A Differential Pressure Instrument with Wireless Telemetry for In-Situ Measurement of Fluid Flow across Sediment-Water Boundaries

Abstract
:1. Introduction and Background
1.1. The measurement of fluid flow across the sediment-water boundary
1.2. Instrument design objectives
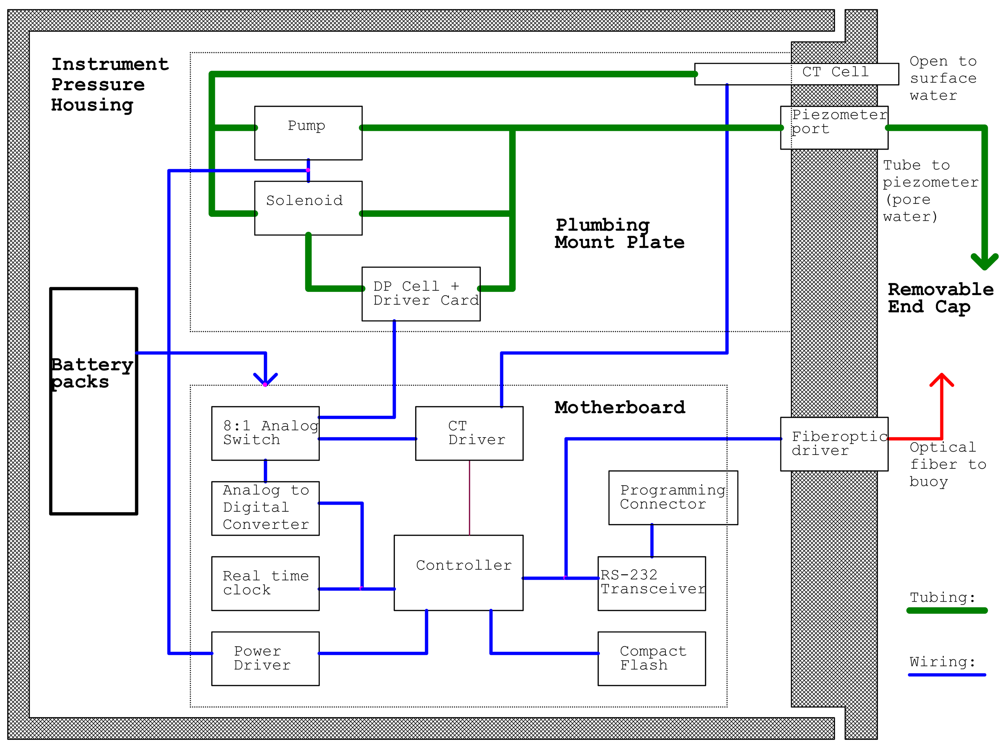
2. Conceptual Overview of the instrument and its operation
3. Detailed Design Criteria: Accuracy, precision, and the error budget
3.1. Pressure Error
3.2. Conductivity and temperature measurement error
3.3. Fluid system error
3.4. Signal processing error
4. Materials and Methods
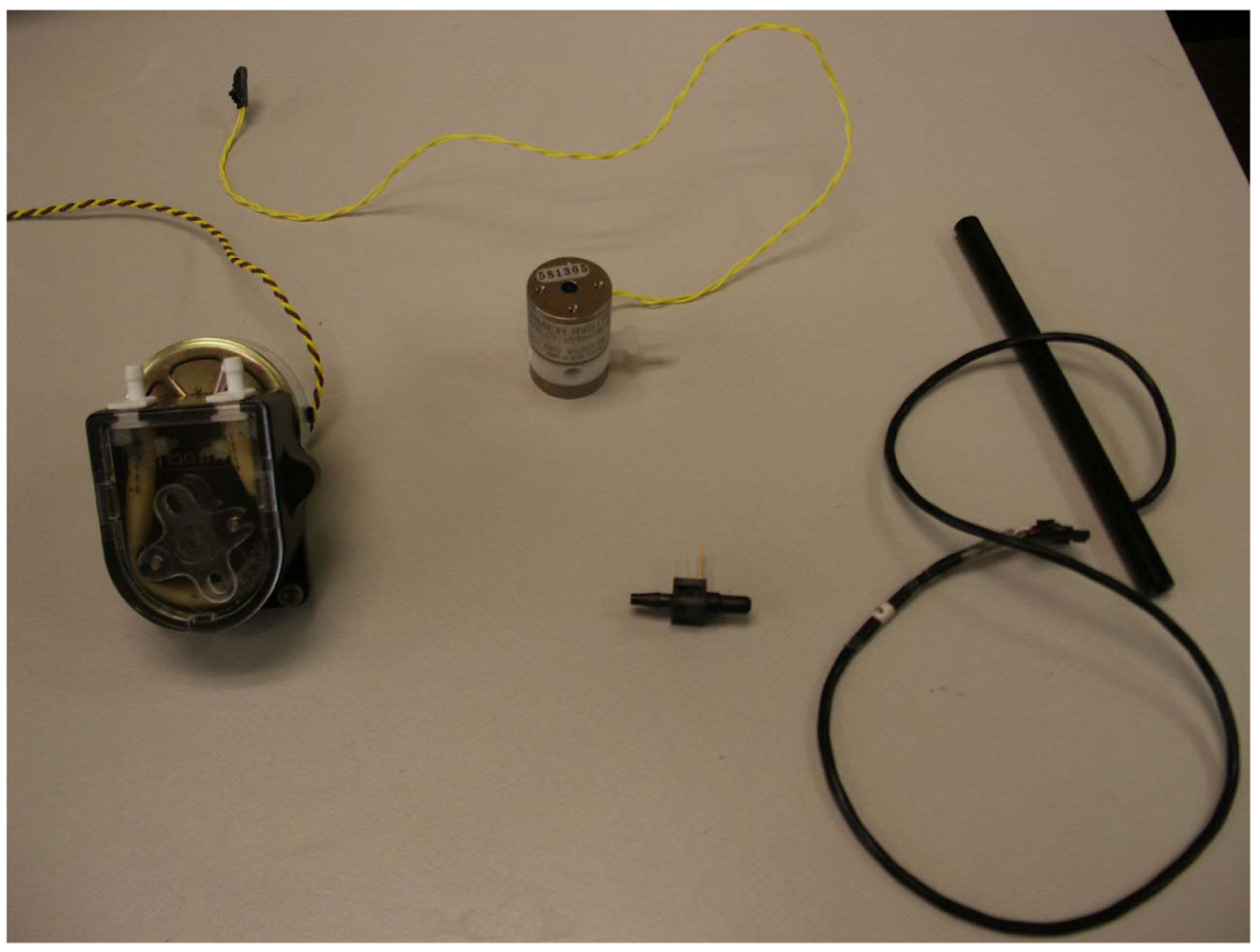
4.1. Key components
4.1.1. Pressure transducer
4.1.2. Temperature/conductivity cell
4.1.3. Fluid circuit components
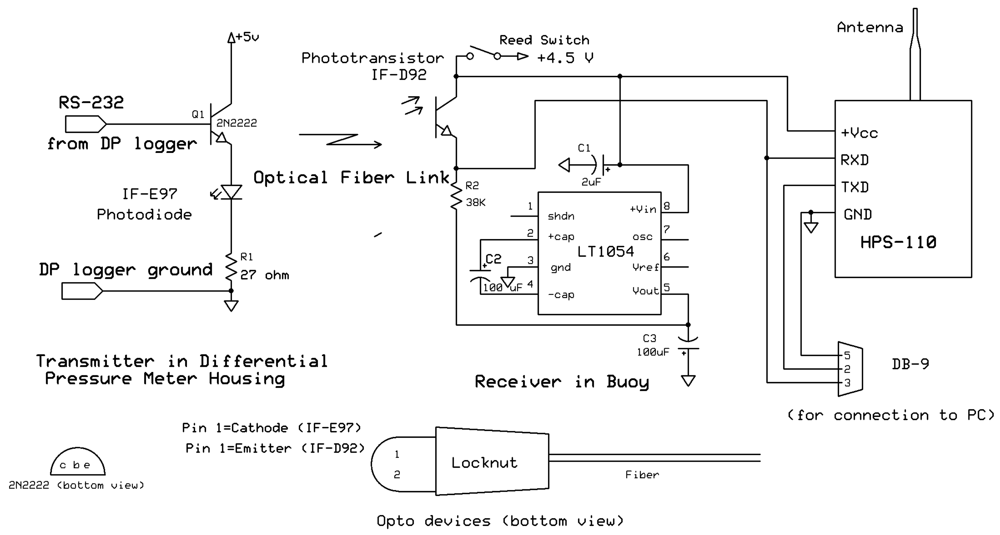
4.1.4. Data Link to shore
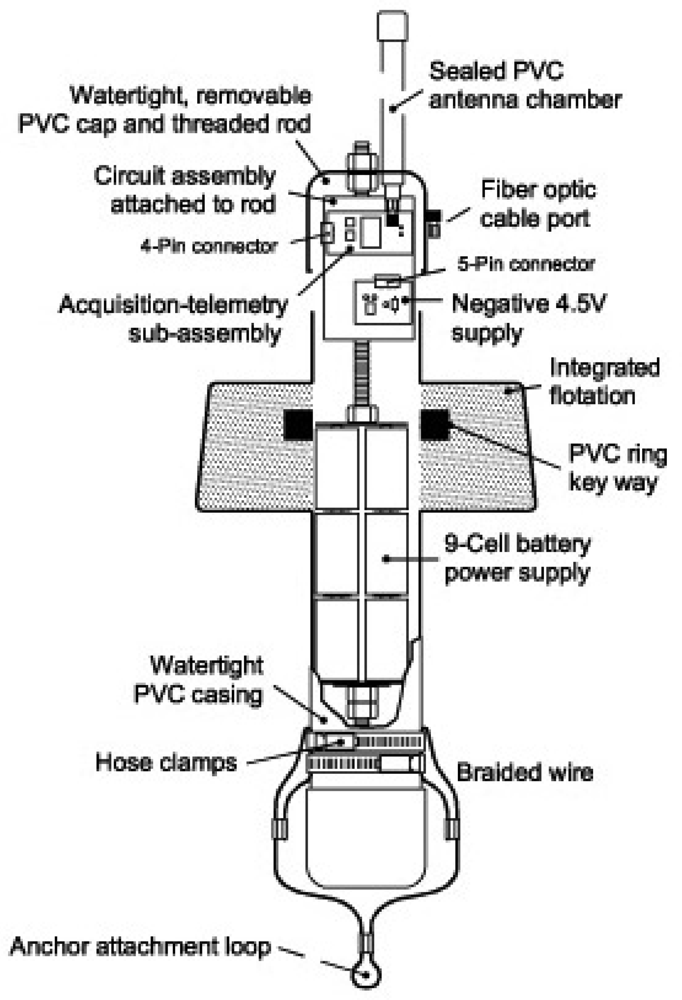
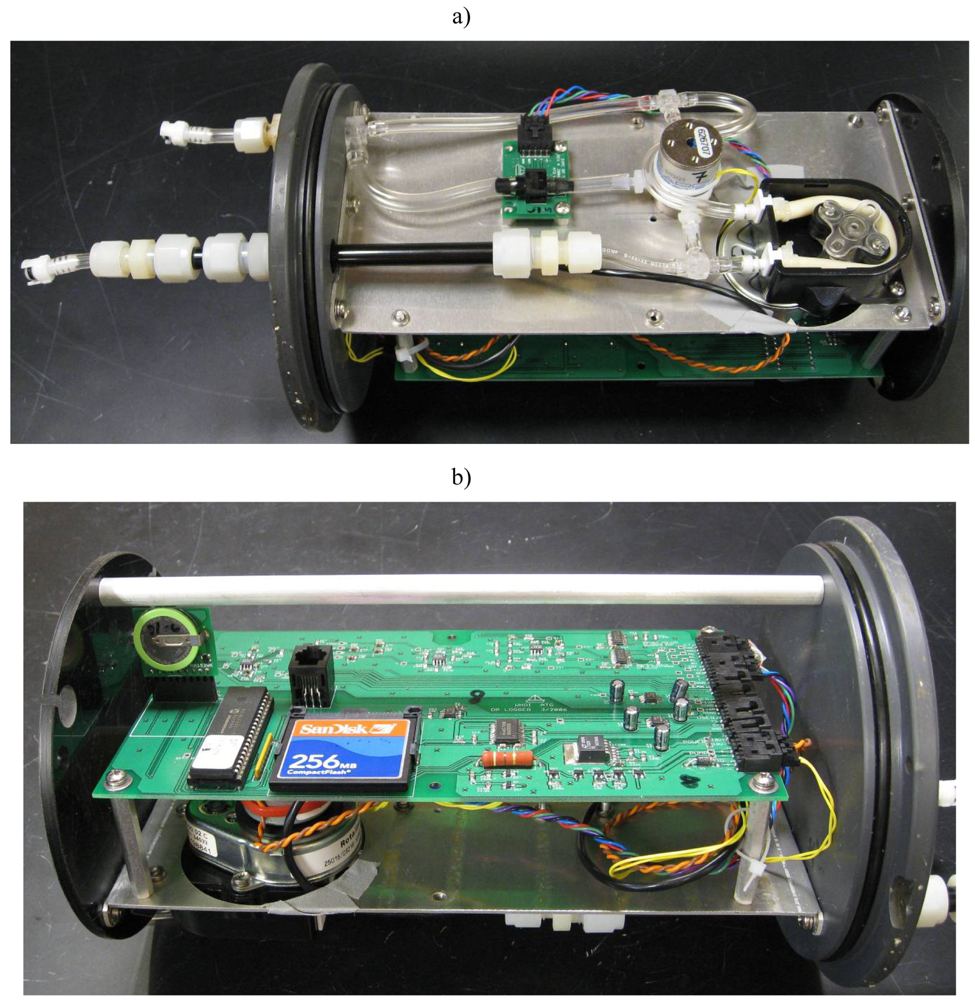
4.2. Mechanical Design
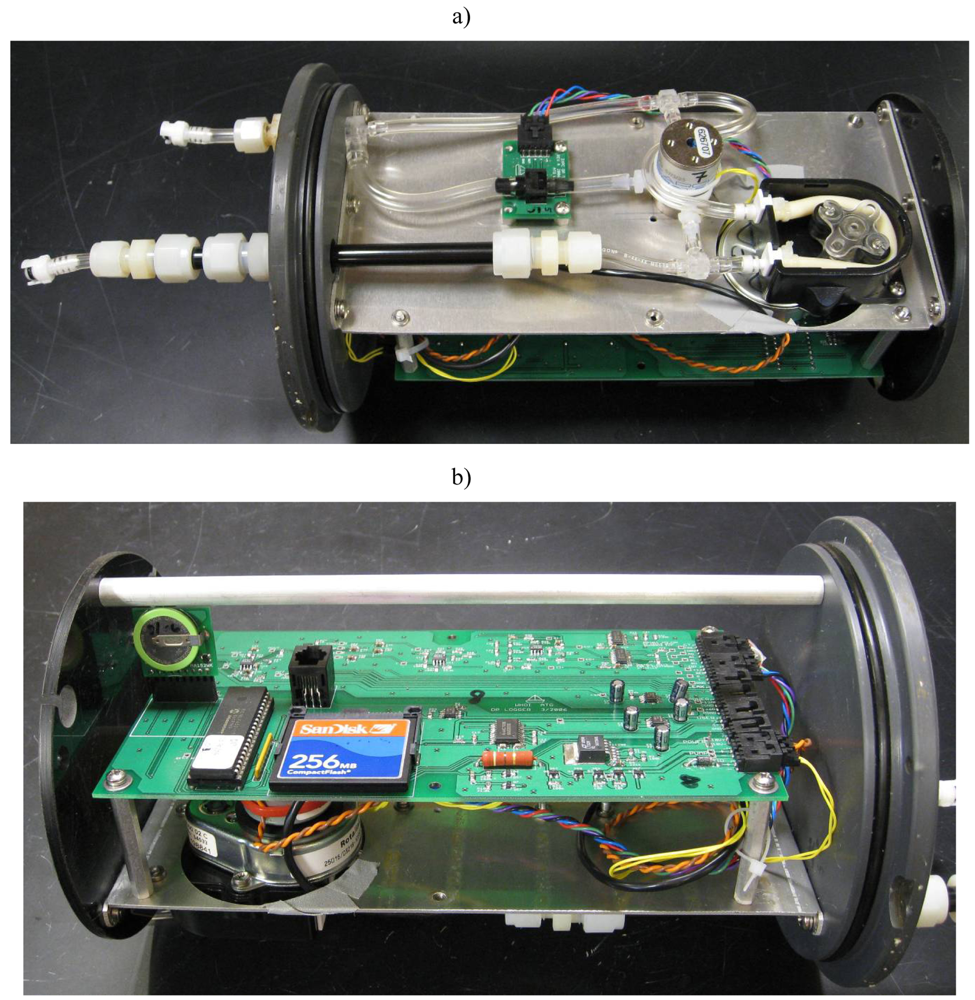
4.2.1. Differential Pressure Logger Housing
4.2.2. Fluid circuit
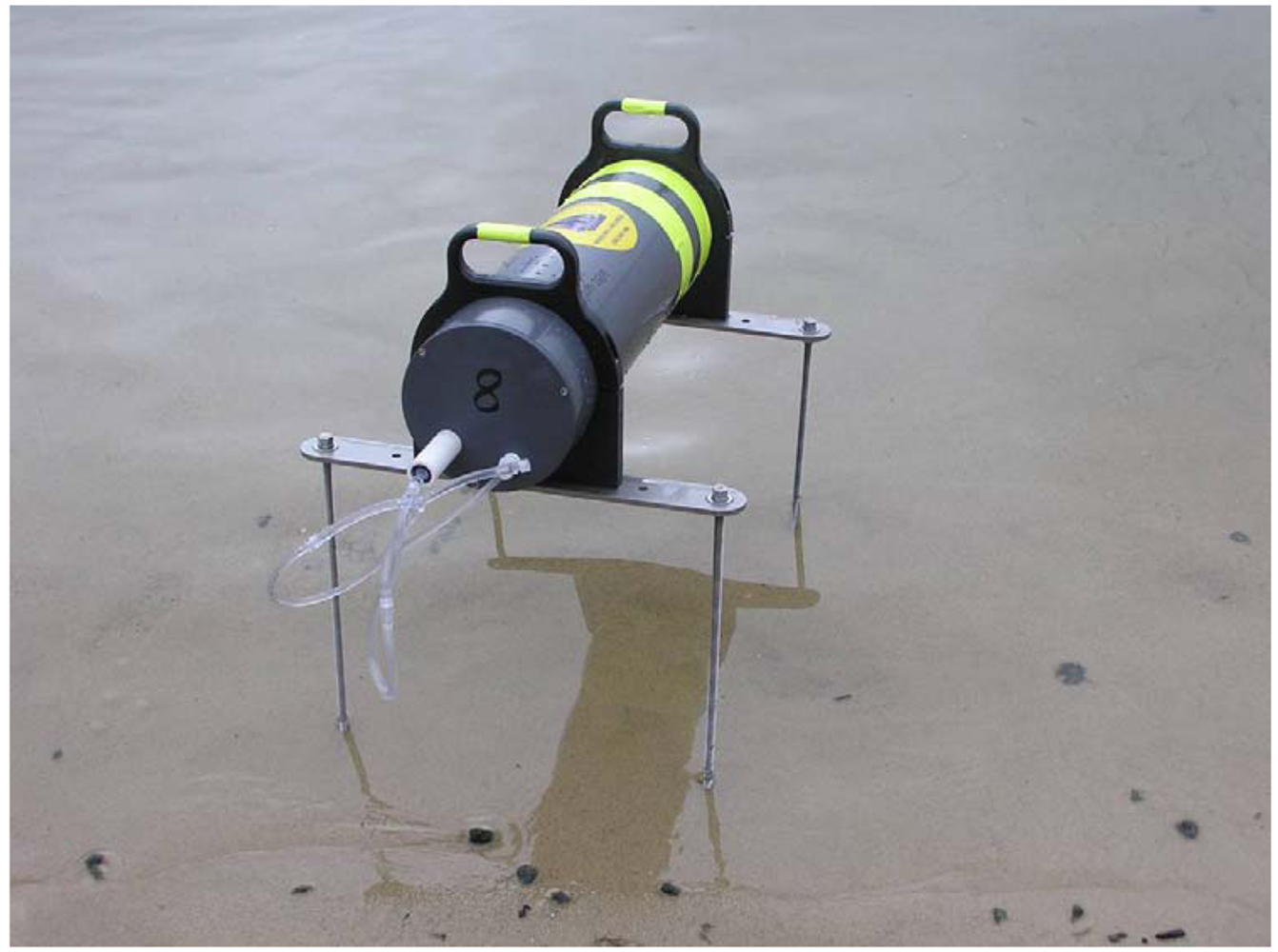
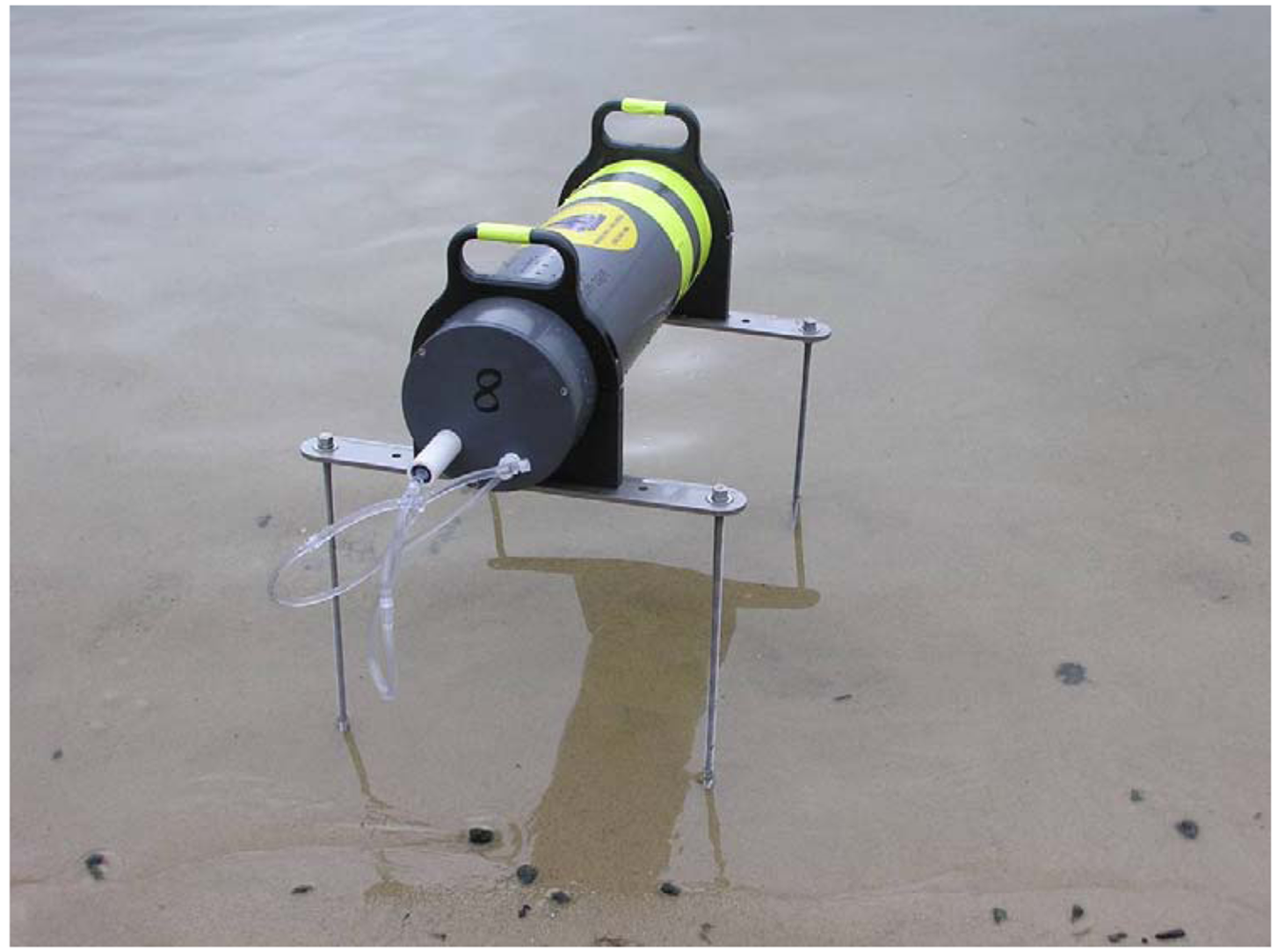
4.2.3. Buoy mechanical design
4.3. DP Logger Electrical Design
4.3.1. Analog Electronics
4.3.2. Digital Electronics
4.3.3 Power
4.4. Data Link and Buoy
4.5. Laboratory Calibration
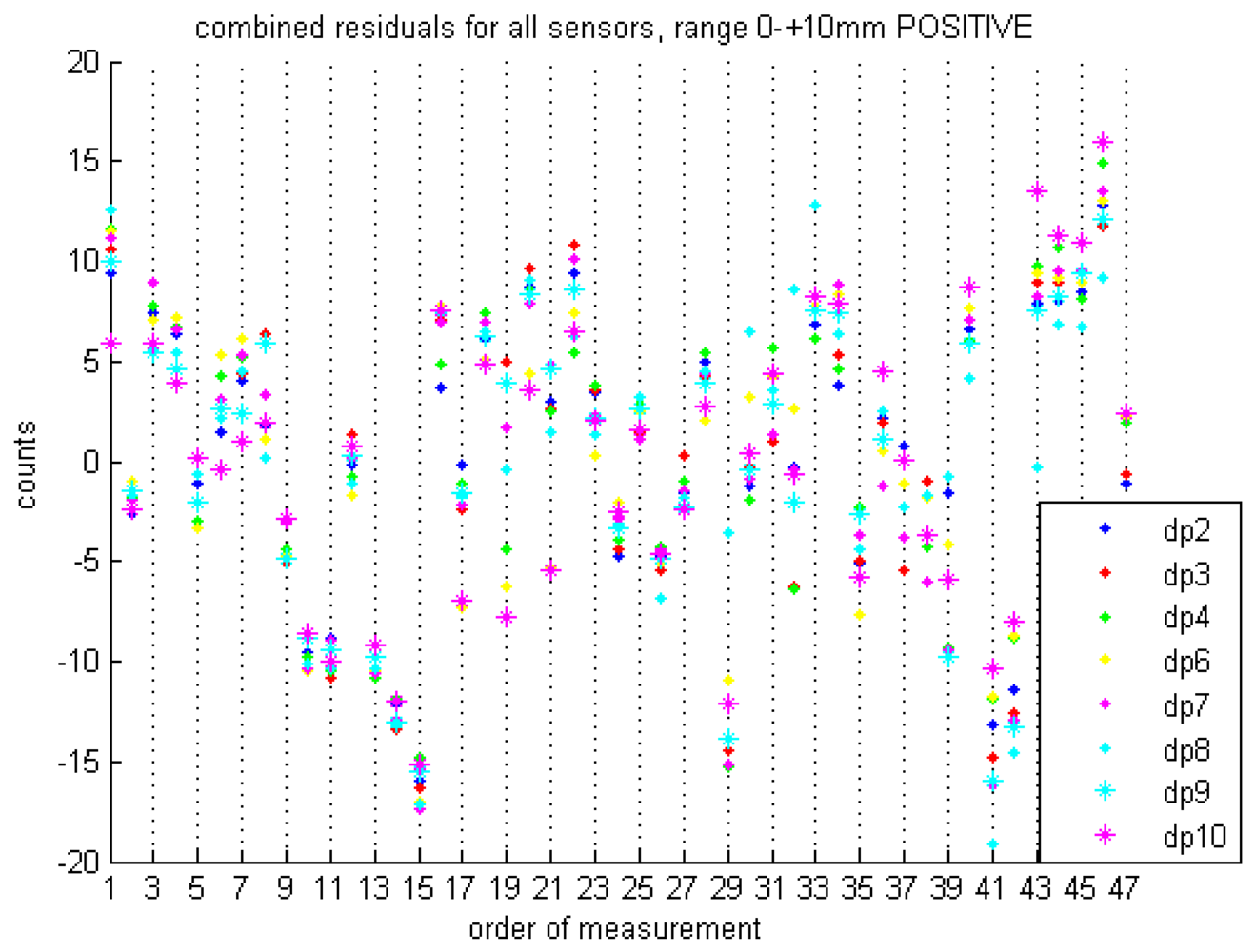
4.5.1 Differential Pressure Sensors
4.5.2. Conductivity-Temperature Cells
5. Results
5.1. Differential Pressure Cell Calibration
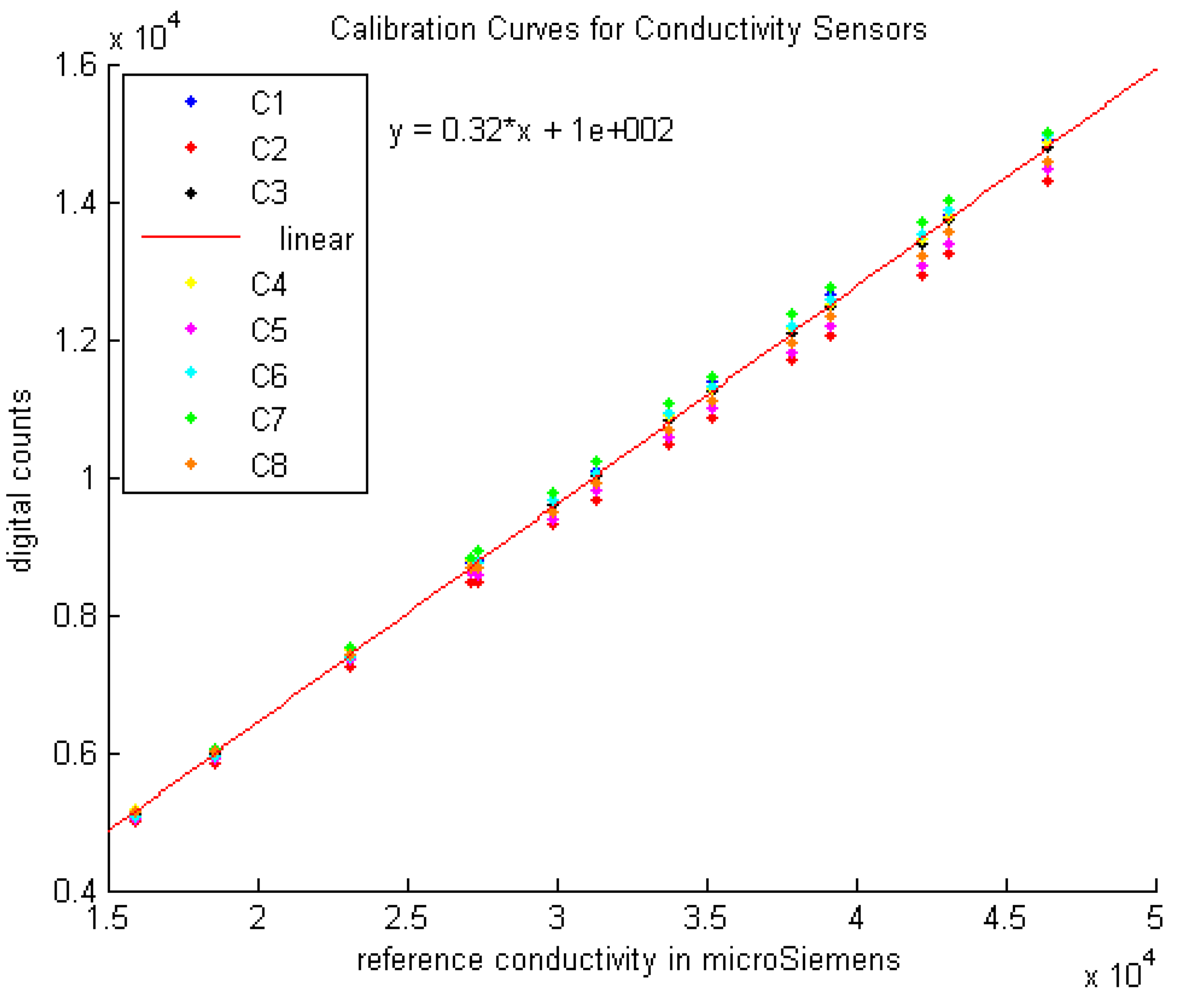
5.1.1. Conductivity and Temperature Cell Calibration
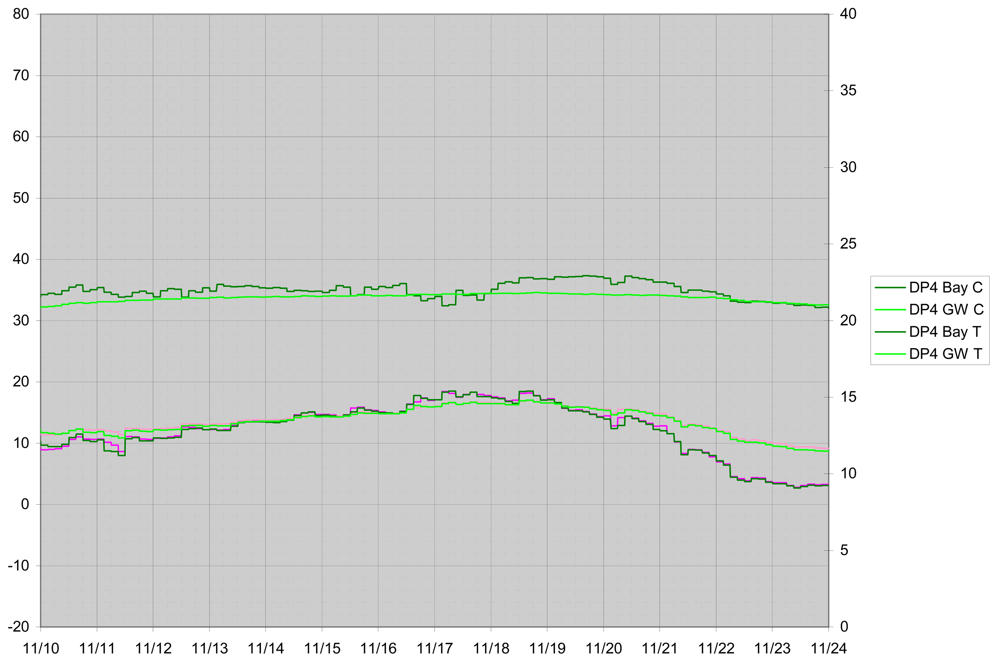
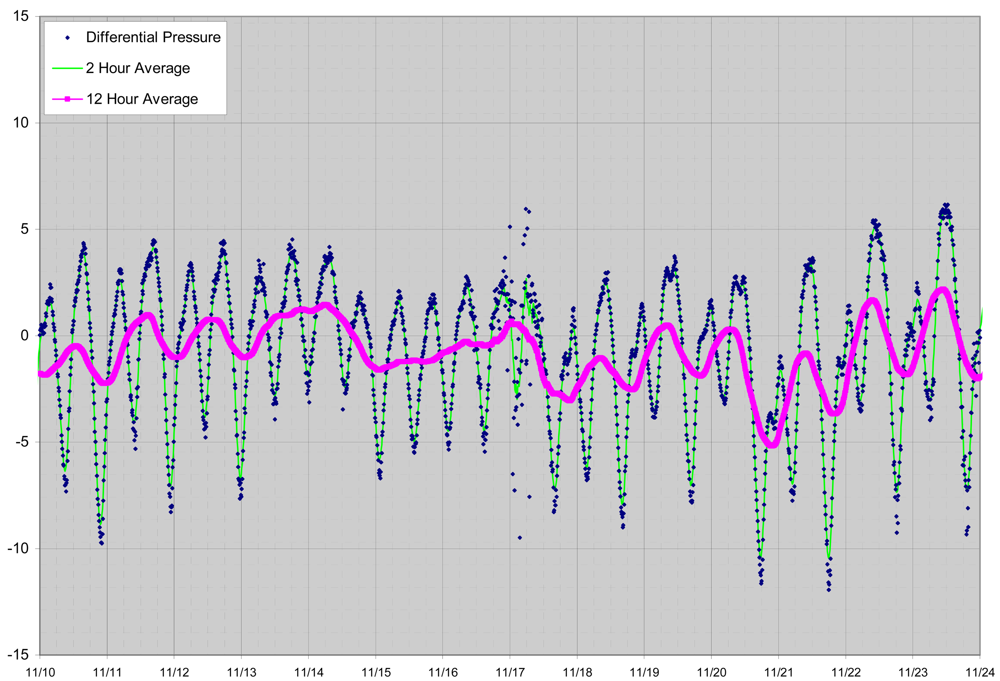
5.2 Field deployments
5.2.1. DP cell failures
5.2.2. CT cell failure
6. Conclusions
References and Notes
- Lee, D.R. A device for measuring seepage flux in lakes and estuaries. Limnol. Oceanogr. 1977, 22, 140–147. [Google Scholar]
- Paulson, R.J.; Smith, C.F.; O'Rourke, D.; Wong, T.-F. Development and evaluation of an ultrasonic ground water seepage meter. Ground Water 2001, 39, 904–911. [Google Scholar]
- Charette, M.A.; Buesseler, K.O.; Andrews, J.A. Utility of radium isotopes for evaluating the input and transport of groundwater-derived nitrogen to a Cape Cod estuary. Limnol. Oceanogr. 2001, 46, 465–470. [Google Scholar]
- Sholkovitz, E.; Herbold, C.; Charette, M. An automated dye-dilution seepage meter for the time-series measurement of submarine groundwater discharge. Limnol. Oceanogr. Meth. 2003, 16–28. [Google Scholar]
- Sophocleous, M. Interactions between groundwater and surface water: the state of the science. Hydrogeol. J. 2002, 10, 52–67. [Google Scholar] [CrossRef]
- Perkin, R.G.; Lewis, E.L. The Practical Salinity Scale 1978: Fitting the data. IEEE J. Ocean. Eng. 1980, OE-5, 9–16. [Google Scholar]
- UNESCO Background papers and supporting data on the International Equation of State of Seawater 1980. UNESCO Techn. Pap. Mar. Sci. 1981, No. 38, 192.
- Langevin, C.D.; Thorne, D.T.; Dausman, A.M., Jr.; Sukop, M.C.; Guo, W. SEAWAT Version 4: A computer program for simulation of multi-species solute and heat transport. In U.S. Geological Survey Techniques and Methods Book 6; 2008; Chapter A22; p. 39. [Google Scholar]
- Henry, M.A. Sampling device. US Pat. 6,470,967, 2000. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressure Range | 0.5 psi=350 mm H2O |
| Span | 35 mV |
| Sensitivity (gain) | 10 mV/mm H2O |
| Null Shift, ΔT=25 °C | ±2.0 mV = ±20 mm H2O |
| Span shift, ΔT=25 °C | ±5% span |
| Non-linearity (P1>P2) | ±0.25% span = 0.88 mm (max ± 1.0% span) |
| Repeatability and Hysteresis | ±0.15% span = 0.53 mm |
| Stability over 1 year | ±0.5% span = 1.75 mm |
| Response time | Max 1 msec |
| Max Overpressure | 20 psi = 14 m H2O |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Gardner, A.T.; Karam, H.N.; Mulligan, A.E.; Harvey, C.F.; Hammar, T.R.; Hemond, H.F. A Differential Pressure Instrument with Wireless Telemetry for In-Situ Measurement of Fluid Flow across Sediment-Water Boundaries. Sensors 2009, 9, 404-429. https://doi.org/10.3390/s90100404
Gardner AT, Karam HN, Mulligan AE, Harvey CF, Hammar TR, Hemond HF. A Differential Pressure Instrument with Wireless Telemetry for In-Situ Measurement of Fluid Flow across Sediment-Water Boundaries. Sensors. 2009; 9(1):404-429. https://doi.org/10.3390/s90100404
Chicago/Turabian StyleGardner, Alan T., Hanan N. Karam, Ann E. Mulligan, Charles F. Harvey, Terence R. Hammar, and Harold F. Hemond. 2009. "A Differential Pressure Instrument with Wireless Telemetry for In-Situ Measurement of Fluid Flow across Sediment-Water Boundaries" Sensors 9, no. 1: 404-429. https://doi.org/10.3390/s90100404
APA StyleGardner, A. T., Karam, H. N., Mulligan, A. E., Harvey, C. F., Hammar, T. R., & Hemond, H. F. (2009). A Differential Pressure Instrument with Wireless Telemetry for In-Situ Measurement of Fluid Flow across Sediment-Water Boundaries. Sensors, 9(1), 404-429. https://doi.org/10.3390/s90100404