Simulated Effects of Soil Temperature and Salinity on Capacitance Sensor Measurements

Abstract
:1. Introduction
1.1 Previous Sensor Applications and Testing
1.2 Conversion of Frequency Measurements to Permittivities
2. Methods
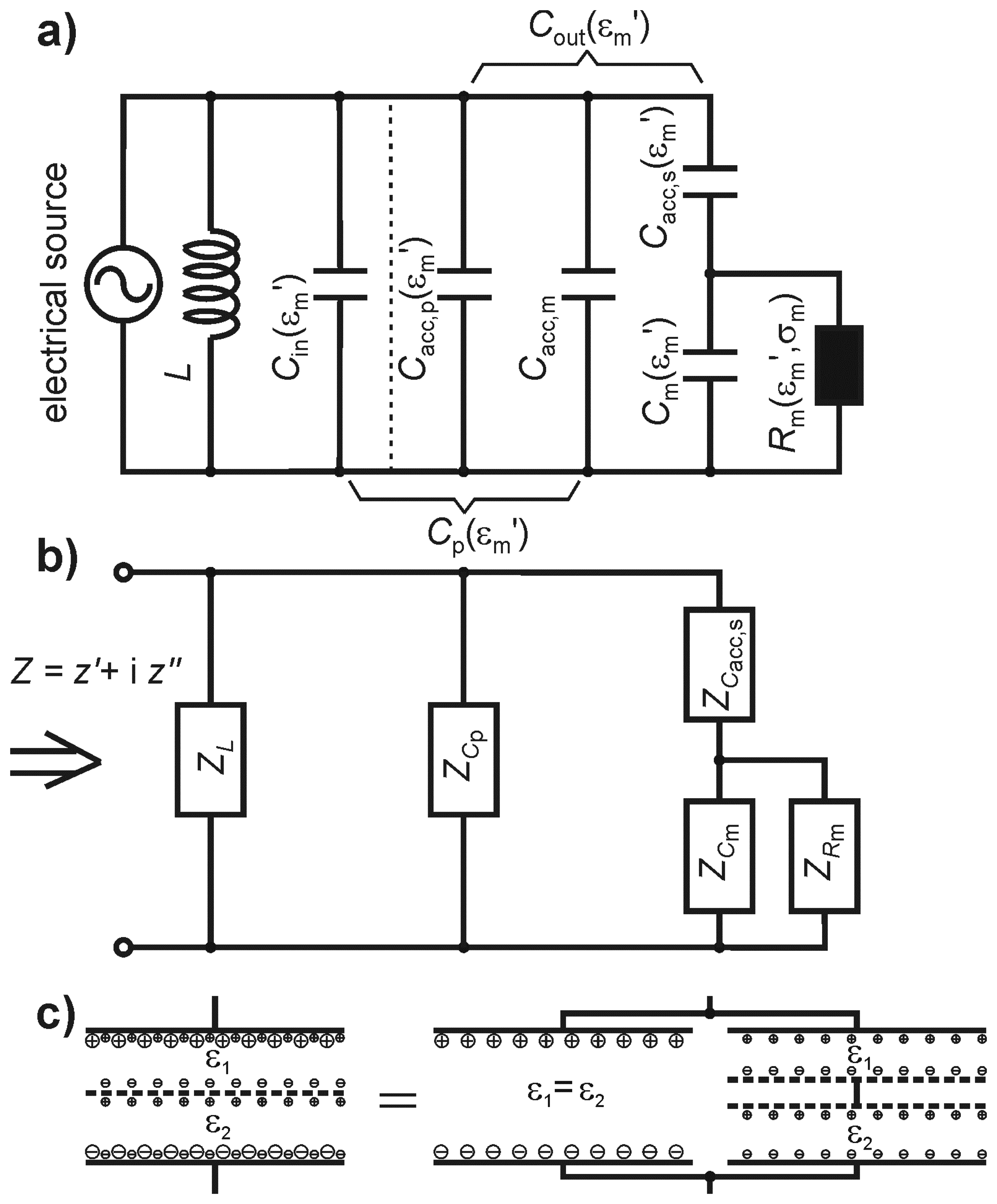
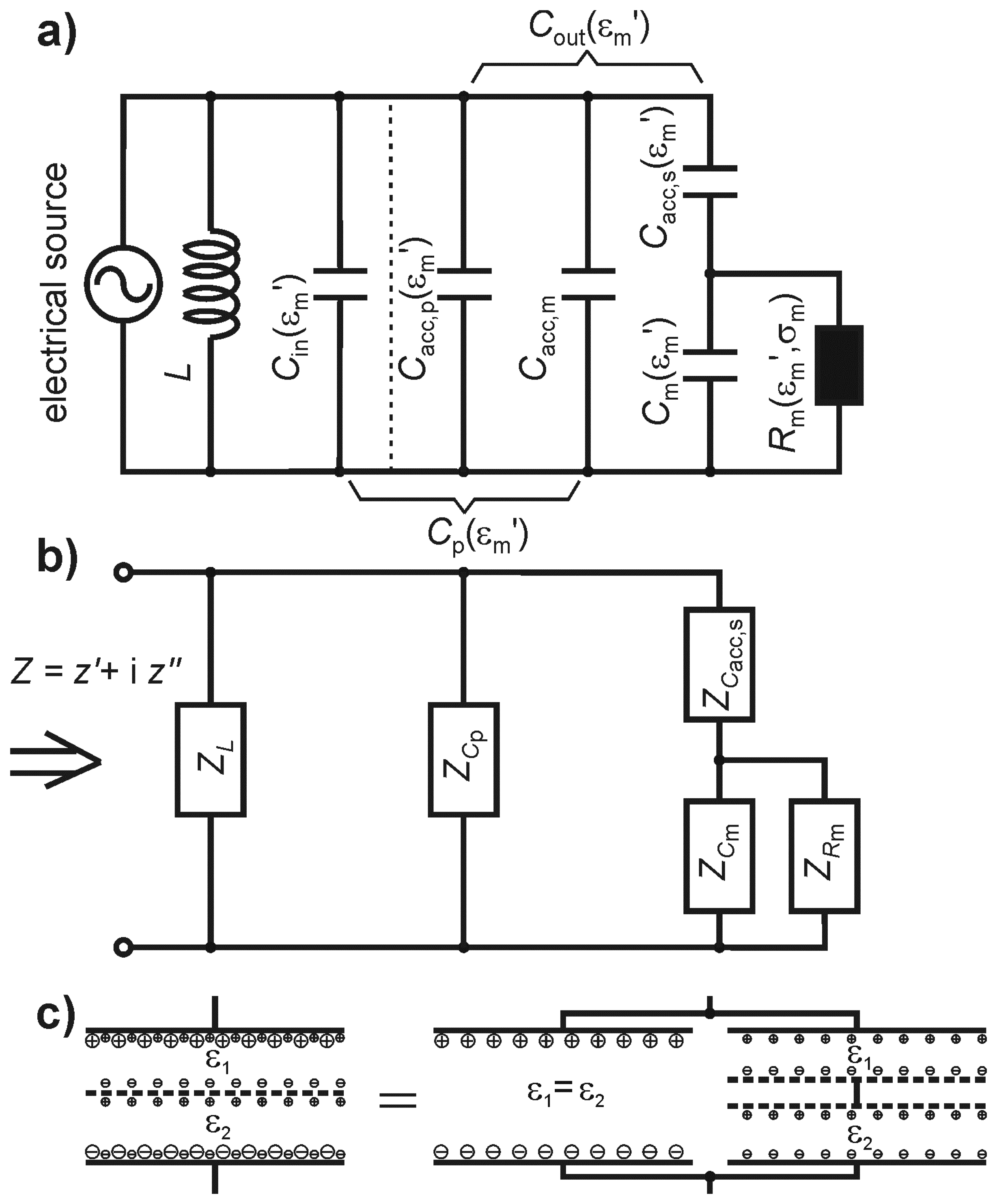
2.1 Electrical Circuit Analogue
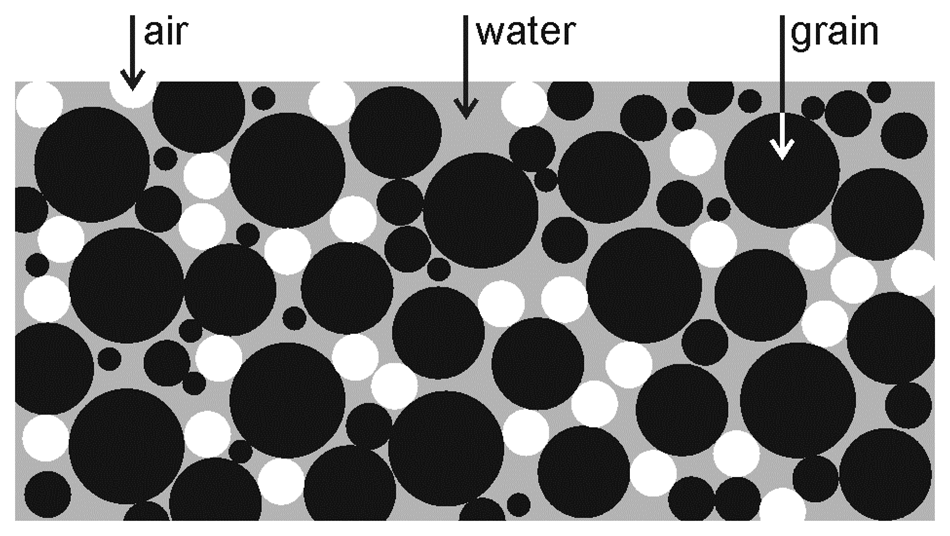
2.2 Electrical Properties of Porous Media
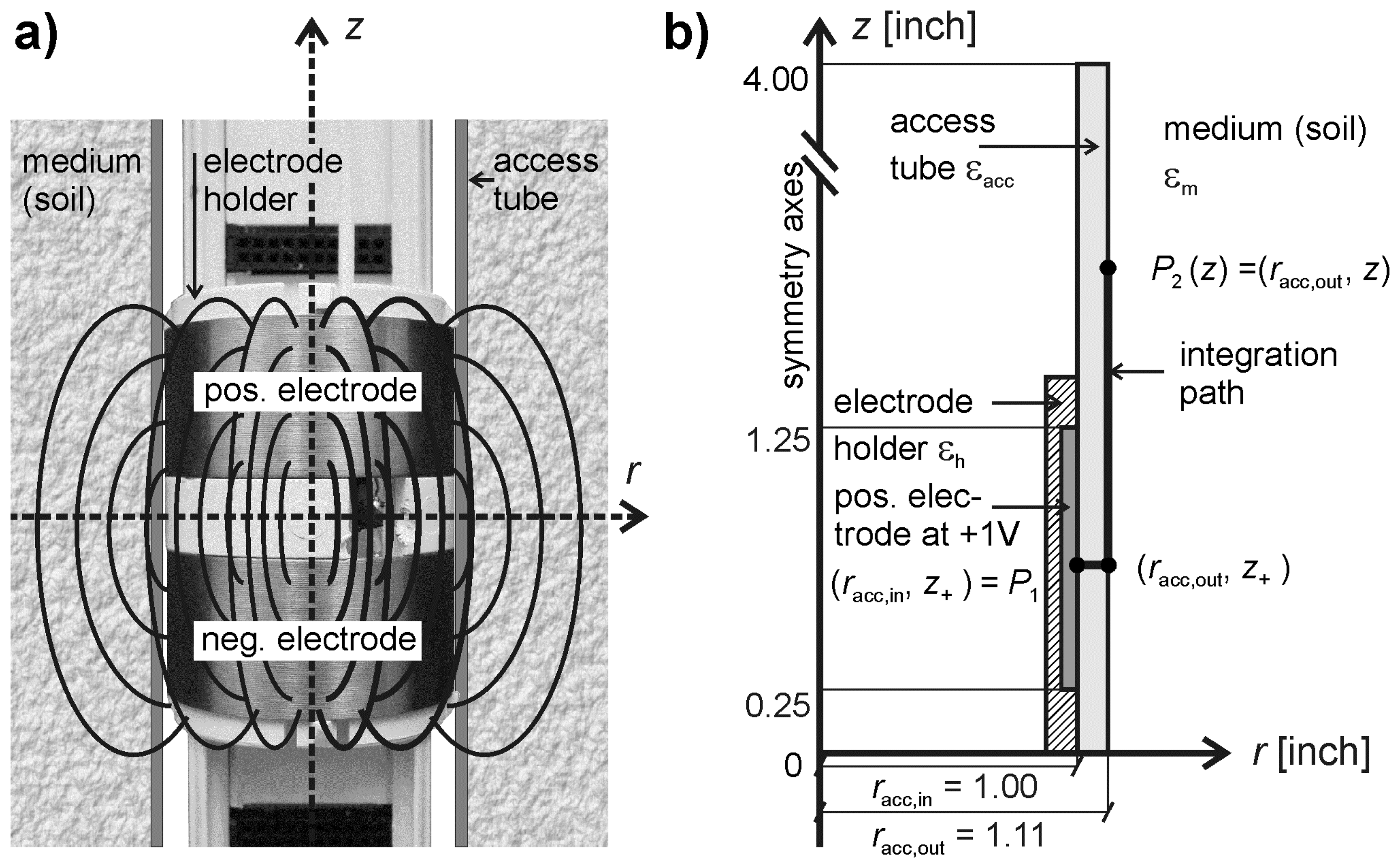
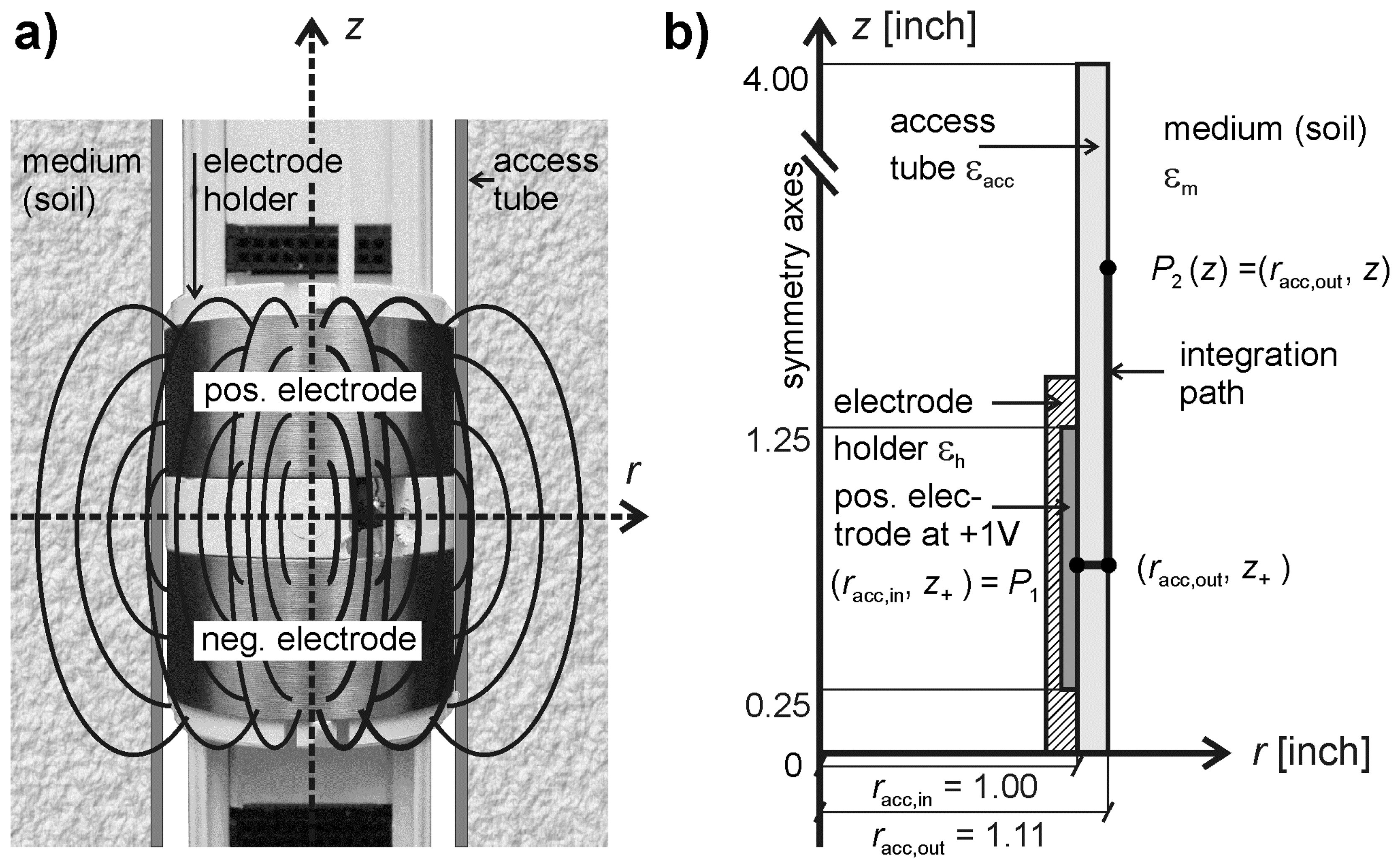
2.3 Electric Field Simulations
2.4 Components of the Circuit Diagram
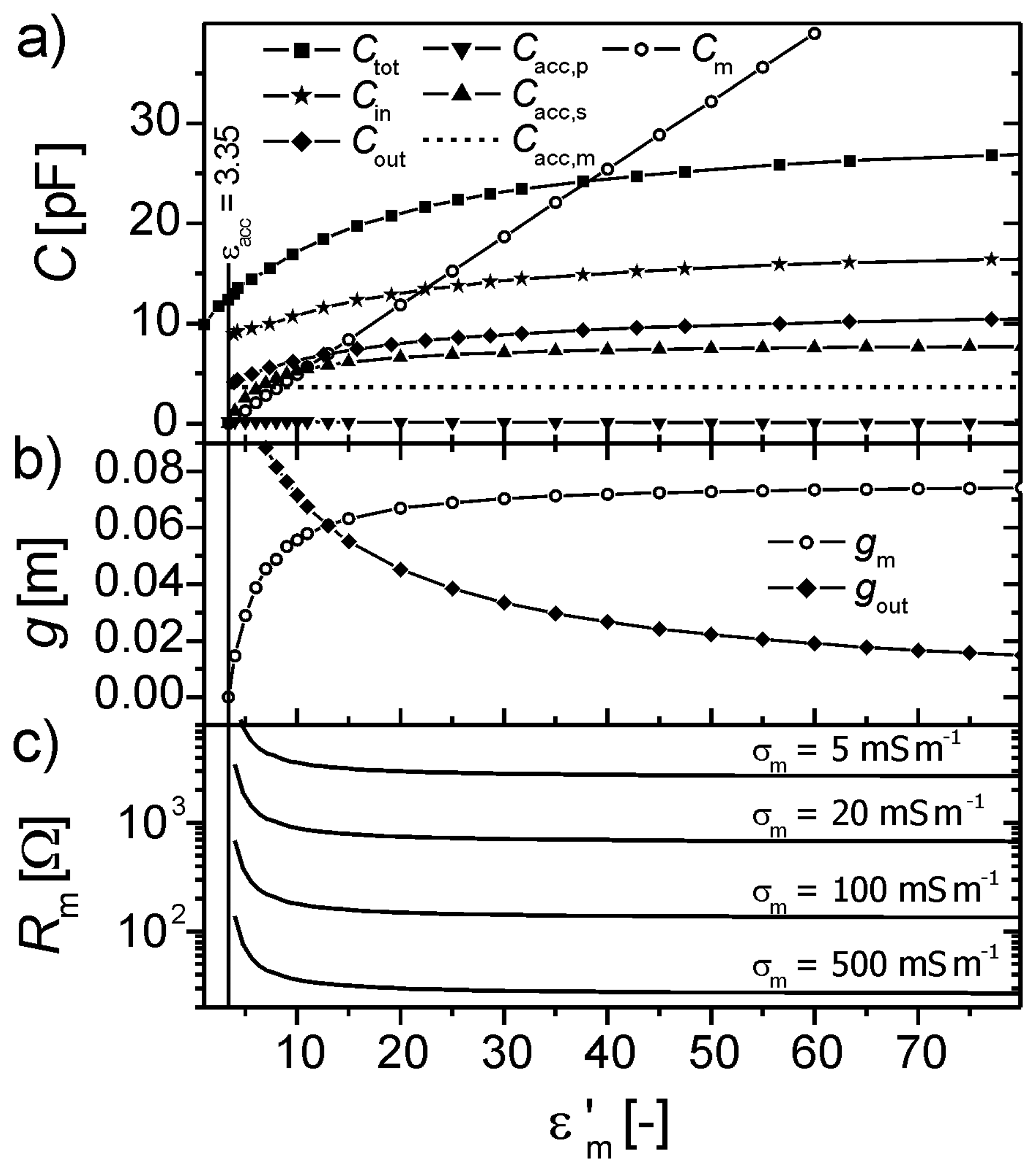
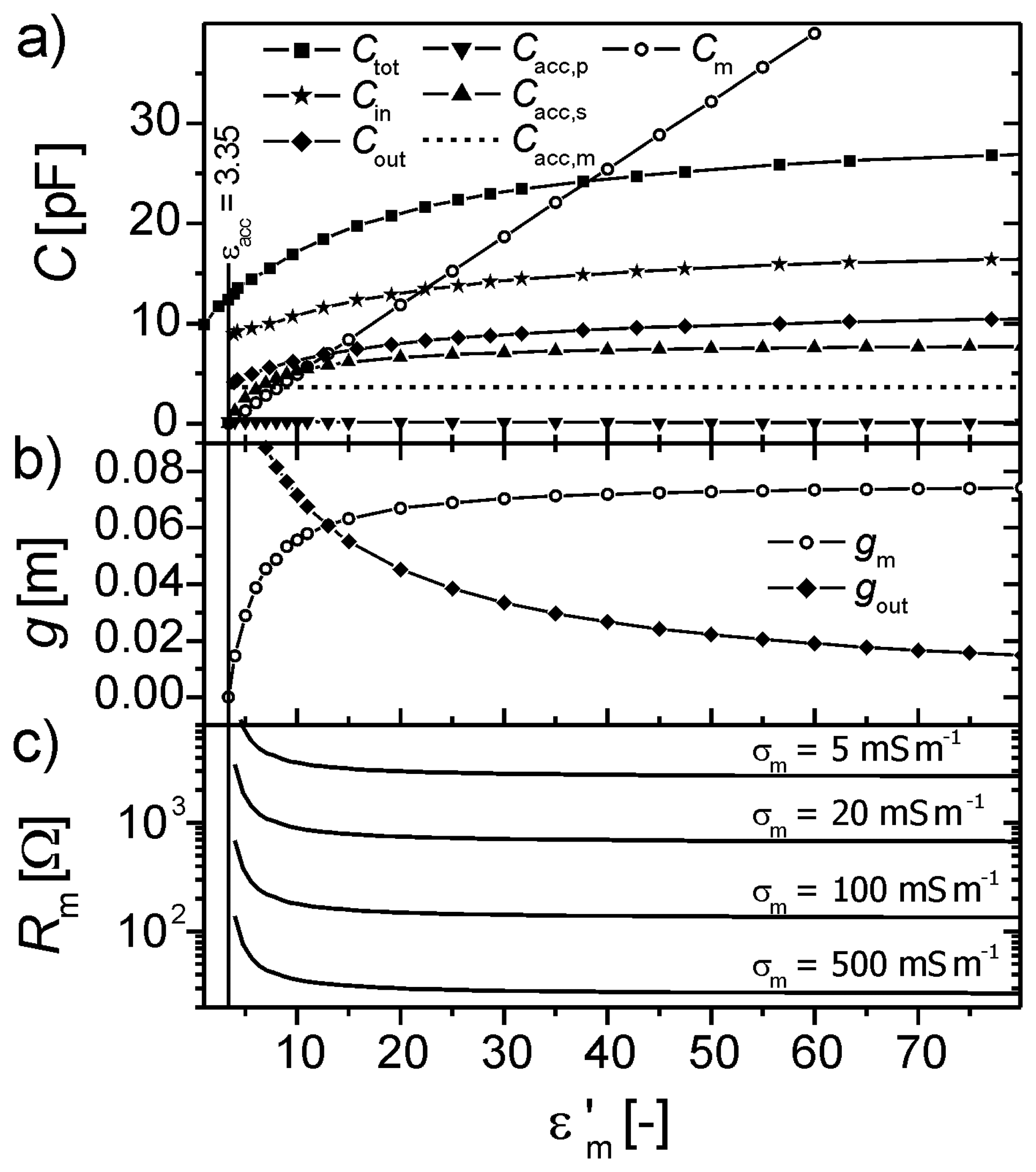
2.4.1 Capacitances
2.4.2 Resistor
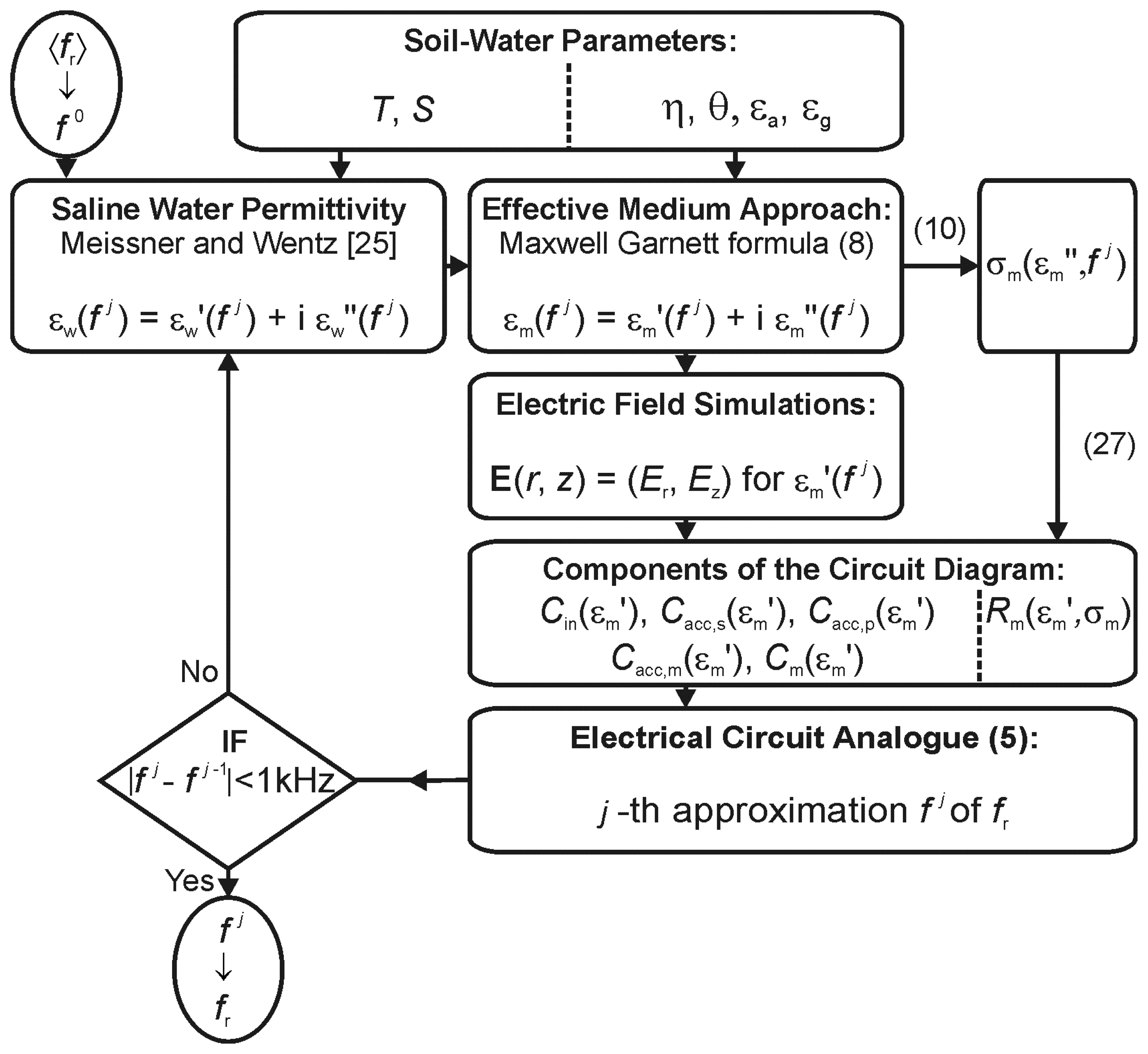
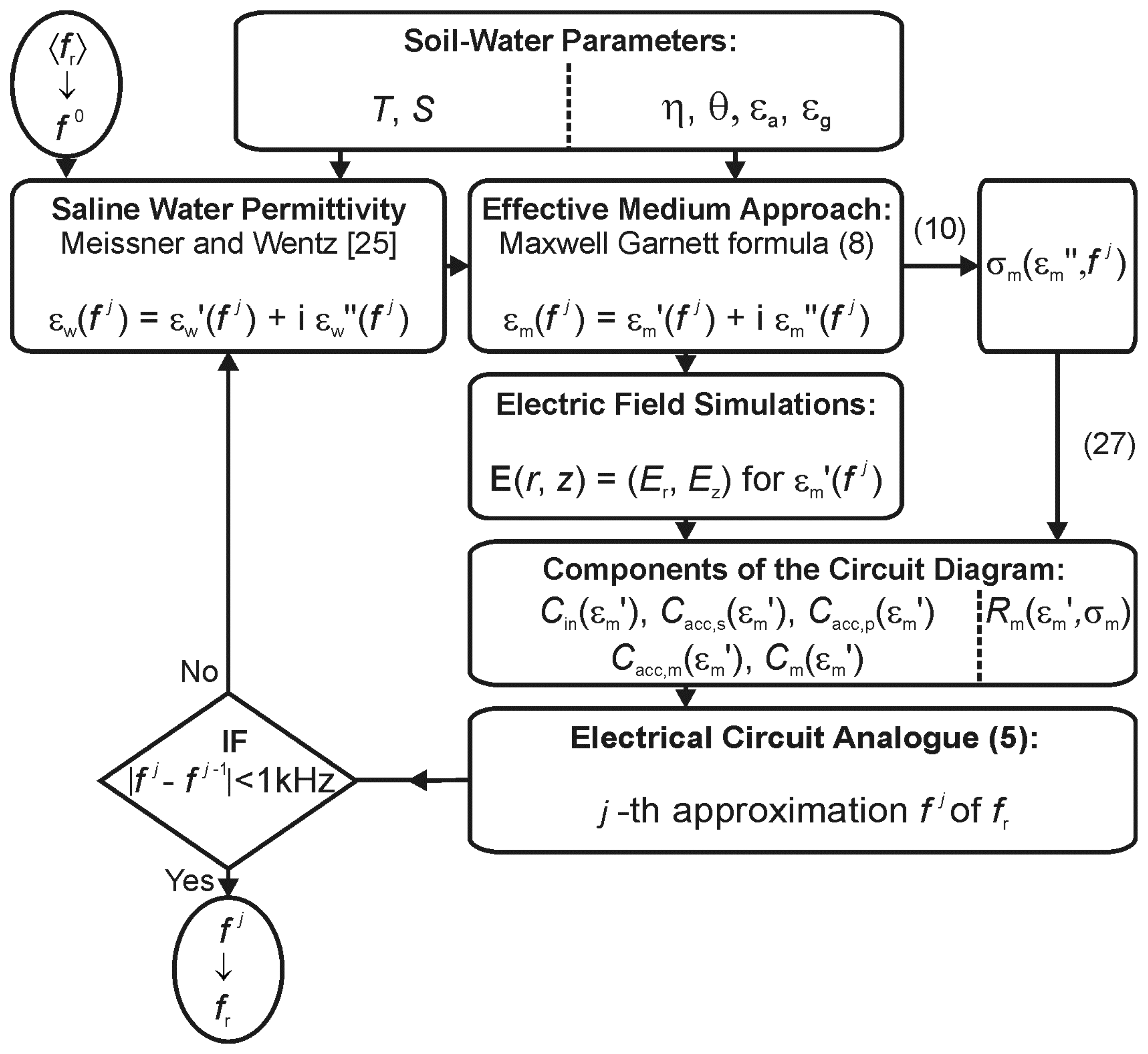
2.5 Iterative Solution Method for the Sensor Resonant Frequency
3. Results and Discussion
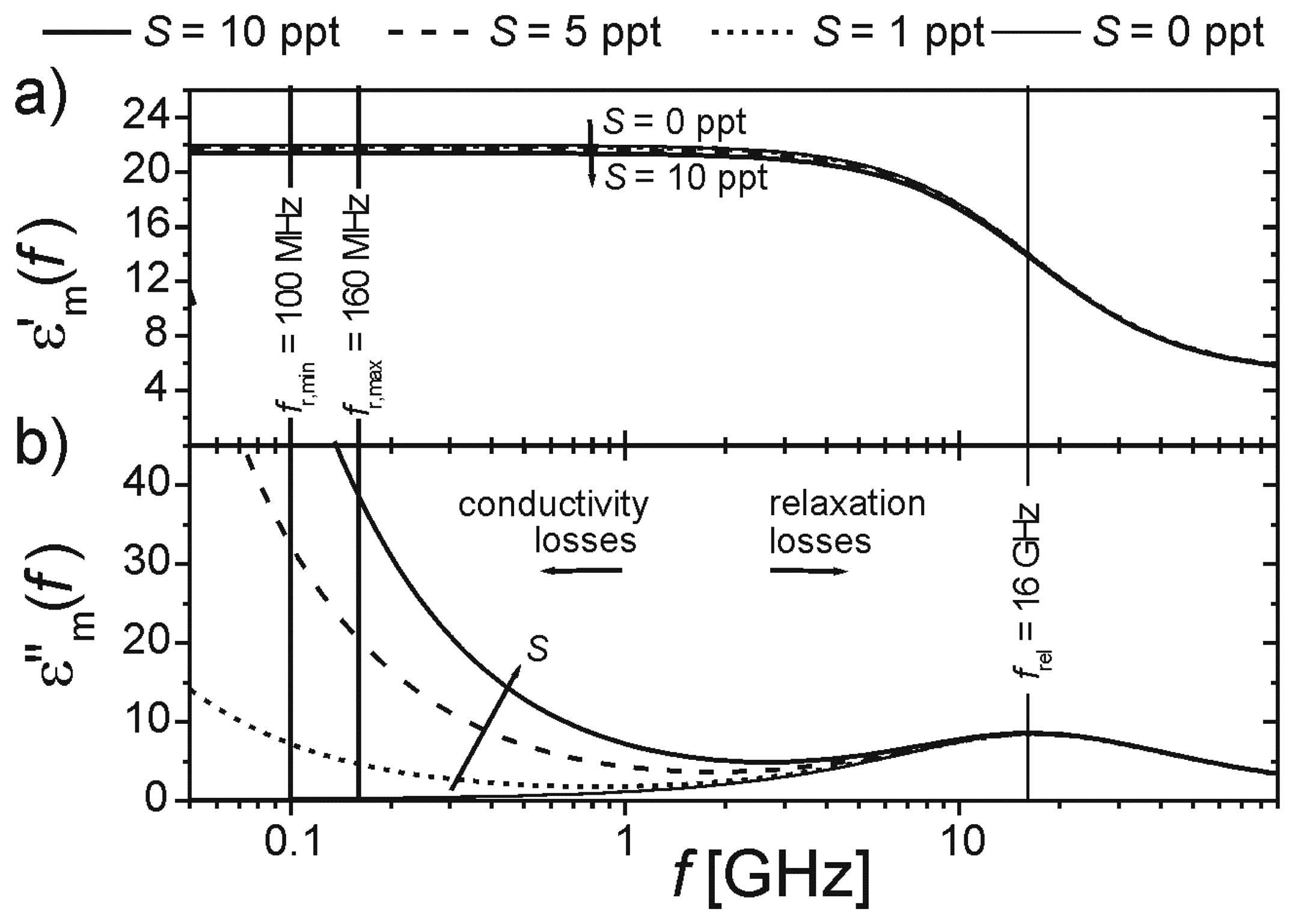
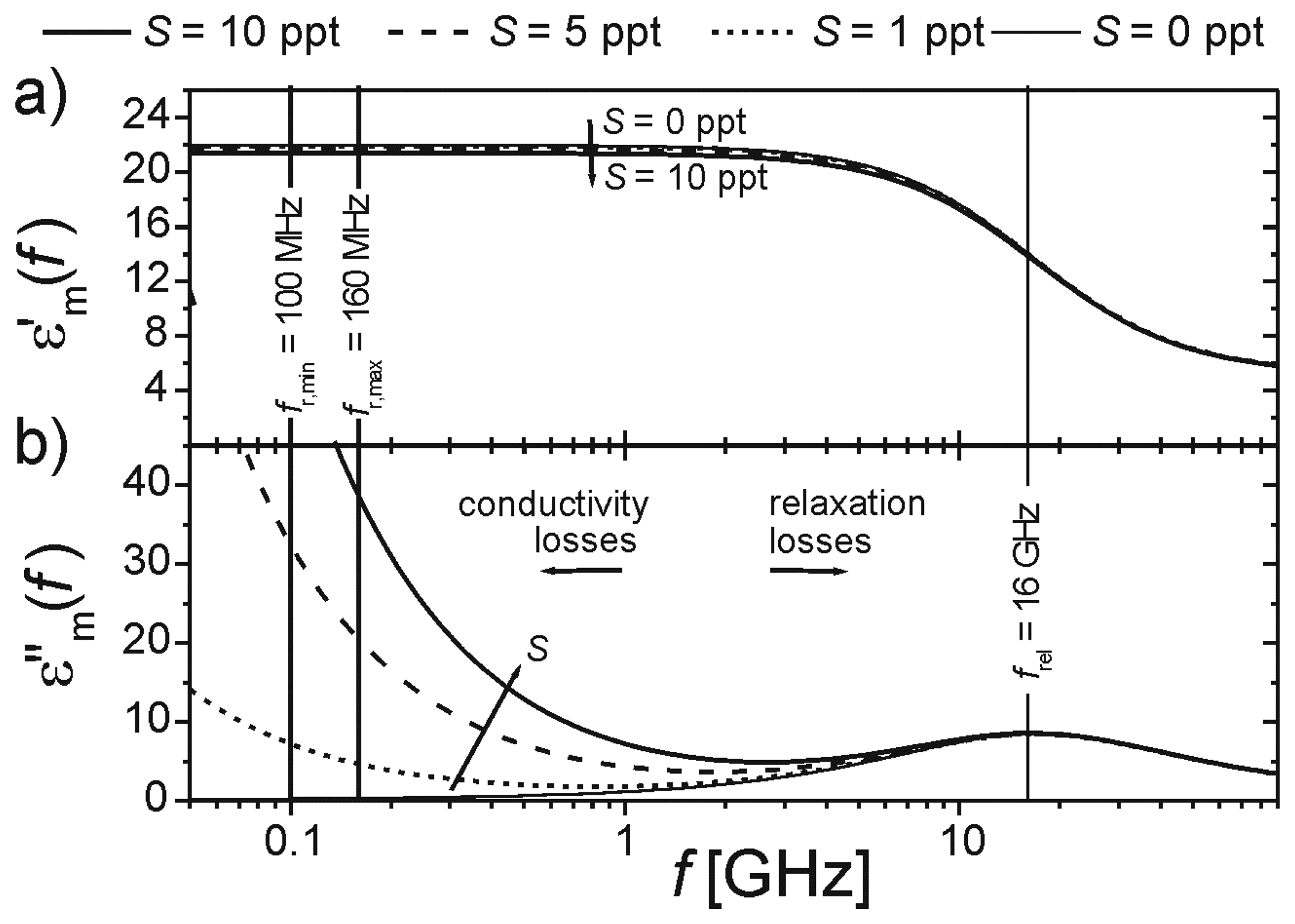
3.1 Frequency-Dependent Permittivity of Porous Media
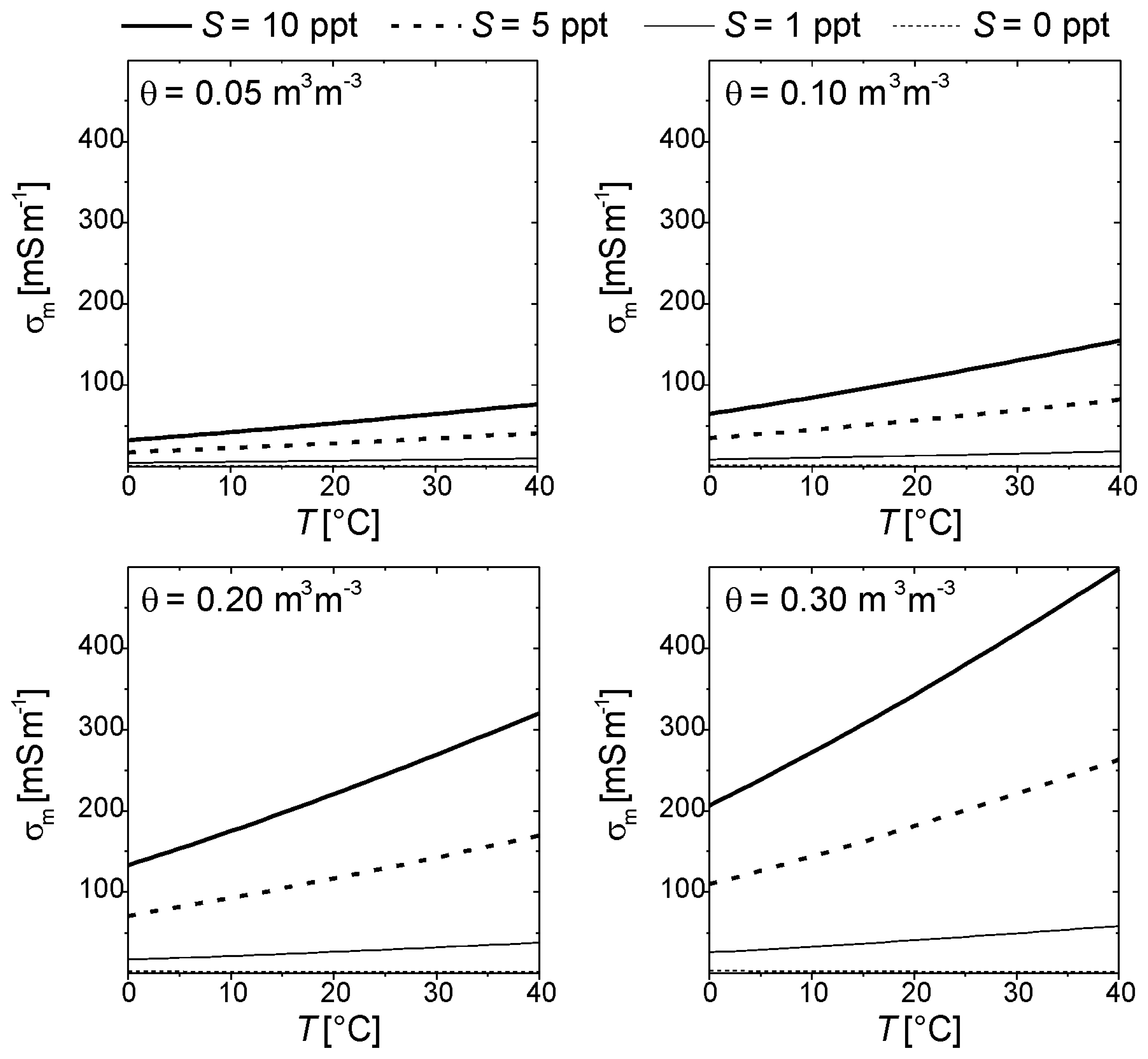
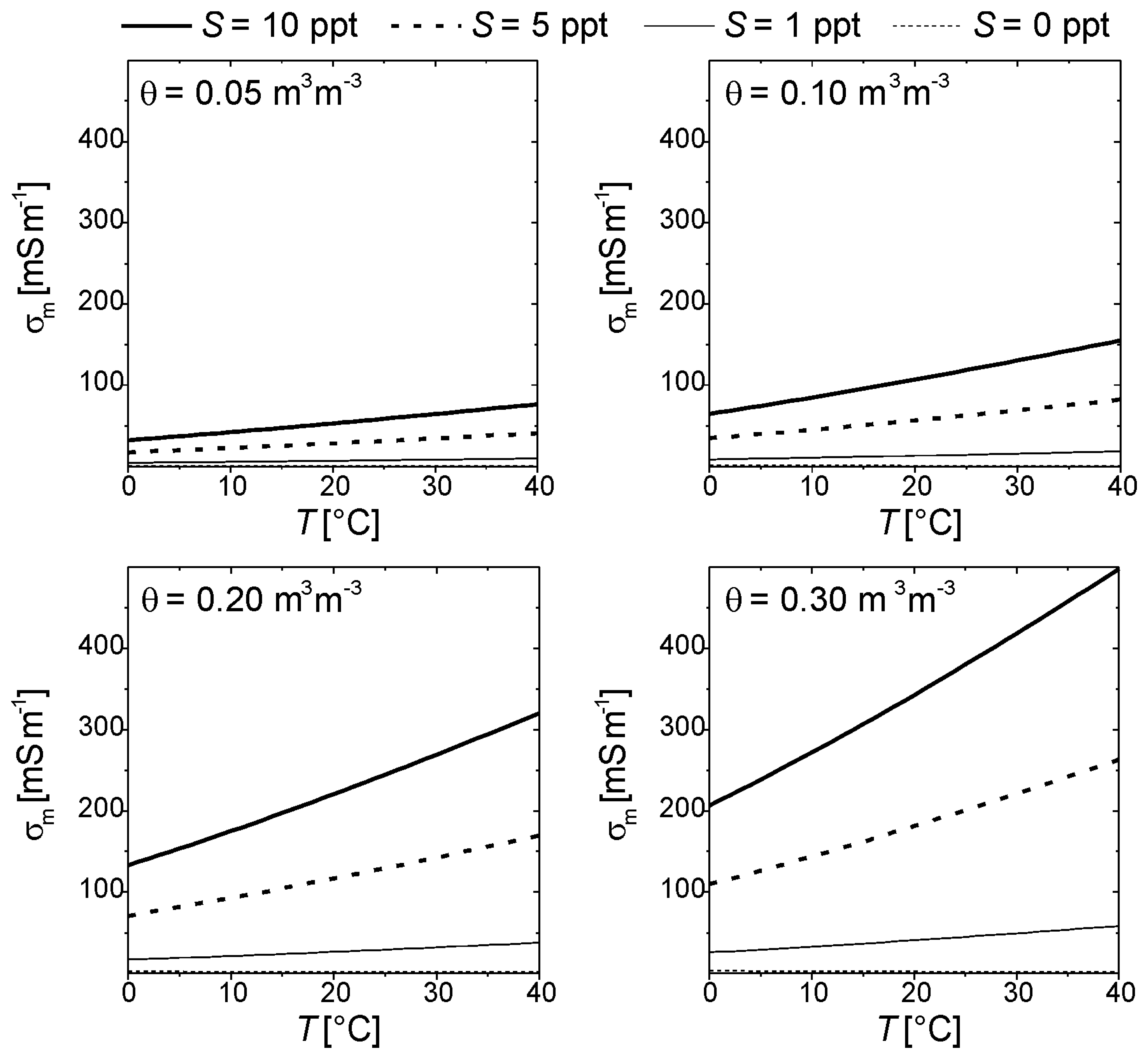
3.2 Temperature Dependencies of Permittivity and Electrical Conductivity
3.3 Numerical Simulations of Electrical Fields
3.4 Sensor Outputs
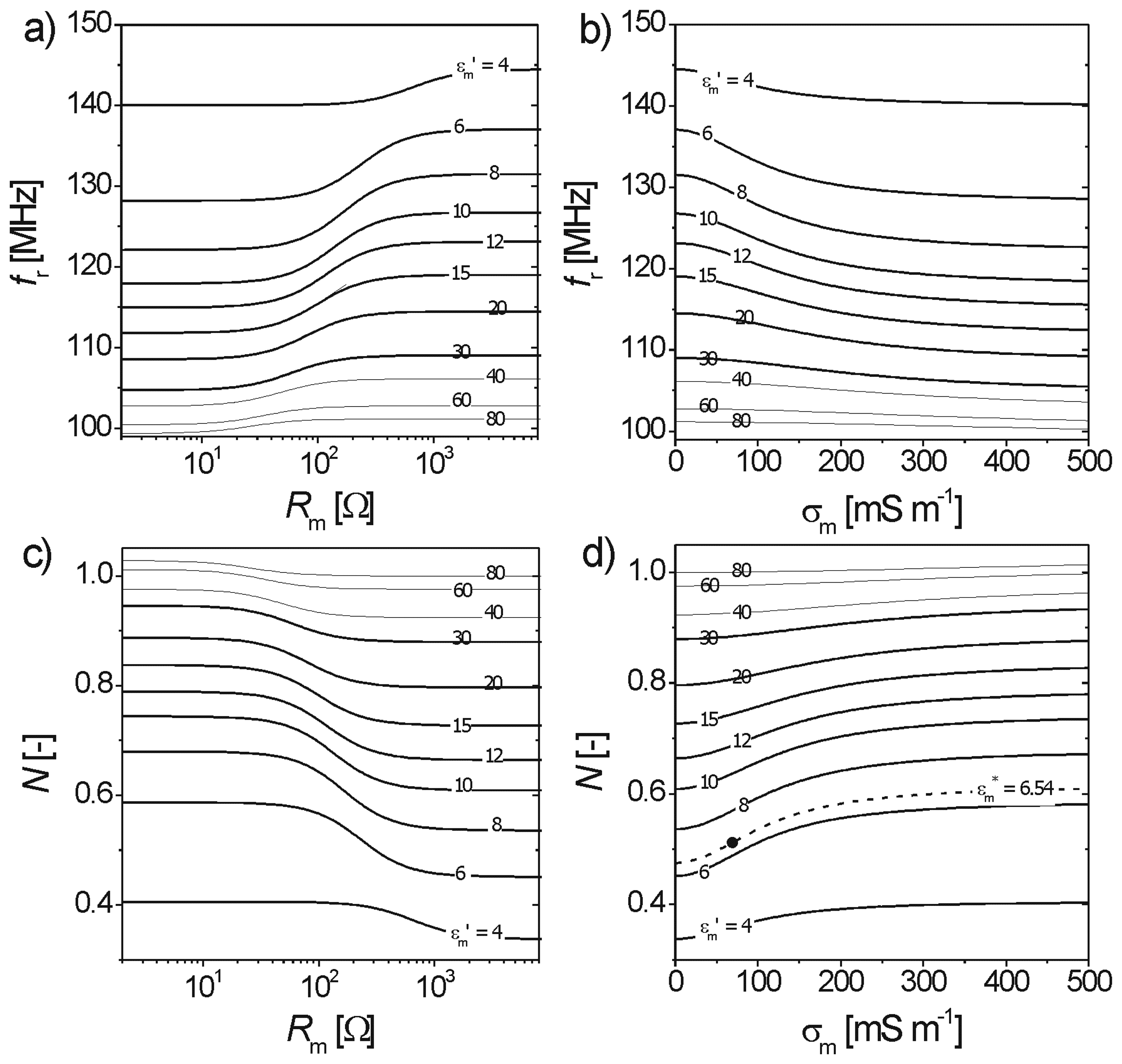
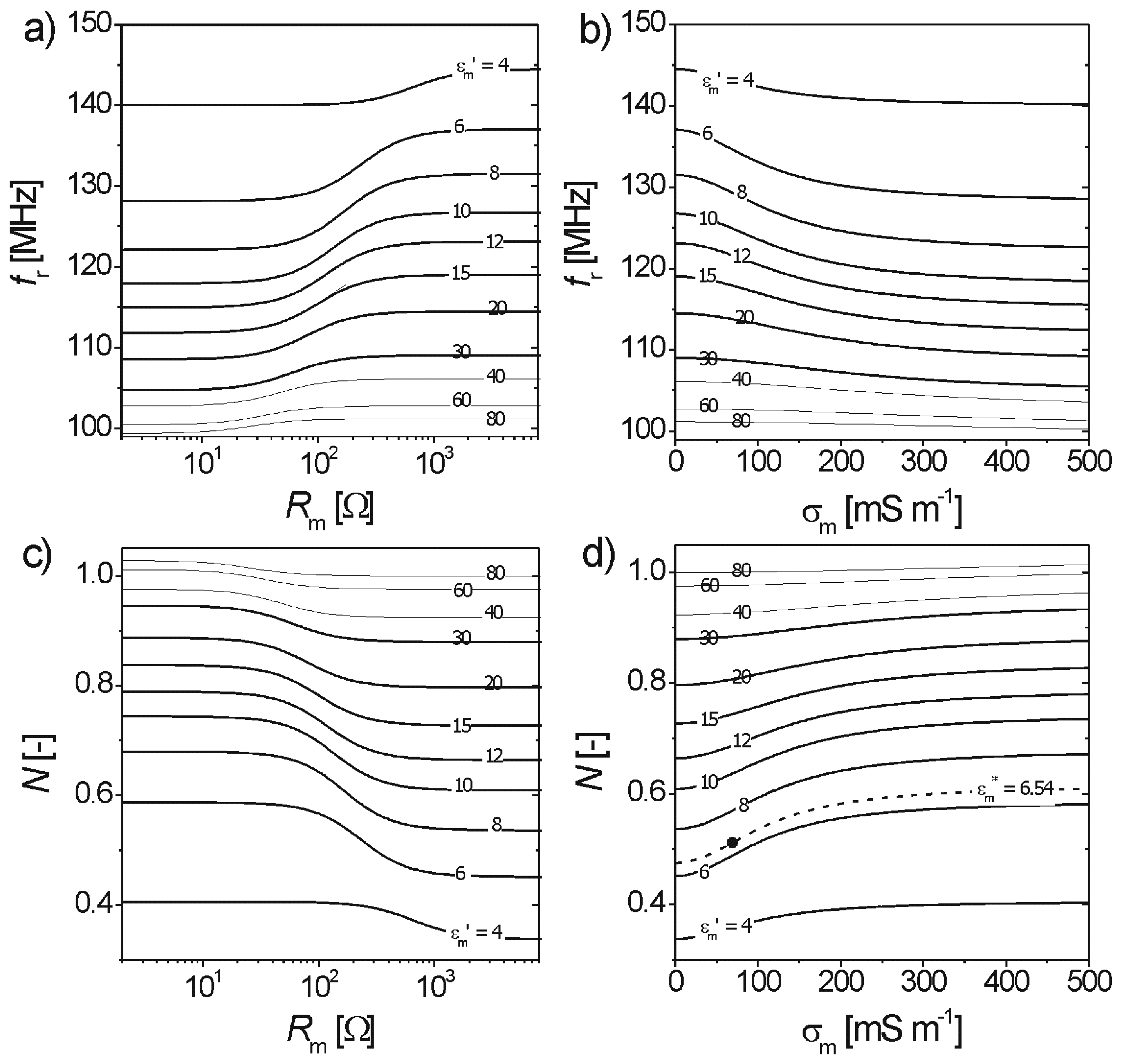
3.4.1 Sensor Resonant Frequency derived from the Circuit Diagram
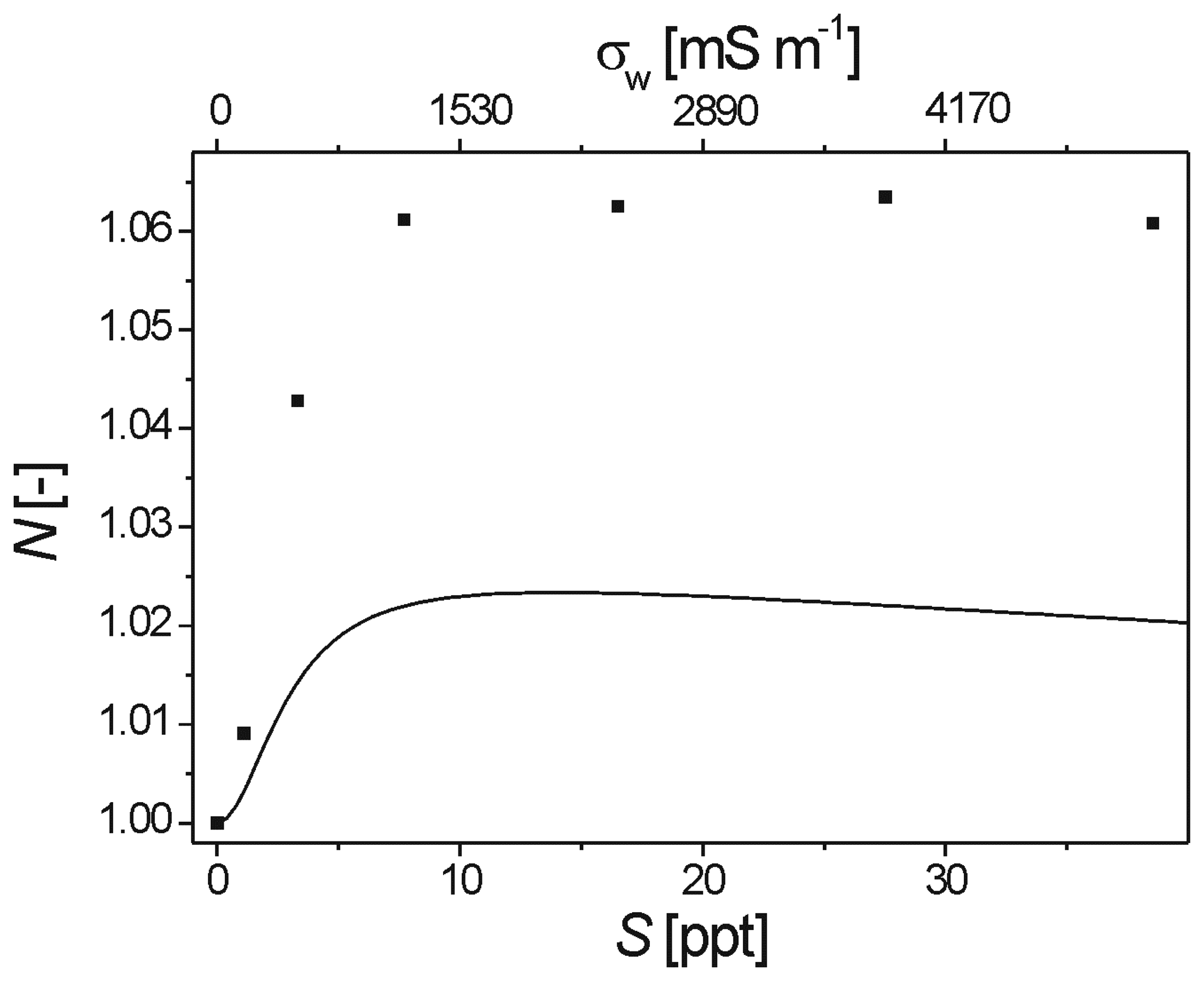
3.4.2 Temperature Dependence of Resonant Frequency and Normalized Reading
4. Summary and Conclusions
Acknowledgments
References
- Fares, A.; Hamdhani, H.; Jenkins, D.M. Temperature-Dependent Scaled Frequency: Improved Accuracy of Multisensor Capacitance Probes. Soil Sci. Soc. Am. J. 2007, 71(3). accepted for publication. [Google Scholar]
- Bakhtina, E.Y.; Il'in, V.A. Investigation of dielectric properties of sand at cryogenic temperatures. Journal of Communications Technology and Electronics 1999, 44(8), 939–941. [Google Scholar]
- Baumhardt, R.L.; Lascano, R.J.; Evett, S.R. Soil material, temperature, and salinity effects on calibration of multisensor capacitance probes. Soil Sci. Soc. Am. J. 2000, 64(6), 1940–1946. [Google Scholar]
- Jones, S.B.; Or, D. Surface area, geometrical and configurational effects on permittivity of porous media. Journal of Non-Crystalline Solids 2002, 305(1-3), 247–254. [Google Scholar]
- Logsdon, S.; Laird, D. Cation and water content effects on dipole rotation activation energy of smectites. Soil Sci. Soc. Am. J. 2004, 68(5), 1586–1591. [Google Scholar]
- Seyfried, M.S.; Murdock, M.D. Response of a new soil water sensor to variable soil, water content, and temperature. Soil Sci. Soc. Am. J. 2001, 65(1), 28–34. [Google Scholar]
- Seyfried, M.S.; Murdock, M.D. Measurement of soil water content with a 50-MHz soil dielectric sensor. Soil Sci. Soc. Am. J. 2004, 68(2), 394–403. [Google Scholar]
- Wraith, J.M.; Or, D. Temperature effects on soil bulk dielectric permittivity measured by time domain reflectometry: Experimental evidence and hypothesis development. Water Resources Research 1999, 35(2), 361–369. [Google Scholar]
- Blonquist, J.M., Jr.; Jones, S.B.; Robinson, D.A. Standardizing Characterization of Electromagnetic Water Content Sensors: Part 2. Evaluation of Seven Sensing Systems. Vadose Zone J. 2005, 4(4), 1059–1069. [Google Scholar]
- Jones, S.B.; Blonquist, J. M., Jr.; Robinson, D. A.; Rasmussen, V. P.; Or, D. Standardizing Characterization of Electromagnetic Water Content Sensors: Part 1. Methodology. Vadose Zone J. 2005, 4(4), 1048–1058. [Google Scholar]
- Gong, Y.; Cao, Q.; Sun, Z. The effects of soil bulk density, clay content and temperature on soil water content measurement using time-domain reflectometry. Hydrological Processes 2003, 17(18), 3601–6314. [Google Scholar]
- Evett, S.R.; Tolk, J.A.; Howell, T.A. Soil Profile Water Content Determination: Sensor Accuracy, Axial Response, Calibration, Temperature Dependence, and Precision. Vadose Zone J. 2006, 5(3), 894–907. [Google Scholar]
- Or, D.; Wraith, J.M. Temperature effects on soil bulk dielectric permittivity measured by time domain reflectometry: A physical model. Water Resources Research 1999, 35(2), 371–383. [Google Scholar]
- Kelleners, T.J.; Soppe, R.W.O.; Robinson, D.A.; Schaap, M.G.; Ayars, J.E.; Skaggs, T.H. Calibration of capacitance probe sensors using electric circuit theory. Soil Sci. Soc. Am. J. 2004, 68(2), 430–439. [Google Scholar]
- Robinson, D.A.; Kelleners, T.J.; Cooper, J.D.; Gardner, C.M.K.; Wilson, P.; Lebron, I.; Logsdon, S. Evaluation of a Capacitance Probe Frequency Response Model Accounting for Bulk Electrical Conductivity: Comparison with TDR and Network Analyzer Measurements. Vadose Zone J. 2005, 4(4), 992–1003. [Google Scholar]
- Robinson, D.A.; Jones, S.B.; Wraith, J.M.; Or, D.; Friedman, S.P. A Review of Advances in Dielectric and Electrical Conductivity Measurement in Soils Using Time Domain Reflectometry. Vadose Zone J. 2003, 2(4), 444–475. [Google Scholar]
- Paltineanu, I.C.; Starr, J.L. Real-time soil water dynamics using multisensor capacitance probes: Laboratory calibration. Soil Sci. Soc. Am. J. 1997, 61, 1576–1585. [Google Scholar]
- Schwank, M.; Green, T.R.; Mätzler, C.; Benedickter, H.; Flühler, H. Laboratory Characterization of a Commercial Capacitance Sensor for Estimating Permittivity and Inferring Soil Water Content. Vadose Zone J. 2006, 5(3), 1048–1064. [Google Scholar]
- Starr, J.L.; Timlin, D.J. Using High-Resolution Soil Moisture Data to Assess Soil Water Dynamics in the Vadose Zone. Vadose Zone J. 2004, 3(3), 926–935. [Google Scholar]
- Terman, F.E. Radio engineers' handbook.Vol., 1st ed.; 6th impr; 1943; New York; McGraw-Hill; p. 1019. [Google Scholar]
- Sihvola, A. Electromagnetic mixing formulas and applications.; Electromagnetic Waves Series 47; 1999; London; The Institution of Electrical Engineers. [Google Scholar]
- Maxwell Garnett, J.C. Colours in metal glasses and metal films. Trans. Royal Society (London) 1904, CCIII, 197–202. [Google Scholar]
- Santamarina, J.C.; Klein, K.A.; Fam, M.A. Soils and Wave.; 2001; Hoboken; NJ John Wiley & Sons. [Google Scholar]
- Mätzler, C. in Minerals and rocks; Thermal Microwave Radiation-Applications for Remote Sensing; 2006; London, UK. [Google Scholar]
- Meissner, T.; Wentz, F.J. The complex dielectric constant of pure and sea water from microwave satellite observations. IEEE Trans. Geosci. Remote Sensing 2004, 42(9), 1836–1849. [Google Scholar]
- Haus, H.A.; Melcher, J.R. Electromagnetic Fields and Energy. 1998. available from: http://web.mit.edu/6.013_book/www/ [cited 11 Oct. 2006].
- Jackson, J.D. Classical Electrodynamics., Third ed.; 1999; Wiley, cop., 1999; p. 808.
- Kelleners, T.J.; Soppe, R.W.O.; Ayars, J.E.; Skaggs, T.H. Calibration of capacitance probe sensors in a saline silty clay soil. Soil Sci. Soc. Am. J. 2004, 68, 770–778. [Google Scholar]
- Evett, S.R.; Lauerent, J.P.; Cepuder, P.; Hignett, C. Neutron scattering, capacitance, and TDR soil water content measurements compared on four continents. Proc. 17th World Congress Soil. Sci., Thailand, 14-21 Aug. 2002; pp. 1021-1–1021-10.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| εm′ [-] | Cacc,s [pF] | Cm [pF] | Cp [pF] |
|---|---|---|---|
| 4 | 1.22 | 0.52 | 12.83 |
| 6 | 3.38 | 2.06 | 13.39 |
| 6.54 | 3.75 | 2.47 | 13.51 |
| 8 | 4.50 | 3.46 | 13.97 |
| 10 | 5.19 | 4.93 | 14.62 |
| 12 | 5.66 | 6.33 | 15.18 |
| 15 | 6.13 | 8.39 | 15.91 |
| 20 | 6.61 | 11.84 | 16.77 |
| 30 | 7.09 | 18.65 | 18.03 |
| 40 | 7.34 | 25.43 | 18.75 |
| 60 | 7.59 | 38.98 | 19.74 |
| 80 | 7.71 | 52.53 | 20.19 |
© 2007 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Schwank, M.; Green, T.R. Simulated Effects of Soil Temperature and Salinity on Capacitance Sensor Measurements. Sensors 2007, 7, 548-577. https://doi.org/10.3390/s7040548
Schwank M, Green TR. Simulated Effects of Soil Temperature and Salinity on Capacitance Sensor Measurements. Sensors. 2007; 7(4):548-577. https://doi.org/10.3390/s7040548
Chicago/Turabian StyleSchwank, Mike, and Timothy R. Green. 2007. "Simulated Effects of Soil Temperature and Salinity on Capacitance Sensor Measurements" Sensors 7, no. 4: 548-577. https://doi.org/10.3390/s7040548
APA StyleSchwank, M., & Green, T. R. (2007). Simulated Effects of Soil Temperature and Salinity on Capacitance Sensor Measurements. Sensors, 7(4), 548-577. https://doi.org/10.3390/s7040548