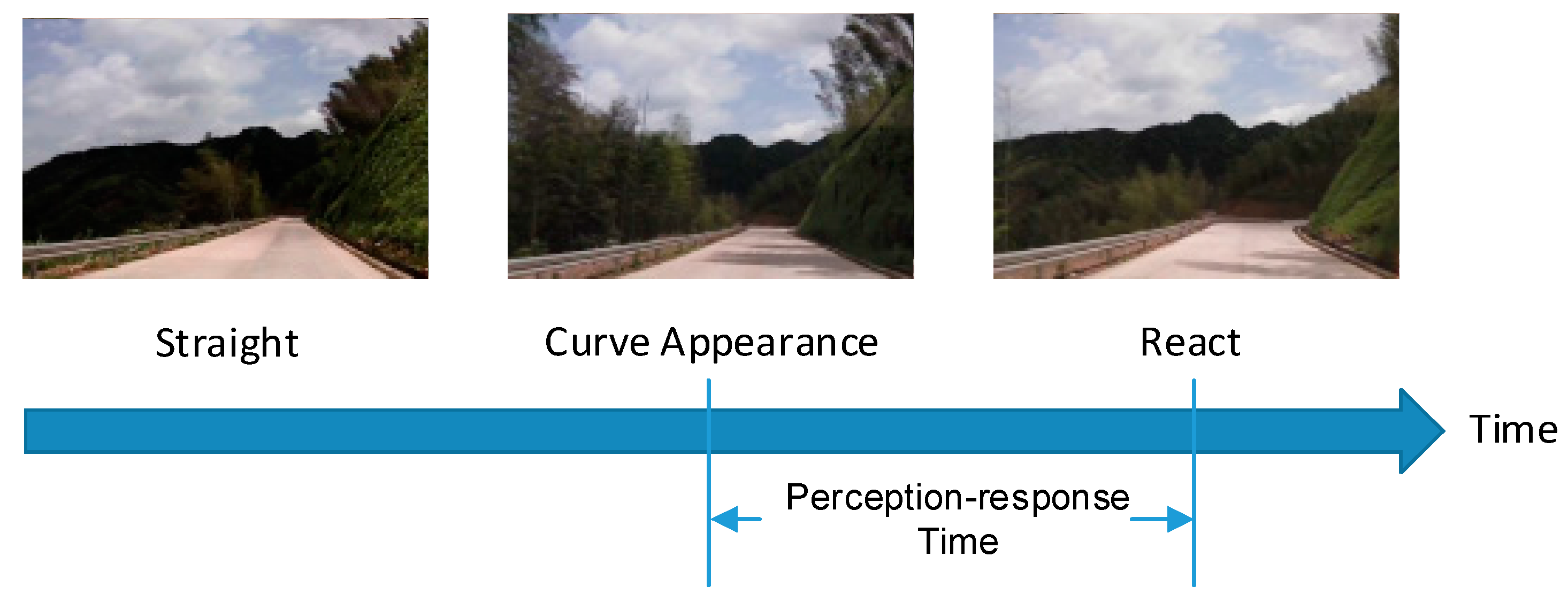
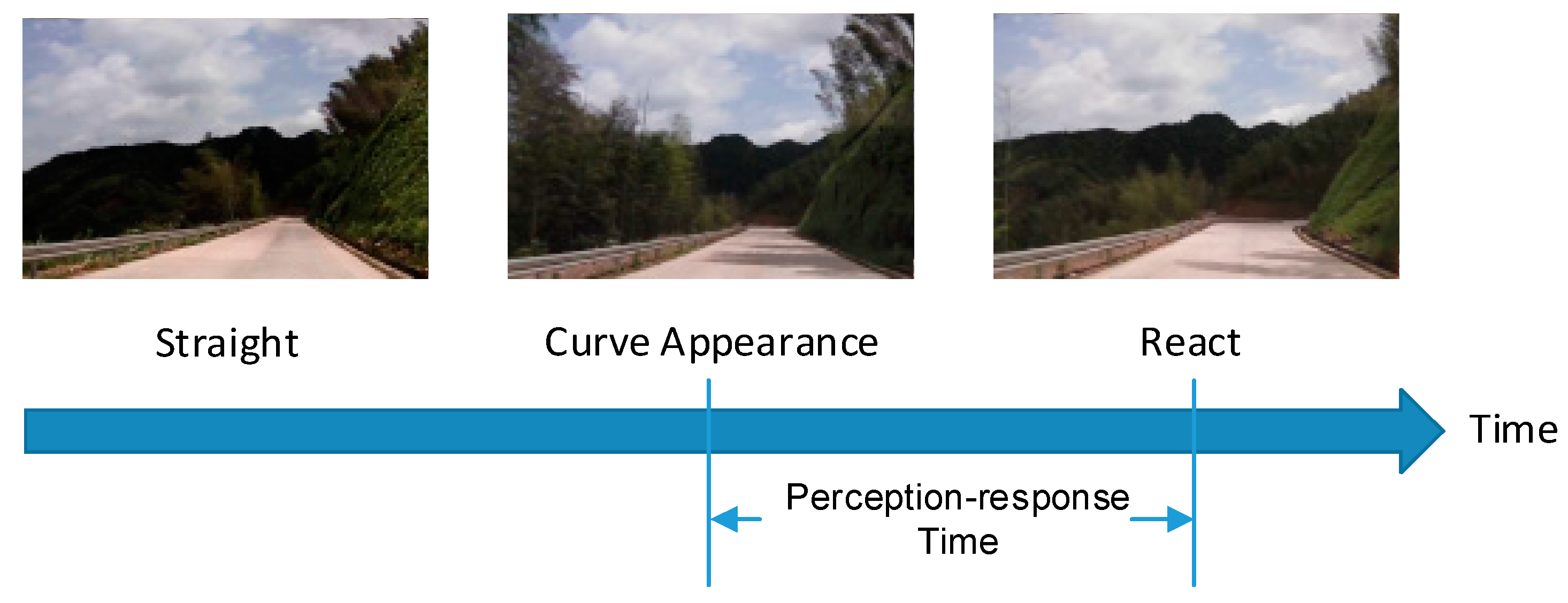
This research, as a further study, focuses on mountain highway curves in China where most accidents happened in 2014 among three kinds of highways curves: plain (3875 accidents), hill (3981 accidents), and mountain (6038 accidents) [
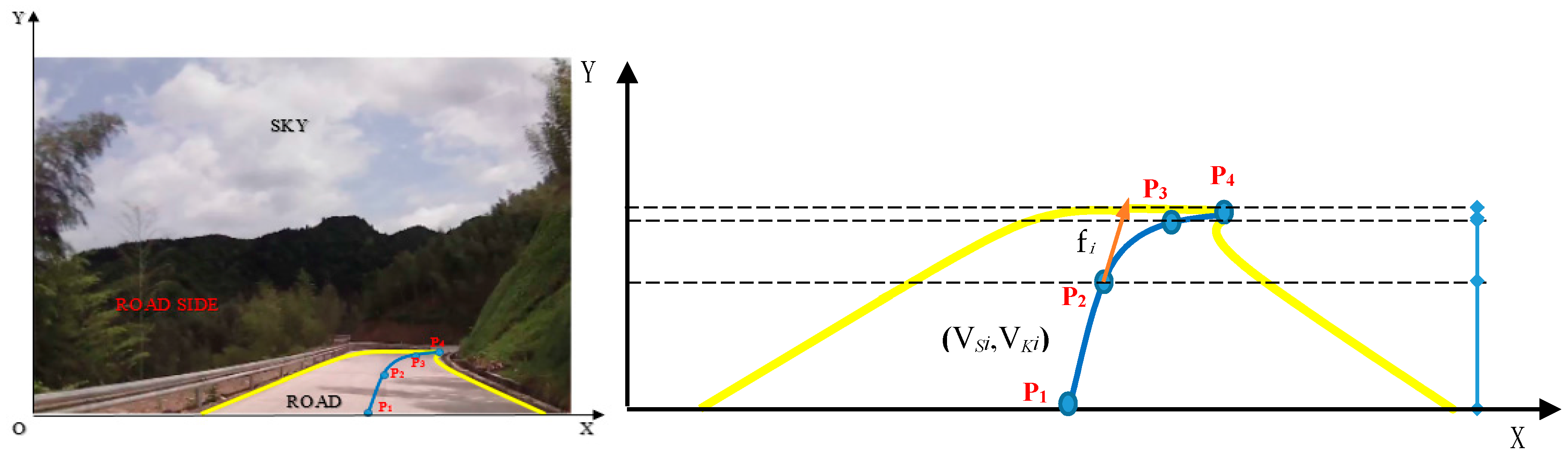
22]. Different from the definition of perception-response time (PRT) in Olson and Sivack’ theory, the PRT in this study focused on “left/right curve” rather than “obstacle”. The PRT in their theory is an important component of stopping sight distance on a vertical curve (e.g., cresting a hill) to avoid collision. However, in this research we predict drivers’ response time from the curve appearance until the first reaction, during which they do not need to stop, but to drive safely. For the different driving purpose, we do not apply their theory in our PRT definition or prediction model which is only serves as a hint or piece of evidence for us to improve Chinese current national standard. The inner relationship between road information obtained by a driver’s vision and the perception-response time on a mountain highway curve is discussed. Based on on-board video, Catmull-Rom spline describes the driver-vision lane and corresponding elements are extracted. These visual factors and mechanical factors are then used in a multinomial log-linear model via neural network, which has also been verified with a series of field tests. This work serves as the basis of human-like ADAS that takes actual perception-response time into consideration.
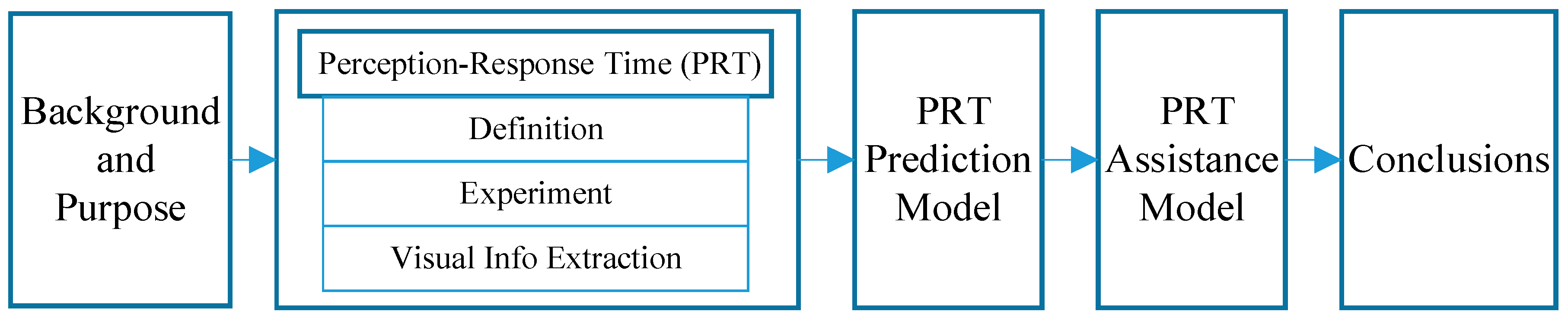
This paper consists of five sections as shown in
Figure 1.
The first section introduces the background and purpose of this study. The second section illustrates the definition of PR time in this research. The experiments data and visual information are also explained. The third section builds a multinomial log-linear prediction model for PR time. A corresponding assistance model is also established and tested in the fourth part. The last section concludes the key points of this study.
3. Perception-Response Time Prediction Model
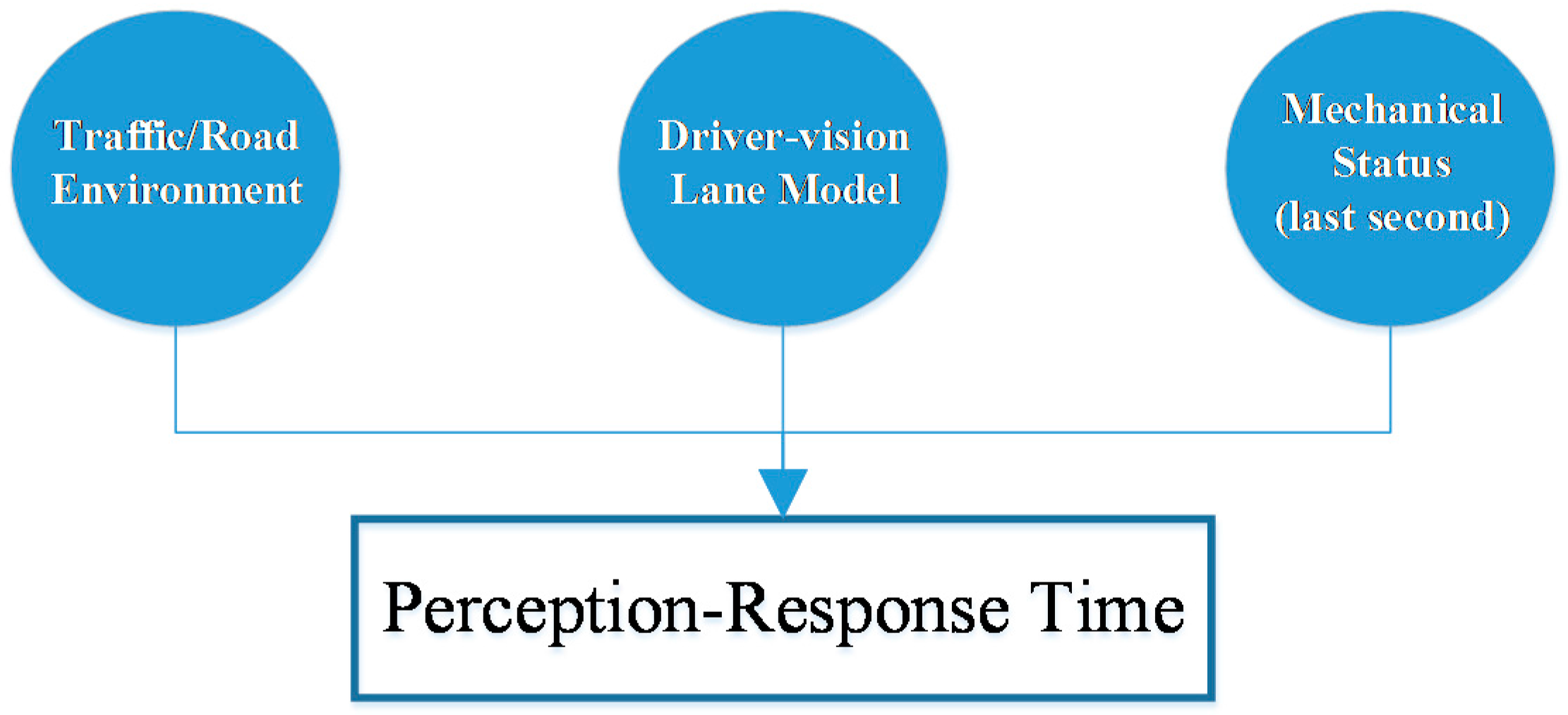
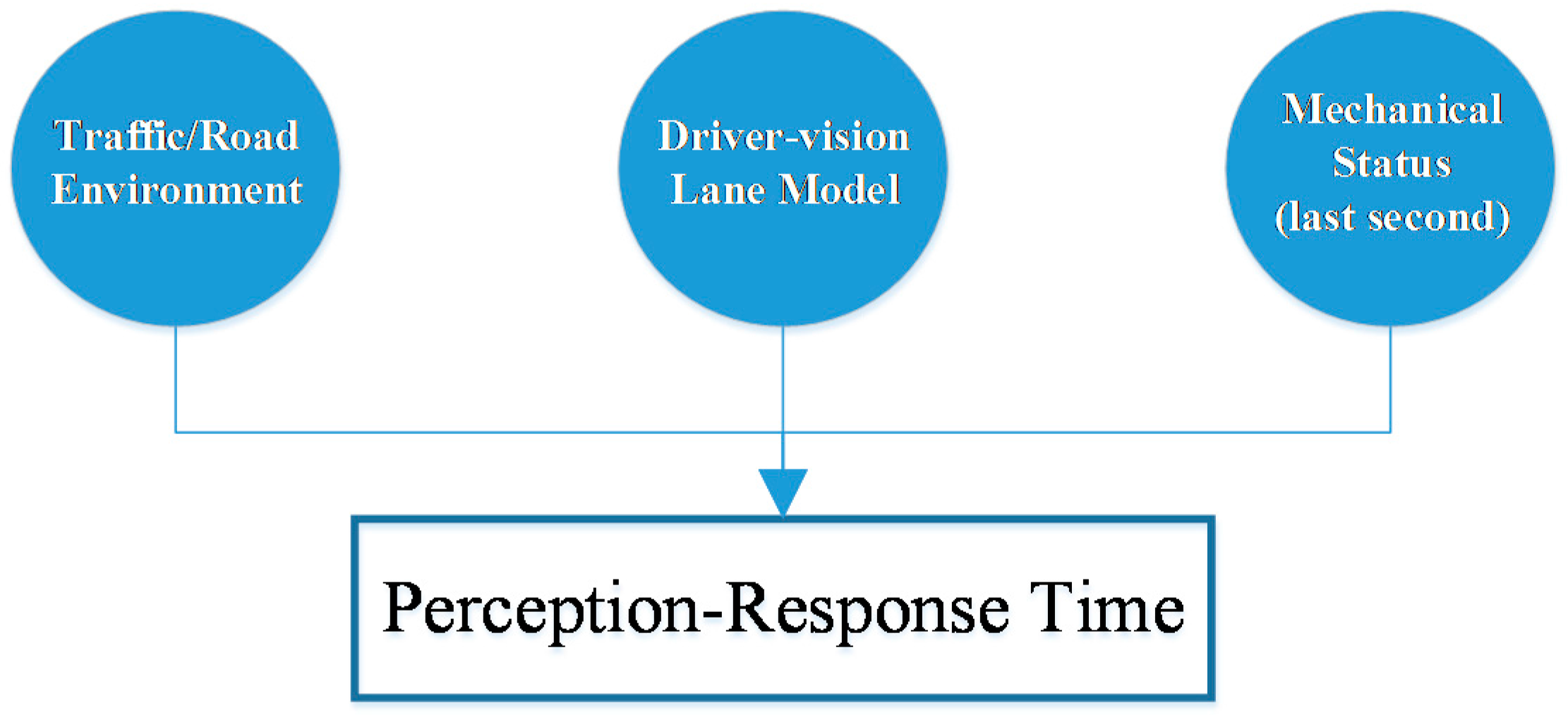
In this study, a driver’s perception-respond (PR) time is predicted by three parts: traffic/road environment information, driver-vision lane model, and mechanical status (last second). Traffic/road environment is a uniform factor for each driver. It provides drivers with similar driving tasks. However, similar or even the same curve conditions did not result in the same PR times according to the tests. This means there are some other factors effecting drivers’ PR processes, such as the driver-vision lane model. It is the impact of lane alignment on drivers, and last second speed and acceleration adjustment is another facet considered in the prediction model.
In
Figure 6, the three parts all have a certain impact on drivers’ PR times, for drivers’ responses depend on some knowledge: what are the environmental conditions (traffic/road environment), what is the shape of the next curve (driver-vision lane model), and what is the status of the vehicle (mechanical status). Detailed parameters of these three parts are listed in
Table 5.
A multinomial log-linear model via a neural network can be established to quantify the weights of the parameters above. After 790 iterations, the converged model results are shown in
Table 6.
The model provided here is a multinomial log-linear regression model based on one-hidden-layer neural network. The
p-value is an index of the multinomial log-linear model, which is a post-calculated value. AIC is Akaike Information Criterion, which is used as a measure of the relative quality of statistical models for a given set of data. In this model,
and
of driver-vision lane have the most significant impact on drivers’ PR times, especially on the PR times during 2~3 s and >3 s. Compared with
,
shows a greater determining effect on PR time. Although it shows a negative impact on the third category, one unit change (Odds Ratio [
28]) of it would result in the most significant change on PR time compared with other factors. Hence
is a determining factor. A large
would lead to a sharp drop in drivers’ PR times. Highway access is the third important factor which would result in lower PR times (<3 s). Among the protective roadside marking and infrastructure, warning pier is the most effective way to guide drivers. The existence of corrugated-steel guardrails has a negative impact on PR times over 1 s, so that they would accelerate the PR process. Concrete guardrails and traffic markings/signs have similar low influence on PR times. Each additional opposite vehicle results in additive negative effects. This means that a high volume of opposite traffic increases driving task difficulty and decreases PR times. All the distance of curve appearance parameters are positive, and they have larger impacts on longer PR time. This conforms to common knowledge. However, curve distance between 30 m–50 m has a greater positive influence on both short and long PR time compared with curve distance over 50 m. This reveals that drivers responded dispersedly in such circumstance. PR times increase with large longitudinal impact force (steep slope) and decrease with vertical impact force (rough road surface). This shows the impact of road geometry on drivers’ PR times. Drivers’ real-time operation consists of speed and acceleration changing rate, but they are not significant in the prediction model.
5. Conclusions
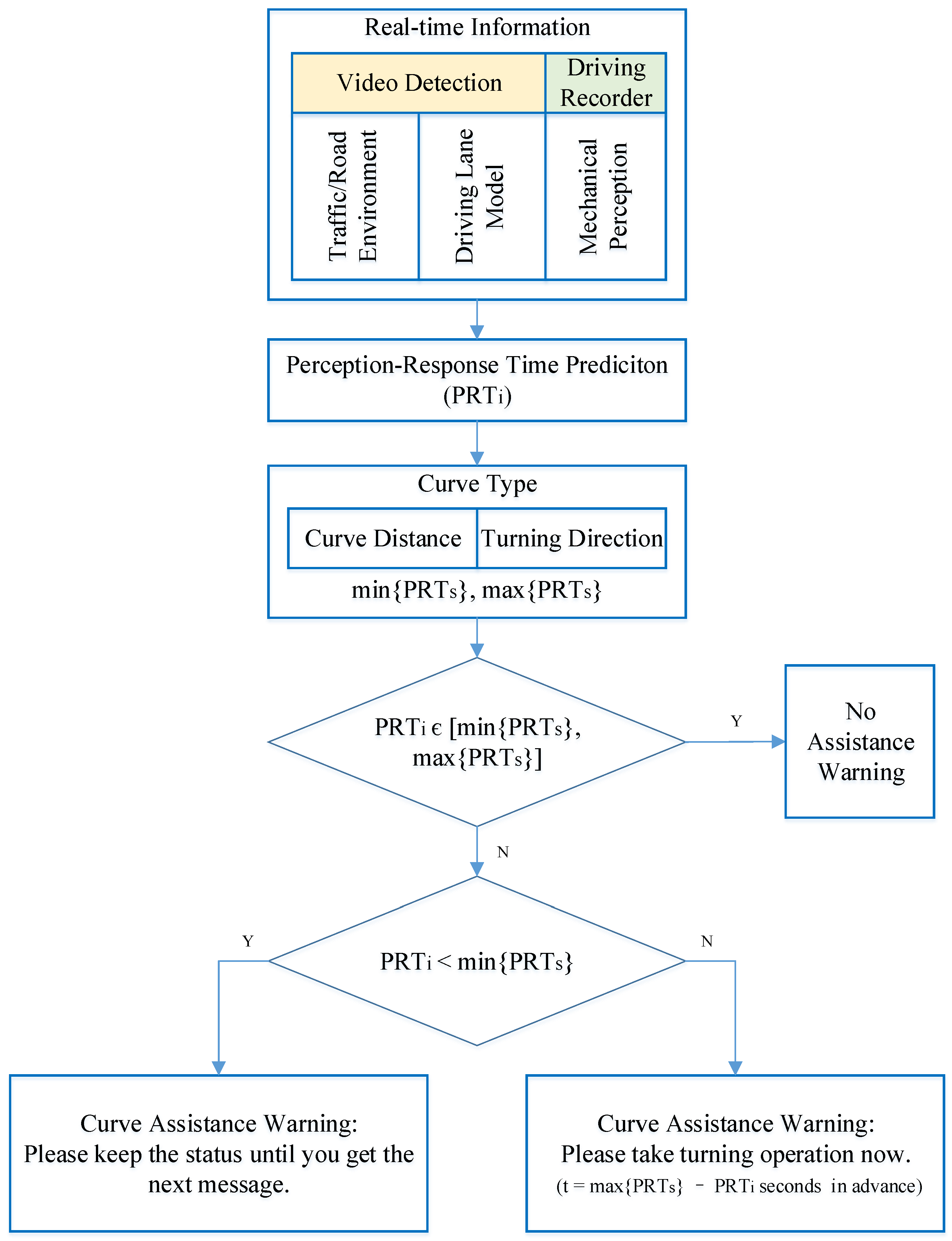
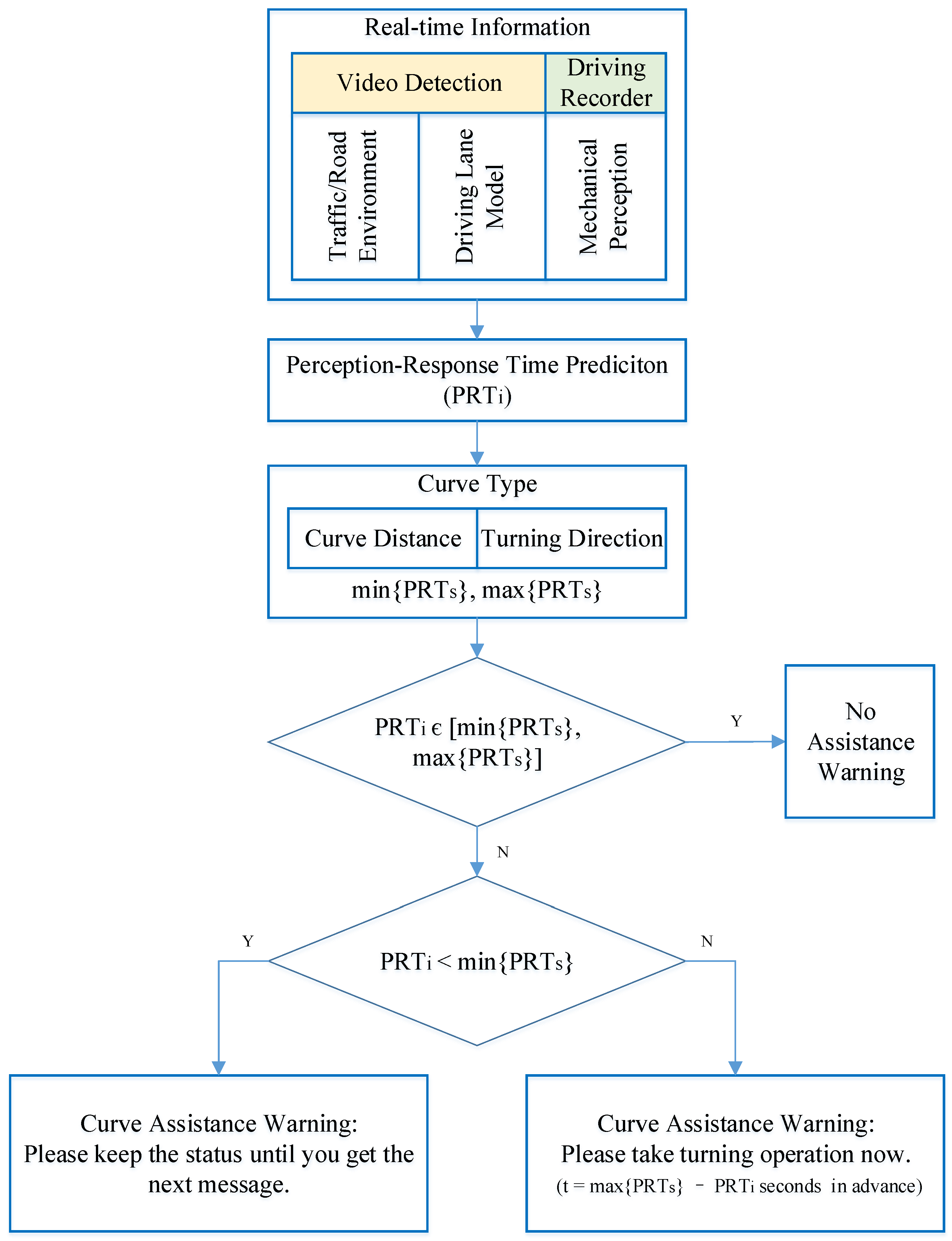
This study defined the concept of perception-response time (PR time) on mountain highway curves. Field tests were conducted with a driving recorder to record drivers’ real-time driving data both before and during the turning process. As drivers’ visual information is an important factor in perception-response time prediction in this study, driver-vision lane model was used to extract the elements of visual information from the sight of the drivers. To predict the perception-response times, a multinomial log-linear prediction model with the elements of traffic/road environment, driver-vision lane model, and mechanical status was presented. A corresponding assistance model was also illustrated to help drivers to have more proper perception-response times on mountain highway curves.
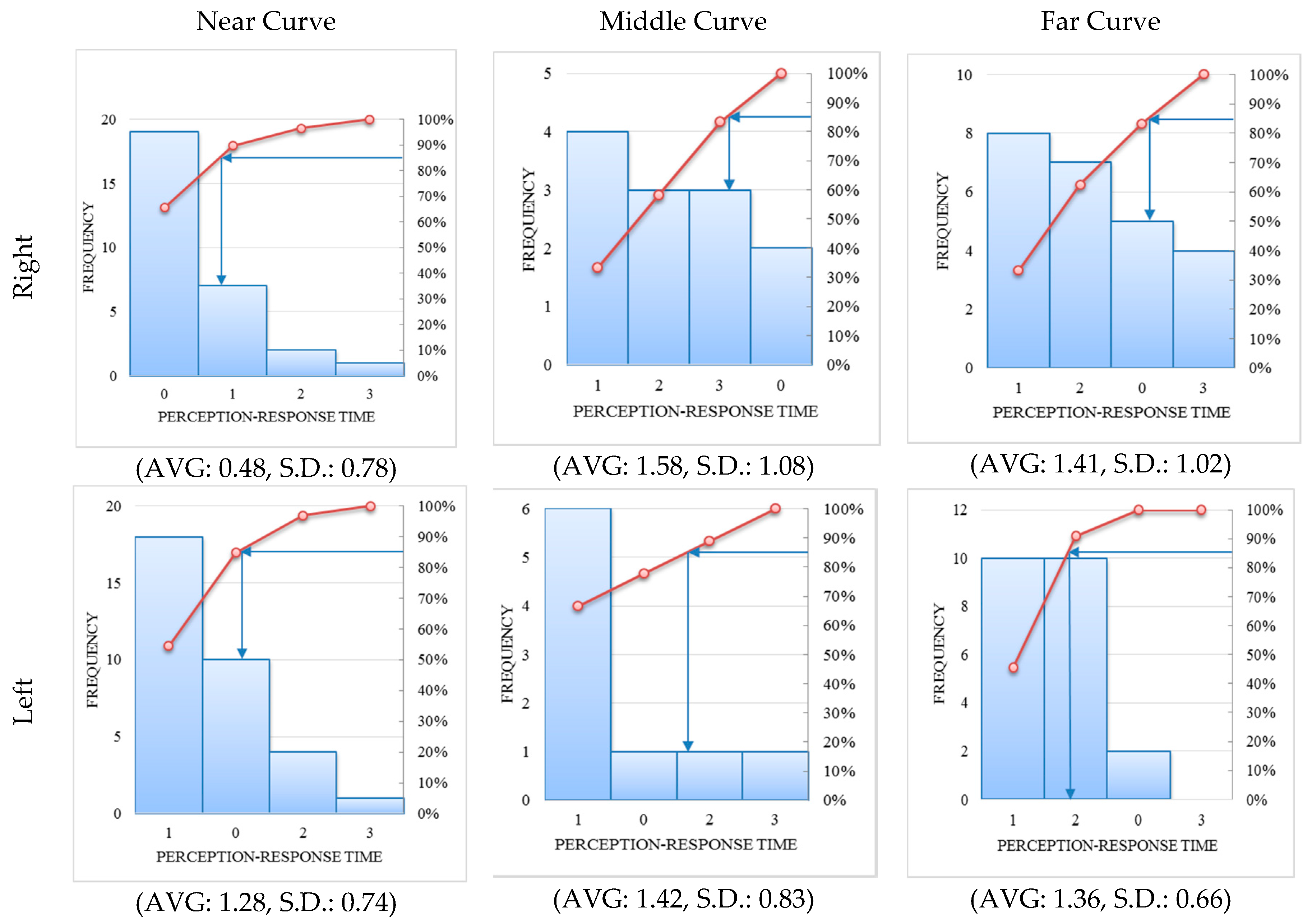
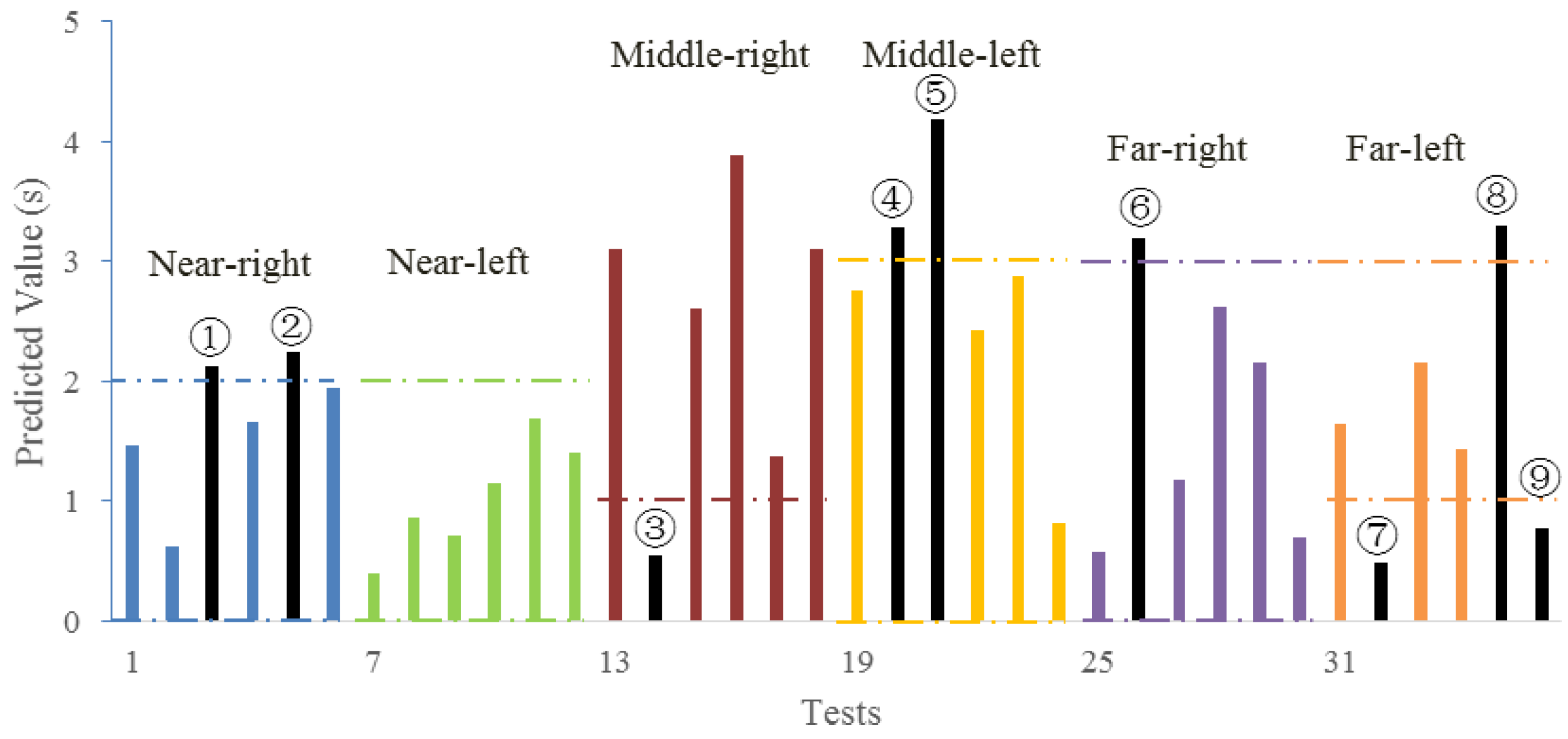
The results showed that the same road situation could result in various understandings regarding the interpretation of perception-response times in this work. Compared with the length of driver-vision lane, curvature rate (especially ) had more impact on PR times. This indicates that drivers’ PR process is mostly based on the visual information integrality of curves. Uncertainty of the curve shape and curvature rate will lead to uncertain PR times, such as observed with the middle curve (middle-VAR: 1.162, near-VAR: 0.609, far-VAR: 0.826). Meanwhile, the effect of road safety infrastructure are less significant than that of driver-vision lane elements. Therefore, good road visual geometry is more effective than passive road safety infrastructure in driving behavior guidance.
On the other hand, this study verified the need for establishing a personal-targeted assistance model, which took drivers’ personal behavior and visual information into consideration. This is more humanized than a traffic-rule-based system. Although the model in this study has been proven valid, the absolute data and the meaning obtained should be considered only as relative result [
29] due to the limitation of low-frequency data. More high-frequency and accurate biological information detectors would contribute to future studies. The change of eye gaze position/area would also help to illustrate drivers’ different perception processes to establish a more personalized assistance system. In the future, complex driving behavior and driver-based decision processes will be analyzed and quantified.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}