A Distributed Sensor Network for the Control of a Bioclimatic House in Spain


Abstract
:
1. Introduction
1.1. Motivation
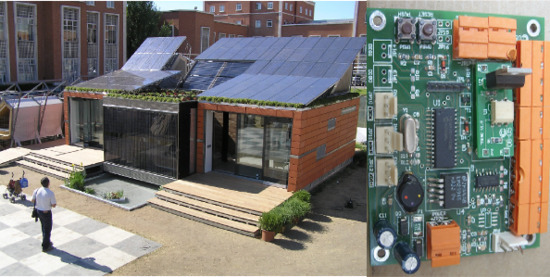
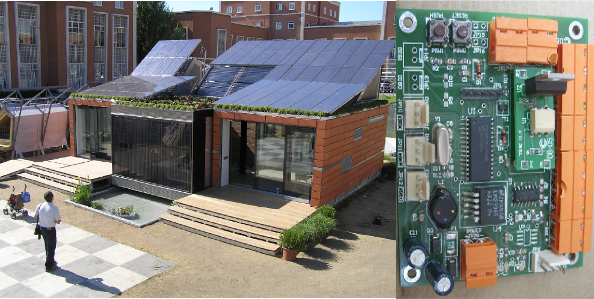
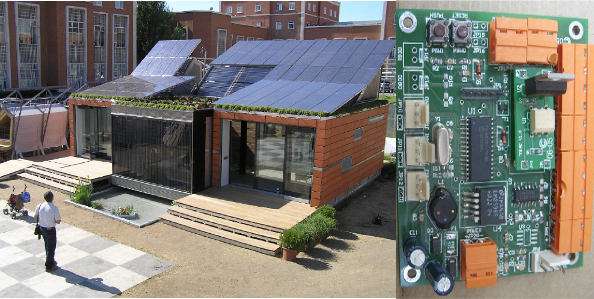
1.2. The Bioclimatic House
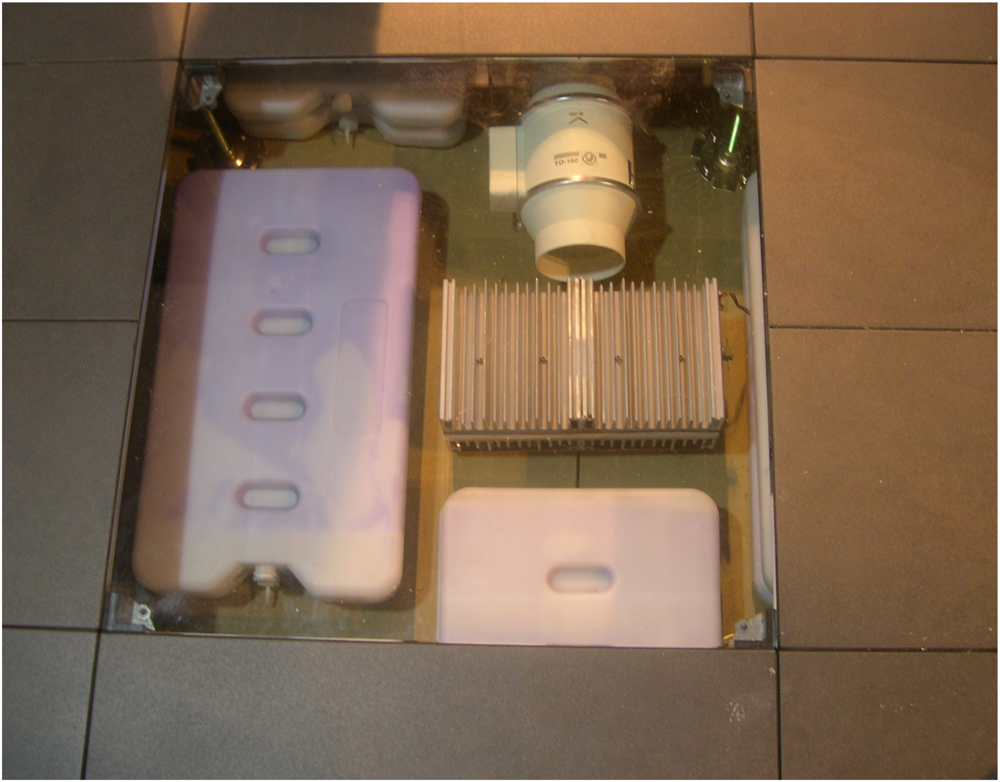
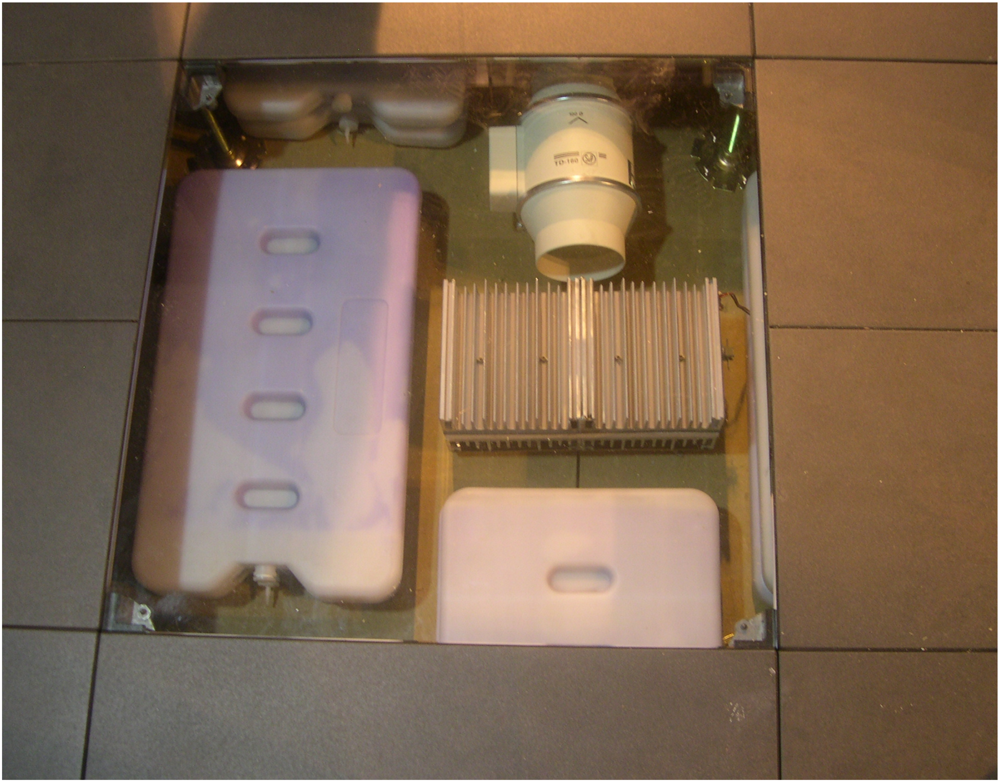
- 12 fans: The fans are located in the false floor together with the PSGs. They allow the air movement which stores or obtains energy from the PSGs.
- 18 servomotors: These are used for the grid and floodgate control. They modify the ventilation apertures in the house, redirecting it to the outside or the inside part of the house depending on the user needs.
- 6 peltiers: The peltiers are used for the humidity control. When the humidity is higher than expected, the peltiers are activated and create a voltage potential which allows the air, when passing through them, to be dehumidificated.
- 150 PSG capsules: These capsules include the already mentioned PSG which stores energy in terms of latent temperature.
2. The Control Bus
- The house, in which the system is going to be installed, is not a typical house where commercial devices can be integrated. On the contrary, it is a laboratory where, from the very beginning, non-conventional devices are present: fans situated in the false floor, dehumidification systems, PSGs and laboratory instrumentation. This is because the house is nowadays used as a research environment where different technologies in the fields of energy, construction and domotics are studied. We hope in the short term we are able to transpose all these advances into commercial houses.
- The house itself is a very dynamic environment where different novel technologies coexists. The control of non-standard technologies implies the need for a fast reaction when they are tested. By using commercial technologies we are restricted to devices which exist in the market and some of them are not able to control specific elements in the house.
- Finally, we wanted to create a new device based on an already tested technology which makes the system robust and scalable, and which offers new control capabilities in the field of sustainability, bioclimatic and self-sufficiency.
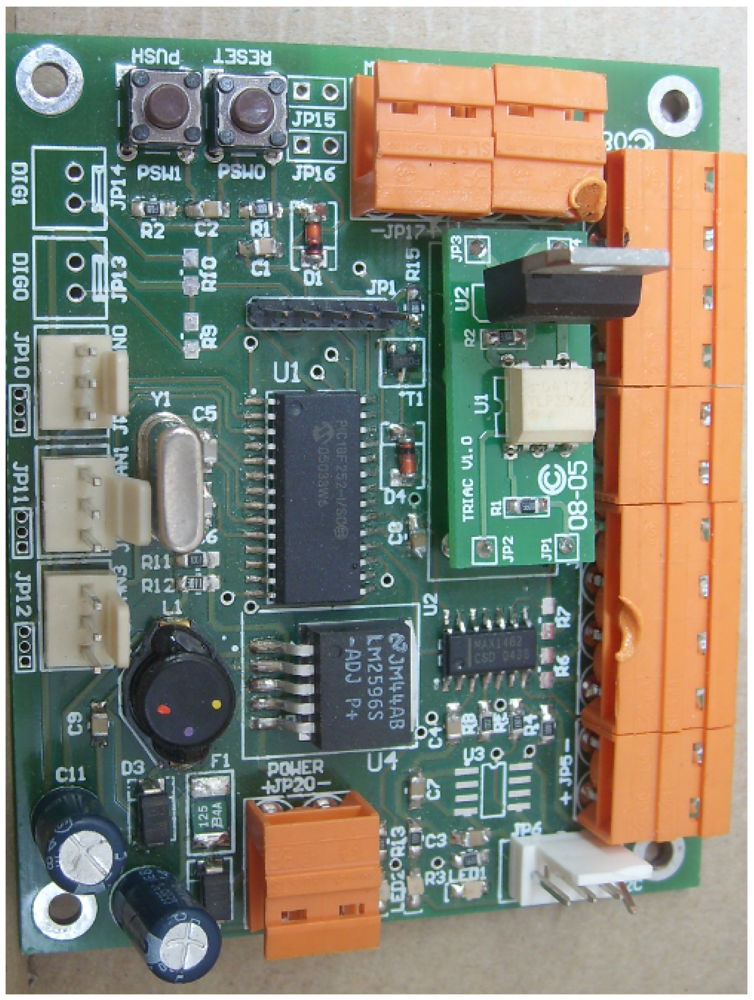
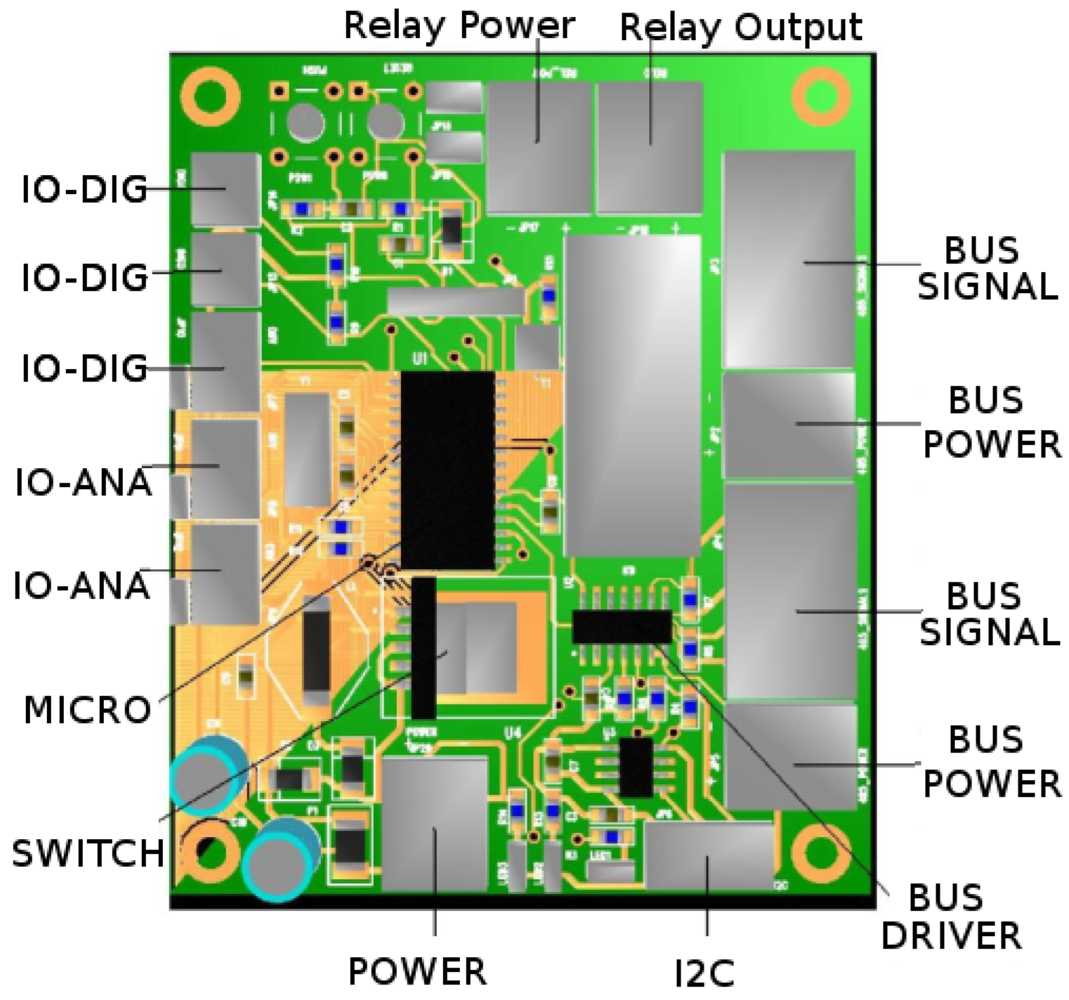
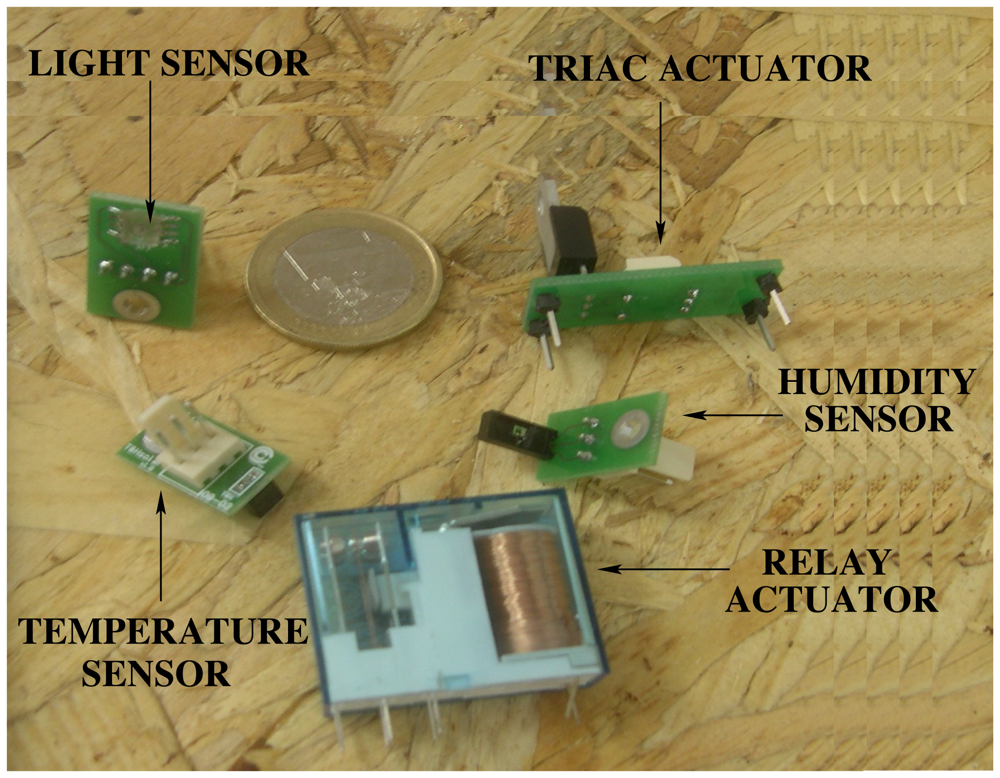
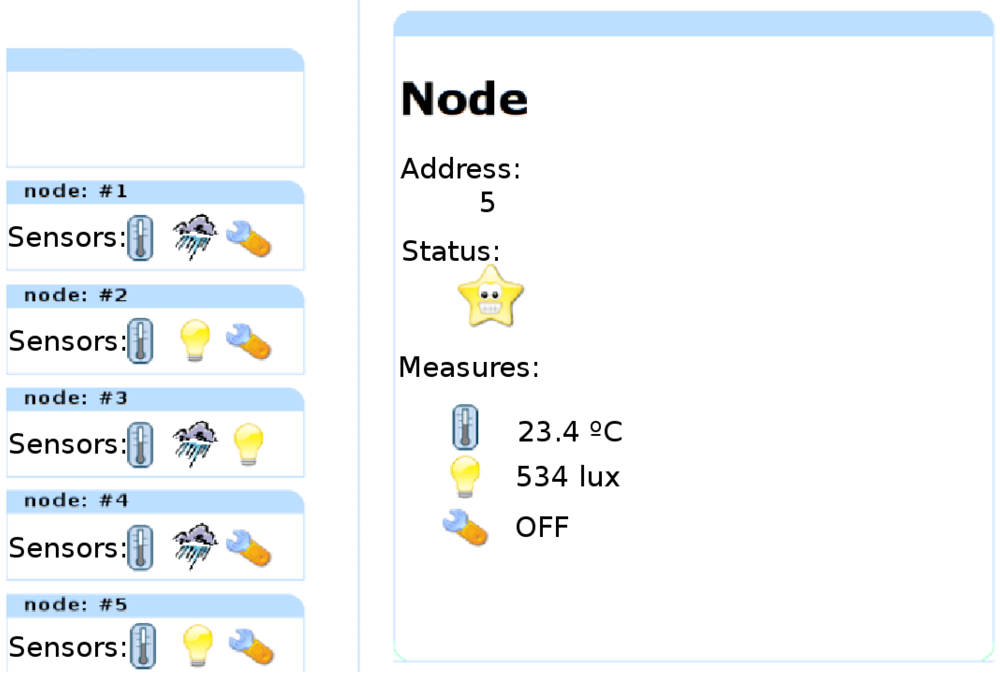
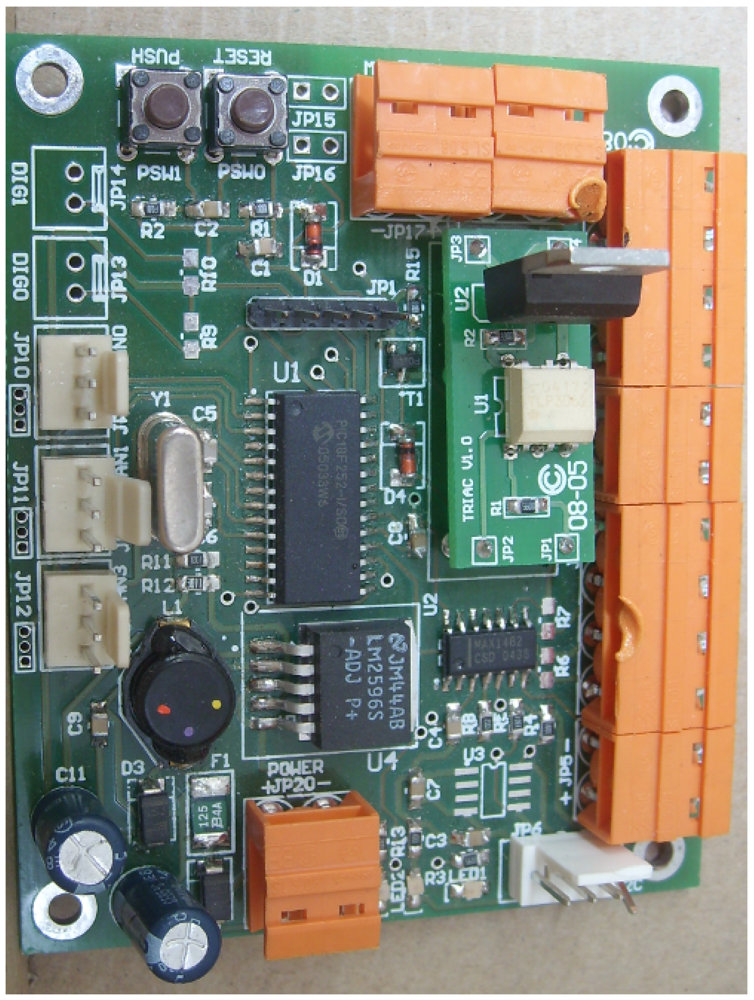
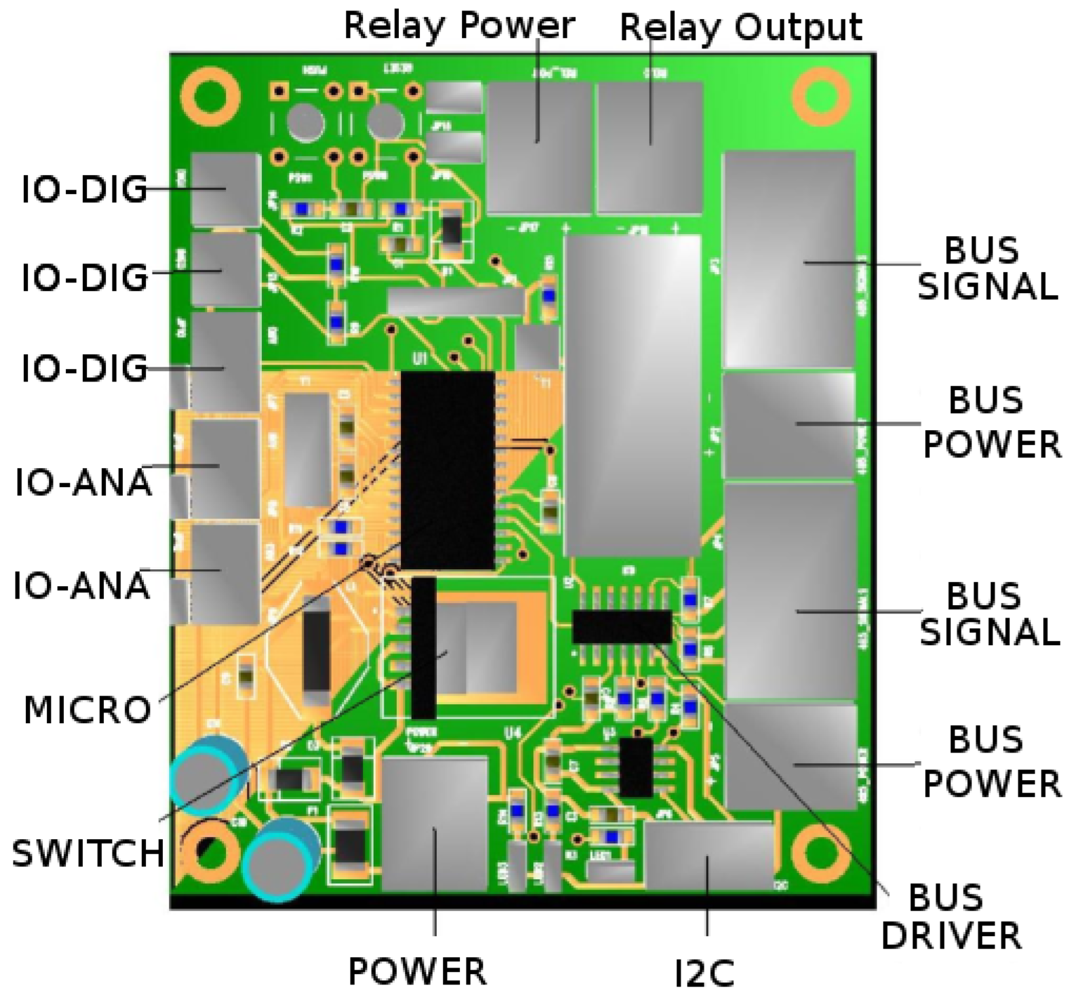
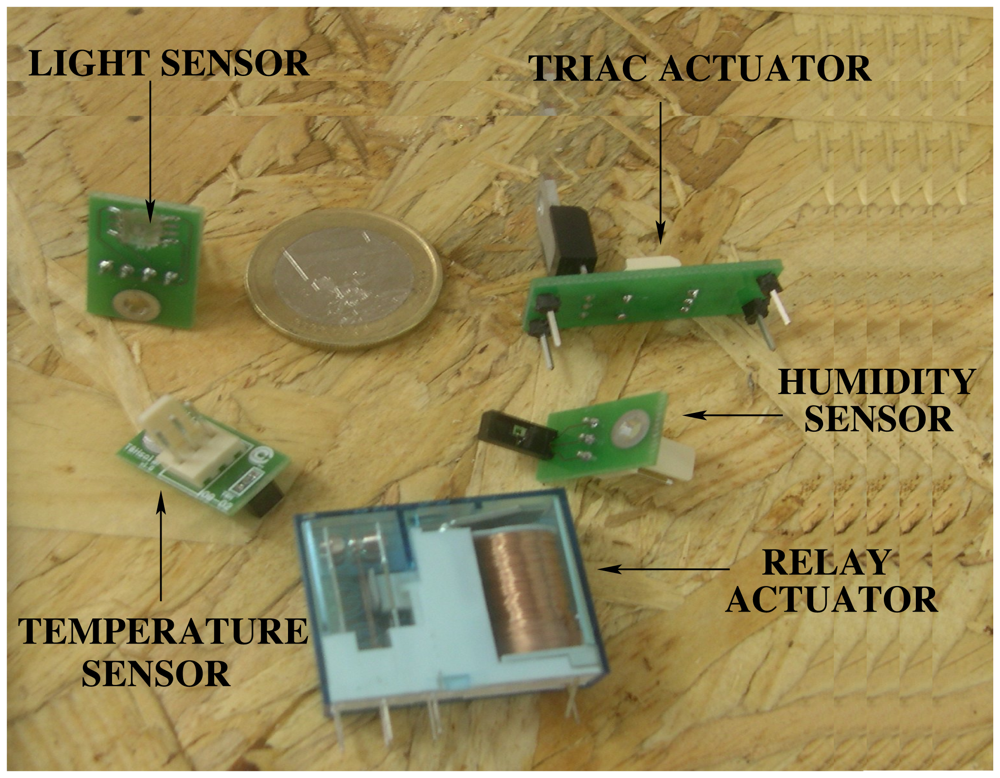
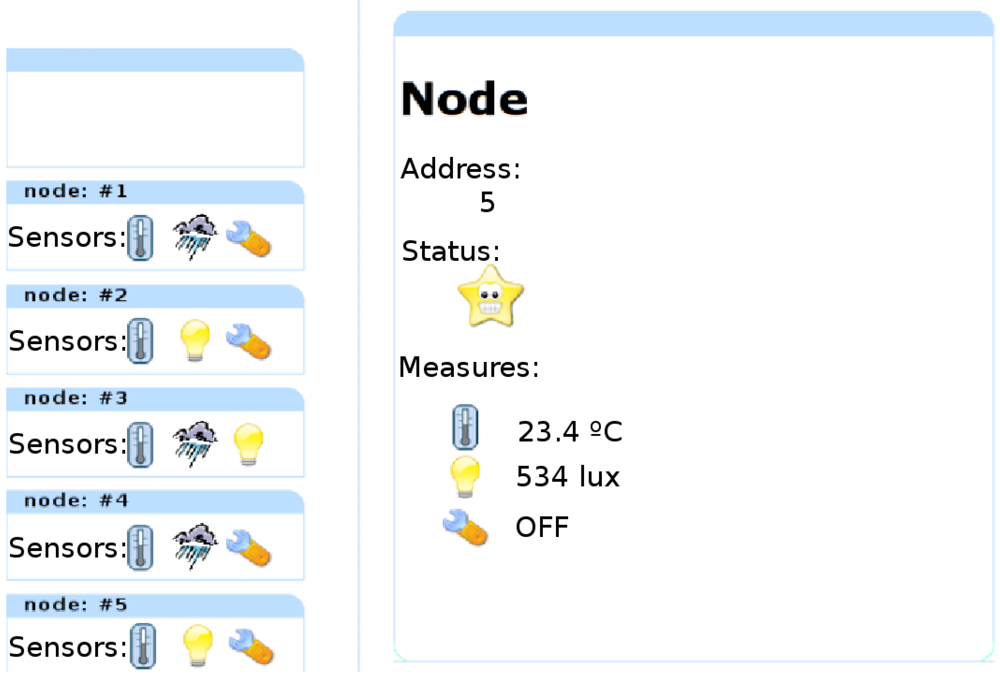
2.1. The Node
2.2. Communication Protocol
- STX (0×02): It is the Start of Frame. This character establishes the starting point of a data frame.
- DIR: It is made up of 2 bytes which indicate the hexadecimal value of the node address in ASCII code. It is also used as the reception node address when the frame is sent by the computer. For example, if a frame is sent by the node “1D”, the field will include the 0×31 and 0×42 bytes which correspond to the “1” and “D” ASCII characters.
- Frame Number: 2 bytes which indicate hexadecimal value of the frame number. All the frames are numbered from 0×00 to 0×FF. When the frame number reaches its limit it is reset to the 0×00 value.
- Data: The amount of data sent in each frame is variable. It includes both special commands and data.
- CRC-16: 2 bytes used for the error detection transmission. The CRC generated corresponds to the whole frame not including the EOT and STX characters.
- EOT (0×04): It is the End of Frame character. This character establishes the end point of the data frame and indicates that the transmission has finished.
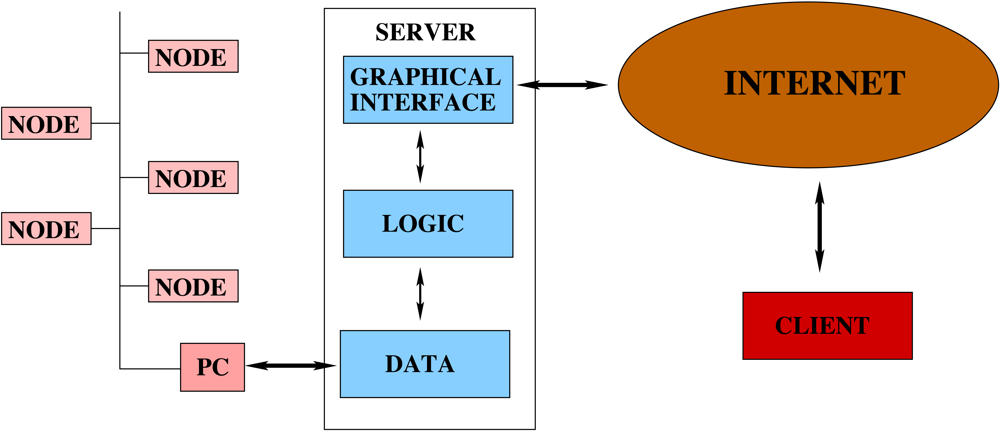
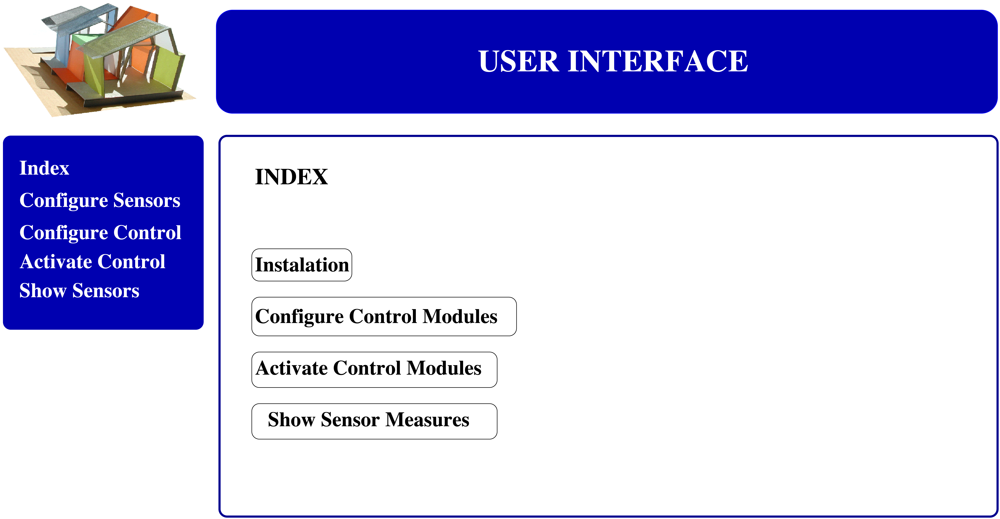
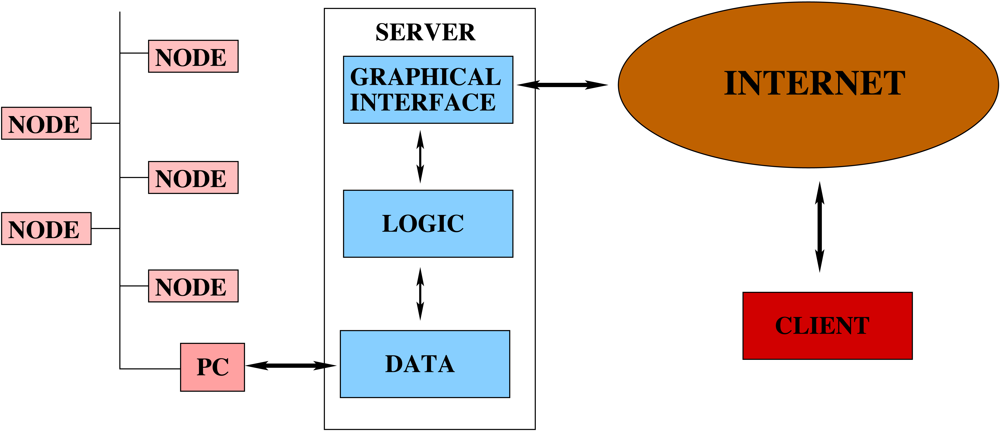
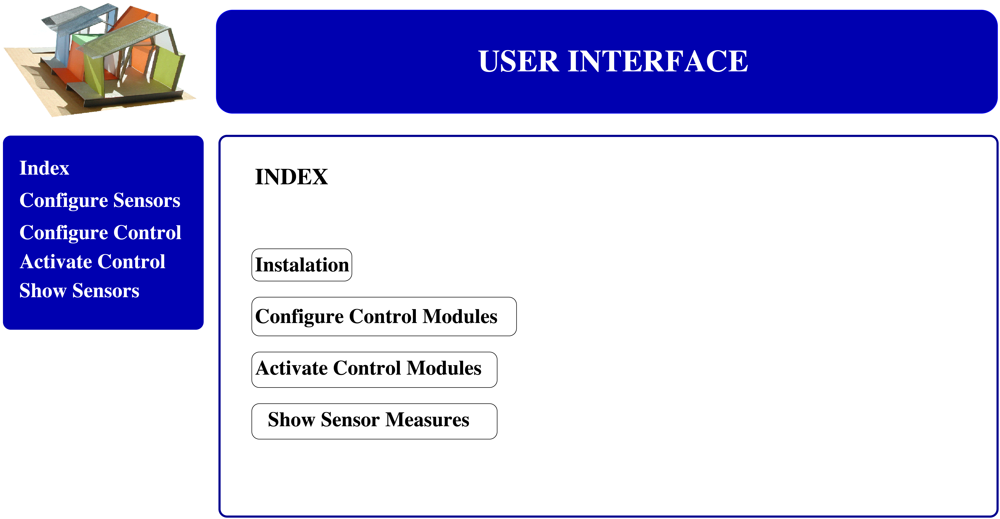
3. The User Interface
- Network configuration: This module allows the user to add or remove new nodes in the network. It notifies the user about all the nodes detected into the system. The supplied list will include the previous installed nodes and new nodes physically introduced in the system.
- Configuration of the controllers: This is the core of the user interface and the most complex module. It allows the user to create or delete new controllers. The controllers are created based on logical terms. A simple and standard controller could be defined as follows: “If the average temperature measured by node 1 and node 3 is higher than 30°C and the temperature measured by node 5 is increasing then activate the air conditioner 2” which should be introduced into the system as “if ((average(T1(t), T3(t) > 30) & (T5(t) > T5(t − 1)) then R2(ON)”.
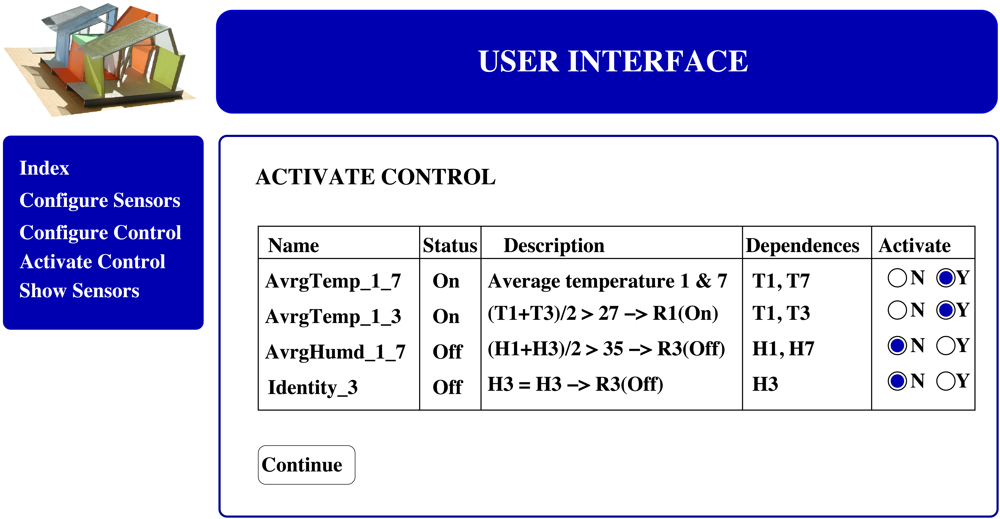
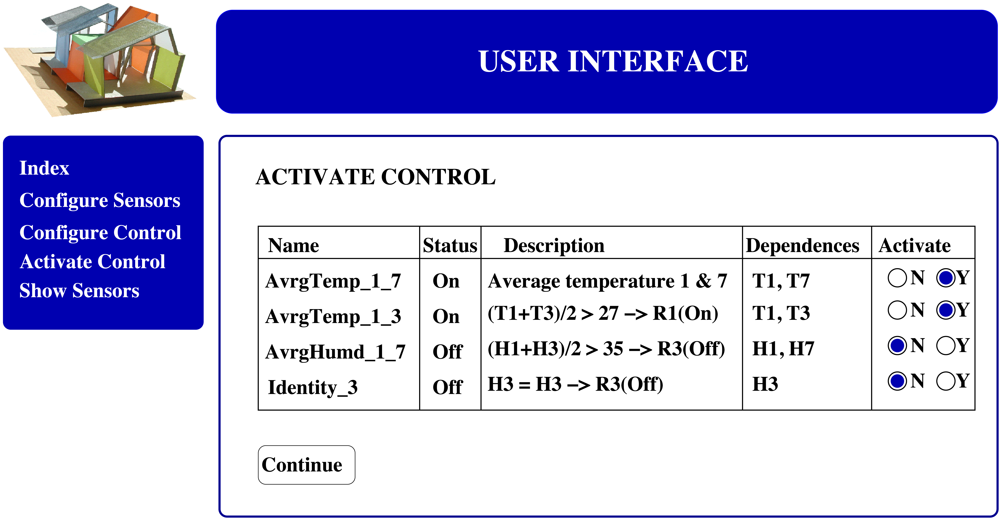
- Activation of the controllers: Different controllers created by different users can be available in the data base. However, not all the users will be interested in having all the controllers running at the same time. Hence, the interface allows the user to activate or deactivate the controllers according to his preferences (see Figure 8b).
4. Experimental Results
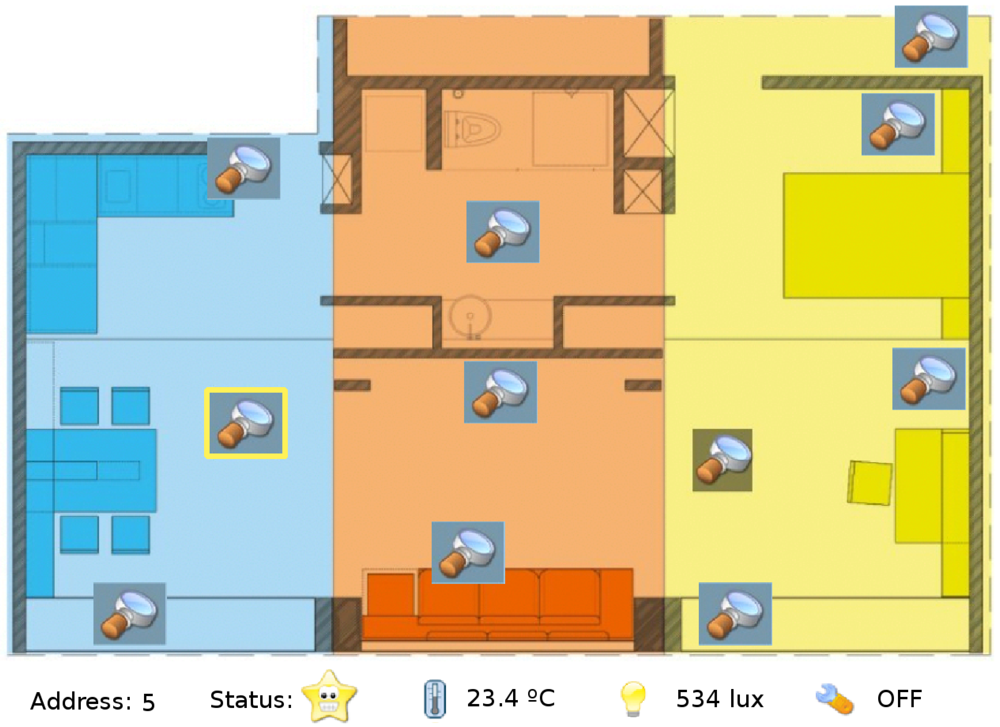
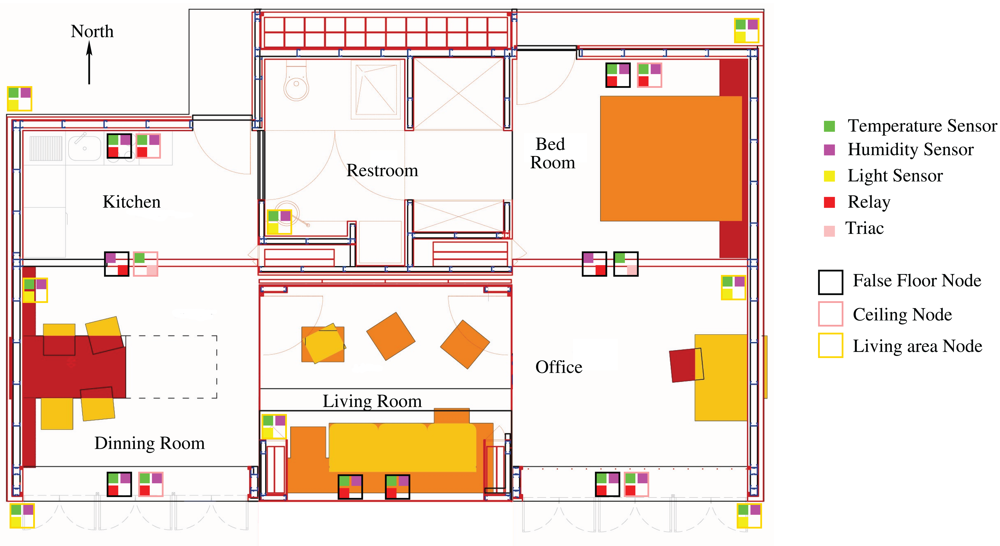
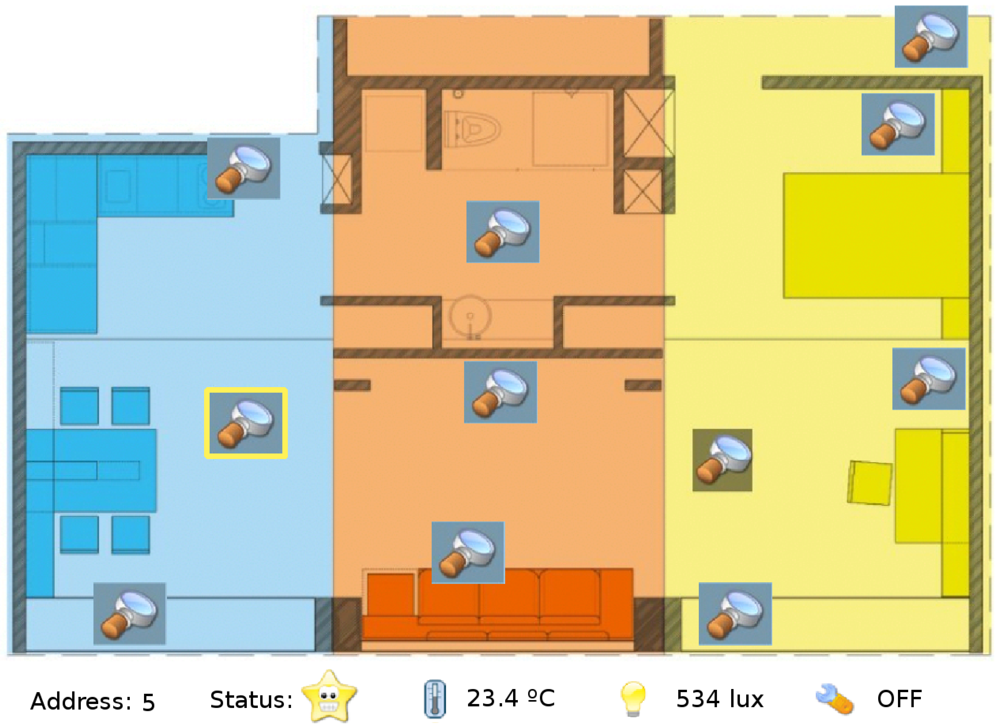
4.1. The Network in the House
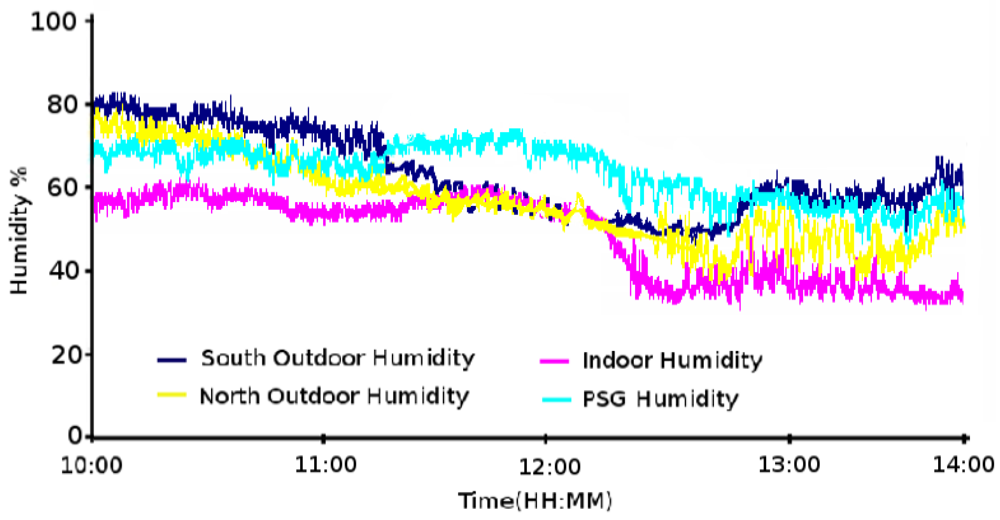
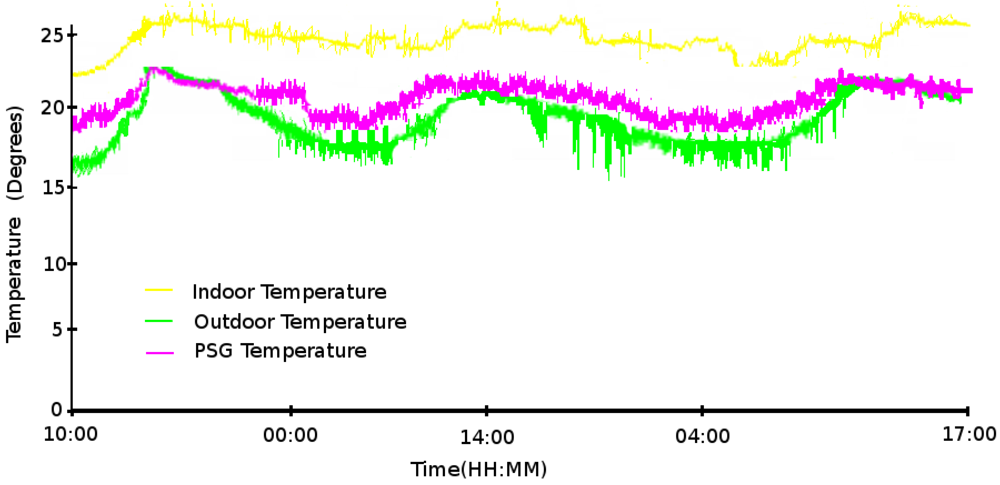
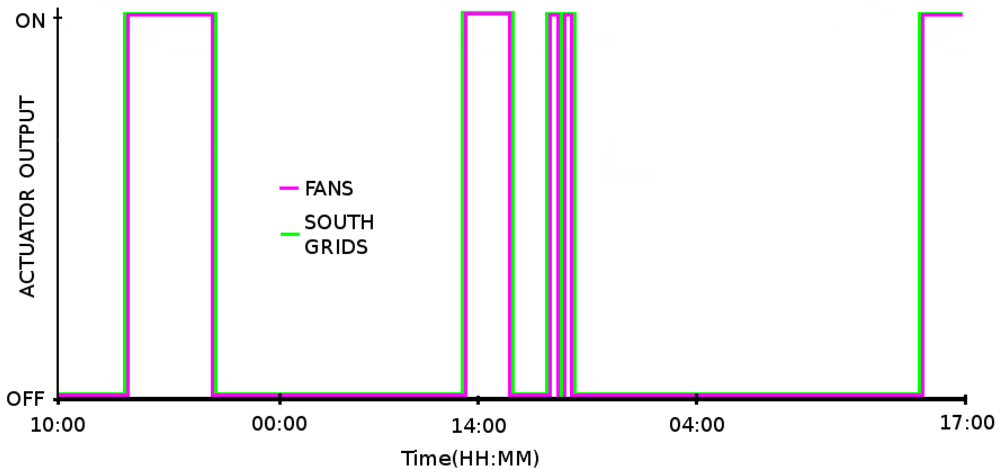
4.2. A Failed Experiment
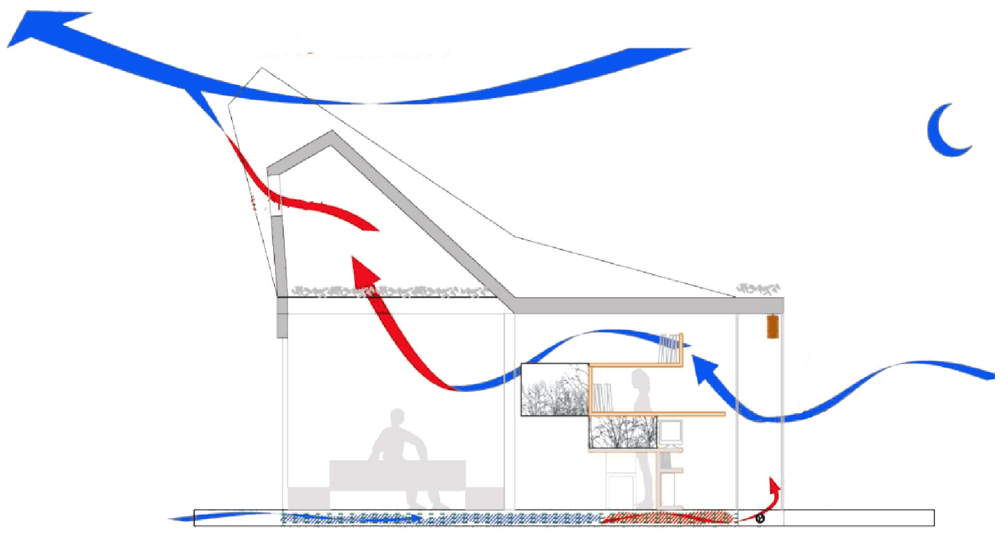
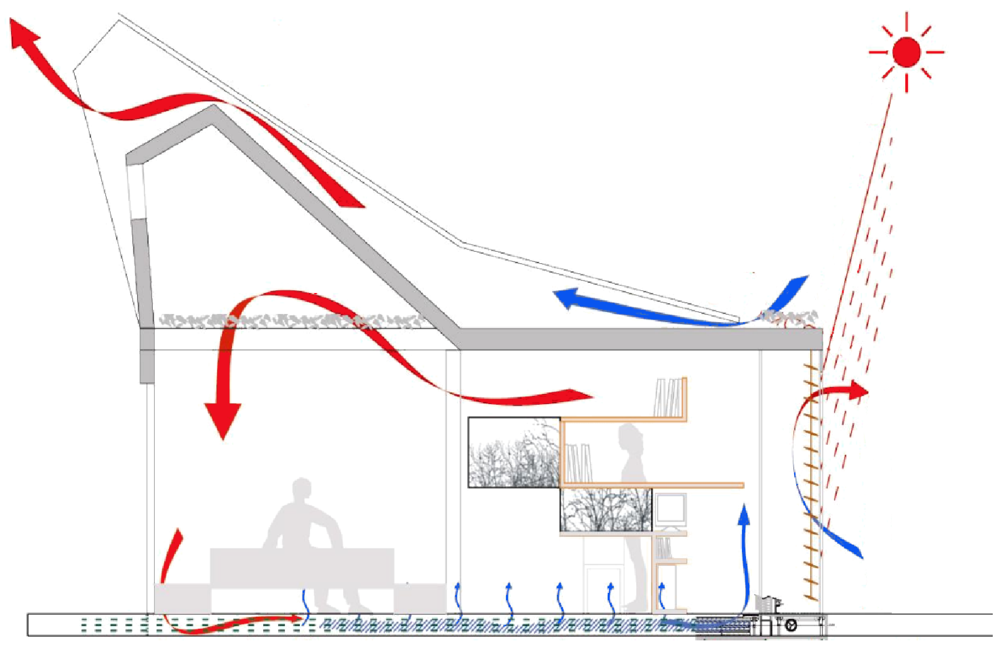
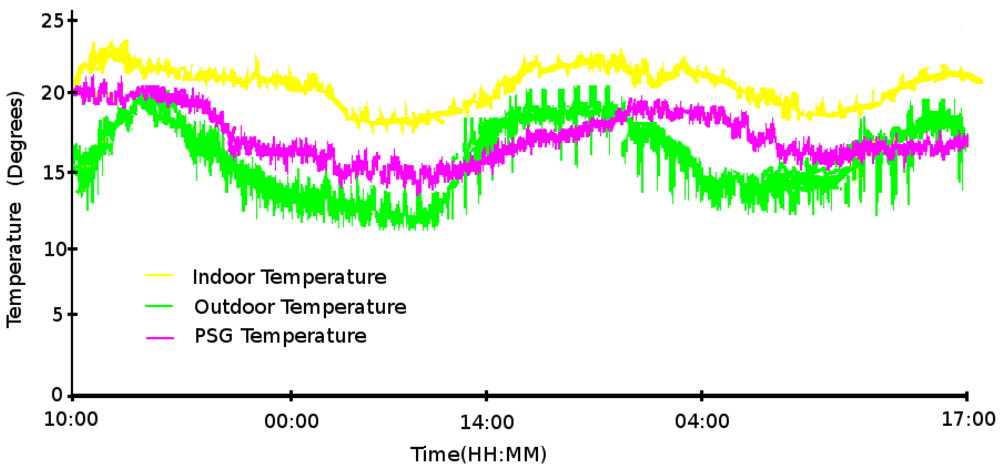
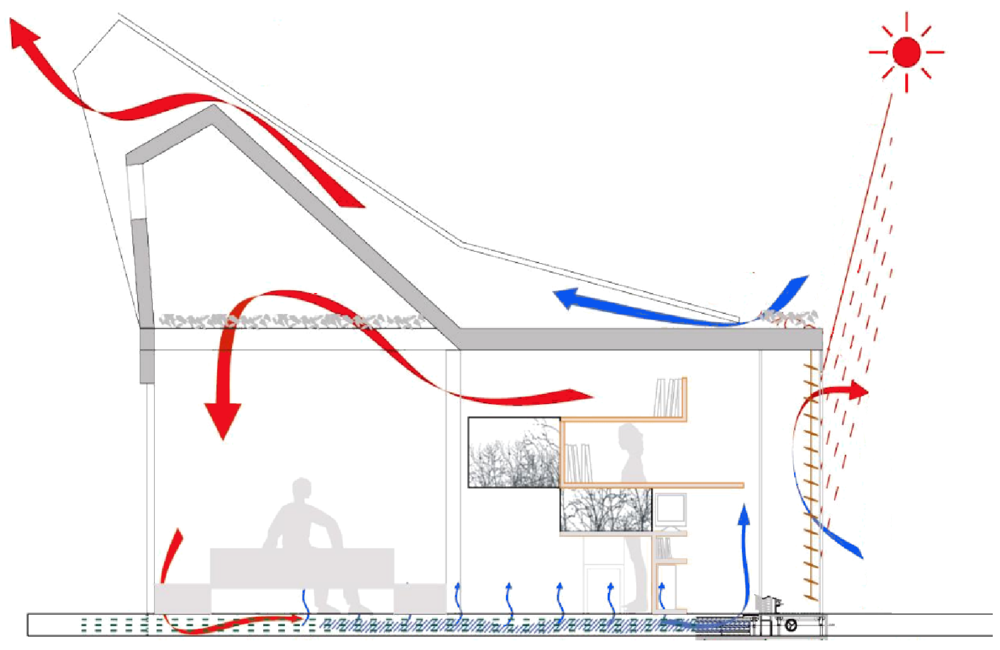
- The PSG temperature is more stable than the outdoor temperature. This is because of their thermal inertia.
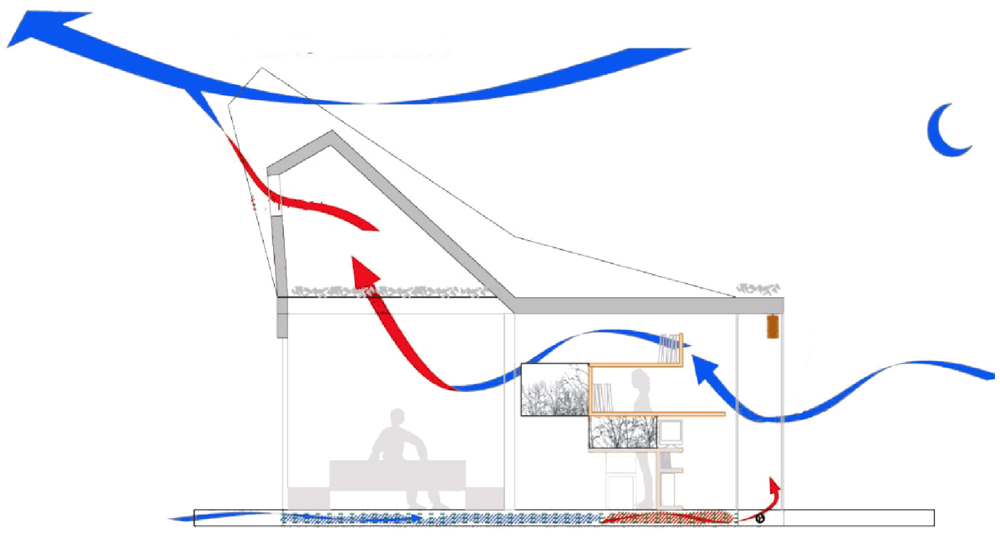
- The cold (in our example) comes from outdoors and modifies the indoor conditions. We can observe a phase shift in the indoor temperature with respect to that of the outdoors. Moreover, the indoor temperature offers a more reduced amplitude because of the PSGs.
- For a successful climatization, the use of passive thermal conditioning is not enough when the outdoor conditions are not appropriate. An active element, such as a heat pump or air conditioning, is needed to help the energy storage on the PSGs. This is because, after a long period without the possibility of acquiring external energy, the system cannot reach the required values.
4.3. A Successful Experiment
5. Conclusions
Acknowledgments
References and Notes
- Olgyay, V.; Olgyay, A. Application of Climatic Data to House Design; House and Home Finance Agency: Washington, DC, USA, 1954. [Google Scholar]
- Rapoport, A. Buildings and Society: Essays on the Social Development of the Built Environment; Routledge and Kegan Paul Ltd.: London, UK.
- Olgyay, V. Design With Climate: Bioclimatic Approach to Architectural Regionalism; Princeton University Press: Princeton, NJ, USA, 1963. [Google Scholar]
- Olgyay, V. Bioclimatic Approach to Architecture; Technical Report for National Research Council; Washington, DC, USA, 1953. [Google Scholar]
- Jones, D.L. Architecture and the Environment: Bioclimatic Building Design; Laurence King: London, UK, 1998. [Google Scholar]
- Henze, G.P.; Felsmann, C.; Knabe, G. Evaluation of Optimal Control for Active and Passive Building Thermal Storage. Int. J. Therm. Sci. 2004, 43, 173–183. [Google Scholar]
- Hui, S.C. Low Energy Building Design in High Density Urban Cities. Renewable Energy 2001, 24, 627–640. [Google Scholar]
- Thompson, G.F.; Steiner, R.S. (Eds.) Ecological Design and Planning; Wiley & Sons: London, UK, 1997.
- Zalba, B.; Marín, J.M.; Cabeza, L.F.; Mehling, H. Review on Thermal Energy Storage with Phase Change: Materials, Heat Transfer Analysis and Applications. App. Therm. Eng. 2002, 23, 251–283. [Google Scholar]
- Inoue, M.; Uemura, K.; Minagawa, Y.; Esaki, M.; Honda, Y. A Home Automation System. IEEE Trans. Consum. Electron. 1985, 31, 516–527. [Google Scholar]
- Stauffer, H.B. Smart Enabling System for Home Automation. IEEE Trans. Consum. Electron. 1991, 37, 29–35. [Google Scholar]
- Nugent, C.D.; Finlay, D.D.; Fiorini, P.; Tsumaki, Y.; Prassler, E. Editorial Home Automation as a Means of Independent Living. IEEE Trans. Automat. Sci. and Eng. 2008, 5, 1–9. [Google Scholar]
- Anderson, B.; McWilliam, A.; Lacohée, H.; Clucas, E.; Gershuny, J. Family Life in the Digital Home: Domestic Telecommunications at the End of the 20th Century. J. BT Technol. 2007, 25, 301–312. [Google Scholar]
- Weiser, M. Hot Topics-Ubiquitous Computing. Computer 1993, 26, 71–72. [Google Scholar]
- Aarts, E. Ambient Intelligence: A Multimedia Perspective. IEEE Multim. 2004, 11, 12–19. [Google Scholar]
- Weber, W.; Rabaey, J.R.; Aarts, E. (Eds.) Ambient Intelligence; Springer-Verlag: Berlin, Germany, 2005.
- Caamano-Martín, E.; Masa, D.; Gutiérrez, A.; Monasterio-Huelin, F.; Jiménez-Leube, J.; Castillo, M.; Porro, J. Optimizing PV Use Through Active Demand Side Management. Proceedings of the 24th European Photovoltaic Solar Energy Conference, Munich, Germany; 2009. in press. [Google Scholar]
- Caamano-Martín, E.; Egido, M.A.; Neila, J.; Bedoya, C; Santos, A.G.; Jiménez, F.J.; Magdalena, L. Spanish Participation in the “Solar Decathlon 2005” Competition: New Proposals for Zero-Energy Houses. Proceedings of the 20th European Photovoltaic Solar Energy Conference, Munich, Germany; 2005; pp. 2587–2590. [Google Scholar]
- ISO/IEC 8482. International Organization for Standarization: Geneva, Switzerland, 1993.
- Crijns, H. KNX System Architecture; Konnex Association: Brussels, Belgium, 2004. [Google Scholar]
- Dietmar, L.; Dietmar, D.; Schweinzer, H.J. (Eds.) Open Control Networks: LonWorks/EIA 709 Technology; Springer-Verlag: Berlin, Germany, 2001.
- Gerhart, J. Home Automation & Wiring; McGraw Hill: Columbus, OH, USA, 1999. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Function | Command | Description |
|---|---|---|---|
| Temperature | Question | T? | It asks a specific node for the temperature. |
| Temperature | Answer | T = XXX | The node replies with the temperature measured. The two first digits correspond to the degrees while the third one is the tenths. |
| Humidity | Question | H? | It asks a specific node for the humidity. |
| Humidity | Answer | H = XXX | The node replies with the humidity measured. The two first digits correspond to the ten and unit while the third one is the tenths. |
| Light | Question | L? | It asks a specific node for the light intensity. |
| Light | Answer | L = XXX | The node replies with the light intensity measured. The value is offered from 0 to 999 luxes. |
| Actuator | Order | R = X | The node switchs its value to open (X=1) or closed (X=0) and replies with an ACK command. |
| Command | Value | Description |
|---|---|---|
| ACK | 0×06 | It is sent when a frame has been received and decoded correctly. |
| NACK | 0×15 | It is sent when a frame has not been decoded correctly. |
| RESET | 0×08 | It forces the node to be reset. After this command, the node sends an ACK and resets itself. For the next 2 seconds the node enters a programing mode which allows the central computer to reprogram the device. |
| ALIFE | 0×0C | This command is sent to a specific node to check if it is in working mode. If the board is correctly working, it answers with an ACK command. |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Gutiérrez, Á.; Jiménez-Leube, J.; Magdalena, L. A Distributed Sensor Network for the Control of a Bioclimatic House in Spain. Sensors 2009, 9, 8197-8214. https://doi.org/10.3390/s91008197
Gutiérrez Á, Jiménez-Leube J, Magdalena L. A Distributed Sensor Network for the Control of a Bioclimatic House in Spain. Sensors. 2009; 9(10):8197-8214. https://doi.org/10.3390/s91008197
Chicago/Turabian StyleGutiérrez, Álvaro, Javier Jiménez-Leube, and Luis Magdalena. 2009. "A Distributed Sensor Network for the Control of a Bioclimatic House in Spain" Sensors 9, no. 10: 8197-8214. https://doi.org/10.3390/s91008197
APA StyleGutiérrez, Á., Jiménez-Leube, J., & Magdalena, L. (2009). A Distributed Sensor Network for the Control of a Bioclimatic House in Spain. Sensors, 9(10), 8197-8214. https://doi.org/10.3390/s91008197