
Vehicle Trajectory Reconstruction Method for Urban Arterial Roads Based on Multi-Source Data Fusion



Abstract
1. Introduction
2. Literature Review
2.1. Fixed Sensor Data
2.2. Mobile Sensor Data
2.3. Connected and Automated Vehicle Data
2.4. Multi-Source Data
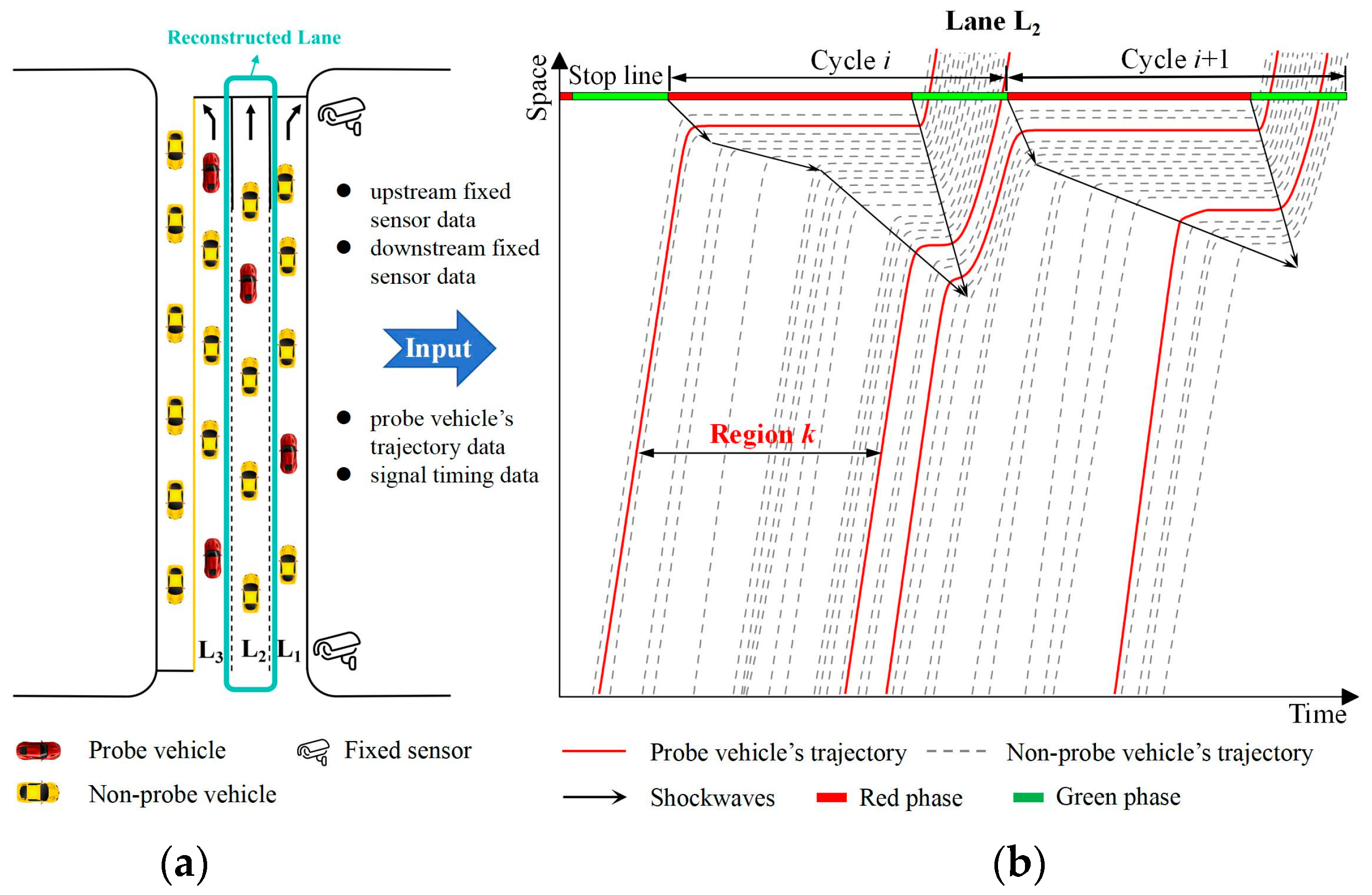
3. Problem Description
4. Methods
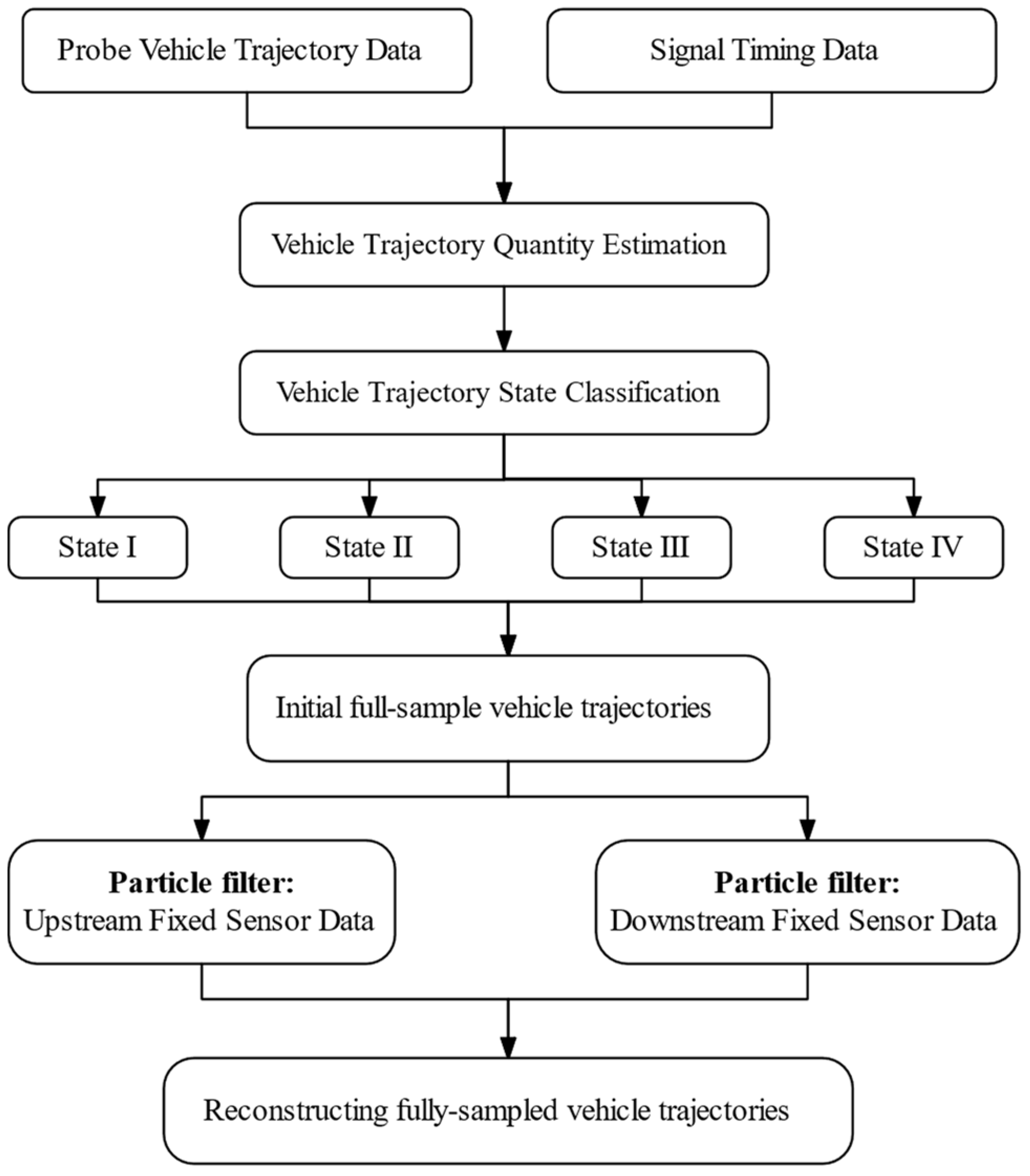
4.1. General Framework
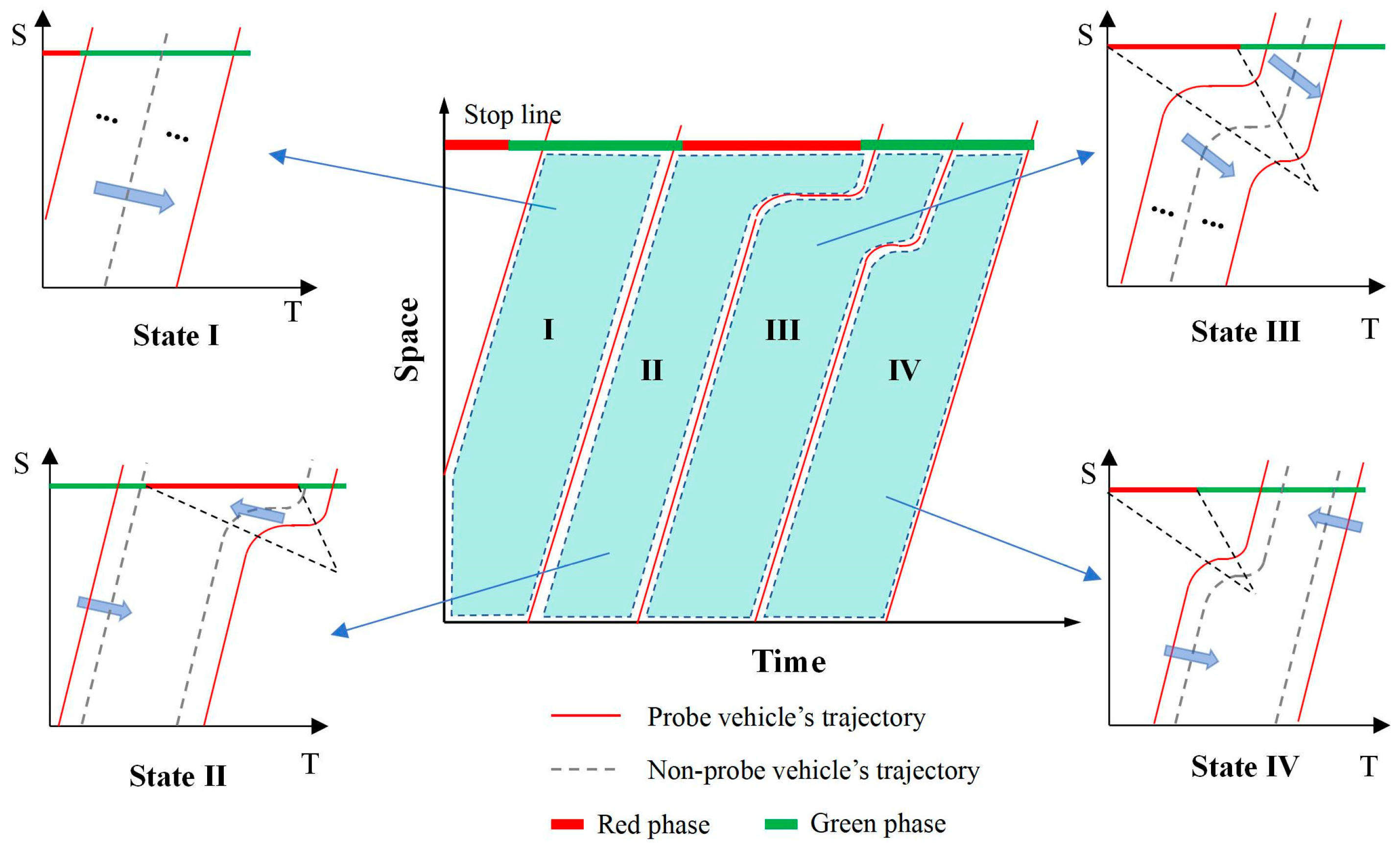
4.2. Vehicle Trajectory State Estimation Algorithm
4.3. Vehicle Trajectory Self-Optimization Algorithm
5. Case Study
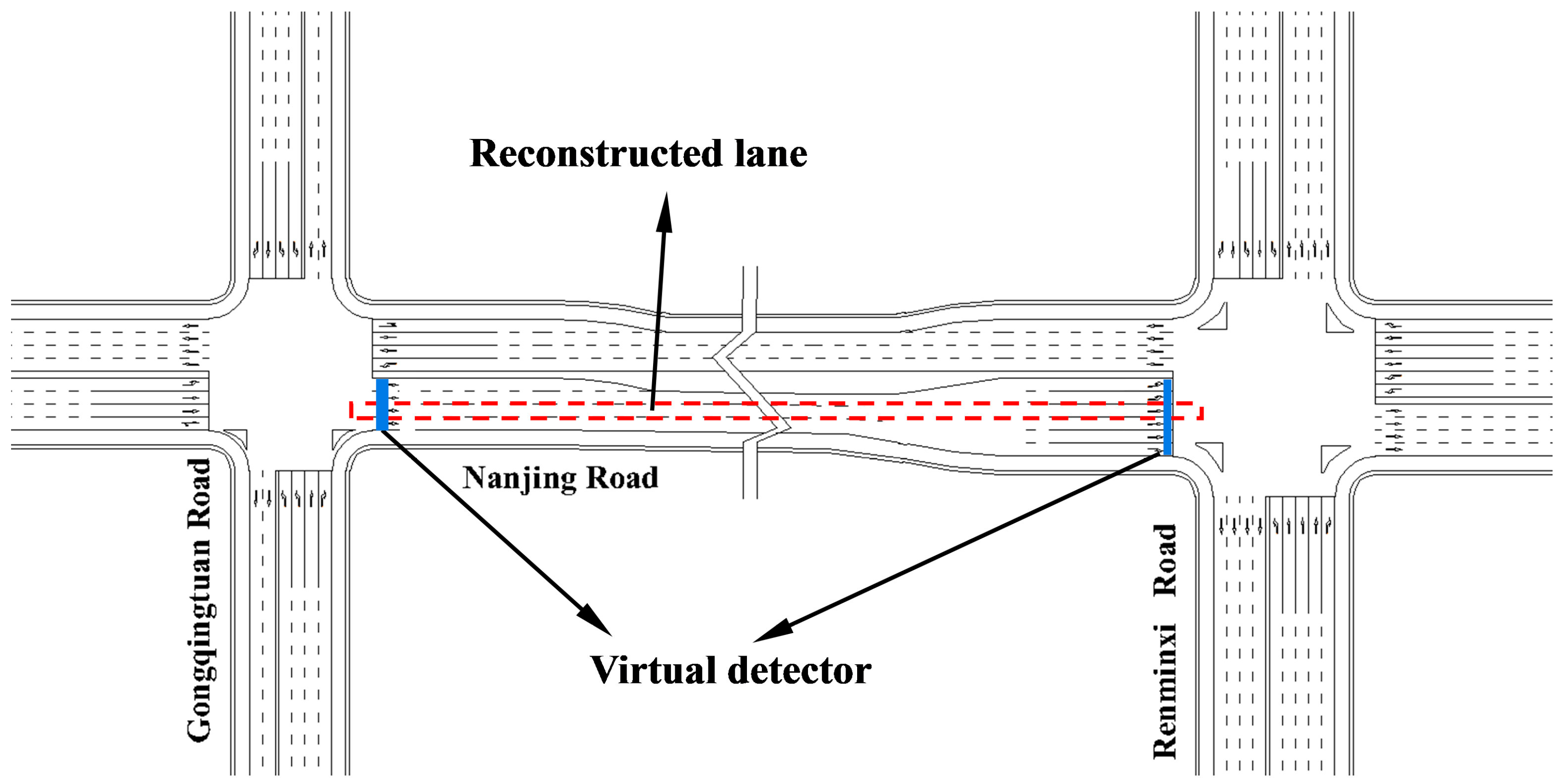
5.1. Scenario Description and Performance Indicators
5.2. Results and Discussion
5.2.1. General Results Analysis
5.2.2. Analysis of the Impact of Traffic Density
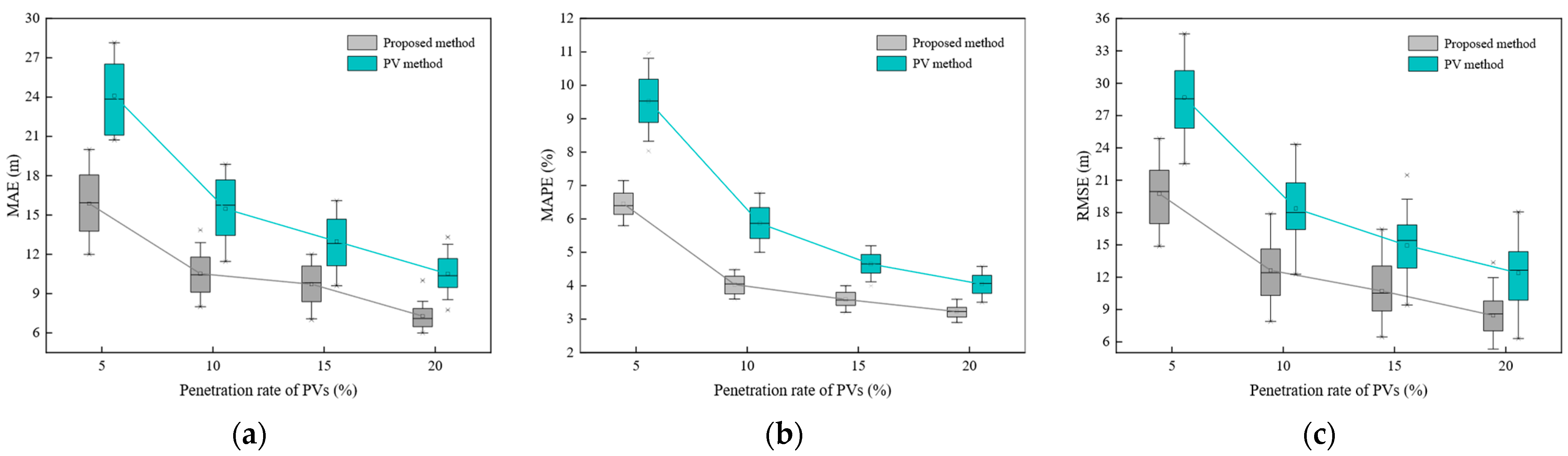
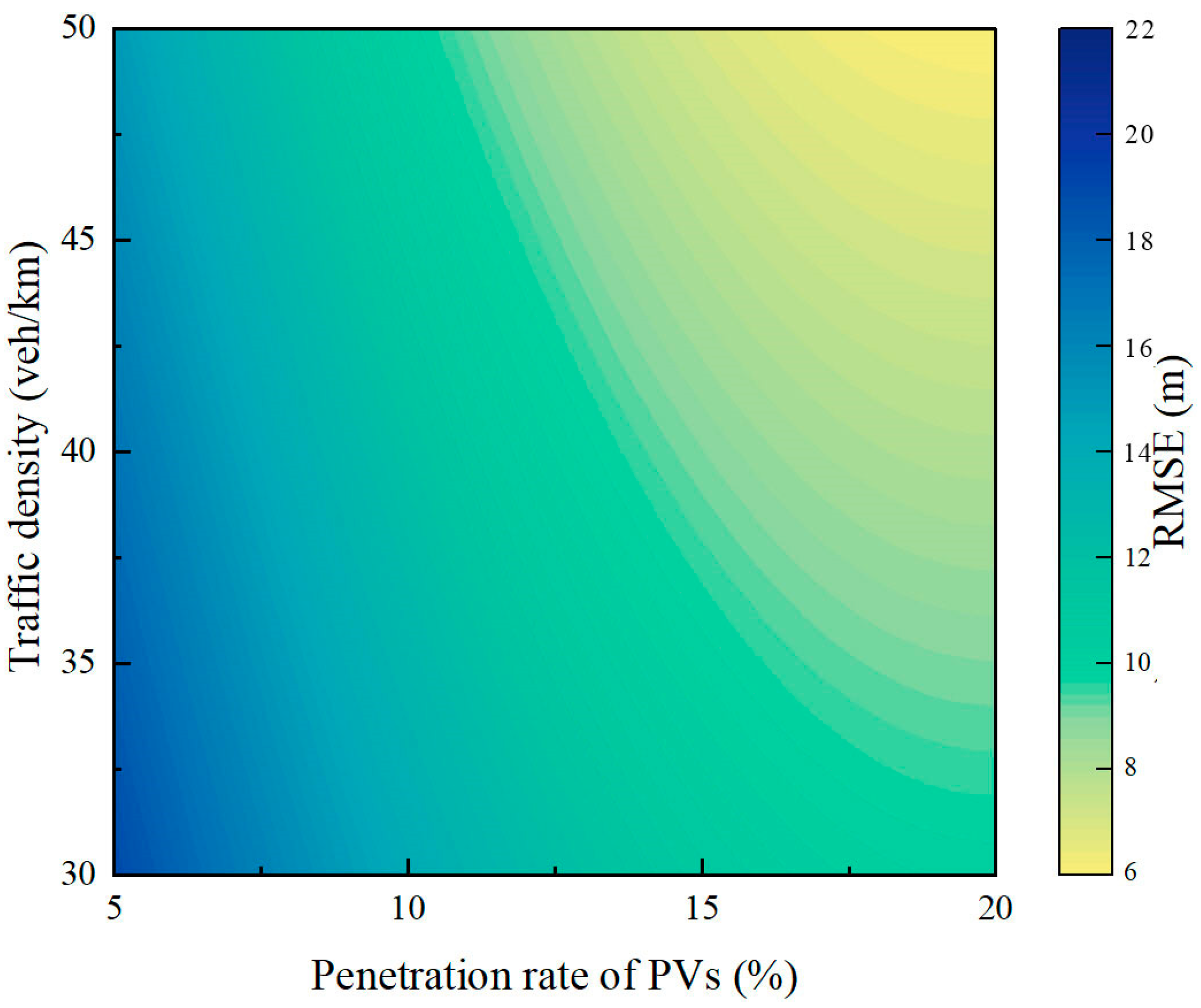
5.2.3. An Analysis of the Impact of the PV Penetration Rate
6. Conclusions
- This study designed four trajectory state estimation algorithms based on the driving states of neighboring PVs, effectively identifying the spatiotemporal interactions between probe and non-probe vehicles and achieving complete reconstruction of non-probe vehicle trajectories.
- A trajectory self-optimization algorithm based on particle filtering was proposed to minimize position errors. By integrating data from upstream and downstream fixed sensors with initial full-sample trajectories, the algorithm resolves data format incompatibility and randomness issues, improving the smoothness and reliability of trajectory reconstruction.
- Case studies showed that the proposed method improves trajectory accuracy by an average of 16.85% over the PV method. The MAPE is reduced by 2.28% under high-density conditions and by 3.37% under low penetration rates, demonstrating the method’s superior robustness and adaptability in complex traffic environments.
- A comprehensive evaluation revealed that reconstruction accuracy improves consistently with increasing traffic density and PV penetration rates. PV penetration has a greater impact on model accuracy than traffic density.
- This study mainly focused on the longitudinal interaction behavior of vehicles and did not fully consider the impact of lateral vehicle interactions in multi-lane environments.
- This study mainly relied on data from fixed sensors and probe vehicles, without fully utilizing the advantages of other potential data sources (such as drone monitoring and high-precision maps).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, J.; Fu, T.; Shangguan, Q. Wide-Area Vehicle Trajectory Data Based on Advanced Tracking and Trajectory Splicing Technologies: Potentials in Transportation Research. Accid. Anal. Prev. 2023, 186, 107044. [Google Scholar] [CrossRef] [PubMed]
- Guo, Q.; Li, L.; Ban, X.J. Urban Traffic Signal Control with Connected and Automated Vehicles: A Survey. Transp. Res. Part C Emerg. Technol. 2019, 101, 313–334. [Google Scholar] [CrossRef]
- Li, L.; Jiang, R.; He, Z.; Chen, X.M.; Zhou, X. Trajectory Data-Based Traffic Flow Studies: A Revisit. Transp. Res. Part C Emerg. Technol. 2020, 114, 225–240. [Google Scholar] [CrossRef]
- Barmpounakis, E.; Geroliminis, N. On the New Era of Urban Traffic Monitoring with Massive Drone Data: The pNEUMA Large-Scale Field Experiment. Transp. Res. Part C Emerg. Technol. 2020, 111, 50–71. [Google Scholar] [CrossRef]
- Mehran, B.; Kuwahara, M.; Naznin, F. Implementing Kinematic Wave Theory to Reconstruct Vehicle Trajectories from Fixed and Probe Sensor Data. Transp. Res. Part C Emerg. Technol. 2012, 20, 144–163. [Google Scholar] [CrossRef]
- Zheng, J.; Liu, H.X. Estimating Traffic Volumes for Signalized Intersections Using Connected Vehicle Data. Transp. Res. Part C Emerg. Technol. 2017, 79, 347–362. [Google Scholar] [CrossRef]
- Tan, C.; Liu, L.; Wu, H.; Cao, Y.; Tang, K. Fuzing License Plate Recognition Data and Vehicle Trajectory Data for Lane-Based Queue Length Estimation at Signalized Intersections. J. Intell. Transp. Syst. 2020, 24, 449–466. [Google Scholar] [CrossRef]
- Wei, L.; Wang, Y.; Chen, P. A Particle Filter-Based Approach for Vehicle Trajectory Reconstruction Using Sparse Probe Data. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2878–2890. [Google Scholar] [CrossRef]
- Gong, J.; Peng, X. Determining Traffic State Evolution Index on Urban Arterial Road. J. Transp. Syst. Eng. Inf. Technol. 2014, 14, 64–69. [Google Scholar] [CrossRef]
- Wang, Y.; Papageorgiou, M.; Messmer, A. Real-Time Freeway Traffic State Estimation Based on Extended Kalman Filter: Adaptive Capabilities and Real Data Testing. Transp. Res. Part A Policy Pract. 2008, 42, 1340–1358. [Google Scholar] [CrossRef]
- Yao, J.; Li, F.; Tang, K.; Jian, S. Sampled Trajectory Data-Driven Method of Cycle-Based Volume Estimation for Signalized Intersections by Hybridizing Shockwave Theory and Probability Distribution. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2615–2627. [Google Scholar] [CrossRef]
- Seo, T.; Kawasaki, Y.; Kusakabe, T.; Asakura, Y. Fundamental Diagram Estimation by Using Trajectories of Probe Vehicles. Transp. Res. Part B Methodol. 2019, 122, 40–56. [Google Scholar] [CrossRef]
- Yin, J.; Chen, P.; Tang, K.; Sun, J. Queue Intensity Adaptive Signal Control for Isolated Intersection Based on Vehicle Trajectory Data. J. Adv. Transp. 2021, 2021, 8838922. [Google Scholar] [CrossRef]
- Sun, Z.; Hao, P.; Ban, X.; Yang, D. Trajectory-Based Vehicle Energy/Emissions Estimation for Signalized Arterials Using Mobile Sensing Data. Transp. Res. Part D Transp. Environ. 2015, 34, 27–40. [Google Scholar] [CrossRef]
- Chen, X.; Yin, J.; Qin, G.; Tang, K.; Wang, Y.; Sun, J. Integrated Macro-Micro Modelling for Individual Vehicle Trajectory Reconstruction Using Fixed and Mobile Sensor Data. Transp. Res. Part C Emerg. Technol. 2022, 145, 103929. [Google Scholar] [CrossRef]
- Chen, P.; Wei, L.; Meng, F.; Zheng, N. Vehicle Trajectory Reconstruction for Signalized Intersections: A Hybrid Approach Integrating Kalman Filtering and Variational Theory. Transp. B Transp. Dyn. 2021, 9, 22–41. [Google Scholar] [CrossRef]
- Eskandarian, A.; Wu, C.; Sun, C. Research Advances and Challenges of Autonomous and Connected Ground Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 683–711. [Google Scholar] [CrossRef]
- Tang, K.; Tan, C.; Cao, Y.; Yao, J.; Sun, J. A Tensor Decomposition Method for Cycle-Based Traffic Volume Estimation Using Sampled Vehicle Trajectories. Transp. Res. Part C Emerg. Technol. 2020, 118, 102739. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, H.X.; Chen, P.; Yu, G.; Wang, Y. Cycle-Based End of Queue Estimation at Signalized Intersections Using Low-Penetration-Rate Vehicle Trajectories. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3257–3272. [Google Scholar] [CrossRef]
- Chen, P.; Zeng, W.; Chen, M.; Yu, G.; Wang, Y. Modeling Arterial Travel Time Distribution by Accounting for Link Correlations: A Copula-Based Approach. J. Intell. Transp. Syst. 2019, 23, 28–40. [Google Scholar] [CrossRef]
- Rao, W.; Wu, Y.-J.; Xia, J.; Ou, J.; Kluger, R. Origin-Destination Pattern Estimation Based on Trajectory Reconstruction Using Automatic License Plate Recognition Data. Transp. Res. Part C Emerg. Technol. 2018, 95, 29–46. [Google Scholar] [CrossRef]
- van Lint, J.W.C.; Hoogendoorn, S.P. A Robust and Efficient Method for Fusing Heterogeneous Data from Traffic Sensors on Freeways. Comput.-Aided Civ. Infrastruct. Eng. 2010, 25, 596–612. [Google Scholar] [CrossRef]
- Xie, X.; van Lint, H.; Verbraeck, A. A Generic Data Assimilation Framework for Vehicle Trajectory Reconstruction on Signalized Urban Arterials Using Particle Filters. Transp. Res. Part C Emerg. Technol. 2018, 92, 364–391. [Google Scholar] [CrossRef]
- Goodall, N.J.; Smith, B.L.; Park, B.B. Microscopic Estimation of Freeway Vehicle Positions from the Behavior of Connected Vehicles. J. Intell. Transp. Syst. 2016, 20, 45–54. [Google Scholar] [CrossRef]
- Wang, Y.; Wei, L.; Chen, P. Trajectory Reconstruction for Freeway Traffic Mixed with Human-Driven Vehicles and Connected and Automated Vehicles. Transp. Res. Part C Emerg. Technol. 2020, 111, 135–155. [Google Scholar] [CrossRef]
- Chen, P.; Wang, T.; Zheng, N. Reconstructing Vehicle Trajectories on Freeways Based on Motion Detection Data of Connected and Automated Vehicles. J. Intell. Transp. Syst. 2022, 26, 639–654. [Google Scholar] [CrossRef]
- Chen, X.; Yin, J.; Tang, K.; Tian, Y.; Sun, J. Vehicle Trajectory Reconstruction at Signalized Intersections Under Connected and Automated Vehicle Environment. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17986–18000. [Google Scholar] [CrossRef]
- Ounoughi, C.; Ben Yahia, S. Data Fusion for ITS: A Systematic Literature Review. Inf. Fusion 2023, 89, 267–291. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Z.; Miwa, T.; Cao, P. Estimating Freeway Lane-Level Traffic State with Intelligent Connected Vehicles. Transp. Res. Rec. 2023, 2677, 60–75. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, D.; Liu, Z.; Zheng, Y.; Han, Y.; Liu, P.; Huang, W. A Data-Driven Optimization-Based Approach for Freeway Traffic State Estimation Based on Heterogeneous Sensor Data Fusion. Transp. Res. Part E Logist. Transp. Rev. 2024, 189, 103656. [Google Scholar] [CrossRef]
- Chen, X.; Qin, G.; Seo, T.; Yin, J.; Tian, Y.; Sun, J. A Macro-Micro Approach to Reconstructing Vehicle Trajectories on Multi-Lane Freeways with Lane Changing. Transp. Res. Part C Emerg. Technol. 2024, 160, 104534. [Google Scholar] [CrossRef]
- Ji, H.; Mei, J.; Wang, L.; Liu, S.; Ren, Y. Data-Driven Kalman Consensus Filtering for Connected Vehicle Speed Estimation in a Multi-Sensor Network. Symmetry 2023, 15, 1699. [Google Scholar] [CrossRef]
- Yao, Z.; Liu, M.; Jiang, Y.; Tang, Y.; Ran, B. Trajectory Reconstruction for Mixed Traffic Flow with Regular, Connected, and Connected Automated Vehicles on Freeway. IET Intell. Transp. Syst. 2024, 18, 450–466. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, D.; Liu, B.; Deng, M.; Chen, B. Exploring the Nonlinear Relationships between Human Travel and Road Traffic Congestions Using Taxi Trajectory Data. Transportation 2024. [Google Scholar] [CrossRef]
- Zha, L.; Gong, C.; Lv, K. Real-Time Localization and Navigation Method for Autonomous Vehicles Based on Multi-Modal Data Fusion by Integrating Memory Transformer and DDQN. Image Vis. Comput. 2025, 156, 105484. [Google Scholar] [CrossRef]
- Deng, Y.; Cao, Q.; Ren, G.; Ma, J.; Zhu, S. Vehicle Trajectory Reconstruction Incorporating Probe and Fixed Sensor Data. J. Transp. Eng. Part A Syst. 2023, 149, 04023088. [Google Scholar] [CrossRef]
- Banani Ardecani, F.; Mahmoudzadeh, A.; Mesbah, M. Fuzing Multiple Erroneous Sensors to Estimate Travel Time. J. Intell. Transp. Syst. 2024. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description | Value |
|---|---|---|
| Desired velocity (m/s) | 16 | |
| Safe time headway (s) | 1.5 | |
| Maximum acceleration (m/s2) | 5 | |
| Comfortable deceleration (m/s2) | 2 | |
| Minimum distance (m) | 2 |
| No. of Cycle | Reconstruction Method | MAE (m) | MAPE (%) | RMSE (m) |
|---|---|---|---|---|
| 21 | Proposed method | 12.64 | 4.35 | 14.56 |
| PV method | 14.75 | 5.64 | 17.96 | |
| Comparison | −14.31% | −22.87% | −13.36% |
| Traffic Density (veh/km) | Reconstruction Method | MAE (m) | MAPE (%) | RMSE (m) |
|---|---|---|---|---|
| 30 | Proposed method | 15.49 | 5.78 | 18.37 |
| PV method | 23.35 | 8.89 | 28.24 | |
| FS method | 21.15 | 7.95 | 25.82 | |
| 40 | Proposed method | 10.73 | 4.05 | 12.89 |
| PV method | 14.62 | 5.65 | 17.45 | |
| FS method | 16.51 | 6.24 | 20.72 | |
| 50 | Proposed method | 9.41 | 3.63 | 12.49 |
| PV method | 12.75 | 4.63 | 14.31 | |
| FS method | 15.66 | 5.91 | 18.72 |
| Penetration Rate of PVs (%) | Reconstruction Method | MAE (m) | MAPE (%) | RMSE (m) |
|---|---|---|---|---|
| 5 | Proposed method | 16.25 | 6.52 | 19.87 |
| PV method | 24.54 | 9.89 | 29.35 | |
| Comparison | −33.78% | −34.07 | −32.30% | |
| 10 | Proposed method | 10.73 | 4.05 | 12.89 |
| PV method | 14.62 | 5.65 | 17.45 | |
| Comparison | −26.61% | −28.32% | −26.13% | |
| 15 | Proposed method | 9.86 | 3.52 | 11.45 |
| PV method | 11.78 | 4.36 | 14.13 | |
| Comparison | −16.30% | −19.27% | −18.97% | |
| 20 | Proposed method | 7.35 | 3.13 | 8.36 |
| PV method | 8.67 | 3.86 | 10.16 | |
| Comparison | −15.22% | −18.91% | −17.72% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Z.; Guo, D.; Bian, L.; Liu, Y.; Zhou, B.; Sun, F. Vehicle Trajectory Reconstruction Method for Urban Arterial Roads Based on Multi-Source Data Fusion. Sensors 2025, 25, 2102. https://doi.org/10.3390/s25072102
Shi Z, Guo D, Bian L, Liu Y, Zhou B, Sun F. Vehicle Trajectory Reconstruction Method for Urban Arterial Roads Based on Multi-Source Data Fusion. Sensors. 2025; 25(7):2102. https://doi.org/10.3390/s25072102
Chicago/Turabian StyleShi, Zhanhang, Dong Guo, Lili Bian, Yvbin Liu, Bin Zhou, and Feng Sun. 2025. "Vehicle Trajectory Reconstruction Method for Urban Arterial Roads Based on Multi-Source Data Fusion" Sensors 25, no. 7: 2102. https://doi.org/10.3390/s25072102
APA StyleShi, Z., Guo, D., Bian, L., Liu, Y., Zhou, B., & Sun, F. (2025). Vehicle Trajectory Reconstruction Method for Urban Arterial Roads Based on Multi-Source Data Fusion. Sensors, 25(7), 2102. https://doi.org/10.3390/s25072102