
A Double-Layer LSTM Model Based on Driving Style and Adaptive Grid for Intention-Trajectory Prediction


Abstract
1. Introduction
- A novel double-layer LSTM model that integrates driving style and the grid of vehicle interaction is proposed for predicting target vehicle intentions and trajectory, which is superior to existing benchmarks;
- A new driving style classification method based on the inverse cruise ratio is proposed to improve the accuracy of intention prediction, and its effectiveness is verified in experiments;
- This paper proposes an adaptive grid generation strategy for vehicle interaction, and detailed analyses have been conducted in the experiments.
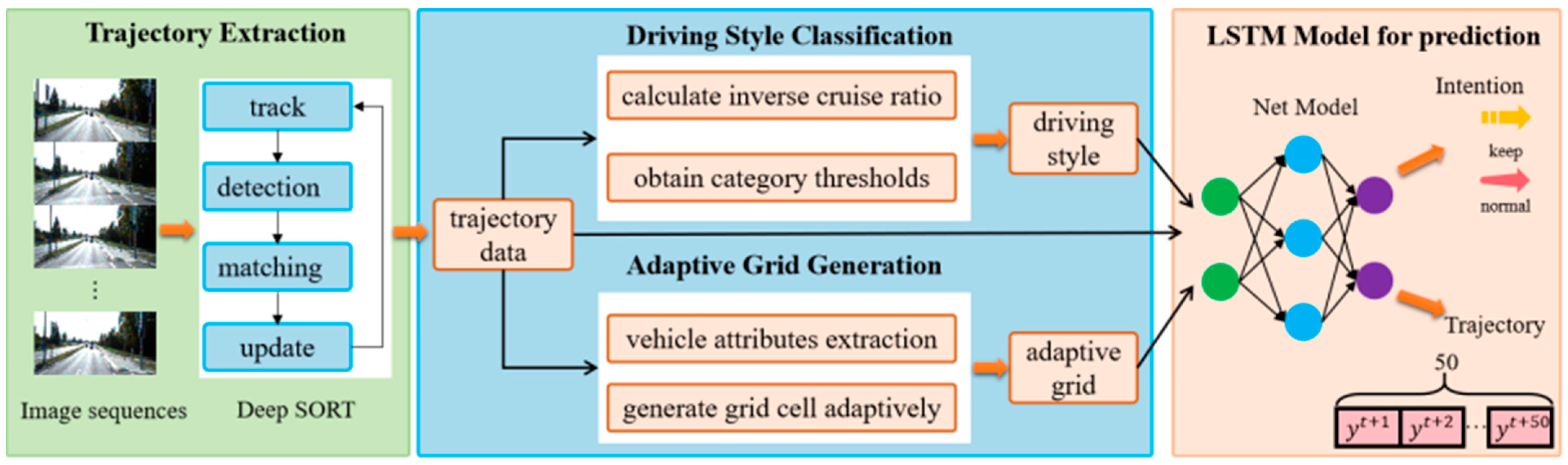
2. Methodology
2.1. Trajectory Extraction
2.2. Driving Style Classification and Adaptive Grid Generation
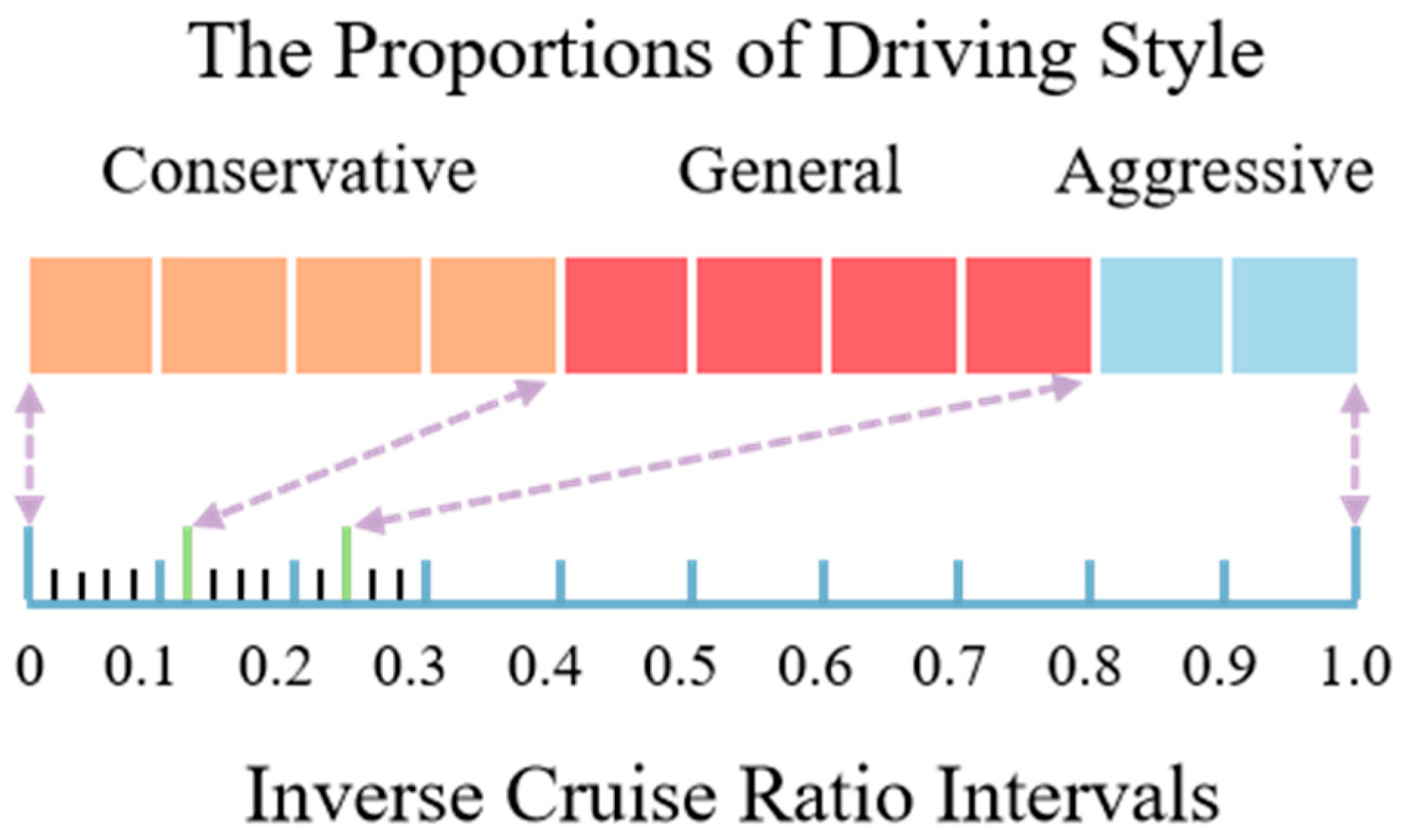
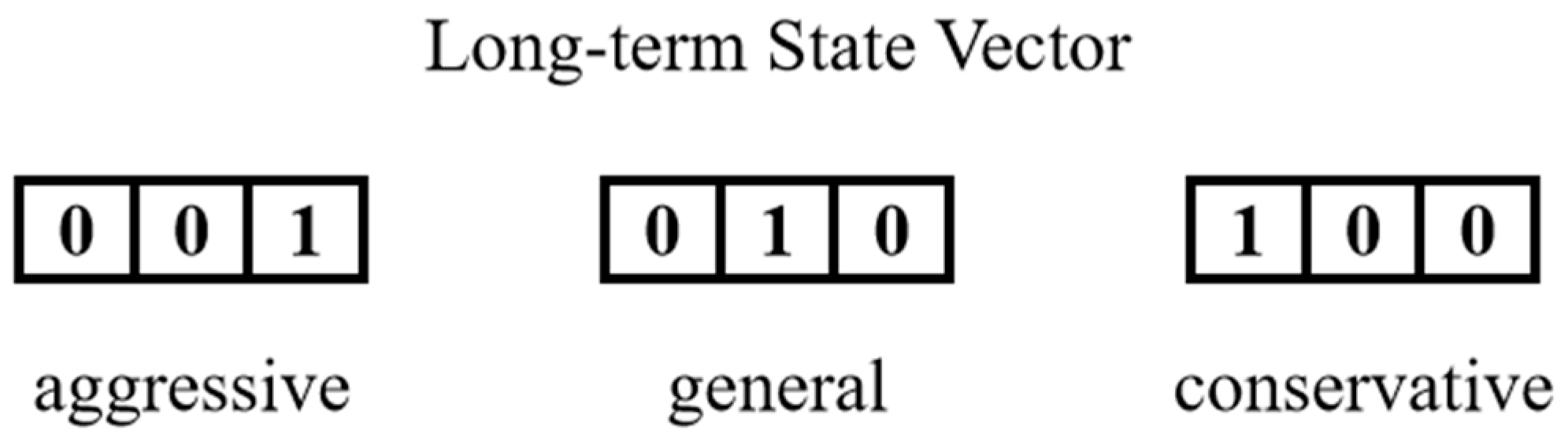
2.2.1. Driving Style Classification Based on the Inverse Cruise Ratio
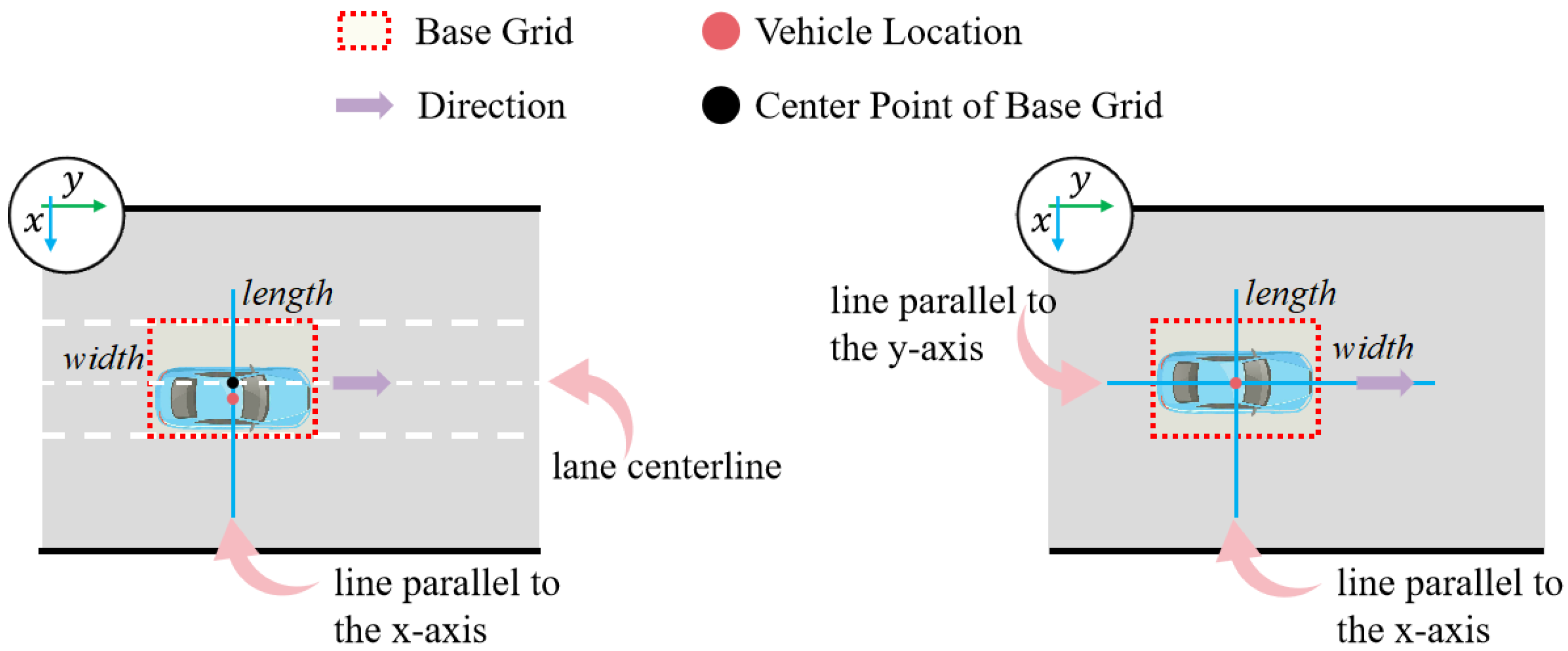
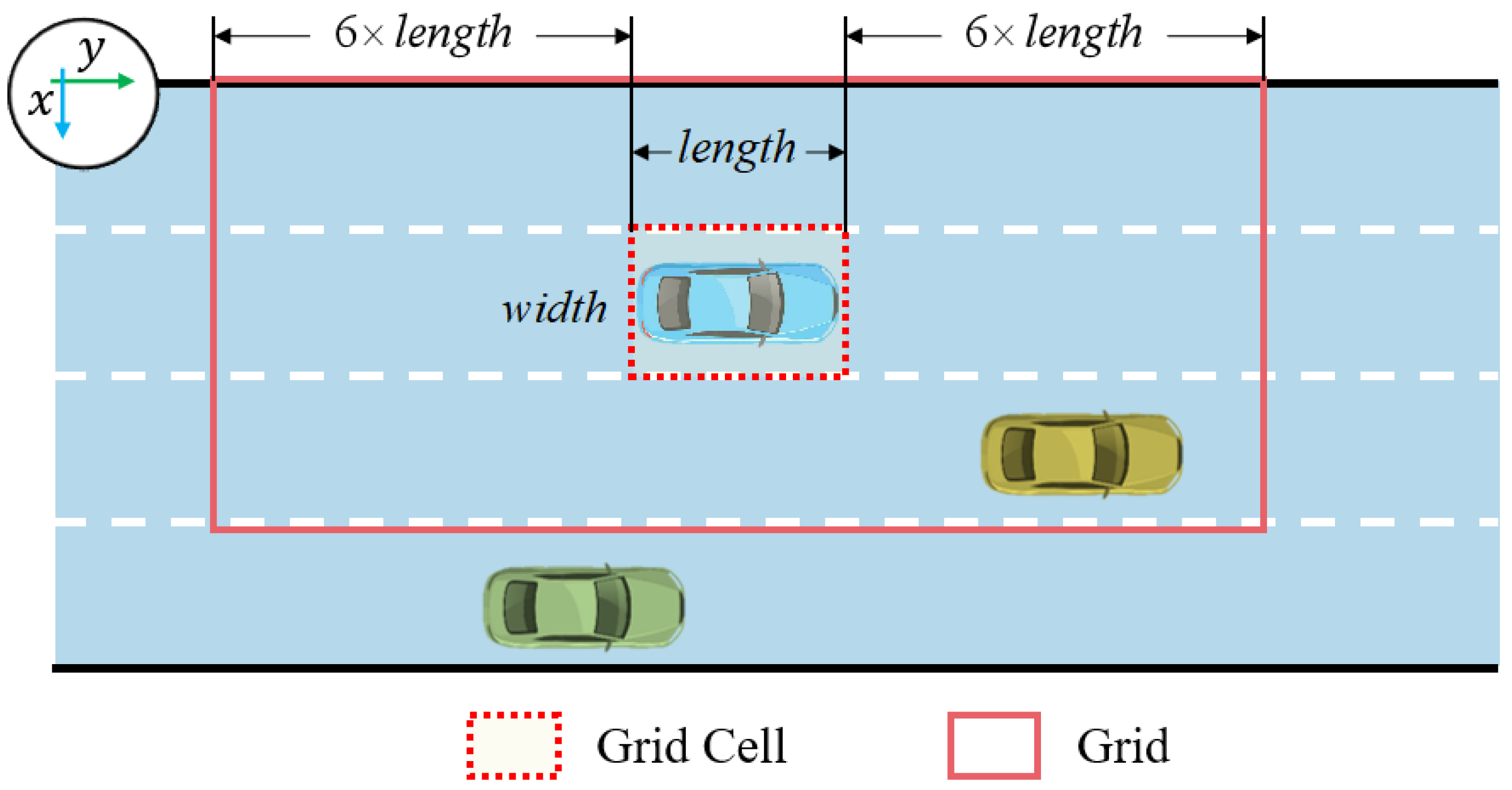
2.2.2. Adaptive Grid Generation in Vehicle Interaction
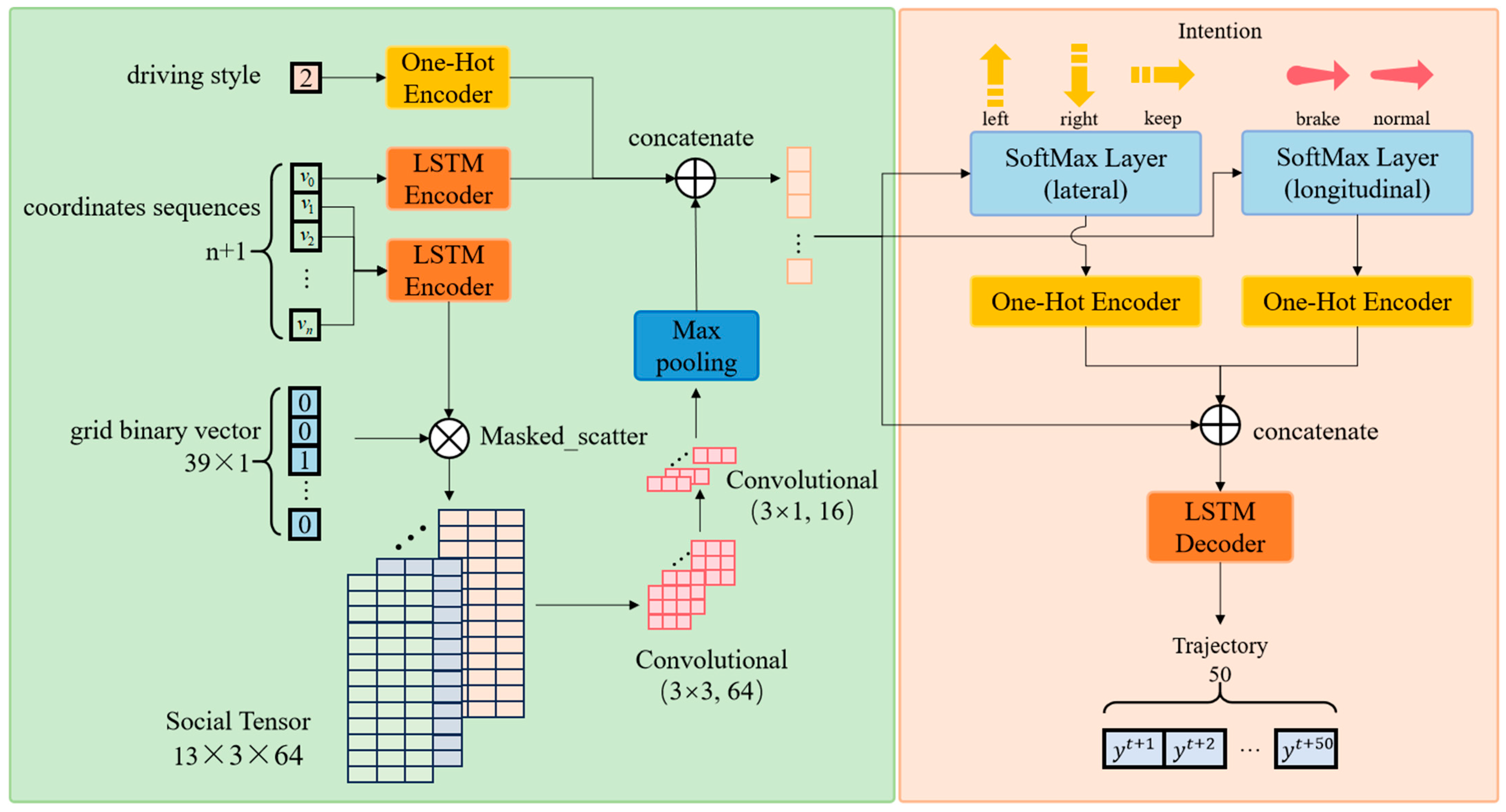
2.3. Double-Layer LSTM Model for Intention and Trajectory Prediction
2.3.1. Multiple-Input Encoder and Feature Vector Concatenation
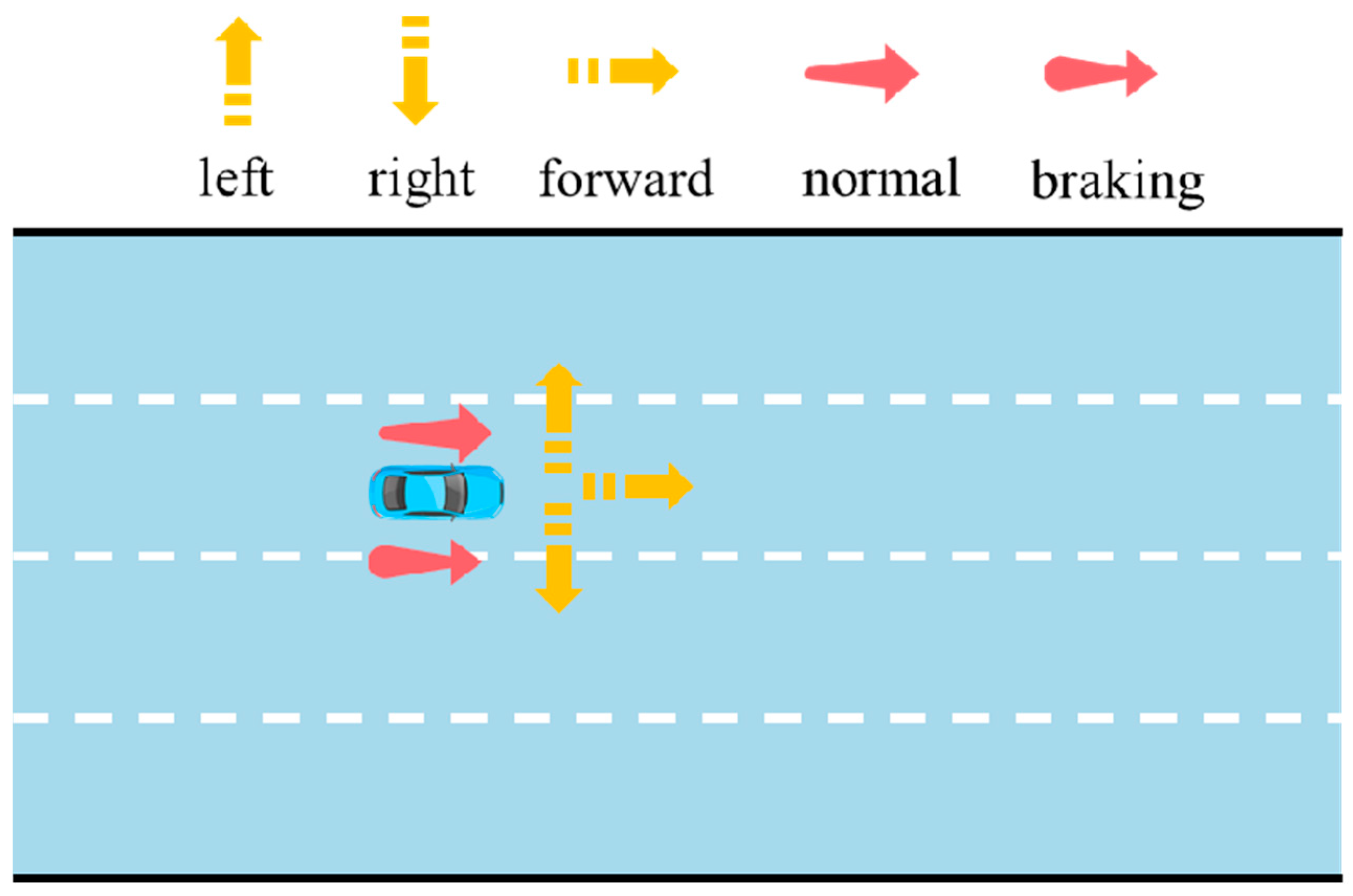
2.3.2. LSTM Decoder for Intention and Trajectory Prediction
2.3.3. Model Training Configuration
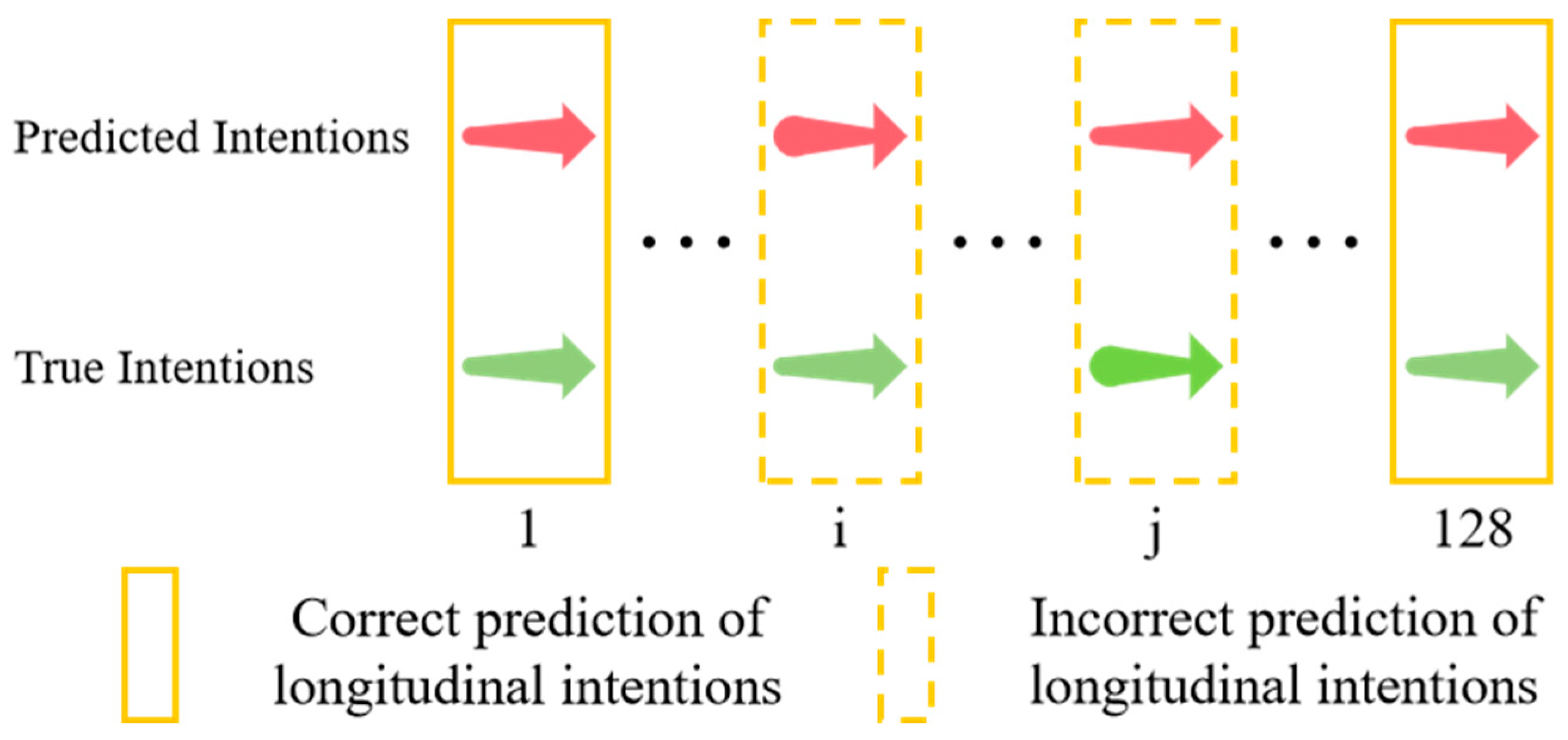
2.3.4. Performance Evaluation Indicators
3. Experiments
3.1. Experimental Description
3.2. Experimental Results Comparison
3.3. Sliding Window Length Comparison
3.4. Grid Size Comparison in Vehicle Interaction
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LSTM | Long Short-Term Memory |
| RMSE | Root Mean Square Error |
| Social-LSTM | Social-Long Short-Term Memory |
| AI | Artificial Intelligence |
| RNN | Recurrent Neural Networks |
| SORT | Simple Online and Real-Time Tracking |
| FC | Fully Connected |
| CS-LSTM | Convolutional Social Long Short-Term Memory |
| AVs | Autonomous Vehicles |
| NGSIM | Next Generation Simulation |
| MTF-LSTM | Mixed Teaching Force Long Short-Term Memory |
References
- Huang, Y.; Du, J.; Yang, Z.; Zhou, Z.; Zhang, L.; Chen, H. A Survey on Trajectory-Prediction Methods for Autonomous Driving. IEEE Trans. Intell. Veh. 2022, 7, 652–674. [Google Scholar] [CrossRef]
- Chen, G.; Chen, K.; Zhang, L.; Zhang, L.; Knoll, A. VCANet: Vanishing-Point-Guided Context-Aware Network for Small Road Object Detection. Automot. Innov. 2021, 4, 400–412. [Google Scholar] [CrossRef]
- Huang, C.; Hang, P.; Hu, Z.; Lv, C. Collision-Probability-Aware Human-Machine Cooperative Planning for Safe Automated Driving. IEEE Trans. Veh. Technol. 2021, 70, 9752–9763. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y.; Zhou, Z.; Nam, K.; Wei, C.; Yin, C. Trajectory Prediction of Preceding Target Vehicles Based on Lane Crossing and Final Points Generation Model Considering Driving Styles. IEEE Trans. Veh. Technol. 2021, 70, 8720–8730. [Google Scholar] [CrossRef]
- Qu, X.; Pi, D.; Zhang, L.; Lv, C. Advancements on Unmanned Vehicles in the Transportation System. Green Energy Intell. Trans. 2023, 2, 100091. [Google Scholar] [CrossRef]
- Lefèvre, S.; Vasquez, D.; Laugier, C. A Survey on Motion Prediction and Risk Assessment for Intelligent Vehicles. ROBOMECH J. 2014, 1, 1. [Google Scholar] [CrossRef]
- Althoff, M.; Mergel, A. Comparison of Markov Chain Abstraction and Monte Carlo Simulation for the Safety Assessment of Autonomous Cars. IEEE Trans. Intell. Trans. Syst. 2011, 12, 1237–1247. [Google Scholar] [CrossRef]
- Wang, H.; Liu, B.; Ping, X.; An, Q. Path Tracking Control for Autonomous Vehicles Based on an Improved MPC. IEEE Access 2019, 7, 161064–161073. [Google Scholar] [CrossRef]
- Akhtar, S.; Habibi, S. The Interacting Multiple Model Smooth Variable Structure Filter for Trajectory Prediction. IEEE Trans. Intell. Trans. Syst. 2023, 24, 9217–9239. [Google Scholar] [CrossRef]
- Okamoto, K.; Berntorp, K.; Di Cairano, S. Driver Intention-Based Vehicle Threat Assessment Using Random Forests and Particle Filtering. IFAC-PapersOnLine 2017, 50, 13860–13865. [Google Scholar] [CrossRef]
- Deo, N.; Rangesh, A.; Trivedi, M.M. How Would Surround Vehicles Move? A Unified Framework for Maneuver Classification and Motion Prediction. IEEE Trans. Intell. Veh. 2018, 3, 129–140. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Zuo, Z.; Li, Z.; Wang, L.; Luo, X. Trajectory Planning and Safety Assessment of Autonomous Vehicles Based on Motion Prediction and Model Predictive Control. IEEE Trans. Veh. Technol. 2019, 68, 8546–8556. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Zhao, W.; Xu, C. Decision-Making and Planning Method for Autonomous Vehicles Based on Motivation and Risk Assessment. IEEE Trans. Veh. Technol. 2021, 70, 107–120. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhu, B.; Yang, S.; Zhao, J.; Deng, W. Vehicle Trajectory Prediction Considering Driver Uncertainty and Vehicle Dynamics Based on Dynamic Bayesian Network. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 689–703. [Google Scholar] [CrossRef]
- Lefkopoulos, V.; Menner, M.; Domahidi, A.; Zeilinger, M.N. Interaction-Aware Motion Prediction for Autonomous Driving: A Multiple Model Kalman Filtering Scheme. IEEE Robot. Autom. Lett. 2021, 6, 80–87. [Google Scholar] [CrossRef]
- Bahram, M.; Hubmann, C.; Lawitzky, A.; Aeberhard, M.; Wollherr, D. A Combined Model- and Learning-Based Framework for Interaction-Aware Maneuver Prediction. IEEE Trans. Intell. Trans. Syst. 2016, 17, 1538–1550. [Google Scholar] [CrossRef]
- Zhang, S.; Zhi, Y.; He, R.; Li, J. Research on Traffic Vehicle Behavior Prediction Method Based on Game Theory and HMM. IEEE Access 2020, 8, 30210–30222. [Google Scholar] [CrossRef]
- Hammer, B. On the Approximation Capability of Recurrent Neural Networks. Neurocomputing 2000, 31, 107–123. [Google Scholar] [CrossRef]
- Alahi, A.; Goel, K.; Ramanathan, V.; Robicquet, A.; Fei-Fei, L.; Savarese, S. Social LSTM: Human Trajectory Prediction in Crowded Spaces. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 961–971. [Google Scholar]
- Zyner, A.; Worrall, S.; Nebot, E. A Recurrent Neural Network Solution for Predicting Driver Intention at Unsignalized Intersections. IEEE Robot. Autom. Lett. 2018, 3, 1759–1764. [Google Scholar] [CrossRef]
- Zyner, A.; Worrall, S.; Nebot, E. Naturalistic Driver Intention and Path Prediction Using Recurrent Neural Networks. IEEE Trans. Intell. Trans. Syst. 2020, 21, 1584–1594. [Google Scholar] [CrossRef]
- Deo, N.; Trivedi, M.M. Convolutional Social Pooling for Vehicle Trajectory Prediction. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018; pp. 1468–1476. [Google Scholar]
- Cui, H.; Nguyen, T.; Chou, F.-C.; Lin, T.-H.; Schneider, J.; Bradley, D.; Djuric, N. Deep Kinematic Models for Kinematically Feasible Vehicle Trajectory Predictions. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 10563–10569. [Google Scholar]
- Chandra, R.; Bhattacharya, U.; Bera, A.; Manocha, D. TraPHic: Trajectory Prediction in Dense and Heterogeneous Traffic Using Weighted Interactions. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 8475–8484. [Google Scholar]
- Yang, B.; Fan, F.; Ni, R.; Wang, H.; Jafaripournimchahi, A.; Hu, H. A Multi-Task Learning Network With a Collision-Aware Graph Transformer for Traffic-Agents Trajectory Prediction. IEEE Trans. Intell. Trans. Syst. 2024, 25, 6677–6690. [Google Scholar] [CrossRef]
- Yang, B.; Lu, Y.; Wan, R.; Hu, H.; Yang, C.; Ni, R. Meta-IRLSOT++: A meta-inverse reinforcement learning method for fast adaptation of trajectory prediction networks. Expert Syst. Appl. 2024, 240, 122499. [Google Scholar] [CrossRef]
- Yang, B.; Yan, K.; Hu, C.; Hu, H.; Yu, Z.; Ni, R. Dynamic Subclass-Balancing Contrastive Learning for Long-Tail Pedestrian Trajectory Prediction with Progressive Refinement. IEEE Trans. Autom. Sci. Eng. 2024. [Google Scholar] [CrossRef]
- Karlsson, J.; van Waveren, S.; Pek, C.; Torre, I.; Leite, I.; Tumova, J. Encoding Human Driving Styles in Motion Planning for Autonomous Vehicles. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 1050–1056. [Google Scholar]
- Yu, R.; Zhang, X.; He, Y.; Wu, X. Driving Distraction Recognition Based on Probability Distribution Evolution Characteristics of Driving Behaviors. J. Tongji Univ. Nat. Sci. 2024, 52, 1899–1908. [Google Scholar] [CrossRef]
- Wojke, N.; Bewley, A.; Paulus, D. Simple Online and Realtime Tracking with a Deep Association Metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar]
- Liang, K.; Zhao, Z.; Li, W.; Zhou, J.; Yan, D. Comprehensive Identification of Driving Style Based on Vehicle’s Driving Cycle Recognition. IEEE Trans. Veh. Technol. 2023, 72, 312–326. [Google Scholar] [CrossRef]
- U.S. Department of Transportation Federal Highway Administration. Next Generation Simulation (NGSIM) Vehicle Trajectories and Supporting Data. [Dataset]. Provided by ITS DataHub Through Data.transportation.gov. 2016. Available online: https://data.transportation.gov/Automobiles/Next-Generation-Simulation-NGSIM-Vehicle-Trajector/8ect-6jqj (accessed on 24 January 2025).
- Kuefler, A.; Morton, J.; Wheeler, T.; Kochenderfer, M. Imitating Driver Behavior with Generative Adversarial Networks. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 204–211. [Google Scholar]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision Meets Robotics: The KITTI Dataset. Inter. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef]
- Fang, H.; Liu, L.; Xiao, X.; Gu, Q.; Meng, Y. Vehicle Trajectory Prediction Based on Mixed Teaching Force Long Short-term Memory. J. Trans. Syst. Eng. Inf. Technol. 2023, 23, 80–87. [Google Scholar] [CrossRef]
- Ding, Z.; Xu, D.; Tu, C.; Zhao, H.; Moze, M.; Aioun, F.; Guillemard, F. Driver Identification Through Heterogeneity Modeling in Car-Following Sequences. IEEE Trans. Intell. Trans. Syst. 2022, 23, 17143–17156. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driving Styles | Trajectory Counts | Proportion |
|---|---|---|
| Conservative | 4645 | 39.43% |
| Average | 4630 | 39.31% |
| Aggressive | 2504 | 21.26% |
| Evaluation Metric | RMSE (m) | Lateral Intention Accuracy Rate | Longitudinal Intention Accuracy Rate | ||||
|---|---|---|---|---|---|---|---|
| 1 s | 2 s | 3 s | 4 s | 5 s | |||
| This Paper | 0.57 | 1.26 | 2.09 | 3.11 | 4.37 | 98.50% | 92.38% |
| CS-LSTM | 0.59 | 1.29 | 2.15 | 3.24 | 4.60 | 97.75% | 90.45% |
| MTF-LSTM | 0.52 | 1.06 | 1.96 | 3.27 | 4.86 | \ | \ |
| Evaluation Metric | RMSE (m) | Lateral Intention Accuracy Rate | Longitudinal Intention Accuracy Rate | ||||
|---|---|---|---|---|---|---|---|
| 1 s | 2 s | 3 s | 4 s | 5 s | |||
| This Paper | 0.95 | 2.32 | 4.16 | 6.88 | 10.57 | 87.29% | 90.52% |
| CS-LSTM | 0.98 | 2.39 | 4.54 | 7.54 | 11.25 | 87.70% | 87.48% |
| Evaluation Metric | RMSE (m) | Lateral Intention Accuracy Rate | Longitudinal Intention Accuracy Rate | ||||
|---|---|---|---|---|---|---|---|
| 1 s | 2 s | 3 s | 4 s | 5 s | |||
| No Style | 0.59 | 1.29 | 2.15 | 3.24 | 4.60 | 97.75% | 90.45% |
| 15 s length | 0.57 | 1.27 | 2.12 | 3.18 | 4.50 | 98.53% | 92.18% |
| 14 s length | 0.57 | 1.28 | 2.15 | 3.27 | 4.63 | 98.52% | 92.28% |
| 13 s length | 0.57 | 1.26 | 2.09 | 3.15 | 4.43 | 98.51% | 92.35% |
| 12 s length | 0.57 | 1.26 | 2.09 | 3.11 | 4.37 | 98.50% | 92.38% |
| 11 s length | 0.58 | 1.26 | 2.09 | 3.13 | 4.42 | 98.50% | 92.56% |
| 10 s length | 0.56 | 1.25 | 2.08 | 3.12 | 4.41 | 98.57% | 92.59% |
| Evaluation Metric | RMSE (m) | Lateral Intention Accuracy Rate | Longitudinal Intention Accuracy Rate | ||||
|---|---|---|---|---|---|---|---|
| 1 s | 2 s | 3 s | 4 s | 5 s | |||
| Lane and Fixed Size | 0.57 | 1.26 | 2.10 | 3.16 | 4.48 | 98.50% | 92.49% |
| Lane and Adaptive Length | 0.57 | 1.26 | 2.09 | 3.11 | 4.37 | 98.50% | 92.38% |
| Adaptive Size | 0.58 | 1.30 | 2.19 | 3.27 | 4.57 | 98.35% | 92.44% |
| Minimum Size | 0.62 | 1.48 | 2.60 | 4.01 | 5.69 | 98.30% | 91.20% |
| Average Size | 0.57 | 1.27 | 2.12 | 3.17 | 4.47 | 98.39% | 92.50% |
| Maximum Size | 0.56 | 1.22 | 1.97 | 2.85 | 3.90 | 98.39% | 92.80% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Zhang, W.; Zhang, W.; Zhang, D.; He, L. A Double-Layer LSTM Model Based on Driving Style and Adaptive Grid for Intention-Trajectory Prediction. Sensors 2025, 25, 2059. https://doi.org/10.3390/s25072059
Fan Y, Zhang W, Zhang W, Zhang D, He L. A Double-Layer LSTM Model Based on Driving Style and Adaptive Grid for Intention-Trajectory Prediction. Sensors. 2025; 25(7):2059. https://doi.org/10.3390/s25072059
Chicago/Turabian StyleFan, Yikun, Wei Zhang, Wenting Zhang, Dejin Zhang, and Li He. 2025. "A Double-Layer LSTM Model Based on Driving Style and Adaptive Grid for Intention-Trajectory Prediction" Sensors 25, no. 7: 2059. https://doi.org/10.3390/s25072059
APA StyleFan, Y., Zhang, W., Zhang, W., Zhang, D., & He, L. (2025). A Double-Layer LSTM Model Based on Driving Style and Adaptive Grid for Intention-Trajectory Prediction. Sensors, 25(7), 2059. https://doi.org/10.3390/s25072059