About Optimal Fractional Hold Circuits for Inter- sample Output Reconstruction in Sampled-data Systems

Abstract
:1. Introduction
2. Results and Discussion
2.1. Continuous-Time Plant
2.2. Inter-Sample Description
2.3. Approximate Output Description of the Inter- Sample Behavior
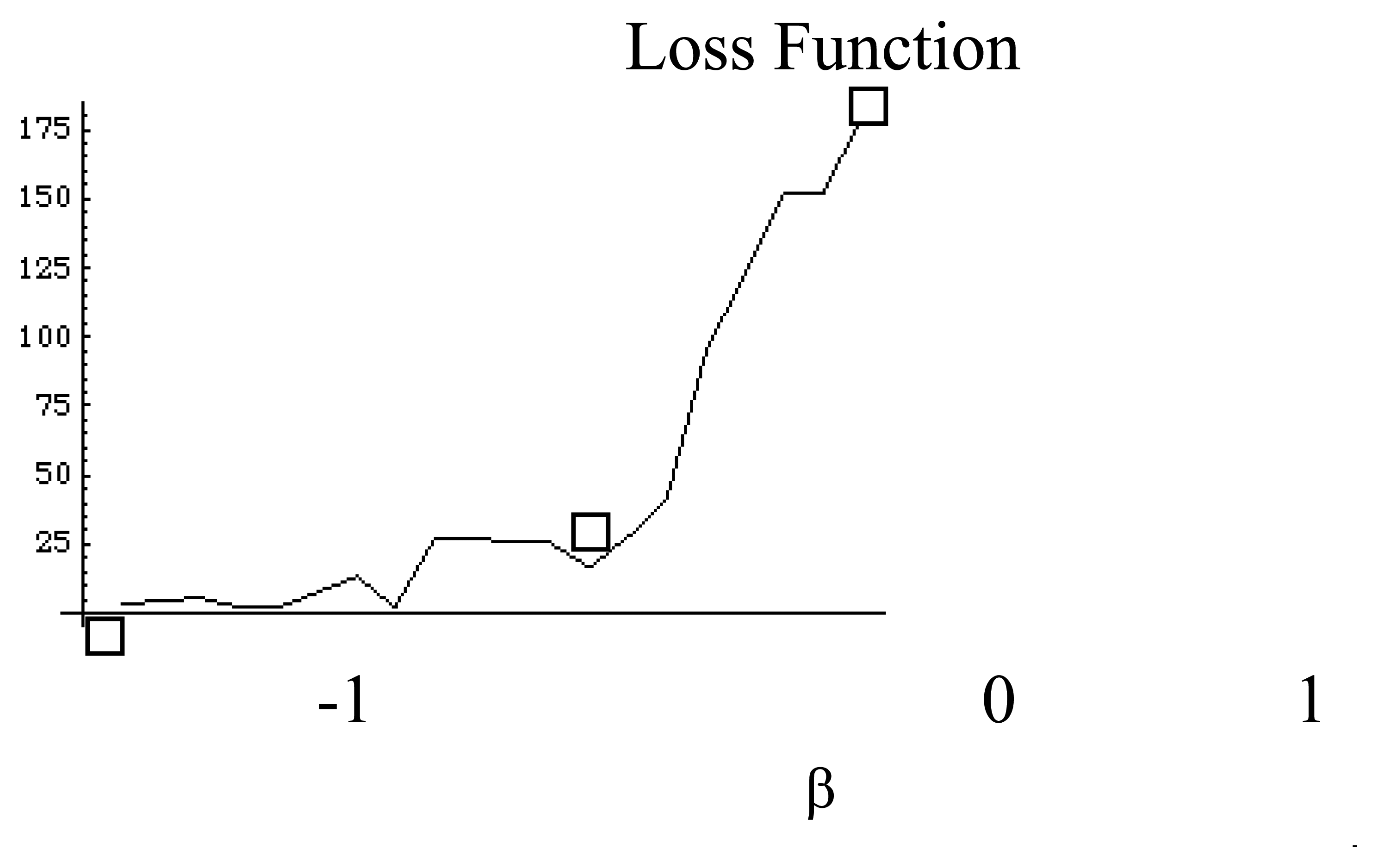
2.4. Choice of β for Minimal Output Deviations In–Between Samples
- Modification 1. The correcting gains are averaged over a set of consecutive samples so that:β̅αk is replaced with its average for k ∈ ⌊ki +1, ki+1) for an ordered set of marked samples {ki} which may be chosen according to the transient performance characteristics. Then (13), subject to (10)-(12), is applied by replacing β̅ αk → β̅ avk . With this choice, the correcting gain is still modified at each sample but less abruptly than in the basic rule. A slight modification is as follows. Choose a sequence of strictly ordered marked samples (N being very large approximating infinity). This marked sequence may be predefined or online chosen according to the transient performance characteristics being finite or, even, selected with constant differences (ki+1−ki) for any testing time. Then, replace which is constant for all k∈⌊ki+1,ki+1)
- Modification 2. The correcting gains are averaged over a set of consecutive samples so that:β̄αk is replaced with its average for all k. Then , (13) is applied with the replacement β̅ αk → β̅ av. In practice, the above limit may be replace for a sufficiently large time interval taking account of the transient period.
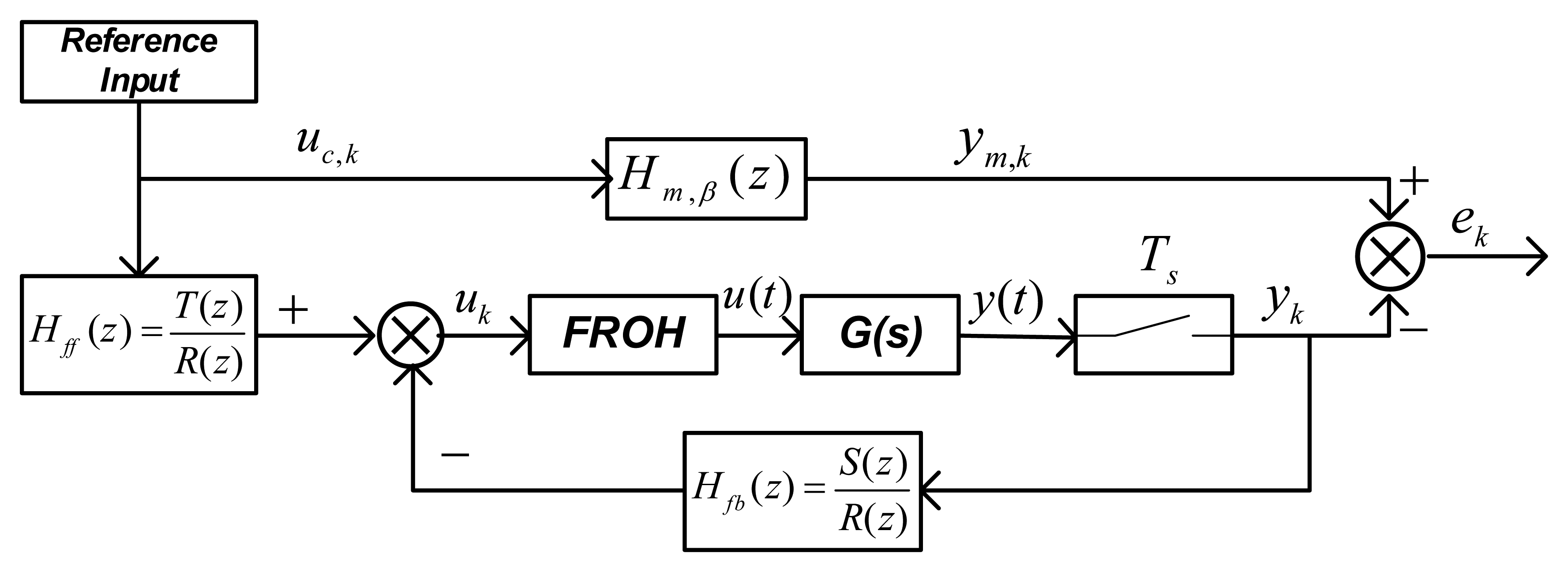
3. Experimental Section
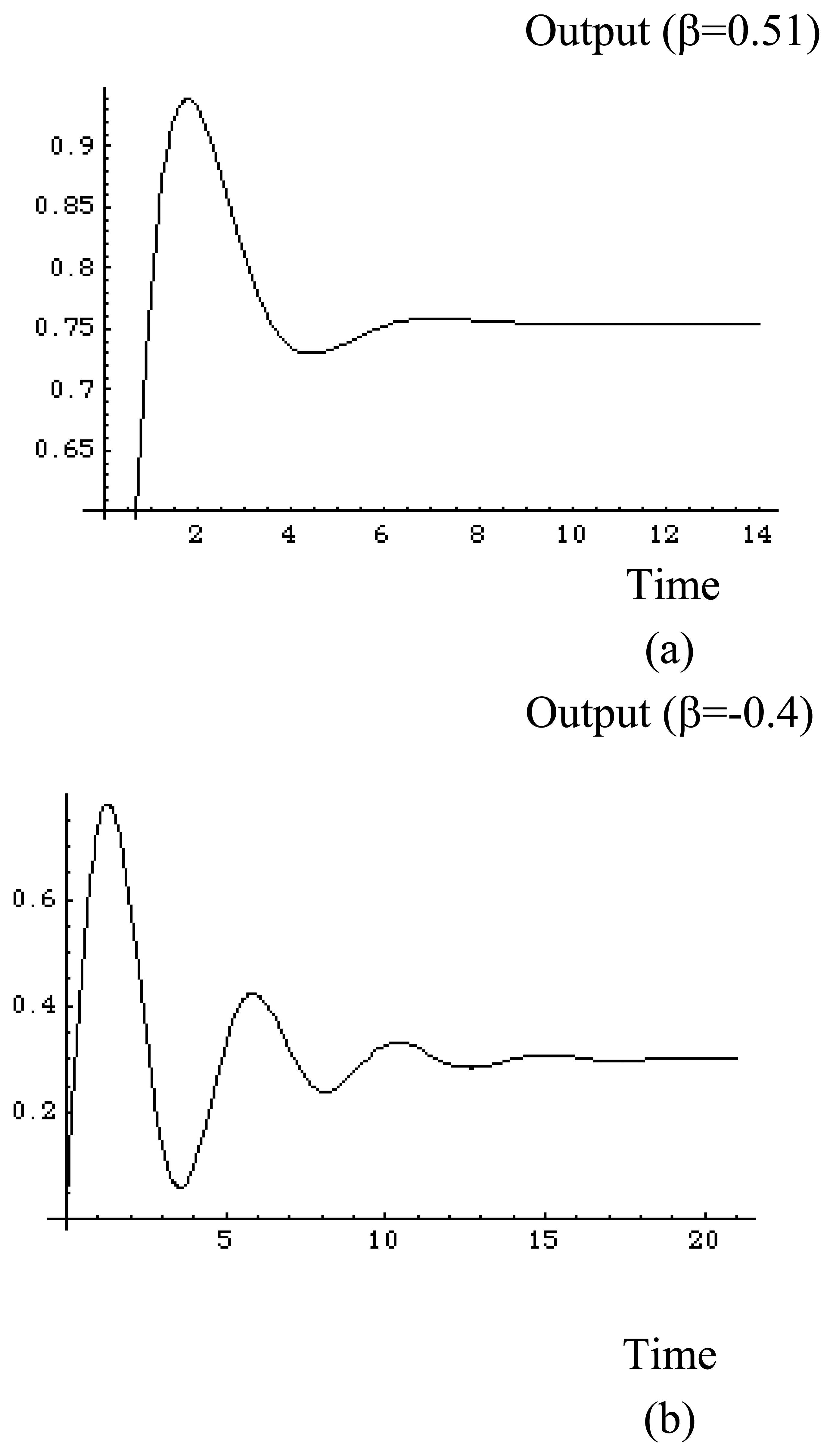
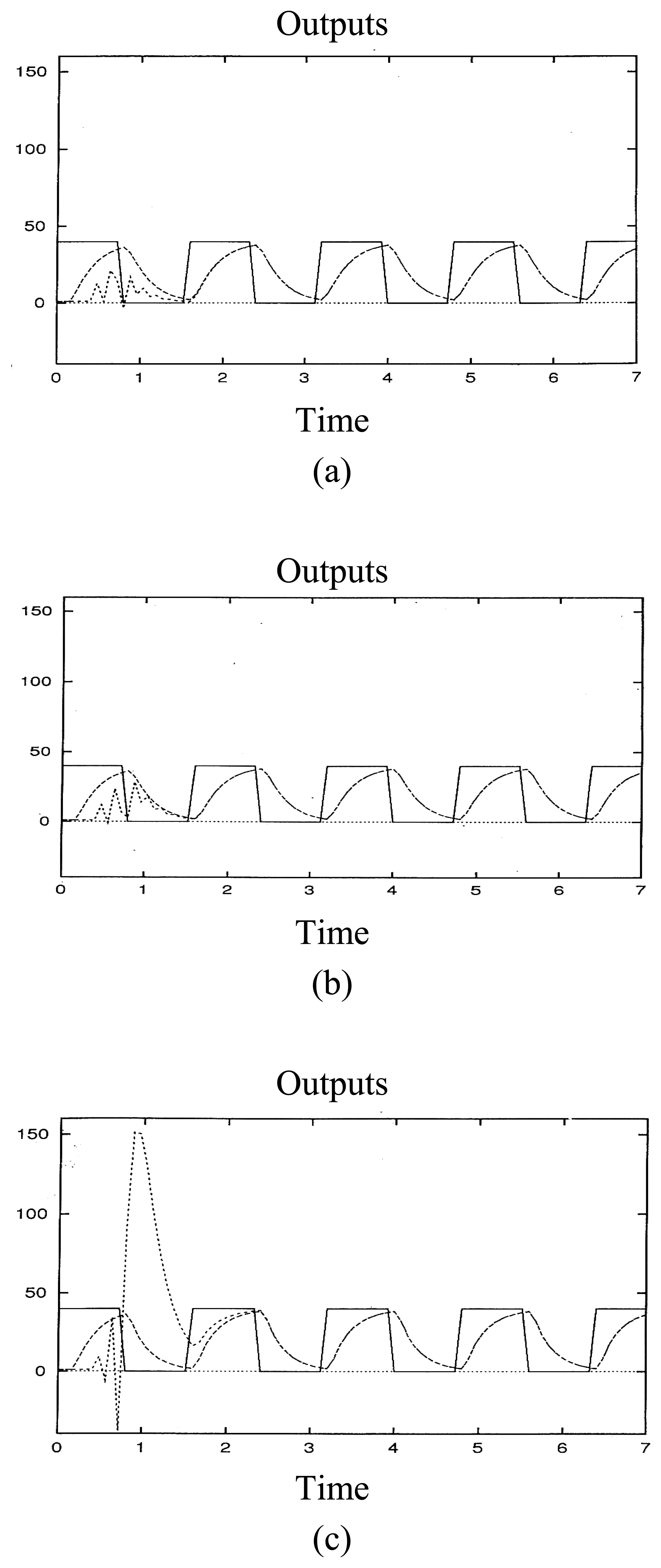
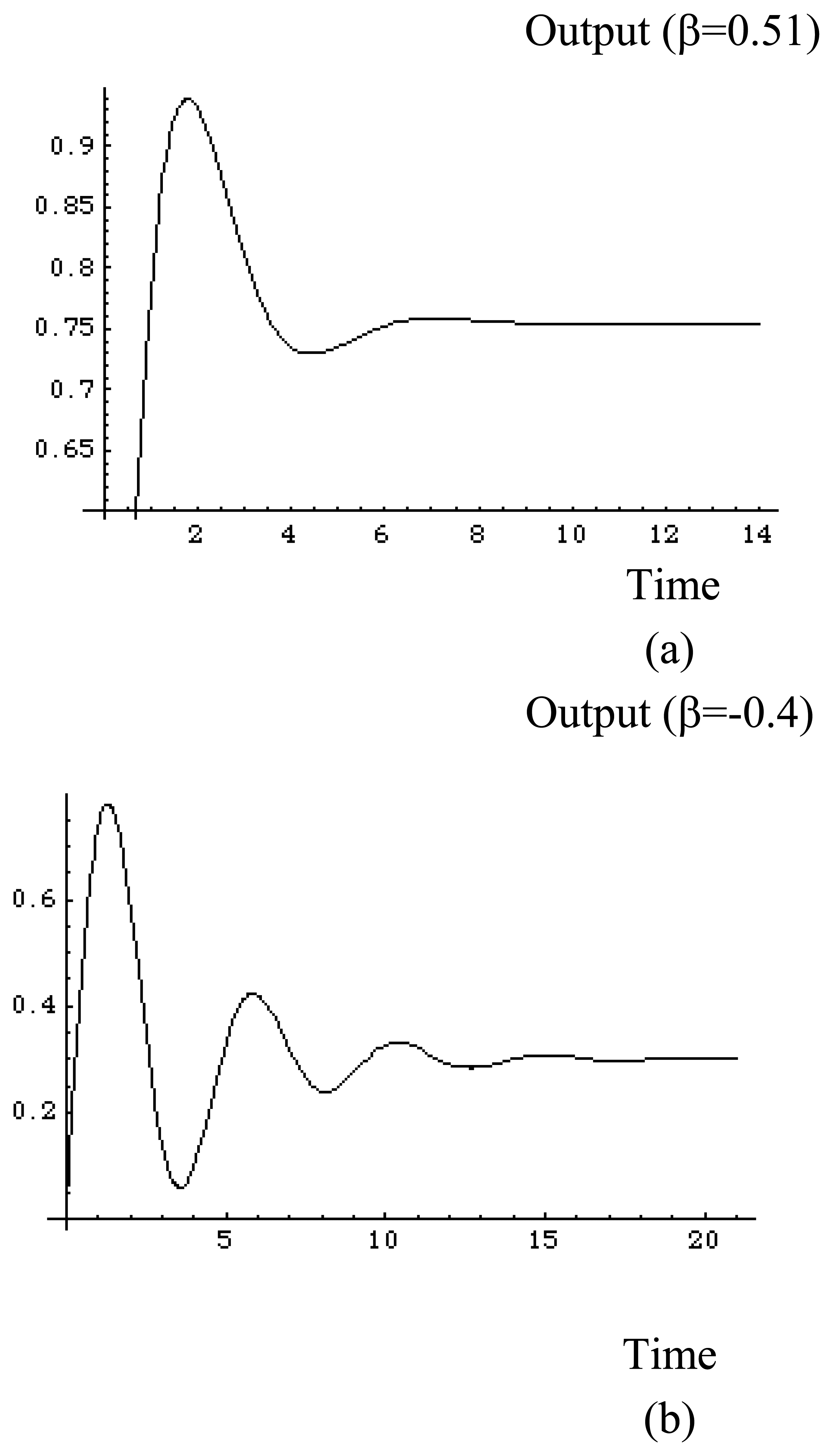
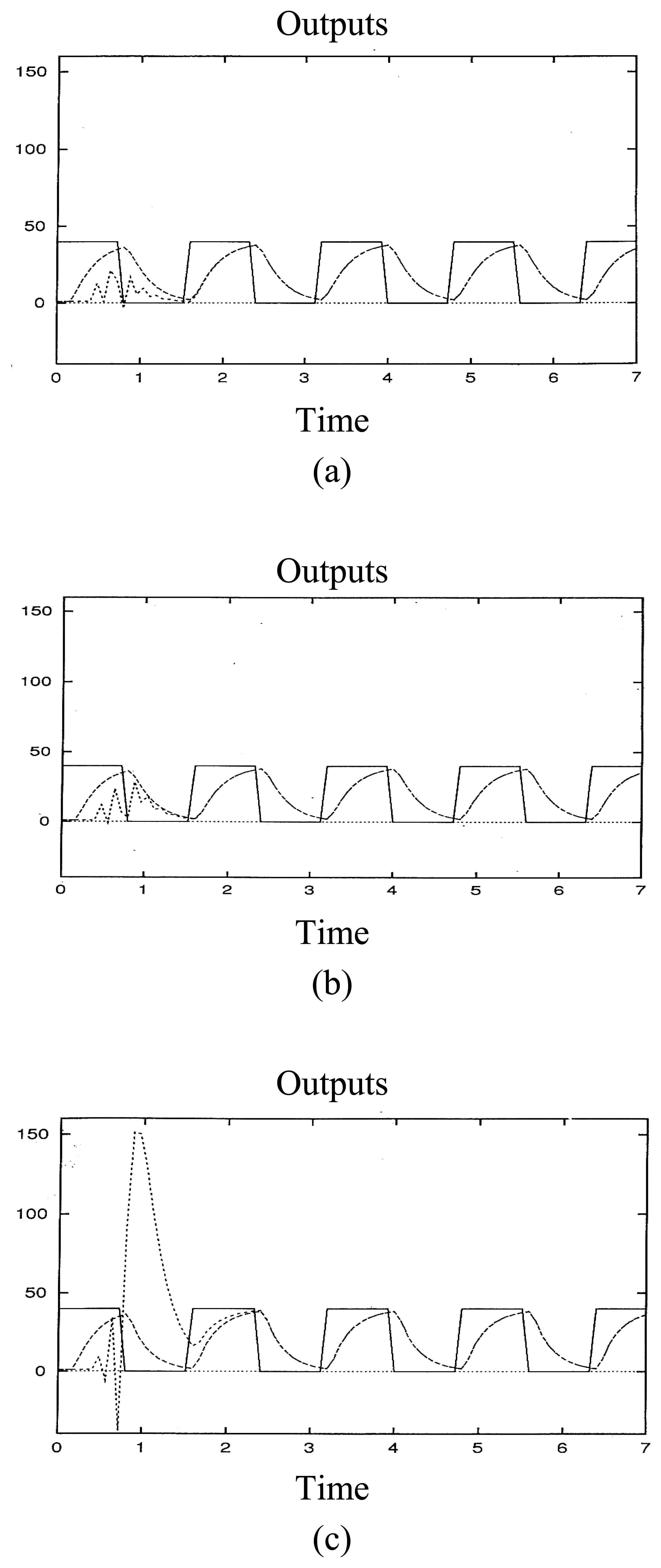
3.1. Example 1
3.2. Example 2
Acknowledgments
References and Notes
- De la Sen, M. A method for general design of positive real functions. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications 1998, 45(7), 764–769. [Google Scholar]
- De la Sen, M. Relationships between positive realness of continuous transfer functions and their digital counterparts. Electronics Letters 1999, 35(16), 1298–1299. [Google Scholar]
- Liang, S.; Ishitobi, M.; Zhu, Q. Improvement of stability of zeros in discrete multivariable systems using fractional-order-hold. International Journal of Control 2003, 76(17), 1699–1711. [Google Scholar]
- Liang, S.; Ishitobi, M. The stability properties of the zeros of sampled models for time-delay systems in fractional order-hold case. Dynamics of Continuous, Discrete and Impulsive Systems – Series B- Applications & Algorithms 2004, 11(3), 299–312. [Google Scholar]
- Miskowicz, M. Asymptotic effectiveness of the event-based sampling according to the integral criterion. Sensors 2007, 7(1), 16–37. [Google Scholar]
- Suh, Y.S. Send-on-delta sensor data transmission with a linear predictor. Sensors 2007, 7(4), 537–547. [Google Scholar]
- Suh, Y.S.; Nguyen, V.H.; Ro, Y.S. Modified Kalman filter for networked monitoring systems employing a send-on-delta method. Automatica 2007, 43(2), 332–338. [Google Scholar]
- Burge, S.R.; Hoffman, D.A.; Hartman, M.J.; Venedam, R.J. Automated ground-water sampling and analysis of hexavalent chromium using a “universal” sampling/analytical system. Sensors 2005, 5, 38–50. [Google Scholar]
- De la Sen, M. On the properties of reachability, observability, controllability and constructibility of discrete-time positive time-invariant linear systems with aperiodic choice of the sampling instants; Discrete Dynamics in Nature and Society, 2007; Article ID 84913; pp. 1–23. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2007 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
De la Sen, M. About Optimal Fractional Hold Circuits for Inter- sample Output Reconstruction in Sampled-data Systems. Sensors 2007, 7, 3146-3155. https://doi.org/10.3390/s7123146
De la Sen M. About Optimal Fractional Hold Circuits for Inter- sample Output Reconstruction in Sampled-data Systems. Sensors. 2007; 7(12):3146-3155. https://doi.org/10.3390/s7123146
Chicago/Turabian StyleDe la Sen, Manuel. 2007. "About Optimal Fractional Hold Circuits for Inter- sample Output Reconstruction in Sampled-data Systems" Sensors 7, no. 12: 3146-3155. https://doi.org/10.3390/s7123146
APA StyleDe la Sen, M. (2007). About Optimal Fractional Hold Circuits for Inter- sample Output Reconstruction in Sampled-data Systems. Sensors, 7(12), 3146-3155. https://doi.org/10.3390/s7123146