Anchor-Free Localization Method for Mobile Targets in Coal Mine Wireless Sensor Networks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Estimate the coordinates of the reference nodes. Several methods for this process have been proposed. Meerens and Fitzpatrick use one-hop neighbors and multilateration to construct a global coordinate system [6]. Shang and Ruml use multi-dimensional scaling (Multi-dimensional Scaling: MDS) to realize localization, which has drawn much attention recently [7].
- Water-vapor and coal dust will potentially absorb the wireless signal in different ways and lead to large localization errors.
- The complex terrain and irregular network topology in underground mines make many localization algorithms do not work well.
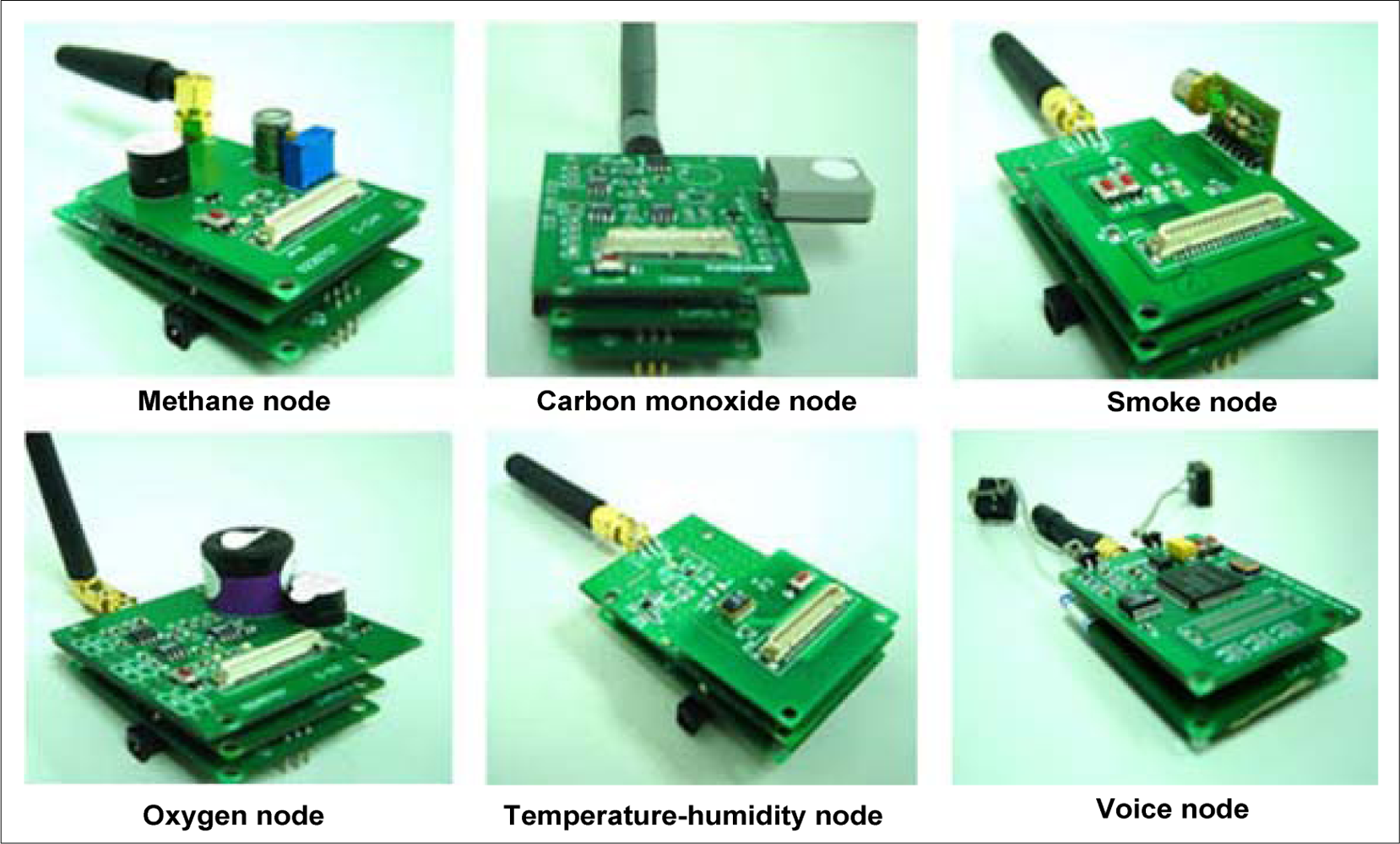
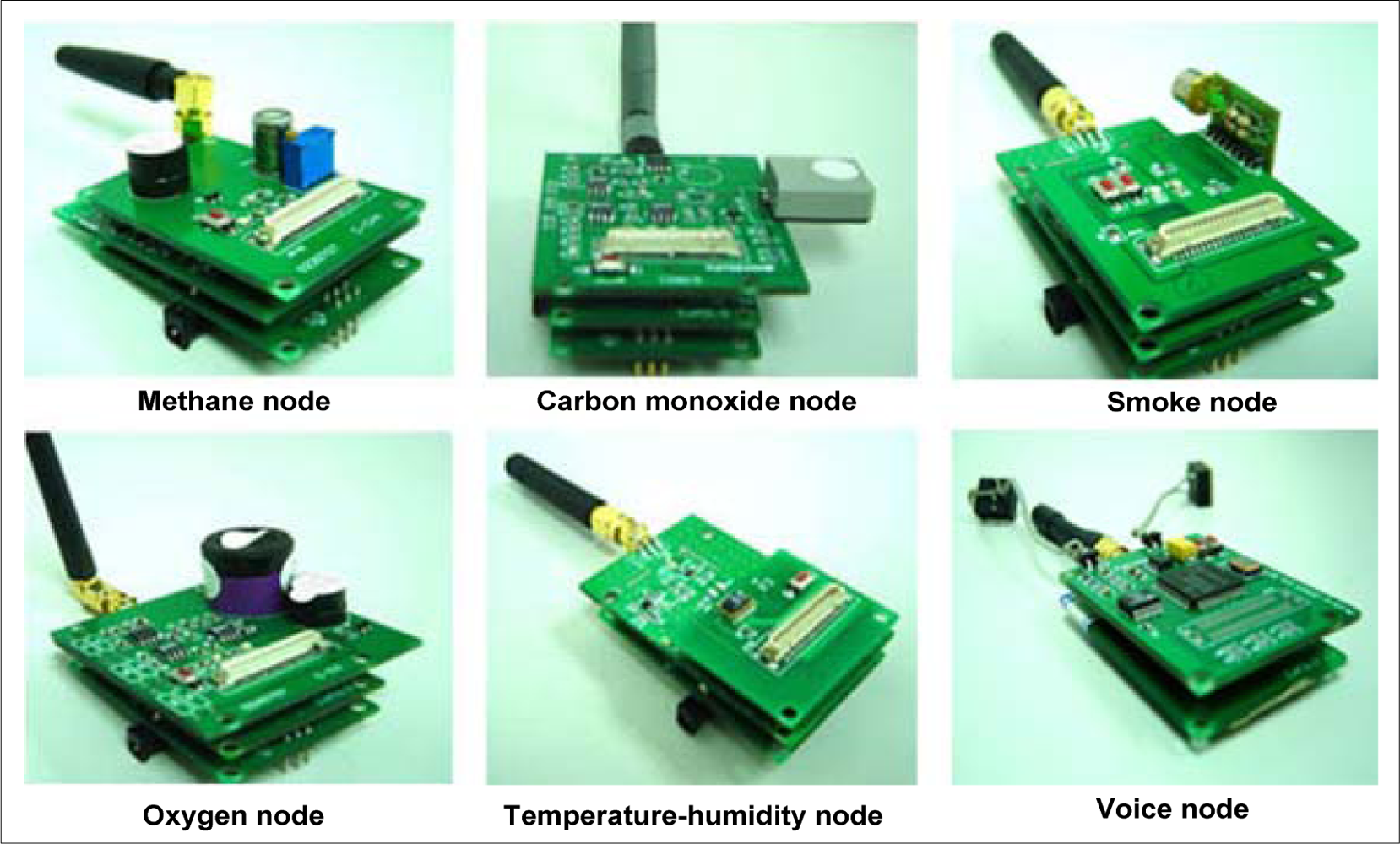
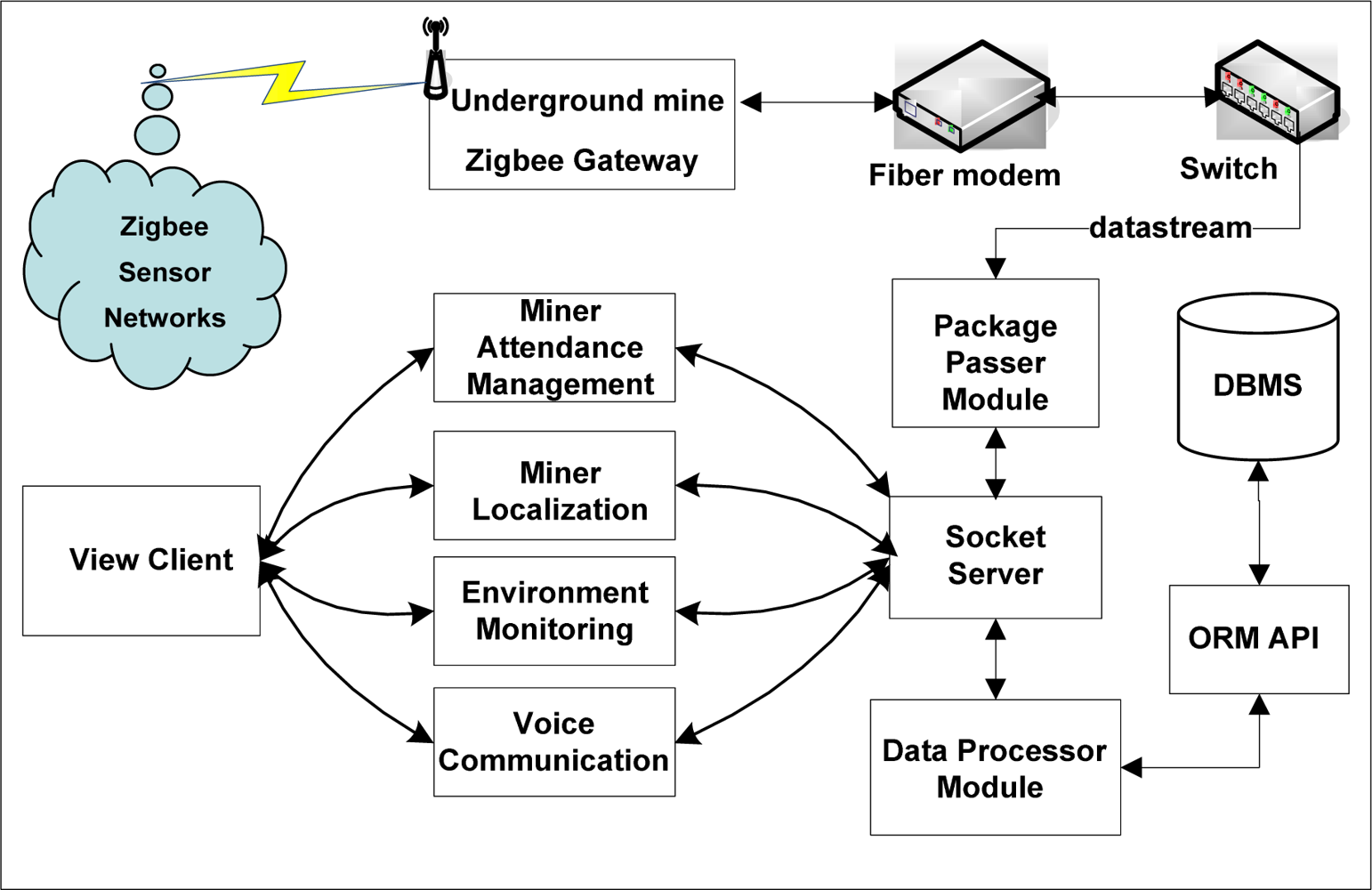
- A coal mine wireless sensor network is constructed in underground mines based on the ZigBee technology.
- Non-metric MDS algorithm is introduced into the estimation of the reference nodes’ location, which provides higher fault-tolerance ability.
- An improved SBL algorithm, N-best SBL, is proposed to improve the localization accuracy.
2. Preliminaries
2.1. Non-metric MDS algorithms
- Step 1: Initialize the node’s coordinate Ri and the number of iterations k:
- Step 2: For all node pairs, compute their Euclidean distances:
- Step 3: For and RSS matrix W, calculate the matrix using step-wise monotone regression by Equation 2 and Equation 3, i.e. for ∀i, j, u, v,
- Step 4: Compute the stress defined by the Equation (4). If stress < ε (here ε = 10−4), then finish; Otherwise continue to Step 5.
- Step 5: Update k ← k + 1, and compute the new node coordinates as follows:where α is the iterative step. Then return to Step 2.
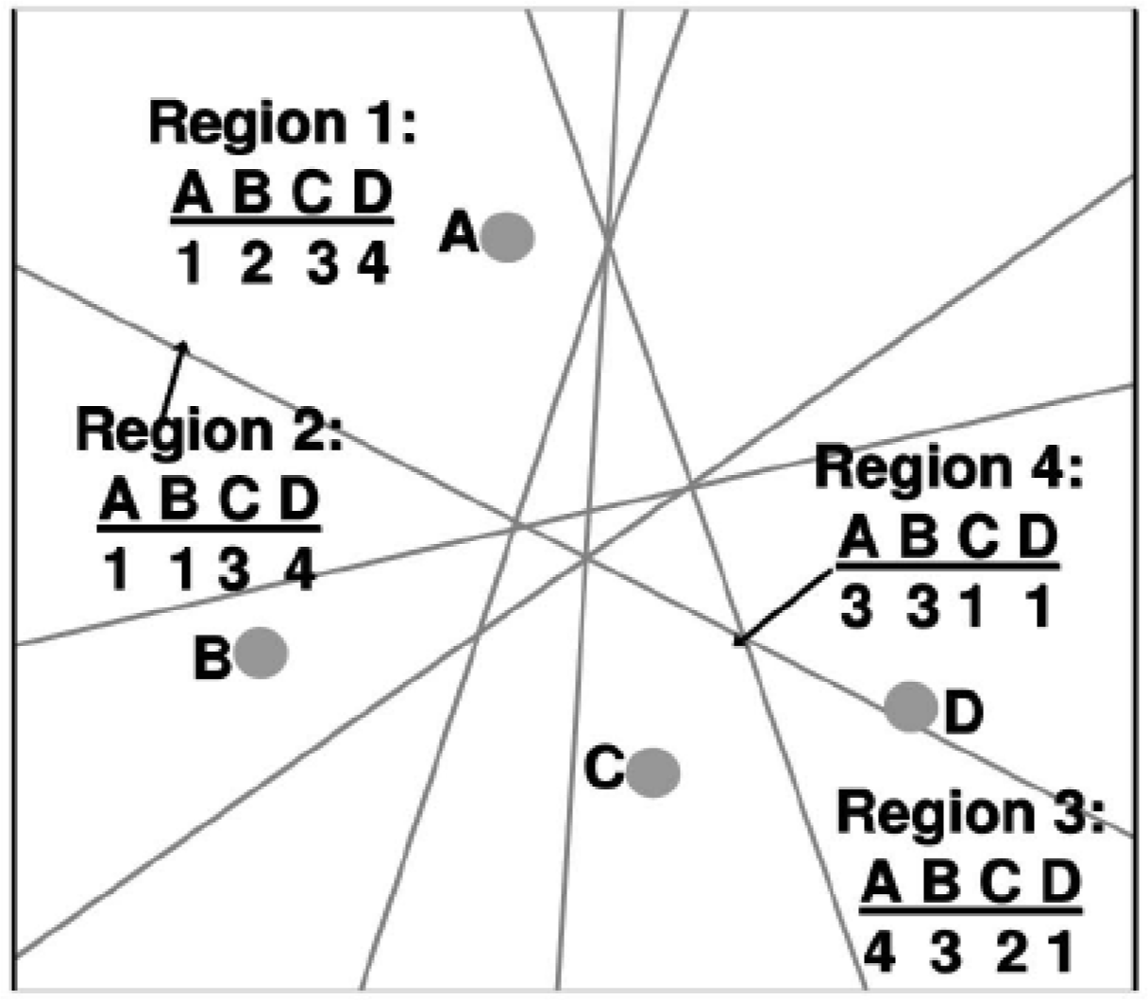
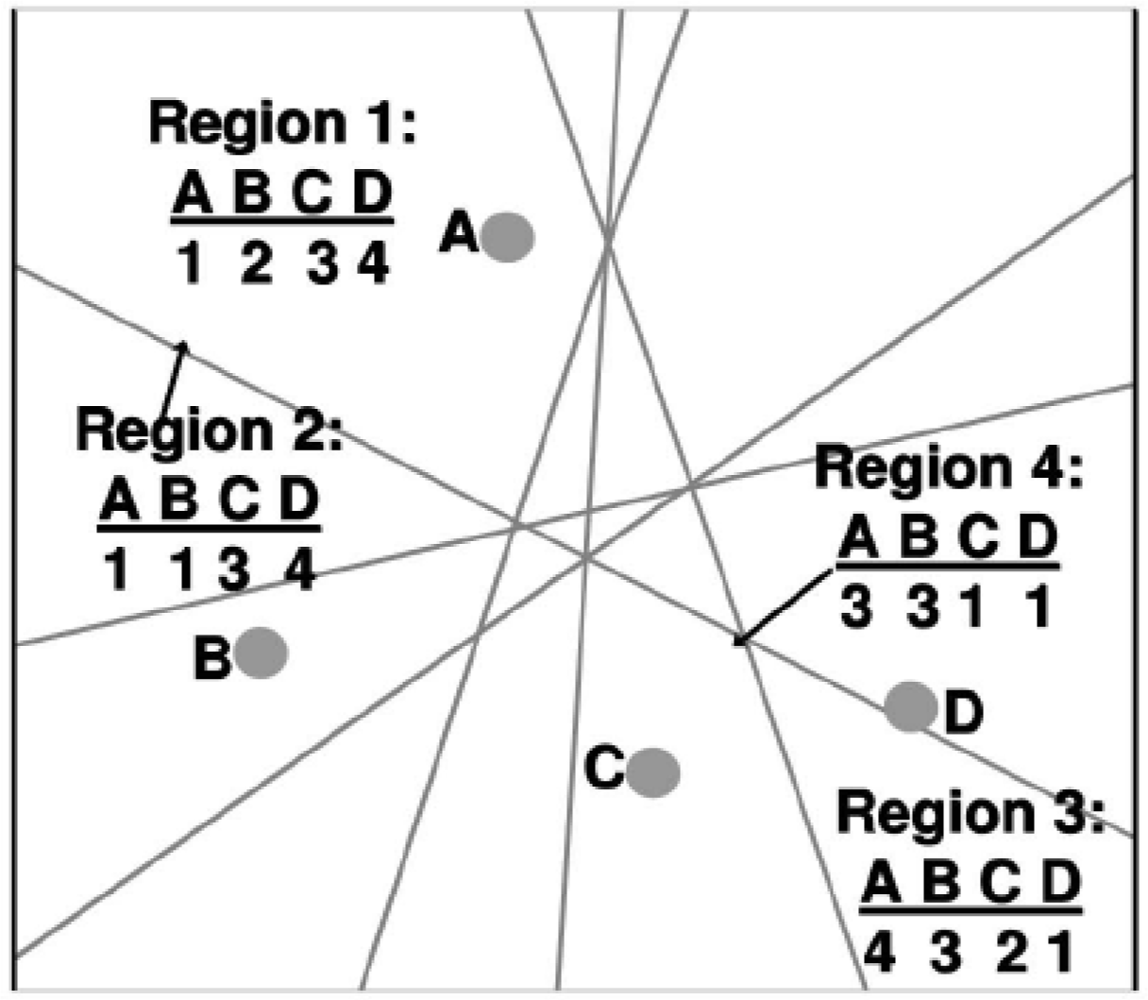
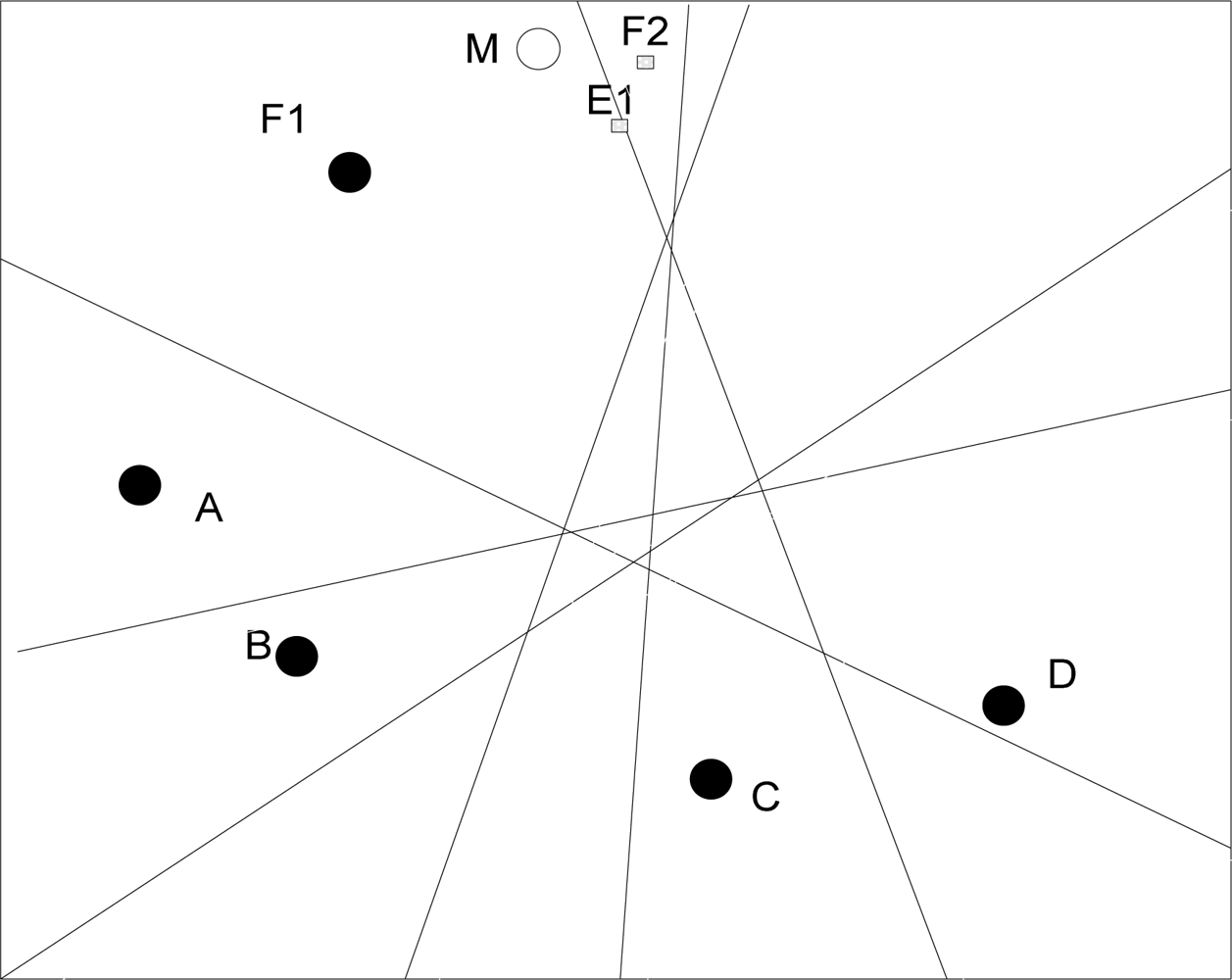
2.2. Sequence-based localization
- Determine all feasible location sequences in the localization space and store them in a location sequence table.
- Obtain the location sequence of the mobile node by measuring RSS.
- Search the location sequence table for the “nearest” sequence to the location sequence of the mobile node.
- Take the centroid of the region, which is presented by the “nearest” location sequence, as the position of the mobile node.
3. Anchor-Free Localization Method in C-WSN
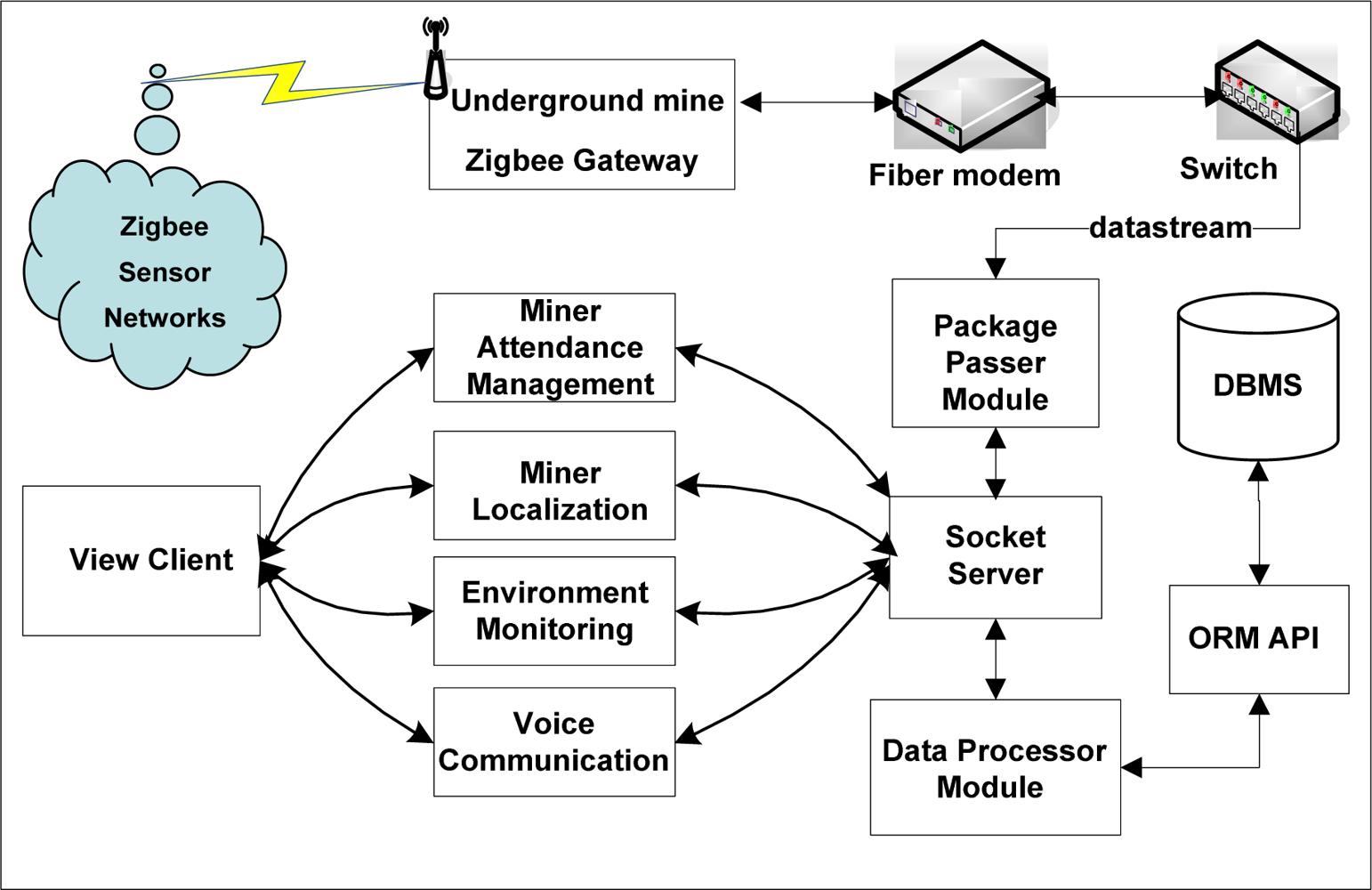
3.1. Coal mine wireless sensor networks
3.2. Anchor-free localization algorithm in C-WSN
- After C-WSN was established, static ZigBee router nodes start up the non-metric MDS algorithm and then complete the estimation of coordinates with few anchor nodes.
- With the estimated coordinates of static router nodes, mobile nodes finish the precise localization process by executing the N-best SBL algorithm.
3.2.1. Non-metric MDS algorithm for static router nodes
- Step 1: After joining the network, all reference nodes broadcast one-hop RSS request message. The neighbor nodes measure the RSS value between them and report the response message to the sever through the gateway.
- Step 2: The sever starts up the Dijkstra's shortest path algorithm to construct the RSS relationship matrix for every pair of nodes, which is the input to the non-metric MDS.
- Step 3: Finish the non-metric MDS algorithm process to obtain the relative coordinates of all reference nodes.
- Step 4: Compute the absolute coordinates through shifting, translating, rotating and/or reversing with anchor nodes.
3.2.2. Precise localization for mobile targets based on N-best SBL algorithm
- Mobile targets broadcast one-hop RSS request messages at fixed time cycle. After receiving the messages, reference nodes calculate RSS values between them and report them to the server through gateway.
- The server reads the coordinates information of related reference nodes, starts up N-best SBL algorithm, and obtains the position coordinates of mobile node.
- Return to step (1), repeat the localization process with different reference nodes.
- Step 1: Estimate the parameters η and σ in Equation 11 by linear regression and maximum likelihood methods based on the RSS information of reference nodes.
- Step 2: Construct the location sequence table T = {S1, S2, …, S|T|} from reference nodes.
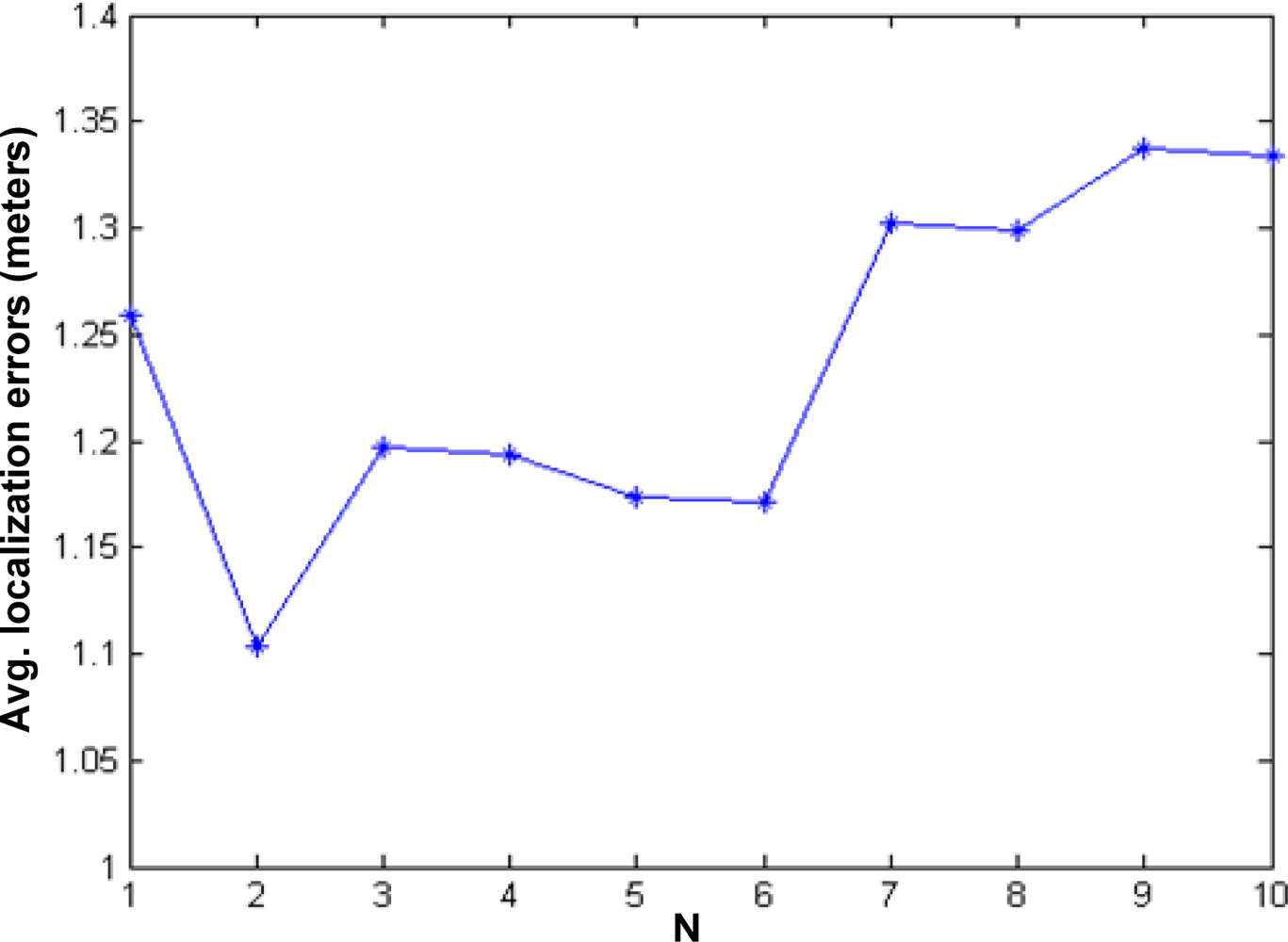
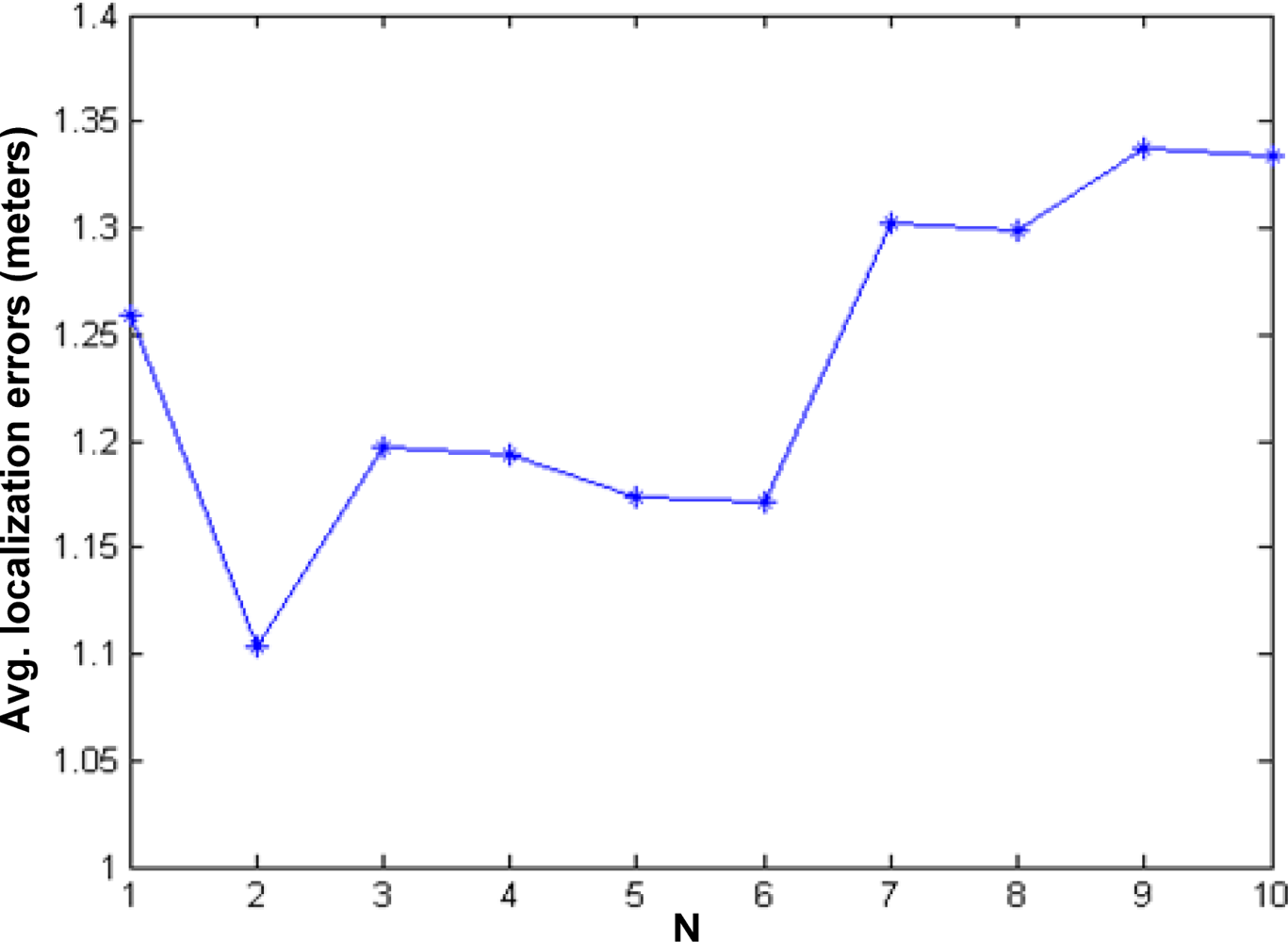
- Step 3: Estimate the optimal N value, denoted as N*.
- Step 3.1: Generate a number of virtual nodes DN randomly according to a uniform distribution in the area bounded by B.
- Step 3.2: Loop for each N in N val = {1, 2, …, 10}.
- Step 3.2.1: Loop for each node (x, y) ∈ DN.
- Step 3.2.1.1: RSS values with reference nodes are simulated by Equation 11, thus a corresponding rank sequence S is obtained.
- Step 3.2.1.2: Calculate correlation coefficients, τ (Si), i = 1, 2, …, |T |, between S and each rank sequence Si in T according to Equation 12:where nc is the number of concordant pairs, nd is the number of discordant pairs, nts is the number of ties in S, and ntt is the number of ties in Si.
- Step 3.2.1.3: Sort T by correlation coefficients in descending order, and then select top N rank sequences from T, denoted as TN.
- Step 3.2.1.4: Estimate the coordinates by Equation 13,where N (T) is the number of sequences in TN, and Ci is the centroid coordinates of the region represented by Si.
- Step 3.3: Calculate the average location errors for virtual nodes by Equation (14):where R is the radius of communication.
- Step 3.4: The optimal N value is denoted as follows:
- Step 4: For any mobile target, measure RSS values with reference nodes and obtain a corresponding rank sequence S firstly. Then complete one precise localization process based on Step 3.2.1.2 to Step 3.2.1.4.
4. Experimental Results
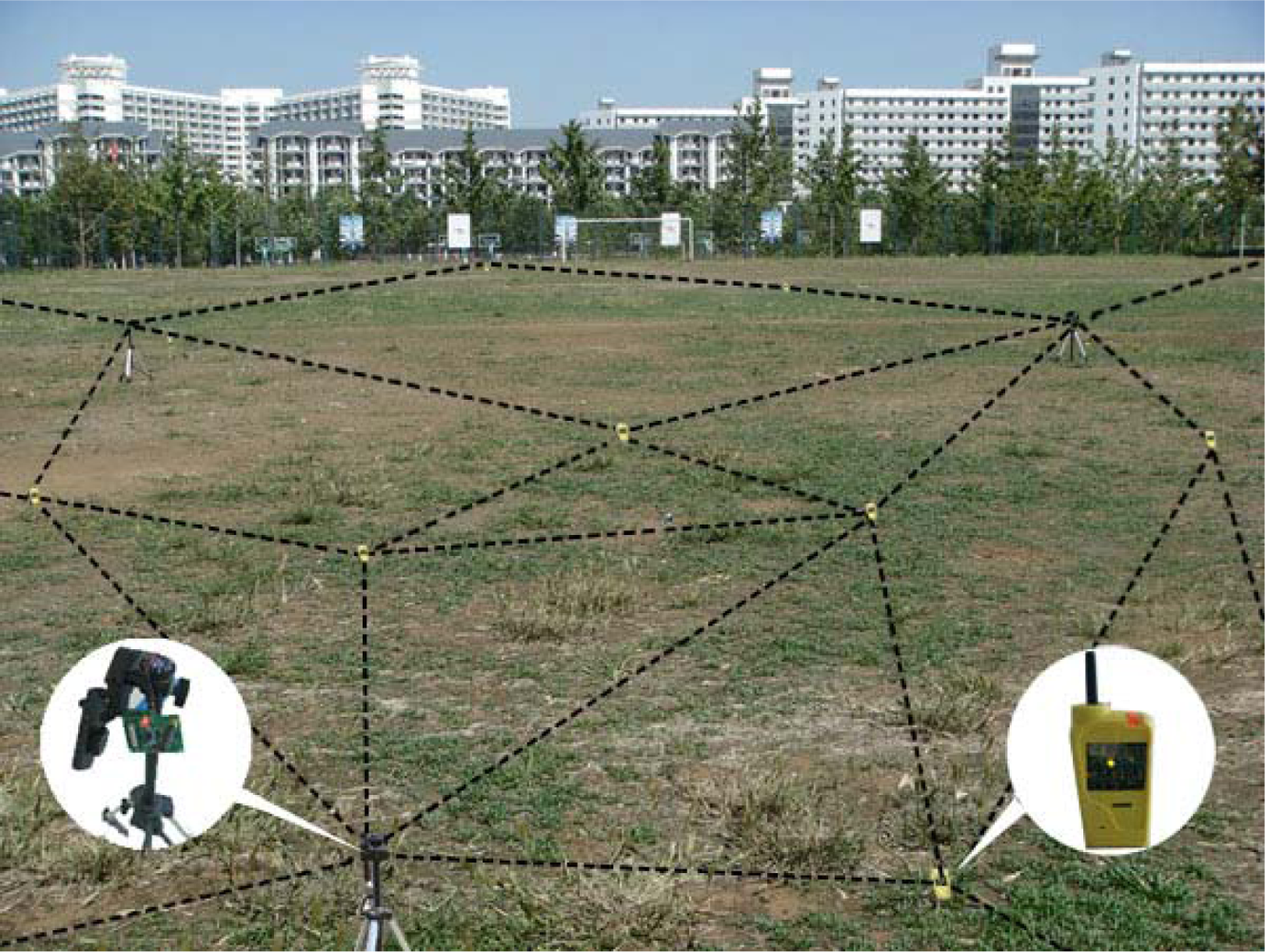
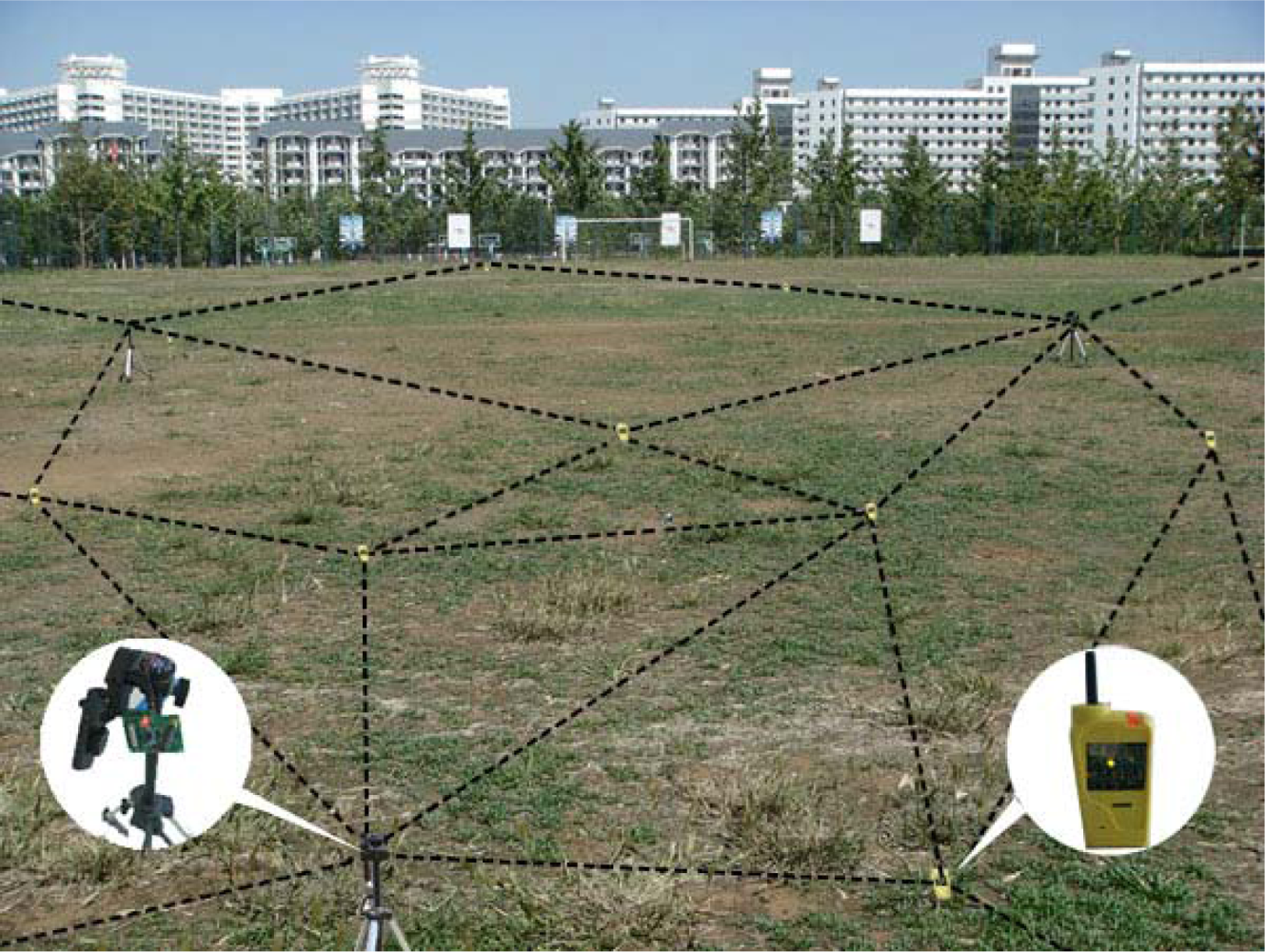
- Firstly, outdoor experiments with 15 real Cicada nodes were carried out to test the performance of the non-metric MDS algorithm..
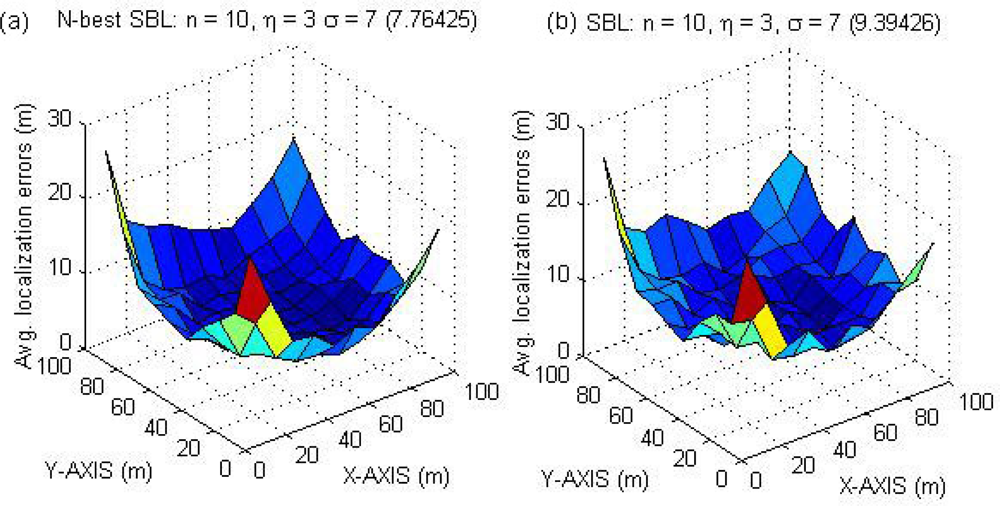
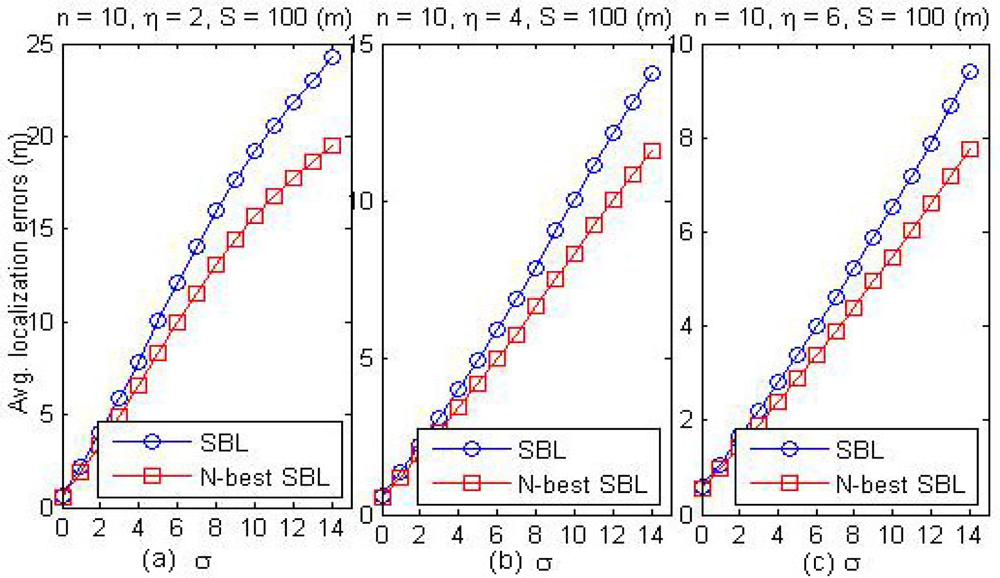
- Secondly, 10,000 repeats of simulation experiments with 100 nodes were finished to compare the performance between the N-best SBL algorithm and the original SBL algorithm.
- Finally, the experiments in the mine gas explosion laboratory with our anchor-free localization algorithm were executed to test the whole localization performance.
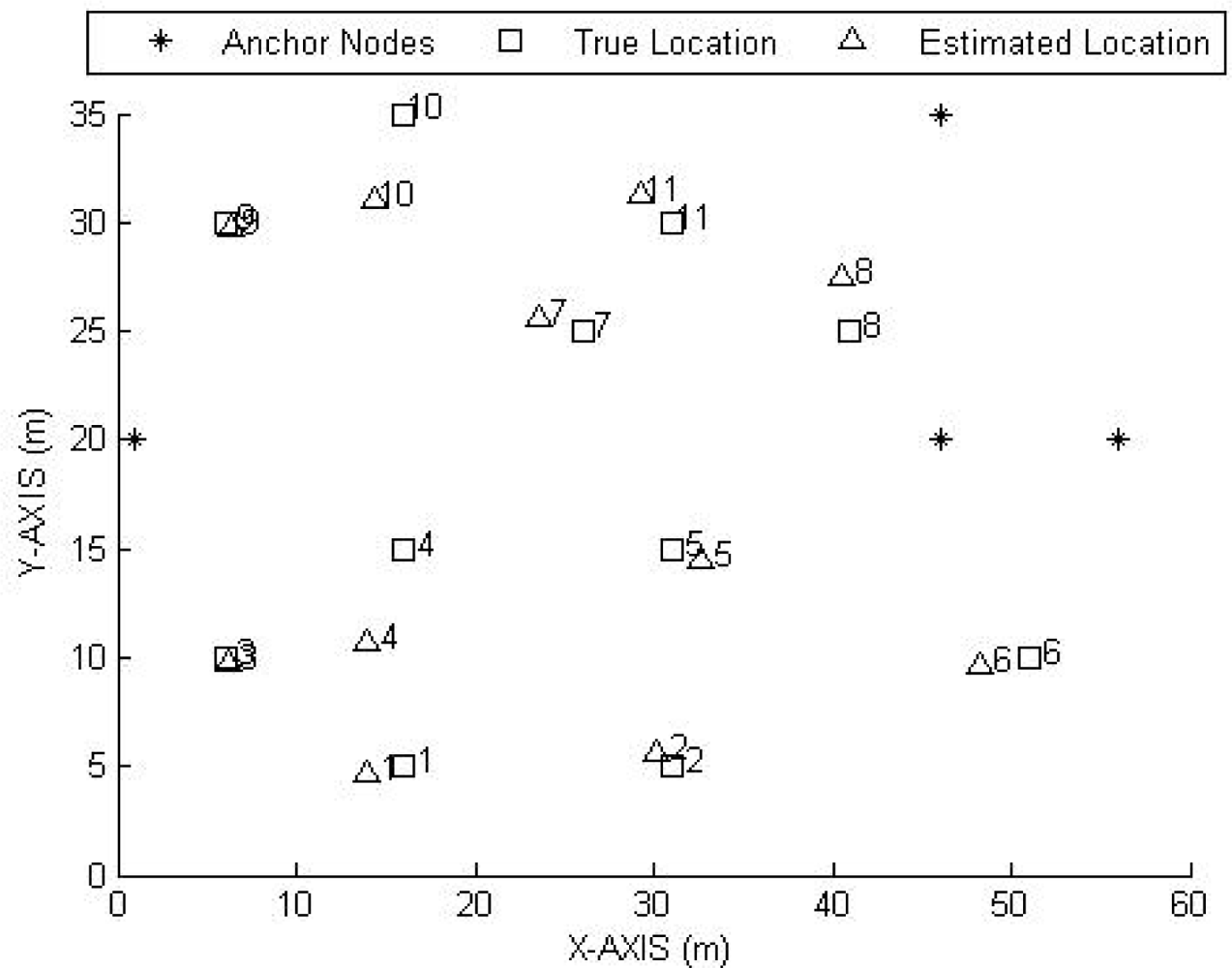
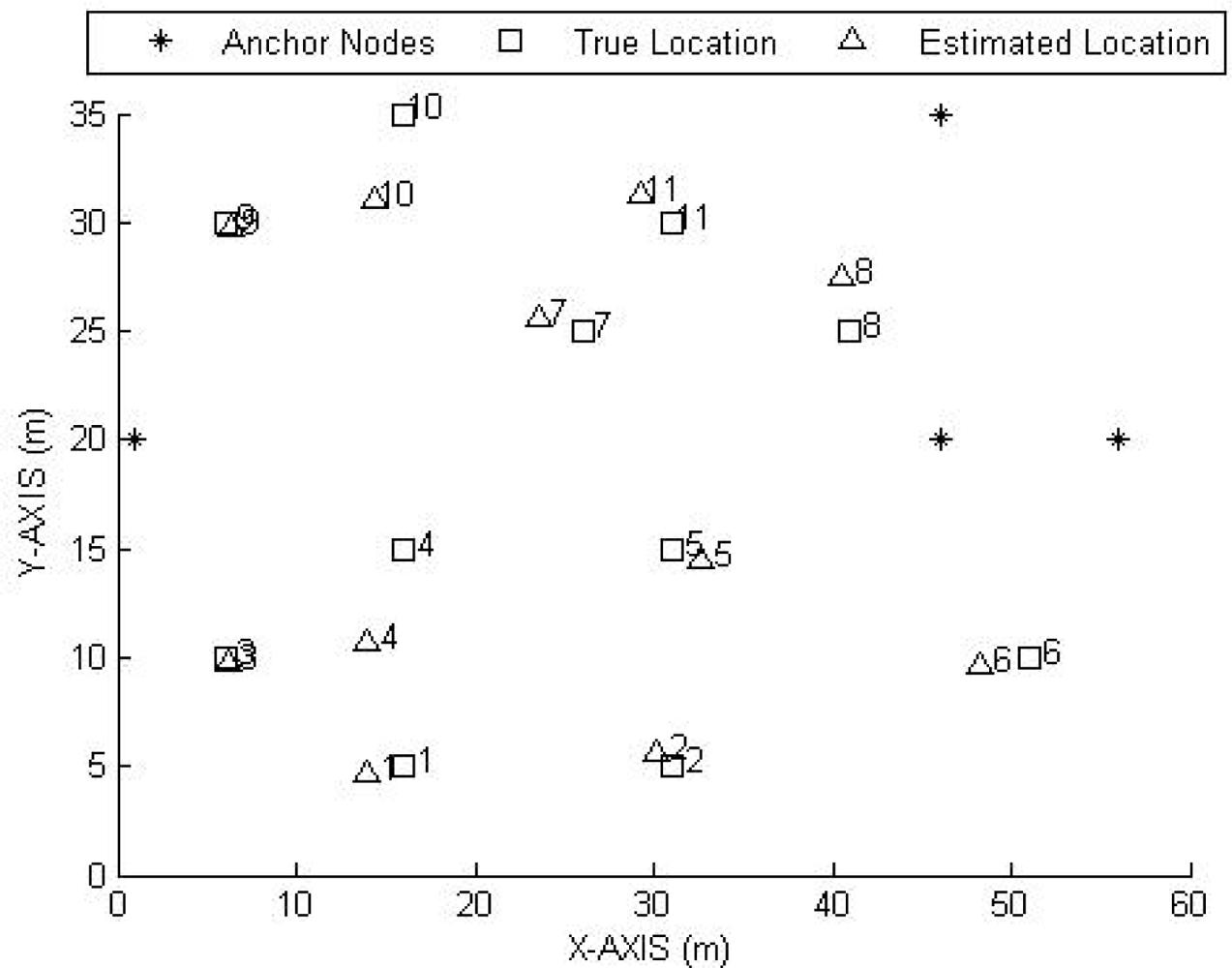
4.1. Outdoor experiments for non-metric MDS
- Measure the real location coordinates of the 15 nodes after deployment.
- All the nodes broadcast one-hop RSS request message. The neighbor nodes report the response messages to the server.
- Construct the RSS relationship matrix for all the nodes in the server.
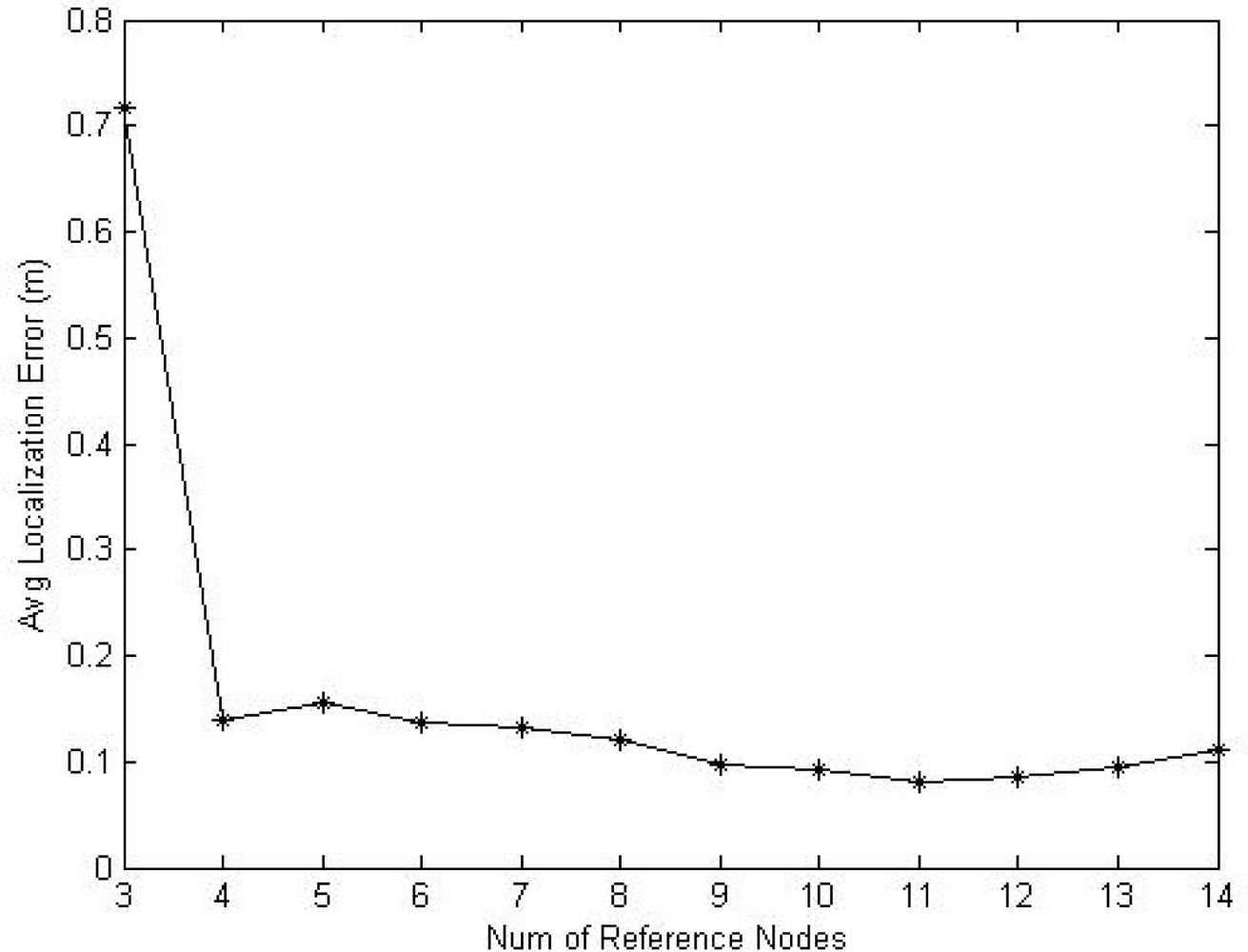
- Choose m reference nodes (m = 3, 4,…14) as anchor nodes randomly, run the non-metric MDS algorithm and estimate the location coordinates for all the nodes according to the RSS relationship matrix.
- Compute localization errors of the non-metric MDS algorithm according to Equation 14. For each m, 15 runs are conducted and then the total average localization errors are obtained.
4.2. Simulations for N-best SBL
4.3. Experiments in the laboratory of mine gas explosion for anchor-free localization algorithm
5. Conclusions
Acknowledgments
References and Notes
- Kennedy, G.A. High resilience wireless mesh networking characteristics and safety applications within underground mines, Ph.D. Dissertation,; University of Exeter: Devon, UK, 2006.
- Mohanty, P.K. Application of wireless sensor network technology for miner tracking and monitoring hazardous conditions in underground mines. Available online: http://www.msha.gov/regs/comments/06-722/AB44-COMM-95.pdf. (accessed July 22, 2006).
- Multimedia Systems Lab. Real-time wireless sensor network platform. Available online: http://www.ece.cmu.edu/~firefly/projects.html. (accessed January 12, 2007).
- Xia, F.; Tian, Y.; Li, Y.; Sun, Y. Wireless sensor/actuator network design for mobile control applications. Sensors 2007, 7, 2157–2173. [Google Scholar]
- Priyantha, N.B.; Balakrishnan, H.; Demaine, E.; Teller, S. Anchorfree distributed localization in sensor networks. Proceedings of 1st International Conference on Embedded Networked Sensor Systems (SenSys), Los Angeles, CA, USA, November 5, 2003; pp. 340–341.
- Meertens, L.; Fitzpatrick, S. The Distributed construction of a global coordinate system in a network of static computational nodes from inter-node distances; Technical Report, Kestrel Institute: Palo Alto, CA, USA, 2004; Available online: ftp://ftp.kestrel.edu/pub/papers/fitzpatrick/LocalizationReport.pdf. (accessed November 24, 2008).
- Shang, Y.; Ruml, W. Improved MDS-based localization. Proceedings of the Twenty-third Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM'04), Hong Kong, China, March 7–11, 2004; 4, pp. 2640–2651.
- Kwon, O.K.; Song, H.J. Localization through map stitching in wireless sensor networks. IEEE Trans. Parallel Distrib. Sys 2008, 19, 93–105. [Google Scholar]
- Yedavalli, K.; Krishnamachari, B. Sequence-based localization in wireless sensor networks. IEEE Trans. Mob. Comput 2008, 7, 81–94. [Google Scholar]
- Rappaport, T.S. Wireless communications: principles and practice, 2nd Ed ed; Prentice Hall: New Jersey, USA, 2002; pp. 139–140. [Google Scholar]
- Ji, X.; Zha, H. Sensor positioning in wireless ad-hoc sensor networks using multidimensional scaling. Proceedings of the the Twenty-third Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM'04), Hong Kong, China, March 7–11, 2004; 4, pp. 2652–2661.
- Wang, X.; Wang, S.; Bi, D.; Ma, J. Distributed peer-to-peer target tracking in wireless sensor networks. Sensors 2007, 7, 1001–1027. [Google Scholar]
- Borg, I.; Groenen, P.J.F. Modern multidimensional scaling: theory and application, 2nd Ed ed; Springer: New York, NY, USA, 2005; pp. 169–226. [Google Scholar]




© 2009 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Pei, Z.; Deng, Z.; Xu, S.; Xu, X. Anchor-Free Localization Method for Mobile Targets in Coal Mine Wireless Sensor Networks. Sensors 2009, 9, 2836-2850. https://doi.org/10.3390/s90402836
Pei Z, Deng Z, Xu S, Xu X. Anchor-Free Localization Method for Mobile Targets in Coal Mine Wireless Sensor Networks. Sensors. 2009; 9(4):2836-2850. https://doi.org/10.3390/s90402836
Chicago/Turabian StylePei, Zhongmin, Zhidong Deng, Shuo Xu, and Xiao Xu. 2009. "Anchor-Free Localization Method for Mobile Targets in Coal Mine Wireless Sensor Networks" Sensors 9, no. 4: 2836-2850. https://doi.org/10.3390/s90402836
APA StylePei, Z., Deng, Z., Xu, S., & Xu, X. (2009). Anchor-Free Localization Method for Mobile Targets in Coal Mine Wireless Sensor Networks. Sensors, 9(4), 2836-2850. https://doi.org/10.3390/s90402836