


Length Estimation of Pneumatic Artificial Muscle with Optical Fiber Sensor Using Machine Learning


Abstract
1. Introduction
2. Materials
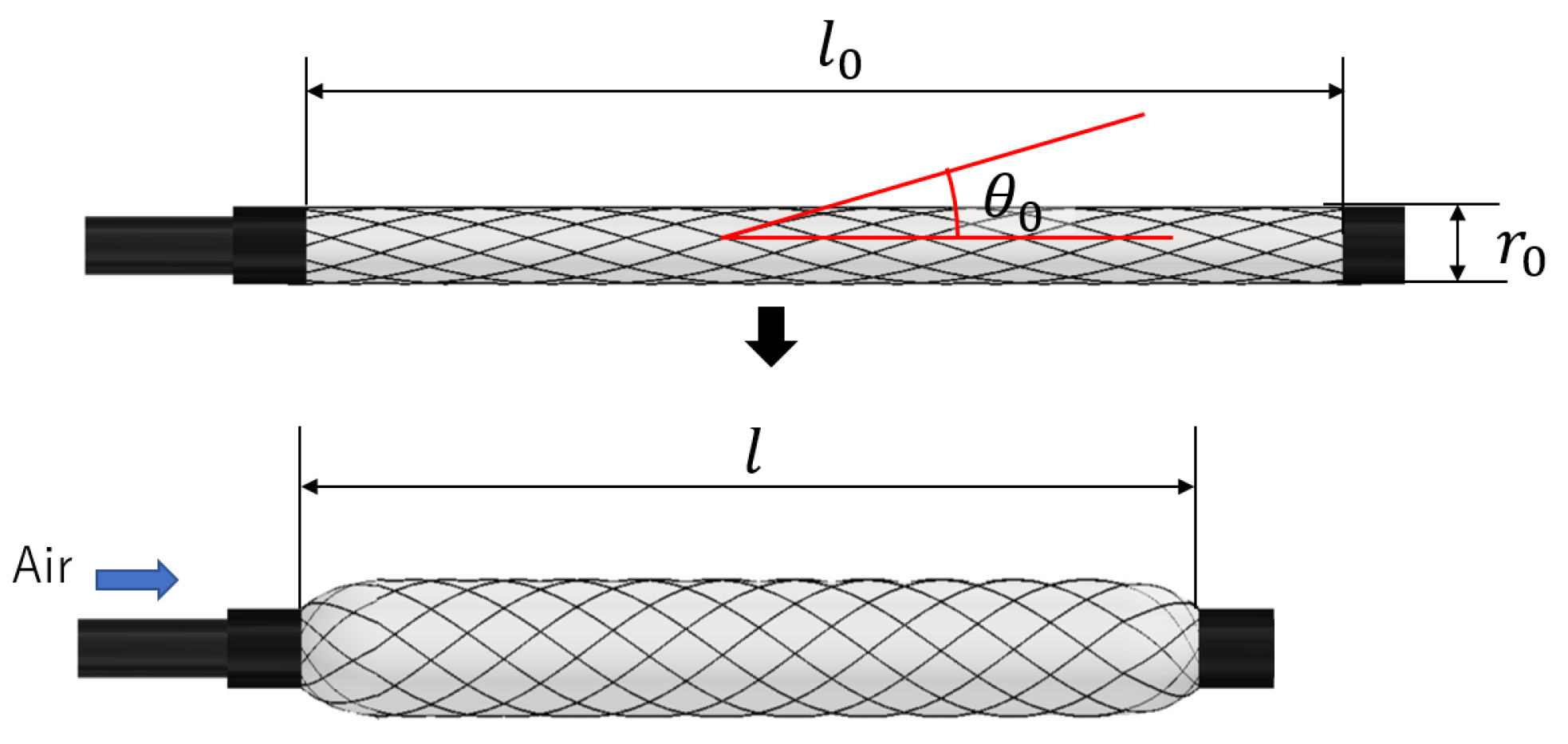
2.1. McKibben Artificial Muscle
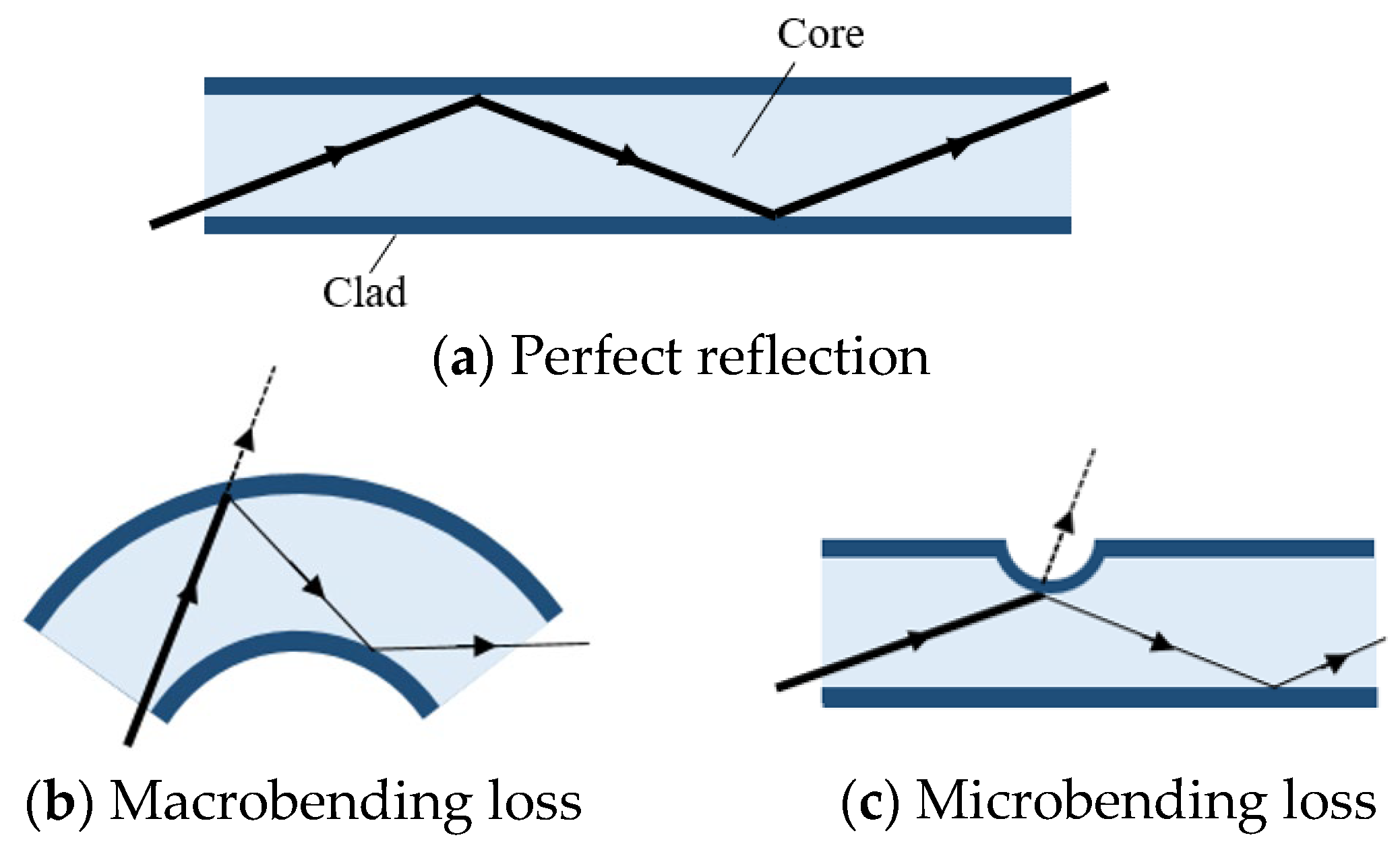
2.2. Optical Fiber
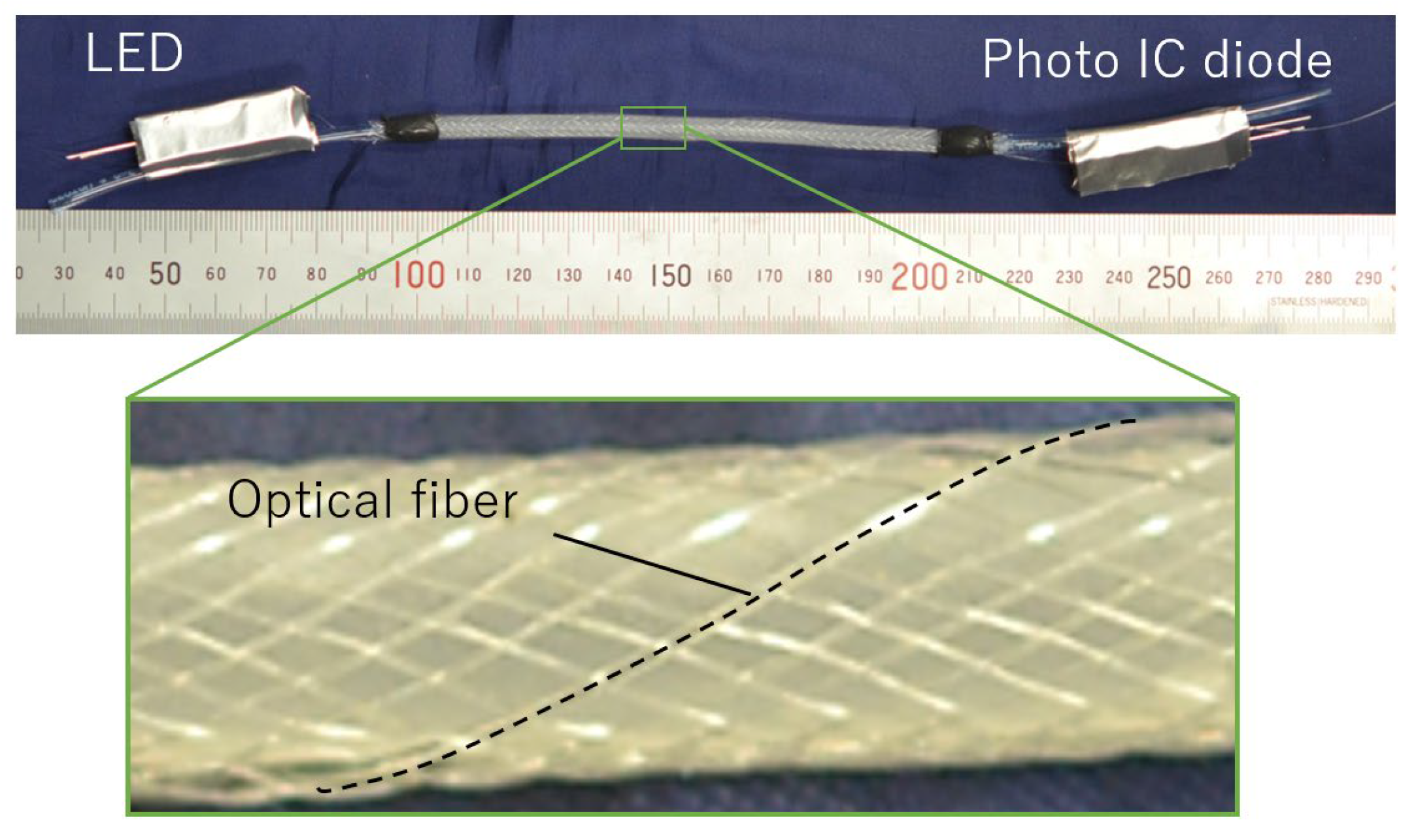
2.3. Configuration of Smart Artificial Muscle
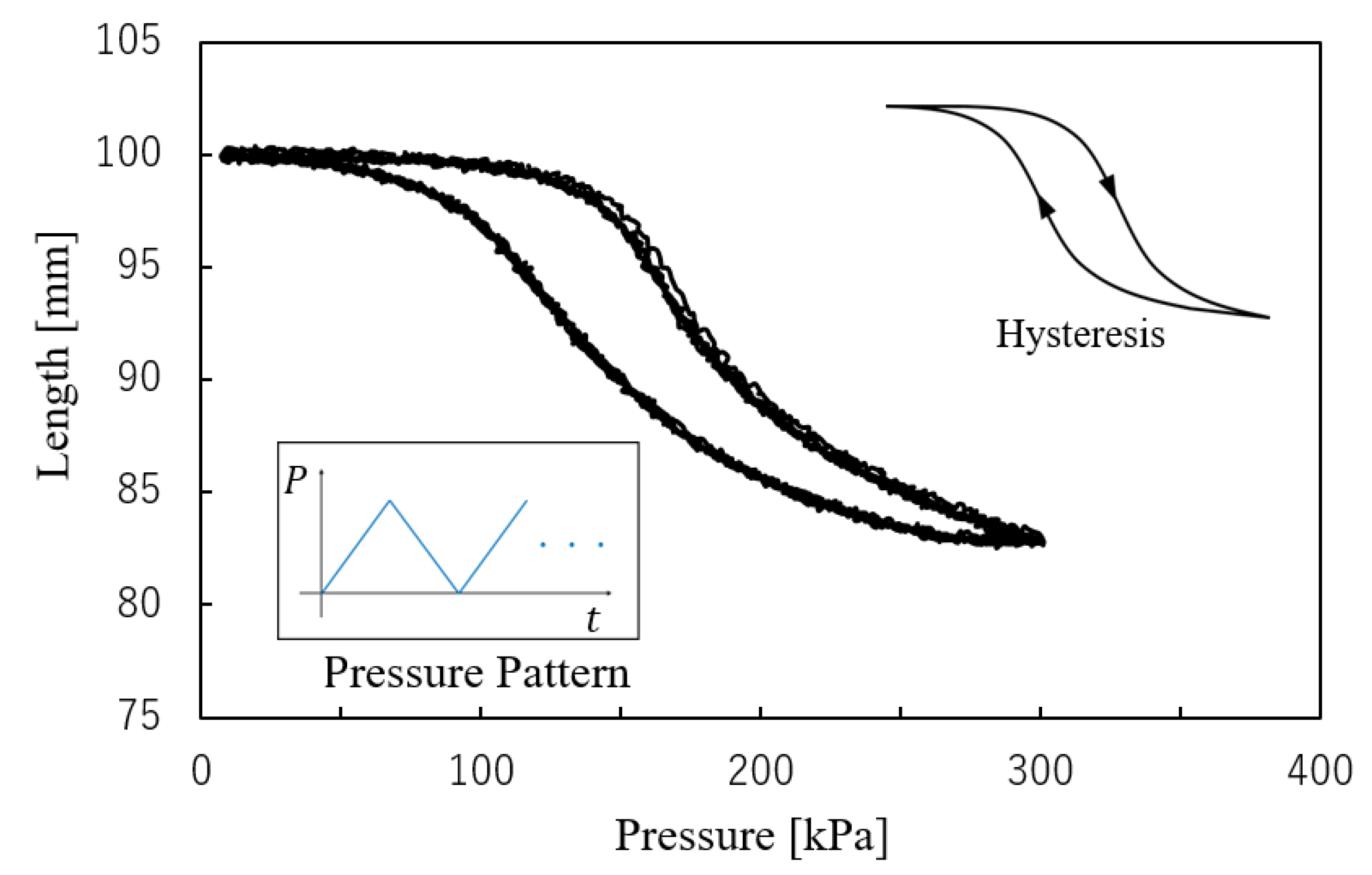
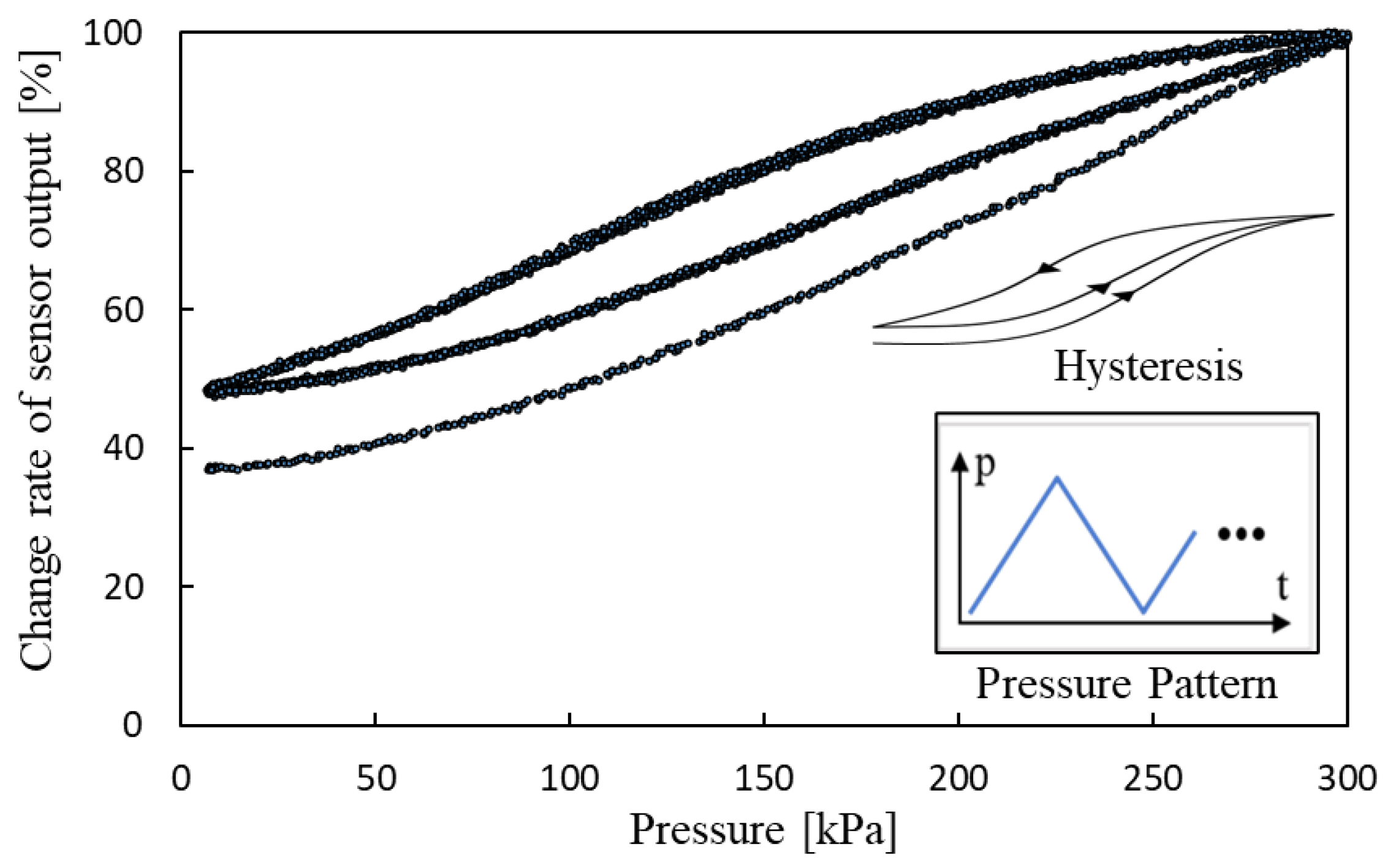
2.4. Fundamental Characteristics of Smart Artificial Muscle
2.5. Structure of Machine Learning
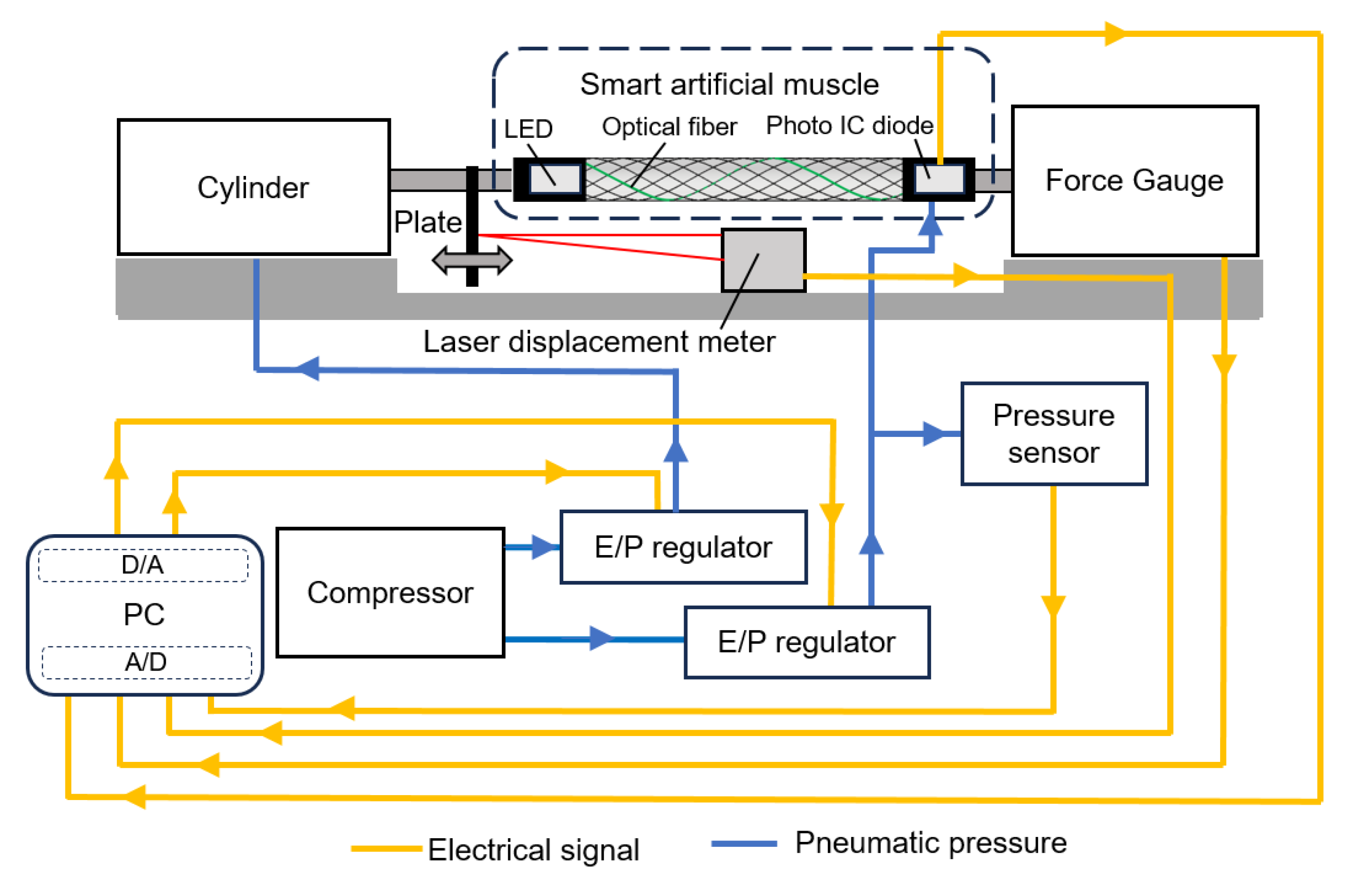
2.6. Experimental Setup
3. Results and Discussion
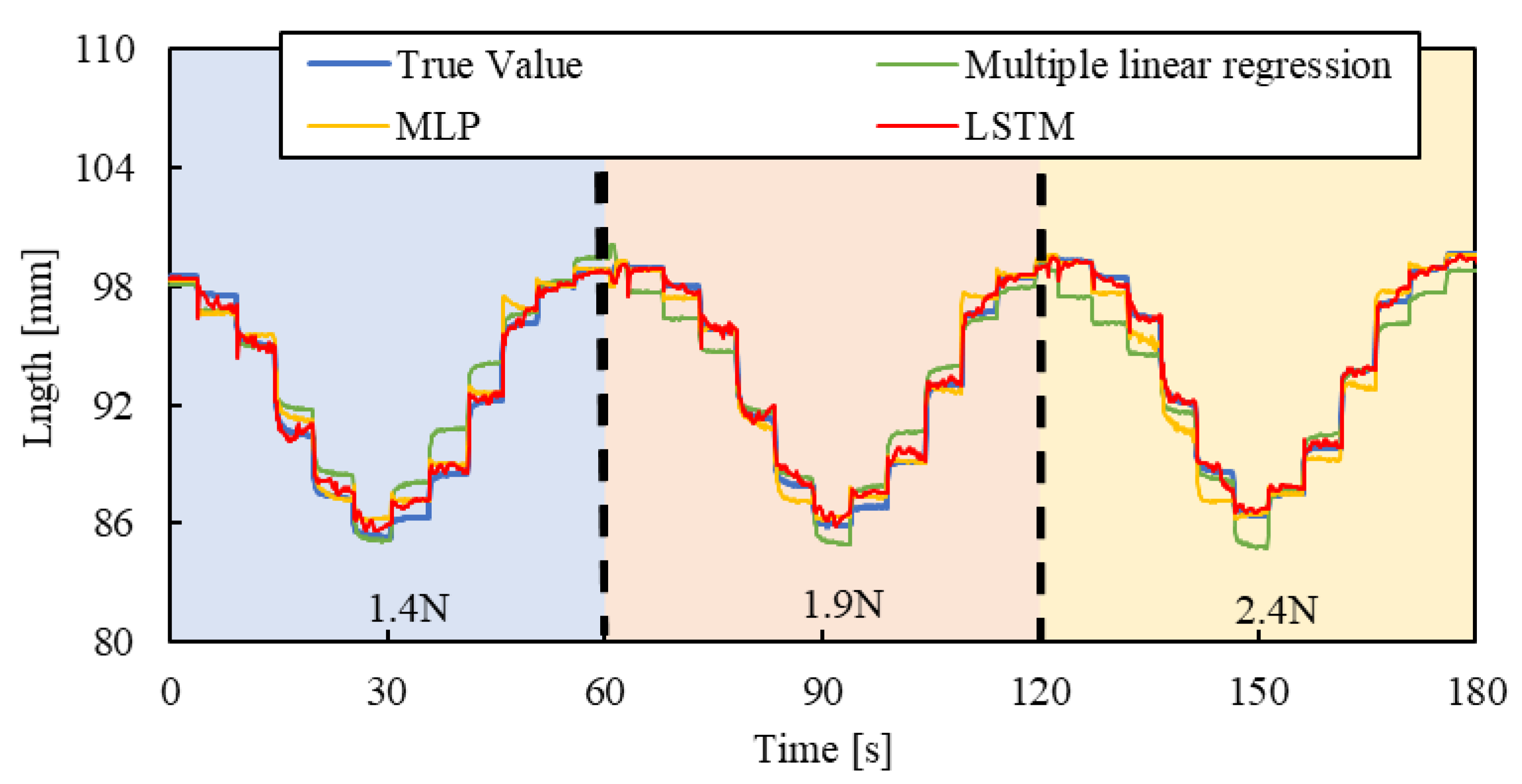
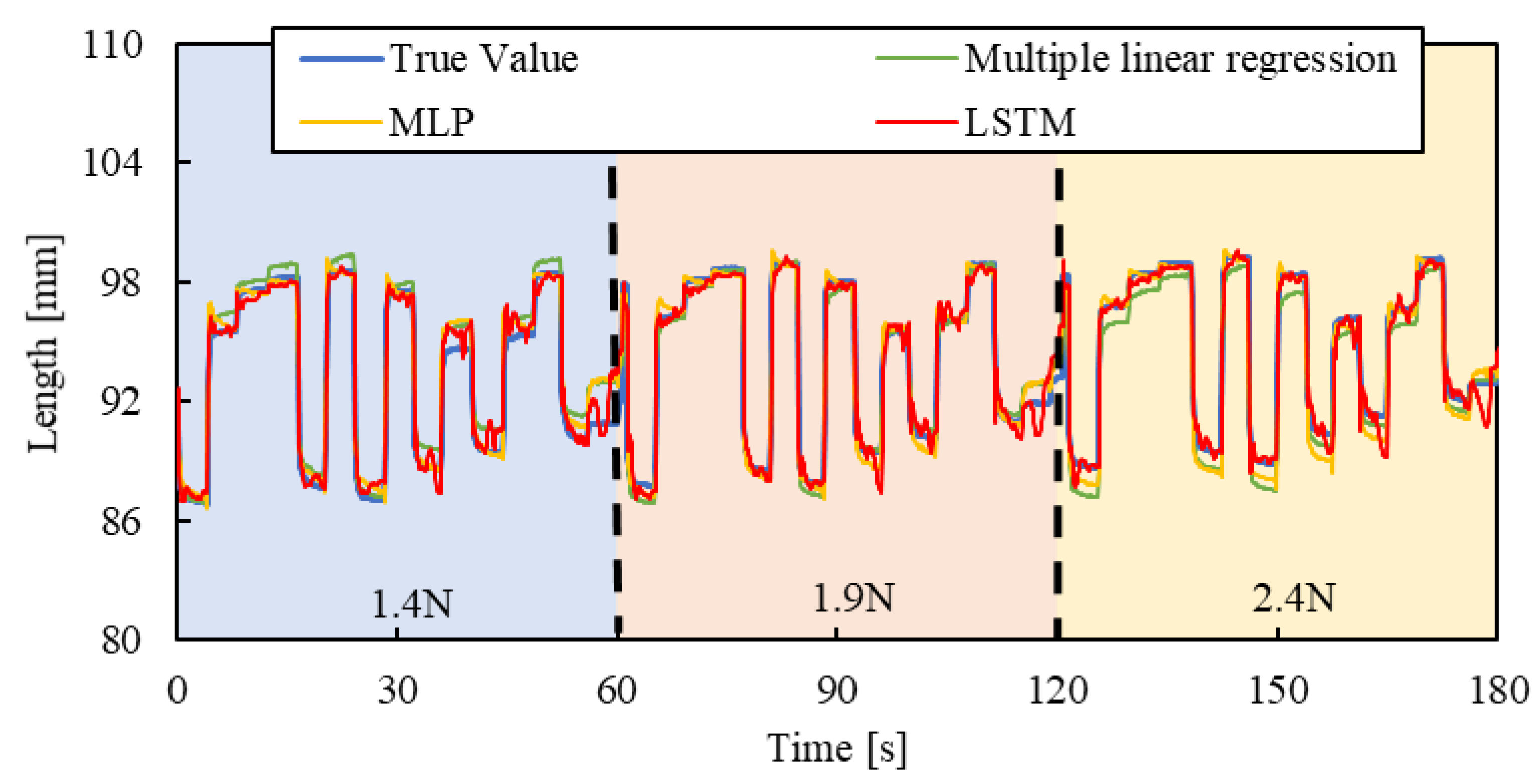
3.1. Test Results
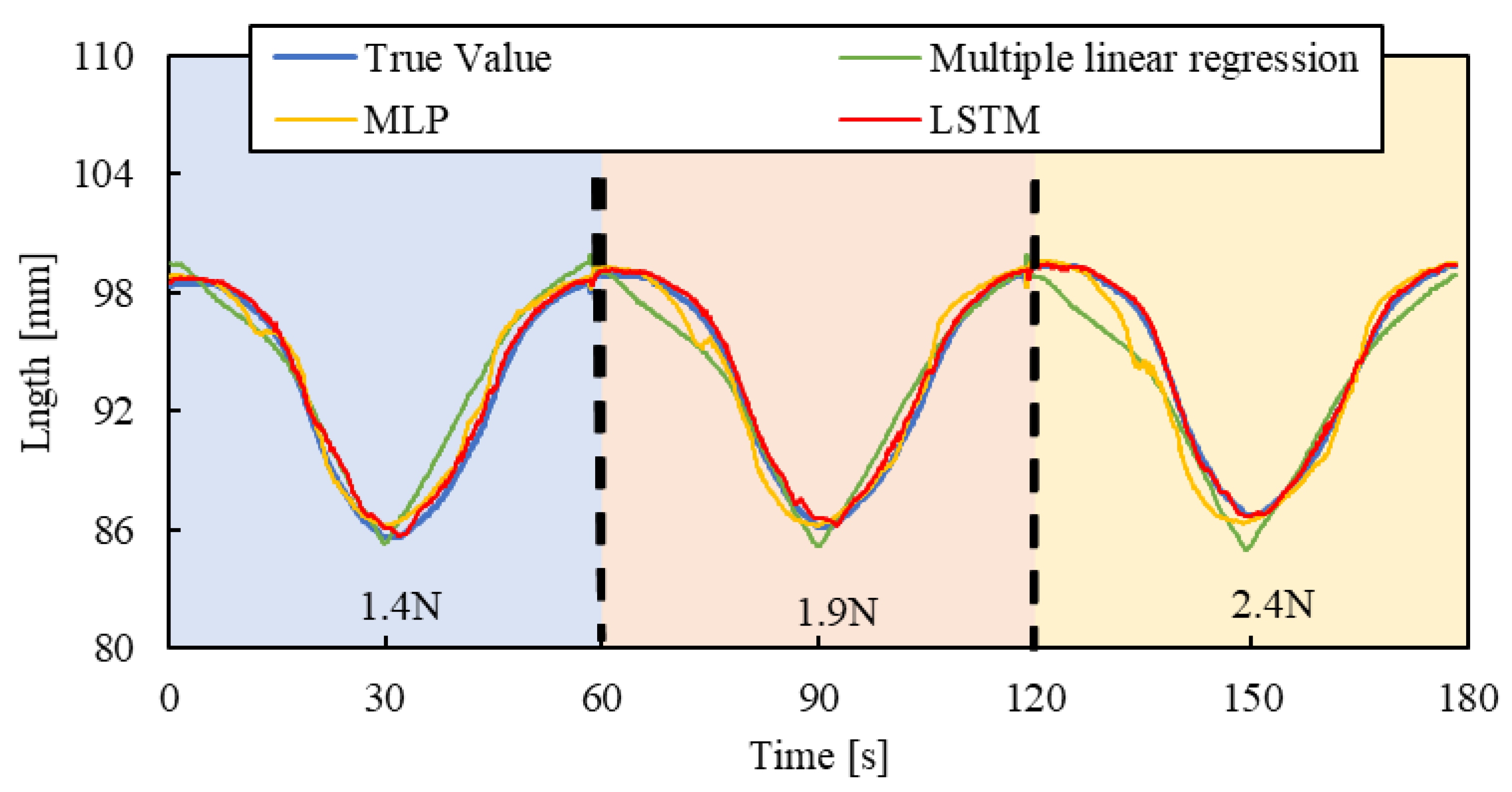
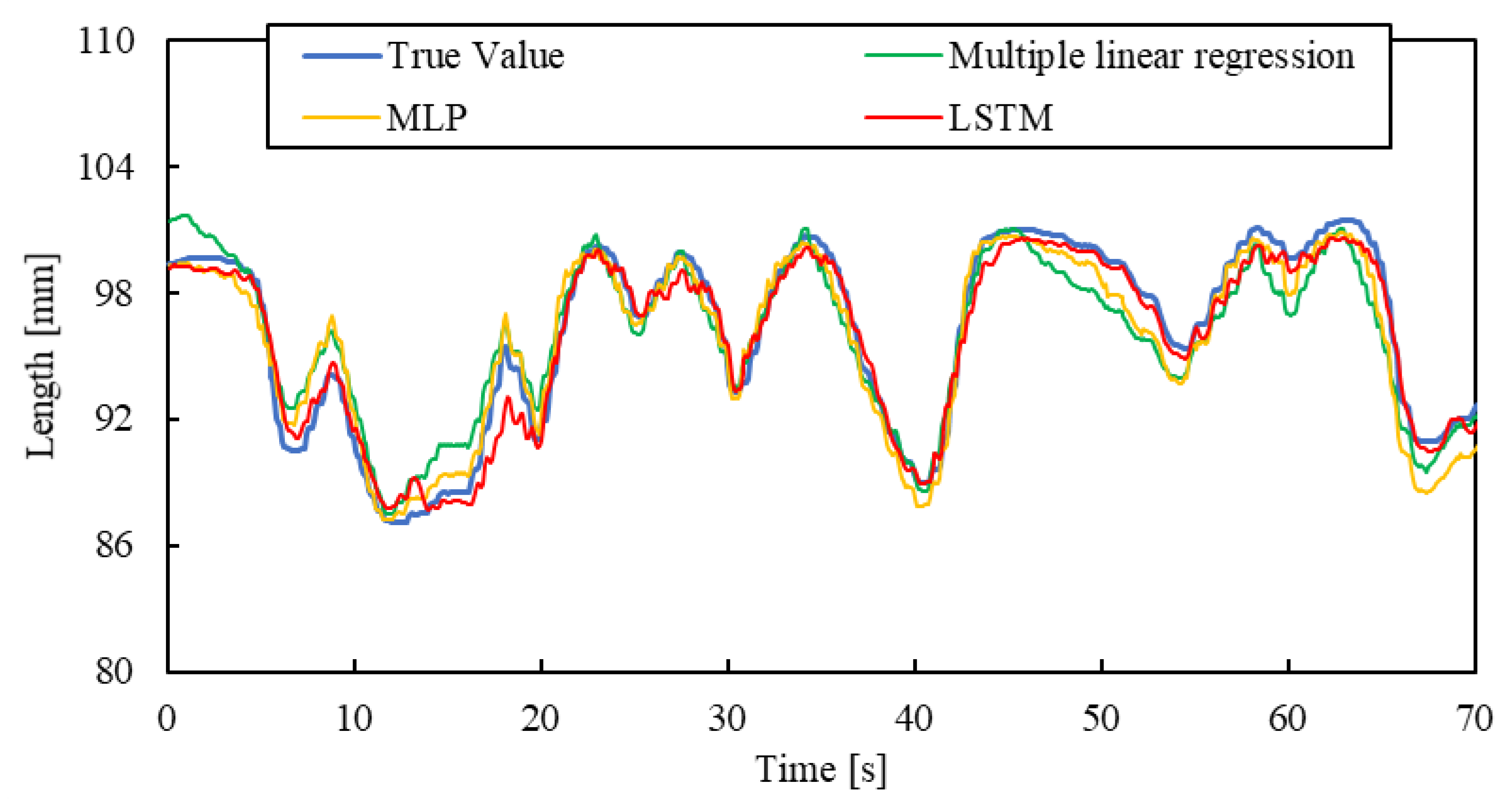
3.2. Validation of Generality
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gaylord, R.H. Fluid Actuated Motor System and Stroking Device. US Patent 2-238-058, 22 July 1958. [Google Scholar]
- Schulte, H.F. The Characteristics of the McKibben Artificial Muscle. In The Application of External Power in Prosthetics and Orthotics; National Academy of Sciences: Washington, DC, USA; National Research Council: Washington, DC, USA, 1961; pp. 94–115. [Google Scholar]
- DARWING Power Assist Glove EX. Available online: http://daiyak.co.jp/darwing/index.html (accessed on 29 August 2024).
- Muscle Suit Every. Available online: https://innophys.net/musclesuit (accessed on 29 August 2024).
- Hassan, T.; Cianchetti, M.; Moatamedi, M.; Mazzolai, B.; Laschi, C.; Dario, P. Finite-Element Modeling and Design of a Pneumatic Braided Muscle Actuator with Multifunctional Capabilities. IEEE/ASME Trans. Mechatron. 2019, 24, 109–119. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, Y.; Zhang, T.; Liu, J. Reconfigurable Exomuscle System Employing Parameter Tuning to Assist Hip Flexion or Ankle Plantarflexion. IEEE/ASME Trans. Mechatron. 2025, 1–12. [Google Scholar] [CrossRef]
- Zhao, H.; Jalving, J.; Huang, R.; Knepper, R.; Ruina, A.; Shepherd, R. A Helping Hand: Soft Orthosis with Integrated Optical Strain Sensors and EMG Control. IEEE Robot. Autom. Mag. 2016, 23, 55–64. [Google Scholar]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R. Optoelectronically Innervated Soft Prosthetic Hand via Stretchable Optical Waveguides. Sci. Robot. 2016, 1, 7529. [Google Scholar]
- Tian, W.; Wakimoto, S.; Kanda, T.; Yamaguchi, D. Displacement Sensing of an Active String Actuator Using a Schermer Sensor. Sensors 2022, 22, 3232. [Google Scholar] [PubMed]
- Masuya, K. Low-Cost Coil-Shaped Optical Fiber Displacement Sensor for a Twisted and Coiled Polymer Fiber Actuator Unit. IEEE Robot. Autom. Lett. 2020, 5, 6497–6503. [Google Scholar] [CrossRef]
- Sareh, S.; Noh, Y.; Li, M.; Ranzani, T.; Liu, H.; Althoefer, K. Macrobend Optical Sensing for Pose Measurement in Soft Robot Arms. Smart Mater. Struct. 2015, 24, 125024. [Google Scholar]
- Tian, W.; Wakimoto, S.; Yamaguchi, D.; Kanda, T. Development of a Smart Artificial Muscle Using Optical Fibres. Smart Mater. Struct. 2024, 33, 055047. [Google Scholar] [CrossRef]
- George Thuruthel, T.; Gardner, P.; Iida, F. Closing the Control Loop with Time-Variant Embedded Soft Sensors and Recurrent Neural Networks. Soft Robot. 2022, 9, 1167–1176. [Google Scholar] [CrossRef] [PubMed]
- Elsamanty, M.; Hassaan, M.A.; Orban, M.; Guo, K.; Yang, H.; Abdrabbo, S.; Selmy, M. Soft Pneumatic Muscles: Revolutionizing Human Assistive Devices with Geometric Design and Intelligent Control. Micromachines 2023, 14, 1431. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Kwon, J.; Han, S.; Park, Y.-L.; Jo, S. Deep Full-Body Motion Network for a Soft Wearable Motion Sensing Suit. IEEE/ASME Trans. Mechatron. 2019, 24, 56–66. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft Robot Perception Using Embedded Soft Sensors and Recurrent Neural Networks. Sci. Robot. 2019, 4, eaav1488. [Google Scholar] [CrossRef] [PubMed]
- Sakurai, R.; Nishida, M.; Sakurai, H.; Wakao, Y.; Akashi, N.; Kuniyoshi, Y.; Minami, Y.; Nakajima, K. Emulating a Sensor Using Soft Material Dynamics: A Reservoir Computing Approach to Pneumatic Artificial Muscle. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics, New Haven, CT, USA, 15 May–15 July 2020; pp. 710–717. [Google Scholar]
- Shu, J.; Wang, J.; Su, Y.; Liu, H.; Li, Z.; Tong, R.K.-Y. An End-to-End Posture Perception Method for Soft Bending Actuators Based on Kirigami-Inspired Piezoresistive Sensors. In Proceedings of the 2022 IEEE-EMBS International Conference on Wearable and Implantable Body Sensor Networks, Ioannina, Greece, 27 September 2022; pp. 1–5. [Google Scholar]
- Xie, Q.; Wang, T.; Zhu, S. Simplified Dynamical Model and Experimental Verification of an Underwater Hydraulic Soft Robotic Arm. Smart Mater. Struct. 2022, 31, 075011. [Google Scholar] [CrossRef]
- Luong, T.; Kim, K.; Seo, S.; Jeon, J.; Park, C.; Doh, M.; Koo, J.C.; Choi, H.R.; Moon, H. Long Short Term Memory Model Based Position-Stiffness Control of Antagonistically Driven Twisted-Coiled Polymer Actuators Using Model Predictive Control. IEEE Robot. Autom. Lett. 2021, 6, 4141–4148. [Google Scholar] [CrossRef]
- Schermer, R.T.; Cole, J.H. Improved Bend Loss Formula Verified for Optical Fiber by Simulation and Experiment. IEEE J. Quantum Electron. 2007, 43, 899–909. [Google Scholar] [CrossRef]
- Teeple, C.B.; Becker, K.P.; Wood, R.J. Soft Curvature and Contact Force Sensors for Deep-Sea Grasping via Soft Optical Waveguides. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1621–1627. [Google Scholar]
- Ashfaq, A.; Chen, Y.; Yao, K.; Sun, G.; Yu, J. Microbending Loss Caused by Stress in Optical Fiber Composite Low Voltage Cable. In Proceedings of the 2018 12th International Conference on the Properties and Applications of Dielectric Materials, Xi’an, China, 20–24 May 2018; pp. 483–486. [Google Scholar]
- Van Houdt, G.; Mosquera, C.; Nápoles, G. A Review on the Long Short-Term Memory Model. Artif. Intell. Rev. 2020, 53, 5929–5955. [Google Scholar] [CrossRef]
- Bjorck, N.; Gomes, C.P.; Selman, B.; Weinberger, K.Q. Understanding Batch Normalization. In Proceedings of the 32nd Conference on Neural Information Processing Systems, Montréal, QC, Canada, 3–8 December 2018. [Google Scholar]
- Santurkar, S.; Tsipras, D.; Ilyas, A.; Ma, A. How Does Batch Normalization Help Optimization? In Proceedings of the 32nd Conference on Neural Information Processing Systems, Montréal, QC, Canada, 3–8 December 2018. [Google Scholar]
- Ioffe, S. Batch Renormalization: Towards Reducing Minibatch Dependence in Batch-Normalized Models. In Proceedings of the 31st Conference on Neural Information Processing Systems (NeurIPS 2017), Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Bai, Y. RELU-Function and Derived Function Review. SHS Web Conf. 2022, 144, 02006. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Setting Value and Name |
|---|---|
| LSTM layers | Left block:1, Right block:2 (Figure 7) |
| LSTM layer neurons | 150 |
| Epochs | 1000 |
| Batch size | 256 |
| Data split rate | 0.9 |
| Lookback | 30 |
| Learning rate | 0.0001 |
| Optimization algorithm | Adam |
| Loss function | Mean squared Error |
| RMSE [mm] | ||||
|---|---|---|---|---|
| Model | Step | Triangle Wave | Random | |
| LSTM | 0.43 | 0.41 | 0.83 | |
| MLP | 0.82 | 1.04 | 0.93 | |
| Multiple linear regression | 1.29 | 1.43 | 1.04 | |
| RMSE [mm] | |||
|---|---|---|---|
| Machine Learning Data | Step | Triangle Wave | Random |
| Figure 10, Figure 11 and Figure 12 | 0.43 | 0.41 | 0.83 |
| Figure 13, Figure 14 and Figure 15 | 0.41 | 0.38 | 0.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, Y.; Wakimoto, S.; Tian, W.; Toda, Y.; Kanda, T.; Yamaguchi, D. Length Estimation of Pneumatic Artificial Muscle with Optical Fiber Sensor Using Machine Learning. Sensors 2025, 25, 2221. https://doi.org/10.3390/s25072221
Ni Y, Wakimoto S, Tian W, Toda Y, Kanda T, Yamaguchi D. Length Estimation of Pneumatic Artificial Muscle with Optical Fiber Sensor Using Machine Learning. Sensors. 2025; 25(7):2221. https://doi.org/10.3390/s25072221
Chicago/Turabian StyleNi, Yilei, Shuichi Wakimoto, Weihang Tian, Yuichiro Toda, Takefumi Kanda, and Daisuke Yamaguchi. 2025. "Length Estimation of Pneumatic Artificial Muscle with Optical Fiber Sensor Using Machine Learning" Sensors 25, no. 7: 2221. https://doi.org/10.3390/s25072221
APA StyleNi, Y., Wakimoto, S., Tian, W., Toda, Y., Kanda, T., & Yamaguchi, D. (2025). Length Estimation of Pneumatic Artificial Muscle with Optical Fiber Sensor Using Machine Learning. Sensors, 25(7), 2221. https://doi.org/10.3390/s25072221